What happens when we go from macro to nano What material ...

227
Dynamics of Macro–Nano Mechanical Systems; Fixed Interfacial Multiscale Method
M.H.Korayem*,S.Sadeghzadeh
RoboticResearchLaboratory,CenterofExcellenceinExperimentalSolidMechanicsandDynamics,SchoolofMechanicalEngineering,IranUniversityofScienceandTechnology,Tehran,I.R.Iran
(*)Correspondingauthor:[email protected](Received:05 Sep. 2012 and Accepted: 20 Dec. 2012)
Abstract:The continuum based approaches don’t provide the correct physics in atomic scales. On the other hand, the molecular based approaches are limited by the length and simulated process time. As an attractive alternative, this paper proposes the Fixed Interfacial Multiscale Method (FIMM) for computationally and mathematically efficient modeling of solid structures. The approach is applicable to multi-body mechanical systems. In FIMM, a direct link between the nano field atoms and macro field nodes by the local atomic volume displacements associated with every macro field node in their common zone has been replaced with the previous methods. For a complete model of the macro section, a nine-noded Lagrange element has been developed, and for small dimensions, the Sutton-Chen potential (for problems of mechanics) has been used. In the presented model, the undesirable effects of free surfaces, common surfaces, and surfaces close to the interface with the macro field have been eliminated, and after presenting a practical and noteworthy procedure for the dynamics of systems in general, seven problems (in the form of three examples) have been offered to showcase the practicality, simplicity, and the effectiveness of this method. Keywords: Multi-scale model; Open systems; Dynamics; Macro/nano mechanics; coupling model, FIMM.
Int. J. Nanosci. Nanotechnol., Vol. 8, No. 4, Dec. 2012, pp. 227-246
1.INTRODUCTION
Although they have been extensively applied forsimulation of large scales, the continuum mechanics-basedmethods,includingthefiniteelementorothernumericalmethods,don’tprovidethecorrectphysicsin atomic scales. Table 1 lists a complete span ofvarious scales and models in material modeling.Upontheappearanceofadvancedtechnologies,theinterfacialbehaviorofmacro(large)tonano(small)scales has been discussed. Connectivity ofmodelsinvariousscaleswasthefirstandthebestapproachofcourse.ThisapproachnamedMultiscalemethodandhasbeenstudiedanddevelopedinalotofworksfor various systems. In multi-scale approaches,implementation of molecular based modelsguarantees the correctness of obtained behaviorin small scales; while for larger dimensions that
don’t have tangible nonlinear behavior, utilizationof continuum mechanics (CM) based methods iseffective,andthereisnoneedtospendalotoftimebyapplicationoftheatomicmodelsfortheseparts.Therefore,thecontinuummechanicsmodelsandtheatomicmodelsinteractwitheachotherinsuchawayastomodelthewholesystemandachievethegoalwhichhasbeendefinedandset.Duringthelastdecades,alotofeffortshavebeenconducted to provide the numerical solutions formacro field. As was pointed out in the previoussection,thecommonconventionalmodelshavemanylimitations.Despitetheirreasonablecomputationalcosts,thecontinuummechanicsmethodsaretotallyincapable of describing phenomena in the nanoscale.Onthehand,moleculardynamicsmodelsarevery limited with respect to the time dimension;as themodelingof objects in themicrometer and

228
microseconddimensionsisonlypossiblebymeansof supercomputers. So, researchers are trying to use theadvantagesoftheaforementionedmethodsandtoovercometheexistingflawsbycombiningthemtogether.Theoutcomeoftheseeffortshasbeenthedevelopmentofmulti-scalemethods.Multi-scalemethodsaredividedinto“hierarchical”and “concurrent” groups. In the hierarchicalmodels, the properties are calculated at one scaleand then passed on to another scale. In otherwords, the information obtained from one modelis enriched by another model. These approachesincludetwogroups,inwhich,theinformationfrommicro-scalesystemsistransferredtothecontinuummechanicsmodel. The first group are themodelsbased on the Cauchy-Born hypothesis [1, 2], inwhich, the information acquired from the atomic
structure of the object clearly reveal themselvesin the calculation of the elastic stress and tensorof thematerial’s properties. The second group ofthesemodelsisbasedontheVirtualAtomCluster(VAC)[3],inwhich,thestructureofthematerialisenriched on the basis of the information obtainedfrommolecularmechanics.Thismethodhasbeenusedforthestudyofcarbonnanotubes.In the concurrent models, there are severalsimultaneousmodelsinthemulti-scalesimulation,and information is exchanged among themconcurrently. These methods are the result ofefforts that have tried to combine the moleculardynamics models with the continuum mechanicsmodels.Over thepastdecadethisgroupofmulti-scalemodelshasreceivedconsiderableattentioninthe literature. It includes various frameworks, but
KorayemandSadeghzadeh
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
2-IntroductionAlthough they have been extensively applied for simulation of large scales, the continuum mechanics based methods, including the finite element or other numerical methods, don't provide the correct physics in atomic scales. Table 1 lists a complete span of various scales and models in material modeling. Upon the appearance of advanced technologies, the interfacial behavior of macro (large) to nano (small) scales has been discussed. Connectivity of models in various scales was the first and the best approach of course. This approach named Multiscale method and has been studied and developed in a lot of works for various systems. In multi-scale approaches, implementation of molecular based models guarantees the correctness of obtained behavior in small scales; while for larger dimensions that don't have tangible nonlinear behavior, utilization of continuum mechanics (CM) based methods is effective, and there is no need to spend a lot of time by application of the atomic models for these parts. Therefore, the continuum mechanics models and the atomic models interact with each other in such a way as to model the whole system and achieve the goal which has been defined and set.
Table 1. A complete span of various models in material modeling LengthScale Subatomic Nano Micro MacroTimeScale Sub nano Sec Nano Sec Micro Sec Sec
Theory
Features
Small scale approaches Multiscale approaches Large scale approaches
Quantum Mechanics MD SCGMD CM-MD
coupling CM-SCGMD
coupling
Continuum Mechanics
(CM) Structureunit
UnitShape
Phonons Atom Site Element-Atom Element-Site Element
SystemShape
Lattice
Deformation Discrete Discrete Discrete Continuous-Discrete
Continuous-Discrete Continuous
TimeScale Below 1pSec 1fSec-1nSec 1fSec-1μSec 1nSec- 1 mSec 1nSec-1Sec 1mSec-several hours
LengthScale 1fm-1A 1A - 10nm 1fm-100nm 1nm-10μm 1nm-1mm 1μm-several meters
Applicableto Sub atomic studies
Molecular sciences
Nano to micro
Medicine
NEMS, Nanorobotics, manipulation, drug delivery
Nanorobotics,MEMs, NEMS
Macro scale systems
Notapplicableto
Super nano metric systems
Macro processes in
long duration
Super micro processes with large time scales
Molecular sciences and sub atomic
studies
Molecular sciences and sub atomic
studies
Small, huge and non
homogeneous systems
Table1:A complete span of various models in material modeling

229
threemajormethodsmaybeaddressed.Thequasi-continuummethod[4,5],whichwaspresentedbyOrtiz et al., is now themost appliedmethod, andmanystudieshavebeenconductedonthismethod.The othermodel is theBridgingDomainmethod[6],whichhasbeendevelopedbyBelytschkoetal.Inthismethod, inpartof thesimulationzone, thecontinuum domain and the atoms exist together;therefore,thevalidityofthismodelinthebridgingdomain needs to be investigated extensively. Thethirdapproach,knownastheBridgingScalemethod[7,8],hasbeenpresentedbyLiuandhiscolleagues.In this method, it is assumed that the continuumsolution is not exact and the resulting error canbe removed through molecular dynamics. Themost important issue in the development of thesehybrid methods has been the formulation of acomprehensive computational coupling along theinterface. This fact has been revealed in a brief review ofthe developed and presented methods. In thecoupling models, the continuity of the material’scharacteristics should be preserved during thetransition from the atomic forces to the stress-strain field of continuum mechanics. Couplingmodels have been developed formany problems,including the crack problem, and they have oftenbeen named Finite Element–Atomistic (Feat)coupling procedure, which is the combination ofmolecular dynamics and finite element models.Likewise, a general formulation of the ordinaryfiniteelement,whichallowstheMacroField(MF)nodestobeexaminedascoarseandfineNanoField(NF)atoms,hasresultedinanothercomputationalschemeforthecouplingofthecontinuumandtheatomic environments, called the Coarse-GrainedMolecularDynamic(CGMD).TheQuasi-Continuum(QC)methodthathasbeenstudied by Miller and Tadmor [9] is explicitlybased on the complete description of amaterial’senvironment. The Coupled Atomistic/DislocationDynamics (CADD)methodofShilkrot et al. [10]has been presented for the simulation, detection,and justification of the separations between theatomicandthecontinuumregions.Thismodelhadfirst been offered for the simulation of materialsat zero degreesKelvin (0K), but recently, it hasbeen developed to deal with the effects of finitetemperatureaswell.The general characteristic of these approaches,
for the atomic and continuum coupling, has beenthe fine-graining and manipulation of MF meshconfiguration for conformity with atomic lengthscales, and also the kinematic coupling of finiteelementnodestodiscreteatomsalonganinterface.Henceforth, the approaches that make a one to one couplingbetweentheatomsandfiniteelementarecalledDirectCoupling(DC).When DC procedures are followed, the majorproblem that arises is the inherent differencebetween the atomic and the continuumcomputational models. The physical state of theatomic region is described bymeans of the non-local inner-molecular forces between discreteatomswithspecificpositionandmoment;whilethephysicalstateofthecontinuumregionisdescribedbyusingthestress-strainfieldswhicharestatisticalaveragesoftheatomicattractionsatlargerscalesoflength and time.Generally, the ordinary couplingbetweendiscreteandcontinuumvaluescanonlybeobtainedbytakingastatisticalaverageofthescalesin which the discreteness of the atomic structurecanbeapproximatedinthequasi-continuumform.Although, much better ways could be offeredfor the development of methods of coupling ofthe continuum domain with discrete domain,nevertheless, the application and development ofthesemethodsforthestaticanddynamicproblemsrelated to mechanical engineering is highlyimportant. Uptonow,theFEMwasthemostappliedapproachfor macro part of coupling models; while, muchbetterandmoreaccuratemethods,andevenmoreexact numerical methods, exist for this purpose.Thus, in describing the problem, instead of thefinite element method, the more general form offiniteelement,i.e.theMFsolutionmethod,isused.Basedonthisnotion,wetrytopresentamodelthatcanbeattachedtothefiniteelementmethodwithoutanyrestriction,andcanbeusedwithothermethodsaswell.Sofar,variousNF-MFcouplingframeworkshavebeenpresented.The work of ParkandLiu[11]isanattempttodescribethemultiscalemethodideas and capabilities in the field of solidstructures. Recently, some concentrated groupshave focused on the multiscale approaches forvarious applications. They introduced variousframeworkswithcapabilitiesofapplicationtosolidstructures. For instance, Macroscopic Atomistic
InternationalJournalofNanoscienceandNanotechnology

230
Ab initio Dynamics (MAAD) method [12, 13],Heterogeneous Multiscale Method (HMM) [14],MultiscaleFieldTheory(MFT)[15]andEmbeddedStatisticalCouplingMethod(ESCM)[16]maybeaddressed.In this paper, a Fixed Interfacial MultiscaleMethod (FIMM) is proposed for computationallyand mathematically efficient modeling of solidstructures.Theapproachisapplicabletomulti-bodymechanicalsystems.InFIMM,adirectlinkbetweenthenanofieldatomsandmacrofieldnodesbythelocalatomicvolumedisplacementsassociatedwitheverymacrofieldnode in theircommonzonehasbeenreplacedwiththepreviousmethods.Moreover, considering the mechanics of theproblem,andusingasystemofequationsinmatrixform,adynamicalgorithmhasbeenpresentedfordynamically solving the problem.Themacro andnanofield’scomputationalsystemsareindependentof each other and only relate through an iterativeupdate of their boundary conditions.Thismethodpresents an improvedcoupling approachwhich isinherentlyapplicabletothree-dimensionaldomains.In addition, it prevents the resolving of thecontinuum model into atomic resolution, andallowsfinite temperaturecases tobeapplied.Oneof the prominent features of the present work isthe presentation of reliable solutions for problems that include natural, forced, body, and interfacialdegrees of freedom. Since solids are fairly rigidat the macro zone, the interfacial volume of theconsidered systemhas beenmoved tomacro partandthen,itassumedtoberigid.Thus, FIMM leaves negligible relative motionof atoms in every atomic volume bymoving theinterface into themacropart.Now,previousnanofield and a bit of macro part form the new nanofield.Thisleadstolargerdimensionsfornanofieldwith regard to the last one.Onemajor differencebetween ESCM and FIMM is the constraint ofcoupling, where ESCM uses a local average ofatomsincludedinaninterfacialvolume.In the following, both the macro (continuummodel) and nano (atomistic model) field theoriesare discussed briefly first. Then, FIMM has beenpresented in details and validated by comparisonwithMD,CGMD,ESCMandMAADapproaches
foraclampedsiliconwaferinplanestraincondition.At the end several useful results and discussionhavebeenintroduced
2.ANOVERVIEWOFFEMANDMD
ExtensiveworkhasbeendoneonthedevelopmentofFiniteElementMethodforvarioussystems.Sincein mechanical systems, usually the macro section hasamovingpartandasensingpart,andthesepartsoftenoperatebymeansofthepiezoelectricproperty,we try to deal with the macro section from thisperspective.Rajeevkumar et al. [17] investigateda finite element model for the active control ofinduced thermal vibration in layered compositeshells with piezoelectric sensors and actuators(piezothermoelastic).Then, theypresentedafiniteelementformulationforthemodelingofstaticanddynamic responses of multi-layered compositeshells with integrated piezoelectric sensors andactuators, and subjected tomechanical, electrical,andthermalloadings[18].In 2008, Zia et al. [19] have presented a finiteelement formulation for the vibrations of layeredpiezoceramicplates,whichaccountsfortheeffectsofhystereticbehavior.ThehystereticbehaviorhasbeensimulatedinthedielectricdomainbyusingthefiniteelementmethodandapplyingtheIshlinskii’smodel.In2008,BalamuruganandNarayanan[20]haveusedanine-nodedpiezolaminateddegeneratedshellelementinordertomodelandanalyzemulti-layered composite shell structures together withsensorsandpiezoelectricactuators.Thecoordinatesofanyarbitraryparameter,atanyarbitrarypointcanbeexpressedbytheuseofnodalcoordinates and isoparametric shape functions inthefollowingway
1( , , ) ( )
Q
i ii
Xξ η ζ=
= ℵ∑P P
(1)
WhereP is the noted parameter,ℵ is the isoparametric functions,Q is number of nodes oftheconsideredelement,andX is the position of the nodes.Byusingthekinetic,potentialandexternalenergiesandwritingtheminimumenergyprinciple,theequationsofmotionforthefiniteelementsystemcanbepresentedas:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
integrated piezoelectric sensors and actuators, and subjected to mechanical, electrical, and thermal loadings [18].
In 2008, Zia et al. [19] have presented a finite element formulation for the vibrations of layered piezoceramic plates, which accounts for the effects of hysteretic behavior. The hysteretic behavior has been simulated in the dielectric domain by using the finite element method and applying the Ishlinskii's model. In 2008, Balamurugan and Narayanan [20] have used a nine-noded piezolaminated degenerated shell element in order to model and analyze multi-layered composite shell structures together with sensors and piezoelectric actuators.
The coordinates of any arbitrary parameter, at any arbitrary point can be expressed by the use of nodal coordinates and isoparametric shape functions in the following way
1( , , ) ( )
Q
i ii
X
P P (1)
Where P is the noted parameter, is the isoparametric functions, Q is number of
nodes of the considered element, and X is the position of the nodes. By using the kinetic, potential and external energies and writing the minimum energy principle, the equations of motion for the finite element system can be presented as:
1 1e e e qe ee e e e
M q C q K K K K q F K K F uu uu uu u u u (2)
where eM uu , eK uu , e
K u , q eF , e
K , eF , eC uu , and eq are respectively, the
element's mass matrix, stiffness matrix, electromechanical coupling hardness matrix, mechanical load, dielectric hardness matrix, electric force vector, structural damping matrix, and the vector of change of degrees of freedom in the considered system.
In MD, a well defined potential function 1 2, , , NU r r r expresses the manner of
dependency of the potential energy of a system consisting of N atoms with the space coordinates 1 2, , , Nr r r . The equation of motion of all atoms model can be expressed as
i i i im =-r U+F (3)
Where, m and F are the mass of atoms and external (boundary) forces. The Finite Difference Method (FDM) is the usual approach for solving the differential equations of motion. FDM includes various approaches for analyzing the problem. Verlet and Velocity Verlet algorithms are the most famous methods. These algorithms are combination of the forward and backward Taylor expansions [21].
In addition to the Lenard Jones potential as a famous one, the Embedded Atom Potential (EAM), Finnis-Sinclair potential [22] and Sutton-Chen potential [23, 24] may be addresses as multi-particle potentials. They may be implemented in the simulation of solid structures as well as the bio and fluidic fields. However, the solid structures are
KorayemandSadeghzadeh

231
where [ ]eM uu , [ ]eK uu , e
K φ u , qeF , e
K φφ ,
eFφ , [ ]eCuu ,and eq arerespectively,theelement’smass matrix, stiffness matrix, electromechanicalcoupling hardness matrix, mechanical load,dielectric hardness matrix, electric force vector,structuraldampingmatrix,andthevectorofchangeofdegreesoffreedomintheconsideredsystem.In MD, a well defined potential function( )1 2, , , NU r r r… expresses the manner of
dependency of the potential energy of a systemconsisting of N atomswith the space coordinates
1 2, , , Nr r r… .Theequationofmotionofallatomsmodelcanbeexpressedas
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
integrated piezoelectric sensors and actuators, and subjected to mechanical, electrical, and thermal loadings [18].
In 2008, Zia et al. [19] have presented a finite element formulation for the vibrations of layered piezoceramic plates, which accounts for the effects of hysteretic behavior. The hysteretic behavior has been simulated in the dielectric domain by using the finite element method and applying the Ishlinskii's model. In 2008, Balamurugan and Narayanan [20] have used a nine-noded piezolaminated degenerated shell element in order to model and analyze multi-layered composite shell structures together with sensors and piezoelectric actuators.
The coordinates of any arbitrary parameter, at any arbitrary point can be expressed by the use of nodal coordinates and isoparametric shape functions in the following way
1( , , ) ( )
Q
i ii
X
P P (1)
Where P is the noted parameter, is the isoparametric functions, Q is number of
nodes of the considered element, and X is the position of the nodes. By using the kinetic, potential and external energies and writing the minimum energy principle, the equations of motion for the finite element system can be presented as:
1 1e e e qe ee e e e
M q C q K K K K q F K K F uu uu uu u u u (2)
where eM uu , eK uu , e
K u , q eF , e
K , eF , eC uu , and eq are respectively, the
element's mass matrix, stiffness matrix, electromechanical coupling hardness matrix, mechanical load, dielectric hardness matrix, electric force vector, structural damping matrix, and the vector of change of degrees of freedom in the considered system.
In MD, a well defined potential function 1 2, , , NU r r r expresses the manner of
dependency of the potential energy of a system consisting of N atoms with the space coordinates 1 2, , , Nr r r . The equation of motion of all atoms model can be expressed as
i i i im =-r U+F (3)
Where, m and F are the mass of atoms and external (boundary) forces. The Finite Difference Method (FDM) is the usual approach for solving the differential equations of motion. FDM includes various approaches for analyzing the problem. Verlet and Velocity Verlet algorithms are the most famous methods. These algorithms are combination of the forward and backward Taylor expansions [21].
In addition to the Lenard Jones potential as a famous one, the Embedded Atom Potential (EAM), Finnis-Sinclair potential [22] and Sutton-Chen potential [23, 24] may be addresses as multi-particle potentials. They may be implemented in the simulation of solid structures as well as the bio and fluidic fields. However, the solid structures are
(3)
Where,mandFarethemassofatomsandexternal(boundary) forces. The Finite DifferenceMethod(FDM) is the usual approach for solving the
differential equations of motion. FDM includesvarious approaches for analyzing the problem.VerletandVelocityVerletalgorithmsarethemostfamousmethods.Thesealgorithmsarecombinationof the forward and backward Taylor expansions[21].In addition to the Lenard Jones potential as afamousone,theEmbeddedAtomPotential(EAM),Finnis-Sinclair potential [22] and Sutton-Chenpotential [23, 24] may be addresses as multi-particle potentials. They may be implemented inthesimulationofsolidstructuresaswellasthebioandfluidicfields.However,thesolidstructuresareespecialnanofieldsthatmentionedpotentialshouldbe improved for better results. The Rafii-Tabar-Suttonmulti-body long-range potential is used inthecurrentstudywhichisanextendedandimprovedformofSutton-Chenpotentialwith the capabilityofmodelingtheunlikematerial’sinteractions.ThegeneralformofRafii-Tabar-Sutton(RTS)potentialforbinaryA-Bunlikematerialsis[23,24]:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
especial nano fields that mentioned potential should be improved for better results. The Rafii-Tabar-Sutton multi-body long-range potential is used in the current study which is an extended and improved form of Sutton-Chen potential with the capability of modeling the unlike material's interactions. The general form of Rafii-Tabar-Sutton (RTS) potential for binary A-B unlike materials is [23 , 24]:
RTS AA A BB BI ij i i i i
i j¹i i i
1 ˆ ˆH = V r -d p ρ -d (1-p ) ρ2
With
AA BB ABij i j ij i j ij i j j i ijˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆV r =p p V r + 1-p 1-p V r + p 1-p +p 1-p V r
A A AA ABi ij j ij j ij
j i j i
ˆ ˆρ = Φ r = p Φ r + 1-p Φ r
B B BB ABi ij j ij j ij
j i j i
ˆ ˆρ = Φ r = 1-p Φ r +p Φ r
Where ˆip is the site occupancy operator and defined as:
i
1 if site i is occupied by an A atomp =
0 if site i is occupied by an B atom
The functions xyV (r) and xyΦ (r) are defined as
xyxyxy xy naV r =ε [ ]r
xyxyxy mar =[ ]rΦ
And the constants are defined by
AA AA AAd =ε C BB BB BBd =ε C
1 ( )2
AB AA BBm m m AB AA BB1n = (n +n )2
AB AA BBa = a a AB AA BBε = ε ε
Where is a parameter with the dimensions of energy, 'a' is a parameter with the dimensions of length and is normally taken to be the equilibrium lattice constant, 'm' and 'n' are positive constants with n>m. This potential has the advantage that all the parameters can be easily obtained from the Sutton-Chen elemental parameters of metals [24].
InternationalJournalofNanoscienceandNanotechnology

232
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
especial nano fields that mentioned potential should be improved for better results. The Rafii-Tabar-Sutton multi-body long-range potential is used in the current study which is an extended and improved form of Sutton-Chen potential with the capability of modeling the unlike material's interactions. The general form of Rafii-Tabar-Sutton (RTS) potential for binary A-B unlike materials is [23 , 24]:
RTS AA A BB BI ij i i i i
i j¹i i i
1 ˆ ˆH = V r -d p ρ -d (1-p ) ρ2
With
AA BB ABij i j ij i j ij i j j i ijˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆV r =p p V r + 1-p 1-p V r + p 1-p +p 1-p V r
A A AA ABi ij j ij j ij
j i j i
ˆ ˆρ = Φ r = p Φ r + 1-p Φ r
B B BB ABi ij j ij j ij
j i j i
ˆ ˆρ = Φ r = 1-p Φ r +p Φ r
Where ˆip is the site occupancy operator and defined as:
i
1 if site i is occupied by an A atomp =
0 if site i is occupied by an B atom
The functions xyV (r) and xyΦ (r) are defined as
xyxyxy xy naV r =ε [ ]r
xyxyxy mar =[ ]rΦ
And the constants are defined by
AA AA AAd =ε C BB BB BBd =ε C
1 ( )2
AB AA BBm m m AB AA BB1n = (n +n )2
AB AA BBa = a a AB AA BBε = ε ε
Where is a parameter with the dimensions of energy, 'a' is a parameter with the dimensions of length and is normally taken to be the equilibrium lattice constant, 'm' and 'n' are positive constants with n>m. This potential has the advantage that all the parameters can be easily obtained from the Sutton-Chen elemental parameters of metals [24].
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
especial nano fields that mentioned potential should be improved for better results. The Rafii-Tabar-Sutton multi-body long-range potential is used in the current study which is an extended and improved form of Sutton-Chen potential with the capability of modeling the unlike material's interactions. The general form of Rafii-Tabar-Sutton (RTS) potential for binary A-B unlike materials is [23 , 24]:
RTS AA A BB BI ij i i i i
i j¹i i i
1 ˆ ˆH = V r -d p ρ -d (1-p ) ρ2
With
AA BB ABij i j ij i j ij i j j i ijˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆV r =p p V r + 1-p 1-p V r + p 1-p +p 1-p V r
A A AA ABi ij j ij j ij
j i j i
ˆ ˆρ = Φ r = p Φ r + 1-p Φ r
B B BB ABi ij j ij j ij
j i j i
ˆ ˆρ = Φ r = 1-p Φ r +p Φ r
Where ˆip is the site occupancy operator and defined as:
i
1 if site i is occupied by an A atomp =
0 if site i is occupied by an B atom
The functions xyV (r) and xyΦ (r) are defined as
xyxyxy xy naV r =ε [ ]r
xyxyxy mar =[ ]rΦ
And the constants are defined by
AA AA AAd =ε C BB BB BBd =ε C
1 ( )2
AB AA BBm m m AB AA BB1n = (n +n )2
AB AA BBa = a a AB AA BBε = ε ε
Where is a parameter with the dimensions of energy, 'a' is a parameter with the dimensions of length and is normally taken to be the equilibrium lattice constant, 'm' and 'n' are positive constants with n>m. This potential has the advantage that all the parameters can be easily obtained from the Sutton-Chen elemental parameters of metals [24].
(11)
Where ε is a parameterwith the dimensions ofenergy,‘a’isaparameterwiththedimensionsoflengthandisnormallytakentobetheequilibriumlatticeconstant,‘m’and‘n’arepositiveconstantswithn>m.Thispotentialhas theadvantage thatall the parameters can be easily obtained fromtheSutton-Chenelementalparametersofmetals[24].Ina lotof existentmechanical systems, the smallfieldincludesalargeareawithrespecttotheatomicdimensions. For instance, in nanorobotic devices,thenanofiledincludessomenanoandsomemicroparts. So, MD could not cover the simulation ofnanofieldalone,yetMDmaybemodifiedtoapplyinlargersizes(withlimitationsintheaspectratio).Clustering the all atomMD model into a coarsegrained site model, named Coarse Grained MD(CGMD),isasimpleandeffectivemethodforthispurpose.
3.COARSE-GRAINEDMOLECULARDYNAMICS
Electromechanical processes normally occur onthe order of nano, micro, milli, and even severalseconds. In addition, they have higher-than-nanodimensions. Therefore, their real dimensions andtimerangescannotbedeterminedthroughtheuseof molecular dynamics method. However, by theuse of “coarse graining”, larger dimensions, inlongertimerangescouldbemodeled.Now, since a remarkablemethod by the name ofCoarse-GrainedMolecularDynamics(CGMD)hasbeenpresentedforthispurpose,whileusingithere,a general description is also provided regardingthisapproach.TheCGMDmethodisbasedonthenotionthat,ifinsteadofoneatom,alargernumberofatomsaretakenasaunit,then,alargervolumeofmaterial and alsomore simulation time canbeconsidered. Even by utilizing the world’s largest
andmostadvancedsupercomputers,themoleculardynamicssimulationscannotbeperformedformorethan several microseconds. Various approacheshavebeenpresented for theCGMDmethods [21-23].Theonlycrucial issueinthesemodelswillbethemanner of predicting and estimating the system’spotential.Achievingagoodpotentialforthesystemcan be guaranteed through a dimension analysis,andbycomparingtheRadialDistributionFunction(RDF)of the systemwithobtainedCGMDin theNF process; although, other ways also exist forthis achievement. If, on the average, the nominalmass and distance of atoms are on the order of' 'cm and ' 'cL ,andthenominalmassanddistanceoftheCGNFsamplesareontheorderof‘m’ and‘L’, respectively, the following relations could beconsideredforthetimestepsthatareused:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
In a lot of existent mechanical systems, the small field includes a large area with respected to the atomic dimensions. For instance, in nanorobotic devices, the nano filed includes some nano and some micro parts. So, MD could not cover the simulation of nano field alone, yet MD may be modified to apply in larger sizes (with limitations in the aspect ratio). Clustering the all atom MD model into a coarse grained site model, named Coarse Grained MD (CGMD), is a simple and effective method for this purpose.
4-Coarse-grainedmoleculardynamicsElectromechanical processes normally occur on the order of nano, micro, milli, and even several seconds. In addition, they have higher-than-nano dimensions. Therefore, their real dimensions and time ranges cannot be determined through the use of molecular dynamics method. However, by the use of "coarse graining", larger dimensions, in longer time ranges could be modeled. Now, since a remarkable method by the name of Coarse-Grained Molecular Dynamics (CGMD) has been presented for this purpose, while using it here, a general description is also provided regarding this approach. The CGMD method is based on the notion that, if instead of one atom, a larger number of atoms are taken as a unit, then, a larger volume of material and also more simulation time can be considered. Even by utilizing the world's largest and most advanced supercomputers, the molecular dynamics simulations cannot be performed for more than several microseconds. Various approaches have been presented for the CGMD methods [21-23]. The only crucial issue in these models will be the manner of predicting and estimating the system's potential. Achieving a good potential for the system can be guaranteed through a dimension analysis, and by comparing the Radial Distribution Function (RDF) of the system with obtained CGMD in the NF process; although, other ways also exist for this achievement. If, on the average, the nominal mass and distance of atoms are on the order of ' 'cm and ' 'cL , and the nominal mass and distance of the CGNF samples are on the order of 'm' and 'L', respectively, the following relations could be considered for the time steps that are used:
max MD
mΔt ~LkT
and cmax cCGMD
mΔt ~LkT
(12)
We developed a new CGMD approach and validated it with proper results [25]. It has been utilized in this paper for the NF.
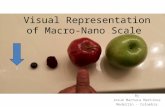
5-Macro-microcouplingmodelTo generalize the problem, the macro-nano-related problems are divided into two groups of closed and open systems. The group of problems, where all the side boundaries of the nano domain overlap the interfacial degrees of freedom, are called "closed systems"; and the group of problems, where the side boundaries of the nano region, in addition to the interfacial degrees of freedom, possess limited (and in some cases, unlimited) degrees of freedom, are called "open systems". Figures 1 and 2 illustrate the general cases of the closed and open systems, respectively. In the closed
(12)
WedevelopedanewCGMDapproachandvalidateditwithproperresults[25,26].Ithasbeenutilizedinthis paper for the NF.
4.MACRO-MICROCOUPLINGMODEL
Togeneralizetheproblem,themacro-nano-relatedproblemsaredividedintotwogroupsofclosedandopen systems. The group of problems, where allthesideboundariesofthenanodomainoverlaptheinterfacial degrees of freedom, are called “closedsystems”; and the group of problems, where thesideboundariesof thenano region, inaddition totheinterfacialdegreesoffreedom,possesslimited(andinsomecases,unlimited)degreesoffreedom,arecalled“opensystems”.Figures1and2illustratethegeneralcasesof theclosedandopensystems,respectively.Intheclosedsystem,usuallyonenanofieldandonemacrofieldexist.Forexample,inthecrackpropagationproblem,thefineregionofcrackpropagation is designated as the nano field, andthecoarseregioninwhichthecrackisgrowingisdesignatedasthemacrofield.Intheopensystem,several macro fields could be interacting withseveral nano fields. If the numbers ofmacro andnanofieldsareequaltoMandN,respectively,and
KorayemandSadeghzadeh

233
theareaofeachfieldisindicatedbyΩ , then for the closedsystem,wecanwrite:
, ,
, ,
, ,
i j
i j
i j
i j NFor i j MF
i NF j MF
Ω ∩Ω =∅ ∈Ω ∩Ω =∏ ∅ ∈Ω ∩Ω ≠∅ ∈ ∈
(13)
Andfortheopensystem:
, ,
, ,
, ,
i j
i j
i j
or i j NFor i j MFor i NF j MF
Ω ∩Ω =∏ ∅ ∈Ω ∩Ω =∏ ∅ ∈Ω ∩Ω =∏ ∅ ∈ ∈
(14)
In the above relations, ∅ and ∏ denote theempty and non-empty spaces, respectively. Withthisnotation, it canbe easilyproved (consideringthe presented definitions) that a closed system isaspecialcaseofanopensystem.Therefore,inanopensystem,theremaybemorethanonenanofieldandeachofthenanofieldsmaybeincontactwithoneanotherindifferentways.Thesecontacts(forexampleinthenanomanipulationprocess using nanorobots) may not occur duringacertaintimerange,andafter thatduration, thesecontactsmaybeestablished.Exclusivelymechanicalsystemsare taken intoaccount, and therefore, thementioned contacts are of the second order only,andvolumetricsharingisnotconsidered.
Figure1: General case definition of closed mechanical systems
Figure2: General case definition of open mechanical systems
The concept ofmulti-scale couplingmethods canbeveryusefulincaseswherewewanttomodelarelatively large region of thematerial in order tostudy thewholedeformationfield,but the atomicand sub-atomic scales areneededonly in specificandlimitedregions.Apracticalexampleofaclosedsystemcanbedemonstratedinthemodelingofcracknucleation and propagation. As was mentionedbefore,forsuchproblems,variousworkshavebeenpresented.Thepresentmodelhasaspecialapplicationinopensystems; systems where practically no interfacemay even exist between the macro and nanoenvironmentsinsomecasesandinacertainrangeofwork,whileafteracertaintimeduration(whichcould be knownor unknown), a relationshipmayformbetweenthesetwoenvironments.Throughtheuse of coupling models for closed environments,the size limitation of atomic modeling couldbe minimized, such that an inner region (withcomplexdynamicprocessesandlargedeformationgradients)couldexist insideanouterregion(withsmall deformation gradients). It is not like thisin open systems,where the effect of sizewill beconsiderable. To demonstrate the effectivenessof themodel, in this article, the special case of aconicregionforNFhasbeeninvestigated.Also,intheMFmodel, an elasticbeamwithpiezoelectricpropertieshasbeenconsidered.
4.1.CouplingofMFandNFFor the coupling of MF and NF in closed
InternationalJournalofNanoscienceandNanotechnology

234
systems, fourregionsareconsidered throughoutthesystemshowninFigure3.Thesefourregions,in the order of proceeding frommicro to nanoenvironments, consist of: Macro Field (MF),UnfoldedVolume(UV),InterfacialVolume(IV),andNanoField(NF).TheIVregionis infactaregionwhere the terminalatomsofaNFmodelhavesurroundedaMFnodeinthemodel.TheIUregionistheregionbetweentheendnodesofMFandtheendoftheNFmodel.ThetworegionsofMFandNFneednofurtherexplanation.Inviewof the presented cases, IVs estimate the meandisplacementsofNFinthecenterofmassofthesedisplacements. These averages are later usedas the initial conditions of displacements in therelevantinterfacialnodes.Itshouldbementionedthat,theIVneednotmatchthemacroelementthatsurrounds it,with respect to thesizeandshape.Normally, a macro element, in the interfacial section, consists of hundreds to thousands ofatoms. By taking an effective average for theatomic points, the discreteness of the atomicstructurecanbesufficientlyhomogenizedsothattheMFregionrespondstotheexcitationsoftheatomicregionasanexpandedvolumeofitself.
Figure3: Common region between NF and MF in the closed system
Fortheanalysisofopensystems,inadditiontothefour regions ofMF,UV, IV, andNF, two regionsofFreeBoundariesofnanofield(denotedbyFB)
Figure4:Common region between NF and MF in the open system
KorayemandSadeghzadeh

235
and Common Boundaries of nano field (denotedbyCB)arealsodefined(Figure4).Regardlessofthetypeofinitialstatethesetworegionsmayhave,eachonehas thepotentialofundergoingdifferentchanges during the analysis time range. The CBregion is usually circumscribed around a circularzone,becauseinsmalldimensions,forconsideringtheforceswhichinthiszoneareaccountedamongdifferentsectionsofthenanofield,theconceptof“cutoffradius”isused.Moreover, theMFregionis also divided into four sections of “free far-fields”, “internal volume”, “boundary field”, and“interfacialfield”.ItseemsnecessaryheretodescribethemethodofanalysisoftheFBandCBregions.InorderfortheFB region to behave freely (at surface), changesshouldbemadetothemodel.Thisisthephilosophybehind the establishment of the FB region. Theexistenceof free surface createsunwanted effectsin the NF system. Incomparisonwiththecasesinwhichtheboundaryis affected by an external load, this occurrencein FB is not so critical. In addition to unwantedeffects, since atoms at the free surface or close to itdon’thaveacompletesetofneighboringatoms,the coordination between the atoms falls apart.To remedy this lackofcoordination,and tomakethe atoms stable in the interfacialNF region, twoapproaches can be adopted. The first approach istoofferanadditionalvolumeofatomsawayfromthecenter,whichformsthesurfaceNFregion.Thesecond approach is to consider a number of thesameNFsystematomsasanunfoldedvolume.In case of using the first approach, although thesurface NF region eliminates the effects of the free surface, it applies an unwanted virtual stiffnessto the system, which elastically constrains thedeformationoftheinnerNFregion.Tocounteractthis effect, the unwanted virtual hardness shouldbe compensated. Since the effects of surface insolids are controllable, to a large extent, by theinnervolume,inthisarticle,itissuggestedtousethesecondapproach.Ofcourse,inplaceswherethelimitationofsizeexists(likethetipofacone-shapedregion),theuseofthefirstapproachisinevitable.During the simulation, the average of k numbersofIV,forobtainingthedisplacementofthecenterof mass is defined as ,
MDCM kδ
, which, to get thestatistical displacement vector ,
MDI kδ
, is averagedalongMtimerangesofNF:
( ), , , ,1
1 ( ) (0)M
MD MDI k CM k CM k j CM kTime
jr t r
Mδ δ
=
= = −∑
(15)
In theaboverelation, ,1
1( ) ( )kN
CM k j i jik
r t r tN =
= ∑ is
center of mass of the kth IV,whichhas kN atoms
in the position ir
at time jt of the jth NF time range. In open systems, in order for the NF region tobehave freely (at surface) or to be subjected tospecificexternalforces,somealterationsshouldbemade in themodel.This is thephilosophybehindtheestablishmentoftheUVregion.Inthebestcase,whenthefreemovementofthesurfaceisintended,theexistenceofthefreesurfaceproducesunwantedeffects in the NF system. This event, in cases where an external force isconsidered instead of the freemovement,will bemuchworse.Inadditiontounwantedeffects,sinceatomsatthefreesurfaceorclosetoitdon’thaveacompletesetofneighboringatomsaroundthem,thecoordinationbetweentheatomsfallsapart.To reduce this lack of coordination, and tomakethe atoms stable in the interfacial NF region, an additional volume of atoms far from the center,whichformsthesurfaceNFregion,isoffered.Onthe other hand, although the surface NF regioneliminates the effects of the free surface, it applies anunwantedvirtualstiffnesstothesystem,whichelasticallyconstrains thedeformationof the innerNF region. Due to the particular complexity ofthe problem, in this report, a simple, and at thesametime,effectiveprocedureispresentedforthecalculationofvirtualhardness.
4.2.AlgorithmforestablishmentofcouplingIn general, the coupling of MF and NF isaccomplished through schemes based on theestablishmentofiterativeequilibriumbetweenthesetworegions.Intheseschemes,theiterationsbeginwiththedisplacementsoftheMFandNFinterface.These displacements are obtained as statisticalaveragefromtheatomicpositionsofeveryIV,andby averaging in the time duration of NF. Theseaveragedisplacementsare thenapplied in theMFregion,asdisplacementboundaryconditions( Iδ
).
Then,theobtainedMFboundaryvalueproblemissolvedtoyieldthenewinterfacialreactionforces,
InternationalJournalofNanoscienceandNanotechnology

236
i.e. IR.Then,theseforcesareappliedtotheatoms
locatedinIVs;andso,thefixed-reactionboundaryconditions are defined in the NF system. Duringthe iterations inwhichMF is solved, the reactionboundaryconditionsarefixed,andtheyareappliedto the NF region to guarantee the correct application oftheelasticfieldfromtheMFdomain.Insolvingthe problems of statics, the iteration cycle of NF andMFcontinuesuntilthesystemreachesalastingequilibriumofdisplacementsandforcesbetweenthecontinuumandatomicfields.Whilefortheproblemsof dynamics, after the establishment of staticequilibrium(usingtheaforementionedmethod),thesystemshouldbedynamicallysolved(generallyvianumericalmethods).This issue constitutes one ofthesubstantialcomplexitiesofthepresentwork.Here, through a unique algorithm, the manner of analysis ofmechanical dynamic problemswill bepresented.ByconsideringthedynamicsintheMFmodel,dynamiccontinuumequationsinthenth MF step at time nt aregivenas:DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
( (t ), (t ), (t ),...)= t )n n n n E Þ Þ Þ R( (16)
where E is the term related to the equations extracted from the system's internal energy, which in different methods, are functions of (t )nÞ s (the studied variables of the system) and of different orders of their derivatives. Also, at different times, function
t )nR( is the function resulting from external loads applied to the system and proportionate to the orders of the system.
In problems that possess natural and forced boundary conditions and, at the same time, are supposed to be used in multi-scale coupling models, the degrees of freedom should be divided into several groups. The first group includes the degrees of freedom that are governed by the natural boundary conditions. This group will be designated by F. The free boundary condition is the most usual condition of this group. The second group includes the degrees of freedom that are governed by the forced boundary conditions. This group will be designated by B. In many problems related to dynamics of solids, the clamped boundary condition can be regarded as a forced boundary. Also, in the area of fluid dynamics, the no-slip conditions at the surface can be mentioned. The third group is the degrees of freedom that are included in the inner points of the domain. This group will be designated by V. The fourth group is the degrees of freedom that are supposed to be coupled with the common degrees of freedom in molecular dynamics. This group will be designated by I. The matrices related to the degrees of freedom of general equation (1) are reduced, based on these definitions. Therefore,E is broken down as [ ]E , in which , , , , .V F I B V indicates the internal MF region, F is the
far-field variables, I is the variables of the interface, and B is the variables of the MF boundary conditions. Using these definitions, the dynamic continuum equations in the nth step of MF at time nt are expressed as:
( (t ), (t ), (t ),...)= t ), , , ,n n n n V F I B f fE Þ Þ Þ R ( f (17)
It should be noted here that (t )nÞ includes all the degrees of freedom in every set of equations. The general state of a multi-scale problem includes the initial value and the external forces problems.
5-2-1InitialvalueproblemThe general equations of motion of the macro system's displacement, when no external forces exist, are as follows:
( (t ), (t ), (t ),...)=0n n n E Þ Þ Þ (18)
In any case, whether the problem pertains to the subject of solids or fluid dynamics, the general dynamic displacement vector could be expressed as follows:
(t)= t) t) Þ u( g( (19)
(16)
whereE isthetermrelatedtotheequationsextractedfromthesystem’sinternalenergy,whichindifferentmethods, are functions of (t )nÞ s (the studiedvariablesof thesystem)andofdifferentordersoftheirderivatives.Also, at different times, function
t )nR( is the function resulting fromexternalloadsappliedtothesystemandproportionatetotheordersof the system.Inproblemsthatpossessnaturalandforcedboundaryconditionsand,atthesametime,aresupposedtobeusedinmulti-scalecouplingmodels,thedegreesoffreedomshouldbedividedintoseveralgroups.Thefirstgroupincludesthedegreesoffreedomthataregovernedbythenaturalboundaryconditions.Thisgroupwill bedesignatedbyF.The freeboundaryconditionisthemostusualconditionofthisgroup.Thesecondgroupincludesthedegreesoffreedomthataregovernedbytheforcedboundaryconditions.This group will be designated by B. In manyproblemsrelatedtodynamicsofsolids,theclampedboundary condition can be regarded as a forcedboundary.Also, in the areaoffluiddynamics, theno-slipconditionsatthesurfacecanbementioned.Thethirdgroupis thedegreesoffreedomthatareincludedintheinnerpointsofthedomain.This group will be designated by V. The fourth
groupisthedegreesoffreedomthataresupposedtobecoupledwiththecommondegreesoffreedominmoleculardynamics.ThisgroupwillbedesignatedbyI.Thematricesrelatedtothedegreesoffreedomofgeneralequation(1)arereduced,basedonthesedefinitions.Therefore,E is broken down as [ ]αβE , in which
, , , , .=V F I Bα β V indicates the internal MFregion,Fisthefar-fieldvariables,Iisthevariablesof the interface, andB is thevariables of theMFboundary conditions. Using these definitions, thedynamiccontinuumequationsinthenth step of MF at time nt areexpressedas:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
( (t ), (t ), (t ),...)= t )n n n n E Þ Þ Þ R( (16)
where E is the term related to the equations extracted from the system's internal energy, which in different methods, are functions of (t )nÞ s (the studied variables of the system) and of different orders of their derivatives. Also, at different times, function
t )nR( is the function resulting from external loads applied to the system and proportionate to the orders of the system.
In problems that possess natural and forced boundary conditions and, at the same time, are supposed to be used in multi-scale coupling models, the degrees of freedom should be divided into several groups. The first group includes the degrees of freedom that are governed by the natural boundary conditions. This group will be designated by F. The free boundary condition is the most usual condition of this group. The second group includes the degrees of freedom that are governed by the forced boundary conditions. This group will be designated by B. In many problems related to dynamics of solids, the clamped boundary condition can be regarded as a forced boundary. Also, in the area of fluid dynamics, the no-slip conditions at the surface can be mentioned. The third group is the degrees of freedom that are included in the inner points of the domain. This group will be designated by V. The fourth group is the degrees of freedom that are supposed to be coupled with the common degrees of freedom in molecular dynamics. This group will be designated by I. The matrices related to the degrees of freedom of general equation (1) are reduced, based on these definitions. Therefore,E is broken down as [ ]E , in which , , , , .V F I B V indicates the internal MF region, F is the
far-field variables, I is the variables of the interface, and B is the variables of the MF boundary conditions. Using these definitions, the dynamic continuum equations in the nth step of MF at time nt are expressed as:
( (t ), (t ), (t ),...)= t ), , , ,n n n n V F I B f fE Þ Þ Þ R ( f (17)
It should be noted here that (t )nÞ includes all the degrees of freedom in every set of equations. The general state of a multi-scale problem includes the initial value and the external forces problems.
5-2-1InitialvalueproblemThe general equations of motion of the macro system's displacement, when no external forces exist, are as follows:
( (t ), (t ), (t ),...)=0n n n E Þ Þ Þ (18)
In any case, whether the problem pertains to the subject of solids or fluid dynamics, the general dynamic displacement vector could be expressed as follows:
(t)= t) t) Þ u( g( (19)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
( (t ), (t ), (t ),...)= t )n n n n E Þ Þ Þ R( (16)
where E is the term related to the equations extracted from the system's internal energy, which in different methods, are functions of (t )nÞ s (the studied variables of the system) and of different orders of their derivatives. Also, at different times, function
t )nR( is the function resulting from external loads applied to the system and proportionate to the orders of the system.
In problems that possess natural and forced boundary conditions and, at the same time, are supposed to be used in multi-scale coupling models, the degrees of freedom should be divided into several groups. The first group includes the degrees of freedom that are governed by the natural boundary conditions. This group will be designated by F. The free boundary condition is the most usual condition of this group. The second group includes the degrees of freedom that are governed by the forced boundary conditions. This group will be designated by B. In many problems related to dynamics of solids, the clamped boundary condition can be regarded as a forced boundary. Also, in the area of fluid dynamics, the no-slip conditions at the surface can be mentioned. The third group is the degrees of freedom that are included in the inner points of the domain. This group will be designated by V. The fourth group is the degrees of freedom that are supposed to be coupled with the common degrees of freedom in molecular dynamics. This group will be designated by I. The matrices related to the degrees of freedom of general equation (1) are reduced, based on these definitions. Therefore,E is broken down as [ ]E , in which , , , , .V F I B V indicates the internal MF region, F is the
far-field variables, I is the variables of the interface, and B is the variables of the MF boundary conditions. Using these definitions, the dynamic continuum equations in the nth step of MF at time nt are expressed as:
( (t ), (t ), (t ),...)= t ), , , ,n n n n V F I B f fE Þ Þ Þ R ( f (17)
It should be noted here that (t )nÞ includes all the degrees of freedom in every set of equations. The general state of a multi-scale problem includes the initial value and the external forces problems.
5-2-1InitialvalueproblemThe general equations of motion of the macro system's displacement, when no external forces exist, are as follows:
( (t ), (t ), (t ),...)=0n n n E Þ Þ Þ (18)
In any case, whether the problem pertains to the subject of solids or fluid dynamics, the general dynamic displacement vector could be expressed as follows:
(t)= t) t) Þ u( g( (19)
(17)
It shouldbenotedhere that (t )nÞ includesall thedegreesof freedom inevery setofequations.Thegeneralstateofamulti-scaleproblemincludestheinitialvalueandtheexternalforcesproblems.
4.2.1. Initial value problemThe general equations of motion of the macrosystem’s displacement, when no external forcesexist,areasfollows:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
( (t ), (t ), (t ),...)= t )n n n n E Þ Þ Þ R( (16)
where E is the term related to the equations extracted from the system's internal energy, which in different methods, are functions of (t )nÞ s (the studied variables of the system) and of different orders of their derivatives. Also, at different times, function
t )nR( is the function resulting from external loads applied to the system and proportionate to the orders of the system.
In problems that possess natural and forced boundary conditions and, at the same time, are supposed to be used in multi-scale coupling models, the degrees of freedom should be divided into several groups. The first group includes the degrees of freedom that are governed by the natural boundary conditions. This group will be designated by F. The free boundary condition is the most usual condition of this group. The second group includes the degrees of freedom that are governed by the forced boundary conditions. This group will be designated by B. In many problems related to dynamics of solids, the clamped boundary condition can be regarded as a forced boundary. Also, in the area of fluid dynamics, the no-slip conditions at the surface can be mentioned. The third group is the degrees of freedom that are included in the inner points of the domain. This group will be designated by V. The fourth group is the degrees of freedom that are supposed to be coupled with the common degrees of freedom in molecular dynamics. This group will be designated by I. The matrices related to the degrees of freedom of general equation (1) are reduced, based on these definitions. Therefore,E is broken down as [ ]E , in which , , , , .V F I B V indicates the internal MF region, F is the
far-field variables, I is the variables of the interface, and B is the variables of the MF boundary conditions. Using these definitions, the dynamic continuum equations in the nth step of MF at time nt are expressed as:
( (t ), (t ), (t ),...)= t ), , , ,n n n n V F I B f fE Þ Þ Þ R ( f (17)
It should be noted here that (t )nÞ includes all the degrees of freedom in every set of equations. The general state of a multi-scale problem includes the initial value and the external forces problems.
5-2-1InitialvalueproblemThe general equations of motion of the macro system's displacement, when no external forces exist, are as follows:
( (t ), (t ), (t ),...)=0n n n E Þ Þ Þ (18)
In any case, whether the problem pertains to the subject of solids or fluid dynamics, the general dynamic displacement vector could be expressed as follows:
(t)= t) t) Þ u( g( (19)
(18)
In any case, whether the problem pertains to thesubject of solids or fluid dynamics, the generaldynamicdisplacementvectorcouldbeexpressedasfollows:
(t)= t) t)+Þ u( g( (19)
where t) g( and t)u( arethevectorofinitialdegreesof freedom and the elastic vector of the wholesystem, respectively. By substituting the generaldynamic displacement vector in the equation ofmotion,andusingtheprincipleofsuperposition,wehave:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
(20)Andthus,theinitialvalueproblemisconvertedintotheexternalforceproblem.If theeffectsofordershigher than the second derivative of the degreesof freedomare disregarded, and the effects of the
KorayemandSadeghzadeh

237
consideredordersareassumedaslinear(likemanycommon methods, including the finite element),thentheequationscanberewrittenasfollows:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
(21)
Byarrangingthetotaldisplacementvector,thestate
formoftheequationscanbeexpressedas:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
(22)
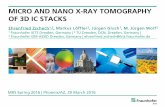
Figue5: Dynamic analysis algorithm of MF and NF coupling
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
Figure 5. Dynamic analysis algorithm of MF and NF coupling
In the common boundaries of the NF region, some magnitude of force, which arises from the forces of atoms inside the cut-off radius of the contact surface of two NF fields, should be considered. It should be mentioned that, except in the areas of direct contact between surfaces (where the effect of friction is modeled with the inclusion of some impacts), in the above equations, the viscous friction force D
if is uniformly applied to the atoms inside the IVs and UVs. Throughout the integration of the above equations for a period of MΔt =MΔt (where M is the number of time steps and Δt is the time step duration), the new average displacements are determined by equation (1). The new atomic displacements for the next MF step at time n+1 n Mt =t +Δt are again applied in equations (6) and (7a) for the calculation of forces in the next iteration step. The complete algorithm for the simulation of coupling has been given in Figure 5.
Definition of the initial state of MF and NF models Displacements V 0 F 0 B 0 I 0(t ) , (t ) , (t ) , (t )
Velocities V 0 F 0 B 0 I 0(t ) , (t ) , (t ) , (t )
Solution of MF
Simulation of NF using M time steps
m nt t m t, m 1.....M
Calculation of additional forces for different volumes cuv m Auv m cf m c mf (t ) , f (t ) , f (t ) , f (t )
Verlet Algorithm
m=m+1 m=M?
Calculation of new interfacial displacements at n 1 nt t M t
M
MD MDI CM CM j CMt j 1
1 r (t ) r (0)M
Yes No
State equation: R QF
I n I n n nR ( E Þ Þ Þ
Calculation and adjustment of interfacial
changes I I new
I I new
Calculation and adjustment of macro changes
V F B
V F B new
V F B
V F B new
, , , ,
, ,
, ,
Solution with Runge Kutta
InternationalJournalofNanoscienceandNanotechnology

238
in which,
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
is thestatevectorandthe KE , DE ,and AE matrices aretheresolvedzerotosecondorder termsof thegeneral equation of motion. The solution of unknown elastic displacementswithintheMFregion,i.e. , , , V F B Iu u u u , can be obtainedbysolvingtheabovestateequationandbyapplyingtheinitialconditionIC=0inthefirststep,andapplyingtheconditionIC=ICi in the ith step of themacrosolution.Then,theinterfacialforcesareobtainedthroughthefollowingrelations:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
(23)
Thedynamicsof theatomiwithmassm(i), at the position r(i), and in the NF regions are describedthrough theNewton’s equations ofmotion.Thus,for different regions belonging to the generalNFwehave:
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
where t) g( and t)u( are the vector of initial degrees of freedom and the elastic vector of the whole system, respectively. By substituting the general dynamic displacement vector in the equation of motion, and using the principle of superposition, we have:
( (t ), (t ), (t ),...)= ( (t ), (t ), (t ),...)n n n n n n E u u u E g g g (20)And thus, the initial value problem is converted into the external force problem. If the effects of orders higher than the second derivative of the degrees of freedom are disregarded, and the effects of the considered orders are assumed as linear (like many common methods, including the finite element), then the equations can be rewritten as follows:
( (t ))+ ( (t ))+ (t ))= ( (t )) ( (t )) (t ))K n D n A n K n D n A n E u E u E (u E g E g E (g (21)
By arranging the total displacement vector, the state form of the equations can be expressed as:
1 1 1
0 0( (t )) ( (t )) (t ))K n D n A n
A K A D A
Iddt
Q Q E g E g E (g
E E E E E (22)
in which, , , , , , , , TV F B I V F B I
Q u u u u u u u u is the state vector and the KE , DE , and
AE matrices are the resolved zero to second order terms of the general equation of motion.
The solution of unknown elastic displacements within the MF region, i.e. , , , V F B Iu u u u , can be obtained by solving the above state equation and by applying the initial condition IC=0 in the first step, and applying the condition IC=ICi in the ith step of the macro solution. Then, the interfacial forces are obtained through the following relations:
t ) ( (t ), (t ), (t ),...) I n I n n n R ( E Þ Þ Þ (23)The dynamics of the atom i with mass m(i), at the position r(i), and in the NF regions are described through the Newton's equations of motion. Thus, for different regions belonging to the general NF we have:
Di i i im r =f +f
In the inner NF region (24a)
kDI
i i i i i i ( ) ( )k first step it's last stepI
Rm r =f + +f , (r ,r ) = ( , )N i i
Þ Þ
Interfacial NF (for the kth IV) (24b)
(24a)
(24b)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
k kDcuv Auv
i i i ik kUV UV
f fm r =f + + +fN N
In the surface NF region (for the kth UV) (24c)
kDcf
i i i ikFB
fm r =f + +fN
In the free NF region (for the kth FB) (24d)
RCAtom
kc i Di=1
i i i ikCB
fm r =f + +f
N
In the common NF region (for the kth CB) (24e)
The atoms in the inner NF region only experience the atomic force i ijj
f = f
and the
frictional forces of Dif , which result from their neighboring atoms. The atoms existing
in the interfacial NF region (which belong to the kth IV) also experience an additional force ( k
IR
) which is distributed among kIN atoms. In addition, the continuity of the
fields of the zero- and first-order degrees of freedom should be guaranteed in it. The atoms existing in the surface NF region (which belong to the kth UV) also experience an opposing force ( k
cuvf
) which is distributed among kSN atoms. Moreover, they tolerate the
force of kAuvf
due to the crushing of the system, which itself should be divided by kSN atoms.
(24c)
InthesurfaceNFregion(forthekth UV)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
k kDcuv Auv
i i i ik kUV UV
f fm r =f + + +fN N
In the surface NF region (for the kth UV) (24c)
kDcf
i i i ikFB
fm r =f + +fN
In the free NF region (for the kth FB) (24d)
RCAtom
kc i Di=1
i i i ikCB
fm r =f + +f
N
In the common NF region (for the kth CB) (24e)
The atoms in the inner NF region only experience the atomic force i ijj
f = f
and the
frictional forces of Dif , which result from their neighboring atoms. The atoms existing
in the interfacial NF region (which belong to the kth IV) also experience an additional force ( k
IR
) which is distributed among kIN atoms. In addition, the continuity of the
fields of the zero- and first-order degrees of freedom should be guaranteed in it. The atoms existing in the surface NF region (which belong to the kth UV) also experience an opposing force ( k
cuvf
) which is distributed among kSN atoms. Moreover, they tolerate the
force of kAuvf
due to the crushing of the system, which itself should be divided by kSN atoms.
(24d)
InthefreeNFregion(forthekth FB)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
k kDcuv Auv
i i i ik kUV UV
f fm r =f + + +fN N
In the surface NF region (for the kth UV) (24c)
kDcf
i i i ikFB
fm r =f + +fN
In the free NF region (for the kth FB) (24d)
RCAtom
kc i Di=1
i i i ikCB
fm r =f + +f
N
In the common NF region (for the kth CB) (24e)
The atoms in the inner NF region only experience the atomic force i ijj
f = f
and the
frictional forces of Dif , which result from their neighboring atoms. The atoms existing
in the interfacial NF region (which belong to the kth IV) also experience an additional force ( k
IR
) which is distributed among kIN atoms. In addition, the continuity of the
fields of the zero- and first-order degrees of freedom should be guaranteed in it. The atoms existing in the surface NF region (which belong to the kth UV) also experience an opposing force ( k
cuvf
) which is distributed among kSN atoms. Moreover, they tolerate the
force of kAuvf
due to the crushing of the system, which itself should be divided by kSN atoms.
(24e)
InthecommonNFregion(forthekthCB)
TheatomsintheinnerNFregiononlyexperience
the atomic force andthefrictionalforcesofDif ,whichresultfromtheirneighboringatoms.TheatomsexistingintheinterfacialNFregion(which
belong to the kthIV)alsoexperienceanadditionalforce whichisdistributedamong k
IN atoms.Inaddition,thecontinuityofthefieldsofthezero-andfirst-orderdegreesoffreedomshouldbeguaranteedin it.Theatomsexisting in thesurfaceNFregion(which belong to the kth UV) also experience anopposing force whichisdistributedamong
kSN atoms. Moreover, they tolerate the force ofduetothecrushingofthesystem,whichitself
shouldbedividedby kSN atoms.
InthecommonboundariesoftheNFregion,somemagnitudeofforce,whicharisesfromtheforcesofatomsinsidethecut-offradiusofthecontactsurfaceoftwoNFfields,shouldbeconsidered.Itshouldbementionedthat,exceptintheareasofdirectcontactbetween surfaces (where the effect of friction ismodeled with the inclusion of some impacts), intheaboveequations,theviscousfrictionforce D
if is uniformly applied to the atoms inside the IVsandUVs.Throughouttheintegrationoftheaboveequationsforaperiodof (whereMisthenumberoftimestepsand isthetimestepduration),thenewaveragedisplacementsaredeterminedbyequation (1). The new atomic displacements forthenextMFstepattime are again appliedinequations(6)and(7a)forthecalculationof forces in the next iteration step.The completealgorithm for the simulation of coupling has been giveninFigure5.Inthefollowingsections,threeexamplesofsystemsin solid mechanics, which could be consideredas candidates for using the proposed method,are presented. The first example (as a sample ofa closed system) investigates the penny shapedcracks.Thesecondexample(asasampleofasemi-open system), follows up on the effects ofmacrodynamicsonthecracknucleationandpropagation.Also, the third example demonstrates a not-so-complete arrangement of the probe tip in a Scanning Probe Microscope (SPM).
5.EXAMPLESANDDISCUSSIONS
5.1.Pennyshapedcracks(closedsystem)Generally, the propagation or even nucleation ofmanycracksisduetocertainstructuresandbehaviors
KorayemandSadeghzadeh

239
in nanoscale and smaller. Dislocations inherentlyexistinmanysolidstatesystems,andinsomecases,theyemergeasaresultofcertainreactions.Theycangrowandtakeashapesimilartoapenny.Basically,themodelofapennyshapedcrackcanbeobtainedby eliminating one or several particles in atomicmodels. Here, by using the presented approach, aclosedsystemhasbeenconsidered,inwhichananofield is surrounded by the nodes of amacro field.Thenseveralparticlesareeliminatedfromthenanofield,sothatthebehaviorofthemacroandnanofieldscouldbeinvestigatedduetotheformationofcrack.Oneofthesignificantapplicationsofthisexampleistherecognitionofthecompletebehaviorofaclosedsystem as a result of changes occurring in the nano environment;itcanleadtothepredictionofeventsinthenanoenvironmentbyusingtheobservationsofthe macro parts.
Figure6:The penny shape crack (nano field is enlarged)
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
First, consider the extension problem due to a tension force. A force large enough is applied to the free end of the cantilever to deform the NF part. Deformations of the NF along the time have been shown in Figure 7. As can be observed, in a relatively long time, a series of initial deformations occurs in the NF. After the elapse of certain time, the deformations are considerably enlarged. Upon the yield point of the NF, deformations grow more and more.
t=0 ns t=1 ns t=1.2 ns
t=1.8 ns t=2.7 ns t=3.2 ns
t=3.7 ns t=4.1 ns t=4.7 ns Figure 7. Effect of applying tensile load on the penny shaped crack
Now, consider the problem of compression of the free end of the cantilever. A force large enough is applied to the free end of the cantilever to deform the NF. Deformations of the NF region have been illustrated in Figure 8. The behavior of this system is very similar to the previous case (although, in the reverse direction); with the difference that the processes take longer time because of the higher resistance of the system to compression. As the figure shows, in a relatively long time, a series of initial deformations occur in the NF.
Figure7:Effect of applying tensile load on the penny shaped crack
InternationalJournalofNanoscienceandNanotechnology

240
AsithasbeendepictedinFigure6,theconsideredsystem consists of an aluminum plate withdimensions of 1µ×1µ which is clamped at leftend, and a square-shaped part of its midsection(1nm1×nm) is considered as a nano environment.An elliptical crack with the large diameter about0.4nmandthesmalldiameterof0.05nmhasbeenconsideredinthecenterofthenanoenvironment.First, consider the extension problem due to atension force.A force large enough is applied tothe free end of the cantilever to deform the NFpart.Deformationsof theNFalong the timehavebeenshowninFigure7.Ascanbeobserved, inarelativelylongtime,aseriesofinitialdeformationsoccurs in theNF.After theelapseofcertain time,the deformations are considerably enlarged.UpontheyieldpointoftheNF,deformationsgrowmoreandmore.
Now,considertheproblemofcompressionofthefreeendofthecantilever.Aforcelargeenoughis applied to the free end of the cantilever todeform theNF.Deformationsof theNF regionhavebeen illustrated inFigure8.Thebehaviorof this system is very similar to the previouscase (although, in the reverse direction); withthedifferencethattheprocessestakelongertimebecause of the higher resistance of the system to compression.Asthefigureshows,inarelativelylongtime,aseriesofinitialdeformationsoccurin the NF.With a finer sketch, the small reshaping of platemaybeobserved.Figure9 shows thefiner sketchby enlarging the size of atoms in view for somesnapshotsofFigure8. It canbeobserved that thearea of hole is decreasing along the time and itmovedtorightandfinallyexitsfromtheendright.DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
t=0 ns t=1 ns t=1.4 ns t=2 ns
t=2.3 ns t=2.8 ns t=3.8 ns t=4 ns
t=4.3 ns t=4.6 ns t=5.1 ns t=5.8 ns Figure 8. Effect of applying compressive load on the penny shaped crack
With a finer sketch, the small reshape of plate may be observed. Figure 9 shows the finer sketch by enlarging the size of atoms in view for some snapshots of Figure 8. It can be observed that the area of hole is decreasing along the time and it moved to right and finally exits from the end right. This is due to the stiffness of macro scale model at the end left.
t=1.4 ns t=2.8 ns t=3.8 ns
t=4 ns t=4.3 ns t=4.6 ns Figure 9. The fine sketch of deformation in compression test
Figure8: Effect of applying compressive load on the penny shaped crack
KorayemandSadeghzadeh

241
Thisisduetothestiffnessofmacroscalemodelattheendleft.The third problem involves the behavior of thesystem due to the environment’s temperatureincreasing.Byusing theclassicalNVTalgorithm,system’s temperature has been increased. It hasbeenobservedthatbyapplyingtherelativelylargeamountsofheat,thecrackareaisreduced,butnoteliminated. However, it leans to move along therightdirection.
5.2.Macrodynamicseffectonthepropagationofcracks(semi-opensystem)Despitethefactthatinmanycases,thenucleationandpropagationofacrackbeginswithinanobject,therearealsomanycases inwhich thenucleationand propagation of crack is caused by a macroforce.Toshowthecapabilityandeffectivenessofthesuggestedmethodforsemi-openproblems,theprocessofnucleationandpropagationofcracksdue
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
t=0 ns t=1 ns t=1.4 ns t=2 ns
t=2.3 ns t=2.8 ns t=3.8 ns t=4 ns
t=4.3 ns t=4.6 ns t=5.1 ns t=5.8 ns Figure 8. Effect of applying compressive load on the penny shaped crack
With a finer sketch, the small reshape of plate may be observed. Figure 9 shows the finer sketch by enlarging the size of atoms in view for some snapshots of Figure 8. It can be observed that the area of hole is decreasing along the time and it moved to right and finally exits from the end right. This is due to the stiffness of macro scale model at the end left.
t=1.4 ns t=2.8 ns t=3.8 ns
t=4 ns t=4.3 ns t=4.6 ns Figure 9. The fine sketch of deformation in compression test Figure9: The fine sketch of deformation in compression test
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
The third problem involves the behavior of the system due to the environment's temperature increasing. By using the classical NVT algorithm, system's temperature has been increased. It has been observed that by applying the relatively large amounts of heat, the crack area is reduced, but not eliminated. However, it leans to move along the right direction.
t=0 ns t=1.2 ns t=1.6 ns t=1.9 ns
t=2.5 ns t=2.8 ns t=3.6 ns t=4 ns
Figure 10. Effect of applying thermal load on the dislocation
6-2-Macrodynamicseffectonthepropagationofcracks(semi-opensystem)Despite the fact that in many cases, the nucleation and propagation of a crack begins within an object, there are also many cases in which the nucleation and propagation of crack is caused by a macro force. To show the capability and effectiveness of the suggested method for semi-open problems, the process of nucleation and propagation of cracks due to an external load on the edge of a slotted plate is analyzed.
The considered system consists of an aluminum plate with dimensions of 1µ×1µ which is clamped at left end, and a square-shaped part of its midsection (1nm×1nm) is considered as a nano environment. The slot in the Figure 11 clearly shows the positions of the macro and nano fields.
Figure 11. Macro and nano fields in the case of nucleation and propagation of crack caused by the
application of mechanical load
Figure10: Effect of applying thermal load on the dislocation
InternationalJournalofNanoscienceandNanotechnology

242
toanexternalloadontheedgeofaslottedplateisanalyzed.The considered system consists of an aluminumplatewithdimensionsof1µ×1µwhichisclampedatleftend,andasquare-shapedpartofitsmidsection(1nm1×nm) is considered as a nano environment.TheslotintheFigure11clearlyshowsthepositionsofthemacroandnanofields.
Figure11:Macro and nano fields in the case of nucleation and propagation of crack caused by the
application of mechanical load
First,weexaminetheapplicationoftensileloadontheedgesofthemacroslot.ThedeformationofNFhas been illustrated in Figure 12.As it is shown,the NF system resists for a long time against the applicationoftheload,butiteventuallyyieldstotheloadanddeformsconsiderably.Whencompressiveload is applied and the edges have been closedto each other in the MF environment, althoughabsoluteyielddoesn’thappen,butvery small andlocalizeddislocationsareobservedintheformofarelativelyharmonicwave.
5.3.Dynamicmovementofananoobjectonthetipofacantileverprobe(opensystem)Inmanycases(likeincellmanipulationorimagingprocesses), it isnecessary tousearelatively largesurfacetodisplacetheenvironmentwhichholdthecellfromonelocationtoanother.Here,itisassumedthat, instead of a cell, wewant to investigate thebehavior of a very small solid metal object as aresultofthemovementofitsbase,byusingametalplate in larger dimensions.Assume a rectangularshape plate (like the two-dimensional case of acantilever,oranapproximationoftheconfigurationofanAFMprobetip),withthedimensionsgiveninthe Figure 14.
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
First, we examine the application of tensile load on the edges of the macro slot. The deformation of NF has been illustrated in Figure 12. As it is shown, the NF system resists for a long time against the application of the load, but it eventually yields to the load and deforms considerably. When compressive load is applied and the edges have been closed to each other in the MF environment, although absolute yield doesn't happen, but very small and localized dislocations are observed in the form of a relatively harmonic wave.
t=0 ns t=12 ns t=15.9 ns
t=21.8 ns t=28.5 ns t=29.3 ns Figure 12. Nano field in the case of nucleation and propagation of crack due to the application of
macro-mechanical load; tension problem
t=0 ns t=15.1 ns t=20 ns
t=31.5 ns t=36 ns t=41.2 ns Figure 13. Nano field in the case of nucleation and propagation of crack due to the application of
macro-mechanical load; compression problem
Figure12: Nano field in the case of nucleation and propagation of crack due to the application of macro-mechanical load; tension problem
KorayemandSadeghzadeh

243
Figure14: Dimensions and characteristics of the coupled system
Weconsiderasysteminnanodimensionsandwiththepropertiesofsiliconeasabody(particle)attachedtothiscantilever.Thecantileverisfixedatthetop,anditsbaseismovedwithaconstantvelocity.AsFigure15shows,themovementofthissystemisverysimilarto the movement of a rigid body. Considering theassumptionthatbothfieldsaremetallic,thisconclusionseems reasonable. Of course, to demonstrate theexistenceofconsiderableforceintheinterfaceofthetwofields,theRIforceshavebeenshowninhorizontalandverticaldirections,inFigure16.Nowassumethatananoobject,butwithbioorganiccharacteristics (which are often viscoelasticproperties),islocatedonthecantileverbeam.Foramorereasonableeffectofthemacroenvironmentonthenanoenvironment,themacro-cantileverisalsoassumedtobemadeofamoreflexiblematerial.AsFigure17shows,aflexibledeformationwilloccurinthenanofield.InFigure18,thediagramofthenormalizedaveragedisplacement of NF particles together with thenormalized displacement of the node adjacent toNFhasbeenplotted in theMFenvironment. It isobviousthatthemovementofNFisinthevicinityof thenodeadjacent toMF,and itonlyhas smalloscillatorymotionsaroundit.
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
First, we examine the application of tensile load on the edges of the macro slot. The deformation of NF has been illustrated in Figure 12. As it is shown, the NF system resists for a long time against the application of the load, but it eventually yields to the load and deforms considerably. When compressive load is applied and the edges have been closed to each other in the MF environment, although absolute yield doesn't happen, but very small and localized dislocations are observed in the form of a relatively harmonic wave.
t=0 ns t=12 ns t=15.9 ns
t=21.8 ns t=28.5 ns t=29.3 ns Figure 12. Nano field in the case of nucleation and propagation of crack due to the application of
macro-mechanical load; tension problem
t=0 ns t=15.1 ns t=20 ns
t=31.5 ns t=36 ns t=41.2 ns Figure 13. Nano field in the case of nucleation and propagation of crack due to the application of
macro-mechanical load; compression problem Figure13:Nano field in the case of nucleation and propagation of crack due to the application of macro-mechanical load; compression problem
InternationalJournalofNanoscienceandNanotechnology

244
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
Figure 15. Displacement of the MF and NF fields due to the displacement of the MF base in the x-
y plane; movement of a hard system
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05-1.5
-1
-0.5
0
0.5
1
Time (Second)
Nor
mal
ized
X fo
rces
Normalized force in node 34 along X directionforce in node 56 along X direction
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05-1.5
-1
-0.5
0
0.5
1
Time (Second)
Norm
aliz
ed Y
forc
es
Normalized force in node 34 along Y directionforce in node 56 along Y direction
Figure 16. Interfacial forces (RI) in horizontal and perpendicular directions for the movement of a metallic nano field on a metallic macro field
Now assume that a nano object, but with bioorganic characteristics (which are often viscoelastic properties), is located on the cantilever beam. For a more reasonable effect of the macro environment on the nano environment, the macro-cantilever is also assumed to be made of a more flexible material. As Figure 17 shows, a flexible deformation will occur in the nano field.
Figure16:Interfacial forces (RI) in horizontal and perpendicular directions for the movement of a metallic nano field on a metallic macro field
Figure15:Displacement of the MF and NF fields due to the displacement of the MF base in the x-y plane; movement of a hard system
6.CONCLUSION
Amethodhasbeenpresentedforthecouplingofthecontinuumandatomicscalestogether.Inthepresentmodel, the undesirable effects of free surfaces,commonsurfaces,andsurfacesclosetotheinterfacewiththemacrofieldhavebeenremoved,andafteroffering a practical and notable procedure for thedynamicsofsystemsingeneral,sevenproblems(inthe form of three examples) have been presentedto showcase the practicality, simplicity, and theeffectivenessofthismethod.
To generalize the issue, the macro/nano-relatedproblemsweredividedintotwogroupsofclosedand open systems. Then, the damped dynamicsofthesesystemsingeneralcaseswerepresented.Also, by using the presented approach, severalexamples of the closed, open, and semi-opencases were solved. The crack nucleation andpropagationduetothemacrodislocation(apennyshapedcrack)wasexplored.Themostimportantoutcome of this example is the considerableinfluence of dislocation on the propagation ofcrack.
KorayemandSadeghzadeh

245
As a case for a semi-open system, the process ofnucleation and propagation of cracks due to theapplication of an external load on the edge of aslottedplatewaspresented.Intheproblemdealingwiththeapplicationoftensileloadontheedgesofthe macro slot, the NF system resists for a long time againsttheapplicationoftheload,butiteventuallyyields to the load and undergoes deformation. Inaddition,asacaseofopensystem,twometallicandbioorganic nanorobotic systems were considered
via the attachment of an object (particle) to thecantileverprobe.Rigidityof thefirstcaseand theconsiderable flexibility of the second case weredemonstrated.Withrespecttotheobtainedresults,it was demonstrated that the presented methodcanbe applied for the simulationof systemswithconsiderable dimensions, and for relatively largetime ranges.The use of coarse-grainedmoleculardynamics (CGMD) in this method has made thiscapabilitypossible.Also, theuseoffiniteelement
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
1 2
3 4
5
6
7
8 9
10 11
12
13
14 15
16 17
18
19
20 21
22 23
24
25
26 27
28 29
30
31
32 33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
Figure 17. Displacement of the MF and NF fields due to the displacement of the MF base in the x-
y plane; movement of a soft system
In Figure 18, the diagram of the normalized average displacement of NF particles together with the normalized displacement of the node adjacent to NF has been plotted in the MF environment. It is obvious that the movement of NF is in the vicinity of the node adjacent to MF, and it only has small oscillatory motions around it.
1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (Micro Second)
Nor
mal
ized
X D
ispl
acem
ent
Normalized displacement of NF along X directionNormalized displacement of Adjacent node of MF along X direction
1 2 3 4 5 6 7 8 9 100.9992
0.9993
0.9994
0.9995
0.9996
0.9997
0.9998
0.9999
1
Time (Micro Second)
Norm
aliz
ed Y
Dis
plac
emen
t
Normalized displacement of NF along Y directionNormalized displacement of Adjacent node of MF along Y direction
Figure 18. Displacement of the MF and NF fields due to the displacement of the MF base in the x and y directions
7-ConclusionA method has been presented for the coupling of the continuum and atomic scales together. In the present model, the undesirable effects of free surfaces, common surfaces, and surfaces close to the interface with the macro field have been removed, and after offering a practical and notable procedure for the dynamics of systems in general, seven problems (in the form of three examples) have been presented to showcase the practicality, simplicity, and the effectiveness of this method. To generalize the issue, the macro/nano-related problems were divided into two groups of
Figure17:Displacement of the MF and NF fields due to the displacement of the MF base in the x-y plane; movement of a soft system
DynamicsofMacro–NanoMechanicalSystems;FixedInterfacialMultiscaleMethod
1 2
3 4
5
6
7
8 9
10 11
12
13
14 15
16 17
18
19
20 21
22 23
24
25
26 27
28 29
30
31
32 33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
Figure 17. Displacement of the MF and NF fields due to the displacement of the MF base in the x-
y plane; movement of a soft system
In Figure 18, the diagram of the normalized average displacement of NF particles together with the normalized displacement of the node adjacent to NF has been plotted in the MF environment. It is obvious that the movement of NF is in the vicinity of the node adjacent to MF, and it only has small oscillatory motions around it.
1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (Micro Second)
Nor
mal
ized
X D
ispl
acem
ent
Normalized displacement of NF along X directionNormalized displacement of Adjacent node of MF along X direction
1 2 3 4 5 6 7 8 9 100.9992
0.9993
0.9994
0.9995
0.9996
0.9997
0.9998
0.9999
1
Time (Micro Second)
Norm
aliz
ed Y
Dis
plac
emen
t
Normalized displacement of NF along Y directionNormalized displacement of Adjacent node of MF along Y direction
Figure 18. Displacement of the MF and NF fields due to the displacement of the MF base in the x and y directions
7-ConclusionA method has been presented for the coupling of the continuum and atomic scales together. In the present model, the undesirable effects of free surfaces, common surfaces, and surfaces close to the interface with the macro field have been removed, and after offering a practical and notable procedure for the dynamics of systems in general, seven problems (in the form of three examples) have been presented to showcase the practicality, simplicity, and the effectiveness of this method. To generalize the issue, the macro/nano-related problems were divided into two groups of
Figure18:Displacement of the MF and NF fields due to the displacement of the MF base in the x and y directions
InternationalJournalofNanoscienceandNanotechnology

246
method,andthepresentationofanelementwhichiscapableofbeingappliedfortheelectromechanicalsystems, has greatly expanded the range ofapplicationofthismethod.
7.ACKNOWLEDGMENT
The authors are indebted to the IranianNanotechnology Society (INS) for supportingpresent research.
REFERENCES
1. J. L. Ericksen and M. Gurtin: Academic Press.,(1984),50-66.
2. R.A.SauerandS.Li:JournalofNanoscienceandNanotechnology,Vol.8,(2007),pp.1-17.
3. D. Qian and R. H. Gondhalekar: InternationalJournal forMultiscaleComputationalEngineering,Vol.2,(2004),pp.277-289.
4. E.B.Tadmor,M.OrtizandR.Phillips: Philosophical MagazineA,Vol.73,(1996),pp.1529-1563.
5. V.B.Shenoy,R.Miller,E.B.Tadmor,R.Phillipsand M. Ortiz: Physical Review Letters, Vol. 80,(1998),pp.742-74.
6. S. P. Xiao and T. Belytschko: ComputerMethodsinApplied Mechanics and Engineering, Vol. 193,(2004),pp.1645-1669.
7. W.K.Liu,E.G.Karpov,S.ZhangandH.S.Park:ComputerMethodsAppliedMechandEngineering,Vol.193,(2004),pp.1529-1578.
8. W.K.Liu:ComputerMethodsinAppliedMechanicsandEngineering,Vol.195,(2006),pp.1407-1421.
9. R.R.MillerandE.B.Tadmor:JournalofComputerAidedMaterialsDesign,(2002),pp.9:203.
10. L.E.Shilkrot,R.E.MillerandW.A.Curtin:PhysicalReviewLetters,(2002),pp.89:025501.
11. H.S.ParkandW.K.Liu:Comput.MethodsAppl.Mech.Engrg,Vol.193,(2004),pp.1733–177.
12. F. Abraham, J. Broughton, N. Bernstein and E.Kaxiras: Computers in Phys.,Vol. 12, (1998), pp.538-546.
13. W. E and B. Engquist: Communication inMathematicalScience,Vol.1,No.1,(2003),pp.87-133.
14. J. Broughton, N. Bernstein, E. Kaxiras and F.Abraham:Phys.Rev.B,Vol.60,(1999),pp.2391-2403.
15. Y.ChenandJ.D.Lee:PhilosophicalMagazine,Vol.85,(2005),pp.4095-4126.
16. E. Saether, V. Yamakov and E. H. Glaessgen:International Journal for Numerical Methods inEngineering,Vol.78,(2009),pp.1292-1319.
17. R.Kumar,B.K.MishraandS.C.Jain:InternationalJournal of Advanced Manufacturing Technology,(2008),pp.38:551–562.
18. R. Kumar, B. K. Mishra and S. C. Jain: FiniteElements inAnalysis andDesign,Vol. 45, (2008),pp.13–24.
19. Z.K.Kusculuoglu andTh. J.Royston: Journal ofSoundandVibration,Vol.315,(2008),pp.911–926.
20. V. Balamurugan and S Narayanan: Smart Mater.Struct.,Vol.17,(2008),pp.31-35.
21. P.AllenandD.J.Tildesley:Clarendonpress,(1987).
22. M. W. Finnis and J. E. Sinclair: PhilosophicalMagazineA,Vol.50(1984),pp.45-55.
23. A.P.SuttonandJ.Chen:PhilosophicalMagazine,Vol.61,(1990),pp.139-146.
24. H.Rafii-Tabar: Physics Reports,Vol. 325, (2000),239-310.
25. M.H.Korayem,V.RahneshinandS.Sadeghzadeh:ComputationalMaterials Science,Vol. 63, (2012),pp.1–11.
26. M.H.Korayem,S.Sadeghzadeh,V.Rahneshin,A.Homayooni,andM.Safa:ComputationalMaterials Science,Vol.67,(2013),pp.11-20.
KorayemandSadeghzadeh