
DYNAMIC YARD TEMPLATE DESIGN TO IMPROVE UTILIZATION …
12
JOURNAL OF ENGINEERING AND MANAGEMENT IN INDUSTRIAL SYSTEM VOL. 6 NO. 2 YEAR 2018 e-ISSN 2477-6025 DOI:10.21776/ub.jemis.2018.006.02.2 Cite this Article as Nurminarsih, S., Putri, M., & Rusdiansyah, A. (2018). DYNAMIC YARD TEMPLATE DESIGN TO IMPROVE UTILIZATION AND OPERATION EFFICIENCY ON VERTICAL LAYOUT- CONTAINER YARDS CONSIDERING UNCERTAINTY OF TRUCK ARRIVAL. Journal of Engineering and Management in Industrial System, 6(2), p74-85. Paper Accepted : Nov, 17 th 2018 Paper Published : Dec, 31 st 2018 74 DYNAMIC YARD TEMPLATE DESIGN TO IMPROVE UTILIZATION AND OPERATION EFFICIENCY ON VERTICAL LAYOUT-CONTAINER YARDS CONSIDERING UNCERTAINTY OF TRUCK ARRIVAL Siti Nurminarsih 1) , Maulin Masyito Putri 1) , Ahmad Rusdiansyah 2) Department of Logistics Engineering, Universitas Internasional Semen Indonesia 1) Department of Industrial Engineering, Institut Teknologi Sepuluh Nopember 2) Abstract Loading containers into a vessel can be delayed because of inefficient processes in the container yard. These container yard inefficient processes can be caused by inappropriate stacking position and inefficient crane operation. Inappropriate containers stacking positions may need some preparatory jobs of rearranging containers ahead of loading time to reduce delays in the process. The method will allow preparatory jobs to be scheduled together with main jobs to optimize use of the idle time of Automated Stacking Cranes (ASC). This research aims to find a better scheduling strategy of twin ASCs as well as improving land utilization in a vertical-layout container yard to minimize delays in containers loading process. The uncertainty of truck arrival is accomodated by implementing iterative rescheduling in look-ahead planning horizon. The algorithm finds the optimal position of the container in the yard by implementing scoring function for each available slot. Finally, some numerical experiments are conducted to prove the performance of the algorithm. Keywords: Vertical Layout-Container Yard; Land Utilization; Iterative Rescheduling 1. Introduction International trade is growing during the economic globalization era. The growth of international trade brings along an increase in utilization of maritime logistics as the main means of transportation to distribute goods across countries. Being passed by 40 percent of maritime global trade route, making Indonesia as an important part of international trade. That means Indonesia should prepare their logistics infrastructures to be efficient and reliable for serving the operations. Unfortunately, Indonesian performance on logistics is still lacking and being ranked as 46th out of 160 countries surveyed by World Bank in 2018 [1]. The logistics performance score of Indonesia, which is 3.15, is lower than other neighborhood countries such as Singapore (4.00), Thailand (3.41), Vietnam (3.27), and Malaysia (3.22). This will be disadvantage for Indonesia to compete globally in economics. * Corresponding author. Email : [email protected] Published online at http://Jemis.ub.ac.id Copyright ©2018 JTI UB Publishing. All Rights Reserved Based on this issue and the challenge of global economics growth, the government of Indonesia set up the Masterplan for The Acceleration and Expansion of Indonesia’s Economic Development (MP3EI) 2011-2025. One of the important elements of this program is to enhance connectivity between regions in Indonesia and internationally through maritime transportation systems. Each region in Indonesia has different part in economic, based on their potentials, and connected by maritime transportation routes called “Sea Toll Road” [2]. These routes connect regions in Indonesia using hub and feeder concept. By this program, the transportation access to all regions in Indonesia will be available regularly on definite schedules. The impact of international trade growth and Sea Toll Road program increases the container traffic among ports in Indonesia. Ports should improve their infrastructure and operational efficiency to deal with this increasing traffic. In fact, the average dwelling time of ports in Indonesia is above 3 days [3]. Dwelling time is defined as the average time of container being in the port. The causes of this long dwell time are the complicated bureaucracies, the scarcity of land for container yard and a container transfer inefficiency during loading process [4].
Transcript of DYNAMIC YARD TEMPLATE DESIGN TO IMPROVE UTILIZATION …

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO. 2 YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
Cite this Article as Nurminarsih, S., Putri, M., & Rusdiansyah, A. (2018). DYNAMIC YARD TEMPLATE
DESIGN TO IMPROVE UTILIZATION AND OPERATION EFFICIENCY ON VERTICAL LAYOUT-CONTAINER YARDS CONSIDERING UNCERTAINTY OF TRUCK ARRIVAL. Journal of Engineering
and Management in Industrial System, 6(2), p74-85.
Paper Accepted : Nov, 17th 2018
Paper Published : Dec, 31st 2018 74
DYNAMIC YARD TEMPLATE DESIGN TO IMPROVE
UTILIZATION AND OPERATION EFFICIENCY ON VERTICAL
LAYOUT-CONTAINER YARDS CONSIDERING UNCERTAINTY OF
TRUCK ARRIVAL
Siti Nurminarsih1)
, Maulin Masyito Putri1)
, Ahmad Rusdiansyah2)
Department of Logistics Engineering, Universitas Internasional Semen Indonesia1)
Department of Industrial Engineering, Institut Teknologi Sepuluh Nopember2)
Abstract Loading containers into a vessel can be delayed because of inefficient processes in the container
yard. These container yard inefficient processes can be caused by inappropriate stacking position and
inefficient crane operation. Inappropriate containers stacking positions may need some preparatory jobs of
rearranging containers ahead of loading time to reduce delays in the process. The method will allow
preparatory jobs to be scheduled together with main jobs to optimize use of the idle time of Automated Stacking
Cranes (ASC). This research aims to find a better scheduling strategy of twin ASCs as well as improving land
utilization in a vertical-layout container yard to minimize delays in containers loading process. The uncertainty
of truck arrival is accomodated by implementing iterative rescheduling in look-ahead planning horizon. The algorithm finds the optimal position of the container in the yard by implementing scoring function for each
available slot. Finally, some numerical experiments are conducted to prove the performance of the algorithm.
Keywords: Vertical Layout-Container Yard; Land Utilization; Iterative Rescheduling
1. Introduction International trade is growing during the
economic globalization era. The growth of
international trade brings along an increase in utilization of maritime logistics as the main
means of transportation to distribute goods
across countries. Being passed by 40 percent of
maritime global trade route, making Indonesia as an important part of international trade. That
means Indonesia should prepare their logistics
infrastructures to be efficient and reliable for serving the operations. Unfortunately,
Indonesian performance on logistics is still
lacking and being ranked as 46th out of 160 countries surveyed by World Bank in 2018 [1].
The logistics performance score of Indonesia,
which is 3.15, is lower than other neighborhood
countries such as Singapore (4.00), Thailand (3.41), Vietnam (3.27), and Malaysia (3.22).
This will be disadvantage for Indonesia to
compete globally in economics.
* Corresponding author. Email : [email protected]
Published online at http://Jemis.ub.ac.id
Copyright ©2018 JTI UB Publishing. All Rights Reserved
Based on this issue and the challenge of
global economics growth, the government of Indonesia set up the Masterplan for The
Acceleration and Expansion of Indonesia’s
Economic Development (MP3EI) 2011-2025. One of the important elements of this program is
to enhance connectivity between regions in
Indonesia and internationally through maritime
transportation systems. Each region in Indonesia has different part in economic, based on their
potentials, and connected by maritime
transportation routes called “Sea Toll Road” [2]. These routes connect regions in Indonesia using
hub and feeder concept. By this program, the
transportation access to all regions in Indonesia will be available regularly on definite schedules.
The impact of international trade growth and
Sea Toll Road program increases the container traffic
among ports in Indonesia. Ports should improve their infrastructure and operational efficiency to deal with
this increasing traffic. In fact, the average dwelling
time of ports in Indonesia is above 3 days [3]. Dwelling time is defined as the average time of
container being in the port. The causes of this long
dwell time are the complicated bureaucracies, the scarcity of land for container yard and a container
transfer inefficiency during loading process [4].

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
75
Operational constraints at the container yard are
usually caused by a scarcity of the land and
infrastructure in the port. An efficient yard management is needed in the condition of increasing
demand and the scarcity of the land and
infrastructure. To implement an efficient yard
management, it is important to generate yard
template which can respond to uncertainties of operational condition. Yard template is a
guideline of yard operator to determine the
position of incoming container on the yard. The
yard template of vertical-layout container yard should be dynamic because the position of
containers can change all the time while in
container yard. This research developed an algorithm for determining dynamic-yard
template while considering the scheduling of
ASCs and optimizing space utilization. The rest of this paper is organized as follows. Section 2
provides the literature review. Section 3 details
the methods of the problem. Section 4 explains
the numerical experiments and results. Finally, section 5 gives conclusion and possible future
development of the research.
2. Literature Review
Several studies have been conducted to find
better method and approach of yard management.
Most of the research focus on the factors that cause inefficiency in the yard area, including the number of
containers reshuffle and traffic congestion. Yard
planner put containers on the yard based on position spesified on the yard template. The quality of yard
template planning affects the efficiency and
productivity of container handling. Generally, a yard template is made in the planning phase when the ship
had not arrived yet. Whilst when it comes to the
operating phase, some adjustments are often made to
the original layout because of high uncertainties, such as the arrival of the ship, the arrival of the truck, and
the volume to be transported. To improve the
efficiency, planning at the container yard should consider the uncertainties that occurs during
operation level [5].
To improve efficiency in the yard area, Lee et al. [6] combined the optimization of the reshuffle and
traffic congestion to make yard planning of
transshipment containers. A consignment strategy has
been introduced to minimize reshuffle by locating export and transshipment containers at the certain
area dedicated for the ships. The probablity of traffic
congestion has been minimized by implementing “High Low Workload Traffic Balancing Protocol”. A
mixed integer linear programming (MILP) then
developed to determine the crane scheduling. The
implementation of dedicated-yard area increases container accessability, but on the other hand also
decreases yard utilization because of empty spaces
that arise due to the absence of containers. In 2012, Jiang et al. [7] continued the research by suggesting
the space-sharing concept as the solution to the lack
of yard utilization that caused by the implementation of consignment. Jiang et al. [7] created a framework
for allocating space-sharing plan for each ship arrival.
However, this research worked at the planning level
where uncertainties in the operational level are ignored.
Uncertainties are often occured at the
operational phase, for example due to delays in operations at the previous port, weather, arrival of
external trucks, and number of receiving and
delivering containers. The longer the vessel’s path, the higher the level of uncertainty. A few studies have
examined port operations under uncertain
environments [8]. Most of them studied the impact of
vessel arrival time and operation time in quay or berth areas. Han et.al [9] and Zhen et.al [10] studied about
berth allocation and quay crane scheduling problem
under those uncertainties. At the yard areas, Zhen [5] addressed on the problem of planning a robust yard
template considering uncertainty in number of
receiving and delivering containers. These
uncertainties affect the determination of sub blocks in container yard (CY) which are assigned in fully-
dedicated or sharing mode for each vessel. In this
research, vessels are scheduled to visit the port periodically (weekly, 10-days, or biweekly). The
number of receiving and delivering containers from
(or to) a vessel also fluctuates in each period. The traffic congestions in the yard and multiple schedule
cycle time for vessel arrival pattern are also
considered in the developed model. Both of Jiang et
al. [7] and Zhen [5] developed method to optimize the utilization of horizontal layout-container yard which
is commonly used in Asian ports. The operational of
vertical layout-container yard is different with horizontal layout. It is hard to determine the dedicated
area on the yard for certain vessel because the
containers are moved several times at the yard since arrival until departure.
The movement of the container on the vertical
layout-container yard can be divided into three types
of movements. The first one is movement that occurs when container first arrives at the yard, both carried
by external truck or AGV. Next movement is
rehandling. This movement is needed when the container to be retrieved next is not at the top of a

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
76
stack which causes relocation of all containers above
the target container. Rehandling is the major source of
loading delays [11]. Another factor that causes delay is the traveling distance of ASC to move container to
be loaded. To minimize loading delays due to these
two factors, the third type of movement arises, namely remarshaling. Remarshaling rearranges the
containers in some appropiate ways well ahead of
their loading time [11]. Park et al. [12][13] suggested the remarshaling jobs that contribute the most to the
reduction of future loading delays to be selected for
the mix of job queue. Therefore, starting and stoping
time of remarshaling jobs should be determined manually and not yet scheduled together with the
current requested jobs. Later in 2013, Choe et al. [11]
proposed method to schedule the twin ASCs in such a way that the remarshaling jobs are performed
intermittently while the ordinary requested jobs are
performed. Adopting the predetermined fixed-length look-ahead horizon in a regular interval framework
by Park et al. [14], the remarshaling jobs are mixed to
the requested jobs unless the load of requested jobs is
heavy. The objective function of this method is to minimize the total waiting time of external truck,
delay of AGV, and total makespan of the schedule.
The utilization of space is not a major consideration in this research.
Previously, Nurminarsih et al. [4] has been
developed a sharing-area framework for vertical
layout-container yard under uncertainty of the arrival of containers which is adopting the method
developed by Jiang et al. [7] and Zhen [5]. The
research is developed based on real situation in one of port in East Java, Indonesia, which implement
vertical layout-container yard. The uncertainty of
container arrival is translated into container arrival probability during the slot opening horizon, 5-days
ahead the vessel arrival schedule. This probability is
based on historical data of container arrival.
Nurminarsih et al. [4] only introduced the framework and method for implementing the space-sharing
concept without considering the movement of ASC.
This research aims to develop the previous research of Nurminarsih et al. [4] by taking into account the
scheduling of ASCs. Model for scheduling ASCs is
adopted from Choe et al. [11] while adding the consideration of space utilization as the outcome of
sharing-area concept.
3. Methodology
3.1 Operation in Vertical Layout-Container
Yard
Vertical layout-container yard is often
called the European Layout, because this layout is generally used in European container ports. In
the vertical layout-container yard, the yard has
blocks positioned perpendicular to the quay (see Fig. 1) and the I/O points are located at both ends
of the blocks to handle storages and requests
from the seaside and landside [15]. Based on the the direction of flow, the containers handled on
the yard terminal can be categorized into three
groups: export, import, and transhipment
containers. An export container carried in by external truck (ET) and being stored in the yard
until the arrival of carrier ship, the container then
being moved from the yard and loaded into the ship by Quay Crane (QC). On the contrary, the
import container carried in to the yard by
Automated Guided Vehicle (AGV) after being unloaded from the ship by QC. The import
container will be stored at the yard until carried
by ET. A transhipment container is also unloaded
from ship and carried in by AGV to the yard, but the container will be carried out again by AGV
to be reloaded to another ship instead of being
carried out by an ET. The movements of a container in the yard
are handled by Automated Stacking Crane
(ASC). There are two identical ASCs for each
block in the yard, namely seaside and landside ASC. Seaside ASC works on the quay side,
assigned to deliver (or take) a container to (from)
AGV. On the other hand, the landside ASC is assigned to carry in (out) a container to (or from)
yard from (or to) an ET on the landside H/P.
Because the size of both ASCs are identical, the ASC cannot move through each other and
separate by a transfer area which is called
handshake area. Unlike the transhipment
container, both import and export container enter a block through one end of a block and go out
through the opposite end of the block, this means
that both import and export container cannot help being handled by both seaside and landside
ASC. The job of moving container from landside
H/P to the yard or vice versa is called lanside job. While the job of moving container from seaside
H/P to the yard or vice versa is called seaside job.
Both landside and seaside job are categorized as
main job to differentiate it from preparatory job: rehandling
JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
77
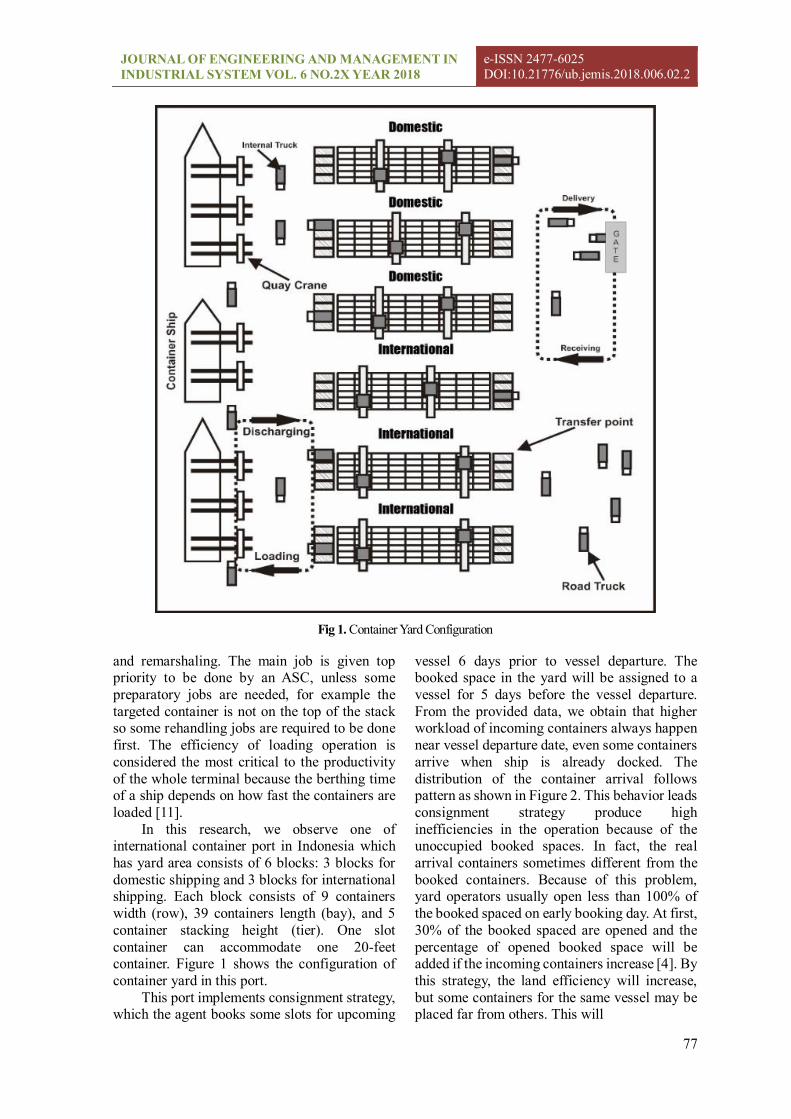
Fig 1. Container Yard Configuration
and remarshaling. The main job is given top priority to be done by an ASC, unless some
preparatory jobs are needed, for example the
targeted container is not on the top of the stack so some rehandling jobs are required to be done
first. The efficiency of loading operation is
considered the most critical to the productivity
of the whole terminal because the berthing time of a ship depends on how fast the containers are
loaded [11].
In this research, we observe one of international container port in Indonesia which
has yard area consists of 6 blocks: 3 blocks for
domestic shipping and 3 blocks for international shipping. Each block consists of 9 containers
width (row), 39 containers length (bay), and 5
container stacking height (tier). One slot
container can accommodate one 20-feet container. Figure 1 shows the configuration of
container yard in this port.
This port implements consignment strategy, which the agent books some slots for upcoming
vessel 6 days prior to vessel departure. The booked space in the yard will be assigned to a
vessel for 5 days before the vessel departure.
From the provided data, we obtain that higher workload of incoming containers always happen
near vessel departure date, even some containers
arrive when ship is already docked. The
distribution of the container arrival follows pattern as shown in Figure 2. This behavior leads
consignment strategy produce high
inefficiencies in the operation because of the unoccupied booked spaces. In fact, the real
arrival containers sometimes different from the
booked containers. Because of this problem, yard operators usually open less than 100% of
the booked spaced on early booking day. At first,
30% of the booked spaced are opened and the
percentage of opened booked space will be added if the incoming containers increase [4]. By
this strategy, the land efficiency will increase,
but some containers for the same vessel may be placed far from others. This will

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
78
Fig 2. The Pattern of Containers Arrival [7]
cause the inefficiency of yard movements. In this research, the incoming container will
be placed temporary on the handshake area and
will be moved later to the landside or seaside area by the remarshaling jobs. There is no special
area dedicated to containers from certain vessels
(such as in consignment strategies), but containers from the same vessel will always be
placed close to each other. Containers from other
vessels will tend to be placed in different
locations at the yard. This strategy will minimized delay that is caused by rehandling
job.
3.2 Real-time scheduling of ASCs
The algorithm of real-rime ASCs
scheduling used in this research is developed from Algorithm for Opportunistic Remarshaling
(AOR) by Choe et al. [11]. Firstly, the ASC
scheduling method sorts out all the landside and
seaside jobs within a look-ahead horizon and finds out whether preparatory jobs (rehandling,
repositioning) are needed. Then the method
performs an optimization search to specify the ASC to perform each of the preparatory jobs, the
order of jobs, and the priority in case of ASC
interference. AOR adds some remarshaling jobs
for the upcoming vessel to be done at any idle time in-between the ordinary jobs. Due to
accomodating the uncertainty of the
environtment, the outdated schedule is refreshed by iterate this process at short regular intervals.
We follows the iterative recheduling method by Choe et al. [16] in which the process
of developing a new schedule is repeated in a
predetermined recheduling interval r as indicated in the timing diagram of Figure 3. In the
diagram, t_1 is the starting time of scheduling for
the jobs in the i-th iteration. The scheduling is made for the next look-ahead horizon h, within s
permittable computational time. Therefore, the
schedule period is between t_1+s until t_1+s+h.
The rescheduling process will be repeated every interval r. The length of rescheduling interval
and look-ahead horizon should be determined
carefully considering various tradeoffs [16]. As h gets longer, a better scheduling result might be
expected because a greater number of future jobs
are taken into account. However, longer h demands a larger amount of computational times
to generate a schedule, also it is not desirable
because the uncertainty at the operational level
regarding ET arrival time is very high, thus make the schedule obtained has poor quality. As in the
Choe et al. [11], we determine the values of r,h,s
are 300, \1800, and 60 seconds respectively.
3.2.1 Job Priority Determination
Before determining the priority, the first
step of this method is determining the jobs to be scheduled. The jobs can be divided into main
jobs and preparatory jobs. The main jobs include
seaside jobs which the expected AGV arrival times are within the look-ahead horizon

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
79
Fig 3. Timing Diagram of Iterative Rescheduling [11] and landside jobs which the ETs have already
arrived at the landside H/P. The arrival of ET is
randomly generated to reflect the uncertainty in
real system. The preparatory jobs included in the scheduling are the rehandling and repositioning
jobs required to be done in order to access the
container of the main jobs. If there is still time left on the look-ahead horizon, some
remarshaling jobs for upcoming vessel will be
scheduled. The seaside jobs are given top priority among all types of jobs, because it is
critical of causing the loading delays and
affecting the port performance.
For sorting out the list of jobs, firstly we calculate the estimate finish time of each job. To
maintain the preparatory jobs are done right
before their main jobs, we pair them into a single consecutive job and sum up their processing
time. For each determined job, we calculate the
difference between expected arrival time of ET/AGV/vessel and the estimate finish time of
the job. Then we sort jobs by giving priority to
jobs that have the smallest difference. The
overall scheduling process can be seen in the flowchart in Figure 4.
3.2.1 Determination of Stacking Locations This procedure is used to determine the
optimal location for container handled in the
yard. Several policies to determine the optimal
location is modified from Choe et al. [11], which
is also modification of previous work by Jang et
al. [17]. This stacking policy is required
whenever an ASC has to drop a container at
some location in the yard. The drop off location can be an empty ground in the block or at the top
off every stack which has not reached the
stacking limit. As for the stack which has already reached its allowed maximum, the stack has to
be filtered out from the list of candidate
positions. The stacking location should be determined not only for incoming containers but
also for rehandled or remarshaled containers. In
this research we limit the problem only for 20ft
container and ignore the container weight stacking rule.
We modified the scoring function of
Choe et al. [11] by adding function to calculate container similarity. The container similarity
function is used to direct container to locations
where other containers with similar destinations are located. By implementing this function, the
need for preparatory jobs will be minimized
because all containers in the same stacking
location have similar destination vessel. We eliminate the transshipment function because
transshipment process is not considered in this
study. The stacking rules for different types of containers in different situations can be seen in
Table 1. Each rules of the policy in the table has
a scoring function. Given a set of candidate

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
80
posisitions X, scoring function 𝑠𝑖 will determine the
Fig 4. Flowchart of Scheduling Process in CY
best position 𝑥∗from X. The score 𝑠𝑖(𝑥) of a
candidate posisition x is calculated by the weighted
sum function below. Where 𝐶𝑖𝑗(𝑥) is the evaluation
value of position x according to the rule of 𝑠𝑖. The
weight of 𝐶𝑖𝑗 is 𝑤𝑖𝑗 and 𝑘𝑖 is the number of criteria
employed by 𝑠𝑖.
𝒔𝒊(𝒙) = ∑ 𝒘𝒊𝒋𝑪𝒊𝒋(𝒙)
𝒌𝒊
𝒋=𝟏
( 1 )
Table 1. Clasification of Containers Stacking Rules
Condition Types of
Containers
Evaluation
Criteria
Incoming Import 𝑠1
Export 𝑠2
Rehandling Import 𝑠3
Export 𝑠4
Remarshaling Import 𝑠5
Start
1. Make a list of activities
2. Specify the location of containers
3. Calculate the process time and
specify the critical time
4. Sort the activities based on the
critical time
5. Input the activities in planning
horizon h
6. Is the
cumulative process
time < planning
horizon h?
7. Make improvement of the job
sequence to minimize total makespan
End
Data Random of the
Trucks Arrival
Data of the AGV
Arrival
Data of
Remarshaling
Yes
No

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
81
Export 𝑠6
Evaluation criteria used in the scoring function
could better be understood by examining the scoring functions more detail. Following is detail scoring
function of S2 used for incoming export containers:
𝒔𝟐 =𝒘𝟏𝑫𝟏(𝑿) +𝒘𝟐𝑫𝟎(𝑿) +𝒘𝟑𝑯(𝑿) +𝒘𝟒𝑻(𝑿) +𝒘𝟓𝑲(𝑿)
(2)
Where 𝐷1 is the distance of the current
position to candidate position X. 𝐷0(𝑋) is the distance of candidate position X from landside
H/P. 𝐻(𝑋) is the stack height of candidate
position. 𝑇(𝑋) is the likelihood of causing
rehandling if target container is put on candidate
position X. While 𝐾(𝑋) is the uniformity score
of the candidate position X in which represents
the degree of destination similarity with other containers surround it. For all candidate
positions X, the value of 𝑠2 is calculated then the
candidate position with smallest value is chosen
as the optimal position for the target container.
3.2.1 Searching for an Optimal Schedule After the job-queue for a look-ahead horizon
is fixed, the schedule then optimized by swapping the
sequence of the jobs to find a combination which gives minimum makespan. The objective function for
schedule optimization is the following weighted sum
that should be minimized:
𝒇 = 𝒘𝟏𝑫𝑨𝑮𝑽 + 𝒘𝟐𝑫𝑬𝑻 + 𝒘𝟑𝑴 +𝒘𝟒𝑹(3)
where 𝐷𝐴𝐺𝑉 is the average delay of AGVs, 𝐷𝐸𝑇 is the average waiting time of ETs, M is the
makespan, and R is the rehandling jobs. The
minimation of 𝐷𝐴𝐺𝑉, 𝐷𝐸𝑇 , and R are obtained in
generating jobs phase, while the minimation of makespan is generated from second phase,
which is improvement of job queue by swapping
the sequence.
4. Experimental Results
The experiment involving a set of vessel arrival data, random ET arrival data, and generated
AGV arrival data. The vessel data includes
information of date of vessel arrival and the number
of containers being loaded or unloaded from the ship.
The AGV arrival data generated within the window of vessel arrival and departure, the number of trips is
adjusted by the number of containers being carried,
both for loading and unloading containers. The available information is AGV arrival time to the yard,
type of operation, container code that being handled,
and vessel code that being served. Different from AGV, the random arrival data for ET to deliver the
container is spread between 5 consecutive days prior
the vessel departure. While the arrival of ET for
retrieving the import containers is generated randomly after vessel arrival. The information of ET
arrival also includes ET arrival time, type of
operation, container code that being handled, and vessel code of container destination. Those data are
compiled into Input Job data as the input of the
scheduling process. Table 2 represents several input
jobs for this experiment.
We set the scheduling parameter of r, h, s is
300, 1800, and 60 seconds respectively. The
algorithm first generated the queue job by identifying the arrival of ET and AGV within the look-ahead
horizon to be scheduled as the main jobs. When ET
or AGV brings in container to the yard, then the algorithm will find the optimum posisition on the
yard by implementing the scoring function. On the
other hand, if ET or AGV will takes out container
from the yard, the algorithm will find the location of targeted container and identify whether some
preparatory jobs are needed.
Some preparatory jobs (i.e rehandling and repositioning jobs) are needed if the targeted
container is located not on the top of the any stack. In
order to access the container, some containers above the targeted location have to be moved to other
location first. The destination location of rehandling
and repositioning container also being optimized
using rule number 3 and 4 on the Table 1. The rules are implemented to prevent any other movement of
that container in the future. The original targeted
container can be moved to ET or AGV by an ASC after all its preparatory jobs finished. The processing
time of the jobs become longer because of the
additional preparatory jobs. Table 3 shows the job that needed some preparatory jobs. An ET need to carry
out a container “MRLU2363500” from the location
of slot 1,3,2 at the yard. Unfortunately, there are three
containers above that have to be moved first before accessing the targeted container. The schedule will
determine the best location for the rehandling
containers, which are on the neighboring slot. Finally,

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
82
the targeted container can be moved to the landside area after all
Table 2. Input Jobs
Arrival Date Vehicle Activity Vessel ID Container ID
1/1/2018 0:02 ET 1 RELI006 MRTU2149246
1/1/2018 1:27 ET 1 RELI006 MRTU2045641
1/1/2018 1:30 ET 1 RELI006 TGHU0572960
1/1/2018 1:46 ET 1 RELI006 MRTU2042643
1/1/2018 3:05 AGV 1 RERO006 MRLU2387707
1/1/2018 3:10 AGV 1 RERO006 MRLU2363860
1/1/2018 3:15 AGV 1 RERO006 TEXU2582173
1/1/2018 3:20 AGV 1 RERO006 MRLU2341265
1/1/2018 3:25 AGV 1 RERO006 MRLU2380451
1/1/2018 3:25 ET 1 RELI006 TRLU9164682
1/1/2018 3:30 AGV 1 RERO006 MRTU9601872
1/1/2018 3:35 AGV 1 RERO006 MRTU9614904
1/1/2018 3:40 AGV 1 RERO006 MRLU4200287
1/1/2018 3:45 AGV 1 RERO006 MRTU2124891
1/1/2018 3:49 ET 0 RERO006 MRTU2059796
1/1/2018 3:50 AGV 1 RERO006 MRTU2059796
1/1/2018 3:55 AGV 1 RERO006 MRTU2155022
1/1/2018 4:00 AGV 1 RERO006 MRTU2054752
1/1/2018 4:05 AGV 1 RERO006 MRLU2363500
Table 3. Iterative Scheduling Result
NoContainer
NameOrigin Destination
Processing
Time
Finishing
Time
Arrival Time
at HPDeviation Information
1 MRLU2335880 Slot 1,3,5 Slot 1,4,1 31.1 Rehandling MRLU2363500
2 MRTU2022776 Slot 1,3,4 Slot 1,4,2 31.1 Rehandling MRLU2363500
3 MRTU2063369 Slot 1,3,3 Slot 1,4,3 31.1 Rehandling MRLU2363500
4 MRLU2363500 Slot 1,3,2 Landside 22.1 1/1/2018 4:26 1/1/2018 4:25 -0.000856 Target Rehandling
5 MRLU2320771 Seaside Slot 18,1,1 55.9 1/1/2018 4:25 1/1/2018 4:25 -0.000637 In AGV
6 MRTU2072165 Seaside Slot 18,1,2 50.7 1/1/2018 4:25 1/1/2018 4:30 0.0028935 In AGV
7 MRTU2154704 Seaside Slot 18,1,3 45.5 1/1/2018 4:25 1/1/2018 4:35 0.0064236 In AGV
8 MRTU2096927 Landside Slot 22,1,1 55.9 1/1/2018 4:25 1/1/2018 4:35 0.0065625 In ET
9 MRTU9615135 Seaside Slot 18,1,4 40.3 1/1/2018 4:25 1/1/2018 4:40 0.0099537 In AGV
10 MRTU9608157 Seaside Slot 18,1,5 35.1 1/1/2018 4:25 1/1/2018 4:45 0.0134838 In AGV
11 MRTU9601830 Seaside Slot 18,2,1 55.9 1/1/2018 4:25 1/1/2018 4:50 0.0167245 In AGV
12 MRTU2063369 Slot 1,4,2 Slot 1,4,3 15.6 Rehandling MRLU2335880
13 MRLU2335880 Slot 1,4,1 Landside 27.3 1/1/2018 4:25 1/1/2018 4:53 0.0189583 Target Rehandling
14 MRTU9608157 Slot 18,1,5 Slot 1,4,2 43.9 1/1/2018 4:25 1/1/2018 3:03 -0.057442 Remarshaling
15 MRTU9615135 Slot 18,1,4 Slot 1,4,3 38.7 1/1/2018 4:25 1/1/2018 3:03 -0.057384 Remarshaling
16 MRTU2154704 Slot 18,1,3 Slot 1,4,4 38.7 1/1/2018 4:25 1/1/2018 3:03 -0.057384 Remarshaling
17 MRTU2072165 Slot 18,1,2 Slot 1,4,5 38.7 1/1/2018 4:25 1/1/2018 3:03 -0.057384 Remarshaling
18 MRLU2320771 Slot 18,1,1 Slot 1,5,1 38.7 1/1/2018 4:25 1/1/2018 3:03 -0.057384 Remarshaling
19 MRTU9601830 Slot 18,2,1 Slot 1,5,2 38.7 1/1/2018 4:25 1/1/2018 3:03 -0.057384 Remarshaling
20 MRTU2096927 Slot 22,1,1 Slot 39,6,4 33.5 1/1/2018 4:25 1/2/2018 23:19 1.7871181 Remarshaling

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
83
Fig 5. Initial Layout before Rehandling
Fig 6. Layout after Rehandling
the rehandling jobs handled. The movement of
containers can be seen on figure 5 (initial layout) and
figure 6 (after rehandling layout).
After all main jobs in the look-ahead horizon
have been scheduled, the algorithm investigates for
the remaining time available. Some remarshaling jobs are added one by one to the queue until the
scheduling time is up. To find the best candidate
location for the remarshaling container, the algorithm will implement rule number 5 and 6 on Table 1
depend on the container type. The remarshaling job
for the export container will be handled by seaside
ASC, while remarshaling for import container handled by landside ASC. The remarshaling jobs will
only be done if there is container on the transfer area
and the scheduling time is still available. If the ASCs
are busy with the main jobs, then the remarshaling jobs will not be handled. In the given scenario, the
quantity of the job is not many, makes it sufficient to
handle the remarshaling jobs in the idle time of each scheduling window. The remarshaling jobs is marked
with “Remarshaling” title in information column of
Table 3. The position destination slot will always change during the iterative rescheduling because of
any movements from previous actions. The exact
location can only be obtained several minutes prior to
the processing time.
5. Conclusion

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
84
Yard management is important to improve the
operational performance of a port. Some important
factors on yard management are yard template generation and ASC scheduling. Generating yard
template has to be robust to accommodate the
uncertainties of real operational situations, such as the arrival of external trucks or containers. To
accommodate the uncertainties, some ports
implement the consignment strategy in which shippers book some location for their upcoming
containers. Practically, this strategy can improve the
accessibility of the container because container with
similar detination vessel will be placed nearch each other, but in some occasions this strategy will lead to
inefficient usability of yard area. This low utilization
of the yard area is caused by the uncertainty of container arrivals. In this research, the algorithm for
improving container yard utilization has been
developed and the conducted numerical experiment
showed some results, which are:
a. In the algorithm, the utilization is maintained
by placing the incoming container at the
transfer area first and rearranging it again near the similar vessel destination containers
through remarshalling process prior to the
departure date. b. The scheduling process in this research are
conducted in two steps, the first step is
determining the jobs queue and next step is
improving the sequence of the job to minimize the makespan.
c. The improvement process is done manually by
swapping the sequence of the queuing jobs. d. Some scoring rules that have been
implemented to determine the optimal location
for the containers represent a good performance by placing the similar containers
on the neighbouring area.
Future research is needed to accommodate
several characteristics of containers, including size and weight. The development of the improvement
method is also needed, for example by employing
heuristics algorithm rather than arbitrary swapping.
6. Acknowledgment We are thankful to the Direktorat Riset dan
Pengabdian Masyarakat - Direktorat Jendral Penguatan Riset dan Pengembangan - Kementrian Riset, Teknologi dan Pendidikan Tinggi - Indonesia for providing the funding for this research. We also thank all the staff in Lembaga Penelitian dan Pengabdian Masyarakat - Universitas Internasional Semen Indonesia for
facilitating this research.
References [1] The World Bank..Global Ranking 2018.
Available from:
https://lpi.worldbank.org/international/global [Accessed 17 September 2018].
[2] BAPPENAS. Laporan Implementasi Konsep
Tol Laut 2015-2019, Jakarta: Kementerian Perencanaan dan Pembangunan Nasional; 2015.
[3] Pitoko, R.A..Penasaran "Dwelling Time" di Atas
3 Hari, Menhub akan Datangi Tanjung Priok. Available from: https://ekonomi.kompas.com/read/2018/04/03/1
45600326/penasaran-dwelling-time-di-atas-3-
hari-menhub-akan-datangi-tanjung-priok. [Accessed 12 Nopember 2018].
[4] Nurminarsih, S., Rusdiansyah, A. and Putri,
M.M.. Space-sharing Strategy for Building
Dynamic Container Yard Storage Considering Uncertainty on Number of Incoming Containers.
Jurnal Teknik Industri. 2018;19(2): pp.67-74.
[5] Zhen, L.. Container yard template planning under uncertain maritime market.
Transportation Research Part E. 2014; 69: pp.
199-217. [6] Lee, L.H., Chew, E.P., Tan, K.C., Han, Y. An
optimization model for storage yard
management in transshipment hubs. OR
Spectrum. 2006; 28: pp. 539–561. [7] Jiang, X., Lee, L.H., Chew, E.P., Han, Y., Tan,
K.C. A container yard storage strategy for
improving land utilization and operation efficiency in a transshipment hub port. European
Journal of Operation Research. 2012; 221: pp.
64-73. [8] Alcalde, E.M., Kim, K.H., Marchan, S.S..
Optimal space for storage yard considering yard
inventory forecasts and terminal performance.
Transportation Research Pert E. 2015; 82: pp. 101-128.
[9] Han, X.L., Lu, Z.Q., Xi, L.F. A proactive
approach for simultaneous berth and quay crane scheduling problem with stochastic arrival and
handling time. European Journal of Operation
Research. 2010; 207: pp. 1327-1340.
[10] Zhen,L., Lee, L.H., Chew, E.P. A decision model for berth allocation under uncertainty. European
Journal of Operation Research. 2011; 212: pp.
54-68. [11] Choe, R., Kim, T.S, Kim, T.,Ryu , K.R. Crane
Scheduling for Opportunistic Remarshaling of
Containers in an Automated Stacking Yard.

JOURNAL OF ENGINEERING AND MANAGEMENT IN
INDUSTRIAL SYSTEM VOL. 6 NO.2X YEAR 2018
e-ISSN 2477-6025
DOI:10.21776/ub.jemis.2018.006.02.2
85
Flexible Service and Manufacturing Journal.
2015; 27: pp 331-349.
[12] Park T, Kim J, Ryu KR. Iterative replanning using genetic algorithms for remarshaling in a
container terminal. InProceedings of the 10th
IASTED International Conference. 2010; Vol. 674, No. 120, p. 22.
[13] Park K, Park T, Ryu KR. Planning For Selective
Remarshaling in an Automated Container Terminal using Coevolutionary Algorithms.
International Journal of Industrial Engineering.
2013 Jan 1;20.
[14] Park T, Choe R, Ok SM, Ry KR. Real-time scheduling for twin ASCs in an automated
container. OR Spectr. 2010; 32: pp593-615.
[15] Carlo, H.J., Vis, I.F.A., Roodbergen, K.J. Storage yard operations in container terminals:
literature review, trends, and research directions.
European Journal of Operation Research 2014: 235: pp 412-430.
[16] Choe R, Yuan H, Yang Y, Ryu KR. Real-time
scheduling of twin stacking cranes in an
automated container terminal using a genetic algorithm. InProceedings of the 27th Annual
ACM Symposium on Applied Computing 2012
Mar 26. pp. 238-243. ACM. [17] Jang H, Choe R, Ryu KR. Deriving a robust
policy for container stacking using a noise-
tolerant genetic algorithm. InProceedings of the
2012 ACM Research in Applied Computation Symposium 2012 Oct 23. pp. 31-36. ACM.


















