Dynamic control of sensor networks with inferential ecosystem models Jim Clark, Environm, Biol, Stat...
27
Dynamic control of sensor networks with inferential ecosystem models Jim Clark, Environm, Biol, Stat Pankaj Agarwal, Comp Sci David Bell, Environment Carla Ellis, Comp Sci Paul Flikkema, EE, NAU Alan Gelfand, Stat Gabriel Katul, Environment Kamesh Munagala, Comp Sci Gavino Puggioni, Comp Sci Adam Silberstein, Comp Sci Jun Yang, Comp Sci
-
Upload
easter-newton -
Category
Documents
-
view
215 -
download
0
Transcript of Dynamic control of sensor networks with inferential ecosystem models Jim Clark, Environm, Biol, Stat...
Dynamic control of sensor networks with inferential
ecosystem modelsJim Clark, Environm, Biol, StatPankaj Agarwal, Comp SciDavid Bell, EnvironmentCarla Ellis, Comp SciPaul Flikkema, EE, NAUAlan Gelfand, Stat
Gabriel Katul, EnvironmentKamesh Munagala, Comp SciGavino Puggioni, Comp SciAdam Silberstein, Comp SciJun Yang, Comp Sci

Motivation
• Understanding forest response to global change (climate, CO2)
• Forces at many scales– Complex interactions– lagged responses
• Uneven data needs: occasionally dense, at different scales
• Wireless networks can provide dense data, across landscapes
Ecosystem models that could use wireless data
• Physiology – PSN, respiration responses to weather,
climate
• C/H2O/energy– Atmosphere/biosphere exchange (pool
sizes, fluxes)
• Biodiversity– Differential demographic responses to
weather/climate, CO2, H2O

Physiological responses to weather
H2O, N, P
H2O, CO2light, CO2
Temp
PSN Resp
Sap flux
Allocation
Fast, fine scales
Precip
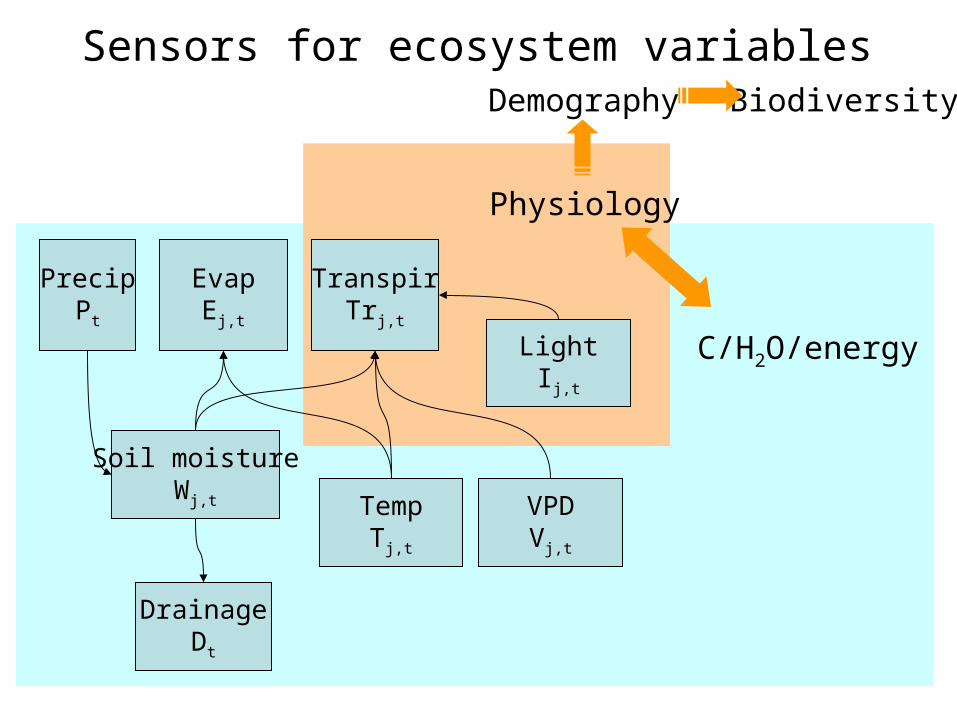
Sensors for ecosystem variables
Soil moistureWj,t
PrecipPt
EvapEj,t
TranspirTrj,t
DrainageDt
LightIj,t
TempTj,t
VPDVj,t
C/H2O/energy
Demography Biodiversity
Physiology

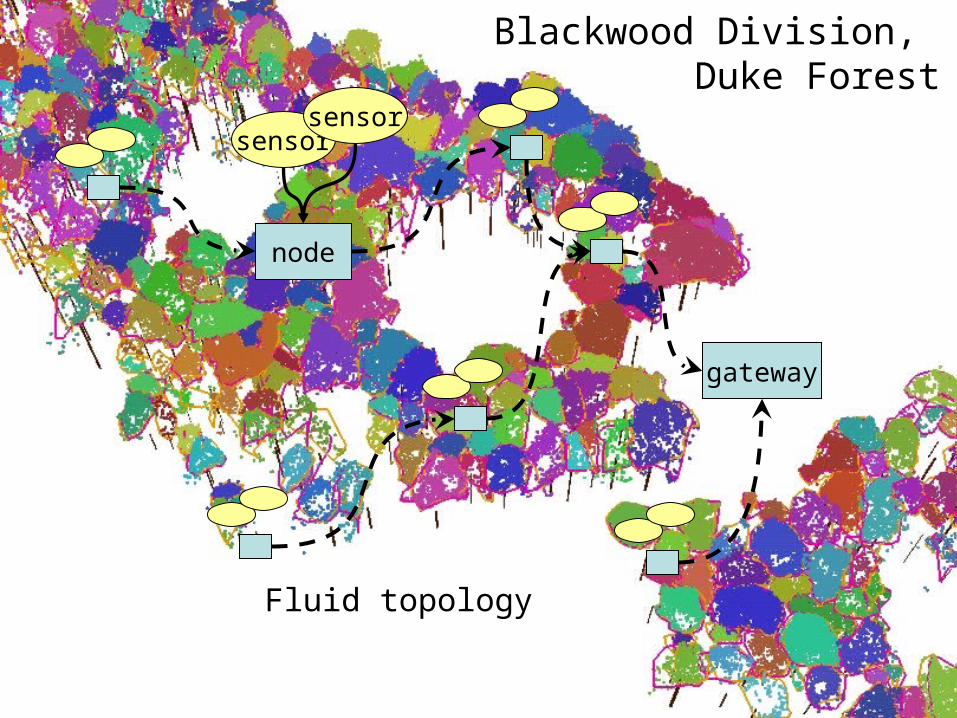
WisardNet: a wireless network
• Multihop, self-organizing– Sensors for light, soil & air T, soil moisture,
sap flux– Tower weather station
• Minimal in-network processing
node
sensorsensor
gateway
Self-organizing wireless connections
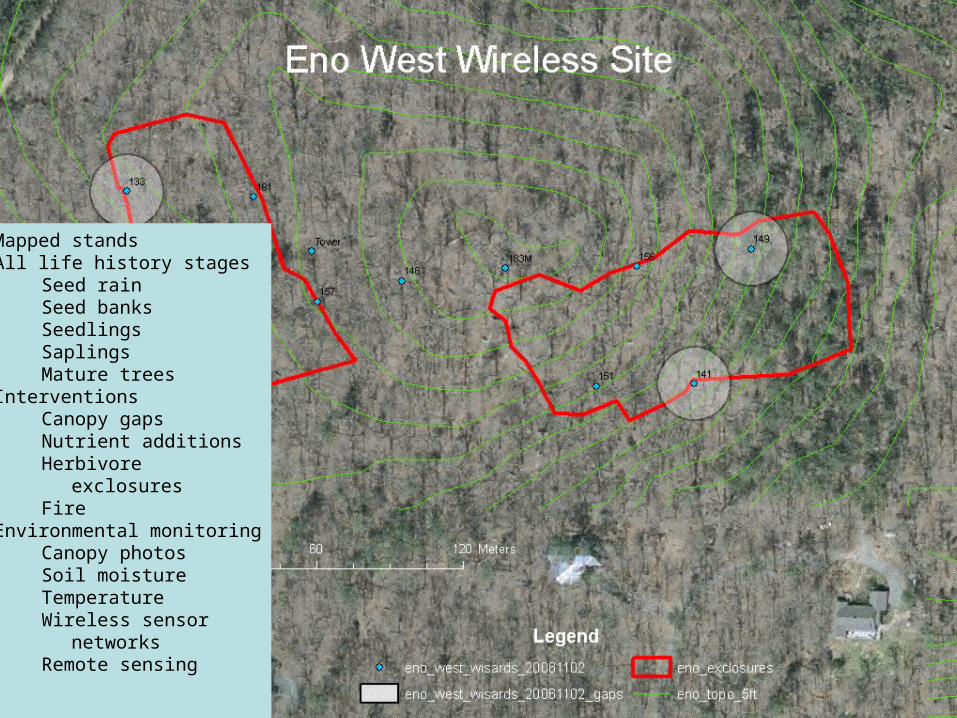
Mapped standsAll life history stages
Seed rainSeed banksSeedlingsSaplingsMature trees
InterventionsCanopy gapsNutrient additionsHerbivore exclosuresFire
Environmental monitoringCanopy photosSoil moistureTemperatureWireless sensor
networksRemote sensing
node
sensorsensor
gateway
Fluid topology
Blackwood Division, Duke Forest
The goods and the bads
•The good:-Potential to collect dense data-Adapts to changing communication potential
•The bad: -Most data uninformative, redundant, or both-Battery life of weeks to months, depending on transmission rate-Checking and replacing batteries is the primary maintenance cost of network
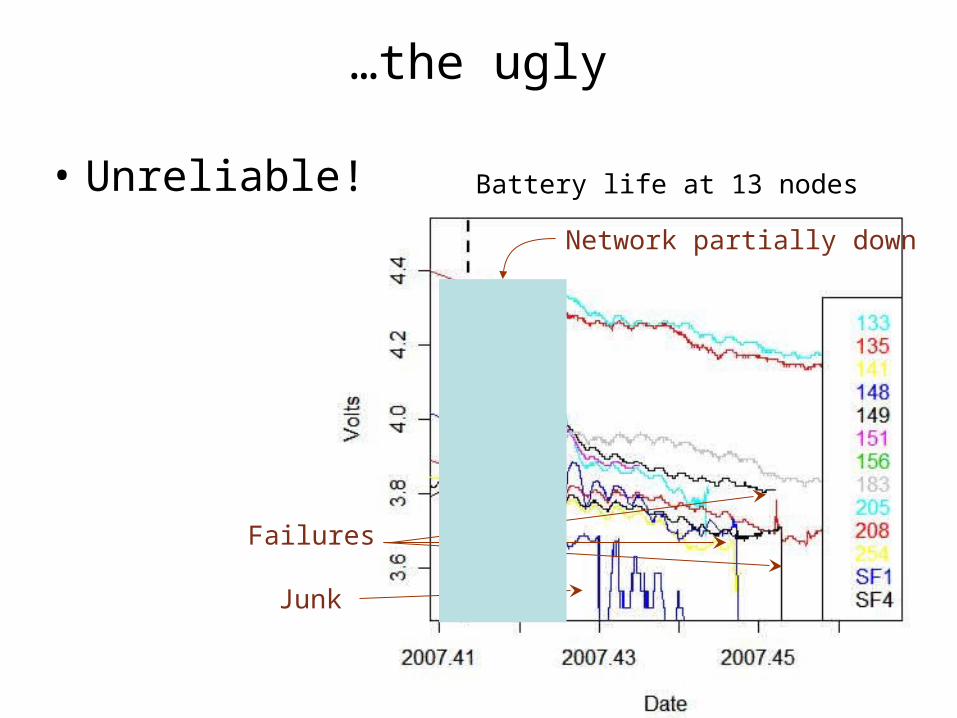
…the ugly
• Unreliable! Battery life at 13 nodes
Network partially down
Failures
Junk
A dynamic control problem
• What is an observation worth?(How to quantify learning?)
• The answer recognizes:– Transmission cost of an observation– Need to assess value in (near) real time
• Based on model(s)• Minimal in-network computation capacity• Use (mostly) local information
– Potential for periodic out-of-network input
A framework for data collection
• ‘Predict or collect’: – Transmit an observation if it could not
have been predicted by a model.
• Fast decisions (real-time)• Must rely on (mostly) local
information– Minimize transmission
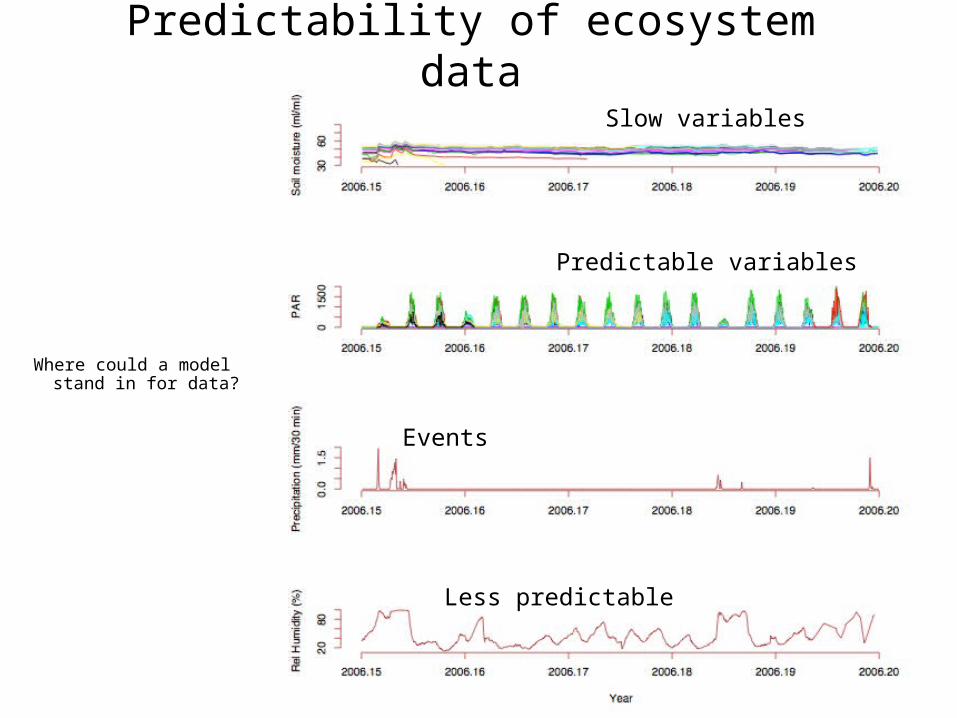
Predictability of ecosystem data
Where could a model stand in for data?
Slow variables
Predictable variables
Events
Less predictable
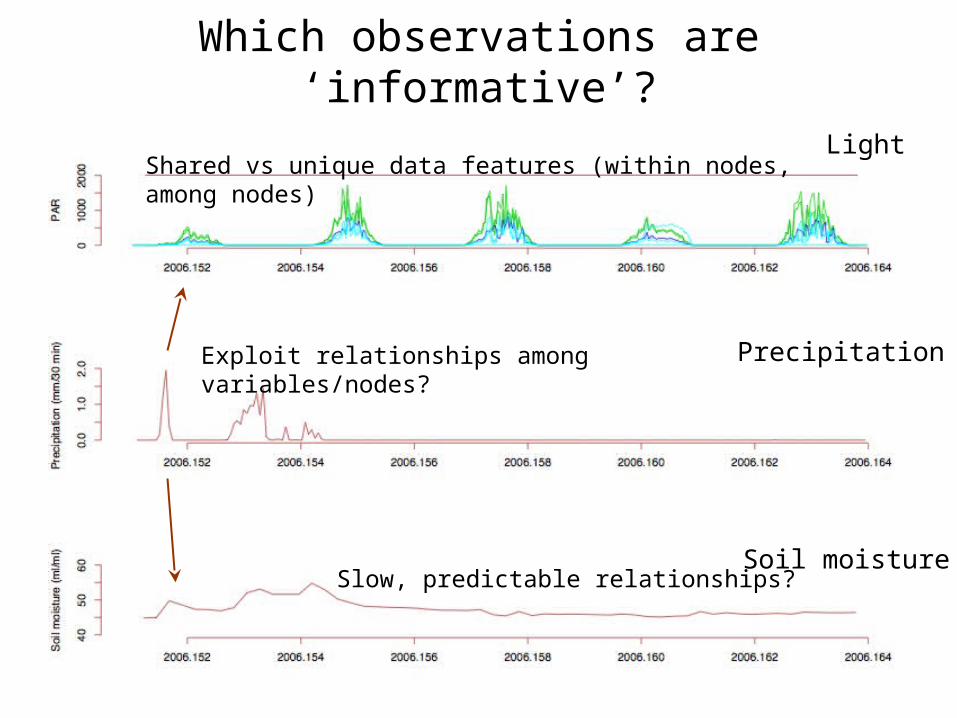
Which observations are ‘informative’?
Shared vs unique data features (within nodes, among nodes)
Exploit relationships among variables/nodes?
Slow, predictable relationships?
Light
Precipitation
Soil moisture
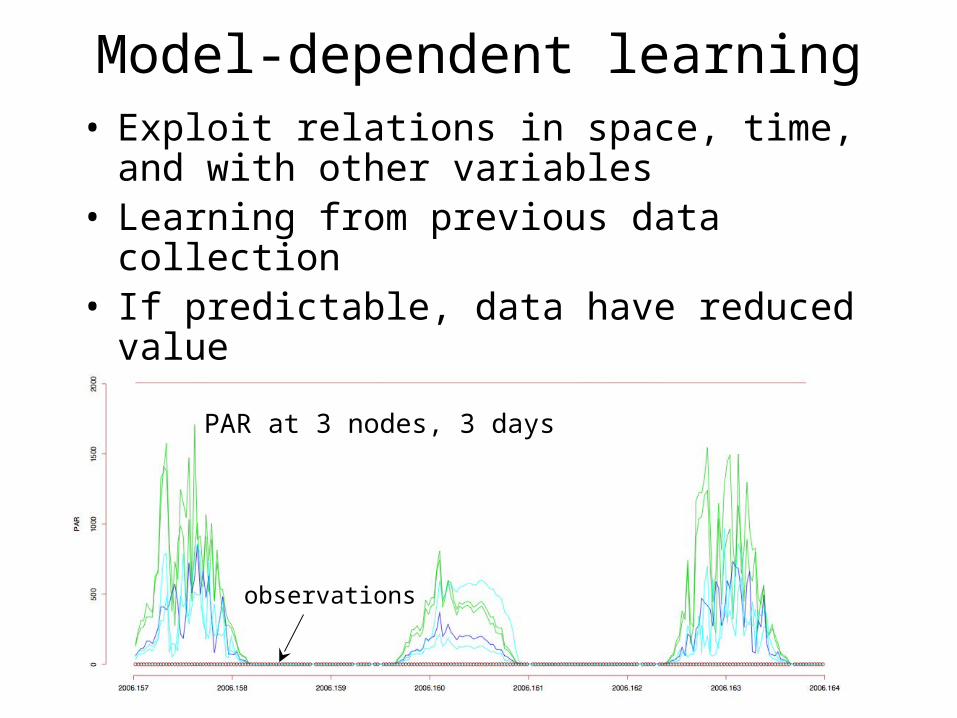
Model-dependent learning• Exploit relations in space, time, and
with other variables• Learning from previous data collection• If predictable, data have reduced value
PAR at 3 nodes, 3 days
observations
Controlling measurement with models
• Inferential modeling concerns– Some parameters ‘local’, some ‘global’ – Estimates of global parameters need
transmission– Data can’t arrive faster than model converges
• Simple rules for local control of transmission– Rely mostly on local variables– Periodic updating from out of network– ‘Transmit if you can’t predict’

In network data suppression
• An ‘acceptable error’, • A standard reactive model based on
change,
• Alternative: is the observation ‘predictable’,
€
zj,t −zj,t−1 <
€
zj,t − ′ zj,t{z} j ,{ ′ θ , ′ z MF ,z,w}t, M I <
{z}j local sensor data (no transmission){θ, z, w}t global data, periodically updated from full modelMF full, out-of-network modelMI simplified, in-network model

{y,E,Tr,D}t
Data
Calibration data (sparse!)
Process
Parameters
Hyperparameters
heterogeneity
Processparameters
€
wj,t
Location effects
time effectt-1
time effectt
time effectt+1 Measurement
errorsProcess
error
{y,E,Tr,D}t-1 {y,E,Tr,D}t+1
Out-of-network model is complex
Sensor data
zj,t
Soil moisture example
• Simulated process, parameters unknown
• Simulated data– TDR calibration, error known (sparse), – 5 sensors, error/drift unknown (dense, but unreliable),
• Out-of-network estimate process/parameters• Use estimates for in-network prediction• Transmit only when predictions exceed threshold
€
yt+1 = f yt, pt;θ( )et
t ~N 0,σ2
( )
€
ln wt( ) ~N ln yt( ),σw2
( )
€
ln zj,t( ) ~N ln yt( ) 1+δ j t−tj( )( ),σ z2
( )
δ j ~N 0,vδ( )
vδ ~IG s1,s2( )

Model summary
€
yt+1 = f yt , pt ;θ( )eεt
f yt , pt ;θ( ) = yt + pt − ET yt ;θ1,θ2( ) − D yt ;θ3( )
εt ~ N 0,σ ε2
( )
€
ln z j,t( ) ~ N ln yt( ) 1+δ j t − t j( )( ),σ z2
( )
δ j ~ N 0,vδ( )
vδ ~ IG s1,s2( )
ln wt( ) ~ N ln yt( ),σ w2
( )
Process:
Sensor j:Rand eff:
TDR calibration:
€
p y{ },θ, δ{ },σ2 ,σ z
2 z{ }, w{ }, p{ },σw2
( )Inference:
Back to node j:
€
′ θ , ′ δ j
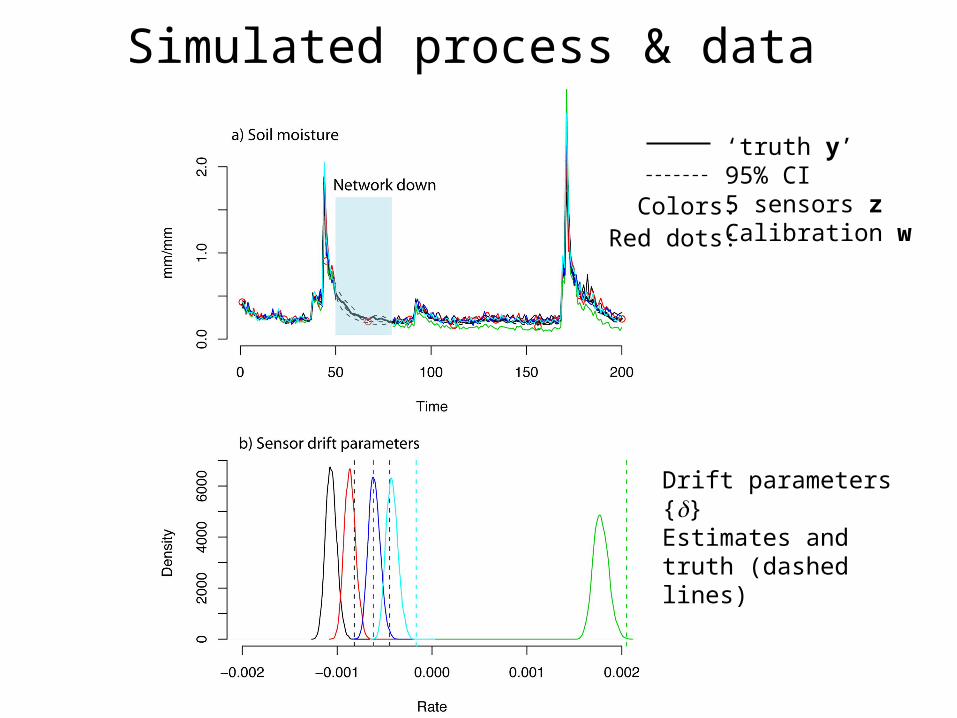
‘truth y’95% CI5 sensors zCalibration w
Colors:
Drift parameters {δ}Estimates and truth (dashed lines)
Red dots:
Simulated process & data
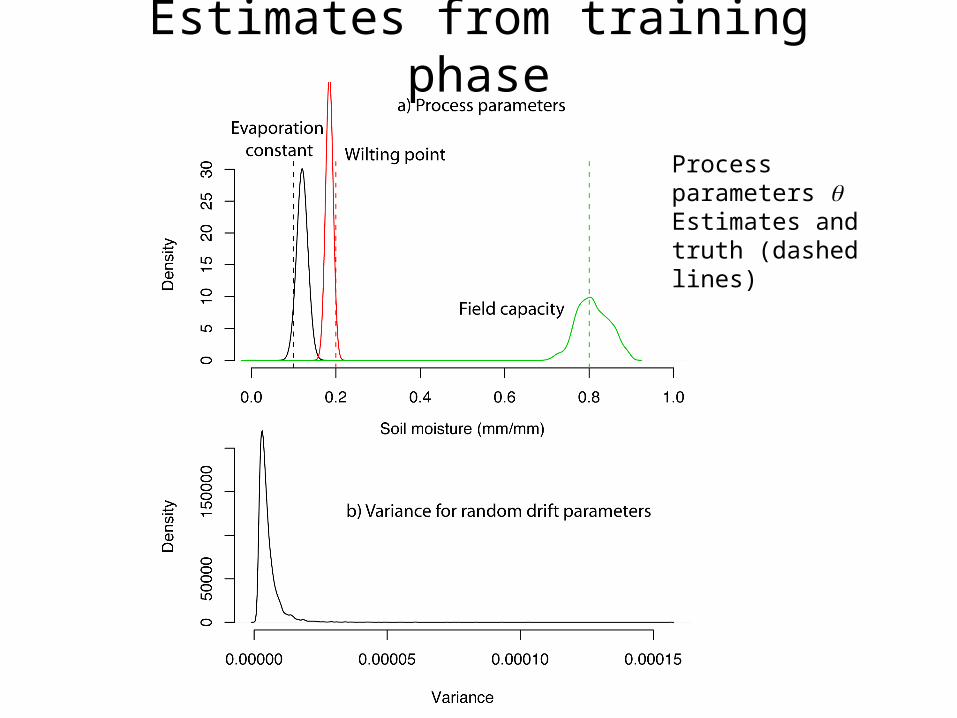
Process parameters θEstimates and truth (dashed lines)
Estimates from training phase
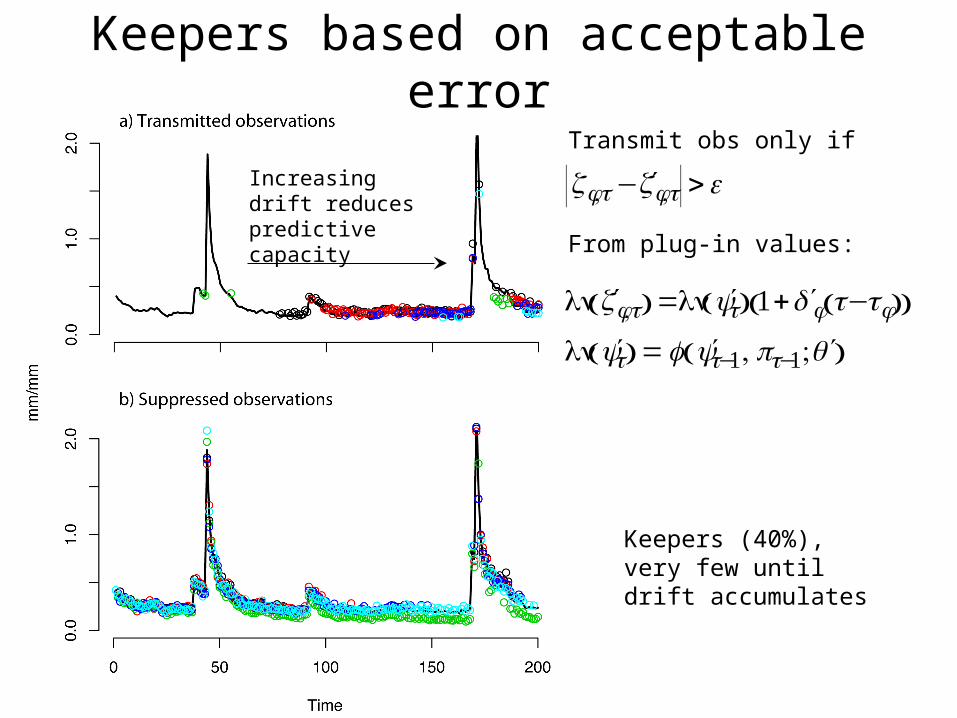
Keepers (40%), very few until drift accumulates
Increasing drift reduces predictive capacity
Keepers based on acceptable error
€
ln ′ zj,t( ) =ln ′ yt( ) 1+ ′ δ j t−t j( )( )
ln ′ yt( ) = f ′ yt−1, pt−1; ′ θ ( )
Transmit obs only if
€
zj,t − ′ zj,t >
From plug-in values:

Better ‘data’, few ‘observations’
‘truth y’95% CI5 sensors zCalibration w
Colors:Red dots:
€
p ln zj,t( ) yt, ′ zj,t,,...( )∝ N ln yt( ) 1+δ j t−tj( )( ),σ z2
( ) I ′ zj,t −( ) < zt < ′ zj,t +( )( )
Reanalysis model for missing data:
€
ln ′ zj,t( ) =ln ′ yt( ) 1+ ′ δ j t−tj( )( )
ln ′ yt( ) = f ′ yt−1, pt−1; ′ θ ( )
Known constraint on missing data

Additional variables
‘Collect or predict’
• Inferential ecosystem models: a currency for learning assessment
• In-network simplicity: point predictions based on local info, periodic out-of-network inputs
• Out-of-network predictive distributions for all variables (‘reanalysis’ step)
• A role for inference in data collection, not just data analysis
Advantages over ‘reactive’ data collection in wireless networks
• ‘Change’ in a variable is not directly linked to its information content– Example: all soil moisture sensors may
change at similar rates, making them largely redundant
• ‘Predictability’ emphasizes change that contains information
• The capacity to predict an observation summarizes its value and assures that it can be estimated to known precision in the reanalysis