Dynamic Analysis of Needle Roller Bearings on Torque Loss
11
J ournal of System Design and Dynamics Copyright © 2013 by JSME Dynamic Analysis of Needle Roller Bearings on Torque Loss Toyota Central R&D Labs., Inc. 41-1, Yokomichi, Nagakute, Aichi 480-1192 Japan E-mail: [email protected] JTEKT Corporation 1-1, Asahi-machi, Kariya, Aichi 448-8652 Japan Abstract Key words 1. Introduction * Vol. 7, No. 4, 2013 *Received 9 Aug., 2013 (No.T2-2012-JCR-0768) Japanese Original : Trans. Jpn. Soc. Mech. Eng., Vol.79, No.801, C (2013), pp.1386-1395 (Received 18 Oct., 2012) [DOI: 10.1299/jsdd.7.405] 405
Transcript of Dynamic Analysis of Needle Roller Bearings on Torque Loss

Journal of System Design and
Dynamics
Copyright © 2013 by JSME
Dynamic Analysis of Needle Roller Bearings onTorque Loss
������� ������� ����� ���������� ���� ��������� ������ ��������
��� ����� ������ ����
�� Toyota Central R&D Labs., Inc.
41-1, Yokomichi, Nagakute, Aichi 480-1192 Japan
E-mail: [email protected]��� JTEKT Corporation
1-1, Asahi-machi, Kariya, Aichi 448-8652 Japan
Abstract��������� ���������� ������ �� � � �� ��� ��� � � � �� ���� � ������ � �� ����
� ��� � �� ��� � ���� � ��� �� ����� � � ��� ��� � �� �� � �� �����
���� �� ������� � ��������� �� ���� �� ���� ���� �� �� � � ���� �� � �����
��� ���� � � ����� ����� �� �� ����������� � ���� ��� � � ������ �������
�� ������ � ���� � ��������� ������� ��� � �� �� ������ ������ ���� � � ��
�� ��� � ���� ���� ������ ������ ���� �� ���� ��� � ��� � ��� ����� ��
��� �� � ���� � �������� �� ������ �� ������ � �� �� �� ��� � �� ���
����� � ���� � ��� ��� � �� �� � � �� ������ ������� �� ������� �� ���� ������
����� �� �� �� ��� �� �� ������ �� �� � �� � � �� � ������ �� ������
� ������� �� �� �� � �� � ���� �� !� �� ����� � � �� � ��������� � ��
�� �� � ��� �� ����� ��� �� �� ��� �� �� � ��� � �� ����� � �� ��
�!��� ��� �� � ���� ������� �� � ������� �� �� �� ���� ��� �� � �� ����
������� �� ������ � �� ������ �� ����� �� ��� ���� � �� ��� � �� �� ���
� ����� �� �� �� ���� ���� �� ��� ���� � �� ��� �� � ������ ����� �� ����
�� ������ ���� �� � ����� � �� �� � ���� �� ���� � �� �� ����� ��� � �� �
�� �� �� � �� �� �� ��� �� "�� �� ���� �� ��� ���� � �� ��� �� �� �
����� �� �� �� � �� �� ������ ���� �� �� � ����
Key words # $ ���� %�� ��� & �� '����� (���� )�������� *������� "�����
�������
1. Introduction
��������� ���������� � �� � �� �� � �� �� �� ��� �� �� � �� �� ��
� ���� �������� �� ���������� ������ �� ������� � ������� ����� �� ���� ��� ��
����� ! ������ ��������� �� ������ �� ������ ���� �� � ������ ���� � �� � ���
��� ��� ���� ���� �� � ��� ��� � � � � �� � � � ��������� ��������� �� ���� � ��
������ ���� �� � ����� ������ ���� �� � �� �� ��� �������� ����� "��������� �� ��
� ��� �� � � ���� � � � ���� ��� � � ���� ��� � ������ �� ���� � ����� ��
��� � ���� �� �� ������ ��
+����� �� ��� � ���� � ��������� �� � � ��� ��� � � ���� ��������� � ���� ��
������ � �� � ���� �� ����� �� � ���� � �� �� �������� ������# ������ ���� �� ��
���� �� ������ �� �� ���� �� �� ����� ���� ����� � �� �� ����� ��� � �� �� ��
��� �, ������ ���� � �� �� ��� �� �� ���� �� �� �� � ������� ��� �� �� ����,
������ ���� � �� �� ��� � �� ��� ���� ���� �� � ������, �� ��� �������� �����
�� �� ����� ��� �� �� �� � �� � � ����� ����� �� �� �� �� �� �� ������ �� � ����
�� ��� ������ ����� -�� � � � ��� �� ����� � ��� ���� � � � � � ���� � �
��������� � �� ����� ��� �� �� �� �� .������ � ��� !� �� ����� � � �� �
*
Vol. 7, No. 4, 2013
*Received 9 Aug., 2013 (No.T2-2012-JCR-0768) Japanese Original : Trans. Jpn. Soc. Mech.
Eng., Vol.79, No.801, C (2013), pp.1386-1395 (Received 18 Oct., 2012)
[DOI: 10.1299/jsdd.7.405]
405

Journal of System Design and Dynamics
�� � ���� � ������ �� �� �� � �� �� ����� ��� ������� /��� � ����� �� 0� � ���� �
����� �� � ������� � � �� � �� �� � � ������� )�� � ��� � �� � � �� ���� � ����
�� � ���� �� �� � �� ����� ��� ���� ������� ����� ��������� ������� ��� ����� �
�� �� ��� ��� �� ������ �� ������ �� /������������� '� ���� ����� ����� �� ���
���� ������� � �� ���� ����� ������� � ���� �� �� � � � ��� � �� � �� �� �� �
�� �� � � � �����
. �� � ������� �� � � ���� ����� �� �� ��� ��� � ������ �������� ����� ��� �
�� ��������� �� �� �� ���� ����� ����� �� �� ��� � ���� ���� ��� ��� � ��
� ���� �� ������ ����� �� � �� ��� �� �1� � � �� �� ��� ��������
�� �� ��� ��� � ��� �� ������ ������ �� �� � ����� �� �� ������ ��������� ��
������� � ���� �� � � ��������� ������� ��� � ���� � � �� � �� ���� ��������� �
��������� �� ������ �� ������ �� ��� ��� �� �� � ��� � � � ��� �� � �� ��
����� � ���� � ������ �� ������ ����� � ���� � ��� ��� ����� �� �� � � �� ���
���� ������� �� !� �� ���� ����������� � � �� ��� � � ������ �� �� � �� � �� �
��� � � !� �� ����� � � �� � ����� �� �� ��������� � �� �� �� � ��� ��
�� ����� ��� ����� ��� ��������� �� �� �� ���� ����� �� !� �� ��� �� � ���
�� ��� � � !��� � �� ��� ��� �� � ��� � ����� ��� �� �� ��� � �� ����
����� �� ��������� ������� ��� � �� �� � �� �� ������ �� �� ���� ����� ����� ��
�� ��� � �� � �� �� �� � � �������
2. Numerical Method
�� �� ���� ���������� �� � � ���� ����� ����� �� ������� �� ��� ��� � ���
�� � �� ��� � �� �� ������ �� �� ������ �� ������ ���� � � �� ��� ���� �
��� ������ ������� �� ������ � ���� �� ��������� ������� ������ + ��*� ���
'�����$������� �� �� ���� ��� � �� �� �� ���� ���� � � � � ���� � � ��
�������� � ������
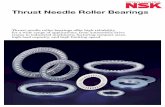
2.1. Object System and Numerical Model'��� 2 ����� � �� �� � �� �� +���� ��! ��� ��� � �� �� � � � ���������
���������� �� +���� ��! ��� ��� � � � � ������� �� ��� �� � �� �� ������ ��
���� ������ � ��� �� � �� � ����� �� ����� � ����� � � � �� � � � ����� �� ��
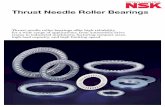
�� ��� � ��� ���� ������� �� ����� '��� 3 ����� � ��������� ������� ��� � ��
� �� ��� � ���� ������� �� ������� ����� �� ��� � ������� �� �� �� ��
��� �� � ��� ��� ����� � ���� ���� ���� �� �� ��� �� � � ���� ����� ���� ���� �� ��
� �� � �� ��� ��� ���� � ����� � � �� �� ��� ��� ��� �� �� ����� ��� ��
����� �� � � � �� ���� ���� ��
Short pinion
Sun gear
Pinion shaft
Ring gearNeedle roller
Pinion
Cage assemblyωp
ωs
Fg
Fg
Revolution axis of pinion (ωs)
Rotation axis of pinion (ωp)
Mg
Ring gear
Short pinion
Pinion
Sun gear
CarrierRear sun gear (Idling)
���� � ������ ��� � ���
Vol. 7, No. 4, 2013
406

Journal of System Design and Dynamics
Side washer
Pinion shaft (inner race)
Needle roller (n=12)
Pinion (outer race)
Side washer
Cage assembly
���� � �������� � ����� ����
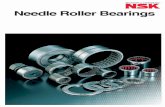
2.2. Numerical Model of Contact and Friction Forces������� �� �� ������ � �� �� �� ��� � �� ��� ���� �� ��� � � � ���� �
��� ��� ������ 4��� �� ��� �� ��������� �� ������ ������� ��� � �� ���� �
'��� 5� �� ������� ��� � � �� � �� � � ������ ���� � �� � �� ��� �� ��
��� ����� �� �� ����� �� ������ � �� �� �� ��� �� �� ���� ����� �����
�� �� ������ �� ������ � � '��� 67�8� /��� � ������ � ��� �� � ������ ��� ���� ��
�!�� �� �� �� ��� � � ������ �������� �� ���� � �� �� ��� ��� � �� � ����
�� �� ��������� ���� �� ���� � �� �� �� ���� � '��� 67�8� �� ���� � ��� ��� �
�� !� �� ��� ���� ����������� ���� ������� ��� �� ���� ��� � ��� �� ������� � ��
���� � ������ ����� � ���� ���� �� � ����� ����� ����� ����� �� � ����� � ���� ����
�������� � �� � � �� ������ �� ���� �� ����� � �� ��� ����� ������ �� �������� � � '���
67�8� � ��� ����� �� ����� � � ���� ������ ����������� �� � � ��� � �� ��������
������������ ���� �� ���� � ���� � � �� ������� ����� � �� ��� ����� � ������
�� ��� �� ��� � � � �� � �� ������������ ���� �� �������� - � �� ���
�� � � �� � �� ���� � ������ ����� ����� � ������ ���������� ��� � ��� ���� ��
������ ��� � ��� ���� �� ����� � �� � �� �� �� �� �� �� ��� �
Pinion
Cage
Side washer
Contact & friction model
Needle roller
Pinion shaft
(c)
(a)
(b)
(f)
(g)
(a)
(c)
(d)
(h)
(e)
Discrete spheres
���� � ������ �� ������� ����
Line contact Tilt Skew
Contact force
Pinion shaft
Needle roller
Line contact Tilt Skew
Contact force
(a) Discrete sphere model (proposed method) (b) Cylinder model (conventional method)
���� � ���� ������������ ��� ������ �����
Vol. 7, No. 4, 2013
407

Journal of System Design and Dynamics
�� ������ ��� � �� �� �� ������ ��� � �� ��� � �� ������ ������ �� ������
��� � �� � !� �� � � � �� �� �� ������ ���� �� � �� �� ������ � ������� Æ �� 4��
728�
�� � �� 728
%���� 9� ���� �� � ���� �� ������ � ������� Æ �� �� ����������� �� �� � �� �
�� ������ ���� �� � �� !�� ���� ���� �� 4������ 738 !� �� � �� ������ � �������
Æ � � �� �� �� ��� �� ��� � ��� �� ������ ��� ��� �� �� � ��� �� �� �� ���
��
Æ � 5�: � 2;�� � 7�� ��8������� 738
�� ���� � � � ������ � � 4�� 758 �� � � 2;�< � � �� � �� ������ 4�� 738�
� � :�2= � 2;� � ������ 758
�� ������ ��� �� �� �������� � ������������ �� ������ ��� �� �� �� ������ �� �� �
�� �� � ���� �� � �� � ���� � ��� �
�� � � �� 768
�� ������ �������� �� ��� ����� �� � � � � ���� 2� �� ������ �� ��
�� ��� � � �� ����� �� ���� ������ � �� ���� � ��� ��� �� �� ��� � �� � �
�� ������ ����� 7�8 �� 7 8 � '��� 5 � �� ��� ��� �� �� ������ � ���� �����
�� �� ����� �� �� ����� � ���� �� �� � �� �� ������ ���� 7�8 � �� �!��� �� �����
- � �� �� � � �� �� �� �� �� ��� � � ����� � � >�/ $ 2=;?� �� ��� � � ��
�������� �� ������ ����� 7�8 �� 7�8 � ��� � � �� �� ������ � ���� ���� �����
����� � � ���� � ���� �
���� � ������ ��������
���� � ���� � ������ ������� ����� �������
����� ���� �! "#$� % � ���� &
��� �! "#$� % � ���� �! � ���� % � ����
"$��� �! "#$� % � ���� &
���� ��� �! "#$� % � ���� &
'��$� & �! ������ ����$
��� "$��� ! "#$� % � ���� &
'��$� & $! ������ ����$
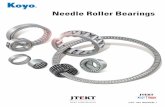
2.3. Definition of Friction Coefficient�� ������ �� �� � �� � � �� � ������ �� �� ���� �������� �� ���� � '��� =�
�� ������ �� !� �� � � 4�� 7=8� �� ���� ���� �� ����� � �� ������� �� ������ � ������
�� �� �� ��� � � �� �!��� �� ���� �� �� ������ ���� �� � �� �� ��� �� ��
Slip ratio V/Vr
Fric
tion
coef
ficie
ntμ
0 0.02 0.04
μ d
Transition velocityVd/Vr
���� ( ������ ��) ������� ����� �� ���# �����
Vol. 7, No. 4, 2013
408

Journal of System Design and Dynamics
���� � '��� ?� �� � ���� ��� � �� ������ ������ �� �� � �� �� �� �������
� ������ ���
� �
���������
���
������
� ��
���
��
�7; � � � ��8
�� 7�� � �87=8
Skew angle
Pinion shaft
Needle roller
Thrust force
Sliding velocity V Cage
Rotation speed ωr (Circumferential speed Vr)
���� * "�$����� �� �� ����� �����
�� ������ ������ �� �� � �� �� �1� � � �� ����� ���� ��� � ��� � ����
����� �� � �� ���������� �� �� �� � �� ��� �� �� ���� �� �� ������ ������ ��
�������� �� ��! � ��������� � � ��������� ��������� ���� � ���� ��� � � �� !�
� �� ��� ����� �� �� ����� ��� �� �� ��� � �� �� � ��� ���� � � � � ��
� � �� ��� �� �������� � � '��� @� � ��� ����� �� ������� � ������ �� �� � � �� �����
��� �� ��������� � �� �� �� � ��� �� �� ����� ��� � '��� @� �� ����� � ���� ��
!� �� ��� ����� ��� /����� �� 0� � ������� �� ����� �� � ����� �� �� ���� �����
�� �� ���� � �� ��������� �������� � � '��� ?� �� ������� � ������ �� �� � � �� �
�� !� �� �� ������� ��� �� ����� �� ����� ��� � ��� � ������ �� � �� � ��� ��
2�: � � � �� ���� � '��� :� ���� � ���� ��� � ��������� �� �� ������ ������ ����� ��
�� �� ��� ��
Skew angle [deg]
Nor
mal
ized
thru
st fo
rce Experiment 2: Ulezelski (8)
Experiment 1: Soda (7)
0 1 2 3
1
Numerical analysis Transition angle
���� + ������ ��) �$���� ���� �� �,) ���
Skew angle [deg] 0 1 2
Transition angleSlip
ratio
V/V
r
0.02
0.04 Transition velocity Vd/Vr
Numerical analysis
���� - ������ ��) ���# ����� �� �,) ���
Vol. 7, No. 4, 2013
409

Journal of System Design and Dynamics
2.4. Conditions for Numerical Analysis�� ������ �������� � � � �� ������� �� ������ ����� �� � ����� �� ���� �����
�� ��� ���� � � �� �� � �� ! � A��������� � ���� ������� �� � �� ��� �������� �
� '��� 2� �� ����� � �� �� ���� ������ �� ���� ���� � ���� �� ���� ����� ������ ��
��� �� �� ��� �� �� ���� ���� � ���� �� ���� ����� �� �� �� � ��� �� ���
�� ������� � � �� �� ���� ����� �� �� ���� �� �� �� �� ������ � � �� �� �� �
�� ���� � '��� 5� ����� �� ��� ���� � �� ���� �� �� � �� �� ���� ���� �� ����
������ �� ���� � ���� �� ���� ����� �� �� ���� ���� �� �� � ��
�� ���� �������� � �� �������� �� ������ � �� ��� � �� �������� � � '��� 2 �
���� � � �� ���� � �� ���� �� ���� �� �� � ����� � � ����� �� �� �� ���� �� ��
� �� ��� � �� ��� � �� ��� ��� �� �� ���� �� ���� � '��� 2� � ���� ��� � �� �����
�� ����� � ! � �� �� ����� ����� �� �� � ���
3. Validation of Numerical Method
�� !� �� ��� � ��� � '��� < �� �� � �� � ��� �� �!��� ��� � ����� � �� ���
�� � �� ��� �� �� ���� � �� �� � �� ��� � ��� �� �� �� ����� � �� ��� ��� ��
�� ��� � ��� �� ��� �� ���� � �� � �� � �� � 5:6: B��C� 0� �� � ���������
�� �!��� ��� � �� � �� �� �� � �� �� �� ��� � �� � ��� � �� ���� ���� �� ���
���� �� � �� �� �� � ������� ��� �� ��� � � �� !� �� ��
ωp
Fgr
Axialforce
Mg
Case
Outer race
Shaft
Needle roller bearing
Strain gauge
���� . ������� �� ����� ����
'��� 2; � ���� � �� �� ���� �� !� �� ��� ����� �� �� �!��� ��� � �������
�� �� ���� � �� ����� ��� � ) ��� � �� � � ��� � �� ��� �� ���� �� ���� � ��
�� �� �� �� �� �� � ��� � ��� �� �!��� ��� � � ������ � �� �� ��!���� �!���
��� � �� ��� ����� ����� '��� 2; ����� ���� �� �� ���� � ���� ��� � �� �� � ����
�� �!��� ��� �� �� ���� �� �� ����� ��� ��� ��� ��
Nor
mal
ized
axi
al fo
rce
Radial force [N]
0
0.5
1
2000 4000
Experiment
Simulation
���� �/ ���#����� �� �#������ �� ������� ������
Vol. 7, No. 4, 2013
410

Journal of System Design and Dynamics
4. Numerical Examination
� ���� ��� � �� �� ��� � �� �� �� ��� � ���� � !��� � �� �� � �����
�� �� �� ������ ������ �� �� �� ��� �� '��� 22 �������� � �� ���� � �� ��
����� �� ��� � �� �� ��� ���� � �� ��� � �� �� ��� �� �� ��� �� �� �
������ ��� �� �� ��� ���� � ���� � '��� 22� �� �� ��� �� � � �� � ����� ���
� �� ����� �� �������� �� �� ����� ������ �� �� � ����� � �� �� ���� �� �� � @;6:
B��C �� �� � <=2= B��C� � � � � �� ��� �� �� � 3�3@ B��C �� � � �� �� ����� ��
��� ������� !� �� �� �� �� ��� �� � �������
Radial clearance: CR
Cage pocket clearance: CT
Pinion
Pinion shaft
Cage
Needle roller Contact angle:
70 [deg]
������� ������ 0��1
�� (2 �/2 �/2 �/
�� �/2 ��/2 ��/2 ��/
���� �� 3���� �������
4.1. Relationship between Friction Torque and Axial force'��� � 23 �� 25 ���� �� �� ���� ����� !� �� � �� ��� ��� ���� �� �� ����
��� ���� �� �� �!��� ��� �� �� ���� �� �� ��� ���� � �� ��� � ��� �� ��
����� �� ��� �� � �� ������ �� � 2;B��C� �� ������ ���� �� �������� � �� ��
����� ���� �� �� ����� �� �!��� ��� �� �� ���� �� �� ������ ��� �� 7�8 � '��� 5�
'��� 23 ����� ���� �� ������ ���� � � �� � �� �� �� ��� � � � �� �� �� �!���
��� � ���� � � �� � ������� ���� �� �� ��� � �� ���� � '��� 25� � ���������
��� � 5;B��C� �� �!��� ��� � ��� � � � �� ���� ��� . �� ��� ����� �� �!��� ��� �
�� �� ��� �� �� ��� ���� � �� ������ ���� 7�8 � '��� 5 � ����� ���� �� �� �!���
��� �� �� �����
5 ms
Fric
tion
torq
ue [N
m]
0
0.8
0.4
Time [ms]
330
230
CT = 30 [μm]
130
CR = 10 [μm]
���� �� 4������� ������ ��� �#�� �� ������� ���5� � ��� #��,� ������
0
Axi
al fo
rce
[N]
60
120
130
330
230
CT = 30 [μm]
5 ms Time [ms]
CR = 10 [μm]
���� �� 4������� ������ ��� �#�� �� ����� ���� � ��� #��,� ������
Vol. 7, No. 4, 2013
411

Journal of System Design and Dynamics
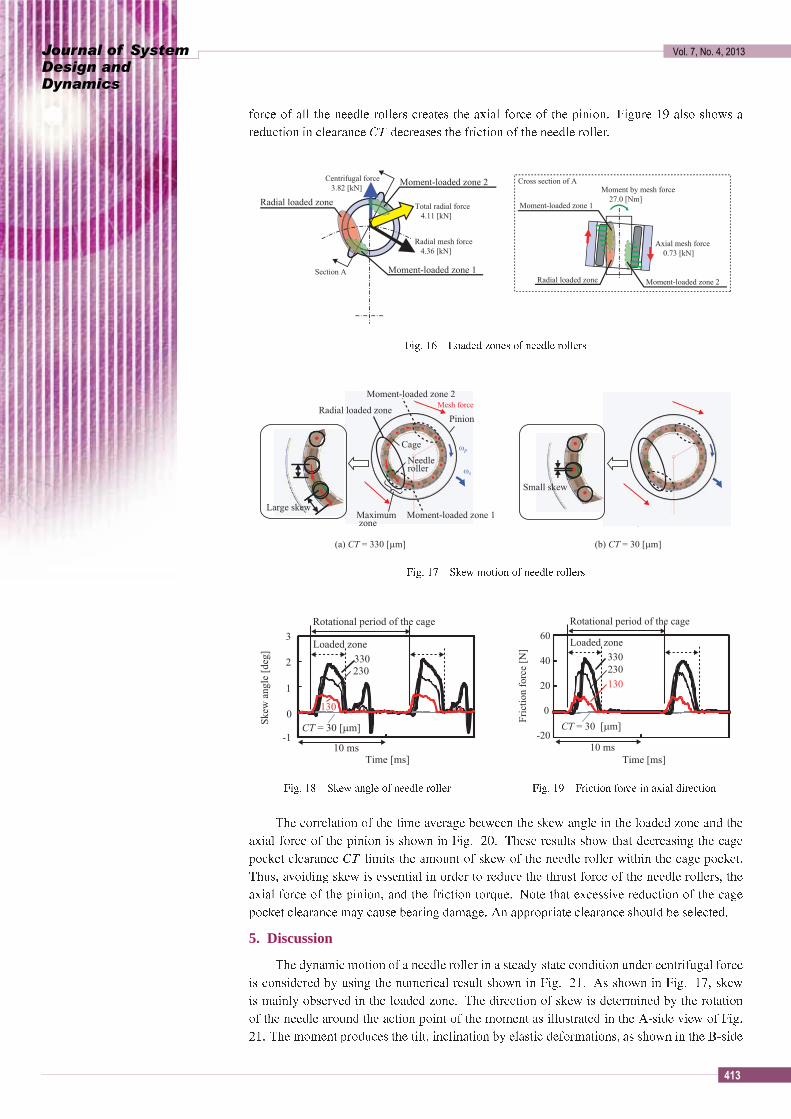
'��� 26 ����� �� �� �� ������ ���� �� ��� �������� �� �� �� ��� �� ��
����� �� �� � !�������� �� � ���� �� ��� ���� � �� ��� � ��� � ���� ���
� �� ��� �� ����� �� ��� � '��� 2= ����� �� ��������� � �� �� �� ��
������ ���� �� �� �� �� �!��� ��� � �� � ��� ������ � �� ��� �, ���� ����� ��
�!��� ��� �� � � ���� ��� �� � � �� �� ������ ���� �
CR = 5 [μm]
Fric
tion
torq
ue [N
m]
Cage pocket clearance CT [μm]
0.2
0.4
0 200 400
CR = 10CR = 20
CR = 30
���� �� ������ ��) ������� ���5� �� ����� �������
0
0.4
0.2
Axial force [N]
60 120
CT [μm]□ 330 ○ 230
130 × 30
Fric
tion
torq
ue [N
m]
���� �( ������ ��) ������� ���5� �� ����� ���� �� #���
4.2. Correlation between Skew and Thrust Force�� � ���� �� ����� ��� � �� � ���� �1� � � �� �� ����� �� �� � �� ��
�� ��� ����� � ���� � ����� �� ������� �� �� ��� � � ������ � �� � �� ��
�� ����� � �� �� ��� ���� � �� ��� �� �� �� � ��� � �� � �� ���������
� �� �� �� � �� �� ����� ��� �� ������� ��
'� ���� �� �������� �� �� �� � �� �� �� �� ���� � �� �� �� � ��� �� ���� �
� '��� 2?� �� ����� ����� ��� �� � �� � �� �� � � � �� ��� �� �� ������� �� ��
����� ���� ��� ��� � �� ����� ���� � �� �� ���� � '��� 2?� �� ��� � ����� �
�� � �� ��� � ����� � ��� ��� � ��� ������ � �� �� �� ��� ������ � �� 2 ��
������ ��� ���� �� ����� ���� � �� � ���� � � � ��� � �� ��!���� ���� � �� �
'��� 2@ ����� �� �� � ����� �� �� �� ��� � ����� � �� �� ���� ����� ��
'��� � 2@ 7�8 �� 7�8 ���� �� ����� �� �� � �� �� � ��� �� �� �� ���� ��� �� �����
�� ��� � � � �� ���� ��� �� � ����� � ������ ���� �� ��� �� ��� �� �� � ��
�� � ��� � �� �� � ��� � ��� � ��� �� �� �� ��� ����� � �� �� ��!����
���� � �� � '��� 2: ����� �� ��� ��� ���� �� ��� � �� � ��� �� �� �� � ���
�� �� �� ��� �� � �� �� ��� �� ����� � � �� ���� � �� � � �������� �� �� �
��� �� �� � � ������� ���� �� �� ��� � � /������ ������ �� ������ ��� �� ��
�� ��� �� ������ ���� 7�8 � '��� 5 �� �� � �� ���� � '��� 2<� �� ������ ������
Vol. 7, No. 4, 2013
412
Journal of System Design and Dynamics
��� �� ��� �� �� ��� � � �� � �� �!��� ��� �� �� ����� '��� 2< ���� ����� �
������ � �� ��� � � � �� � �� ������ �� �� �� ��� �
Centrifugal force 3.82 [kN]
Radial mesh force 4.36 [kN]
Total radial force 4.11 [kN]
Radial loaded zone
Axial mesh force 0.73 [kN]
Moment by mesh force 27.0 [Nm]
Section A
Cross section of A
Moment-loaded zone 1
Moment-loaded zone 2
Radial loaded zone Moment-loaded zone 2
Moment-loaded zone 1
���� �* ����� 6�� �� �� ������
(a) CT = 330 [μm]
Maximum zone
Moment-loaded zone 2
Moment-loaded zone 1
Radial loaded zone
Large skew
Mesh force
Pinion
Cage
Needle roller
ωp
ωs
Small skew
(b) CT = 30 [μm]
���� �+ ",) ����� �� �� ������
Skew
ang
le [d
eg]
0
2
-1
1
3
Time [ms]
330 230
CT = 30 [μm]
130
10 ms
Loaded zone
Rotational period of the cage
���� �- ",) ��� �� �� �����
Loaded zone
Time [ms]
Fric
tion
forc
e [N
]
0
-20
40
20
CT = 30 [μm]
330 230 130
10 ms
Rotational period of the cage 60
���� �. ������� ���� � ����� �������
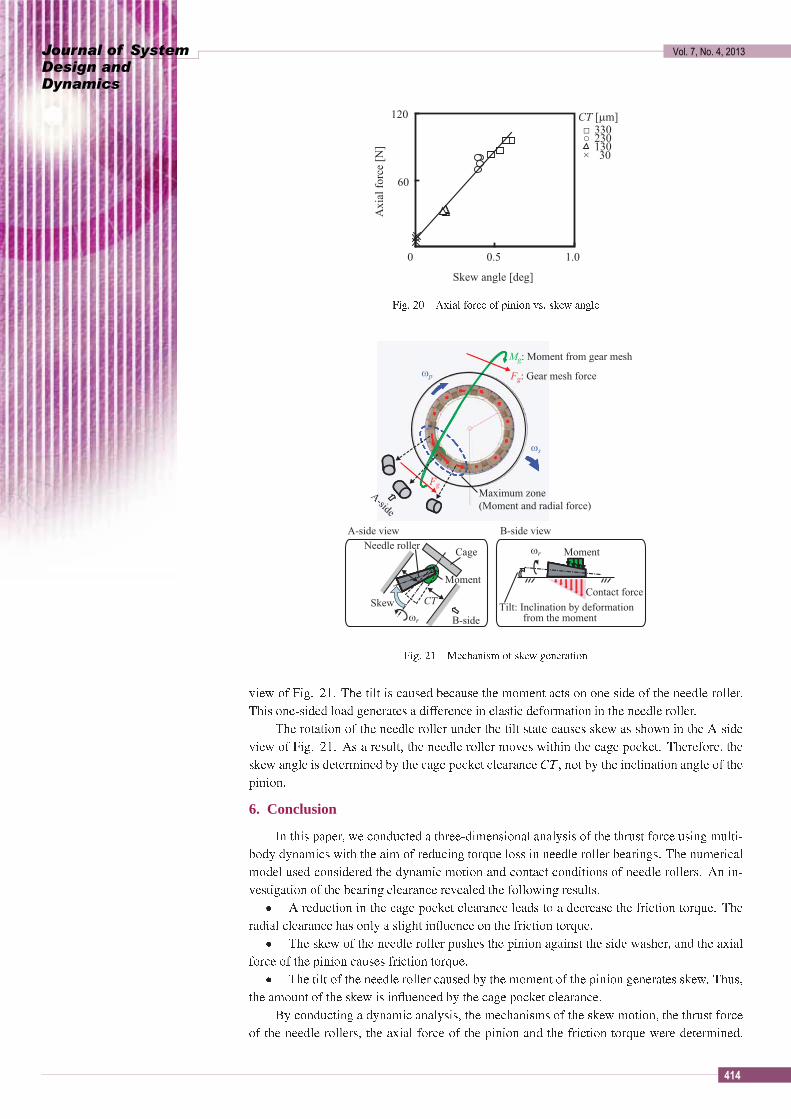
�� �� ����� �� �� ��� �� �� � �� �� �� � ��� � �� ���� � �� �� ��
�!��� ��� �� �� ���� �� ���� � '��� 3;� �� � ����� ���� ���� � � ���� �� ���
���� � �� ��� � ������ �� ����� �� �� � �� �� �� ��� ����� �� ��� ���� ��
����� ������� �� � �� �� ���� � �� �� ��� �� ����� ��� �� �� �� ��� �� ��
�!��� ��� �� �� ����� �� �� ������ ���� � ��� ���� !� ���� ������ �� �� ���
���� � �� ��� ��� ���� � ��� ����� � � �������� �� ��� ������ � � � �� ��
5. Discussion
�� ������ ����� �� � �� ��� � � �� �������� ������� �� � ������� ���
�� ����� � �� ���� �� �� ���� ���� ���� � '��� 32� �� ���� � '��� 2@� �� �
�� ����� ��� � � � �� ���� � �� � �� �� ���� �� �� � �� � � �� � �� �� ������
�� �� �� ���� �� ����� ���� �� �� ��� � �� �������� � � �� ����� �� � �� '���
32� �� ��� � ����� � �� ����� �������� �� ������ � ��������� �� ���� � �� $����
Vol. 7, No. 4, 2013
413
Journal of System Design and Dynamics
Skew angle [deg]
0 1.0
Axi
al fo
rce
[N]
60
120
0.5
□ 330 ○ 230
130 × 30
CT [μm]
���� �/ ����� ���� �� #��� 7�� �,) ���
Moment
A-side
B-side
Maximum zone(Moment and radial force)
A-side view B-side view
Moment
ωp
ωs
Fg: Gear mesh force
Mg: Moment from gear mesh
Fg
Cage
Skew Tilt: Inclination by deformation from the moment
ωr
ωr
Contact force
Needle roller
CT
���� �� ��$���� �� �,) ������
�� � �� '��� 32� �� ���� �� ���� � � ���� �� ��� � ���� � � ��� �� �� �� ��� �
���� � ���� � ���� � �� � � ��� � � ������ � ������� � �� �� ��� �
�� ������ �� �� �� ��� �� �� ���� ���� ���� � �� � �� ���� � �� �����
�� � �� '��� 32� �� � ����� �� �� ��� ��� � ����� �� ��� ���� �� �� �� � ��
�� � ��� �� � � �� � �� �� ��� ���� � �� ��� � � �� �� �� �������� ��� �� ��
�����
6. Conclusion
� ���� ��� � � ������ � � �� ���� ����� ������� �� �� ����� ��� ���� ������
���� ������� ���� �� ��� �� ����� ���� ���� � �� ��� � ����� �� �� ����
��� � �� � ����� � �� ������ ����� �� ������ �������� �� �� ��� �� � ��
� �������� �� �� � ��� �� ��� � �� � �� �������� ������
� � ������ � �� ��� ���� � �� ��� � ��� �� � � � �� �� ������ ���� � ��
����� �� ��� ��� ��� � ������ �1� � � �� ������ ���� �
� �� �� � �� �� �� ��� ���� � �� ���� ������ �� ��� ���� � �� �� �!���
��� �� �� ���� ���� � ������ ���� �
� �� ���� �� �� �� ��� ���� � �� �� ��� � �� �� ���� � �� � �� �� �����
�� ����� �� �� �� � �� �1� � � �� �� ��� ���� � �� ��� �
$� �������� � ������ �������� �� � ������� �� �� �� � ������ �� ����� ���
�� �� �� ��� �� �� �!��� ��� �� �� ���� �� �� ������ ���� � � � �� ��
Vol. 7, No. 4, 2013
414

Journal of System Design and Dynamics
�� ��� ������ � ���� �� ��� ���� � �� ��� �� �� � �� ����� �� ������� �� � � ��
������ ���� �� �� ����� �� ��� ������ � ��� � � / ���� 2 ���� � �� ������ � �
���� ����� �� � ��������� �� �� ���� ������� ����� �� �� ������� �� �� ��� ���
� � ���� � �� �� � ���� � � ����� �� �� � ��� ���� � ������ �� � ����� �������
�� �� ���� ���
References
7 2 8 D������� )�� � ������ � � �� $ ��� �� ��������� *�� ���� � � ���������
��� � ������ ��� 2?6 73;;58� ��� 2<�35�
7 3 8 ������ ��� D����� )�� ������� ��� *���� D�� ��������� ��� �� /���� ��� (��� �������
�� %�� ��� & �� �� .� ���� "�������� �� �������� � ���� ������ ������
�� ����!� ��� 3:�23 73;238� ��� @�23�
7 5 8 0������ /�� (��� >�� �� )��������� E�� * � ���� � �� 0��������/� � %�� ���
� �� +��� $ ����� ��� ���"����� � ������ ��� ?:; 73;;?8� ��� 5?�62�
7 6 8 ��� ���� -� �� D������� D�� * � ���� � �� )����� "�� �� +��� � �� %�� �
��� & �� ���� -��� /� � +������� �� �������� � ���� ������ ������ ���#���!�
��� 2==�2; 73;2;8� ��� 2�6�
7 = 8 0������ ��� .������� >�� �� D�� ���� )�� *����� "����� ������ �� � �� +���
$ ���� 738� � ����� � �� �� � ���#� � $�%����#� � ���������� F��� :� ��� ? 72<?58�
��� 6;5 �62;�
7 ? 8 .������� >� �� D�� ���� )�� *����� "����� ������ �� � �� +��� $ ���� 758�
� ����� � �� �� � ���#� � $�%����#� � ���������� F��� <� ��� = 72<?68� ��� 5?2�5?:�
7 @ 8 /���� �� �� '�������� D�� '���� ��� /���� �� '������� ���� �� ����� '��
"��� � �� /� � � +��� � � � �� +��� $ ����� � ����� � �� �� � ���#� � $��
%����#� � ���������� F��� 2?� ��� 5 72<@28� ��� 2<?�3;<�
7 : 8 0� � ����� >� "�� 4���� *� &�� -���� +� >�� �� )������ >� *�� � �� $ ��� �!���
����� /����� ��� ���"����� �� ���� ��� :5;=?: 72<:58�
7 < 8 )��� -�� )������� ��� )������� D�� D����� ��� �� /������� )�� ����� '�� �
"��� � �� /� � � +��� � � � �� +��� $ ����� ���� � �������� � � #� � ���
� &�� ���������� �� ���'() 72<<68� ��� 2?= �2?:�
72;8 /��������� ��� *����� ������� �� � �� +��� $ ���� 0� %�� ��� )�����
��� ���"����� �*��&� ��� @= 73;;@8� ��� <6�<<�
7228 /������ -�� )�������� ��� )������� E�� ���� E�� �� D��������� ��� ����� '��
������� �� ����� "����� F ������ >��� 0��� )�������� )�� �� � ����� � ���#��
+����� ��� +�������� F��� 5� ��� ? 73;;<8� ��� <@=�<:=�
7238 '�����$�� D�D�� + ��*� + � � )���� 7��� 8� �������� ���
�����#����������������������A����������������� 7��� �� � 3;23�?�3;8�
Vol. 7, No. 4, 2013
415