
Dual Prediction-based Reporting for Object Tracking Sensor Networks Yingqi Xu, Julian Winter,...
30
Dual Prediction- based Reporting for Object Tracking Sensor Networks Yingqi Xu, Julian Winter, Wang-Chien Lee Department of Computer Science and Engineering, Pennsy lvania State University International Conference on Mobile a nd Ubiquitous Systems: System and Se rvices (MobiQuitous 2004) Speaker: Hao-Chun Sun
-
Upload
roderick-fitzgerald -
Category
Documents
-
view
214 -
download
0
Transcript of Dual Prediction-based Reporting for Object Tracking Sensor Networks Yingqi Xu, Julian Winter,...

Dual Prediction-based Reporting for Object Tracking Sensor Networks
Yingqi Xu, Julian Winter, Wang-Chien LeeDepartment of Computer Science and Engineering, Pennsylvania State U
niversity
International Conference on Mobile and Ubiquitous Systems: System and Services (MobiQu
itous 2004)
Speaker: Hao-Chun Sun
Outline
Introduction Related Work Dual Prediction Based Reporting Performance Evaluation Conclusion

Introduction -background-
Object Tracking Sensor Network (OTSN)Energy conservation is the most critical issue.
Monitoring Reporting
OTSN
Base Station
T seconds
Introduction -background-
Object Tracking Sensor Network (OTSN)Sensor Fusion Problem
Deciding the states of the tracked objects may need several sensor nodes to work together.
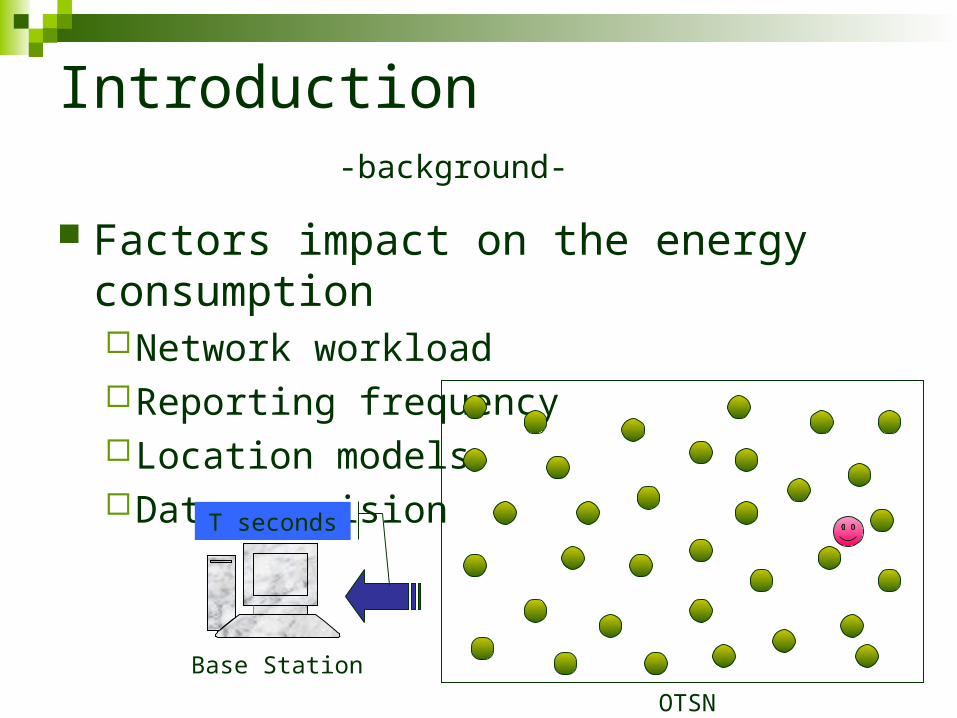
Introduction -background-
Factors impact on the energy consumptionNetwork workloadReporting frequencyLocation modelsData precision
OTSN
Base Station
T seconds

Related Work -PES-
Prediction-based Strategies for Energy Saving in Object Tracking Sensor Networks (IEEE MDM 2004)
RF Radio
Sensor MCU
Sensor Node
OTSN
Base Station
T seconds
Related Work -PES-
Basic monitoring schemes Naïve
Space: All sensor nodes Time: All time
Scheduled Monitoring (SM) Space: All sensor nodes Time: activated for X (s), sleep for (T-X) (s)
Continuous Monitoring (CM) Space: One sensor node Time: All time

Related Work -PES-
Base Station
Monitored region
SM
Related Work -PES-
Base Station
Monitored region
SM

Related Work -PES-
Base Station
Monitored region
CM

Related Work -PES-
Monitoring Solution Space
IdealScheme
Energy consu
mption decre
ases
Missing ra
te incre
ases
NaiveSM
CM
Number of Nodes
Sampling Frequency
1
S
LowestFrequency(=1)
HighestFrequency(=T/X)
Legend
Basic schemes
Possible schemes
Legend
Basic schemes
Possible schemes

Related Work -PES-
Prediction Model— Heuristics INSTANT
Current node assumes that moving objects will stay in the current speed and direction for the next (T-X) seconds.
Heuristics AVERAGE By recording some history, the current node derives the
object’s speed and direction for the next (T-X) seconds from the average of the object movement history.
Heuristics EXP_AVG Assigns different weights to the different stages of history.

Dual Prediction based Reporting
Reporting energy conservation
OTSN
Base Station
T frequency
RF Radio
Sensor MCU
Sensor Node

cb
Dual Prediction based Reporting
Dual Prediction based Reporting
f
d
a
Base Station
Instance Prediction
Model
e
Instance Prediction
Model
OTSN

Dual Prediction based Reporting
Location Models Indirectly affect the accuracy of the prediction
models.Two categories
Geometric location model Symbolic location model

Dual Prediction based Reporting
Location ModelsSensor Cell(SS)Triangle(ST)Grid(SG)Coordinate(SG)
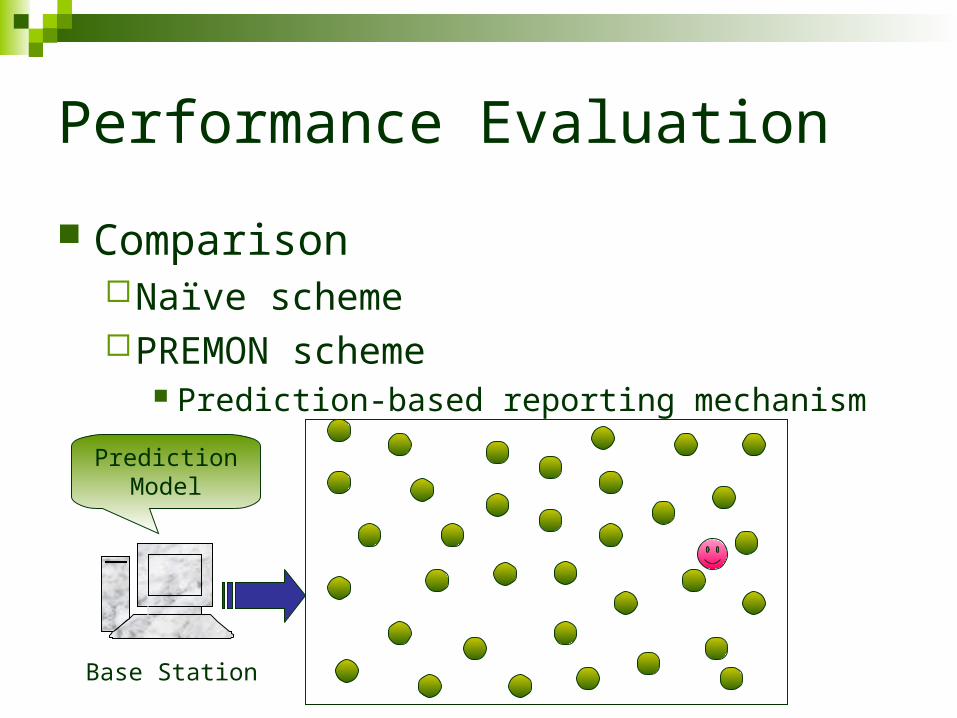
Performance Evaluation
ComparisonNaïve schemePREMON scheme
Prediction-based reporting mechanism
Base Station
PredictionModel
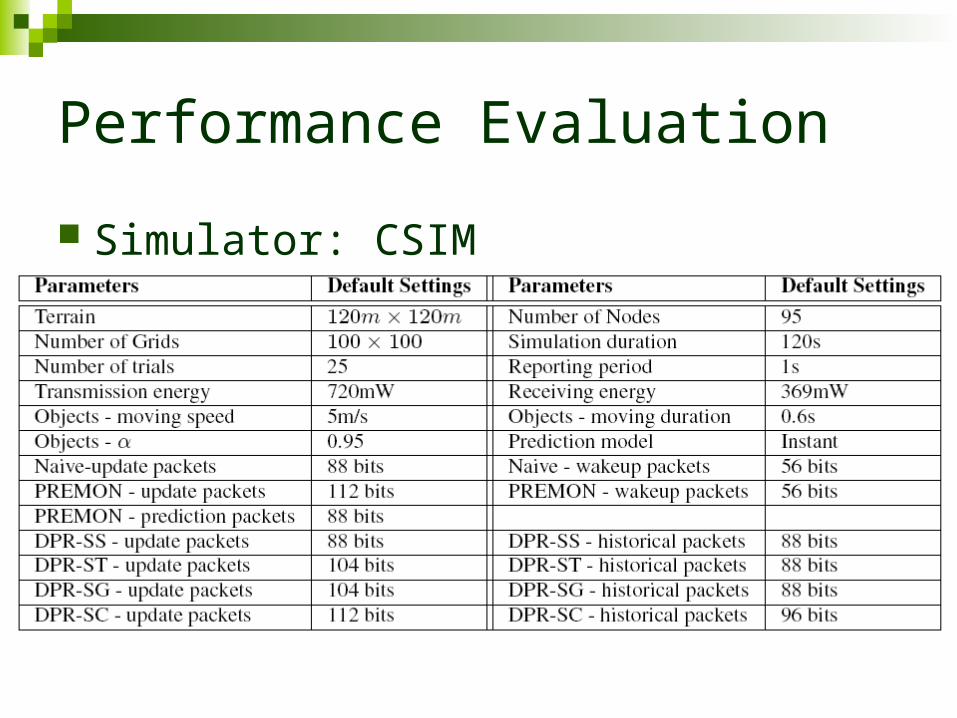
Performance Evaluation
Simulator: CSIM
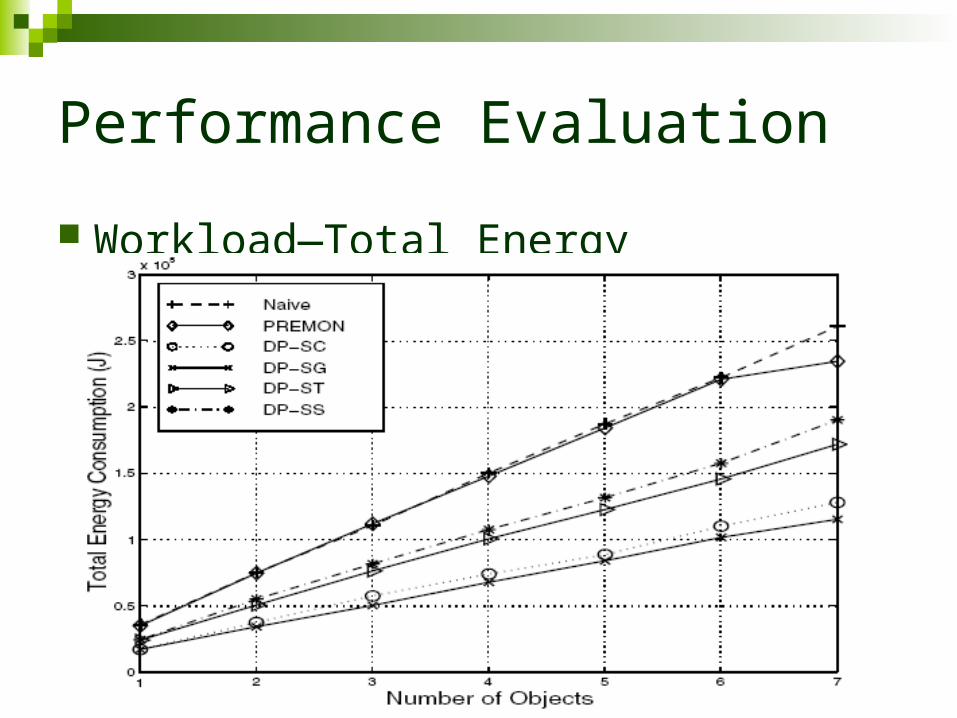
Performance Evaluation
Workload—Total Energy Consumption

Performance Evaluation
Workload—Prediction Accuracy

Performance Evaluation
Moving Duration—Total Energy Consumption

Performance Evaluation
Moving Duration—Prediction Accuracy

Performance Evaluation
Moving speed—Total Energy Consumption

Performance Evaluation
Moving speed—Prediction Accuracy

Performance Evaluation
Reporting period—Total Energy Consumption
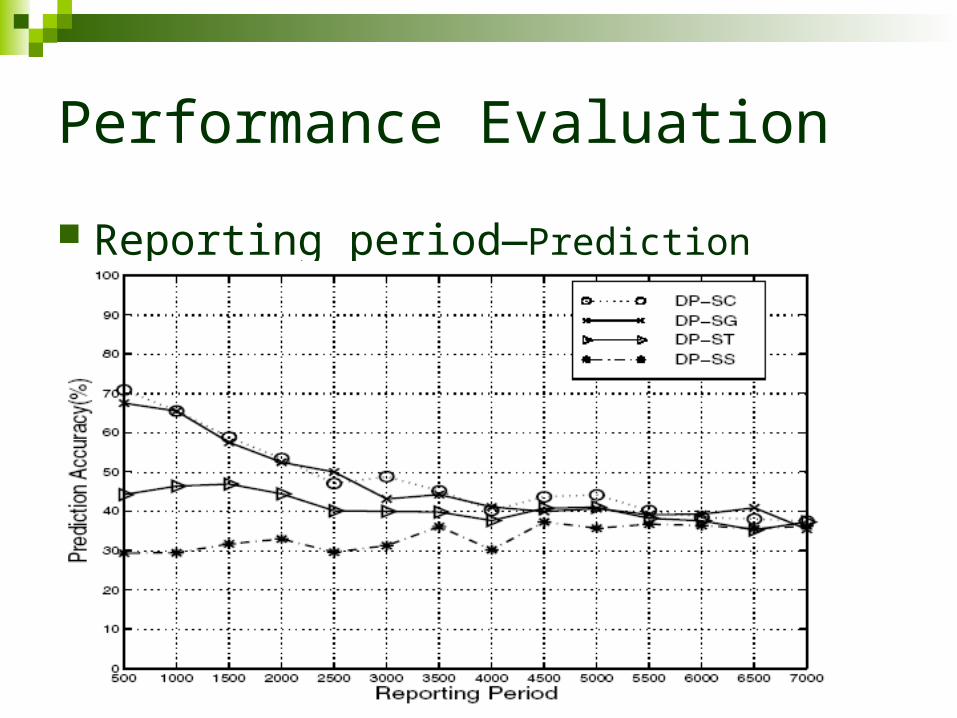
Performance Evaluation
Reporting period—Prediction Accuracy

Performance Evaluation
Location Model—Total Energy Consumption

Performance Evaluation
Location Model—Prediction Accuracy

Conclusion
OTSN energy consumptionMonitoring and Reporting
Dual Prediction Reporting (DPR)Prediction ModelLocation Model
DPR is able to minimize the energy usage of OTSNs efficiently under various condition.
Conclusion
Mobile objects have less impact on the low granular location models than the high granular one.
The longer reporting period is adverse to the prediction-based schemes with high granular location models, but improves the prediction accuracy for the location models with low gutturality by eliminating the granularity effect.


















