Drones Free Dome (DFD) - Zickel...
11
Zickel Engineering Consulting and Training LTD Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected] Page 1 of 11 Drones Free Dome (DFD) 1. Scope This document deals with anticipated operational needs of detection and interception of low signature – low altitude UAVs (Unmanned Arial Vehicle), and describes the basics for a system that protects selected assets and/or events. 2. Introduction The use of low cost drones, such as quadcopters and hobby RC drones, for recreational, commercial and security purposes is expected to ever grow in the decade ahead. The result of this process will be an abundance of low cost drones accessible for all to purchase or build freely. Past experience shows that every new technology inherently attracts outlaws and terrorist to adapt it for their activities. Hence, a simple threat analysis, taking into account this obvious market trend together with past experience, predicts that the proliferation of drones inevitably leads to criminal use of the technology. As a response to the threat there will be regulations, laws and enforcement. The proposed Drone Free Dome System provides protection against those who don’t obey the laws and regulations. 2.1. The Typical Threat As a first step in the process of mitigating the drones’ threat, a survey of the existing and available drones, the possible detection methods to detect them and possible methods to intercept them was conducted. A typical off-the-shelf drone uses efficient electric motors with efficient batteries, powerful processor, MEMS (Inertial, Magnetic & Baro) & GNSS for sensing, modern data links, cameras, and low weight composite materials structure. It has a flight endurance of up to 30 minutes within a typical radius of a few hundreds of meters (under mile). The drone weight is 1-10Kg and half of it can be payload. Such a drone cost is in the range of a few hundred dollars to a few thousand dollars. Sample of small UAVs is shown in Figure 1.
Transcript of Drones Free Dome (DFD) - Zickel...

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 1 of 11
Drones Free Dome (DFD)
1. Scope
This document deals with anticipated operational needs of detection and interception of
low signature – low altitude UAVs (Unmanned Arial Vehicle), and describes the basics for
a system that protects selected assets and/or events.
2. Introduction
The use of low cost drones, such as quadcopters and hobby RC drones, for recreational,
commercial and security purposes is expected to ever grow in the decade ahead. The
result of this process will be an abundance of low cost drones accessible for all to
purchase or build freely.
Past experience shows that every new technology inherently attracts outlaws and terrorist
to adapt it for their activities. Hence, a simple threat analysis, taking into account this
obvious market trend together with past experience, predicts that the proliferation of
drones inevitably leads to criminal use of the technology. As a response to the threat there
will be regulations, laws and enforcement.
The proposed Drone Free Dome System provides protection against those who don’t
obey the laws and regulations.
2.1. The Typical Threat
As a first step in the process of mitigating the drones’ threat, a survey of the existing and
available drones, the possible detection methods to detect them and possible methods to
intercept them was conducted.
A typical off-the-shelf drone uses efficient electric motors with efficient batteries, powerful
processor, MEMS (Inertial, Magnetic & Baro) & GNSS for sensing, modern data links,
cameras, and low weight composite materials structure. It has a flight endurance of up to
30 minutes within a typical radius of a few hundreds of meters (under mile). The drone
weight is 1-10Kg and half of it can be payload. Such a drone cost is in the range of a few
hundred dollars to a few thousand dollars. Sample of small UAVs is shown in Figure 1.

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 2 of 11
Figure 1 - Samples of small drones
2.2. Recent Events of Exposure to the Threat
At present, in 2015, FAA lists about 150 reported events of drones in the vicinity of the
flight path per month! Superposing the above rather obvious prediction with this FAA
report reveals a scary picture of a disaster knocking on our door and ready to drop onto
us. Counter measures must be developed, but the development cycle of 3 to 5 years must
not start only after the first event materialised, leaving all of us exposed to the threat for
that period.
To elaborate the previous statement, enclosed are just a handful of other examples from
recent events of people and sites that failed being kept secured, in spite of the obvious
necessity:
16 September 2013, Dresden, Germany,
A camera drone had a rough landing in front of Chancellor Angela Merkel at an election
campaign event in Germany after police told its operator to bring down the craft (fig 2).

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 3 of 11
https://www.youtube.com/watch?v=1-5MDqGGon8
Figure 2 - Rough landing of a drone in front of Chancellor Angela Merkel
27 January 2015, Washington DC, USA
White House drone crash: drunk government employee crash lands Quadcopter on
Obama’s lawn. An investigation is still ongoing after a government worker reportedly
crashed his small recreational drone onto the White House lawn early Monday morning
(Fig 3).
https://www.youtube.com/watch?v=qRH6Ec82jR4
Figure 3 – Illustration of a drone in front of the White House
05 November 2014, Belleville-sur-Loire nuclear plant, France
Police arrested three people found in possession of remote-controlled drones near one
of the nuclear plants involved in a series of mystery overflights by the unmanned
aircraft (Fig 4).

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 4 of 11
https://www.youtube.com/watch?v=xIaVWP34FO0
Figure 4 – Illustration of a drone above a nuclear plant in France
13 June 2013, Taksim Square, Istanbul, Turkey
Police shoot down a camera carrying RC quadrocopter (Fig 5).
https://www.youtube.com/watch?v=_A-ufp5gY3s
Figure 5 – A drone shut by a police officer at Turkey
3. Threat Detection Method
The main difficulty for an early detection of a drone imposing a threat is its low signature
which leads to a close range of possible detection. Short range corresponds to a very
short time of detection and response. Furthermore, a low-signature light UAV may be
launched from a very close range from its target, escalating the above mentioned
difficulty.
Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 5 of 11
The first key element in achieving an effective defence over a specific designated area
from such potential attack is short range fast detection with low rate of false alarms.
Achieving this objective is feasible only through multi-domain sensors fusion.
The proposed detection system is flexible, modular and scalable. In the heart of the
system, the real-time data-fusion, classification, and analysis, scenario driven algorithms
and software.
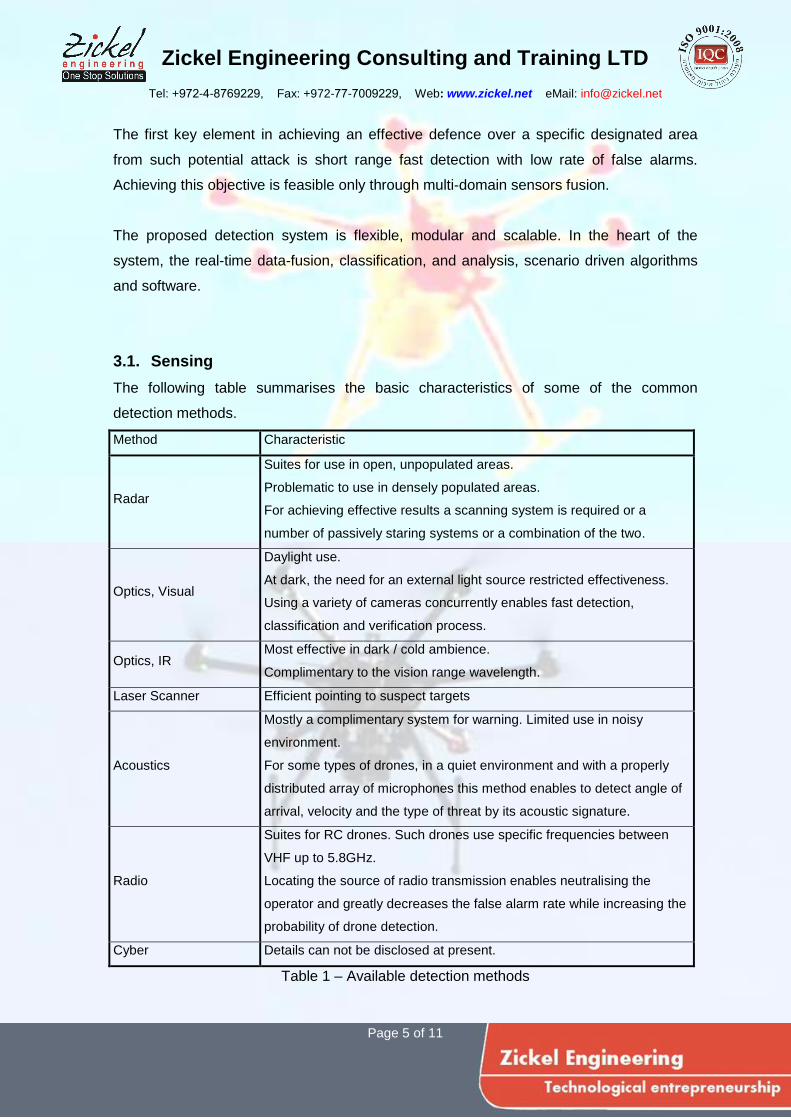
3.1. Sensing
The following table summarises the basic characteristics of some of the common
detection methods.
Method Characteristic
Radar
Suites for use in open, unpopulated areas.
Problematic to use in densely populated areas.
For achieving effective results a scanning system is required or a
number of passively staring systems or a combination of the two.
Optics, Visual
Daylight use.
At dark, the need for an external light source restricted effectiveness.
Using a variety of cameras concurrently enables fast detection,
classification and verification process.
Optics, IR Most effective in dark / cold ambience.
Complimentary to the vision range wavelength.
Laser Scanner Efficient pointing to suspect targets
Acoustics
Mostly a complimentary system for warning. Limited use in noisy
environment.
For some types of drones, in a quiet environment and with a properly
distributed array of microphones this method enables to detect angle of
arrival, velocity and the type of threat by its acoustic signature.
Radio
Suites for RC drones. Such drones use specific frequencies between
VHF up to 5.8GHz.
Locating the source of radio transmission enables neutralising the
operator and greatly decreases the false alarm rate while increasing the
probability of drone detection.
Cyber Details can not be disclosed at present.
Table 1 – Available detection methods

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 6 of 11
3.2. From Data Fusion to Sinergy
In the heart of the threat detection and verification system lay a number of powerful
parallel distributed processing units which fully share information among themselves. The
system collects the data from all sensors and using advanced data fusion and pattern
recognition algorithms, some of which mimic human’s brain methods, it recognises any
abnormal patterns and behaviour. Thus, it is possible to identify multiple potential threats
in a complex scene. The below table demonstrates part of the sensors and their
respective contribution to the threat detection analysis.
Range, m 20 40 80 150 300 600
Threat level Acute High Medium Low None
Phase Verification Identification Detection
Radio
spectrogram
Phase Verification Identification Detection Suspicion
Visual
image
0.25mr/Pix
Phase Identification Detection Suspicion
Thermal
image
0.5mr/Pix
Phase Detection Suspicion
360° Image
1mr/Pix
Phase Detection Suspicion
Aucoustic
spectrogram
Image relative
size
Table 2 – Expected detection range with various sensors
A dynamic signature bank of known threats and non-threats is to be integrated into the
system. As the system is operationally deployed, this bank automatically expands and
Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 7 of 11
enhanced by the system’s classification and learning algorithms. A shared repository
would let all authorised systems to be updated in real time or offline.
At present, in order to establish a seed for this signatures bank, we have classified a few
dozen models of drones. The classification is based on basic characteristics of the drone
physical qualities, type of communication, navigation and command systems, range of
operation, etc. Here is a partial list of the classes used:
Command method: pre-programmed, online, hybrid, man in the loop, autonomous
Range: line of sight, BVR1, distance
Navigation system: None, Baro & Compass, GNSS2, INS3, Hybrid
Radio link: up-link, down-link, frequency, bandwidth, spectral signature, etc.
Video use: no camera, live use of video input onboard vs. at base station.
Homing system: man in the loop, autonomous, radio locked, video assisted, etc.
Propulsion system and thermal signature.
The different class correspond to different drone size and different ambient signatures,
hence to different means of detection and threat mitigation.
4. System’s Objectives and Design
4.1. Shielding Target Zones
Enforcing a no-fly-zone and shielded area varies with the nature of the target or event at
hand. At the lowest end, a small specific target over a small confinement, such as a
personal protection of a VIP on a political rally. Such a limited target system is of a
relatively low cost, tribute to the size of the shielded zone, limited features and the
possibility to provide the target some other extra means of complimentary protection.
Two main differentiators classify the different shielded zones and the means to protect
them: the size of the shielded area and the level of potential damage. As the protected
target gets bigger and the potential global damage is greater, e.g. a sport event or a
nuclear plant, the complexity of the required shielding system increases.
1 BVR – Beyond Vision Range
2 GNSS – Global Navigation Satellite System
3 INS – Inertial Navigation System

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 8 of 11
Among other, here is a partial list of typical facilities needed to be protected:
Communication Infrastructure: Radio / TV / Phone broadcasting base stations, etc.
Energy Infrastructure: Power plants, Fuel reservoirs, etc.
State facilities and borders: Army camps, Jails, Hospitals, Courts, Borders, etc.
Events: Sport events, Open air concerts, Parades, etc.
4.2. System Structure
The basic features of the system are: modularity, scalability and hierarchically. All end
units are designed to communicate and co-operate directly and or through a local
command and control unit or via a global command centre. Thus, a bigger system is
easily assembled from a number of ready modules and sub-systems, incorporating sensor
units, communication units and command units. Whether and ad-hoc deployment of a
fixed installation, the system is fast to deploy, simple to maintain and bears low total cost
of ownership. It is ready to connect to the clients’ infrastructure via a connectivity module.
This design also ensures redundancy and high survivability of the system.
5. Preliminary Tests
Sample visual and thermal pictures of drones at various ranges were taken, acoustics
recording were analysed, and radio tracking of WiFi source was performed. The results
points out that there is no technological gap, and the expected results are listed in table 2
above.
5.1. Optical Detection
To achieve fast detection with low false alarm range a mix of visual and thermal cameras
is required. wide FOV and narrow FOV cameras is required as shown in Fig 6.
Figure 6 – Visual & Thermal images of a drone
Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 9 of 11
5.2. Acoustic Detection
Drones’ propellers have a typical acoustic signature. Appropriate filtering can distinguish
between ambient noise and drone acoustic signature. Adding wind information will
improve the detection . Figure 7 demonstrates the spectrogram of a quadcopter together
with ambient noise.
Figure 7 – Acoustic Spectrogram of a Drone
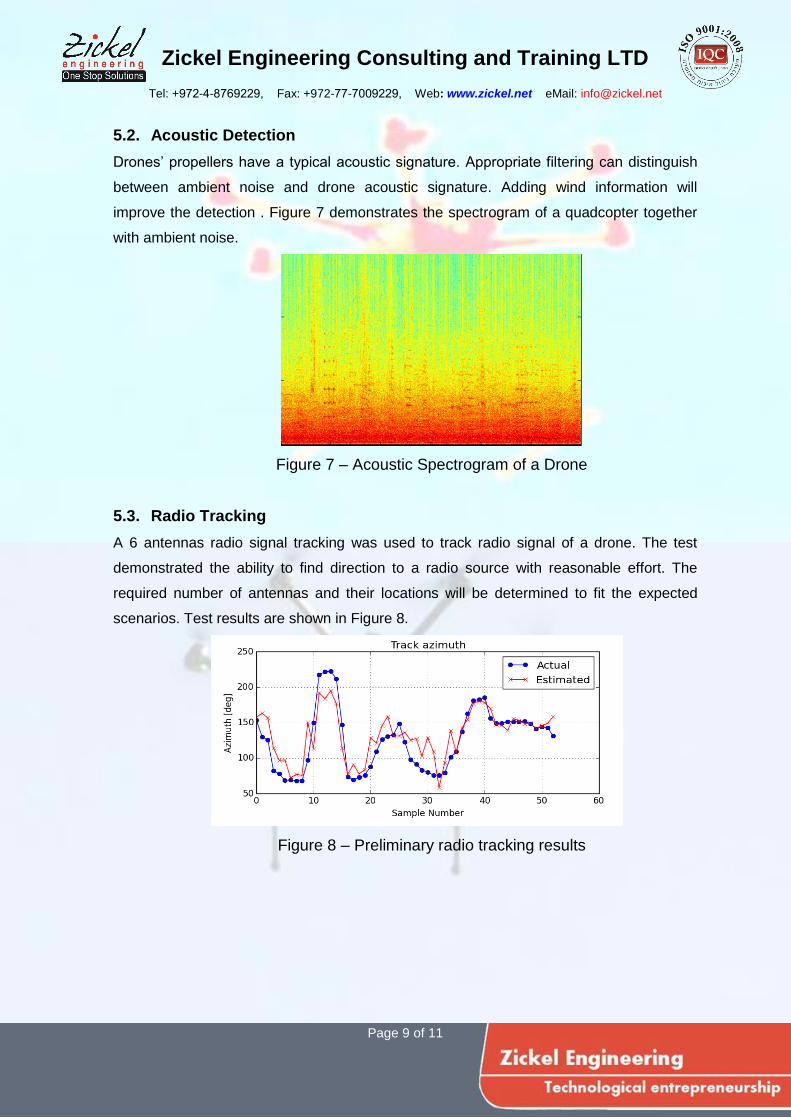
5.3. Radio Tracking
A 6 antennas radio signal tracking was used to track radio signal of a drone. The test
demonstrated the ability to find direction to a radio source with reasonable effort. The
required number of antennas and their locations will be determined to fit the expected
scenarios. Test results are shown in Figure 8.
Figure 8 – Preliminary radio tracking results

Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 10 of 11
6. Threat Interception
The interception process starts in analyzing the drone broadcast and if possible analyzing
the operator broadcast. Once the broadcast protocols are identified, the possibility to
perform virtual interception by overtaking the drone up-link will be examined.
Drones interception is divided into categories according to the nature of the protected area
and according to the configuration of the detected drone:
Immediate intercept, fits in sterile areas, can be done: by jamming of the radio
channels of the drone, by another combat drone, firing, or energy weapon.
Diverting the drone to a sterile area by overtaking the up-link or spoofing the GPS.
Return home – Jamming the GPS will typically cause the drone to return home.
Controlled landing – to be performed by overtaking the up-link.
Capture – the drone can be physically captured by a larger combat drone.
Taking over the command and control station – following detection of the drone, the
command station can be located and the drone mission will be aborted.
The interception process might include GPS jamming for large areas or jamming to a
focused area surrounding the drone. The focused jamming might require the use of a
combat drone to fly above the threat.
Zickel Engineering Consulting and Training LTD
Tel: +972-4-8769229, Fax: +972-77-7009229, Web: www.zickel.net eMail: [email protected]
Page 11 of 11
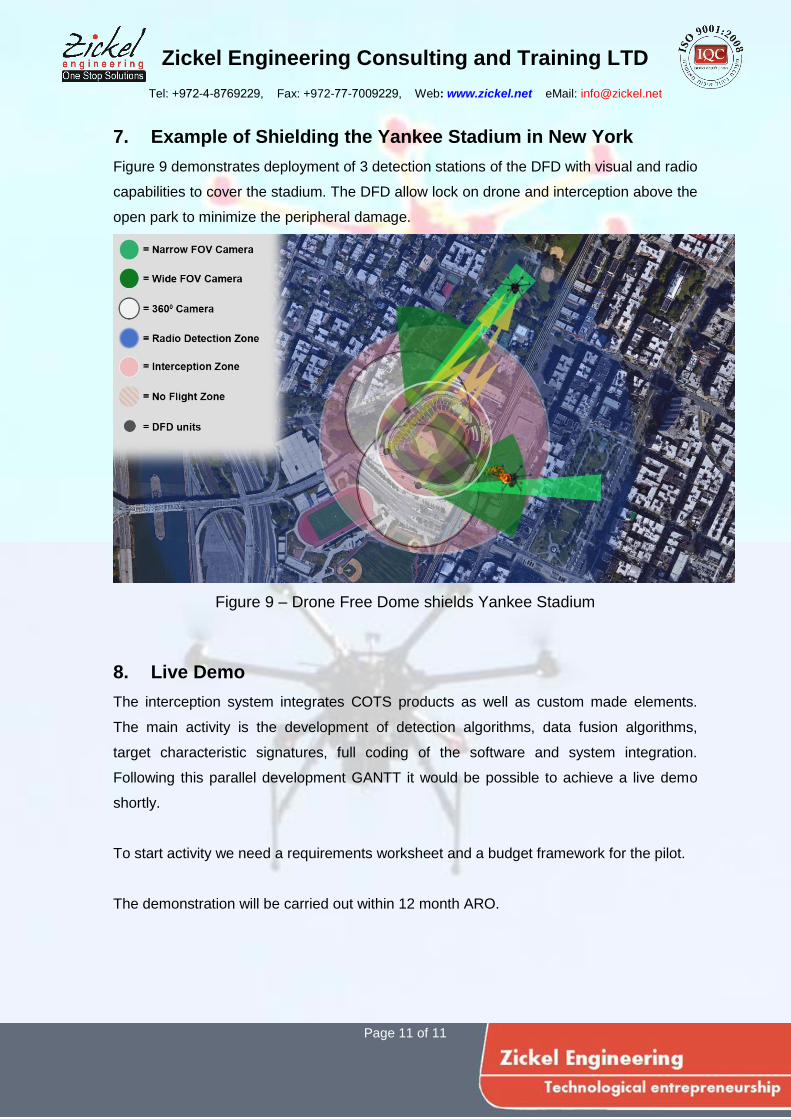
7. Example of Shielding the Yankee Stadium in New York
Figure 9 demonstrates deployment of 3 detection stations of the DFD with visual and radio
capabilities to cover the stadium. The DFD allow lock on drone and interception above the
open park to minimize the peripheral damage.
Figure 9 – Drone Free Dome shields Yankee Stadium
8. Live Demo
The interception system integrates COTS products as well as custom made elements.
The main activity is the development of detection algorithms, data fusion algorithms,
target characteristic signatures, full coding of the software and system integration.
Following this parallel development GANTT it would be possible to achieve a live demo
shortly.
To start activity we need a requirements worksheet and a budget framework for the pilot.
The demonstration will be carried out within 12 month ARO.