Drivetrain Lessons Learned Summer 2008
14
Drivetrain Lessons Learned Summer 2008 Team 1640 Clem McKown - mentor August 2008
-
Upload
xena-hernandez -
Category
Documents
-
view
23 -
download
3
description
Drivetrain Lessons Learned Summer 2008. Team 1640 Clem McKown - mentor August 2008. Observations – Bi-axial (Twitch). Twitch feature worked beautifully – effortless, radiusless 90° turns Robot was basically unsteerable in “x” orientation (drive aligned w/ long axis) - PowerPoint PPT Presentation
Transcript of Drivetrain Lessons Learned Summer 2008

Drivetrain Lessons Learned
Summer 2008
Team 1640Clem McKown - mentor
August 2008

Observations – Bi-axial (Twitch)
Twitch feature worked beautifully – effortless, radiusless 90° turns
Robot was basically unsteerable in “x” orientation (drive aligned w/ long axis)
Robot steered easily in “y” orientation (drive aligned w/ short axis)
w/ 4 omni-wheels, robot steered easily, but was also easily pushed about
w/ 2 catter-corner omni-wheels, robot turned one direction, but not the other

Observations – 6wd 6wd w/ 5” knobbies could not turn. 6wd w/ 4” wheels turned well
Quite okay w/ 6 std wheels – not easily pushed
Easier w/ 4 std & 2 catter-corner omni-wheels - #2 in terms of being pushed
Similar turning w/ 4 std & 2 aft omni-wheels - #3 in terms of being pushed
Easiest turning w/ 2 mid std & 4 corner omni-wheels – and a real easy pushover

Drive Basics - Propulsion
r
Fn
Fd = Drive ForceFd = /r
Fn = normal forcebetween frictive surfaces
For a 120 lbm robot withweight equally distributedover four wheels, Fn wouldbe 30 lbf at each wheel.
The same robot with sixwheels would have Fn
of 20 lbf at each wheel(at equal loading).
Fp = Propulsive ForceFor wheels not sliding on drive surface: Fp = -Fd; Fp ≤ Ff/s
For wheels slipping on drive surface: Fp = Ff/k
= torquer = wheel radius
Ff = Friction ForceFf = Fn
= coefficient of friction
For objects not sliding relativeto each other = s (static coefficient of friction)
For objects sliding relative toeach other = k (kinetic coefficient of friction)
as a rule, s > k
(this is why anti-lock brakes are such agood idea)
s
k

Robot Propulsion (Pushing)
Symmetric 4wd Robot Symmetric 6wd Robot Conclusions

Propulsion Force (Fp) – Symmetric 4wd
Assumptions / Variables: = torque available at each axle m = mass of robot Fn = Normal force per wheel = ¼ m g/gc (SI Fn = ¼ m g) – evenly weighted wheels rw = wheel radius
Rolling without slipping: Fp/w = /rw - up to a maximum of Fp/w = s Fn
Pushing with slipping: Fp/w = k Fn
Propulsion Force per wheel
Robot Propulsion Force
Fp/R = Fp/w
Rolling without slipping: Fp/R = 4/rw
Pushing with slipping: Fp/R = 4k Fn
Fp/R = k m g/gc
(SI): Fp/R = k m g

Fp – Symmetric 6wd
Assumptions / Variables: 2/3 = torque available at each axle same gearing as 4wd w/ more axles m = mass of robot Fn = Normal force per wheel = 1/6 m g/gc (SI Fn = 1/6 m g) – evenly weighted wheels rw = wheel radius
Propulsion Force per wheel
Rolling without slipping: Fp/w = 2/3/rw - up to a maximum of Fp/w = s Fn
Pushing with slipping: Fp/w = k Fn
Robot Propulsion Force
Fp/R = Fp/w
Rolling without slipping: Fp/R = 6 2/3/rw = 4/rw
Pushing with slipping: Fp/R = 6k Fn
Fp/R = k m g/gc
(SI): Fp/R = k m g
Conclusion
Would not expect 6wdto provide any benefitin propulsion (or pushing)vis-à-vis 4wd.

Propulsion Conclusions Provided that all wheels are driven, for a robot of a given
mass and fixed total driving force, the number of drive wheels does not influence propulsion or pushing force available.
The existence of undriven wheels, which support weight but do not contribute to propulsion, necessarily reduce the available pushing force as long as those undriven wheels are weighted.
For a robot with a rectangular envelope, given wheelbase, mass and center of gravity, (4) wheels (driven or not) provide the maximum stability. Additional wheels neither help nor hurt.
A common (l-r) side drive-train (linked via chains or gears) has the following propulsion advantage over a drive-train having individual motors for each wheel: As wheel loading (Fn) changes and becomes non-uniform, a common drive-train makes more torque available to the loaded wheels. Motor stalling (and unproductive spinning) are therefore less likely under dynamic (competition) conditions.

Stationary turning ofsymmetric robot Assume equal loading of all wheels Assume turn axis is center of wheelbase Some new terms need an introduction:
t – wheel/floor coefficient of friction in wheel tangent direction (kinetic unless otherwise noted)
x – wheel/floor coefficient of friction in wheel axis direction (kinetic unless otherwise noted) – note that omni-wheels provide x significantly lower than t
Ft – wheel propulsive force in turn tangent direction Fx – wheel drag force in wheel axis direction Fr – wheel resistance to turn (force) in turn tangent
direction A Premise: Stationary turning demands wheel
slippage, therefore drive force (Fd) must be capable of exceeding static friction (sFn) as a prerequisite for turning.

Stationary turning – 4wd
w
lFp = tFn
= tan-1(l/w)
Ft = Fp cos = Fp
= propulsionforce for turnin the directionof the turningtangent
w√(w²+l²)
F t
Fp = tFn
Ft = Fp cos = Fp
w√(w²+l²)
Ft
turning resistance
turning resistance
turn = 4[Ft–min(Ft,Fr)]rturn
= 4[Ft-min(Ft,Fr)]√(w²+l²) = 4[Fpw – min(Fpw,Fxl )] = m[tw – min(tw,xl )]g/gc
r turn =
√(w
²+l²)
Fx = x Fn
= axial directiondrag (force)resisting turning
Fr
Fr = Fx sin = Fx
= drag forceagainst turnin the directionof the turningtangent
l√(w²+l²) Fp =
Propulsionforce indirectionof wheeltangent
Turning is possible if tw > xl
propulsion propulsion

Stationary turning – 6wd
Fp = tFn
Fp = Propulsionforce indirectionof wheeltangent
w
F t
Ft = Fp cos = Fp
= propulsionforce for turnin the directionof the turningtangent
w√(w²+l²)
= tan-1(l/w)
l
Fx = x Fn
= axial directiondrag (force)resisting turningF r
Fr = Fx sin = Fx
= drag forceagainst turnin the directionof the turningtangent
l√(w²+l²)
Fp = tFn
turn = 4(Ft–Fr)rturn + 2Fpw = 4(Ft-Fr)√(w²+l²) + 2Fpw = 6Fpw – 4Fxl = m(tw – 2/3xl )g/gc (SI) = mg(tw – 2/3xl )
r turn =
√(w
²+l²)
Turning is possible if tw > 2/3xl
All other factors being equal, 6wdreduces resistance to turning by 1/3
rd
Additional benefit: center wheels could turn w/outslippage, therefore use s rather than k (increased propulsion)

Twitch drive testing – steering overview
These observations are consistent with this analysis where: turn = m(tw – xl )g/gc
Would expect FRC bot to be steerable in y mode, but not in x mode w/out omni-wheels Model does not explain catter-corner omni-wheel steering asymmetry
Drive Orientation x x y yScale ½ (VEX) Full (FRC) ½ (VEX) Full (FRC)l 7.41 14.85 5.00 9.88w 6.27 11.45 8.67 16.42l/w 1.18 1.30 0.58 0.60
Steerability Not Steerable Very Good

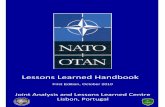
6wd Geometry
r =
4.4
55
r = 7.473
α = 53.4°
l = 6w = 4.455
l/w = 1.35
steerable w/4” wheels (but not w/5” knobbiesshown – it’sa power thing)

Connection to observations6wd
The 6wd prototype w/ 5” diam knobby wheels could not turn. It was clearly underpowered.
The 6wd prototype w/ 4” diam wheels turned satisfactorily in all tested configurations with/without omni-wheels.