Dr. S. K. Kudari, Professor, Department of Mechanical Engineering, B
33
Dr. S. K. Kudari, Professor, Department of Mechanical Engineering, B V B College of Engg. & Tech., HUBLI email: [email protected]
-
Upload
neharana24 -
Category
Documents
-
view
132 -
download
1
Transcript of Dr. S. K. Kudari, Professor, Department of Mechanical Engineering, B

Dr. S. K. Kudari,Professor,Department of Mechanical Engineering,B V B College of Engg. & Tech., HUBLI
email: [email protected]
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
CHAPTER-6Systems with two degree of freedom
Recap
Mathematical modeling of two DOF system
Mathematical derivation of governing equations
Newton's method
Energy method (Lagrange’s method)
Solution to governing equations
Natural frequencies
Modal vectors and modal matrix
Mode shapes

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Torsional systems
Definite and semi-definite systems
Equivalent shaft for a torsional system
A turbo-generator system
Recap

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
m
K
m
K
K
x1
x2K
K
Practice problems (Linear definite systems)
Steps(i) derive the equations of motion,(ii) setup the frequency equation and obtain the fundamental natural frequencies(iii) obtain the modal vectors and modal matrix(iv) draw mode shapes of the system.

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
m
K
m
K
K
x1
x2K
K
. Force equilibrium diagram
Governing equations Newton’s method
m1
Kx1
K(x2-x1)
11xm
Kx1
m2 22xm
Kx2Kx2
Practice problems

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomPractice problems
m
K
m
K
K
x1
x2K
K
Lagrange’s method
22
21 xm
2
1xm
2
1T
22
22
2122
21
21 Kx
2
1Kx
2
1)x(xK
2
1Kx
2
1Kx
2
1U
2
1i x
xx
The Lagrange’s equation is :
iiii
Qx
U
x
T
x
T
dt
d

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomPractice problems
m mK K K
x1 x2
m mK K K
x1 x2
K
For the systems shown in Figure(i) derive the equations of motion,(ii) setup the frequency equation and obtain the fundamental natural frequencies(iii) obtain the modal vectors and modal matrix(iv) draw mode shapes of the system.
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
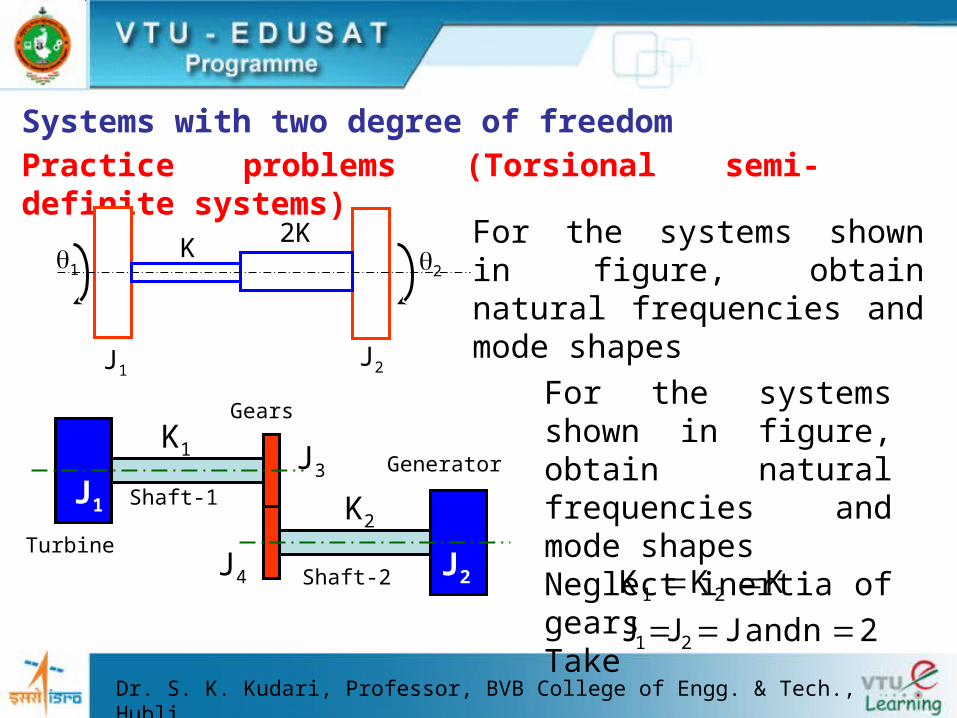
Systems with two degree of freedomPractice problems (Torsional semi-definite systems)
J1J2
1 2K
2K
Turbine
Generator
Gears
Shaft-2
Shaft-1J1
J2
J3
J4
K1
K2
For the systems shown in figure, obtain natural frequencies and mode shapes
For the systems shown in figure, obtain natural frequencies and mode shapesNeglect inertia of gearsTake
2n and JJJ
KKK
21
21

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
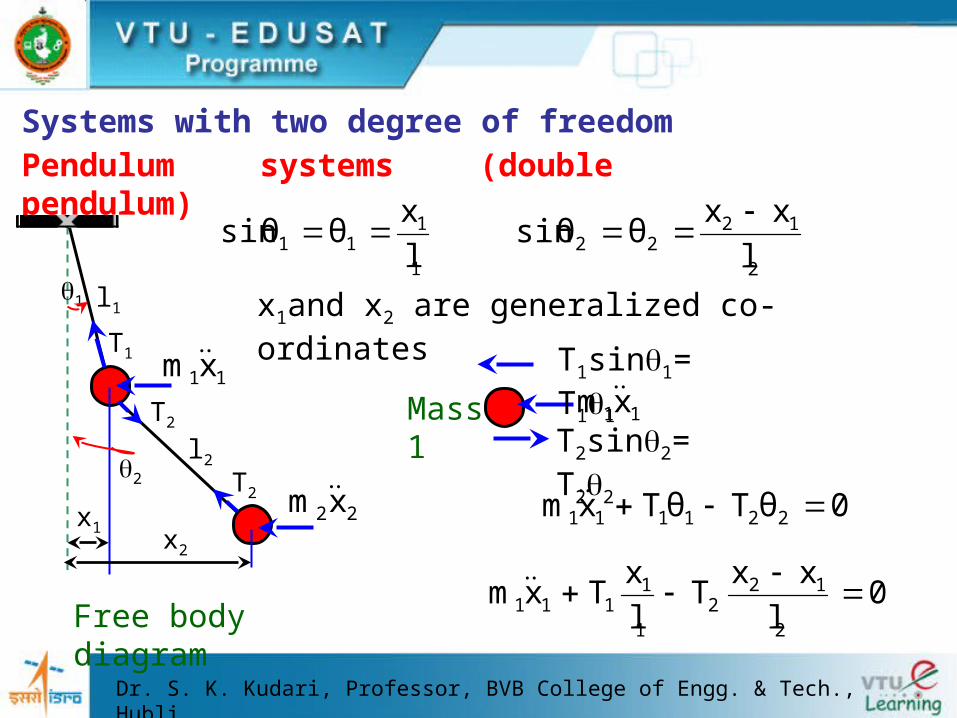
Systems with two degree of freedomPendulum systems (double pendulum)
m1
m2
l1
l2
Obtain the natural frequencies of the double pendulum shown in the figure.For simplicity take m1=m2=m and l1=l2=l

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomPendulum systems (double pendulum)
Due to self weight of masses, the pendulum roads are in tension
m1g
m2g
l1
l2
T1
T2
T2
gmT 22
211 TgmT
)gm(mgmgmT 21211
Above equations holds good for small oscillations
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Free body diagram
Pendulum systems (double pendulum)
l2
x1x2
2
l11
T1
T2
11xm
22xm
T2
1
111 l
xθsinθ
2
1222 l
xxθsinθ
0θTθTxm 221111
0l
xxT
l
xTxm
2
122
1
1111
11xm T1sin1= T11
T2sin2= T22
Mass 1
x1and x2 are generalized co-ordinates

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomPendulum systems (double pendulum)
0l
xxg)(m
l
x)gm(mxm
2
122
1
12111
m1=m2=m and l1=l2=l
0l
xx(mg)
l
x(2m)gxm 121
1
0xl
mgx
l
3mgxm 211
1 Eqn. of motion

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Free body diagram
Pendulum systems (double pendulum)
l2
x1 x2
2
l11
T1
T2
11xm
22xm
T2
1
111 l
xθsinθ
2
1222 l
xxθsinθ
22xm T2sin2= T22
0θTxm 2222
0l
xxTxm
2
12222
Mass 2

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomPendulum systems (double pendulum)
0l
xxTxm
2
12222
m1=m2=m and l1=l2=l
0l
xxgmxm
2
12222
0xl
mgx
l
mgxm 212
2nd Eqn. of motion

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomPendulum systems (double pendulum)
0xl
mgx
l
mgxm 212
2 Eqn. of motion
0xl
mgx
l
3mgxm 211
1 Eqn. of motion
Solution to governing eqns.:
φωtsinAx 11 φ)sin(ωAx 22 t
Assume SHM
The above equations have to satisfy the governing equations of motions
Governing equations of motions:
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
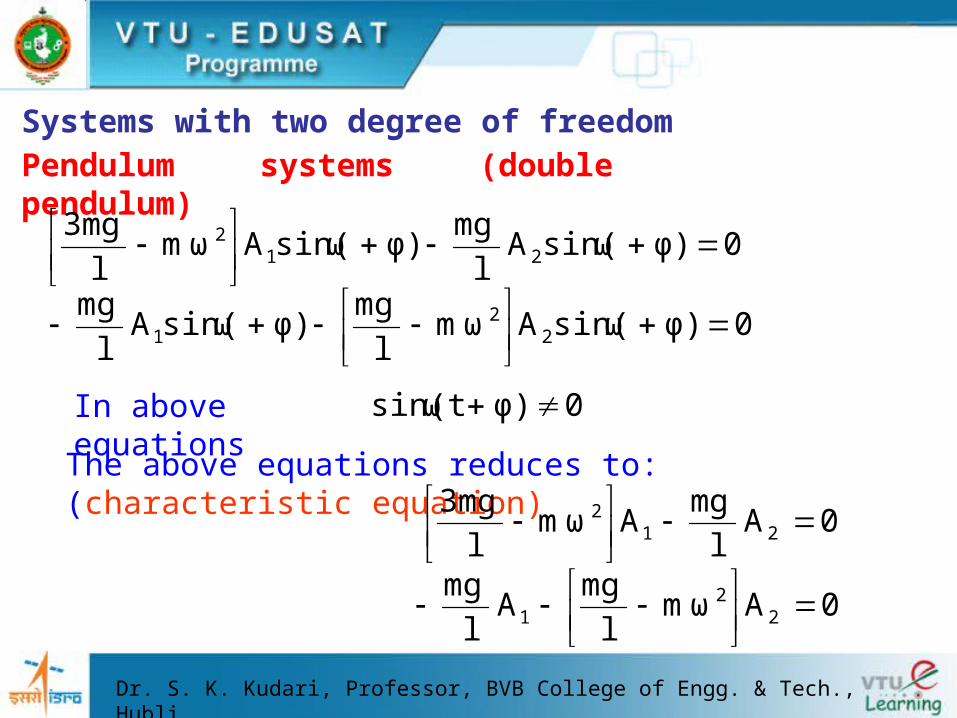
Systems with two degree of freedomPendulum systems (double pendulum)
0φ)sin(ωAl
mgφ)sin(ωAmω
l
3mg21
2
0φ)sin(ωAmωl
mgφ)sin(ωA
l
mg2
21
0φ)sin(ω tIn above equations
The above equations reduces to: (characteristic equation)
0Al
mgAmω
l
3mg21
2
0Amωl
mgA
l
mg2
21

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
0
mωl
mgl
mg
........
l
mg
mωl
3mg
2
2
The above equation is referred as a characteristic determinant Solving, we get :
Frequency equation2
222242
l
g2m
l
gω4mωm
Pendulum systems (double pendulum)

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
l
g0.27ω1
l
g3.73ω2 radians/sec
Natural frequencies of the system
Modal vectors and the mode shapes can be obtained by usual meaner
Pendulum systems (double pendulum)

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomString systems
Obtain the natural frequencies of the string system shown in the figure.For simplicity take m1=m2=m and l1=l2=l3=l
m2
l1 l2 l3
m1

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
m2
l1 l2 l3
m1
Free body diagram
x1 x21
2
3
TT
T
For small angular oscillations, it can be assumed that the tension in the string (T) do not change
l
xθ 1
1
l
xxθ 21
2
l
xθ 2
3
String systems

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Free body diagram
m2
l1 l2 l3
x1 x21
2
3
TT
T
m1
m1
T TT 2T 1
1xm
m2
T 2
T 3
2xm
String systems

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomString systems
m1
T TT 2T 1
1xm
0TθTθxm 211
0l
xxT
l
xTxm 211
1
0xl
Tx
l
2Txm 211
0TθTθxm 322
0l
xT
l
xxTxm 221
2
0xl
2Tx
l
Txm 212
m2
T 2
T 3
2xm

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedomString systems
0xl
Tx
l
2Txm 211
0xl
2Tx
l
Txm 212
Equations of motion
Solution to governing eqns.:
φωtsinAx 11 φ)sin(ωAx 22 t
Assume SHM
The above equations have to satisfy the governing equations of motions
2 Eqn. of motion
1 Eqn. of motion
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
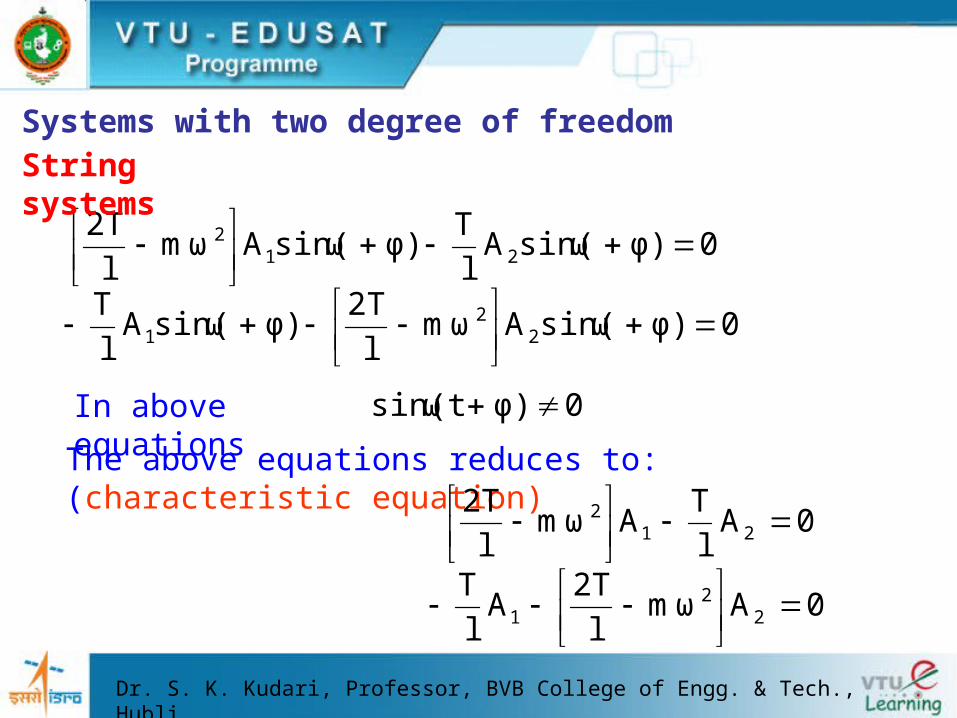
Systems with two degree of freedom
0φ)sin(ωAl
Tφ)sin(ωAmω
l
2T21
2
0φ)sin(ωAmωl
2Tφ)sin(ωA
l
T2
21
0φ)sin(ω tIn above equations
The above equations reduces to: (characteristic equation)
0Al
TAmω
l
2T21
2
0Amωl
2TA
l
T2
21
String systems

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
0
mωl
2Tl
T
........
l
T
mωl
2T
2
2
The above equation is referred as a characteristic determinant Solving, we get :
Frequency equation2
2242
l
3T
l
4Tmωωm
String systems

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
ml
Tω1
ml
3Tω2 radians/sec
Natural frequencies of the system
String systems
As the system has two natural frequencies, under certain conditions it may vibrate with first or second frequency, which are referred as principal modes of vibration

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Characteristic equations of the system are:
First principal mode of vibrationThe system vibrates with first fundamental natural frequency, i.e . 1ωω
String systems
0Al
TAmω
l
2T21
2
0Amωl
2TA
l
T2
21

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
For vibrations under Mode-I, consider
A11-amplitude of first mass (m1) due to frequency A21-amplitude of second mass (m2) due to frequency
Characteristic equations of the system changes to:
111
21 μAA
amplitude ratio Let
1ω
1ω
String systems
0Al
TAmω
l
2T2111
21
0Amωl
2TA
l
T21
2111
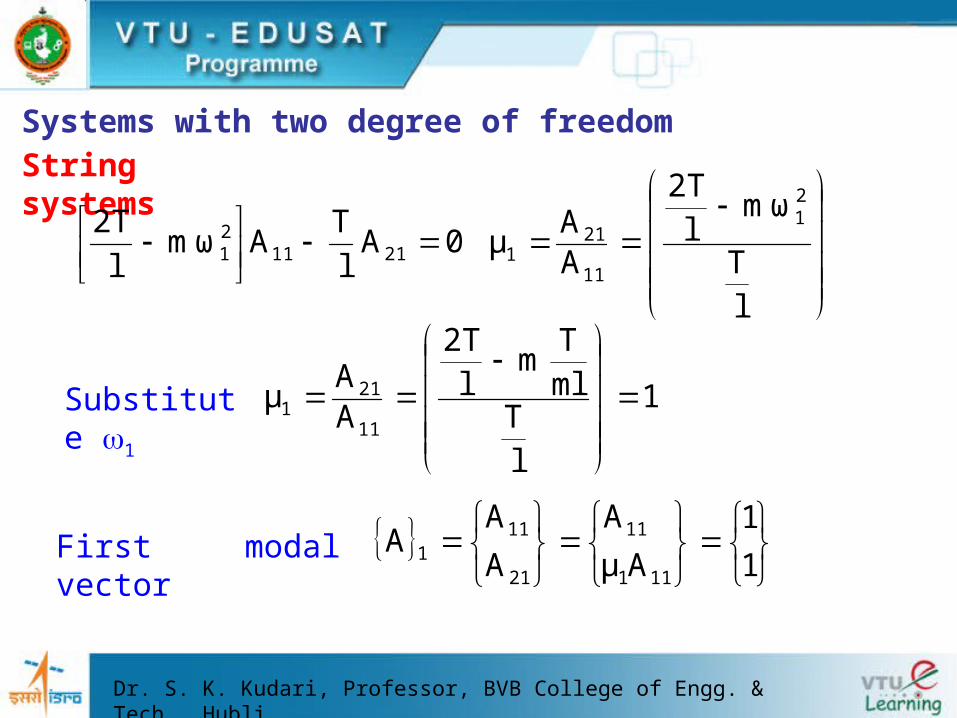
Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
lT
mωl
2T
AA
μ
21
11
211
1
1
Aμ
A
A
AA
111
11
21
111
Substitute 1
First modal vector
String systems
0Al
TAmω
l
2T2111
21
1
lT
mlT
ml
2T
AA
μ11
211

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
For vibrations under Mode-II, consider
A12-amplitude of first mass(m1) due to frequency A22-amplitude of second mass (m2) due to frequency
Characteristic equations of the system changes to:
212
22 μAA
amplitude ratio Let
2ω
2ω
String systems
0Al
TAmω
l
2T2212
22
0Amωl
2TA
l
T22
2212

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
Substitute 2
Second modal vector
1
1
Aμ
A
A
AA
122
12
22
122
String systems
lT
mωl
2T
AA
μ
22
12
2210A
l
TAmω
l
2T2212
22
1
lT
ml3T
ml
2T
AA
μ11
211

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Systems with two degree of freedom
11
11
122
12
111
1121 Aμ
A...
Aμ
AAAAModal matrix
String systems
m2
l1 l2 l3
m1
Mode shapes of the system
11
1-1
Mode I
Mode II

Dr. S. K. Kudari, Professor, BVB College of Engg. & Tech., Hubli
Summary
Pendulum systems (double pendulum)
Torsional systems
String systems
Linear systems
Definite and semi-definite systems
Analysis of various 2DOF systems such as: