DOOR TO DOOR FREIGHT TRANSPORTATION
28
FORMULATIONS DOOR TO DOOR FREIGHT TRANSPORTATION
Transcript of DOOR TO DOOR FREIGHT TRANSPORTATION

F O R M U L A T I O N S
DOOR TO DOOR FREIGHT TRANSPORTATION

PROJET RESPET
• Aims to develop quantitative approaches to door to
door freight transportation
• Members:
• LAAS-CNRS
• INRIA
• LIA
• DHL
• JASSP

MAIN GOALS
• Model door to door network operation.
• Take into account conflicting objectives related to the subject
(economical, environmental, QoS, etc).
• Develop a methodology based on exact/hybrid algorithms.
• First year main focus:
• ILP modeling.

SCENARIO
Schedule transportation over a network using consolidation
terminals

MODEL 1
Assume containers are already assembled and ready to
be transported.
• 𝐺 = 𝑁, 𝐴 - graph representing
network;
• 𝑁 – set of terminals 𝑖, 𝑗, … , 𝑘 ;
• 𝐴 – set of routes 𝑖, 𝑗 , … , 𝑗, 𝑘 ;
• 𝑃 – set of containers;
• 𝑇 = *1,… , T+ – set of periods.

MODEL 1 - PARAMETERS
• Terminals:
• 𝑆𝑖 - Storage capacity of terminal 𝑖.
• 𝐶𝑖 - Storage cost of terminal 𝑖.
• 𝛿+ 𝑖 = 𝑗 𝑖, 𝑗 ∈ 𝐴+ – Set of terminals which 𝑖 has a direct
route to.
• 𝛿− 𝑖 = 𝑗 𝑗, 𝑖 ∈ 𝐴+ – Set of terminals that have a direct
route to 𝑖.
• Routes:
• Δ𝑖𝑗 - transportation time between terminals 𝑖 and 𝑗.
• 𝑄𝑖𝑗 - Capacity of route (𝑖, 𝑗).
• 𝐶𝑖𝑗 - Transportation cost of route 𝑖, 𝑗 .

MODEL 1 - PARAMETERS
• Containers:
• 𝜙𝑝 - Release period of container 𝑝.
• 𝜔𝑝 - Deadline period of container 𝑝.
• 𝑜𝑝 - Origin of container 𝑝.
• 𝑑𝑝 - Destination of container 𝑝.
𝜙𝑝 𝜔𝑝

MODEL 1 - OBJECTIVE
• Decision variables:
• 𝑥𝑖𝑗𝑝𝑡 =
1, 𝑖𝑓 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝 𝑖𝑠 𝑠𝑒𝑛𝑡 𝑓𝑟𝑜𝑚 𝑖 𝑡𝑜 𝑗 𝑎𝑡 𝑡 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• 𝑠𝑖𝑝𝑡 = 1, 𝑖𝑓 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝 𝑖𝑠 𝑠𝑡𝑜𝑟𝑒𝑑 𝑎𝑡 𝑖 𝑎𝑡 𝑝𝑒𝑟𝑖𝑜𝑑 𝑡 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• Objective:
• minimize:
( 𝐶𝑖𝑠𝑖𝑝𝑡 + 𝐶𝑖𝑗𝑥𝑖𝑗𝑝
𝑡 )
𝑖,𝑗 ∈𝐴𝑖∈𝑁𝑝∈𝑃𝑡∈𝑇

MODEL 1 - CONSTRAINTS
• Capacity constraints
𝑠𝑖𝑝𝑡
𝑝∈𝑃
≤ 𝑆𝑖 , ∀𝑖 ∈ 𝑁, ∀𝑡 ∈ 𝑇
𝑥𝑖𝑗𝑝𝑡
𝑝∈𝑃
≤ 𝑄𝑖𝑗 , ∀ 𝑖, 𝑗 ∈ 𝐴, ∀𝑡 ∈ 𝑇

MODEL 1 - CONSTRAINTS
• Departure and arrival constraints
𝑥𝑖𝑗𝑝𝑡 = 1
𝑗∈𝛿+(𝑖)
, ∀𝑝 ∈ 𝑃, 𝑖 = 𝑜𝑝
𝜔𝑝
𝑡=𝜙𝑝
𝑥𝑗𝑖𝑝𝑡 = 1
𝑗∈𝛿−(𝑖)
, ∀𝑝 ∈ 𝑃
𝜔𝑡
𝑡=𝜙𝑝
, 𝑖 = 𝑑𝑝

MODEL 1 - CONSTRAINTS
• Flow conservation constraint
𝑠𝑖𝑝𝑡−1 + 𝑥
𝑗𝑖𝑝
𝑡−Δ𝑗𝑖
𝑗∈𝛿−(𝑖)
= 𝑠𝑖𝑝𝑡 + 𝑥𝑖𝑗𝑝
𝑡
𝑗∈𝛿+(𝑖)
,
∀𝑝 ∈ 𝑃, ∀𝑡 ∈ 𝑇, 𝑖 ≠ 𝑜𝑝 ≠ 𝑑𝑝

MODEL 2
Assign orders to containers.
• 𝐿 – set of orders;
• Period of assignment is
not taken into account.
• 𝑃 – set of containers;
• Assume there are as
many containers as
orders ( 𝑃 = |𝐿|);

MODEL 2 - PARAMETERS
• Containers:
• 𝑉𝑝 - Storage capacity of container 𝑝.
• Orders:
• 𝑣𝑙 - weight of order 𝑙;
• 𝜙𝑙 - Release period of order 𝑙;
• 𝜔𝑙 - Deadline period of order 𝑙;
• 𝑜𝑙 - Origin of order 𝑙;
• 𝑑𝑙 - Destination of order 𝑙.

MODEL 2 - OBJECTIVE
• Decision variables:
• 𝑥𝑖𝑗𝑝𝑡 =
1, 𝑖𝑓 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝 𝑖𝑠 𝑠𝑒𝑛𝑡 𝑓𝑟𝑜𝑚 𝑖 𝑡𝑜 𝑗 𝑎𝑡 𝑡 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• 𝑠𝑖𝑝𝑡 = 1, 𝑖𝑓 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝 𝑖𝑠 𝑠𝑡𝑜𝑟𝑒𝑑 𝑎𝑡 𝑖 𝑎𝑡 𝑝𝑒𝑟𝑖𝑜𝑑 𝑡 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• 𝑦𝑙𝑝 = 1, 𝑖𝑓 𝑜𝑟𝑑𝑒𝑟 𝑙 𝑖𝑠 𝑎𝑠𝑠𝑖𝑔𝑛𝑒𝑑 𝑡𝑜 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝. 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• Objective: • minimize:
( 𝐶𝑖𝑠𝑖𝑝𝑡 + 𝐶𝑖𝑗𝑥𝑖𝑗𝑝
𝑡 )
𝑖,𝑗 ∈𝐴𝑖∈𝑁𝑝∈𝑃𝑡∈𝑇

MODEL 2 - CONSTRAINTS
• Capacity constraints
𝑠𝑖𝑝𝑡
𝑝∈𝑃
≤ 𝑆𝑖 , ∀𝑖 ∈ 𝑁, ∀𝑡 ∈ 𝑇
𝑥𝑖𝑗𝑝𝑡
𝑝∈𝑃
≤ 𝑄𝑖𝑗 , ∀ 𝑖, 𝑗 ∈ 𝐴, ∀𝑡 ∈ 𝑇
𝑣𝑙𝑦𝑙𝑝𝑙∈𝐿
≤ 𝑉𝑝, ∀𝑝 ∈ 𝑃

MODEL 2 - CONSTRAINTS
• Assignment constraints
𝑦𝑙𝑝𝑝∈𝑃
= 1, ∀𝑙 ∈ 𝐿
𝑦𝑙𝑝 + 𝑦𝑚𝑝 ≤ 1, ∀𝑝 ∈ 𝑃, ∀𝑙,𝑚 ∈ 𝐿, 𝑑𝑙 ≠ 𝑑𝑚

MODEL 2 - CONSTRAINTS
Origin and destination of each container is unknown apriori.
• Departure and arrival constraints
𝑥𝑖𝑗𝑝𝑡
𝑗∈𝛿+(𝑖)
≥ 𝑦𝑙𝑝, ∀𝑙 ∈ 𝐿, ∀𝑝 ∈ 𝑃, 𝑖 = 𝑜𝑙
𝜔𝑙
𝑡=𝜙𝑙
𝑥𝑗𝑖𝑝𝑡
𝑗∈𝛿−(𝑖)
≥ 𝑦𝑙𝑝, ∀𝑖 ∈ 𝐿, ∀𝑝 ∈ 𝑃, 𝑖 = 𝑑𝑙
𝜔𝑙
𝑡=𝜙𝑙

MODEL 2 - CONSTRAINTS
Origin and destination of each container is unknown apriori.
• Flow conservation constraints
𝑠𝑖𝑝𝑡−1 + 𝑥𝑗𝑖𝑝
𝑡−Δ𝑗𝑖
𝑗∈𝛿−(𝑖)
≤ 𝑠𝑖𝑝𝑡 + 𝑥𝑖𝑗𝑝
𝑡
𝑗∈𝛿+ 𝑖
+ 𝒚𝒍𝒑𝒍∈𝑳𝒅𝒍=𝒊
, ∀𝑝 ∈ 𝑃, ∀𝑖 ∈ 𝑁, ∀𝑡 ∈ 𝑇
𝑠𝑖𝑝𝑡−1 + 𝑥𝑗𝑖𝑝
𝑡−Δ𝑗𝑖
𝑗∈𝛿−(𝑖)
+ 𝒚𝒍𝒑𝒍∈𝑳𝒐𝒍=𝒊
≥ 𝑠𝑖𝑝𝑡 + 𝑥𝑖𝑗𝑝
𝑡
𝑗∈𝛿+ 𝑖
, ∀𝑝 ∈ 𝑃, ∀𝑖 ∈ 𝑁, ∀𝑡 ∈ 𝑇
−1 ≤ 𝑥𝑖𝑗𝑝𝑡
𝑗∈𝛿+ 𝑖
− 𝑥𝑗𝑖𝑝𝑡−Δ𝑗𝑖
𝑗∈𝛿− 𝑖
≤ 1, ∀𝑝 ∈ 𝑃, ∀𝑖 ∈ 𝑁, ∀𝑡 ∈ 𝑇

MODEL 3
Take into account storage of orders
• Pick-up and delivery time
windows for each order;
• Time windows for containers
transportation.
• Additional cost if order is shipped
or arrives outside its time window

MODEL 3 - PARAMETERS
• 𝜙𝑙 - Time window for picking up order 𝑙 or
shipping container 𝑝;
• 𝜔𝑙 - Time window for delivery of order 𝑙 or
arrival of container 𝑝;
• 𝐶𝑙 - Storage cost of order 𝑙.
𝜙𝑙+ 𝜔𝑙
− 𝜔𝑙+ 𝜙𝑙
−
𝜙𝑝+ 𝜔𝑝
− 𝜔𝑝+ 𝜙𝑝
−

MODEL 3 - OBJECTIVE
• Decision variables:
• 𝑥𝑖𝑗𝑝𝑡 =
1, 𝑖𝑓 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝 𝑖𝑠 𝑠𝑒𝑛𝑡 𝑓𝑟𝑜𝑚 𝑖 𝑡𝑜 𝑗 𝑎𝑡 𝑡 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• 𝑠𝑖𝑝𝑡 = 1, 𝑖𝑓 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝 𝑖𝑠 𝑠𝑡𝑜𝑟𝑒𝑑 𝑎𝑡 𝑖 𝑎𝑡 𝑝𝑒𝑟𝑖𝑜𝑑 𝑡 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• 𝑦𝑙𝑝 = 1, 𝑖𝑓 𝑜𝑟𝑑𝑒𝑟 𝑙 𝑖𝑠 𝑎𝑠𝑠𝑖𝑔𝑛𝑒𝑑 𝑡𝑜 𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟 𝑝. 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒
• 𝑧𝑙𝑡 = 1, 𝑖𝑓 𝑜𝑟𝑑𝑒𝑟 𝑙 𝑖𝑠 𝑠𝑡𝑜𝑟𝑒𝑑 𝑎𝑡 𝑝𝑒𝑟𝑖𝑜𝑑 𝑡. 0, 𝑜𝑡𝑒𝑟𝑤𝑖𝑠𝑒

MODEL 3 - OBJECTIVE
• Objective:
• minimize:
( 𝐶𝑖𝑠𝑖𝑝𝑡 + 𝐶𝑖𝑗𝑥𝑖𝑗𝑝
𝑡 )
𝑖,𝑗 ∈𝐴𝑖∈𝑁𝑝∈𝑃𝑡∈𝑇
+ 𝐶𝑙𝑧𝑙𝑡
𝑡∈𝑇𝑙∈𝐿

MODEL 3 - CONSTRAINTS
• Departure and arrival constraints
𝑥𝑖𝑗𝑝𝑡
𝑗∈𝛿+(𝑖)
≥ 𝑦𝑙𝑝, ∀𝑖 ∈ 𝑁, ∀𝑝 ∈ 𝑃
𝜙𝑝+
𝑡=max (𝜙𝑙−,𝜙𝑝−)
𝑥𝑗𝑖𝑝
𝑡 −Δ𝑖𝑗
𝑗∈𝛿−(𝑖)
≥ 𝑦𝑙𝑝, ∀𝑖 ∈ 𝑁, ∀𝑝 ∈ 𝑃
min(𝜔𝑙+,𝜔𝑝+)
𝑡=𝜔𝑝−
𝜙𝑙+ 𝜔𝑙
− 𝜔𝑙+ 𝜙𝑙
−
𝜙𝑝+ 𝜔𝑝
− 𝜔𝑝+ 𝜙𝑝
−

MODEL 3 - CONSTRAINTS
• Order storage constraints
𝑧𝑙𝑡 ≥ 𝑦𝑙𝑝 − 𝑥𝑖𝑗𝑝
𝑡′𝑡
𝑡′=𝜙𝑙+𝑗∈𝛿+ 𝑖
, ∀𝑙 ∈ 𝐿, ∀𝑝 ∈ 𝑃, 𝑡 ∈ 𝜙𝑙+, 𝜙𝑝+ , 𝑖 = 𝑜𝑙
𝑧𝑙𝑡 ≥ 𝑦𝑙𝑝 + 𝑥𝑗𝑖𝑝
𝑡′𝜔𝑙−
𝑡′=𝑡𝑗∈𝛿− 𝑖
− 1, ∀𝑙 ∈ 𝐿, ∀𝑝 ∈ 𝑃, 𝑡 ∈ 𝜔𝑝−, 𝜔𝑙− , 𝑖 = 𝑑𝑙
𝜙𝑙+ 𝜔𝑙
− 𝜔𝑙+ 𝜙𝑙
−
𝜙𝑝+ 𝜔𝑝
− 𝜔𝑝+ 𝜙𝑝
−

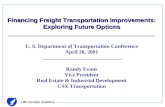
MODEL 4
Take into account different transportation modes and
vehicles
• V1 = A – B – C
• V2 = A – B – D
• V3 = B - C.
• Different mode terminals
and mode transfer arcs
A
B
C
D
A B
C
D

MODEL 4 – TIME SPACE NETWORK
• 𝑹 − 𝒔𝒆𝒕 𝒐𝒇 𝒂𝒍𝒍 𝒗𝒆𝒉𝒊𝒄𝒍𝒆𝒔:
• Each vehicle v is represented by a different network.
• 𝐺𝑟 = (𝑉𝑟 , 𝐴𝑟) - time space network of vehicle 𝑟.
• Transport network is the union of all vehicles
• 𝐺 = (𝑉, 𝐴).
• 𝑉 = 𝑉𝑟𝑟∈𝑅 - All vehicle terminals;
• 𝐴 = 𝐴𝑡 ∪ 𝐴𝑠 ∪ 𝐴𝑚;
• 𝐴 = 𝐴𝑟𝑟∈𝑅 - All vehicle routes;

PERSPECTIVES
• Take into account conflicting objectives related to
the subject (economical, environmental, QoS, etc).
• Develop a methodology based on exact/hybrid
algorithms.

Thank you!