Dolfi-Bouteyre Agnès 19 Coherent Laser Radar Conference thDolfi-Bouteyre Agnès th19 Coherent Laser...
4
Dolfi-Bouteyre Agnès 19 th Coherent Laser Radar Conference CLRC 2018, June 18 – 21 1 Onboard wake vortex tracking with an all fibered Coherent 1.5μm Doppler LIDAR for aircrafts in formation flight Dolfi-Bouteyre Agnès, Goular Didier, Augère Beatrice, Planchat Christophe, Fleury Didier, Lombard Laurent, Valla Matthieu, Besson Claudine. ONERA/ DOTA Université Paris Saclay F 91123 Palaiseau - France [email protected] Abstract: An onboard LIght Detection And Ranging (LIDAR) sensor designed to track wake vortex created by aircrafts in formation flight is presented. It is based on a 1.5-μm pulsed fibered laser and has a very short range detection capability (<30 m) compared to previous sensor designs. I was tested on board an aircraft and was able to detect the two- dimensional (2-D) velocity map of the wake vortex created by another aircraft flying ahead. In addition, it includes a real-time display of the 2D velocity map which enables the operator to locate the vortex center. Data postprocess allowed determining the position of the vortex cores within less than 2 m. Keywords: Coherent Laser Radar, Wake-vortex, Formation flight. 1. Introduction Studies of birds have shown that the V formation can greatly enhance the overall aerodynamic efficiency by reducing the drag and, therefore,increasing the flight distance that they can cover [1].Formation flight for aircraft has been extensively studied during the last 10 years as technology have provided more precise navigation and control systems to maintain formations [2]. Nowdays, close formation flight (such as the ones used by birds or military aircraft) is not possible for commercial flight due to collision hazards. However, distant formation flight with spacing between 10 to 40 wingspans would still be beneficial because of the persistence of cruise wake vortices (WV) of large commercial aircraft. The induced drag reduction was estimated to be up to 30% [2]. At these distances, aircraft tracking error is the most significant contribution to the variation in drag reduction. For the study reported in this article, formation flight tests have been carried out, where a first leading aircraft seeded its wake vortex to enable the pilot of a second following aircraft to visually locate the vortex. We present a scanning coherent pulsed LIDAR installed in the second aircraft that have been developed to precisely locate the vortex core position relative to the aircraft’s wing tip. The seeding of the vortex allowed the LIDAR to detect the WV with a high probability. 2. LIDAR design The main LIDAR requirement is its ability to measure air flow at a distance down to 25 m from the sensor (that correspond to length of the wing) to be able to locate the wake vortex center relative to the wing tip. The technical solutions have been driven by the system performance objective and by technical requirements for airborne operations. Most coherent Doppler LIDAR for wind measurements use long laser pulses of 400 ns to 800 ns FWHM resulting in high spectral accuracy allowing the wind velocity to be precisely measured . However, for these pulse lengths, the optical reflections of the laser pulse on the output optics of the LIDAR generate a strong signal on the detector that makes a blind zone superior to 150 m. When using LIDAR with fiber laser, shorter pulses can be designed reducing the blind zone length. In addition, reducing the pulse length increases the accuracy in the measurement of the wake core position by reducing the spatial integration of the recorded signal [3]. To maintain a spectral resolution Tu10
Transcript of Dolfi-Bouteyre Agnès 19 Coherent Laser Radar Conference thDolfi-Bouteyre Agnès th19 Coherent Laser...

Dolfi-Bouteyre Agnès 19th Coherent Laser Radar Conference
CLRC 2018, June 18 – 21 1
Onboard wake vortex tracking with an all fibered Coherent 1.5µm Doppler LIDAR for aircrafts in formation flight
Dolfi-Bouteyre Agnès, Goular Didier, Augère Beatrice, Planchat Christophe, Fleury Didier, Lombard Laurent, Valla Matthieu, Besson Claudine.
ONERA/ DOTA Université Paris Saclay F 91123 Palaiseau - France
Abstract: An onboard LIght Detection And Ranging (LIDAR) sensor designed to track wake vortex created by aircrafts in formation flight is presented. It is based on a 1.5-µm pulsed fibered laser and has a very short range detection capability (<30 m) compared to previous sensor designs. I was tested on board an aircraft and was able to detect the two-dimensional (2-D) velocity map of the wake vortex created by another aircraft flying ahead. In addition, it includes a real-time display of the 2D velocity map which enables the operator to locate the vortex center. Data postprocess allowed determining the position of the vortex cores within less than 2 m.
Keywords: Coherent Laser Radar, Wake-vortex, Formation flight.
1. Introduction
Studies of birds have shown that the V formation can greatly enhance the overall aerodynamic efficiency by reducing the drag and, therefore,increasing the flight distance that they can cover [1].Formation flight for aircraft has been extensively studied during the last 10 years as technology have provided more precise navigation and control systems to maintain formations [2]. Nowdays, close formation flight (such as the ones used by birds or military aircraft) is not possible for commercial flight due to collision hazards. However, distant formation flight with spacing between 10 to 40 wingspans would still be beneficial because of the persistence of cruise wake vortices (WV) of large commercial aircraft. The induced drag reduction was estimated to be up to 30% [2]. At these distances, aircraft tracking error is the most significant contribution to the variation in drag reduction.
For the study reported in this article, formation flight tests have been carried out, where a first leading aircraft seeded its wake vortex to enable the pilot of a second following aircraft to visually locate the vortex. We present a scanning coherent pulsed LIDAR installed in the second aircraft that have been developed to precisely locate the vortex core position relative to the aircraft’s wing tip. The seeding of the vortex allowed the LIDAR to detect the WV with a high probability.
2. LIDAR design
The main LIDAR requirement is its ability to measure air flow at a distance down to 25 m from the sensor (that correspond to length of the wing) to be able to locate the wake vortex center relative to the wing tip. The technical solutions have been driven by the system performance objective and by technical requirements for airborne operations. Most coherent Doppler LIDAR for wind measurements use long laser pulses of 400 ns to 800 ns FWHM resulting in high spectral accuracy allowing the wind velocity to be precisely measured . However, for these pulse lengths, the optical reflections of the laser pulse on the output optics of the LIDAR generate a strong signal on the detector that makes a blind zone superior to 150 m. When using LIDAR with fiber laser, shorter pulses can be designed reducing the blind zone length. In addition, reducing the pulse length increases the accuracy in the measurement of the wake core position by reducing the spatial integration of the recorded signal [3]. To maintain a spectral resolution
Tu10

Dolfi-Bouteyre Agnès 19th Coherent Laser Radar Conference
CLRC 2018, June 18 – 21 2
compatible with accurate wake vortex characterization, 250 ns FWHM laser pulses are typically used leading to a blind zone of 40 to 50 m. In our case, the blind zone must be shorter than 25 m, so that pulse length shorter than 160 ns with steep edge had to be used (Gaussian pulse shape could not be used as the foot could compromise the first range gates).
In Fibered Coherent Doppler LIDARs developed at ONERA, laser sources are based on “Master Oscillator Power Fiber Amplifier” (MOPFA). The master oscillator is a 1545-nm low–phase-noise narrow-linewidth Laser Module and the pulses are generated by a Fiber Coupled Acousto-Optique Modulator (AOM). The pulse length is usually limited by the rising/falling time of the AOM. In Wind LIDARs, AOM with 100-ns rising time are typically used to generate 200 ns to 800 ns pulses. In this study, we used a 10-ns rising/falling time AOM to generate the short pulses. The fiber amplifier is a custom made amplifier adapted to amplify such short pulses.
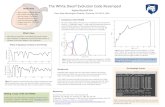
Figure 1 : Temporal profile of the laser pulse (ordinate is in dB)
The generated pulse is 150 ns long at -30 dB after amplification (Figure 1).The LIDAR blind zone is shorter than 23 m.
In order to optimize measurements from 25 m to 250 m, a LIDAR aperture diameter of 40 mm has been chosen combined with a focalization distance of about 100 m.
Another critical point of the LIDAR design is the difference in speed between the aircraft and the air that can reduce the measurement dynamics. The LIDAR has been designed to measure the wake vortex position in flight with a side slip angle up to 5 degrees (in absolute value), to determine the projection of the aircraft velocity on the LIDAR axis between about ∓20 m/s. During flying tests, the velocity range chosen for real time display was [-30 m/s +30 m/s] to account for the aircraft velocity projection.(Figure 3)
Because of the short pulse, the accuracy in velocity measurement was low (+/-1.5 m/s at CNR(Carrier to Noise Ratio) = -20 dB to +/- 0.5 m/s at CNR= -14 dB). However, this accuracy was good enough to detect and locate the wake vortex using an appropriate signal processing program to determine its core from the WV velocity signatures.
3. Fligth tests
The optical head, composed of the laser and all the optical components, were installed in a 73 cm x 44 cm x18 cm box suitable for flight certification (Figure 2). The laser electrical power and control, the scanner power and control, a rackable computer dedicated to acquire the signal, the real time signal processing and display were installed in the flight test bay.
Five flights were set with two aircrafts in formation flight configuration (left picture in figure 2) the lead aircraft seeding the vortex. Measurements were also possible without seeding the vortex when contrails where presents. Different parameters were varied: the distance between the two aircrafts varied from 0.5

Dolfi-Bouteyre Agnès 19th Coherent Laser Radar Conference
CLRC 2018, June 18 – 21 3
NM to 2 NM, the spacing between the closest vortex and the LIDAR (horizontal axis) varied from 30 m to 200 m and the estimated vortex core height with respect to the aircraft wing (vertical axis) varied from +20 to -20 m. Real time display of the CNR and of the velocity maps were available for the flight test engineer. This real time display enabled to give directions to the pilot to precisely position the aircraft wing tip relatively to the vortex core. The LIDAR was operated during 12 tests flight hours. During the flight tests, approximately 11000 scans were recorded. More than 5000 scans contained detectable wake vortices.
Figure 2: left: Formation flight test configuration; right: LIDAR for formation flight installed in the test aircraft.
Figure 3: An example of an onboard real-time display (which corresponds to two successive scans in each window created by Labview®) is presented. The horizontal and vertical axis corresponds to the distance along the laser axis and the time respectively. The color scale represents the airspeed in m/s.
4. Vortex core tracking
A post processing algorithm has been developed to detect and locate the wake vortex center using averaged air motion velocity maps (an example is presented in figure 3). It has been optimized for artificially seeded wake vortices. This algorithm work in three steps: (i) the wake vortex detection, (ii) the core angle position and calculation, and (iii) the vortex core distance on the laser axis calculation. Figure 4 shows two examples of post processing output, including the location of the vortex core (68 m and 31 m from the LIDAR respectively).
To estimate the bias and error associated with this signal processing, 600 simulations of the lidar output signals were conducted for various vortex positions and using random LIDAR noise. Figure 5 shows the histogram of the wake vortex distance error for the closest vortex (blue) and the furthest vortex (red).
(a.u)
(m)
Spe
ed (m
/s)

Dolfi-Bouteyre Agnès 19th Coherent Laser Radar Conference
CLRC 2018, June 18 – 21 4
Figure 4 : Two examples of post processing outputs. The determined vortex core positions are shown (black
crosses).
Figure 5 : Histogram of wake vortex distance error for the closest vortex (blue) and the furthest vortex (red).
The averaged bias is equal to 1.3 m for vortices closer than 100 m and equal to -0.3 m for vortices further than 100 m. The associated standard deviations are approximately 0.7 m and 0.6 m respectively. These results fulfill the requirements.
5. Conclusions
An on-board LIDAR sensor for wake vortex tracking for aircrafts flying in formation flight is presented. The sensor, based on pulsed 1.5-µm fibered laser, has a very short range detection capability (<30 m). A real time display of the velocity maps enables the flight test engineer to give directions to the pilot to precisely position the vortex core relatively to the aircraft wing tip. The LIDAR has been operated during 12 tests flight hours and has provided a huge amount of data that are still being processed.
6. References
[1]. Lissaman, P. B. S., & Shollenberger, C. A. (1970). Formation flight of birds. Science, 168(3934), 1003-1005).
[2]. Ning, S. A., Flanzer, T. C., & Kroo, I. M. (2011). Aerodynamic performance of extended formation flight. Journal of aircraft, 48(3), 855-865.
[3]. Dolfi-Bouteyre, A., Augere, B., Valla, M., Goular, D., Fleury, D., Canat, G., ... & Cariou, J. P. (2009). Aircraft wake vortex study and characterization with 1.5 µm fiber Doppler lidar,. AerospaceLab Journal, AL01-07.