Distributed Formation Control without a Global Reference Frame · Distributed Formation Control...
6
Distributed Formation Control without a Global Reference Frame Eduardo Montijano, Dingjiang Zhou, Mac Schwager and Carlos Sagues Abstract— This paper presents a decentralized controller to drive a team of agents to reach a desired formation in the absence of a global reference frame. Each agent is able to measure its relative position and orientation with respect to its neighbors. The different orientations imply that the relative positions between pairs of agents are sensed differently for each agent. In order to reach the desired configuration, the agents use two simultaneous consensus controllers, one to control their relative orientations, and another for their relative positions. The convergence to the desired configuration is shown by comparing the system with time-varying orientations with the equivalent approach with fixed rotations, showing that their difference vanishes as time goes to infinity. While the analysis in the paper is performed in a 2-dimensional space with orientations belonging to SO(2), our approach can be extended to handle 3 dimensions and orientations in SO(3). Simulation results, as well as hardware experiments with two quadrotor UAVs, corroborate the theoretical findings of the paper. I. I NTRODUCTION Formation control is one of the cornerstone problems in decentralized control. Many multi-agent tasks require the agents to reach and maintain a given formation. In some applications all the agents need to travel with the same orientation in order to maintain the desired formation, for example for formation flying in fixed wing UAVs [1], or for some cooperative sensing scenarios [2]. In other applica- tions agents are required to keep a formation with different orientations, such as aerial manipulation [3], environmental monitoring [4], or distributed escorting [5]. This need to maintain relative orientations as well as positions motivates the work in this paper. Among existing formation control approaches, we can distinguish between leader-follower strategies and solutions based on nearest neighbor rules. Solutions of the first kind allow each agent to specify its movement depending only on a particular “leader” agent within the formation. Exam- ples of controllers of this type have been presented using vision [6], considering relative bearing measurements [7], and including obstacle avoidance [8], to name a few. On the other hand, nearest-neighbor approaches let each agent design its motion using locally available information [9] from nearby agents. Nearest neighbor approaches frequently E. Montijano is with Centro Universitario de la Defensa (CUD) and Instituto de Investigaci´ on en Ingenier´ ıa de Arag´ on (I3A), Zaragoza, Spain. [email protected] D. Zhou and M. Schwager are with Department of Mechanical Engineer- ing, Division of Systems Engineering, Boston University, United States. [email protected] and [email protected] C. Sagues is with Departamento de Inform´ atica e Ingenier´ ıa de Sistemas - Instituto de Investigaci´ on en Ingenier´ ıa de Arag´ on (I3A), Universidad de Zaragoza, Spain. [email protected] This work was funded in part by the projects DPI2012-32100, CUD2013- 05, and in part by NSF grant CNS-1330008. We are grateful for this support. depend on a consensus-type control algorithm, and they have the advantage that they are robust to a broad range of interaction topologies between the team of agents. Another important issue in the formation control problem is the specification of the desired configuration. The most common way of defining the formation is in terms of the relative information between pairs of agents. Depending on the onboard sensors, some approaches work with relative bearings [10], [11], relative distances [12], [13], or relative positions [14]–[16]. However, a constant assumption in all of these approaches is the presence of a common rotation reference frame. In some cases it is because agents are mod- eled as d-dimensional points without orientations whereas in others it is assumed that there exist a previous agreement about a common rotation frame, e.g., [17]. The difficulty with controlling orientation as well as po- sition is that the rotation matrix appears as a multiplicative nonlinearity in the position kinematics of the agents. Hence the system in this case is nonlinear. We present a new consensus-based formation controller that is proven to drive the agents to the desired formation despite this nonlinearity. While consensus-based controllers have been deeply studied for positions [15], [16] and rotations [18], [19] indepen- dently, to the best of our knowledge there are no results analyzing the non-linear system that describes the evolution of the positions of the agents due to the variation of the rotation frames. Thus, the chief novelty in our problem lies in controlling both relative position and orientation for the agents at the same time. In this paper we show that, with the proposed controller, the kinematics have a structure that allows the orientation consensus to be proven first. Then the position consensus can be analyzed with the rotation matrix treated as a time- varying term that approaches a known limit. We prove that the coupled positions and orientations converge to a desired relative configuration. Additionally, while the analysis is done considering agents moving in SE(2), the proposed control scheme is also well designed to work on SE(3). To conclude, we also validate our proposal with simulations and in hardware experiments with two quadrotor UAVs. The remainder of the paper is organized as follows: In Section II we introduce the notation of the paper and provide a formal definition of the problem we solve. Section III dis- cusses the position controller when the agents have constant, but different rotation frames. The general case, with varying rotation frames is studied in Section IV. Simulation results are shown in Section V. Finally, Section VI presents the conclusions of the work and future lines of research. 2014 American Control Conference (ACC) June 4-6, 2014. Portland, Oregon, USA 978-1-4799-3271-9/$31.00 ©2014 AACC 3862
Transcript of Distributed Formation Control without a Global Reference Frame · Distributed Formation Control...

Distributed Formation Control without a Global Reference Frame
Eduardo Montijano, Dingjiang Zhou, Mac Schwager and Carlos Sagues
Abstract— This paper presents a decentralized controller to
drive a team of agents to reach a desired formation in the
absence of a global reference frame. Each agent is able to
measure its relative position and orientation with respect to
its neighbors. The different orientations imply that the relative
positions between pairs of agents are sensed differently for each
agent. In order to reach the desired configuration, the agents
use two simultaneous consensus controllers, one to control their
relative orientations, and another for their relative positions.
The convergence to the desired configuration is shown by
comparing the system with time-varying orientations with the
equivalent approach with fixed rotations, showing that their
difference vanishes as time goes to infinity. While the analysis
in the paper is performed in a 2-dimensional space with
orientations belonging to SO(2), our approach can be extended
to handle 3 dimensions and orientations in SO(3). Simulation
results, as well as hardware experiments with two quadrotor
UAVs, corroborate the theoretical findings of the paper.
I. INTRODUCTION
Formation control is one of the cornerstone problems indecentralized control. Many multi-agent tasks require theagents to reach and maintain a given formation. In someapplications all the agents need to travel with the sameorientation in order to maintain the desired formation, forexample for formation flying in fixed wing UAVs [1], orfor some cooperative sensing scenarios [2]. In other applica-tions agents are required to keep a formation with differentorientations, such as aerial manipulation [3], environmentalmonitoring [4], or distributed escorting [5]. This need tomaintain relative orientations as well as positions motivatesthe work in this paper.
Among existing formation control approaches, we candistinguish between leader-follower strategies and solutionsbased on nearest neighbor rules. Solutions of the first kindallow each agent to specify its movement depending onlyon a particular “leader” agent within the formation. Exam-ples of controllers of this type have been presented usingvision [6], considering relative bearing measurements [7],and including obstacle avoidance [8], to name a few. Onthe other hand, nearest-neighbor approaches let each agentdesign its motion using locally available information [9]from nearby agents. Nearest neighbor approaches frequently
E. Montijano is with Centro Universitario de la Defensa (CUD) andInstituto de Investigacion en Ingenierıa de Aragon (I3A), Zaragoza, [email protected]
D. Zhou and M. Schwager are with Department of Mechanical Engineer-ing, Division of Systems Engineering, Boston University, United [email protected] and [email protected]
C. Sagues is with Departamento de Informatica e Ingenierıa de Sistemas- Instituto de Investigacion en Ingenierıa de Aragon (I3A), Universidad deZaragoza, Spain. [email protected]
This work was funded in part by the projects DPI2012-32100, CUD2013-05, and in part by NSF grant CNS-1330008. We are grateful for this support.
depend on a consensus-type control algorithm, and theyhave the advantage that they are robust to a broad rangeof interaction topologies between the team of agents.
Another important issue in the formation control problemis the specification of the desired configuration. The mostcommon way of defining the formation is in terms of therelative information between pairs of agents. Depending onthe onboard sensors, some approaches work with relativebearings [10], [11], relative distances [12], [13], or relativepositions [14]–[16]. However, a constant assumption in allof these approaches is the presence of a common rotationreference frame. In some cases it is because agents are mod-eled as d-dimensional points without orientations whereas inothers it is assumed that there exist a previous agreementabout a common rotation frame, e.g., [17].
The difficulty with controlling orientation as well as po-sition is that the rotation matrix appears as a multiplicativenonlinearity in the position kinematics of the agents. Hencethe system in this case is nonlinear. We present a newconsensus-based formation controller that is proven to drivethe agents to the desired formation despite this nonlinearity.While consensus-based controllers have been deeply studiedfor positions [15], [16] and rotations [18], [19] indepen-dently, to the best of our knowledge there are no resultsanalyzing the non-linear system that describes the evolutionof the positions of the agents due to the variation of therotation frames. Thus, the chief novelty in our problem liesin controlling both relative position and orientation for theagents at the same time.
In this paper we show that, with the proposed controller,the kinematics have a structure that allows the orientationconsensus to be proven first. Then the position consensuscan be analyzed with the rotation matrix treated as a time-varying term that approaches a known limit. We prove thatthe coupled positions and orientations converge to a desiredrelative configuration. Additionally, while the analysis isdone considering agents moving in SE(2), the proposedcontrol scheme is also well designed to work on SE(3).To conclude, we also validate our proposal with simulationsand in hardware experiments with two quadrotor UAVs.
The remainder of the paper is organized as follows: InSection II we introduce the notation of the paper and providea formal definition of the problem we solve. Section III dis-cusses the position controller when the agents have constant,but different rotation frames. The general case, with varyingrotation frames is studied in Section IV. Simulation resultsare shown in Section V. Finally, Section VI presents theconclusions of the work and future lines of research.
2014 American Control Conference (ACC)June 4-6, 2014. Portland, Oregon, USA
978-1-4799-3271-9/$31.00 ©2014 AACC 3862

II. NOTATION AND PROBLEM SETUP
In the paper we consider a team of N agents labeledby V = {1, . . . , N}. We let Fw be some fixed (unknown)reference frame for the agents and F
i
be the frame of agenti. The state of the agent i expressed in Fw is defined by itsposition, p
i
= [xi
, yi
]
T , and orientation, i
. We denote byR
i
the rotation matrix associated to i
:
Ri
=
✓cos(
i
) � sin( i
)
sin( i
) cos( i
)
◆.
Each agent is able to move with holonomic differentialkinematics with respect to its own frame. Expressed in theworld frame this is:
˙pi
= Ri
vi
(1)
with vi
= [vxi , vyi ]
T the linear velocity in the local x and ydirections of agent i and
˙ i
= wi
(2)
with wi
the angular velocity, also in the local frame of agenti. Under the kinematics described in (2), the time derivativeof the rotation matrix, R
i
, is equal to
˙Ri
= Ri
Si
,
with Si
the skew-symmetric matrix associated to wi
,
Si
=
✓0 �w
i
wi
0
◆.
We let p = [pT
1 , . . . ,pT
N
]
T denote the concatenation ofthe positions of all the agents and = [ 1, . . . , N
]
T theconcatenation of all the orientations.
Given two agents, we denote by pij
and ij
the relativeposition and orientation of agent j measured in the frameF
i
. The relative position between the agents is described by
pij
= [xij
, yij
]
T
= RT
i
(pj
� pi
), (3)
whereas the relative orientation is determined by the angle ij
that generates the rotation matrix
Rij
= RT
i
Rj
.
The objective of the agents is to end up in a configurationdefined by the desired relative positions and orientations, p⇤
ij
and ⇤ij
, between them.Assumption 2.1: (Realizable configuration). The desired
configuration can be achieved by the team, in the sense thatall the relative positions and orientations are consistent witheach other. Formally speaking, it must hold that
p⇤ij
= p⇤ik
+R⇤ik
p⇤kj
and R⇤ij
= R⇤ik
R⇤kj
, (4)
for all i, j, k 2 V , with ⇤ik
the angle that generates therotation matrix R⇤
ik
.Note that there are infinite sets of positions in Fw for theagents such that they satisfy (4), all of them related bysome rotation and translation. Also note that in generalpij
6= �pji
.
Let G = (V, E) be the interaction graph between theagents. The nodes in the graph, V , are associated to thedifferent agents, whereas the edges, (i, j) 2 E , representthe availability of the relative position and orientation ofagent j, [p
ij
, ij
], to agent i. The set of neighbors of agenti is defined as the set of agents perceived by agent i, i.e.,N
i
= {j 2 V | (i, j) 2 E}, and |Ni
| its cardinality. LetL = [l
ij
] be the Laplacian matrix associated to G:
lij
=
8<
:
|Ni
| if i = j�1 if (i, j) 2 E and i 6= j0 otherwise
.
Assumption 2.2: (Connected, undirected graph). The in-teraction graph, G, is connected and undirected, i.e., thereexist a path joining any two nodes and (i, j) 2 E , (j, i) 2E .It is well known that under this assumption L has one eigen-value, �1 = 0, with associated right (and left) eigenvector1
N
= [1, . . . , 1]T 2 RN , and the rest of eigenvalues are allstrictly positive. Along the paper, we let `
i
denote the ith rowof the Laplacian matrix. Additionally, in the paper I
k
, k 2 N,denotes the identity matrix of dimension k⇥k. To conclude,the Kronecker product between two matrices is representedby A⌦B.
III. FORMATION CONTROL WITH FIXED ROTATIONFRAMES
Let us start by assuming that the agents have fixed, but notnecessarily equal, rotation frames, that satisfy the followingassumption:
Assumption 3.1: (Fixed desired orientations). The initialorientations of the agents are such that
ij
= ⇤ij
for alli, j 2 V .Consequently, in this scenario, R
ij
= R⇤ij
and wi
= 0 forall i, j 2 V . The analysis of this simplified case will helpus to demonstrate in the next section the convergence tothe desired formation pattern of the general case with time-varying rotations.
The controller used by the agents is a standard consensuscontroller of the form:
vi
= KX
j2Ni
�pij
� p⇤ij
�, K > 0. (5)
The following lemma will be useful for the analysis ofboth, the fixed and the time-varying rotations cases.
Lemma 3.2: (Eigenvalues of the “relative” Laplacian).Under Assumption 2.2 (Connected, undirected graph), thematrices L and L�1
N
`1 have exactly the same eigenvalues.Proof: Since L is symmetric, it is diagonalizable. Thus,
we can find an orthogonal matrix P, such that P�1= PT
andPTLP = ⇤ (6)
is a similarity transformation, with ⇤ = diag(�1 =
0,�2, . . . ,�N ) the diagonal matrix containing all the eigen-values of L. Additionally, note that the columns of P containthe set of (normalized) eigenvectors of L, with the specialcase of the first column, equal to 1
N
/pN . Now, if we
3863

multiply L � 1N
`1 by PT and P on the left and rightrespectively, we get:
PT
(L� 1N
/`1)P = ⇤�PT1N
/`1P. (7)
Noting that `11N
= 0
`1P = (0,�2�12, . . . ,�N�1N ) , (8)
with �1i the first component of the ith eigenvector of L, and,
PT1N
=
⇣N/
pN, 0, . . . , 0
⌘T
. (9)
Therefore ⇤�PT1N
`1P is an upper triangular matrix, withthe same elements in the diagonal as ⇤. Recalling that thematrix transformation given by PT and P preserves theeigenvalues, we conclude that the matrix L� 1
N
`1 has thesame eigenvalues as the matrix L.
Remark 3.3: (Eigenvectors of the “relative” Laplacian).Although the eigenvalues of L and L�1
N
`1 are the same, theeigenvectors of the two matrices are not necessarily equal.In fact, while the right eigenvector of L�1
N
`1 associated to�1 is the same as the one for L, i.e., 1
N
, the left eigenvectorof the former matrix associated to �1 is ⇣1 = (1, 0, . . . , 0)T ,which is different than 1
N
. These eigenvectors will be usedlater in the analysis.
Proposition 3.4: (Convergence with fixed rotationframes). Let Assumptions 2.1 (Realizable configuration),2.2 (Connected, undirected graph) and 3.1 (Fixed desiredorientations) be true. Then, using the controller in (5) thepositions of the agents evolve in such a way that
lim
t!1pij
= p⇤ij
, 8i, j 2 V.
Proof: For the sake of clarity, and without loss ofgenerality, along the proof we consider K = 1 in eq. (5).Let us define the change of variables
qi
= p1i � p⇤1i. (10)
Using (3) and (4) and Assumption 3.1
pij
= R⇤i1(p1j � p1i) (11)
and similarly p⇤ij
= R⇤i1(p
⇤1j � p⇤
1i). Note that in the(unknown) global frame R⇤
i1 = RT
i
R1 for some fixed Ri
and R1, which are also the rotation matrices that appearin (1). Thus
˙pi
= R1
X
j2Ni
(qj
� qi
). (12)
Differentiating (10),
˙qi
= RT
1 ( ˙pi
� ˙p1) =
X
j2Ni
(qj
� qi
)�X
k2N1
(qk
� q1),
which, denoting q = (q1, . . . ,qN
)
T , yields in vectorial form
˙q = � [(L� 1N
`1)⌦ I2]q. (13)
By Lemma 3.2, the matrix � (L� 1N
`1), has one eigen-value equal to zero, and the rest of eigenvalues strictlynegative. Thus
lim
t!1q =
✓1N
⇣T
1
⇣T
1 1N
⌦ I2
◆q(0) = 1
N
q1(0), (14)
with ⇣1 = (1, 0, . . . , 0)T . However, note that q1 is alwaysconstant and equal to 0, and therefore q ! 0. Consequentlyp1i tends to p⇤
1i for all i, and because of Assumption 2.1the result is proved.
Remark 3.5: (Comparison with [15]) The controllerin (5) is similar to the one in [15], with the exception that itallows the agents to have different (but fixed) rotation frames.The analysis in the proof of Proposition 3.4 is also somewhatdifferent to accommodate these different rotations. We willleverage this intermediate result to prove our main result withtime-varying rotation frames in the next section.
IV. FORMATION CONTROL WITH TIME-VARYINGROTATION FRAMES
In this section we analyze the full system when both thetranslation and the rotation evolve in the time.
Initially, we require to make an assumption about theinitial orientations of the agents:
Assumption 4.1: (Relative initial orientations). The initialrelative orientations satisfy
max
i2V( 1i � ⇤
1i)�min
j2V( 1j � ⇤
1j) < ⇡. (15)
As in the previous section, we consider that the linearvelocities of the agents are defined according to (5), whereasin order to reach the desired relative rotations, the agentsexecute the consensus controller:
wi
=
X
j2Ni
� ij
� ⇤ij
�. (16)
Theorem 4.2: (Convergence with time-varying rotationframes) Let Assumptions 2.1 (Realizable configuration), 2.2(Connected, undirected graph) and 4.1 (Relative initial ori-entations) be true. Then, using the controller in (5) and (16)the positions and orientations of the agents evolve in such away that
lim
t!1pij
= p⇤ij
, and lim
t!1 ij
= ⇤ij
,
for all i, j 2 V.Proof: For the sake of clarity, and without loss of
generality, along the proof we consider K = 1 in eq. (5).According to the kinematics in (1) and (2), using the controlinputs in (5) and (16) the evolution of the orientations isdecoupled from the positions of the agents. This impliesthat we can analyze the orientations separately and studyafterwards what happens with the positions of the agentswith the time-varying rotation frames.
In order to prove the convergence of the orientations wedefine the change of variables ✓
i
= 1i � ⇤1i and ✓ =
(✓1, . . . , ✓N )
T . Note that the new variables also representrotations in the manifold SO(2). Assumption 4.1 ensuresthat all these new rotations are contained in a ball of radius⇡ with respect to some reference frame, a necessary con-dition in order to reach consensus when measuring relativeorientations [18], [20].
After some manipulations, the kinematics of ✓ can beexpressed by
˙✓ = �(L� 1N
`1)✓.
3864

Using similar arguments as in Proposition 3.4 we reach
lim
t!1✓ =
1N
⇣T
1
⇣T
1 1N
✓(0) = ✓1(0)1N
, (17)
and since ✓1 = 0 for all t, 1i converges to ⇤1i for all i.
Finally, because of Assumption 2.1 we conclude that all thepairs of agents reach their desired relative rotations.
At this point we know that the rotations asymptoticallyconverge to a constant value such that R
ij
= R⇤ij
andw
i
= 0 for all the agents. We also know that controller (5)with constant rotations reaches the desired configuration.However, these two arguments do not guarantee that theagents will end up with the desired relative positions. A newanalysis of the positions is required.
In order to simplify the notation, let us define
b⇤i
=
X
j2Ni
p⇤ij
and b⇤= [b⇤
1, . . . ,b⇤N
]
T . The kinematics of the positions inthe world frame can be expressed now by
˙p = �(L⌦ I2)p� diag(Ri
)b⇤,
with diag(Ri
) = diag(R1, . . . ,RN
) 2 R2N⇥2N the blockdiagonal matrix defined by the N rotational matrices of theagents in the (unknown) global frame. Note that, in terms ofp, this kinematics corresponds to a non-homogeneous lineartime-variant system, because R
i
changes with the time, butwith a known evolution.
Let us consider the change of variables
qi
= p1i = RT
1 (pi
� p1), (18)
that transforms all the positions relative to agent 1. Using (3)and (4)
pij
= pi1 +R
i1p1j = �Ri1p1i +R
i1p1j
= RT
i
R1(p1j � p1i).(19)
Hence
˙pi
= Ri
X
j2Ni
pij
�Ri
b⇤i
= R1
X
j2Ni
(qj
� qi
)�Ri
b⇤i
.
Differentiating (18) and using some algebra,
˙qi
=
˙RT
i
(pi
� p1) +RT
1 ( ˙pi
� ˙p1)
= ST
1 qi
+
X
j2Ni
(qj
� qi
)�RT
1 Ri
b⇤i
�
�X
k2N1
(qk
� q1) + b⇤1,
(20)
and, piling the variables q = (q1, . . . ,qN
)
T ,
˙q =
⇥IN
⌦ ST
1 � (L� 1N
`1)⌦ I2⇤q�
�diag(R1i)b⇤+ b⇤
1 ⌦ 1N
,(21)
with diag(R1i) = diag(R11, . . . ,R1N ) 2 R2N⇥2N theblock diagonal matrix defined by the N relative rotationalmatrices of the agents with respect to agent 1.
In order to analyze the new system, we are going to com-pare it with the time-invariant system described in section IIIwith fixed rotations. To distinguish them, in the proof wewill denote by ¯p the system with fixed rotations. Similarly,we let ¯q be the same change of variables as in (18), whosekinematics is
˙
¯q = � [(L� 1N
`1)⌦ I2] ¯q�diag(R⇤1i)b
⇤+b⇤
1⌦1N
, (22)
with diag(R⇤1i) defined as diag(R1i) with the desired relative
rotations.Let us denote
e = q� ¯q, (23)
the difference between the two relative positions. Using (21)and (22), the evolution in the time of e is given by
˙e = We+ �, (24)
withW =
⇥IN
⌦ ST
1 � (L� 1N
`1)⌦ I2⇤, (25)
and
� =
�IN
⌦ ST
1
�¯q+ (diag(R⇤
1i)� diag(R1i))b⇤. (26)
Let us remark that even when e depends on ¯q, the evolutionof this variable is known, and for that reason it can also beput as a part of � (the same cannot be said about q becauseits evolution is still unknown).
The system in (24) is another non-autonomous lineartime-varying system, because both W and � change withthe time. In order to demonstrate that it converges to zerolet us first consider the autonomous version of (24), i.e,� = 0 for all times. Consider the following candidateLyapunov function V = eT e, which is positive definite andhas time derivative equal to ˙V = 2eTWe. Replacing Wby the expression in (25), since ST
1 is a skew symmetricmatrix, eT
�IN
⌦ ST
1
�e = 0 for any value of w1. Recalling
Lemma (3.2),
2eT (� (L� 1N
`1)⌦ I2) e �2�2kek2,
with �2 the second smallest eigenvalue of L, which becauseof Assumption 2.2 is strictly positive. Then, the system (24)is input-to-state stable (Lemma 4.6 in [21]).
Additionally, it holds that lim
t!1 � = 0 because weknow that lim
t!1 R1i = R⇤1i for all i and lim
t!1 wi
=
0 ) lim
t!1 ST
i
= 0. Therefore, using again [21] weconclude that e converges to zero. Consequently, for all iit holds that
lim
t!1qi
= lim
t!1¯qi
= p⇤1i,
and by Assumption 2.1 we conclude that all the pairs ofagents also reach their desired relative positions.
Remark 4.3: (Analysis in the local frame). Note that thepart of the proof of Theorem 4.2 dealing with the positionscannot be analyzed in the global frame. The reason for thisis that the final positions of the robots in the global frameare different in the case of fixed rotations and time-varyingrotations, i.e., lim
t!1 p� ¯p 6= 0.
3865

!20 !15 !10 !5 0 5 10 15 20
!15
!10
!5
0
5
10
15
1
2
3
4
5
6
7
8
9
10
Desired Configuration
X(m)
Y(m
)
!25 !20 !15 !10 !5 0 5 10 15
!15
!10
!5
0
5
10
15
X(m)
Y(m
)
Initial Configuration
1
2
3
4
5
6
7
8
9
10
!25 !20 !15 !10 !5 0 5 10 15
!15
!10
!5
0
5
10
X(m)
Y(m
)
Trajectories and Final Configuration
1
23
4
5
6
78
9
10
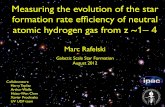
Fig. 1. Distributed formation control with time-varying rotation frames. The figure shows the desired configuration (left), the initial configuration (middle)and the trajectories with the final configuration of the agents (right).
Remark 4.4: (Extension to time-varying topologies). Al-though we do not prove it in the paper, it should be notedthat, considering that our approach is based on standardconsensus-controllers, the team of agents will also be able toform in the desired pattern in a scenario with time-varyinginteraction topologies, given the standard requirements ofbounded dwell time and periodic joint connectivity [9].
Remark 4.5: (Extension to three dimensions). The for-mulation used in the paper makes our approach easilyextensible to SE(3). The only requirement is to find anappropriate consensus controller that ensures convergenceof the orientations of the agents in SO(3) with relativemeasurements and without taking into account the relativepositions. Fortunately, there are already existing works inthe literature that present solutions to this problem, e.g., [20],[22]. In such case, if the agents use the position controllergiven in (5), the analysis presented here is still valid and thus,the convergence to the desired relative 3D configuration.
V. SIMULATIONS AND EXPERIMENTS
In this section we validate the theoretical results of thepaper with an illustrative example using a simulated en-vironment as well as with hardware experiments with twoquadrotor UAVs.
A. Simulation Results
In this section we demonstrate the behavior of our forma-tion controller with an illustrative example carried out usingMATLAB. We consider a team of N = 10 mobile agents.We design the desired formation such that the agents areequally spaced around the perimeter of a circle, oriented sothat they are all pointing outward from the circle. This isshown in the left plot of Fig. 1, where the configuration isshown in the world frame.
The initial configuration of the agents is depicted in themiddle plot of Fig. 1, and is chosen such that the anglecondition in Assumption 4.1 is satisfied. The trajectories ofthe positions as well as the final orientation of the agentsobtained using the proposed controller can be seen in theright plot of Fig. 1. As proven in Theorem 4.2, we canobserve that the team has reached the configuration with allthe relative positions and orientations equal to the desired
ones, despite each one having a different reference frame.Note that in the left plot of Fig. 1 we are using the worldframe for simplicity in depicting the desired relative positionsof the agents, but, as in fact happens, the final positions ofthe agents in the global frame (right plot of Fig. 1) are givenby a rigid body transformantion than those of the left one.However, the relative positions and orientations between theagents are equal in both cases.
B. Hardware ExperimentsHere we present the results of an experiment with
two quadrotor robots in a motion capture environmentto verify the performance of the controller. The robotsused in the experiments are KMel kQuad500 quadrotors(http://kmelrobotics.com/). The position and ori-entation of the quadrotors are observed by an OptiTrackmotion capture system (NaturalPoint, Inc, http://www.naturalpoint.com/optitrack/) at an update rate120Hz and obtained by MATLAB via Java scripts readingUDP packets from the OptiTrack system.
Fig. 2. System diagram.
The desired trajectory for each quadrotor is computed inMATLAB using the control law described in (5) and (16).This trajectory is implemented for the quadrotors using adifferential-flatness based trajectory following controller, thedetails of which can be found in [23]. The desired angularand linear accelerations for realizing the desired trajectoryare then sent over a ZigBee wireless link to the quadrotorsto close the control loop. Figure 2 shows a diagram of thisexperimental setup.
3866

(a) Experiment
(b) Simulation
Fig. 3. This figure shows a composite photograph of the experiment ontop, with the corresponding MATLAB simulation below it. The quadrotorsstart at the far left and right of the frame, and move to the bottom and top,respectively.
The results of our experiment are shown in Fig. 3, with acomposite photograph of the experiment on the top, and thecorresponding MATLAB simulation on the bottom. One cansee from the figure that the experimental results match thesimulation well. The quadrotors change both their orientationand position in moving from their initial configuration (withthe robots at the far left and right of the frame), to their finalconfiguration (with the robots facing upward and downwardat the top and bottom of the frame).
VI. CONCLUSIONS
In this paper we have presented a distributed consensuscontroller that drives a team of agents to reach a desiredformation with specified relative positions and orientations inthe absence of a global reference frame. Although the time-varying rotations make the system dynamics nonlinear, thestructure of our approach has allowed us to separate the anal-ysis in the rotations and the positions. The convergence to thedesired configuration has been shown demonstrating that thedifference between the system with time-varying orientationsand an equivalent system with fixed rotations approacheszero in time. Additionally, the proposed structure makesthe extension to 3 dimensions and orientations in SO(3)
straightforward, provided that the agents use an appropriateconsensus controller for SO(3). We have demonstrated thefeasibility of the theoretical analysis in a simulated scenario
and with a hardware implementation using two quadrotorUAVs. Current research is being devoted to the estimation ofthe relative positions on-board by means of computer vision.
REFERENCES
[1] R. Fierro, C. Belta, J. Desai, and V. Kumar. On controlling aircraftformations. In 40th IEEE Conference on Decision and Control, pages1065–1070, 2001.
[2] F. Zhang and N. E. Leonard. Cooperative filters and control forcooperative exploration. IEEE Transactions on Automatic Control,55(3):650–663, March 2010.
[3] N. Michael, J. Fink, and V. Kumar. Cooperative manipulation andtransportation with aerial robots. Autonomous Robots, 30(1):73–86,January 2011.
[4] M. Schwager, B. Julian, M. Angermann, and D. Rus. Eyes in the sky:Decentralized control for the deployment of robotic camera networks.Proceedings of the IEEE, 99(9):1541–1561, Sept 2011.
[5] Y. Lan, Z. Lin, M. Cao, and G. Yan. A distributed reconfigurablecontrol law for escorting and patrolling missions using teams ofunicycles. In 49th IEEE Conference on Decision and Control, pages5456–5461, December 2010.
[6] A. Das, R. Fierro, V. Kumar, J. Ostrowski, J. Spletzer, and C. J. Taylor.Vision based formation control of multiple robots. IEEE Transactionson Robotics and Automation, 18(5):813–825, Oct 2002.
[7] T. Gustavi and X. Hu. Observer-based leader-following formationcontrol using onboard sensor information. IEEE Transactions onRobotics, 24(6):1457–1462, Dec 2008.
[8] P. Urcola and L. Montano. Cooperative robot team navigationstrategies based on an environment model. In IEEE/RSJ InternationalConference on Intelligent Robots and Systems, pages 4577–4583,October 2009.
[9] A. Jadbabaie, J. Lin, and A.S. Morse. Coordination of Groups ofMobile Autonomous Agents using Nearest Neighbor Rules. IEEETransactions on Automatic Control, 48(6):988–1001, June 2003.
[10] M. Basiri, A. N. Bishop, and P. Jensfelt. Distributed control oftriangular formations with angle-only constraints. Systems & ControlLetters, 59(1):147–154, Jan 2010.
[11] A. Franchi and P. R. Giordano. Decentralized control of parallel rigidformations with direction constraints and bearing measurements. In51th IEEE International Conference on Decision and Control, pages5310–5317, Dec 2012.
[12] M. Cao, C. Yu, and B. D.O. Anderson. Formation control using range-only measurements. Automatica, 47(4):776–781, April 2011.
[13] K-K Oh and H-S Ahn. Formation control of mobile agents based oninter-agent distance dynamics. Automatica, 47(10):2306–2312, Oct2011.
[14] H. Bai, M. Arcak, and J. T. Wen. Using orientation agreement toachieve planar rigid formation. In American Control Conference, pages753–758, 2008.
[15] J. Cortes. Global and robust formation-shape stabilization of relativesensing networks. Automatica, 45(12):2754–2762, Dec 2009.
[16] W. Ren. Collective motion from consensus with cartesian coordinatecoupling. IEEE Transactions on Automatic Control, 54(6):1330–1335,June 2009.
[17] A. Gasparri and M. Franceschelli. On agreement problems withgossip algorithms in absence of common reference frames. In IEEEInternational Conference on Robotics and Automation, pages 4481–4486, May 2010.
[18] N. Mostagh and A. Jadbabaie. Distributed geodesic control laws forflocking of nonholonomic agents. IEEE Transactions on AutomaticControl, 52(4):681–686, April 2007.
[19] E. Montijano, J. Thunberg, X. Hu, and C. Sagues. Epipolar visualservoing for multi-robot distributed consensus. IEEE Transactions onRobotics, 29(5):1212–1225, Oct 2013.
[20] J. Thunberg, E. Montijano, and X. Hu. Distributed attitude synchro-nization control. In 50th IEEE Conference on Decision and Controland European Control Conference, pages 1962–1967, December 2011.
[21] H. K. Khalil. Nonlinear Systems. Third Edition. Prentice Hall, 2002.[22] A. Sarlette and R. Sepulchre. Consensus optimization on manifolds.
SIAM Journal on Control Optimization, 48(1):56–76, January 2009.[23] D. Zhou and M. Schwager. Vector field following for quadrotors using
differential flatness. In IEEE International Conference on Robotics andAutomation, May 2014. To Appear.
3867


















