Distributed and Pointwise Control for Parabolic...
37
Distributed and Pointwise Control for Parabolic PDE: A Numerical Approach L. Héctor Juárez V. and Diana A. León Departamento de Matemáticas–UAM Iztapalapa International Workshop on Statistical and Computational Methods for Inverse Problems
Transcript of Distributed and Pointwise Control for Parabolic...

Distributed and Pointwise Control forParabolic PDE: A Numerical Approach
L. Héctor Juárez V. and Diana A. León
Departamento de Matemáticas–UAM Iztapalapa
International Workshop on Statistical and Computational Methodsfor Inverse Problems

Control Problem
A control problem consists of:
1. An input–output process (controled system).
2. Observations of the output of the controled system.
3. An objective to be achieved.
Interest: Drive the system to a state that satifies a prescribed criteriumor objective. We are interested in systems modeled by PDE.
Input: A function υ ←→ (control variable)
Output: Solution y of the PDE ←→ (state of the system)

Controls y objetives
The control (input) υ can be a function:
I Defined on the boundary.
I Defined in a subdomain.
I The initial condition.
I One of the parameters.
Objetives: we can seek a control υ to:
I Minimize a criterium or cost: optimal control.
I Reach an observable state: controllability problem.
I Stabilize a system or a state: stabilization problem.

Example: cathodic protectionA metal placed in a corrosive electrolyte tends to ionize and dissolve. To prevent corro-sion, another metal (less noble) can be placed in the electorlyte to form an electrochem-ical cell.
In this process the noble metal plays the role of cathode, and the other one the roleof anode. A current i can be prescribed to the anode to modify the electric field in theelecrolyte. This system is described by
−∇ · (σ∇φ) = 0, in Ω,
−σ∂σ
∂n= i on Γa, 0 on ΓN , g(φ) on Γc
g(φ) is the cathodic polarization function (nolinear).

The cathode is protected if the electric potential is close to a givenvalue φ on Γc .
Here, the control is i , the output is φ and the objective is to minimizethe following functional:
J(φ) =
∫Γc
(φ− φ
)2 dΓ
where (φ, i) ∈ H1(Ω)× L2(Γa) y a ≤ i ≤ b.
A compromise between cathodic protection and consumed energy canbe obtained from the minimization of
J(φ) =
∫Γc
(φ− φ
)2 dΓ + α
∫Γa
i2 dΓ.

Example: stabilization of a bending beam
Equations of motion of the Timoshenko beam:
ρ∂2u∂t2 − K
(∂2u∂x2 −
∂φ
∂x
)= 0 in (0,L),
Iρ∂2φ
∂t2 − EI∂2φ
∂x2 + K(φ− ∂u
∂x
)= 0 in (0,L),
u(0, t) = φ(0, t) = 0, t ≥ 0.
I u: deflection of the beam.
I φ: angle of rot. of cross sections.
I ρ: mass density per unit length.
I EI: flexural rigiditey of the beam.
I Iρ: mass moment of inertia.
I K : shear modulus.

If a boundary control force f1 and a control moment f2 is applied atx = L, the boundary conditions are
K [φ(L, t)− ux (L, t) ] = f1(t) for t ≥ 0−EI φx (L, t) = f2(t) for t ≥ 0,
Stabilization problem
Find f1 and f2 so that the energy of the beam
E(t) =12
∫ L
0
ρu2
t (t) + Iρ φ2t (t) + K [φ(t)− ux (t) ]2 + EI φ2
x (t)
dx
decay to zero (asymtoticaly and uniformly).

Example: identification of a pollution source
A model for the dispersion of a pollutant in water is
∂y∂t− ν ∆y + v0 · ∇y = s(t) δa in Ω× (0,T )
∂y∂n
= 0 on Γ× (0,T )
y(x ,0) = y0(x) in Ω
I y(x , t), pollutant concentration.
I ν, water vscosity.
I v0, water velocity.
I s(t), flow rate of pollution.
I a ∈ K , source position, (K ⊂ Ωcompact).

Identification problem
We suppose that the concentration of the pollutant yobs(x , t) can bemeasured in a subset O ∈ Ω in an interval of time [0,T ].
Problem: Find the pollution source a ∈ K that minimizes
J(y) =
∫ T
0
∫O
(y − yobs)2 dx
Related problem: Estimate de flow rate s(t), satisfying a priory boundssl ≤ s(t) ≤ su. This is when the pollution source is known but notaccessible.

Model problem: Parabolic PDE
Let Ω ∈ Rd , Γ = ∂Ω, T > 0
Q = Ω× (0,T ), Σ = Γ× (0,T )
State equation: Given y0 ∈ L2(Ω), findy = y(x , t) such that
∂y∂t
+A y = f in Q,
y = 0 on Σ,
y(0) = y0, in Ω.
Possibilities for Aφ:
−∆φ, −∇ · (A∇φ), −∇ · (A∇φ) + v0 ·∇φ

Properties of operator A
Linear and continous
A : H1(Ω) −→ H−1(Ω)
Elliptic 〈Aφ, φ〉 ≥ α ‖φ‖2H1
0 (Ω).
Selfadjoint 〈Aφ, φ〉 = 〈φ,Aφ〉.
Unique solution: y ∈ L2(0,T ; H1
0 (Ω)),
∂y∂t∈ L2
(0,T ; H−1(Ω)
).
The solution y is continous from [0,T ] to L2(Ω)
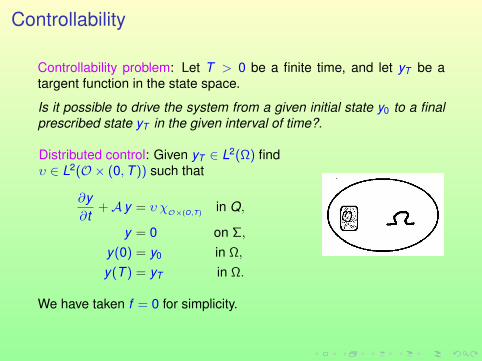
Controllability
Controllability problem: Let T > 0 be a finite time, and let yT be atargent function in the state space.
Is it possible to drive the system from a given initial state y0 to a finalprescribed state yT in the given interval of time?.
Distributed control: Given yT ∈ L2(Ω) findυ ∈ L2(O × (0,T )) such that
∂y∂t
+A y = υ χO×(O,T )in Q,
y = 0 on Σ,
y(0) = y0 in Ω,
y(T ) = yT in Ω.
We have taken f = 0 for simplicity.

Exact and approximate controllability
Exact controllability
The system is controlable (or axactly controlable) when there exists acontrol υ for each target yT .
Exact controllability es very strict and it is not always possible. So, inpractice the condition y(T ) = yT is relaxed by the less restricted
Approximate controllability
In this case we look for a control υ that drives the system, in a finitetime T > 0, to a state y(T ; υ) within a small neighboorhood of yT .
More precisely: Let B be the unit ball in L2(Ω), we look for a control υsuch that
y(T ; υ) ∈ yT + εB, for ε small.

Reformulation as an optimal control
The following density result tell us that, for the approximate controla-bility problem, there are infinitely many possible controls.
If υ spans L2(O×(0,T )), then y(T ; υ) spans an affine dense subspacein L2(Ω).
We compute the control with minimal norm:
inf12
∫ T
0
∫Ω
υ2 dx dt , υ ∈ L2(O × (0,T )), y(T ; υ) ∈ yT + εB
This problem has a unique solution. Moreover
I T > 0, can be choosen arbitrarily small.
I O ⊂ Ω, may be choosen arbitrarily small.

Penalization
Alternative: The optimal control problem can be reformulated:
inf Jk (υ) =12
∫ T
0
∫Ω
υ2 dx dt +k2‖y(T ; υ)− yT‖2
L2(Ω) υ ∈ L2(O×(0,T )).
Result: There exists k large enough, such that the minimun uk of Jkverifies:
‖y(T ; uk )− yT‖ ≤ ε (k ∝ 1/ε)
I The solution can be reached by methods acting directly on thecontrol υ.
I We can also apply convex duality theory.

Optimality system
The minimum uk of Jk (υ) satisfies the following optimality system:
∂y∂t
+A y = ψ χO×(O,T )in Q, y(0) = 0, y = 0 sobre Σ
−∂ψ∂t
+A∗ ψ = 0 in Q, ψ(T ) = k (yT − y(T )), ψ = 0 on Σ.
uk = ψ χO×(O,T )

Operational formulation
1. Define the following operator Λ : L2(Ω) −→ L2(Ω):
Λ g = yg(T ),
where given g ∈ L2(Ω), we obtain
I ψg , form the solution of
−∂ψ∂t
+A∗ ψ = 0 en Q, ψ(T ) = g, ψ = 0 sobre Σ.
I yg , from the solution of
∂y∂t
+A y = ψg χO×(O,T )en Q, y(0) = 0, y = 0 sobre Σ
2. If we denote k (yT − y(T )) by u, then u solves
(k−1I + Λ) u = yT .

The operational equation
Lu = yT , with L =(k−1I + Λ
)is the Euler–Lagrange equation of a quadratic minimization problem,
then we can apply a gradient descent method to solve it.
Once u is obtained, the control is found by solving first
−∂ψ∂t
+A∗ ψ = 0 en Q,
ψ(T ) = u, en Ω,
ψ = 0 sobre Σ.
Therefore, the control is uk = ψ χO×(O,T ).

Comjugate gradient algorithm
1. Inicialization: Given u0, compute g0 = Lu0 − yT and d0 = −g0.
2. Descent: Assuming we know uk , gk , dk , find uk+1, gk+1,dk+1
doing the following
uk+1 = uk + αk dk , with αk =〈gk , gk 〉〈dk , Ldk 〉
gk+1 = gk + αk Ldk
Test of convergence: If ‖gk+1‖ ≤ ε‖g0‖, take u∗ = uk+1 andstop. Otherwise, go to step 3.
3. New conjugate direction
dk+1 = −gk+1 + βk dk , with βk =〈gk+1,gk+1〉〈gk , gk 〉
Do k = k + 1 and go to step 2.

Numerical examplesIn all cases we solved the state and adjoint equations by the finiteelement method with ∆x = ∆ t = 0.01.
∂y∂t− ∂2y∂x2 = υ χO×(0, T )
in Q = (0,1)× (0,T ),
y = 0 on Σ = Γ× (0,T )
y(0) =
x , x ≤ 1/2;1− x , x > 1/2.
y(T ) = yT
Example 1. (smooth target) yT = 4x(1− x)
Example 2. (nonsmooth target) yT =
8(x − 14 ), if 1/4 ≤ x ≤ 1/2,
8( 34 − x), if 1/2 ≤ x ≤ 3/4,
0, otherwise.
Example 3. (nonsymmetric target) yT = 4 x (1− x) (x − 1/8)

Example 1. Smooth target
yT = 4x(1− x)
|y(T )−yT ||yT | = 0.03 Evolution of the control υ
I Subdomain: O = (0.4, 0.6).
I Final time: T = 2.
I Tolerance: ε = 10−10

Example 2. Nonsmooth target
|y(T )−yT ||yT | = 0.21 Evolution of the control υ
I Subdomain: O = (0.4, 0.6).
I Final time: T = 2.
I Tolerance: ε = 10−10

Example 3. Nonsymmetric target
|y(T )−yT ||yT | = 0.0012
I Subdomain: O = (0, 1).
I Final time: T = 1.
I Tolerance: ε = 10−10

Pointwise control
Problem: Given yT , find υ and y such that
∂y∂t− µ
∂2y∂x2 = υ(t)δ(x − b) in Q = (0,1)× (0,T ),
y = 0 on Σ = Γ× (0,T ),
y(0) = 0y(T ) = yT
I The state equation has a unique solution for each υ ∈ L2(0,T ).
I For d ≤ 3, y ∈ L2(Q), and ∂y∂t ∈ L2(0,T ; H−2(Ω)).
I t −→ y(t ; υ) is continuous from [0,T ] into H−1(Ω).
I When υ spans L2(0,T ) then y(T ) = y(T ; υ) spans a subspaceof H−1(Ω)

Orthogonal of the closure of y(T ; υ)υ∈L2(0,T )
〈y(T ; υ), f 〉 =
∫ T
0ψ(b, t) υ(t) dt , f ∈ H1
0 (ω).
I 〈·, ·〉 is the duality pairing between H−1(Ω) and H10 (Ω).
I ψ is the solution of the adjoint equation
−∂ψ∂t
+A∗ψ = 0 in Ω, ψ(T ) = f , ψ = 0 on Σ.
I ψ ∈ L2(0,T ; H2(Ω) ∩ H10 (Ω)).
Therefore, f is ortogonal to y(T ; υυ∈L2(0,T ) ⇐⇒ ψ(b, t) = 0
and
y(T ; υ) spans a dense subset of H−1(Ω) when υ spans L2(0,T )⇐⇒b is such that ψ(b, t) = 0 implies ψ = 0.

Strategic points
Let ωj∞j=1 be the eigenfunctions of A = A∗, and λj∞j=1 thecorresponding eigenvalues.
We say that b is an strategic point in Ω if ωj (b) 6= 0 for all j = 1,2, . . ..
Then ψ(b, t) = 0 implies ψ = 0, since
ψ(x ,T ) = f (x) =∑
j
fj ωj (x), for f ∈ H10 (Ω),
ψ(b, t) =∑
j
fj ωj (b) e−λj (T−t) = 0, only if fj = 0 ∀ j .

Optimal controlSuppose b ∈ Ω is an stategic point. We look for the solution of
infυ∈V
J(υ) =12
∫ T
0υ2 dt
with V = υ ∈ L2(0,T ) : y(T ; υ) ∈ yT + β B−1, and yT ∈ H−1(Ω)and B−1 the unit ball in H−1(Ω).
This problem can be solved using duality arguments. However, fromthe practical point of view, it is easier to solve directly the followingpenalized problem
minυ∈L2(0,T )
Jk (υ) =12
∫ T
0υ2 dt +
k2‖y(T ; υ)− yT‖2
−1, k > 0,
where ‖g‖−1 = ‖ϕg‖H10 (Ω) and ϕg solution of
−4ϕg = 0 in Ω, ϕg = 0 in Γ.

Optimality conditionsThe previous problem has a unique solution u ∈ L2(0,T ), characteri-zad by the existence of p ∈ L2(0,T ; H2(Ω)∩H1
0 (Ω))∩C0([0,T ]; H10 (Ω)),
such that u, y ,p satisfies the following optimality system
∂y∂t
+A y = u δ(x − b) in Q, y = 0 on Σ, y(0) = 0,
−∂p∂t
+A∗ y = 0 in Q, p = 0 on Σ, p(T ) = k(−4)−1(yT − y(T ; u)),
u(t) = p(b, t).
This problem, or equivalently the minimization problem, can be solvedby a gradient descent method, since we can compute its derivative(first variation)∫ T
0J ′k (u) υ dt =
∫ T
0(u(t)− p(b, t)) υ(t) dt , ∀ υ ∈ L2(0.T ).
We apply a conjugate gradient algorithm very similar to the one intro-duced before.

Example 1.

Target function
yT =
8(x − 1
4 ), if 14 ≤ x ≤ 1
2 ,
8( 34 − x), if 1
2 ≤ x ≤ 34 ,
0, otherwise.
Parameters
T = 3, ∆x = ∆t = 10−2.
b k N. Iter ||uk (x ,T )||2L||yT−ym(T )||L2(Ω)
||yT ||L2(Ω)√2
3 103 3 34.1939 0.6249104 4 61.7933 0.3942105 6 79.3059 0.2789106 10 114.3000 0.2184108 26 700.2412 0.14151010 103 3.0216×103 0.1242
12 103 3 34.2446 0.6193
104 4 61.8262 0.3766105 6 82.3173 0.2251106 8 122.8655 0.1289108 15 194.5858 0.05851010 30 874.9293 0.0340
π6 103 3 34.2239 0.6246
104 4 61.8236 0.3934105 6 80.0432 0.2762106 10 115.5124 0.2178108 25 670.0066 0.14221010 144 2.7191×103 0.1235

Example2.

Unsymmetric target
yT =274
x2 (1− x) ,
Same parameters
b k N. Iter ||uk (x ,T )||2L||yT−ym(T )||L2(Ω)
||yT ||L2(Ω)√2
3 105 6 73.8552 0.3859106 11 154.3000 0.3444108 37 1.4870×103 0.14361010 105 2.3732×103 0.02281012 91 2.4727×103 0.01641015 89 2.4743×103 0.0164
12 105 6 65.2239 0.3731
106 7 78.0479 0.3572108 14 103.5828 0.35371010 15 128.9864 0.35361012 15 130.0881 0.35361015 15 130.0995 0.3536
π6 105 6 62.9638 0.3455
106 10 98.5060 0.3231108 26 1.3323×103 0.15251010 60 2.3923×103 0.02671012 61 2.5580×103 0.01921015 61 2.5606×103 0.0192

Chattering Control
The eigenfunctions associated to operator A = −µ ∂2
∂x2 , with homogeneosDirichlet boundary conditions are:
ωj (x) =sin(jπx)
|| sin(jπx)||L2(Ω). (1)
In order to be able to control de system, the control point b must be an strate-gic point :
sin(jπb) 6= 0 ∀j ∈ N,
that is, b ∈ I.
Computers don’t “know” irrational numbers, and it is necessary to move thecontrol point in order to rebuild the control, avoiding tha anulation of all eigen-functions. For instance, we can move the control point b in an oscillatory way:
c(t) = b + ε sin (2πf t) , b ∈ Q,
with ε > 0, f > 0.

No chattering
Chattering

Target function
yT =274
x2(1− x),
ParametersT = 3, ∆x = ∆t = 10−2,
b = 1/2
ε k N. Iter||yT−ym(T )||L2(Ω)
||yT ||L2(Ω)
0 105 6 0.3731106 7 0.3572108 14 0.35371010 15 0.3536
0.001 105 6 0.3731106 10 0.3551108 37 0.25811010 111 0.0859
0.08 105 10 0.2843106 18 0.1741108 95 0.04661010 530 0.0162
0.1 105 9 0.2669106 20 0.1510108 170 0.0406

No chattering
Chattering

Target function
yT =
8(x − 1
2 ), if 14 ≤ x ≤ 3
4 ,
8(1− x), if 34 ≤ x ≤ 1,
0, otherwise.
Parameters
T = 3, ∆x = ∆t = 10−2, b = 1/2
ε k N. Iter||yT−ym(T )||L2(Ω)
||yT ||L2(Ω)
0 105 6 0.7617106 7 0.7218108 22 0.70941010 29 0.7079
0.001 105 6 0.7627106 10 0.7180108 46 0.49921010 218 0.1397
0.08 105 10 0.5898106 23 0.3135108 136 0.0790
0.1 105 9 0.5488106 20 0.2636108 143 0.0675


















