Discrete element method simulations of Mars Exploration ...wheel-drive rovers with rocker-bogie...
10
Discrete element method simulations of Mars Exploration Rover wheel performance Jerome B. Johnson a,⇑ , Anton V. Kulchitsky a , Paul Duvoy a , Karl Iagnemma b , Carmine Senatore b , Raymond E. Arvidson c , Jeffery Moore d a University of Alaska Fairbanks, Institute of Northern Engineering, P.O. Box 755910, Fairbanks, AK 99775-5910, USA b Massachusetts Institute of Technology, Robotic Mobility Group, Laboratory for Manufacturing and Productivity, 77 Massachusetts Ave., Cambridge, MA 02139, USA c Washington University in St. Louis, Campus Box 1169, One Brookings Dr., St. Louis, MO 63130, USA d NASA Ames Research Center, MS 245-3, Moffett Field, CA 94035-1000, USA Received 5 July 2014; received in revised form 11 February 2015; accepted 14 February 2015 Available online 11 March 2015 Abstract Mars Exploration Rovers (MERs) experienced mobility problems during traverses. Three-dimensional discrete element method (DEM) simulations of MER wheel mobility tests for wheel slips of i = 0, 0.1, 0.3, 0.5, 0.7, 0.9, and 0.99 were done to examine high wheel slip mobility to improve the ARTEMIS MER traverse planning tool. Simulations of wheel drawbar pull and sinkage MIT data for i 6 0.5 were used to determine DEM particle packing density (0.62) and contact friction (0.8) to represent the simulant used in mobility tests. The DEM simulations are in good agreement with MIT data for i = 0.5 and 0.7, with reasonable but less agreement at lower wheel slip. Three mobility stages include low slip (i < 0.3) controlled by soil strength, intermediate slip (i 0.3–0.6) controlled by residual soil strength, and high slip (i > 0.6) controlled by residual soil strength and wheel sinkage depth. Equilibrium sinkage occurred for i < 0.9, but continuously increased for i = 0.99. Improved DEM simulation accuracy of low-slip mobility can be achieved using polyhedral particles, rather than tri-sphere particles, to represent soil. The DEM simulations of MER wheel mobility can improve ARTEMIS accuracy. Ó 2015 The Authors. Published by Elsevier Ltd. on behalf of ISTVS. This is an open access article under the CC BY-NC-SA license (http:// creativecommons.org/licenses/by-nc-sa/4.0/). Keywords: Mars Exploration Rovers; Discrete element method simulation; Mobility testing; Wheel slip 1. Introduction 1.1. Mars Exploration Rovers project and the importance of mobility In January 2004, two Mars Exploration Rovers (MERs) 1 – Spirit and Opportunity – landed on the floor http://dx.doi.org/10.1016/j.jterra.2015.02.004 0022-4898/Ó 2015 The Authors. Published by Elsevier Ltd. on behalf of ISTVS. This is an open access article under the CC BY-NC-SA license (http://creativecommons.org/licenses/by-nc-sa/4.0/). ⇑ Corresponding author at: University of Alaska Fairbanks, Institute of Northern Engineering, P.O. Box 755910, Fairbanks, AK 99775-5910, USA. Tel.: +1 907 474 1986; fax: +1 907 474 7041. E-mail addresses: [email protected] (J.B. Johnson), anton. [email protected] (A.V. Kulchitsky), [email protected] (P. Duvoy), [email protected] (K. Iagnemma), [email protected] (C. Senatore), [email protected] (R.E. Arvidson), jeff[email protected] (J. Moore). 1 ARTEMIS – Adams-based rover terramechanics and mobility inter- action simulator; CAD – computer-aided design; COUPi – controllable objects unbound particles interaction; DEM – discrete element method; DP – drawbar pull; MERs – Mars Exploration Rovers; MIT – Massachusetts Institute of Technology; MMS – Mojave Martian simulant; PD – packing density; RMG – robotics mobility group www.elsevier.com/locate/jterra Available online at www.sciencedirect.com ScienceDirect Journal of Terramechanics 62 (2015) 31–40 Journal of Terramechanics
Transcript of Discrete element method simulations of Mars Exploration ...wheel-drive rovers with rocker-bogie...

Available online at www.sciencedirect.com
Journal
www.elsevier.com/locate/jterra
ScienceDirect
Journal of Terramechanics 62 (2015) 31–40
ofTerramechanics
Discrete element method simulations of Mars Exploration Roverwheel performance
Jerome B. Johnson a,⇑, Anton V. Kulchitsky a, Paul Duvoy a, Karl Iagnemma b,Carmine Senatore b, Raymond E. Arvidson c, Jeffery Moore d
a University of Alaska Fairbanks, Institute of Northern Engineering, P.O. Box 755910, Fairbanks, AK 99775-5910, USAb Massachusetts Institute of Technology, Robotic Mobility Group, Laboratory for Manufacturing and Productivity, 77 Massachusetts Ave.,
Cambridge, MA 02139, USAc Washington University in St. Louis, Campus Box 1169, One Brookings Dr., St. Louis, MO 63130, USA
d NASA Ames Research Center, MS 245-3, Moffett Field, CA 94035-1000, USA
Received 5 July 2014; received in revised form 11 February 2015; accepted 14 February 2015Available online 11 March 2015
Abstract
Mars Exploration Rovers (MERs) experienced mobility problems during traverses. Three-dimensional discrete element method(DEM) simulations of MER wheel mobility tests for wheel slips of i = 0, 0.1, 0.3, 0.5, 0.7, 0.9, and 0.99 were done to examine high wheelslip mobility to improve the ARTEMIS MER traverse planning tool. Simulations of wheel drawbar pull and sinkage MIT data fori 6 0.5 were used to determine DEM particle packing density (0.62) and contact friction (0.8) to represent the simulant used in mobilitytests. The DEM simulations are in good agreement with MIT data for i = 0.5 and 0.7, with reasonable but less agreement at lower wheelslip. Three mobility stages include low slip (i < 0.3) controlled by soil strength, intermediate slip (i � 0.3–0.6) controlled by residual soilstrength, and high slip (i > 0.6) controlled by residual soil strength and wheel sinkage depth. Equilibrium sinkage occurred for i < 0.9, butcontinuously increased for i = 0.99. Improved DEM simulation accuracy of low-slip mobility can be achieved using polyhedral particles,rather than tri-sphere particles, to represent soil. The DEM simulations of MER wheel mobility can improve ARTEMIS accuracy.� 2015 The Authors. Published by Elsevier Ltd. on behalf of ISTVS. This is an open access article under the CCBY-NC-SA license (http://creativecommons.org/licenses/by-nc-sa/4.0/).
Keywords: Mars Exploration Rovers; Discrete element method simulation; Mobility testing; Wheel slip
http://dx.doi.org/10.1016/j.jterra.2015.02.004
0022-4898/� 2015 The Authors. Published by Elsevier Ltd. on behalf of ISTV
This is an open access article under the CC BY-NC-SA license (http://creativeco
⇑ Corresponding author at: University of Alaska Fairbanks, Institute ofNorthern Engineering, P.O. Box 755910, Fairbanks, AK 99775-5910,USA. Tel.: +1 907 474 1986; fax: +1 907 474 7041.
E-mail addresses: [email protected] (J.B. Johnson), [email protected] (A.V. Kulchitsky), [email protected](P. Duvoy), [email protected] (K. Iagnemma), [email protected] (C. Senatore),[email protected] (R.E. Arvidson), [email protected](J. Moore).
1. Introduction
1.1. Mars Exploration Rovers project and the importance of
mobility
In January 2004, two Mars Exploration Rovers(MERs)1 – Spirit and Opportunity – landed on the floor
S.
mmons.org/licenses/by-nc-sa/4.0/).
1 ARTEMIS – Adams-based rover terramechanics and mobility inter-action simulator; CAD – computer-aided design; COUPi – controllableobjects unbound particles interaction; DEM – discrete element method;DP – drawbar pull; MERs – Mars Exploration Rovers; MIT –Massachusetts Institute of Technology; MMS – Mojave Martian simulant;PD – packing density; RMG – robotics mobility group

32 J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40
of Gusev Crater and the plains of Meridiani, respectively(Squyres et al., 2004a,b). The mission objectives includedexploration of the terrains and outcrops of the two sites,using MERs to access key targets and the Athena SciencePayload to conduct remote sensing and in situ measure-ments. With a science theme of “Follow the Water,” therovers sought evidence for the interaction of water withcrustal materials, both in surface and subsurface environ-ments. At Gusev Crater, Spirit found evidence for carbon-ates, opaline silica, and hydrated sulfate minerals, likelygenerated in ancient fumarole or hydrothermal environ-ments (Arvidson et al., 2010; Squyres et al., 2008). Onthe plains of Meridiani, Opportunity discovered evidencefor sulfate-rich sandstones originally formed in shallowlake environments and later reworked by wind and water(Grotzinger et al., 2005). More recently Opportunity hasexplored the rim of the ancient 22 km wide Endeavour Craterand found evidence for clay minerals formed in rocks thatpredate the crater, providing evidence for early warm, wetconditions with only mildly acidic and non-oxidizing con-ditions (Arvidson et al., 2014a). These conditions wouldhave been suitable for life. None of these discoveries wouldhave been possible without the ability to traverse fromplace to place, much as a field geologist would do to unrav-el the geologic history and paleoenvironmental conditionsfor a terrestrial sedimentary or volcanoclastic rock record.Before becoming embedded in sands at the Troy site andlosing contact, Spirit traversed �10 km from 2004 until2010 (Arvidson et al., 2010). Opportunity has traversed�39 km across the plains of Meridiani and the rim ofEndeavour and is presently heading toward an extensiveoutcrop of smectite clays, identified using hyperspectralimaging capabilities on the Mars Reconnaissance Orbiter.
1.2. MER mobility challenges and their impact on Mars
exploration
Most traverses on Mars have not presented mobilitychallenges for either Spirit or Opportunity. These six-wheel-drive rovers with rocker-bogie suspension systemshave proven to be capable explorers, crossing soil-covered plains strewn with embedded and surface rocks,with wheel sinkages measured in a couple centimetersand rover-based three-dimensional (3-D) slip, measuredusing visual odometry, ranging from a few percent to�15% (Maimone et al., 2007). Both rovers have beenable to climb rock-covered slopes of �15–20� withoutdifficulty. There have been occasional problems. Oppor-tunity experienced high wheel sinkage and rover-basedslip while trying to cross wind-blown ripples (Zhouet al., 2014), and Spirit had mobility difficulty crossinghighly deformable sulfate-rich sands (Arvidson et al.,2010). In some instances, wheel slip approached 100%for both rovers (Sullivan et al., 2011).
For Opportunity, the egregious situations occurredwhen all six wheels were on the flanks of ripples and therover was attempting an ascent. The soil was highly
deformable, and the rear wheels, carrying most of the load,were subject to high sinkage, increased compaction resis-tance, and increased slip. The front wheels, because of theirdecreased load, were unable to help the rover up and overthe ripple flank, which led to incipient embedding eventsand cessation of forward motion (Arvidson et al., 2011).Backing out took a number of attempts, and increased carewas then given to avoid driving the rover up and over rip-ple flanks. Instead, ripples were crossed where the field hadgaps or the ripples were small.
Once Spirit crossed the hard pack soil and embeddedand strewn rocks of Gusev plains and moved onto theColumbia Hills, traversing became occasionally problemat-ic. The main mobility issues occurred while traversinglocally low regions where high deformable sulfate-rich soilshave accumulated. These soils, buried beneath a thin coverof basaltic sands, were not discernable when planning thetraverse. The rover’s wheels underwent significant sinkage(5–10 cm) while crossing these areas, thus increasingcompaction resistance and slippage. Having occurred atPaso Robles, this problem precluded a traverse beyondthe Tyrone area. High sinkage events became par-ticularlyproblematic when Spirit’s right front-wheel-driveactuator failed and the rover dragged the wheel during itstraverses, leading to a final embedding event in the Troyarea, when the rover entered a shallow 8 m wide, sulfate-sand-filled crater named Scamander. The left side of therover tilted in the crater, and the left wheels became embed-ded in the sand. Maneuvers to extricate the rover were notsuccessful, and in March 2010, communications with Spiritwere lost as winter season approached and power becamereduced for this solar-powered vehicle (Arvidson et al.,2010).
1.3. MER mobility modeling needs and approach
Opportunity’s incipient embedding events during itsattempted ripple crossings and the problems encounteredby Spirit during its traverses across highly deformablesulfate-rich sands revealed that our ability to modelwheel-soil and rover mechanical interactions with soil-covered terrains needed significant improvements. Moretesting was needed to understand the dynamics of inter-actions, as well as how to traverse without embeddingor how to extricate a rover once high sinkage andembedding occurred. These events led to increasedchecks during traverses for incipient embedding events,including monitoring rover-based slip using visual odo-metry, together with rover tilts and movements thatled to extreme bogie and rocker joint angles.
When Spirit became embedded in Scamander Crater, anextensive set of sandbox tests were conducted with the engi-neering rover model to replicate the Mars soil conditionsaffecting Spirit’s mobility. Considerations related to differ-ences between Earth and Mars gravity and an extensive tri-al-and-error approach to defining appropriate soilproperties were time-consuming and had a high degree of

J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40 33
uncertainty that hindered efforts to develop procedures toextricate Spirit. The experiences gained in trying toextricate Spirit from Scamander Crater and the efforts toovercome the challenges of MER high wheel slip andsinkage conditions demonstrated the need for realisticsimulations of rover-terrain interactions. Rover/terrainsimulation capability would also provide engineers a toolto assess a rover’s expected mobility as part of the traverseplanning process, estimate soil properties, and examinescenarios to overcome mobility challenges caused by highslippage and sinkage conditions. To meet this need theARTEMIS (Adams-based Rover Terramechanics andMobility Interaction Simulator) was developed for theMER using classical wheel–soil interaction models fordeformable soils (Zhou et al., 2014).
The MER ARTEMIS includes the ability to traverserealistic terrain models that include digital elevations andpositionally dependent soil properties (Zhou et al., 2014).Wheel–soil interactions are modeled using classical ter-ramechanics equations that are based on pressure sinkagerelationships that lead to compaction resistance and pres-sure shear displacement relationships that lead to slip(Wong, 2001). Comparison of model and test data (singlewheel and rover-based data) showed reasonable confor-mance except at high sinkage and slip conditions.ARTEMIS is now used for both Opportunity and MarsScience Laboratory’s Curiosity rovers to model traversesacross terrains for path planning, for analysis of anomaliesencountered (e.g., was the high wheel actuator current dueto drive geometry or aging actuator for Opportunity), andfor retrieval of terrain properties (Arvidson et al., 2014b).ARTEMIS cannot be used to simulate complete embed-ding in deformable soils because of the limitations ofclassical terramechanics.
When deciding how to model soil and bedrock inter-actions with the MER wheels, ARTEMIS developersconsidered using finite element models, discrete elementmethod (DEM) models, classical terramechanics models(for soils), and Coulomb friction contact models forbedrock. The decision to use classical terramechanicsmodels and Coulomb friction for ARTEMIS was basedon the need to have a model that could run quicklyfor use in planning tactical traverse drives and one forwhich inertial forces could be ignored (Zhou et al.,2014). To improve the simulation accuracy of ARTEMISunder high slip/high sinkage mobility conditions it wasdecided to examine the possibility of using the resultsof a DEM model to simulate single-wheel MER mobi-lity. To this end, DEM simulations were done for aseries of single-wheel mobility tests conducted at theMassachusetts Institute of Technology’s RoboticMobility Group (MIT RMG) and compared with theMIT RMG test data. A previous use of the DEM tosimulate the MER wheels excavating trenches and forscuff tests demonstrated that this model has the potentialto accurately represent MER wheel performance (Knuthet al., 2012).
2. Classical terramechanics modeling of vehicle mobility and
its limitations
Classical terramechanics models of the mobility ofwheeled and tracked vehicles in off-road scenarios arebased on fundamental concepts of soil mechanics. Semi-empirical equations are used to predict different mobilityaspects, such as compaction resistance, traction, drawbarpull (DP), sinkage, and driving torque (Bekker, 1969;Wong and Reece, 1967a, 1967b). Common measures ofmobility are DP and sinkage of a wheel at defined wheelslip ratios. Defined as the net longitudinal force of a wheel,DP is calculated as the wheel thrust plus the sum of thetractive force from each wheel cleat minus the resistanceforce. Wheel sinkage is the depth that a rover wheel sinkswhile driving through soil. Sinkage can be the result ofcompaction and/or shear failure of the soil under the wheelor excavation of soil from wheel digging for wheel slipratios greater than 0.0. The wheel slip ratio (i), or wheelslip, is defined as
i ¼ 1� vrx
ðv < rx; drivingÞ ð1Þ
i ¼ rxv� 1 ðv > rx; breakingÞ ð2Þ
where v is the wheel’s forward velocity, x is the wheel’sangular velocity, and r is the wheel radius. Slip valuescan vary from �1 when the angular velocity is zero, to 1when the forward velocity is zero (Zhou et al., 2014).
The semi-empirical approach of ARTEMIS is able toachieve reasonable correlation with laboratory tests ofwheel mobility for wheel slip ratios of up to 0.6 through tri-al and error tuning of variables. For wheel slip ratios above0.6, it becomes increasingly difficult to replicate wheelmobility performance as defined by wheel sinkage andDP. Two possible reasons for this may be that the simpli-fied theoretical assumptions of wheel–soil interactions forclassical terramechanics models begin to break down athigh slip, or the soil properties at high slip are not well rep-resented by traditional bevameter measurements. Details ofthe terramechanics models used to develop ARTEMIS aredescribed in Zhou et al. (2014) and Iagnemma et al. (2011).
3. DEM simulations for high slip MER wheel mobility
A possible way to improve the ability of ARTEMIS tomodel high wheel slip mobility conditions, which are themost hazardous to MER mobility, is to use DEM simula-tions of rover wheel interactions with soil to construct alibrary of wheel performance parameters for the simulator.In this study, the COUPi (Controllable Objects UnboundParticles interaction) 3-D DEM model (Nye et al., 2014),using tri-sphere particles, was used to simulate sinkageand DP for a series of laboratory MER wheel mobility per-formance tests conducted for i = 0, 0.1, 0.3, and 0.5 todetermine the DEM best-fit parameters to represent themeasured data. The DEM model was then used to predict

34 J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40
DP and sinkage for the MER wheel at i = 0.7, 0.9, and0.99.
Previous studies of a MER wheel digging test and aMars in situ scuff test (i = 1) using a 3-D DEM demon-strated that quite reasonable agreement between test dataand DEM simulation results could be achieved (Knuthand Hopkins, 2011; Knuth et al., 2012). Simulation resultsfrom these studies (Knuth and Hopkins, 2011; Knuth et al.,2012) indicate that particle shape is extremely important inreplicating experimental data. Using spherical particles torepresent the granular media was not adequate to accurate-ly replicate wheel sinkage and torque. Improved agreementbetween simulation and experiment occurred when DEMsoil particle-shape complexity was increased by usingellipsoid and poly-ellipsoid particle shapes. The DEMsimulations of MER wheel scuff tests using poly-ellipsoidaland polyhedral particle shapes further improved agreementbetween simulation and experiment (Knuth and Hopkins,2011). Improved agreement between DEM simulationsand test data with increased particle shape complexityoccurs because the irregularly shaped DEM particlesinterlock with each other. Particle interlocking constrainsparticle rotation, interparticle contact sliding mechanisms,and the magnitude of bulk dilation that can produceincreased soil resistance and strain softening (Matsushimaand Chang, 2011), which replicates the way that soilsactually deform and fail.
4. MIT mobility laboratory experiments
The Robotic Mobility Group at MIT designed andfabricated a multipurpose terramechanics rig based onthe standard design described by Iagnemma et al. (2005).The test bed pictured in Fig. 1 is composed of a Lexan soilbin surrounded by an aluminum frame where all the
Fig. 1. MER wheel mobility test apparatus at the MIT mobilitylaboratory.
moving parts, actuators, and sensors are attached. A car-riage slides on two low-friction rails to allow longitudinaltranslation, while the wheel or track, attached to thecarriage, is able to rotate at a desired angular velocity.The wheel mount is also able to translate in the verticaldirection. This typical setup allows control of slip andvertical load by modifying the translational velocity ofthe carriage, angular velocity of the wheel, and applied load.
A 6-axis force torque ATI Omega 85 transducer ismounted between the wheel mount and the carriage tomeasure vertical load and traction generated by the wheel.Finally, a flange-to-flange reaction torque sensor fromFutek (TFF500) is used to measure driving torque appliedto the wheel. Control and measurement signals are handledby a NI PCIe-6363 card through Labview software. The rigis capable of approximately 1 m of horizontal displacementat a maximum velocity of approximately 120 mm/s with amaximal wheel angular velocity of approximately 0.7 rad/s.The bin width is 0.6 m, and the soil depth is 0.16 m.Considering the wheel sizes and vertical loads under study,these physical dimensions are sufficient for eliminatingboundary effects.
For the experiments described in this paper, MojaveMartian Simulant (MMS) was employed as a test medium(Beegle et al., 2007). This simulant is a mixture of finelycrushed and sorted granular basalt intended to mimic, bothat chemical and mechanical levels, the soil characteristics ofMars. The MMS particle-size distribution spans frommicrons to millimeters, with 80% of particles above the10 lm threshold. Soil strength properties were measuredfrom direct shear tests. Experimental test parameter dataare presented in Table 1 (Senatore and Iagnemma, 2011).
Tests were conducted with a MER spare flight alu-minum wheel of approximately 0.13 m radius and 0.16 mwidth with 5 mm cleat extensions. A section of the wheelcontains a reinforced recess that was used to hold theMER on a base platform during flight (tie-down patch).The MER wheel cleats and tie-down patch can be seen inFig. 1. A single test series was conducted with a verticalwheel load of 110 N for wheel slips of 0.0, 0.1, 0.3, 0.5,and 0.7. During the experiments, the angular velocity ofthe wheel was held constant (0.3 rad/s), while longitudinalvelocity was varied for each slip level, according to
Table 1Experimental test parameters.
Parameter Value
MER wheel test data
Diameter 0.13 mWidth 0.16 mNominal rotation rate 0.3 rad/sNormal load 110 NWheel slip 0, 0.1, 0.3, 0.5, 0.7
MMS property data
MMS nominal packing density 0.6MMS cohesion 600 PaMMS internal friction angle 35�

Table 2DEM MER wheel and particle test bed properties and test parameters.
Parameter Value
Wheel radius 0.13 mWheel angular velocity 1 rad/s, 2 rad/sWheel normal load 110 NWheel slip 0, 0.1, 0.3, 0.5, 0.7, 0.9Particle type Tri-sphereParticle number 392,049Particle density 2875 kg/m3
Test bed packing density 0.58, 0.60, 0.61, 0.62Particle shear modulus 0.05 GPaInterparticle friction coefficient 0.3, 0.4, 0.5, 0.6, 0.7, 0.8Internal friction angle 43�Apparent cohesion 8 kPaRadius for circumscribed sphere 0.0039 mParticle size distribution MonodispersedTest bed domain size (x, y, z) 0.4 m � 1.0 m � 0.5 m
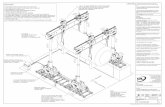
Fig. 2. Setup for the MER wheel simulation showing the seven DEMlayers that make up the test bed and a view of the tri-sphere particles (referto Table 2 for dimension and particle data).
J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40 35
Equation 1. Each MER wheel mobility test was run untilthe MER wheel attained a steady state in DP and sinkage,at which point the data were averaged over the interval ofmeasurement under steady-state conditions.
5. COUPi DEM simulations
5.1. DEM models and their constraints
Interest is increasing in the use of DEM models toimprove the physical representation of off-road vehiclemobility in conditions where classical terramechanics mod-els have difficulty (Li et al., 2012; Lichtenheldt and Schafer,2013; Nakashima et al., 2010; Smith and Peng, 2013; Smithet al., 2014; Wang et al., 2011). These studies have demon-strated that even 2-D DEM simulations with relatively sim-ple particle geometries can provide useful qualitativerepresentations of off-road vehicle mobility. The studiesalso indicate that the ability to develop quantitativeDEM representations of off-road vehicle mobility improvesin direct proportion to the degree that micro-scale proper-ties and processes known to be important to the mechani-cal behavior of soils are included in DEM simulations.Micro-scale properties and processes that affect soilmechanical behavior include interparticle contact frictionand cohesion, particle interlocking, packing density (PD),particle crushing, particle size and shape distribution, andparticle rearrangement (Cheshomi et al., 2009; Cho et al.,2006; Das, 2007; Shinohara et al., 2000; Zelasko et al.,1975). Particle shape is one of the major contributing fac-tors to the mechanical behavior of granular media alongwith particle PD (Das, 2007). Classical soil mechanics dealswith macro-scale soil parameters such as internal friction,cohesion, bulk density, compaction, and other soil proper-ty descriptors that lump micro-scale properties andprocesses together. The DEM attempts to simulatemicro-scale properties and processes in a way that themacro-scale behaviors emerge from simulations.
Due to computational requirements and modeling com-plexity, many DEM models include few of the differentmicro-scale properties known to affect soil mechanicalbehavior. Examples include utilizing spherical particles forcomputational efficiency (Smith et al., 2014), adjusting par-ticle density to achieve a reasonable bulk density but notPD, using uniform particle-size distributions, and using2-D models to simulate 3-D processes. A comprehensiveexamination of how closely a DEM model needs to replicatethe micro-scale features of a target granular aggregate hasyet to be done. COUPi DEM simulation models have simi-lar constraints, although we continue to add capability,needed to adequately model the behavior of granularaggregates (Nye et al., 2014). In this study, we extendedthe parameter space for COUPi simulations of the MMSused in the MER wheel performance test to includeinterparticle friction, PD, and particle shape (Table 2).Mono-dispersed tri-sphere particles with a circumscribedsphere radius of about 4 mm were used to allow increased
particle interlocking compared to spherical particles. Theuse of polyhedral particles would further increase particleinterlocking, but are not yet fully implemented withinCOUPi.
5.2. COUPi MER wheel simulations
COUPi DEM simulations of the MIT MER wheel per-formance tests were done by first importing a CAD repre-sentation of the MER wheel into COUPi (using a modulethat allows any CAD 3-D object to be imported in STEPor STL format into a model). The wheel was then placedon a bed of uniform-sized tri-sphere particles withconstant, specified PD as a function of depth (Fig. 2).The uniform PD was created at specific values (Table 2)by separately settling seven layers of randomly orientedtri-sphere particles into a rectangular box using high inter-particle friction to create an initially low PD. Starting fromthe bottom layer, each layer’s interparticle friction wasreduced to a value that allowed further particle settlementto the desired PD (Fig. 3). Once all layers settled to the tar-get PD, the interparticle friction factor was set to equal thevalue used in the various DEM simulation runs.
The MIT test conditions were replicated in the DEMsimulations by applying control functions to the wheel to

Fig. 3. Tri-sphere PD as a function of the interparticle friction coefficientused to create DEM test beds with specified uniform PD.
Fig. 4. Comparison of DEM simulation DP and sinkage for wheelrotation rates of 1 rad/s and 2 rad/s.
36 J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40
set its rotation rate and longitudinal motion. The wheel’snormal load for both tests and simulations was 110 N(Tables 1 and 2). Constant slip tests were performed bydriving the wheel’s rotation at a constant speed while inde-pendently driving the longitudinal (y-axis) motion of thewheel. Most DEM simulations of the MER wheel used a2 rad/s rotation rate to reduce computation time; for theMIT tests, the wheel rotation rate was 0.3 rad/s. A singleDEM simulation, done at a wheel rotation rate of 1 rad/s, was compared with an identical simulation done at arotation rate of 2 rad/s to ensure that inertia effects didnot affect the model results (Fig. 4).
6. Results and discussion
6.1. COUPi simulations of MIT MER wheel drawbar pull
and sinkage tests
High wheel slip conditions are of most concern in MERtactical traverse planning, and classical terramechanics
models have difficulty accurately representing rover wheelmobility in such conditions. To examine the mobility per-formance of a MER wheel under conditions of high slip,DEM simulations were done in two stages. In the firststage, DEM particle test bed parameters (PD and interpar-ticle friction) were varied in simulations of the MIT testdata for i = 0, 0.1, 0.3, and 0.5 to determine the parameterset that produced the best agreement between test data andsimulations. The initial parameter values for DEM particlePD and friction factor were selected based on the proper-ties of PD and friction angle of the MMS (Table 1) usedin the MIT tests. From these initial values, a range of PDand friction factor values was used to find the best agree-ment between COUPi simulated results and MITexperimental results (Fig. 5).
The second stage of analysis used DEM particle para-meters from the best fit of DEM simulations to MIT testdata for i = 0 through 0.5 to predict MER wheel DP andsinkage at i = 0.7, 0.9, and 0.99 (Fig. 6). The MIT datapoint at i = 0.7 was not used in determining DEM best-fit parameters.
For both wheel DP and sinkage, agreement betweenDEM simulations and MIT test data improves withincreasing DEM particle bed strength, achieving a best fitfor PD of 0.62 and an interparticle friction coefficient ofl ¼ 0:8 (Fig. 5). Large differences in DP between MIT testsand DEM simulations occur for wheel slips of 0 (�275%),0.1 (�57%), and 0.3 (�16%) that decrease with increasingwheel slip. Differences between measured and simulatedDP for i = 0.5 and 0.7 are quite small at 2.2% and 6.1%,respectively. Differences between simulated and measuredMER wheel sinkage are less than 25% except for i = 0.3,which exceeds 50%.
The poor agreement between simulated and measuredDP at low slip is likely due to the variable shear stress profileas a function of deformation that occurs with granularmaterials (Fig. 7). The stress ratio for JSC 1-A lunar simu-lant as a function of strain measured using a geotechnicaltri-axial strength test cell (Arsian et al., 2010) is comparedin Fig. 7 with the stress ratio of the best-fit DEM particlebed used in this study. The DEM particle bed stress ratioversus strain curves were obtained by simulating a geotech-nical tri-axial strength test cell following the procedure ofUthus et al. (2008) and Knuth et al. (2012). Data fromJSC 1-A are being used in this discussion, as we are unawareof any available stress ratio versus strain data for MMS. Theconcepts discussed from Fig. 7, however, apply to all soils.
Low wheel slip mobility engages soil deformation beforeor near the soil’s peak shear strength; this is evidenced bythe increase in DP with wheel slip until i = 0.3. The DPremains relatively constant from i = 0.3 to 0.5 and thenincreases slightly from i = 0.5 to 0.7 (Fig. 6). The increasein DP for low wheel slip occurs as the soil stress increaseswith strain until reaching the soil’s peak stress. A constantor slightly increasing DP at higher wheel slip results fromthe wheel engaging the soil’s residual strength as soil under-goes large strain (Figs. 6 and 7).

Fig. 5. Average DP (a) and sinkage (b) as a function of wheel slip for MIT tests and DEM simulation results with different particle PDs and interparticlefriction coefficients.
Fig. 6. Drawbar pull (a) and sinkage (b) as a function of wheel slip for MER wheel mobility MIT test data and DEM simulations.
Fig. 7. Measured shear stress ratio – axial strain for JSC 1-A and forDEM simulated tri-sphere particles.
J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40 37
The accuracy of a DEM simulation of MER wheelmobility in soil depends on how similar the DEM particlebed shear stress ratio–strain curve is to that of the soil. Therise in the soil shear stress ratio to its peak value is a resultof interparticle contact friction and soil dilation that con-tinues expanding until interlocked particles start slidingpast each other at a reduced shear stress. The degree thatparticles interlock, which depends on soil particle angu-larity and shape and bulk soil density, determines howrapidly the stress ratio will rise as a function of strain to
its peak (Roscoe et al., 1958). To compensate for the lackof angularity in DEM particles, the model’s interparticlecontact friction is increased to achieve the required peakshear strength. This increase can result in a difference indeformation strain at peak shear strength between theDEM particle bed and the soil (see Fig. 7) and can adverse-ly affect the accuracy of DEM simulations of low wheel slipmobility compared with test data.
High wheel slip mobility engages residual soil strength,which evolves to a relatively constant value with increasingstrain as the primary source of resistance. A DEM particlebed also evolves to a relatively constant residual strengthfor large strain, high wheel slip mobility. When DEM par-ticle bed residual strength is similar to that of the test soil,the accuracy of DEM simulations of MER wheel mobilitytest data should improve, as is observed in the currentanalysis.
The DEM model predicts that MER wheel DP andsinkage will increase significantly for i = 0.9 and 0.99,compared with results for MER wheel slip values of lessthan 0.5 (Fig. 6). Increased sinkage magnitudes are likelydue to the high rate of excavation from MER wheelcleats, resulting from the low forward velocity of theMER wheel compared with its rotation rate (Fig. 8, 0.9slip ratio). Sinkage for all MIT tests and for DEMsimulations up to i = 0.9 of MER wheel mobility reachedsteady state. At i = 0.99, DEM simulations indicate that

Fig. 8. Particle contact forces in the DEM soil and sinkage for the MER wheel as a function of slip.
38 J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40
sinkage depth continues increasing, since the forwardprogression of the MER wheel into the undisturbed par-ticle bed is too slow to compensate for the rate of excava-tion by the wheel.
The large increase in DP predicted for the MER wheelwith i P 0.9 occurs as the wheel surface contact area withthe DEM particle bed increases dramatically as sinkageincreases.
7. Conclusions
COUPi 3-D DEM simulations of MIT MER wheelmobility tests accurately represented MIT test data forwheel DP and sinkage for wheel slips of 0.5 and 0.7. Agree-ment between DEM simulations of MIT wheel mobilitytest data for wheel slips of 0, 0.1, and 0.3 improved asDEM particle bed PD and interparticle friction wereincreased to produce a stronger DEM particle bed. Theremaining differences between DEM simulations andMIT test data for MER DP and sinkage for wheel slipsof 0. 0.1 and 0.3 are attributed to the tri-sphere particlesof the DEM particle bed, which cannot produce the strongparticle interlocking of the angular MMS particles. As aresult, at low slip (i.e., low soil shear strain/displacement),the shear stress for MMS rises more rapidly as a function
of shear displacement/strain than it does for the DEM par-ticle bed, until reaching the MMS peak shear stress. At lowwheel slip, this rapid rise in soil sheer stress with strain pro-duces a higher magnitude DP in the MIT tests comparedwith the DEM simulations.
For shear strain/displacements that are exceeded at peakshear strength (wheel slip P0.3), both the MMS and DEMparticle bed shear strength decreases to a residual valuewhere it is controlled by interparticle friction rather thanparticle interlocking. This includes wheel slip values of0.5 and 0.7, where DEM simulations and MIT test dataare in reasonable agreement for DP and sinkage. TheDEM simulation of wheel slips of 0.9 and 0.99, where nodata exist, produced significantly higher DP and sinkagethan seen at i = 0.5 and 0.7 for DEM simulations. Wehypothesize that the higher values of wheel sinkage arecaused by excessive excavation of particles that occursbecause of the low forward velocity of the wheel fori = 0.9 and 0.99. As wheel sinkage increases in high wheelslip conditions, the area of contact between the wheel sur-face and soil increases in proportion, producing larger DPthan would occur in lower wheel slip conditions, whichproduce much smaller values of sinkage.
Three-dimensional DEM simulations are required torepresent MER wheel mobility in order to capture in a

J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40 39
realistic way the influence of cambered wheel and tie-downpatch geometries on mobility. The DEM simulation accu-racy of low-slip MER wheel mobility performance can beimproved by using a DEM particle bed made of angularpolyhedral particles with a broader range of particle sizesthan was used in the current study (Knuth et al., 2012;Knuth and Hopkins, 2011). The larger range of particlesizes allows for the creation of DEM particle beds withPD that is more representative of soils.
The relatively good agreement between DEM simula-tions of MER wheel mobility test results at wheel slips of0.5 and 0.7 and the ability to predice DP and sinkage atwheel slips of 0.9 and 0.99 indicates that DEM simulationsof MER wheel mobility can improve ARTEMIS capa-bilities to simulate tactical MER traverses.
Acknowledgments
This work was supported by NASA awardNNX09AF54A “Physical and Geologic Investigations ofthe Surface Materials along the MER Traverses: Continua-tion of Co-I support to the Mars Exploration Rovers Par-ticipating Scientist Program” and the Institute of NorthernEngineering, University of Alaska Fairbanks.
References
Arsian, H., Batiste, S., Sture, S., 2010. Engineering properties of Lunarsoil simulant JSC-1A. ASCE J. Aeros. Eng. 23 (1), 70–83. <http://dx.doi.org/10.1061/(ASCE)0893-1321(2010)23:1(70)>.
Arvidson, R.E., Bell III, J.F., Bellutta, P., Cabrol, N.A., Catalano, J.G.,Cohen, J., et al, 2010. Spirit Mars Rover Mission: Overview andselected results from the Northern Home Plate Winter Haven to theside of Scamander Crater. J Geophys Res 115 (E00F03), 19. <http://dx.doi.org/10.1029/2010JE003633>.
Arvidson, R.E., Ashley, J.W., Bell III, J.F., Chojnacki, M., Cohen, J.,Economou, T.E., et al, 2011. Opportunity Mars Rover Mission:overview and selected result from purgatory ripple to traverses toendeavour crater. J Geophys Res 116 (E00F15), 33. <http://dx.doi.org/10.1029/2010JE003746>.
Arvidson, R.E., Squyres, S.W., Bell III, J.F., Catalano, J.G., Clark, B.C.,Crumpler, L.S., et al, 2014a. Ancient aqueous environments atendeavour crater. Mars. Sci. 343 (6169), 8. <http://dx.doi.org/10.1126/science.1248097>.
Arvidson, R.E., Belutta, P., Calef, F., Fraeman, A.A., Garvin, J.,Gasnault, O., et al, 2014b. Terrain physical properties derived fromorbital data and the first 360 sols of mars science laboratory curiosityrover observations in gale crater. J. Geophys. Res.: Planets 119 (6),1322–1344.
Beegle, L.W., Peters, G.H., Mungas, G.S., Bearman, G.H., Smith, J.A.,Anderson, R.C., 2007. Mojave Martian simulant: A new Martian soilsimulant, in: 38th Lunar and Planetary Science Conference (Lunar andPlanetary Science XXXVIII), held March 12–16, 2007, League City,Texas. LPI Contribution No. 1338, p. 2005. <http://www.lpi.usra.edu/meetings/lpsc2007/pdf/2005.pdf>.
Bekker, M.G., 1969. Introduction to Terrain-Vehicle Systems. TheUniversity of Michigan Press, Ann Arbor.
Cheshomi, A., Fakher, A., Jones, C.J.F.P., 2009. A correlation betweenfriction angle and particle shape metrics in Quaternary coarse alluvia.Quart. J. Eng. Geol. Hydrogeol. 42, 145–155. <http://dx.doi.org/10.1144/1470-9236/07-052>.
Cho, G., Dodds, J., Santamarina, J., 2006. Particle shape effects onpacking density, stiffness, and strength: natural and crushed sands.
ASCE J. Geotech. Geoenviron. Eng. 132 (5), 591–602. <http://dx.doi.org/10.1061/(ASCE)1090-0241(2006)132:5(591)>.
Das, N., 2007. Modeling three-dimensional shape of sand grains usingdiscrete element method. Ph.D., University of South Florida. <http://scholarcommons.usf.edu/etd/689>.
Grotzinger, J.P., Arvidson, E., Bell III, J.F., Calvin, W., Clark, B.C., Fike,D.A., et al, 2005. Stratigraphy and sedimentology of a dry to weteolian depositional system, Burns Formation, Meridiani Planum,Mars. Earth Planet Sci. Lett. 240 (1), 11–72. <http://dx.doi.org/10.1016/j.epsl.2005.09.039>.
Iagnemma, K., Shibly, H., Dubowsky, S., 2005. A laboratory single wheeltestbed for studying planetary rover wheel–terrain interaction.MIT Field and Space Robotics Laboratory Technical Report 1.p. 05–05.
Iagnemma, K., Senatore, C., Trease, B., Arvidson, R., Shaw, A., Zhou, F.,et al., 2011. Terramechanics modeling of Mars surface explorationrovers for simulation and parameter estimation. In: Paper presented atthe ASME Design Engineering Technical Conference, Washington,DC, p. 8.
Knuth, M.A., Hopkins, M.A., 2011. A comparison of scuff testsfrom the Martian rover, Opportunity, and a discrete elementmethod model. 17th International Conference of the Interna-tional Society for Terrain Vehicle Systems (ISTVS), Blacksburg, VA,p. 8.
Knuth, M.A., Johnson, J.B., Hopkins, M.A., Sullivan, R.J., Moore, J.M.,2012. Discrete element modeling of a Mars Exploration Rover wheel ingranular material. J. Terramech. 49 (1), 27–36. <http://dx.doi.org/10.1016/j.jterra.2011.09.003>.
Li, C., Ding, Y., Gravish, N., Maladen, R.D., Masse, A., Umbanhowar,P.B., et al, 2012. Towards a terramechanics for bio-inspired locomo-tion in granular environments. Earth Space 264–273. http://dx.doi.org/10.1061/9780784412190.031.
Lichtenheldt, R., Schafer, B., 2013. Planetary rover locomotion on soft
granular soils – efficient adaption of the rolling behavior of non-
spherical grains for discrete element simulations. In: Bischoff, M.,
Onate, E., Owen, D.R.J., Ramm, E., Wriggers, P. (Eds.), PARTICLES
2013: III International Conference on Particle-based Methods –
Fundamentals and Applications. p. 12.Maimone, M., Cheng, Y., Matthies, L., 2007. Two years of visual
odometry on the Mars Exploration Rovers. J. Field Robot. 24 (3),169–186. <http://dx.doi.org/10.1002/rob.20184>.
Matsushima, T., Chang, C.S., 2011. Quantitative evaluation of the effectof irregularly shaped particles in sheared granular assemblies.Granular Matter 13, 269–276. http://dx.doi.org/10.1007/s10035-011-0263-6.
Nakashima, H., Fujii, H., Oida, A., Momozu, M., Kanamori, H., Aoki,S., et al, 2010. Discrete element method analysis of single wheelperformance for a small lunar rover on sloped terrain. J. Terramech.47, 307–321. http://dx.doi.org/10.1016/j.jterra.2010.04.001.
Nye, B., Kulchitsky, A.V., Johnson, J.B., 2014. Intersecting dilated convexpolyhedra method for modeling complex particles in discrete elementmethod. Int. J. Numer. Anal. Method Geomech. 38 (9), 978–990.<http://dx.doi.org/10.1002/nag.2299>.
Roscoe, K.H., Schofield, A.N., Wroth, C.P., 1958. On the yielding of soils.Geotechnique 8, 22–53.
Senatore, C., Iagnemma, K., 2011. Direct shear behavior of dry, granularsoils subject to low normal stresses. In: Proceedings of 17th Interna-tional Conference of the ISTVS. Blacksburg, VA.
Shinohara, K., Oida, M., Golman, B., 2000. Effect of particle shape onangle of internal friction by triaxial compression test. Powder Technol.107, 131–136.
Smith, W., Peng, H., 2013. Modeling of wheel–soil interaction over roughterrain using the discrete element method. J. Terramech. 50, 277–287.http://dx.doi.org/10.1016/j.jterra.2013.09.002.
Smith, W., Melanz, D., Senatore, C., Iagnemma, K., Peng, H., 2014.Comparison of discrete element method and traditional modelingmethods for steady-state wheel–terrain interaction of small vehicles. J.Terramech. 56, 61–75.

40 J.B. Johnson et al. / Journal of Terramechanics 62 (2015) 31–40
Squyres, S.W., Arvidson, R.E., Bell III, J.F., Bruckner, J., Cabrol, N.A.,Calvin, W., et al, 2004a. The Spirit rover’s Athena science investigationat Gusev Crater, Mars. Science 305 (5685), 794–799. <http://dx.doi.org/10.1126/science.1100194>.
Squyres, S.W., Arvidson, R.E., Bell III, J.F., Bruckner, J., Cabrol, N.A.,Calvin, W., et al, 2004b. The Opportunity rover’s Athena scienceinvestigation at Meridiani Planum, Mars. Science 306 (5702), 1698–1703. <http://dx.doi.org/10.1126/science.1106171>.
Squyres, S.W., Arvidson, R.E., Ruff, S., Gellert, R., Morris, R.V., Ming,D.W., et al, 2008. Detection of silica-rich deposits on Mars. Science320, 1063–1067.
Sullivan, R.J., Anderson, R., Biesiadecki, J., Bond, T., Stewart, H., 2011.Cohesions, friction angles, and other physical properties of Martianregolith from Mars Exploration Rover wheel trenches and wheel scuffs.J Geophys Res 116 (E2), 1991–2012. <http://dx.doi.org/10.1029/2010JE003625>.
Uthus, L., Hopkins, M.A., Horvli, I., 2008. Discrete element modelling ofthe resilient behaviour of unbound granular aggregates. Int. J.Pavement Eng. 9 (6), 387–395.
Wang, J., Yu, H.S., Langston, P., Fraige, F., 2011. Particle shape effectsin discrete element modelling of cohesive angular particles.Granular Matter 13 (1), 1–12. http://dx.doi.org/10.1007/s10035-010-0217-4.
Wong, J.Y., 2001. Theory of Ground Vehicles, third ed. John Wiley &Sons, NY, ISBN 0-471-35461-9.
Wong, J.Y., Reece, A.R., 1967a. Prediction of rigid wheel performancebased on analysis of soil-wheel stresses, Part I. Performance of drivenrigid wheels. J. Terramech. 4 (1), 81–98. http://dx.doi.org/10.1016/j.jterra.2014.08.004.
Wong, J.Y., Reece, A.R., 1967b. Prediction of rigid wheel performancebased on analysis of soil-wheel stresses, Part. II, Performance of towedrigid wheels. J. Terramech. 4 (2), 7–25.
Zelasko, J.S., Krizek, R.J., Edil, T.B., 1975. Shear behavior of sands as afunction of grain characteristics. Istanbul Conference on Soil Mech.Found. Eng. 1, 55–64.
Zhou, F., Arvidson, R.E., Bennett, K., Trease, B., Lindemann, R.,Bellutta, P., et al, 2014. Simulations of Mars rover traverses. J. FieldRobotics 31, 141–160. <http://dx.doi.org/10.1002/rob.21483>.


















