A Comparison of Methods for Sight-Reading Development Utilizing ...

1
Direct Position Estimation UtilizingNon-Line-of-Sight (NLOS) GPS Signals
Yuting Ng and Grace Xingxin GaoUniversity of Illinois at Urbana-Champaign
BIOGRAPHIES
Yuting Ng is a graduate student in the AerospaceEngineering Department at the University of Illinois atUrbana-Champaign. She received her B.S. degree in electricalengineering, graduating with university honors, from thesame university. Her research interests are in advanced signaltracking, navigation, control, robotics, RADAR and UAVs.
Grace Xingxin Gao received her B.S. degree in mechanicalengineering and her M.S. degree in electrical engineeringfrom Tsinghua University, Beijing, China in 2001 and 2003.She received her PhD degree in electrical engineering fromStanford University in 2008. From 2008 to 2012, she wasa research associate at Stanford University. Since 2012, shehas been an assistant professor in the Aerospace EngineeringDepartment at University of Illinois at Urbana-Champaign.Her research interests are systems, signals, control, androbotics. She is a senior member of IEEE and a member ofION.
Abstract—We propose Direct Position Estimation (DPE) utiliz-ing non-line-of-sight (NLOS) GPS signals for urban navigation.In urban environments, buildings reflect GPS signals, leading toreception of NLOS GPS signals. In addition, buildings obstructGPS signals, resulting in reduced GPS signal availability.
We treat NLOS GPS signals as additional line-of-sight (LOS)GPS signals to virtual satellites at mirror-image positions. Wecalculate these satellite mirror-image positions and velocitiesusing knowledge of building reflection surfaces estimated fromavailable three-dimensional (3D) maps. We then create expectedsignal receptions to include NLOS GPS signal information atmultiple potential navigation candidates. Following that, we useDirect Position Estimation (DPE) to obtain the Maximum Likeli-hood Estimate (MLE) navigation solution. The MLE navigationsolution is the navigation candidate with the expected signalreception that produced the highest overall correlation againstthe actual received signal.
We implemented DPE utilizing NLOS GPS signals on oursoftware platform - PyGNSS. We conducted experiments in frontof the 53 m by 40 m wind tunnel located at NASA Ames ResearchCenter in Mountain View, California. The surface of the windtunnel’s air intake valve is a dense metal mesh of grid size1.8 cm, a reflector of GPS signals. We demonstrated through ourexperiment, an improvement in horizontal positioning accuracyby 40 m in comparison to conventional GPS positioning usingscalar tracking.
Yuting Ng and Grace Xingxin Gao are with the Department of AerospaceEngineering, University of Illinois at Urbana-Champaign, Urbana, IL 61801,USA. E-mails: [email protected], [email protected].
I. INTRODUCTION
Building obstruction and reflection present serious challengesto GPS receivers operating in urban environments. In urbanenvironments, buildings may obstruct GPS signals, leading toreduced GPS signal availability. In addition, buildings mayreflect GPS signals, resulting in reception of non-line-of-sight (NLOS) GPS signals. NLOS GPS signals are delayedversions of the line-of-sight (LOS) GPS signals. As such, theylead to pseudorange errors, resulting in positioning errors [1].Conventional approaches treat NLOS GPS signals as unwantedinterferences to be rejected and/or mitigated.
Conventional approaches reject NLOS GPS signals at mul-tiple stages of GPS signal processing. Antenna-based ap-proaches include the use of right hand circular polarized(RHCP) antennas and controlled radiation pattern antennas(CRPA) [2], [3]. Correlator-based approaches include theuse of narrow correlator, double-delta correlator, multipathestimating DLL (MEDLL) and vision correlator [4]–[7]. Inaddition, receiver autonomous integrity monitoring (RAIM)approaches reject pseudoranges with inconsistent positioningresiduals [8].
In addition to rejecting NLOS GPS signals, conventionalapproaches also make use of robust filtering and joint signaltracking techniques to mitigate the effects of NLOS GPSsignals. Robust filtering techniques include the use of Bayesianfilters such as Kalman filters and particle filters [9], [10]. Jointsignal tracking techniques include vector tracking [11] anddirect position estimation (DPE) [12], [13]. An overview ofexisting approaches addressing NLOS GPS signals is providedin Table I.
TABLE IEXISTING APPROACHES ADDRESSING NLOS GPS SIGNALS
Reject Mitigate
● Antenna﹘ RHCP [2]﹘ CRPA [3]● Correlator﹘ Narrow [4]﹘ Double-delta [5] ﹘ MEDLL [6]﹘ Vision correlator [7]● RAIM [8]
● Bayes filtering ﹘ Kalman filter [9]﹘ Particle filter [10]● Joint signal tracking﹘ Vector tracking [11]﹘ Direct Position Estimation (DPE)
[12, 13]

2
In contrast to conventional approaches that reject or mitigatethe effects of NLOS GPS signals, we propose transformingNLOS GPS signals from being unwanted interferences tobecoming additional useful navigation signals. In addition,we provide a navigation solution under reduced GPS signalavailability. We do so via DPE utilizing NLOS GPS signals.
The rest of the paper is organized as follows. Section IIprovides an overview of related work. Section III describesour approach. Section IV discusses our implementation andpresents our experiment results. We demonstrated throughour experiment, an improvement in horizontal positioningaccuracy by 40m. This is in comparison to conventional GPSpositioning using scalar tracking and trilateration. Finally,Section V summarizes the paper.
II. RELATED WORK
This section provides an overview of related work on DPEand three-dimensional (3D) map aided positioning techniques.
A. Direct Position Estimation (DPE)
DPE is an unconventional joint signal tracking and nav-igation technique that directly estimates the GPS receiver’snavigation parameters from the GPS raw signal [14]–[23]. Itdoes so by directly comparing the expected signal receptionof multiple potential navigation candidates against the actualreceived signal. The navigation solution is then estimated asthe navigation candidate with the highest overall correlationbetween the expected and the actual received signal. Thisoverall correlation is an accumulation of signal correlationsacross all available satellites, with replica signal parametersaligned to the candidate navigation parameters [14], [16]. Inthis manner, DPE jointly uses signal correlations from allavailable satellites to produce a robust navigation solution.NLOS signal correlations will be inconsistent with LOS signalcorrelations and thus mitigated.
B. 3D Map Aided Positioning Techniques
State-of-the-art approaches use available 3D maps to predictNLOS signal reception. Apart from rejecting and/or miti-gating the effects of NLOS pseudoranges [24]–[27], state-of-the-art approaches leverage upon the benefits of NLOSpseudoranges, constructively using the affected pseudorangemeasurements through special treatment of NLOS paths duringtrilateration [28], [29]. Using 3D building models, they modelNLOS paths as LOS paths from satellites to virtual receiverslocated at receiver mirror-image positions [28]–[30]. However,these approaches are limited by issues associated with trackingmultipath signals.
The first issue is reduced signal availability due to multipathfading in addition to building obstruction. Under reducedsignal availability, the navigation solution obtained via trilater-ation is degraded. With further reduction in signal availability,i.e. number of available pseudorange measurements reducedto less than 4, conventional calculation of the GPS navigationsolution via trilateration with 4 unknowns is not possible.
The second issue is the varying effects multipath signalshave on the signal correlation, associated with constructive and
destructive interfences. Consequently, NLOS signal receptiondo not always result in the expected additional pseudorangedelays [1]. As such, the range biases caused by NLOS signalreception are not easily mitigated at the pseudorange level.
In contrast to state-of-the-art approaches addressing NLOSsignal reception at the GPS pseudorange measurement level,we directly address and constructively use NLOS signals atthe GPS signal level via DPE utilizing NLOS signals.
III. OUR APPROACH: DPE UTILIZING NLOS SIGNALS
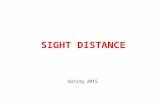
We first model NLOS signals as LOS signals to virtualsatellites at satellite mirror-image positions, as shown in Fig. 1.This is similar to using virtual transmitters for multipath-assisted wireless indoor positioning [31].
Line-of-sight (LOS)
GPS antenna
Non-line-of-sight (NLOS)
Buildingreflection
(a)
GPS antenna
Virtual satellite(mirror-image position)
NLOS signalbecomes LOS signal to virtual satellite
Line-of-sight (LOS)
(b)
Fig. 1. NLOS signal transformed from being (a) an unwanted interferenceto becoming (b) an additional LOS signal to a virtual satellite at the satellitemirror-image position.
We calculate these satellite mirror-image positions andvelocities using knowledge of building reflection surfacesestimated from available 3D maps. The equations for obtainingthe satellite mirror-image position and velocity are as follows:
pi = pi − 2nT (pi − ps)n (1)˙pi = pi − 2nT (pi − ps)n (2)
where pi and ˙pi are the mirror-image position and velocityof the ith satellite, pi and pi are the position and velocity of theith satellite. In addition, the surface normal and a point on thesurface are represented by n and ps respectively. All positionsand velocities are in the Earth-Centered-Inertial (ECI) coordi-nates as the reflection model assumes light traveling in straight

3
lines; light travel in straight lines only in inertial referenceframes.
We then integrate these NLOS signals into GPS positioningvia DPE. We modify the expected signal reception used inDPE to include NLOS signal information, as shown in Fig. 2.Our approach deeply integrates NLOS signal information andaccurately describes the actual received signal. In addition, ourapproach provides a navigation solution under reduced signalavailability.
Position residual
NorthPosition residual East
Overall correlation
Navigationestimate
Satellite mirror-image
(a)
Fig. 2. Overall correlation in DPE, with the NLOS signal treated as anadditional LOS signal to a virtual satellite at the satellite mirror-imageposition.
A block diagram of our approach is given in Fig. 3.
Initialize receiver candidates
Calculate satellite PVTs
Calculate satellite mirror-imagesBuilding reflection surface
Determine possible LOS & NLOS paths
Generate LOS & NLOS signal replicas
Batch correlation using FFT
Non-coherent accumulation
Estimate PVT from overall correlation
Fig. 3. Block diagram of DPE utilizing NLOS signals.
IV. IMPLEMENTATION AND EXPERIMENT RESULTS
We implemented DPE utilizing NLOS signals with com-mercial frontend components and our software platform -PyGNSS. We used a signal sampling rate of 5.0 MHz, 14-bit complex sampling and 50 dB RF gain.
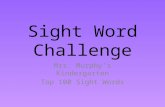
We conducted an experiment in front of the 53 m by 40 mwind tunnel [32] located at NASA’s Ames Research Center,Mountain View, CA, as shown in Fig. 4. The material of thewind tunnel’s air intake valve’s vertical surface is a metal wiremesh with a grid spacing of 1.8 cm by 1.8 cm, as shownin Fig. 5. This grid spacing is approximately one tenth thecarrier wavelength of the GPS L1 signal, the wire radius ofthe mesh is much less than the grid spacing. Thus, the vertical
surface of the air intake valve acts as a reflector of GPS L1signals.
(a) (b)
Fig. 4. Experiment setup in front of 53 m by 40 m wind tunnel locatedat NASA’s Ames Research Center, Mountain View, CA. (a) data collectionequipment; (b) wide angle photograph of the wind tunnel’s air intake valve.
(a) (b)
Fig. 5. Metal wire mesh on the wind tunnel’s air intake valve’s verticalsurface. (a) close up photograph showing grid spacing of 1.8 cm by 1.8 cm;(b) photograph from another perspective showing wire mesh covering entirevertical surface of air intake valve.
We estimated the normal vector and a point on the windtunnel’s reflection surface using a geo-referenced 3D pointcloud available online through the NOAA Data Access Viewer(DAV) tool [33], [34]. A screenshot of the NOAA DAV inter-face is shown in Fig. 6. We refined the estimate using IterativeClosest Point (ICP) map-matching with a Lidar scan [35], asshown in Fig. 7.
We then determined possible LOS and NLOS paths fromsatellite elevation-azimuth plots. Plotted in Fig. 8 are thesatellite positions, the satellite mirror-image positions and thebuilding reflection surface. A NLOS path to a satellite existsif the corresponding LOS path to the satellite mirror-imageintersects the building reflection surface. In our experiment,LOS paths exist to satellite PRNs 5, 7, 27, 28 and a NLOSpath exist to satellite PRN 5. Thus, both LOS and NLOSsignals from satellite PRN 5 are present. This is verified byexamining the amplitude of the in-phase prompt correlationsover time, obtained via scalar tracking. Only the in-phaseprompt correlations of satellite PRN 5 exhibit a sinusoidalbehavior characteristic of having both LOS and NLOS signals,as shown in Fig. 9.

4
Fig. 6. Screenshot of NOAA Data Access Viewer (DAV) tool.
Missing building reflection surface
3D map from NOAA DAV
not geo-referencedRefined building reflection surface
Lidar scan
Fig. 7. Building reflection surface estimated from NOAA point cloud, refinedusing map-matching with a Lidar scan.
We then performed DPE, including the signal correlationcontribution from the NLOS path to satellite PRN 5, wherethe NLOS path is represented as a LOS path to the satellitemirror-image.
Fig. 8. Elevation-azimuth plot with satellites highlighted using green boxesand satellite mirror-images highlighted using red boxes. The 3D point cloudof the wind tunnel’s air intake valve is plotted using grey dots. The path tothe mirror-image of satellite PRN 5 passes through the surface of the windtunnel. Thus, a NLOS path to satellite PRN 5 exists. In addition, LOS pathsexist to satellite PRNs 5, 7, 27, 28.
(a) (b)
(c) (d)
Fig. 9. Only the in-phase prompt correlation of satellite PRN 5 exhibit asinusoidal behaviour characteristic of having both LOS and NLOS signals.
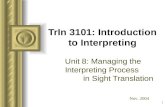
The overall correlation result, including the signal corre-lation from the NLOS path to satellite PRN 5, is shownin Fig. 10. The color of the position markers, plotted onGoogle Maps [36], represent the overall correlation amplitude.Red indicates a high overall correlation amplitude and blueindicates a low overall correlation amplitude. The navigationsolution is directly estimated as a correlation-weighted meanof the navigation candidates. The result, as compared to thatestimated using pseudoranges from scalar tracking followedby trilateration, is shown in Fig. 11. DPE utilizing NLOSGPS signals demonstrated improved horizontal positioningaccuracy by 40 m.
Fig. 10. Normalized overall correlation with contribution from all satellites,including the satellite mirror-image of PRN 5.

5
Our approach DPE utilizing NLOS signals
Conventional approachScalar tracking + Trilateration
Position of GPS receiver
estimated result
estimated result
Position of GPS receiver
5 m 45 m
Fig. 11. DPE utilizing NLOS GPS signals demonstrate improved horizontalpositioning accuracy by 40 m. This is in comparison to the navigation resultobtained using pseudoranges estimated from conventional scalar trackingfollowed by trilateration.
V. CONCLUSION
In summary, we proposed DPE utilizing NLOS signals tomitigate the issues of NLOS GPS signal reception and reducedGPS signal availability in urban navigation. We modeledNLOS signals as LOS signals to virtual satellites at satellitemirror-image positions. In this manner, NLOS signals aretransformed from being unwanted interferences to becomingadditional useful navigation signals. We then created expectedsignal receptions to include NLOS GPS signal information atmultiple potential navigation candidates and use DPE for po-sitioning. Finally, we experimentally demonstrated a reductionin horizontal positioning error by 40 m. This is in comparisonto the navigation result obtained using pseudoranges estimatedfrom conventional scalar tracking followed by trilateration.
ACKNOWLEDGMENTS
The authors would like to thank the Safe Autonomous FlightEnvironment (SAFE50) and the Unmanned Aircraft System(UAS) Traffic Management (UTM) teams at NASA’s AmesResearch Center, where the lead author was hosted for summer2016, for their equipment support. The author would also liketo thank Akshay Shetty for collecting and map-matching theLidar scan to the geo-referenced 3D point cloud.
REFERENCES
[1] P. D. Groves, “GNSS solutions: Multipath vs. NLOS signals. how doesNon-Line-of-Sight reception differ from multipath interference,” InsideGNSS Magazine, vol. 8, no. 6, pp. 40–42, 2013.
[2] Z. Jiang and P. D. Groves, “NLOS GPS signal detection using a dual-polarisation antenna,” GPS solutions, vol. 18, no. 1, pp. 15–26, 2014.
[3] A. Brown and N. Gerein, “Test results of a digital beamformingGPS receiver in a jamming environment,” in Proceedings of the 14thInternational Technical Meeting of the Satellite Division of The Instituteof Navigation (ION GPS 2001), Salt Lake City, UT. ION, 2001, pp.894–903.
[4] A. J. Van Dierendonck, P. Fenton, and T. Ford, “Theory and performanceof narrow correlator spacing in a GPS receiver,” NAVIGATION, Journalof The Institute of Navigation, vol. 39, no. 3, pp. 265–284, 1992.
[5] L. Garin, F. van Diggelen, and J.-M. Rousseau, “Strobe and edgecorrelator multipath mitigation for code,” in Proceedings of the 9thInternational Technical Meeting of the Satellite Division of The Instituteof Navigation (ION GPS 1996), Kansas City, MO, 1996, pp. 657–664.
[6] R. D. Van Nee and J. Siereveld, “The multipath estimating delay lockloop: approaching theoretical accuracy limits,” in Proceedings of the 6thInternational Technical Meeting of the Satellite Division of The Instituteof Navigation (ION GPS 1993), Salt Lake City, UT. ION, 1993, pp.921–921.
[7] P. C. Fenton and J. Jones, “The theory and performance of NovAtel inc.svision correlator,” in Proceedings of the 18th International TechnicalMeeting of the Satellite Division of The Institute of Navigation (IONGNSS 2005), Long Beach, CA. ION, 2005, pp. 2178–2186.
[8] B. W. Parkinson and P. Axelrad, “Autonomous GPS integrity monitoringusing the pseudorange residual,” Navigation, Journal of The Institute ofNavigation, vol. 35, no. 2, pp. 255–274, 1988.
[9] J. Liu, X. Cui, M. Lu, and Z. Feng, “Vector tracking loops in GNSSreceivers for dynamic weak signals,” Journal of Systems Engineeringand Electronics, vol. 24, no. 3, pp. 349–364, 2013.
[10] M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet, “Dynamicmultipath estimation by sequential monte carlo methods,” Proceedingsof the 20th International Technical Meeting of the Satellite Divisionof The Institute of Navigation (ION GNSS 2007), Fort Worth, TX, pp.1712–1721, 2007.
[11] J. J. Spilker Jr, “Vector delay lock loop processing of radiolocationtransmitter signals,” Mar. 14 1995, US Patent 5,398,034.
[12] P. Closas, C. Fernandez-Prades, and J. Fernandez-Rubio, “On themaximum likelihood estimation of position,” in Proceedings of the 19thInternational Technical Meeting of the Satellite Division of The Instituteof Navigation (ION GNSS 2006), Fort Worth, TX, 2006, pp. 1800–1810.
[13] P. Axelrad, J. Donna, and M. Mitchell, “Enhancing GNSS acquisition bycombining signals from multiple channels and satellites,” in Proceedingsof the 22nd International Technical Meeting of The Satellite Division ofthe Institute of Navigation (ION GNSS 2009), Savannah, GA, 2009, pp.2617–2628.
[14] P. Closas, C. Fernandez-Prades, and J. Fernandez-Rubio, “Maximumlikelihood estimation of position in GNSS,” IEEE Signal ProcessingLetters, vol. 14, no. 5, pp. 359–362, 2007.
[15] P. Closas, C. Fernandez-Prades, J. Fernandez-Rubio et al., “Evaluationof GNSS direct position estimation in realistic multipath channels,” inProceedings of the 28th International Technical Meeting of The SatelliteDivision of the Institute of Navigation (ION GNSS+ 2015), Tampa,Florida, 2015, pp. 3693–3701.
[16] P. Axelrad, B. K. Bradley, J. Donna, M. Mitchell, and S. Mohiuddin,“Collective detection and direct positioning using multiple GNSS satel-lites,” NAVIGATION, Journal of The Institute of Navigation, vol. 58,no. 4, pp. 305–321, 2011.
[17] R. DiEsposti, “GPS PRN code signal processing and receiver designfor simultaneous all-in-view coherent signal acquisition and navigationsolution determination,” in Proceedings of the 2007 National TechnicalMeeting of The Institute of Navigation, San Diego, CA, 2007, pp. 91–103.
[18] L. R. Weill, “A high performance code and carrier tracking architecturefor ground-based mobile GNSS receivers,” in Proceedings of the 23rdInternational Technical Meeting of The Satellite Division of the Instituteof Navigation (ION GNSS 2010), Portland, OR, 2010, pp. 3054–3068.
[19] J. W. Cheong, J. Wu, A. G. Dempster, and C. Rizos, “Efficient imple-mentation of collective detection,” in International Global NavigationSatellite Systems Society (IGNSS Symposium 2011), 2011, pp. 15–17.
[20] T. Lin, J. T. Curran, C. ODriscoll, and G. Lachapelle, “Implementationof a navigation domain GNSS signal tracking loop,” in Proceedings ofthe 24th International Technical Meeting of The Satellite Division ofthe Institute of Navigation (ION GNSS 2011), Portland, OR, 2011, pp.3644–3651.
[21] J. Liu, X. Cui, M. Lu, and Z. Feng, “Direct position tracking loopbased on linearised signal model for global navigation satellite systemreceivers,” IET Radar, Sonar & Navigation, vol. 7, no. 7, pp. 789–799,2013.
[22] Y. Ng and G. X. Gao, “Mitigating jamming and meaconing attacks usingdirect GPS positioning,” in Proceedings of IEEE/ION PLANS 2016,Savannah, GA. IEEE/ION, 2016, pp. 1021–1026.
[23] Y. Ng, A. H.-P. Chu, and G. X. Gao, “Efficient GPS direct positionestimation,” IEEE Transactions on Aerospace and Electronic Systems,Submitted.
[24] B. Ben-Moshe, E. Elkin, H. Levi, and A. Weissman, “Improving accu-racy of GNSS devices in urban canyons,” in 23rd Canadian Conferenceon Computational Geometry (CCCG 2011), Toronto ON, August 1012,2011, 2011.
[25] M. Obst, S. Bauer, P. Reisdorf, and G. Wanielik, “Multipath detectionwith 3D digital maps for robust multi-constellation GNSS/INS vehicle

6
localization in urban areas,” in Intelligent Vehicles Symposium (IV), 2012IEEE. IEEE, 2012, pp. 184–190.
[26] M. Obst, S. Bauer, and G. Wanielik, “Urban multipath detection and mit-igation with dynamic 3D maps for reliable land vehicle localization,” inProceedings of IEEE/ION PLANS 2012, Myrtle Beach, South Carolina.IEEE, 2012, pp. 685–691.
[27] T. Iwase, N. Suzuki, and Y. Watanabe, “Estimation and exclusion ofmultipath range error for robust positioning,” GPS solutions, vol. 17,no. 1, pp. 53–62, 2013.
[28] A. Bourdeau, M. Sahmoudi, and J. Tourneret, “Tight integration ofGNSS and a 3D city model for robust positioning in urban canyons,” inProceedings of the 25th International Technical Meeting of The SatelliteDivision of the Institute of Navigation (ION GNSS+ 2012), Nashville,TN. The Institute of Navigation, 2012.
[29] S. Miura, S. Hisaka, and S. Kamijo, “GPS multipath detection andrectification using 3D maps,” in 16th International IEEE Conferenceon Intelligent Transportation Systems (ITSC 2013). IEEE, 2013, pp.1528–1534.
[30] L.-T. Hsu, Y. Gu, and S. Kamijo, “NLOS correction/exclusion for GNSSmeasurement using RAIM and city building models,” Sensors, vol. 15,no. 7, pp. 17 329–17 349, 2015.
[31] C. Gentner, B. Ma, M. Ulmschneider, T. Jost, and A. Dammann,“Simultaneous localization and mapping in multipath environments,” inProceedings of IEEE/ION PLANS 2016, Savannah, GA. IEEE, 2016,pp. 807–815.
[32] National Aeronautics and Space Administration (NASA). (1992, may)NASA’s wind tunnels. [Online]. Available: http://www.nasa.gov/centers/langley/news/factsheets/WindTunnel.html
[33] National Oceanic and Atmospheric Administration (NOAA) Office forCoastal Management. (2016, apr) Data access viewer (dav). [Online].Available: https://coast.noaa.gov/dataviewer/#/lidar/
[34] K. Waters. (2016, apr) Digital coast data changes. [Online].Available: https://geozoneblog.wordpress.com/2016/04/21/digital-coast-data-changes/
[35] J. Wilm. (2010, may) Iterative closest point. [Online]. Avail-able: https://www.mathworks.com/matlabcentral/fileexchange/27804-iterative-closest-point
[36] Google Developers. (2016, jan) Google Maps Javascript API.[Online]. Available: https://developers.google.com/maps/documentation/javascript/