
DIN .,J ·lf ANALELE UNIVERSIT Ă TII DIN ORADEA
6
' , · l · . · . } • • ·' 1 1 J . , , · l f 'J -� -:: �!- :� � - MINISTERUL ÎNVĂTĂMÎNTULUI ' UNIVERSITATE DIN ORADEA '-� ANALELE UNIVERSIT Ă TII DIN ORADEA ' VOL. 11 FASCICOLA ELECTROTEHNICĂ SI ENERGETICĂ. ' 1992 ; · __ j ·-: '
Transcript of DIN .,J ·lf ANALELE UNIVERSIT Ă TII DIN ORADEA
' ,·l·.·.} • • ·' 1 1 J . ,, ·lf
'J .. -� -::�!-:���-
:r
MINISTERUL ÎNVĂTĂMÎNTULUI '
UNIVERSITATE/-\ DIN ORADEA '-�
ANALELE UNIVERSIT Ă TII DIN ORADEA '
VOL. 11
FASCICOLA ELECTROTEHNICĂ SI ENERGETICĂ. '
1992
; ·
__ j
·-: '

�--------.................................... .... _______________________ ·�·_J-----------------
-232-
q
io ;id d
i, iia
ll1
a. Fig.l
iio
b.
Ct2& s l1 R 1 Xr a Xm a 2x2-aXm � �
a.
Ilo ta Xm ha t
- 1 x' R'
l1 R
u,�-l ���; 1 . - X� � b.
Fig.2
�
. i0-o .!,='!' o·Mid
d'
'
-233-COMPORTA�EA DXNAMXCA A UNUI
MOTOR DE TXP SAWVER
COMANDAT fN BUCLA iNCHXSA
� � , I.A. VIOREL L. SZABO z. KOVACS
Universitat�a Tehnic� Cluj-Napoca
Abstract: The variable reluctance, Sawyer type motor, by it simplicity and control facilities, is one of the best choices in. linear positioni�� systems. Based an a coupled circuit-field mathematical motor model, a compu t er program was developed, and the closed loop operating mode was studied.
1. INTRODUCERE
Motorul pas cu pas liniar, sincron reactiv Vfriabil� şi magnet perman�nt, de tip Sa�yer, figura 1., are o constructle simplA: o pa�te
cu reluctant.!l reprezentat -tn mobilA, nwmit.!l
inductor şi o parte f ix ă, numită indus sau stator, separate de tntrefierul maşinii. Parteă mobilă este a l cAtui t A din dow.!l armături magnetice, separate de un m�gnet perman�nt. Bobinele de comandA slnt dispuse pe cele dou-:1 arm::lturi magnetice, formind fiecare ctte un electromagnet cu doi poli aparenti. Pe suprafata acestor doi poli stnt execwtati dinti şi crestAturi avtnd acelaşi pas dentar ca şi dintii de pe partea fixA a motorulwi. Magnetul
permanent aşezat intre cei doi elect�omagneti asigwră un flux care se !nchide prin electromagneti şi prin partea fixl a motorului. Magnetul permanent, la acest motor, joac.li un rol dublu: asigurA cimpul magnetic de excitatie ln motor şi supar�, prin reluctanta sa foarte mare, cei doi electromagneti pe care sint pre��zute bobinele de �omandl.
= · Figura 1.

-234-Acest motor pre: int� avantaj ul unei simplit�ti construct i ve
asociat cu o valoare mare a fortei pe unitatea de volum, raport
ce depinde de p�rformantele magnetului permanent. Este tn fapt
motorul cu cele mai largi posibilitlti dintre toate tipur i l e de motoare pas cu pas cu mişc are liniarA, fiind cel mai utilizat
pentru mişcarea incremental� de translatie. Cu un astfel de motor se pot realiza pozitionAri foarte
precise cu a cceleratii �� vitez e mari, aplici nd metoda
micropaşirii, adiel alimentarea simultanl a celor doul bobine de
comand�, obtin!ndu-se pozitii de echilibru intermediare tntre dou� poz itii de echilibru stabil. Daci se impune ca di stantele tntre aceste pozitii intermediare (micropaşii) s� fie egale, se pot g l s i valorile curentilor din cele doul bobine de ccmandl pentru fiecare pozitie Intermediari. Curentul dintr-o bobinl de comandl va avea o variatie cosinusoidall, iar celllalt variatie sinusoi dall .
. .
2. MODELUL MATEMATIC AL MOTORULUI
Problema esentiall tn alcAtuirea modelului motorului li ni ar sincron de tip. Sawyer constl tn determinarea variatiei punc t ului de functionare de pe caracterist i ca de demagnetizare a magnetu l ui permanent , CIJ. Pentru acesta modelul adoptat trebuie si contin� un bloc de calcul al ci mpu lui magnetic In motor tn functie de valorile curentilor prin bobinele de comandl şi de po z itia relativl a plrt il mobile fat' de cea fixl. Considerind �ensi unile de alimentare a bobinelor dE comandl ca mlrimi de intrare , deci cunoscute, modelul contine un bloc de cal cul al curent ilor , fiind asiguratA o reactie de la f lux urile calculate in blocul de calcul al c t mpului la blocul de calcul al curenti l�r prin reactual iz area , la f i ecare pas de timp, a inductivitltiilor bobinelor de comandl. Cunosc ind, ca mărimi de ieşire a blocului de calcul al c imp ului , fluxurile sub poli, se calculeaz� for tele tangentiale şi no rmale . Prin r�zolvarea ecuatie ! de echi l i bru a f ortelor se determinl spatiul· parcurs şi eventual viteza şi �cce l eratia la fiecare pas de timp. La deplasarea p�rtii mobile fatA de cea fixl se modifici configuratia din 1ntrefier, schimbtndu-se pozitia relati�l a dintllor şi crestlturilor pe cele dou� armlturi. In consecintA, la fiecare pas de timp se modifici re l uctantele sub poli tn functie de noua pozitie, rez ultind o configuratie modif i cat i pentru calculul cimpului 1n motor. Evident , submodele l e f iind neliniare , 1n toa te blocurile de calcul , paşii de timp se iau suficient de mici şi se asigur3, prin procedur i l e de cal cul , convergenta solutiei. Structura modelului, cu blocurile core�punzltoare es t e dati tn fi qura 2.
i 1
1 1 1 { ! 1 1
1 1 1 1
1
i 1 1
i . . •
-235-În figuri s-a notat : [ u J - matricea tensiunilor de comandl, ( i J - matricea curen t ilor din bobinele de comandl,
- matricea flunurilor din diferite 5ectiuni ale
motorului ( magn?t, bobine ,S tntrefier ) , matricea fortelor- .dezvoltate,
�
mat rice� inducti�itltilor bob i nelor de comandl, F ] -L ] 1-
deplasarea i nducto rului fatl de indus,
matricea relucta�telor magnetice ale tntre fierulul :·: ! R ) -
de sub polii induc torului:
u ··r co 1cu la rea --. cul·entului
R
Calculao·ea � Calcula�ea fluxului forţei
'-----..j Hodifican!a inductan � ei
Figura 2.
F Calcularea deplasăr"ii
)( L
Yn fapt, modelul propus este o reuniune de trei submodele,
adiel: submodelul de �ircuit,
ii ) - submodelul de �tmp, iii ) - scobmodelul d€· 7oişcare.
Intre aceste submodele e;te asi gura tl o circulatie normal� a
valori l or calccolate şi sin':. prevlzc•te două blocuri d.c tip
"reactie", car e permit cons•derarea reali a neliniaritltil
mie:u l ul prin modi f icarea ind�ctivitltilor, r espectiv modificarea
configuratie� tntr efierului !• _deplasarea· relativ� a armlturilor.
Evident submodelul de calcul �1 ci mpul u i este ceL mai de:volt�t, de altfel el se const ituie tn pivotul Intregului model�
Pentru c �l c u lul cîmpului 'n structura m otorului pas cu p�s
liniar s-a considerat calculul analitic prin re: olvarea ecuatiilor de f luxuri scrise pe un cir c ui t magnetic reluctantele magnetice fii�d clt mai r�guros
echivalent,
determinate·.
C ir cuit ul ma g ne tic al mot or� l ui pas cu pas liniar cu mag ne t permane nt şi reluctantl vari•bil� s -a divizat 1n 9 p ort i uni cu reluctivitate mag net ică constantA, tinSnd cont de configur� t ia
mie:ului motorului ca şi_
de circ u l atia f l uxurilor. Configuratia circuitului magne tic şi fluxu� il e considerate sint date tn figura
. , 3.
••• J1 î.' l_:.i
!:�! 1, .
: r : ! � \: i ( �--:; � �� 1 :�-�� H i tlf !\l· t. �i !f;'
l. l j; fi. �c l:i J; l r ?' l f: 1!: Il ; �:
, ·U.:

' ·i 11 :t
-236-?i9=21T 1 � lO:?iiTM ?i ll=�u2
�------ ->--- -- - "t --- ---7- - ---"t-- --- -r------i 1 1 1 1 1 1 1 1 1 1 1 1
1 �7 1 --------ţ------...... --
l· o :
�11• �21 y .. y 1 1
1
8 1 LD--�-----3, ______ :
'R 1
Hl �3l : : ...... 1 IRM
, _____________ ....._ _____ 7 _____ ....._ _____________ 1 �5
Figura 3.
Reluctantele magnetice s-au calculat pe port iun i le de
sectiune şi reluctivitate con5t antl cu relatia generală:
R = ( 1 ) V S
Reluctanta intrefierului sub cei patru poli ai motorului s-a
exprimat prin definirea unui tntrefier variabil functie de pozitia celor doul armlturi. Pentr u rez olvare a ci rcu i tului
magnetic echivalent s-a util i= at metoda fluxurilor independente, sistemul liniar de ecuatii fiind scris matricial sub f orma :
CAJ • C<il = tel ( 2 )
unde CAl e ste matricea r el uc t antel or , [�] matricea fluuurilor prin l aturile solenatiilor.
c i rc uitului ech iva t'ent şi teJ matr i cea
Modelul matematic elaborat pentr u motorul sincron liniar de ti p Sawyer permi te evidentierea tuturor efectelor specifice, cum
ar fi modificarea punctului de functionare pe caracteristica de demagnetizarea a m agnetului permanent, varia tia reluctantelor magnetice pentru diferite portiuni de circuit magnetic, variatia
fortelor tangentiale şi norm� l e , acceleratia, viteza şi spati ul parcurs de partea mobill a mo tor u l ui etc. Acest model, structurat
Intr-un mod diferit de cel obişnuit pen tru studiul functionArii
maş i nilor electrice, perm i te , pr in programul elaborat, calculul
caracteri sticilJr dinamic.
motorului functionind In regim stati onar şi
�--' 1 i 1 .1
{ i
.l 1 1 1 ) 1
1
)V t:" 1" ..
3. SISTEMUL DE COMANDA -237-
Comanda motorului sincron liniar de tip Saw�er tn buclă deschisa
foarte
utili z at prezintA
dator-iti
este simplA, ne fiind neces�re circ uit e electronice
comp l e x e . Din acea st l cauzl acest mod de comandl este
!n aplicatii nepr etenti oase din cauzA c� acest motor •, 1
vibratii ( ascila tii ale i�ductorului) �n functionare modificăr-ii · valorilor fbr-telcr normale sub polii
armlturil mobile. De asemenea , din cau z a sistemului de alimentare preconizat, microplşirea, inductorul ·nu este poziţionat tn
pozitia de echilibru a r-e l u c ta ntelor tntrefierului sub pie sele polare şi tn con secintă apar mici ?Sci l atii ptnl la a tingerea unei poz it ii corespunzătoare. In sf�rşit , armltur-a fi�l fii nd tn fapt o grindl rezemată la ca�ete, vibrat i i l e inductorului, ca· şi
deplasarea greutltli acest�ia, pot fi preluate şi amplifi cate ptnA la rez on an t A: Din acest• cauze comanda tn bucll deschisl nu
este folosit� tn acele ap lic �t i i la care motorul es te utilizat la capacitAtile sale max ime.
Pentru a obtine vite:e de deplasar-e ma�ime, timpi de pozitionare minime , acceler-�tii, respectiv deceleratii ctt mai mar-i, motorul trebuie comandat tn bucll jnchisA. E�istenta buclei de reactie garanteazA executarea corect� a �ozitionlrilor impuse,
firi pierderi de paşi. Pentru realizar-ea comen�ii 1n buci�
tnc hisl a motorului se propune folosirea sistemului de comand• ·tn
t i mp real pr-ezentat 1n figur� 4., t2J.
Driverinteligent
V
Figura 4.
Acceleratia inst anta nee este detec t at l de un accelerometru
piezoelectric montat pe par�e� mobi l A a maşinii, furnizind un sem n al electric proport iona l :u acc elera t L a motor-ului mAsur-ati pe
directia de dep l asare . Acest &emnal de acceleratle este integrat
pentr-u a produce reactia de v�te:l unita ti i de comand�. Sistemul de control emit? c omanda pentru micropasul
numai In cazul In care motorui a rAspuns satisflcltor la
pre cedentA. In acest mod mot�rul nu are posibilitate sA
Llrm�itor
comanda
pi�rda paşi. Sistemul de canto! inte:igent treb ui e si determine valoarea optimi a curentilor- din =ale· dou� bobine de comanda ale
mot orului, De�lasarea motoru l ui este controlata !n timp, l u! nd tn . .
--------'-----------================·-· � ,·· --·-=-·-_· -· ---
TII T< jl � .
� ··� 0 t i j � �� d-: Jl� r1f
��· �· �;
ql � u
1 � J
1.; ' i ;

1, 1 !1
-235-considerare cele trei inter�a!e de bază ale mişcării : primul, intervalul de accelerare , tn care motorul se dep l aseazA cu
acceleratia msximl. Al doile• interval corespunde d eplasării cu viteza constant6 maximă. In ai trelea interval partea mobill are
deceleratia maximă.
V
7t tace tclec
Figura 5.
Accel erarea , respectiv decelerarea
trebuie controlată riguros tn �edErea
minimiz,rii timpului necesar exe�ut�rii pozition��t-ii impuse. In practică este foarte des folosit prof ilul de viteză de tip rampl,
prez ent ,;,: in figura 5., (3J. Vit eza m;.,:im.l\ este deturminat.l\ de necesitAtile sistemului de paz i�ion are. Acceleratia maximJ,. amax'
rezultă din f orta tangentială maxima, Fmax• dez volta ti de motorul liniar:
amax = Fma:< 1 m 3
ln care m este masa totală a plrtii mobile şi a sarc:inii purtate. Comanda �n betel.� t nci1J să a mo toru !ui pas cu pas liniar
permite o operare stabilă la viteze de depl asare mari. In
aplicatiile de po z it i onare deceleratia trebuie initiati· cu un anumit timp !nainte de atingerea pozitiei dorite . Timpu l neces ar
acc;elerării,
relatia:
tace:• respecti,. dece! erări i, tdec, este dată de
tace tde c: Yma>: 1 •ma:·: ( 4 )
4. REZULTATE SI CONCLUZII
Motorul sincron liniar 1n cazul tn care nu se impun perf ormante ridic ite poate fi c omandat 1n buc lă deschisă. Modul
de comand ă in buc lă deschisă poate afecta a�plitudinea, faza 5au frecventa curentilor de alimentare.
In acest articol stnt pre:entate comparativ modurile de comandă 1n buclă deschisă şi în buclă lnchisă. In cazul comen:ii tn buclă deschisă curen ti i sînt s i nusoidali, respectiv
cosinusoidali, de amp lit udin e şi frecventA constant.\\� In cazul .
comenzii ln buclă. Inchisi curenti! sint sinusoidali-cosinusoidali, de amplitudi:"le variabilă, dar de frecventă constantă.
Motorul liniar sincron cu magneti permanenti are pe partea mobilă 4 poli, pe fiecare pol fi1nd � dinti . Pasul dentar este de
0,002 m, iar l�timea dinteiu! de 0,001 m. Structura plrtii fixe este identică. Magnetul permanent, de tip�!
145 are induc: tia remanentă d� 0,9 T şi intensitatea
dentară a VACO�Ii'oXclmpului -�
coercitiv de 650 kA/m. -239-
Pentru exe mplificare s-a impus o deplasare de 0,005 m cu o
vitezA de 0,1 m/s. Accelera�>a max imA era de 10 m/s/s, re:u ltt n d
t imp ul de accelerare, respe ct1v deceţprarE de 0,01 s. M o t oru l a•
va dep lasa cu viteza constan�l un tim� de 0,04 s.
In figura 6. stnt prezentate variatiile tn timp pentru
curentul i nt r -o bobină de COCio.ndă, forta tangential.'\ rezcll t.jr.tJ., dep lasarea şi vite�a fn ca::Ltl comen::ii :in b1..tclă deschis�. S� pot
observa variatiile mari a!e . vitezei plr ti i mob i le da tor ate
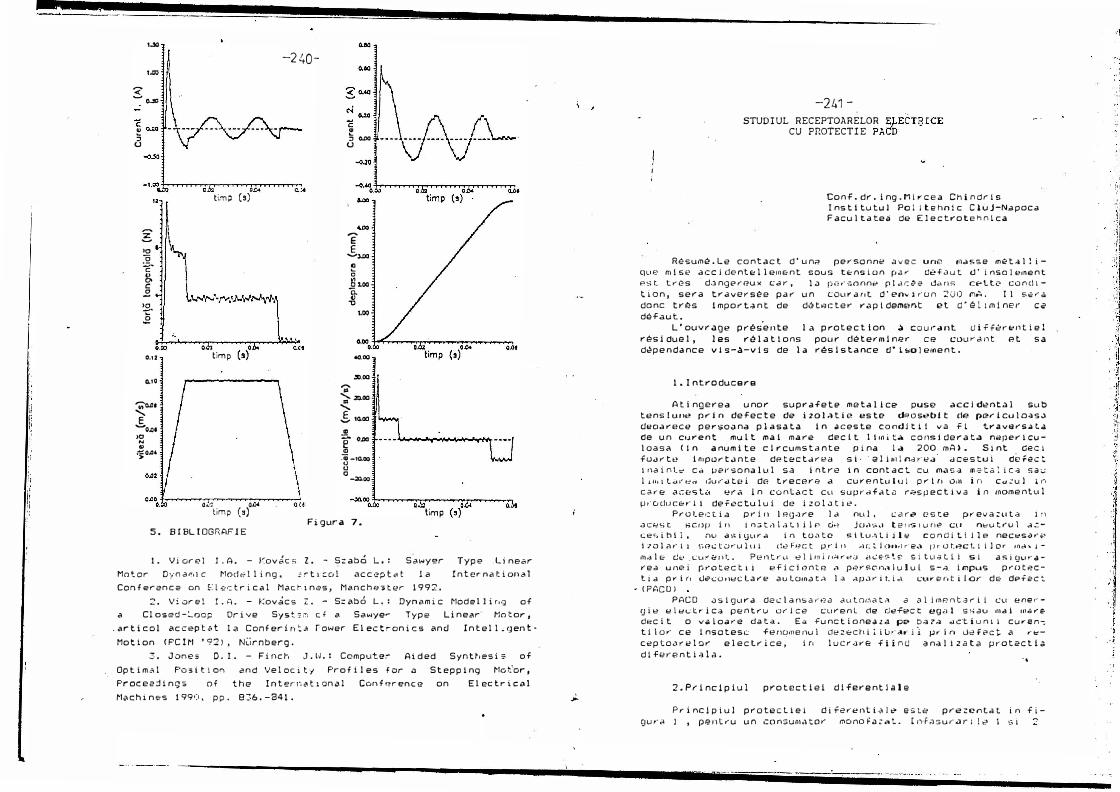
modificării fortei tangenţJ,,le. In f i gura 7. s� nt preze>ntate
variatii le in timp ale c:urantului tntr-o bobină de comandA, ale
fortei t angenti ale rezultanta, ale deplasării, ale vitez ei şi ale
accelerat iei 11otorul este
plrtii mobile In cazul comenzii tn buc:l� !nchis.:l.
acc:elerât d� o fortA tangential� mare, ap ro ape
constanti tn timpul deplasării CLt vite=ă constanti, iar în timpul
mici. Fo � m � vitezei
de viteză impus. decelerlrii are valori f oarle
este apr oap e identic� cu profilul acest caz este perfect liniară.
de dep l.;.:: "re
Deplasari?e', 1:"1
...
..
'<" ""'"" N
�� :J u
....,
�"" O.aJ c . .J• ....
0.00
�<.DO E .§. lAO
� l.QO o "' E t.DO o. " � o.::a
"'"
/•
().1!.0
Figura 6.
;� i �--.. --- .. "' c
i� J.�� Q.G1 a.&i a.&i o:o; a.� a.ce
._,., limp (s} _ .
0..11
� E �
c N " 1:
�
. ,
�---�
1-'0
1..110
< �(UD
c: u :; u
··a g IO � c g. c: ..8 � ..
a.bi o tirn p (s)
� ·h '·, o .;;;
o.n _ timp
G-10
U�uD• ' E
-o.c• 10 N .. 5 0A4
��) Q.�o.� o
timp (�) 5. BIBLIOGRAFIE
-240-
c.:o
'"'
c .. :;o..oo u
�
�
.... 'E E ..__.lJXI � c �2.00 a. " "O
1.00
40.00
:noa -;-' lD.OO .. ' ,§,1a.oa ..
� OAO � :ii -10.00 o g -lC.OO
-noo01. _ a -x; timp
Figura 7.
1. Viorel I.A. - Voviks Z. - Szabo L.: Sawyer Typ e .Linear Motor Dyna�ic Modelling, �rt•�ol acceptat la International Conference on Ele�trical Mac�inss, Manche3ter 1992.
2. Vior-el !.A. - f<ovâcs ;:. - Szabci L. : Dynamic �\odelliroq of
a Closed-�oop Or-ive Syst•� cf a Sawyer Type Linear Motor, .articol acceptat la Conferinta rower Electronics and Intell,gent
Motion IPCIM '92l, N�rnberg.
3. Jone;; D.I. - Finch J.I·J.l Compc1te:- Aided Synthesis of
Optimal Position and Velocity Pro f i les for a Stepping Mo�or,
ProceedinGs of the Internataonal Confer-ence on Electrica!
Machines !990, pp. 836. -841. ;..
-241-STUOIUL RECEPTOARELOR E�ECT8[CE
CU PROTECTIE PAC'D
Conf.dr.ing.Mi�cea Chindris Institutul Politehnic CiuJ-N.apoca
F acul tatea de Electrotehnica
Resume.Le contact d'unr? p·e,...sonne avec un8 flldsse met�l l i que mise accidentedlement sous tension p.;,.- dO:.faut o· insoleonent est tY�S · d�nge�eux c�r, la fJer·�onn� pl���e dar1s c�lt� contlltion, sef'a t r" ave r- s ee par' un C.:OL•rar•t d'en'-'ir·un �00 tnH. Il s�,...Q dane t��s lmpo�t�nt de d�tBcter rapldement et d'�ltm!ner c� defaut .
L'ouv�.:�ge pres-ente l a p..-otectlon .l cou1'<1nt t.Jiff.e,.-r,ontie!
..-esiduel, les �elat!ons pou� det er mine r ce cQur"ant At sa d�pendance vis-.l-vis de la resistanc:e d"L�oleonent.
1. 1 ntroducere
Atinge�ea unor suprafete m etal i ce puse accidental sub tensiune prin defecte de izol.'lt.ie es te dF?oseblt ele p<?rlculo;�s,, deoa�ece pe�şoana plasata In �ceste condJtli v.;, fL �raversdta de un curent mult mai mana d"cit ltonit_. considerat..l nepericuloasa (in anumite circumstante pina la 200 mA>. Sint deci fucJr-tl:} in•poYt.Jnte detectdr"ea si· · al i••Jlndr't2d. dcestui d�f.ec� 1r1ainl� c� �lei'SOnalul sa intYe in contact cu masa met�lic� sa� lio•tldl't-:d rJI.Jr·cltei de tYeC81""8 el CUr"P.ntul\JJ pP""lrl 01l\ in CuO:ul l,.(l ca�e acesta er-a in contact CLl supr·dfdt� r�spectiva in tnomentul
pt·ocluc8r·ii de f ectu lui de izolati�. Pr'ote�:ti.a pl"in lP.'J .. ll""e }d nLil. t.:art? aste P�"·eva:ut� 1n
ac8st 1-iC'.L)f.l in tn:;t..-1\rl.Li ilP ci.,.! jo .. ,·.:;.,.J te11".'ilUrlt? cu n�utt'ul ... 1 .. -.-ce'";.ibii., nl.l dSi(jllr'd in toZ\tO stlu-::\tillr:? conditiile nec:�;�S.c)r·�:� i"?Oli\r'll �;P.�tur·ului l�t?-Ş.:ţ�r:t p_r·ln ... \ct.lo•���,.·e,\ prut�ct.iilDr ill�,.l-m.:\le c.!�·.cu!'�nt. Pentr-u elimilt�r-�.:J <:h..:E·S'..� situ<3tii si osigl.ar·.a.-r"ea unei pl"otecti i eficit�nte '"' p8r'sc.n .. ll1..1lul s-a. impu.s p,.-otec:-tid pr'ir, (.h?.:.;O•H:�cla.r"'e auLomatrl la Ap ... 11"'it.id cu,.-er.tilo,... de dPfac�
• (pţ,CU) PACD �sigLt�a. declansa�ea dutn�at� a alimRnta�ii CLt ene�-
gi8 �l�ct�·ic� pentr'u or'ice CLtl""en l de de�ect egal sHau •ndi ��a,.-� decit o valoal""e data. Ea �unctioneaza p� ba7a actiunli cu,..en� tilor· ce insotesc.: �en�.nenul de:!echiLilJr·..t.,..-jl J.Jr'in Liefect. a r'l:'ceptoa�elar elect�ice, in lucr••e fiinU an�112at.;, pr otect ia diferenti�la. . ,
2.Princlpiul p �otectiei dlfe�entlale
Principiul prote c tie i difsrential� esle prezentat in fi-t;,lur·� 1 , p�ntru un •:onsun,cltOr" monoi=a:c"tlt .. [n·Filsu, ... .ar i 1 � 1 �;i
<'
. i � . : ,· -� �t�
: ţ ·f. �
. ��� .:,1\ Jif ;l · ��� ��!�r�
�; � } ! J r · �: ·t 1' 1 t � � { �: �: �� �-� -� ' -
!' .,;
'\1


















