
Digital Signal Processing- -...
103
Digital Signal Processing- Basic Concepts Some materials from Dr. Larry Marple are acknowledged
Transcript of Digital Signal Processing- -...

Digital Signal Processing-Basic Concepts
Some materials from Dr. Larry Marple are acknowledged

Outline
Background materialsContinuous-time signals and transformsFourier transform and propertiesSampling and windowing operationsDiscrete-time signals and transforms

display
B, M, Doppler image
processingDoppler
processing
digital receive beamformer
system controlkeyboard
beamformercontrol
digital transmit beamformer DAC
high voltage
amplifier
ADCvariable
gain
T/R switch
arraybody
All digital
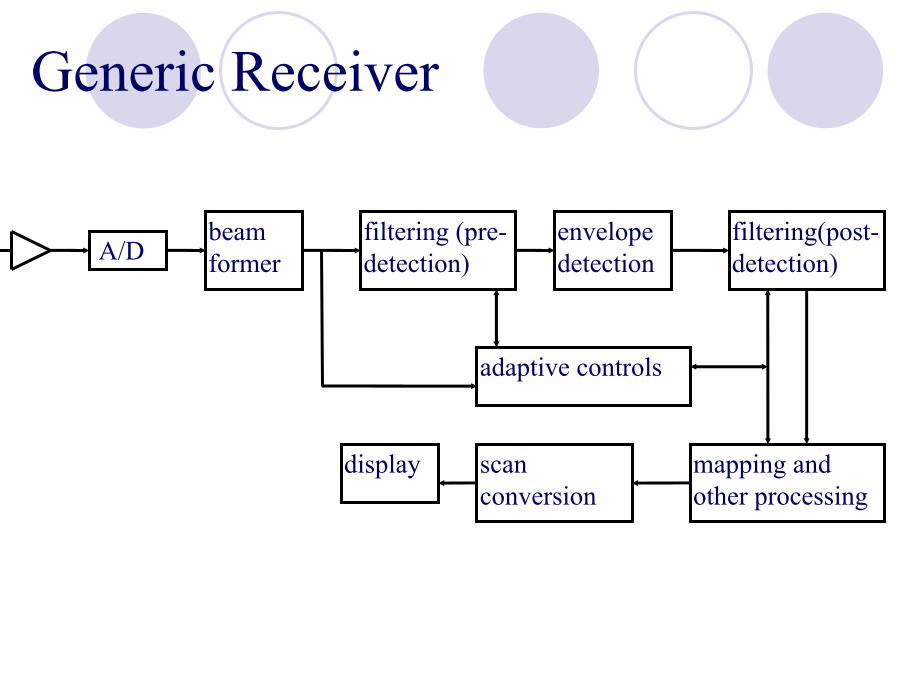
beam former
filtering (pre-detection)
envelope detection
filtering(post-detection)
mapping and other processing
scan conversion
display
adaptive controls
A/D
Generic Receiver
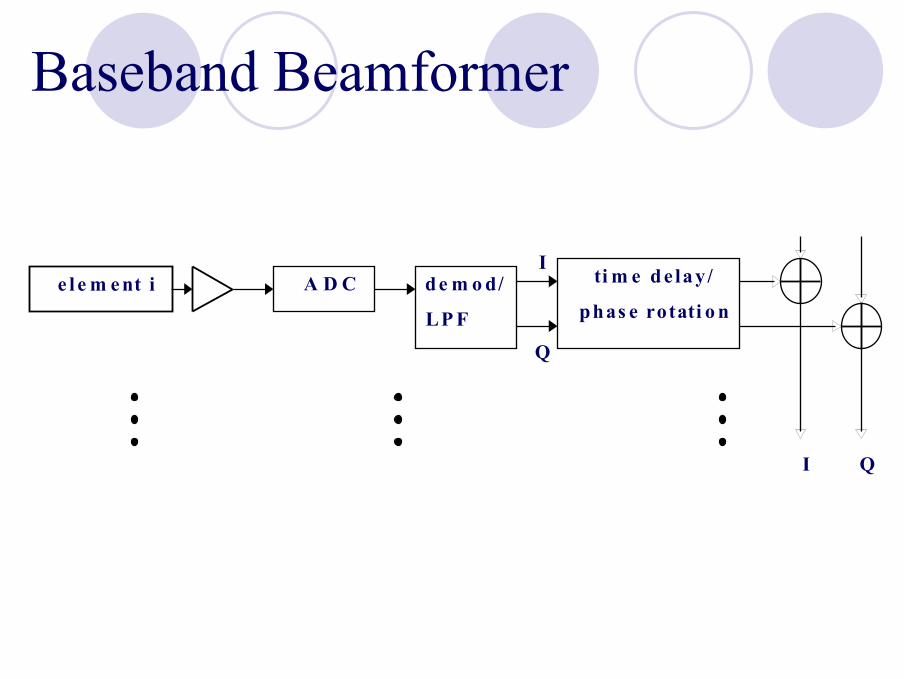
e l em ent i A D C dem od/
LPF
tim e de lay/
phas e rotati o n
I Q
I
Q
Baseband Beamformer

CW oscillator
PW transmitter (gated CW)
transducer amplifier
demod./LPF
filter spectral estimation
audio conversion
displayspeaker
signal processing
gating
sample&hold
PW Doppler

DSP Building Blocks in Imaging
FilterModulator/demodulatorDecimator/interpolatorFourier transformerHilbert transformerDetectorAutocorrelatorBeamformer

Hierarchy of Signal & System Properties
StochasticDeterministic
Time-invariant
Time-varying
Nonlinear
Linear

Temporal & Spatial Signal Distinction
Continuous-time (CT) signalsContinuous-space (CS) signals
Analog signalsDiscrete-time (DT) signalsDiscrete-space (DS) signals
Sampled-data signals (typically uniform sampling)Digital signals: DT or DS signals with quantized ampltitudes

Main Approach
All DT (DS) DSP theory is derived from the CT (CS) signal processing theory.Sampling scheme: one value per sampling point.Sampling scheme: uniform temporal (spatial) sampling intervals (will introduce periodicity).
[ ][ ] (m) interval Sampling: )(
(sec) interval Sampling: )(DmDxmy
TnTxnx==

Signal Representation Domains
t (time, sec) f (temporal frequency, cycles/sec=Hertz)d (space, m) k (spatial frequency, wavenumber, cycles/meter) or λ=1/k (wavelength, meters/cycle)(t, d) (propagating waves, coupled time and space signal) (f, k) Coupled frequencies (k=f/c)

Acoustic Wave Equations
∂∂
ρ ∂∂
2
2
2
2
w z t
tB
w z t
z
( , )( / )
( , )=
w z w e w ej z c j z c( , ) ( ) ( )/ /ω ω ωω ω= +−1 2
w z t w t z c w t z c( , ) ( / ) ( / )= − + +1 2

Complex Numbers and Complex Arithmetic
Required to define roots of polynomials:
Required to define solutions of linear differential (difference) equations:
012 =+z
0)()(2
2
=+ sXds
sXd

Complex Addition and Subtraction
[ ] [ ] [ ][ ] [ ] [ ]BABA
BABAImImImReReRe
±=±±=±

Complex Conjugate
222*
*
AaaAA
ajaAA
ajaAA
ir
ira
ira
=+=⋅
⋅−=−∠≡
⋅+=∠=
φ
φ

Complex Multiplication
[ ] [ ]]Im[]Im[],Re[]Re[ real, is if
ImRe)()(BkkBBkkBk
ABABbabajbabaBA riiriirr
==+=−⋅+−=⋅

Complex Division (Rationalization)
2222*
*
ir
riir
ir
iirr
aaababj
aaabab
AABA
AB
+−
+++
==

Complex Number in Exponential Form
Euler’s formula: Complex number in exponential form:
ααα sincos jje ±=±
ajeAAφ
=
0901∠=
−∠=
+∠=⋅
j
BA
BA
BABA
ba
ba
φφ
φφ

Complex Signals
Signals represented as a pair of linked real-valued signals:
{ }
(Q)component phase-quadratureor part imaginary :)((I)component phase-inor part real:)(
)()()(),()(
tyty
tyjtytytyty
i
r
irir ⋅+==

Complex Numbers in the Complex Plane
ai
ar
Aa
Aa
φ
φ
sin
cos
=
=
1−≡j
Rotating phasor
( )
0 tan180
0 tan
10
1
2/122
<
−±=
>
=
+=
−
−
rr
ia
rr
ia
ir
aaa
aaa
aaA
φ
φI/Q signals are 90o out of phase
))(cos()90)(sin( 0 tt θθ =+

Complex SignalsCreated from real-valued signals by operations such as
Complex modulation/demodulation (aka quadraturemodulation)Fourier transformationComplex filteringBaseband signal generation from memory
AdvantagesSimplifies mathematical analysisReduce hardware data ratesReduces arithmetic and filtering requirements for
modulation/demodulation/phase adjustment

Advantage of Complex Representation: Modulation as an Example
[ ]
[ ] ( ) ( )[ ])()(cos)()(cos)()(21)()(
)(cos)()( ),(cos)()(
)()()()(
)()( ,)()(
21212121
222111
)()(2121
)(22
)(11
21
21
tttttatatxtx
ttatxttatxor
etatatxtx
etatxetatxtt
tt
θθθθ
θθ
θθ
θθ
++−⋅=⋅
⋅=⋅=
⋅=⋅
⋅=⋅=+
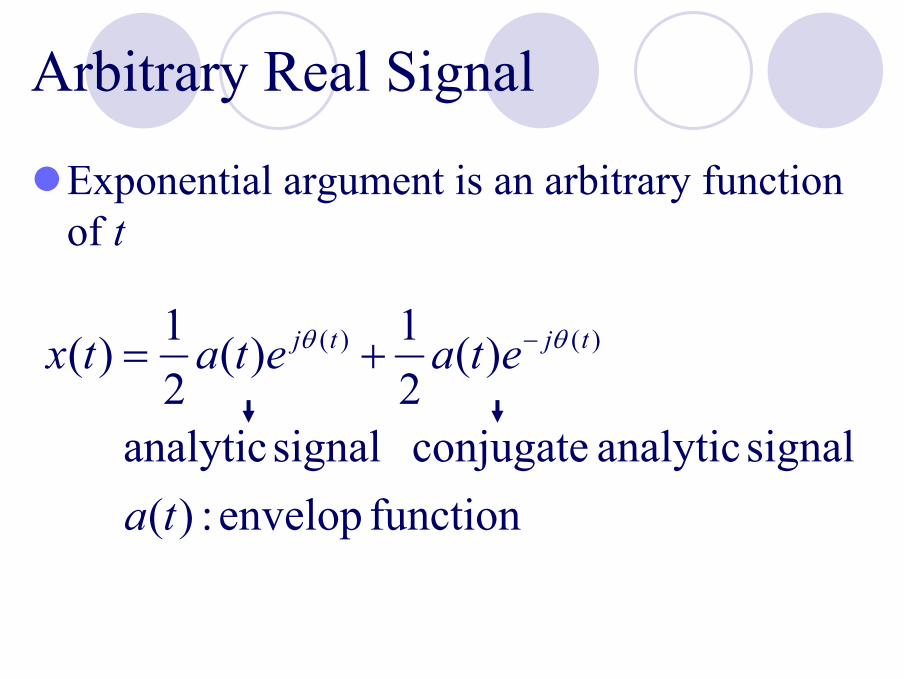
Arbitrary Real Signal
Exponential argument is an arbitrary function of t
function envelop :)( signal analytic conjugate signal analytic
)(21)(
21)( )()(
ta
etaetatx tjtj θθ −+=

Do Negative Frequencies Exist?

Continuous-Time Signals and Transforms

Continuous-Time System Response
Consider responses to the following inputsComplex exponential signalComplex sinusoidal signalModulated Gaussian signalImpulse function (limit of Gaussian signals)
h(t)x(t) y(t)
)()()()(
)()()()()(
thtxtxth
dxthdtxhty
∗=∗=
−=−= ∫∫∞
∞−
∞
∞−ττττττ

Continuous-Time System Response to Complex Exponential
Motivation for Laplace transform
exists integral where and limitsfor )( of transformLaplace theis )( where
),()()(
,)(Let )(
sthsH
sHedehty
jsetxt stts
st
∫ ∞−
− ==
+==
ττ
ωστ
est is an eigenfunction of the LTI CT systemH(s) is the continuous-time system function

Continuous-Time System Response to Complex Sinusoidal Signal
Motivation for Fourier Transform
)( of ansformFourier tr theis )( where
)()()(
sincos)(,0Let
-
thH
dehHjsH
tjteetxjsj
tjst
ω
ττωω
ωωωωτ
ω
∫∞
∞
−===
+===+=
Fourier transform of the system temporal function is the system response function to input complex sinusoidal signals
{ }tethFTLT σ)(=

Gaussian Signals
Unmodulated Gaussian Signal (the transform is also Gaussian)
2222
)()( / TfTt TefGetg ππ −− =⇔=Modulated Gaussian Signal (with complex sinusoid)
22)(
2 )()()()()(Tff
ctfj
c
c
ATe
ffAfGfXAetgtx−−=
−∗=⇔=π
π δ

Body Ultrasound Attenuation Filter
I(z) I(z+∆z)
z z+∆z
A
A I z z A I z A I z z⋅ + = ⋅ − ⋅( ) ( ) ( )∆ ∆2β
− = ⋅
= −
∂∂
β
β
I z
zI z
I z I e z
( )( )
( )
2
02
β α= f
Frequency domain attenuation response

Body Ultrasound Attenuation Filter
H z f e fz j fz c( , ) ( / )= − +α π2
I z f I H z f I e fz( , ) ( , )= = −0
2
02α

Body Ultrasound Attenuation Filter
Assuming a Gaussian signal:
S f et
f f
( )( )2
0 2
=−
−σ
S R f S f e er tRf
f fRf
( , ) ( )( )2 2 4
40 2
= =−−
−−α σ
α
S R f e er
f fR f R
( , )( )
( )2 41 2
02
=−
−− −σ α σ α
f f R1 022= − σ α .
0R2R
f


Impulse Function
Introduced in 1947 by DiracUseful signal processing tool for
Sampling operationsRepresenting the transform of sinusoidal signals
Impulse is a brief intense unit-area pulse that exists conceptually at a point
1)( =∫∞
∞−dttδ

Impulse Function
Visualize as a limiting sequence of a window function, such as a Gaussian window
∫∞
∞−
−
→=1)(lim 1
0dttgT
T
g(t)
g(t) G(ω)
lim lim

Impulse Function
PropertiesProduct
Convolution
Convolution with an impulse results in a shift operation
)()()()()()0()()(
τδττδδδ
−=−=
txttxtxttx
)()()()()()(
ττδδ
−=−∗=∗
txttxtxttx

Continuous-Time System Response to Impulse Function
Thus, h(t) has the interpretation as the impulse response of the continuous-time system (filter).
∫ ∞−=−=
=t
thdthty
ttx
)()()()(
)()(Let
ττδτ
δ
Fourier Transform and Properties

The Fourier Transform
Forward Fourier transform (generally complex-valued)
Reverse (backward) Fourier transform
Base Fourier transform from which all other Fourier transform variations are derived.
{ } ∫∞
∞−
−== dtetxXtxFT tjωω )()()(
{ } ∫∞
∞−
− == ωωω ω deXtxXFT tj)()()(1
The Fourier TransformDistinguishing terminology
aka Continuous-Time, Continuous-Frequency Fourier Transformaka Continuous-Time, Fourier Transform (CTFT) where “transform” conveys the idea of continuous-frequency (Fourier “series” conveys discrete-frequency)
Fourier transform amplitude and phase functionsAmplitude response, magnitude response, amplitude spectrumPhase response, angle response, phase spectrumContrast these with temporal signal amplitude and phase functions

Even-Odd Signal Decomposition and Fourier Transform Properties
Any function can be separated into even and odd components:
Transform
[ ] [ ])()(21)(,)()(
21)( where
)()()(
txtxtxtxtxtx
txtxtx
oddeven
oddeven
−−=−+=
+=
)()()( ωωω oddeven XXX +=

Even-Odd Signal Decomposition and Fourier Transform Properties
{ } { } { } { }
{ } { } { } { })(Im)(Re)(Im)(Re)(
)(Im)(Re)(Im)(Re)(
ωωωωω oddoddeveneven
oddoddeveneven
XjXXjXX
txjtxtxjtxtx
+++=
+++=
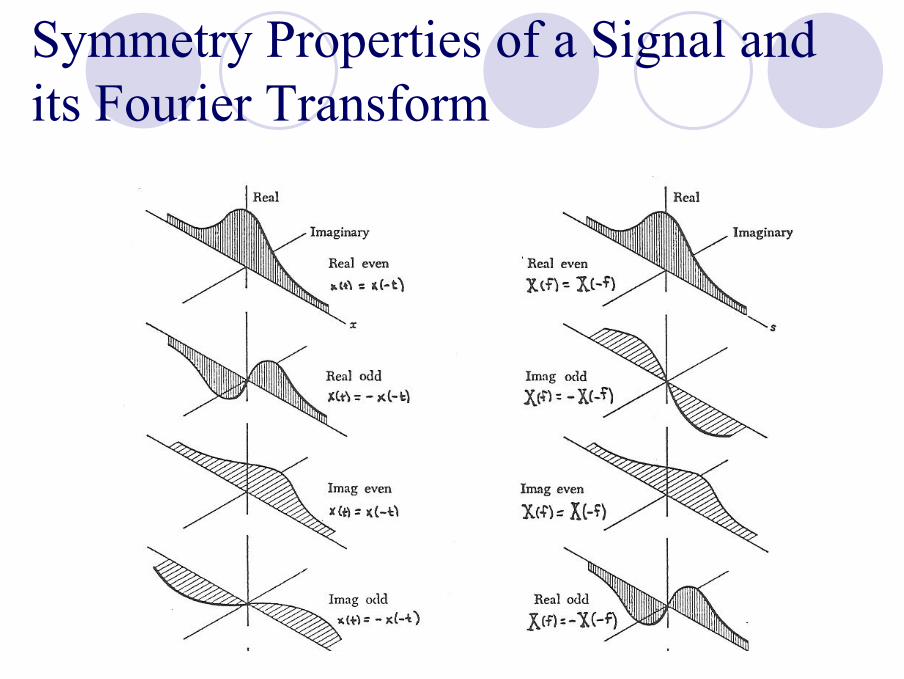
Symmetry Properties of a Signal and its Fourier Transform
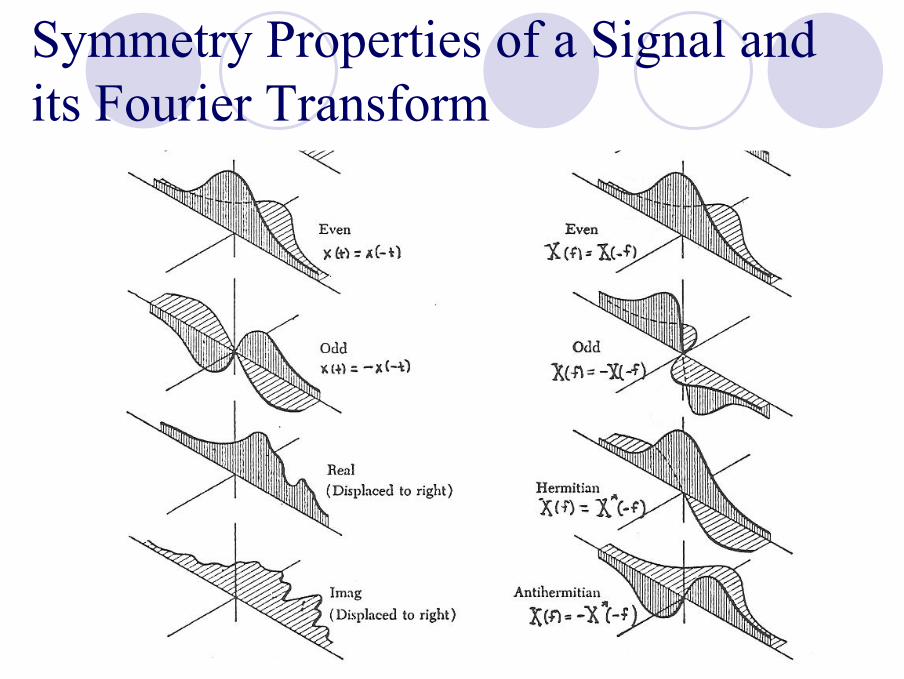
Symmetry Properties of a Signal and its Fourier Transform

Visualizing the System Response

The Logarithmic Scale
Definition of decibel (dB)
If P=V2/R
)/(log10 10 refPPdB =
)/(log20)/(log10 1022
10 refref VVVVdB ==

Summary of Key CTFT Properties and Functions

Special Signals and Their Transforms
Cosine signal
Time-domain window function (akarectangular window)
tfjtfjc
cc eetftx πππ 22
21
212cos)( −+==
tttcTfcT
TtTt
TttT π
πsin)(sin),2(sin22/,02/,2/1
2/,1)( =⇔
>=
<=Π
X(f)
+fc-fc
T/2-T/2
X(f)
1/T-1/T

Special Signals and Their Transforms
Frequency-domain window function
F/2-F/2
1/F-1/F )()2(sin2 fFtcF FΠ⇔

Sign Function
Will be useful to develop the Hilbert transform
fjfX
ttt
ttxπ−
=⇔
<−=>
== )(0,1
0,00,1
)sgn()(

Impulse Train
Infinite periodic sequence of impulse functions spaced T seconds apart
Transform is another impulse train
∑∞
−∞=
−n
nTt )(δ
-2T-3T -T 0 T 2T 3T
-2F-3F -F 0 F 2F 3F
1
F=1/T
∑∞
−∞=
−m T
mfT
)(1 δ

Impulse Train
Properties:Product: In this case, the impulse train is called a sampling function.
Convolution: In this case, the impulse train is called a replicating function.
∑∞
−∞=
−n
nTtnTx )()( δ
∑∞
−∞=
−m
mTtx )(

Graphical Illustration of Sequence of Impulse Functions

Graphical Illustration of Sequence of Impulse Functions

Energy Preservation Between Domains
Parseval-Rayleigh theorem
Energy theorem (let x(t)=y(t))
Energy spectral density
∫∫∞
∞−
∗∞
∞−
∗ = dffYfXdttytx )()()()(
energydffXdttxE === ∫∫∞
∞−
∞
∞−
22 )()(
2)( fX

Matched Filter
Objective: Determine system (filter) response h(t) that maximizes the output energy of the system responses for the given input signal (assuming max is reached by time t=t0).
Based on Schwarz inequality{ }∫ ∞−
−=−= 0 )()()()()( 100
tfHfXFTdttthtxty
∫∞
∞−
∗∗
⋅=
−==
dffHEty
ttcxthfcXfH22
0
0
)()(
)()(or )()(
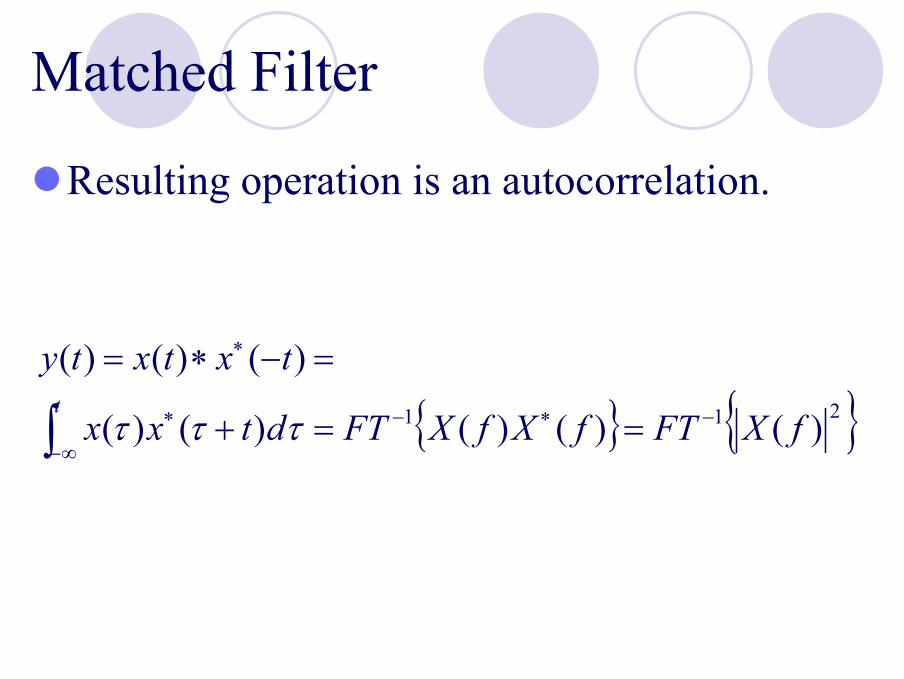
Matched Filter
Resulting operation is an autocorrelation.
{ } { }211 )()()()()(
)()()(
fXFTfXfXFTdtxx
txtxtyt −
∞−
∗−∗
∗
==+
=−∗=
∫ τττ

Matched Filter and SNR
Assume the noise input to the filter (XN(f)) is uncorrelated with the filter and has frequency independent distribution as a function of frequency. We have
The output noise power becomes
X f NN ( )2
0≡
dtthNdffHNdffHfX N ∫∫∫∞
∞−
∞
∞−
∞
∞−=== 2
0
2
022 )()()()(σ

Matched Filter and SNR
When using the matched filter
The maximum signal-to-noise ratio is determined only by its total energy E, not by the detailed structure of the signal.
00
2
0
02
max
)()(
NE
N
dttx
N
dtttxSNR ≡=
−= ∫∫
∞
∞−
∞
∞−

Time-Bandwidth Product
Approach using the area metric
Rule of thumb: bandwidth of the pulsed signal is roughly the reciprocal of the signal’s time duration.
1
)0(/)(
)0(/)(
=⋅
=
=
∫∫∞
∞−
∞
∞−
βα
β
α
XdffX
xdttx

Time-Bandwidth Product
Approach using the variance metric
Equality when x(t) is Gaussian.Other metrics may be required to handle special cases (e.g., bandpass signals with no content near DC).
constant a
/)(4
/)(4
2222
2222
≥⋅
=
=
∫∫∞
∞−
∞
∞−
βα
πβ
πα
EdffXf
Edttxt

Range and Velocity Accuracy in Doppler Estimation
Let
With a matched filter, we have (the maximum occurs at t=0)
With noise, the maximum may shift to ∆t. Our goal is to derive < ∆t2 >
x t x t n t( ) ( ) ( )= +0
h t x t( ) ( )= −0
y t x x t d n x t d y t n x t d( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )= − + − ≡ + −−∞
∞
−∞
∞
−∞
∞
∫ ∫ ∫0 0 0 0 0τ τ τ τ τ τ τ τ τ

Range and Velocity Accuracy in Doppler Estimation
Taylor expansion
We havey t y
ty R0 0
2
002
0( ) ( ) ( )∆∆
= + ′′ +
y t y t y E R0
2
0
2 200 0( ) ( ) ( )∆ ∆= + ′′ +
y t y E t02
02 2 2 20( ) ( )∆ ∆− = −β

′′ = ′′ −−∞
∞
∫y t x t x d0 0 0( ) ( ) ( )τ τ τ
′′ = ′′ = −−∞
∞
−∞
∞ ∗
∫ ∫y x x d f X f X f df0 0 02 2
0 00 4( ) ( ) ( ) ( ) ( )τ τ τ π
βπ π
2
2 20 0
0 0
2 20 04 4
≡ =−∞
∞ ∗
∗
−∞
∞−∞
∞ ∗
∫∫
∫f X f X f df
X f X f df
f X f X f df
E
( ) ( )
( ) ( )
( ) ( )
′′ = −y E020( ) β
Range and Velocity Accuracy in Doppler Estimation
Define a noise signal
We have
ε τ τ τ202
02
0
20≡ − ≡
−∞
∞
∫y y t n x d( ) ( ) ( ) ( )∆
ε β20
2 2 2= =N E E t∆
∆tE N
2
20
1=β ( / )

Range and Velocity Accuracy in Doppler Estimation
Similarly
Thus
Gaussian signals give poorer simultaneous measurements of time and frequency than any other signal.
∆fE N
2
20
1=α ( / )
[ ]∆ ∆t fE N
2 21 2
0
1/
( / )=αβ

Essentially Time-Limited and Band-Limited Signals
Signals cannot be simultaneously band-limited and time-limited.Important for discrete-time applications that signal be band-limited (for sampling) and also for pulses to be time-limited (finite memory)

Essentially Time-Limited and Band-Limited Signals
Essentially time-limited
Essentially band-limited
f
T
T
ftjTL dtetxfXfXfX επ ≤−=− ∫−
−22/
2/
22 )()()()(
t
B
B
ftjBL dfefXtxtxtx επ ≤−=− ∫−
22/
2/
22 )()()()(

Analytic and Causal Signals
Causal and analytic signals are dual scenarios that link I/Q components through a Hilbert transformCausal signal is a signal that is 0 over negative time.Analytic signal is a complex signal with a transform that is 0 over negative frequency; created from a real signal.

Analytic and Causal Signals
Causal signal
Analytic signal
[ ]
ffjXfX
fjffXfX
ttxtxtxtx
eee
eoe
ππδ 1)()(1)()()(
)sgn(1)()()()(
∗−=
−∗=
+=+=
[ ])sgn(1)()(
1)()(1)()()(
ffXfXt
tjxtxt
jttxtx
a
a
+=
∗−=
−∗=
ππδ

Hilbert Transform
Transforms time time or frequency frequency
{ } ∫∞
∞− −=∗−= τ
ττ
ππd
tx
ttxtxHT
)()(11)()(

Sampling and Windowing Operations

Frequency Definitions
Signal frequencyF (units of cycles per second, Hz)
Sampling rateF=1/T, T is sampling interval in seconds (per sample)Units of samples per second
Fraction of sampling ratef/F=fT, dimensionless ratio (or cycles per sample)Bounded by +/- 0.5 (normalized frequency)

Band-Limited Transform Definitions for Continuous-Time Signals
Baseband (lowpass) real signal
Real bandpass signal
Complex signal of one-sided baseband real signal
Compex signal of one-sided bandpass real signal
Baseband complex signal
f
f
f
f
f
B

Creating One-Sided Complex LowpassSignals from Real Lowpass Signals
Analytic lowpass signalTime-domain approach
Frequency-domain approach
Delay
HT FIlter
x(t) xr(t)
xi(t)
Zero out -fx(t) {xr(t), xi(t)}IFTFT

Creating Baseband Complex Signals from Real Bandpass SignalComplex demodulation (quadratic demodulation)
Original
Band-shift
Low pass filter
Implementation

Four Basic Sampling and Windowing Operations Linking CT and DT Signals
Time sampling:Creates discrete-time signal (i.e., a time series)
Frequency windowing:Creates frequency-limited (i.e., band-limited) signal
Frequency sampling:Creates discrete frequency transform (i.e., a Fourier series)
Time windowing:Creates time-limited signal
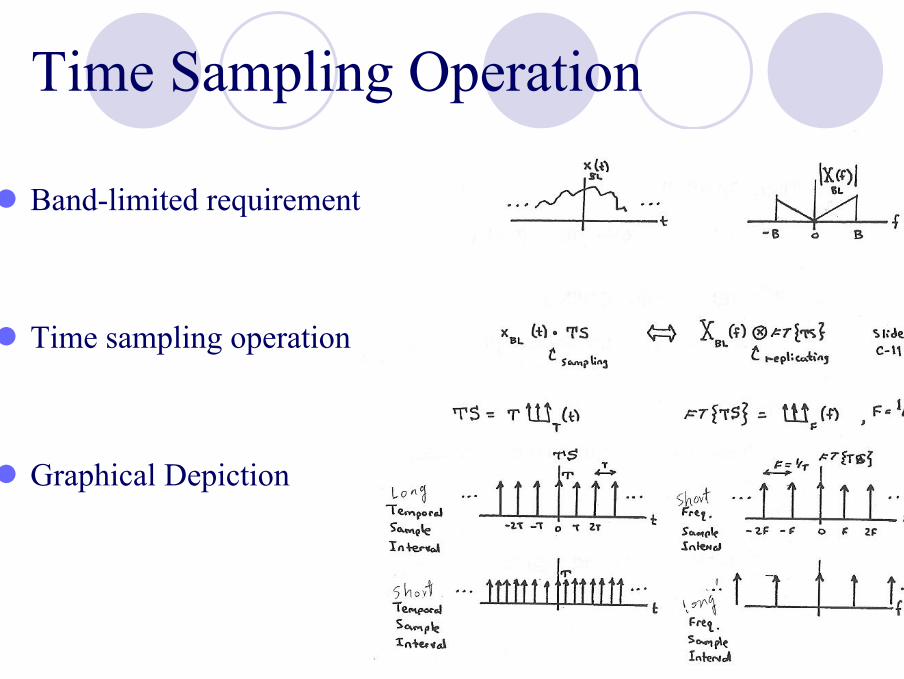
Time Sampling Operation
Band-limited requirement
Time sampling operation
Graphical Depiction

Selecting the Sampling Rate
Real baseband caseComplex baseband caseReal bandpass case

Sampling Real Baseband Signals
Case 1
Case 2
Case 3
BT
21
>
BT
21
<
BT
21
=
∑∑∞
−∞=
∞
−∞=
−⇔−=⋅=k
BLn
BLBLTS kFfXnTtnTxTTStxtx )()()()()( δ

Strictly Band-Limited Signals Do Not Exist in Practice
Some degree of aliasing cannot be avoided in actual hardwareAnalog anti-aliasing filters are imperfectAnalog-to-digital converters introduce digitization noise
Select sample rate based on bandwidth at which the signal is essentially band-limited.

Sampling Complex Baseband Signals
Signal and transform
Case 1
Case 2
Minimum sampling rate for complex baseband signal: F=B.
BT
21
=
BT 1=

Sampling Real Bandpass Signals
Depending on relationship between F and B, can actually select sampling rate as low as F=2B (baseband sampling theorem).Demodulation is free!!!
)2
(2 BfF c +=
integeran is ;2
2 mBBmfc +=
Sampling Real Bandpass Signals
The above discussion is only valid for narrow band applications (fractional bandwidth is 40% when m=1).

Frequency Windowing Operation
Reconstruction of band-limited CT signal from DT signalSignal and transform
Define frequency windowing operation (ideal low pass filter)

Frequency Windowing Operation
Recover original transform by
Symbolic expression of the temporal sampling theorem
{ } FWfXFWFTtx TSTS ⋅⇔∗ − )()( 1
∑∞
−∞=
−=n
BLBL TnTtcnTxtx )/]([sin)()(
[ ] { } { }[ ] FWTSFTfXfXFWFTTStxtx BLBLBLBL ⋅∗=⇔∗⋅= − )()()()( 1

Frequency Sampling OperationDual to time sampling operationAssume continuous-time signal is time-limited, rather than band-limited
Criteria to avoid temporal aliasing
0
1T
F ≤′

Frequency Sampling OperationFrequency sampling operation

Time Windowing Operation
Signal and transform
Define one-sided time windowing operation

Time Windowing Operation
Recovering original time signal
Symbolic expression of frequency-domain sampling theorem
{ }TWFTfXTWtx FSFS1)()( −∗⇔⋅
∑∞
−∞=
′− ′′−′′=k
FSfTj
TL FFkfcFkXeTtX )/]([sin)()( π
{ }[ ] [ ] { }TWFTFSfXfXTWFSFTtxtx TLTLTLTL ∗⋅=⇔⋅∗= − )()()()( 1

Uniform
(Rectangular)
Barlett
(Triangular)
Hann(ing)

Discrete-Time Signals and Transforms

Questions: How many Fourier Transforms?
Fast Fourier Transform (FFT)Discrete-Time Fourier Transform (DTFT)Continuous-Time Fourier Series (CTFS)Continuous-Time Fourier Transform (CTFT)Discrete Fourier Transform (DFT)Fourier Series (FS)Discrete-Time Fourier Series (DTFS)

Answer: Just One!!!
Fundamental: Continuous-Time Fourier Transform (CTFT)All other Fourier-Based transforms are derivable from the CTFT under specific signal conditions
Signal and Transform Relationships Using Both Time Sampling and Frequency Sampling
General operationsTime limiting/Band limitingInterpolationSamplingReplicating to create periodicity

Signal and Transform Relationships Using Both Time Sampling and Frequency Sampling
Special case of four operations for scenario to derive DTFS (aka DFT)

Four FTs through Sampling and Windowing

Graphical Representation of the Four Steps: CTFT DTFT DTFS
Original
FW
TS
TW
FS

Continuous-Time Fourier Transform
Transforms
Energy preservation theorem
Convolution theorem
∫∫∞
∞−
∞
∞−
−
=
=
dfefXtx
dtetxfX
ftj
ftj
π
π
2
2
)()(
)()(
∫∫∞
∞−
∞
∞−= dffXdttx 22 )()(
)()()()()()()()(
fYfXtytxfYfXtytx
⋅⇔∗∗⇔⋅

Discrete-Time Fourier Transform
Operations
Symbolic

Discrete-Time Fourier Transform
Transforms
Energy preservation theorem
Convolution theorem
[ ]nxdfefXnTx
enTxTfX
T
T
fnTjDTFTDTFT
n
fnTjDTFT
==
=
∫
∑
−
∞
−∞=
−
2/1
2/1
2
2
)()(
)()(
π
π
∫∑ −
∞
−∞=
=T
T DTFTn
DTFT dffXnTxT2/1
2/1
22 )()(
)()()()()()()()(
fYfXnTynTxfYfXnTynTx DTFTDTFTDTFTDTFT
⋅⇔∗∗⇔⋅

Periodic Convolution
∫− ′′′−=⊗T
TDTFTDTFT fdfYffXfYfX2/1
2/1)()()()(

Some Discrete-Time Fourier Transform Properties
Transform of most interest in our caseCan be computed at uniform frequency spacings for time-limited signals using the DTFS (aka DFT)Maintains CTFT even-odd properties and real-imaginary propertiesTime shiftFrequency shiftOne-sided rectangular window

![Mandalas All Around Us2[1]](https://static.fdocuments.us/doc/165x107/55542be2b4c905987e8b4ff6/mandalas-all-around-us21.jpg)















![Utlimate Sniper Chapter 20 US2[1]](https://static.fdocuments.us/doc/165x107/577d1e981a28ab4e1e8ed3bf/utlimate-sniper-chapter-20-us21.jpg)
