Developments in Acoustic Inertial Positioning · Smooth position on acoustics High Update rate...
44
Developments in Acoustic Inertial Positioning PHINS RAMSES Metrology – An Update The Hydrographic Society In Scotland, 25th April 2012 Jim Titcomb – Offshore Technical Manager, iXBlue Limited
Transcript of Developments in Acoustic Inertial Positioning · Smooth position on acoustics High Update rate...

Developments in Acoustic Inertial Positioning PHINS RAMSES Metrology – An Update
The Hydrographic Society In Scotland, 25th April 2012
Jim Titcomb – Offshore Technical Manager, iXBlue Limited

2 iXBlue Acoustic Inertial Positioning Contents
Building blocks
iXBlue philosophy
Track record
Metrology method
Metrology results
Summary

3 iXBlue Acoustic Inertial Positioning Building blocks
Building
blocks
DP, OOS, Metrology, etc
GAPS RAMSES MMI & software
PHINS OCTANS POSIDONIA Transponders
FOG Acoustics Mechanical Electronics Software
Solutions
Integrated
products
Products
Technologies

4 iXBlue Acoustic Inertial Positioning General philosophy: OWN THE TECHNOLOGY
Why?:
Maintain control of supply
Export control factors – eliminate US components
Detailed understanding
Reactivity
iXBlue manufacture :
Specialist fiber , gyros & optical components
Accelerometers
Transducers
Control of the core technologies
iXBlue is one of the world leaders in manufacture of high grade gyros
5 iXBlue Acoustic Inertial Positioning General philosophy: OPEN APROACH
Hardware:
Generic interfacing
Library:
Documented
Third party sensors
Standards
Can & will implement new protocols when requested
Facts:
Our INS can interface to any USBL/LBL/DVL/GPS etc
RAMSES can interface to other manufacturer’s beacons
iXBlue have provided IMU90 to Kongsberg for use in HAIN ≈ 20 units
iXBlue have provided ROVINS IMU to Fugro for use with Fine Track
iXBlue are providing IMU 50 to CDL for TOGS II

6 iXBlue Acoustic Inertial Positioning General philosophy: PERFORMANCE
Master Technology
Optimisation through understanding
History
PHINS a market standard, proven up to 85deg lat North
3,000+ OCTANS operated worldwide
FOGs since 1980s
PHINS on the market for 10 years
Inertial & Acoustic complement each other
But, the heart of the system is the Kalman Filter
Any sensor
Real time output
No topside
Post processing option

7 iXBlue Acoustic Inertial Positioning Track Record – PHINS & HiPAP for Pipeline Survey
USBL DVL (Post Processed)
PHINS DVL (Real Time)

8 iXBlue Acoustic Inertial Positioning Track Record – ROVINS & GAPS for Touchdown Monitoring GOM
Who & what: C&C Gulf of Mexico
Monitor Pipe lay Position
iXBlue solution : GAPS + ROVINS
GAPS on 10m pole
ROVINS DVL calibrated in field
High noise due to DP
Acoustic dropouts, masking & thrusters
ROVINS rejects USBL spikes
SV profile recorded on ROV decent
Wd 600-1000ft, layback 1500ft
“I believe this represents a great step forward for C&C and the Gulf of Mexico” Jake Klara C&C

9 iXBlue Acoustic Inertial Positioning Track Record – ROVINS & GAPS for Towfish Positioning
Equipment mobilized:
Standard GAPS installed in a moon pool (permanent installation)
ROVINS on the tow fish (Edgetech)
MT832E (integral head) transponder
Depth sensor
GPS and laptop on surface
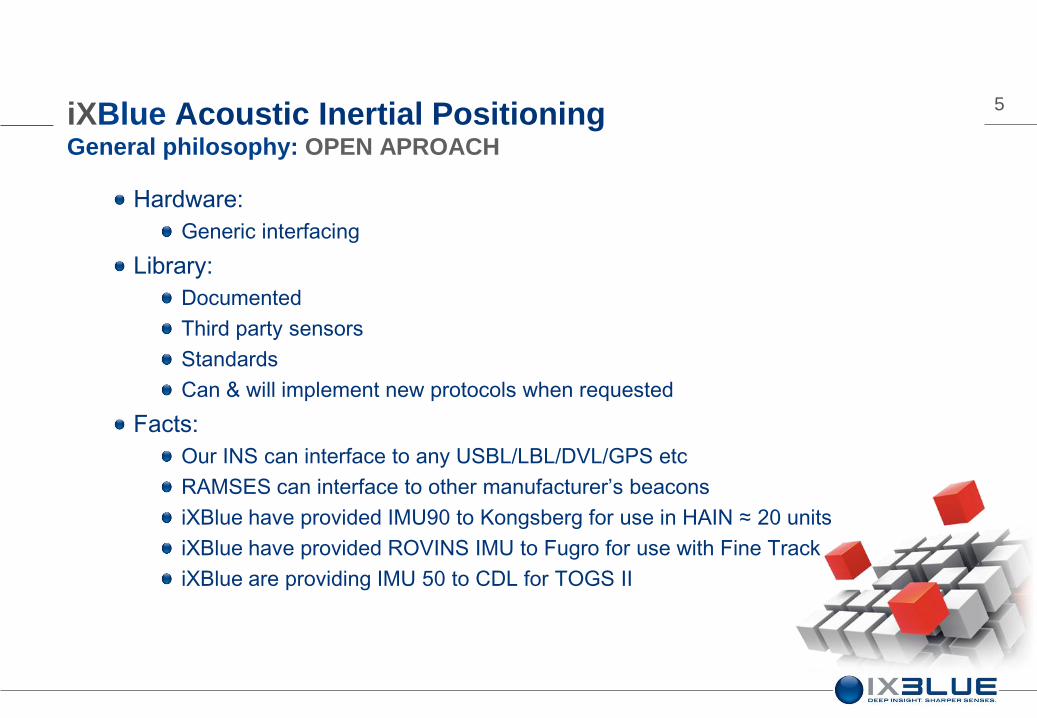
10 iXBlue Acoustic Inertial Positioning Track Record – ROVINS & GAPS for Towfish Positioning
Distance (m) N-S S-N W-E E-W
N-S - 0.22 0.65 0.52
S-N 0.22 - 0.68 0.47
W-E 0.65 0.68 - 0.3 E-W 0.52 0.47 0.3 -
Target picked on four passes
ROVINS heading and position
No post processing
Jitter both ways on Multiplexer
Largest error = 68cm
11 iXBlue Acoustic Inertial Positioning Open Architecture – NASNet®
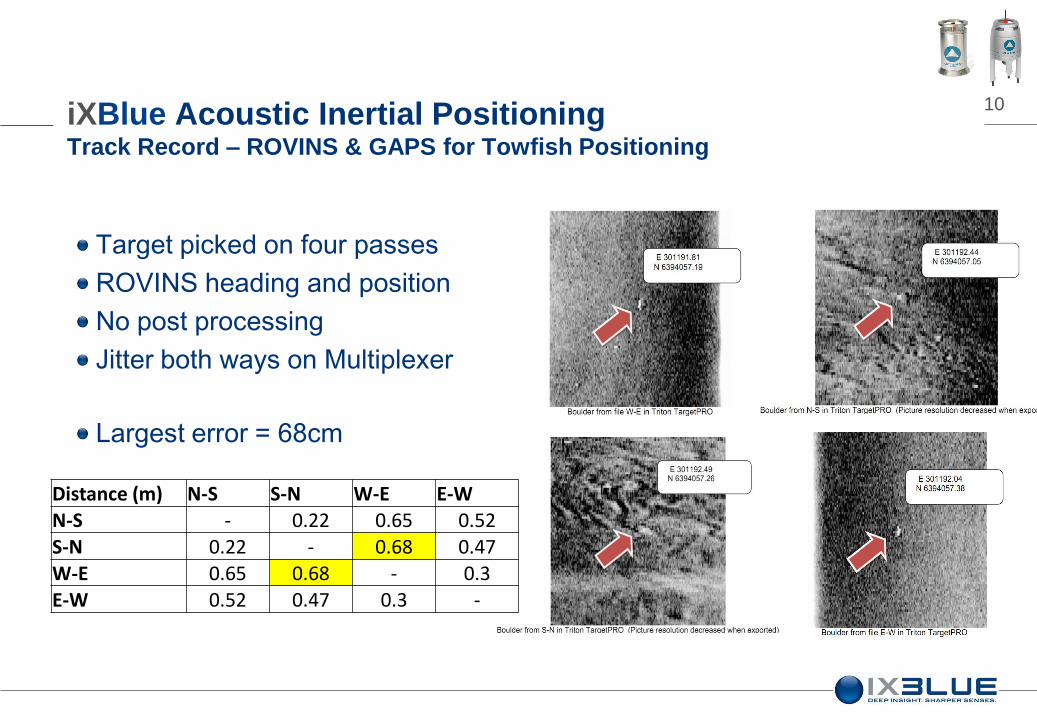
Who and What: Dynamic Positioning
Providing Robust Positioning even without GPS
Smooth position on acoustics
High Update rate
Reduce spikes
Better station keeping
Robust Positioning
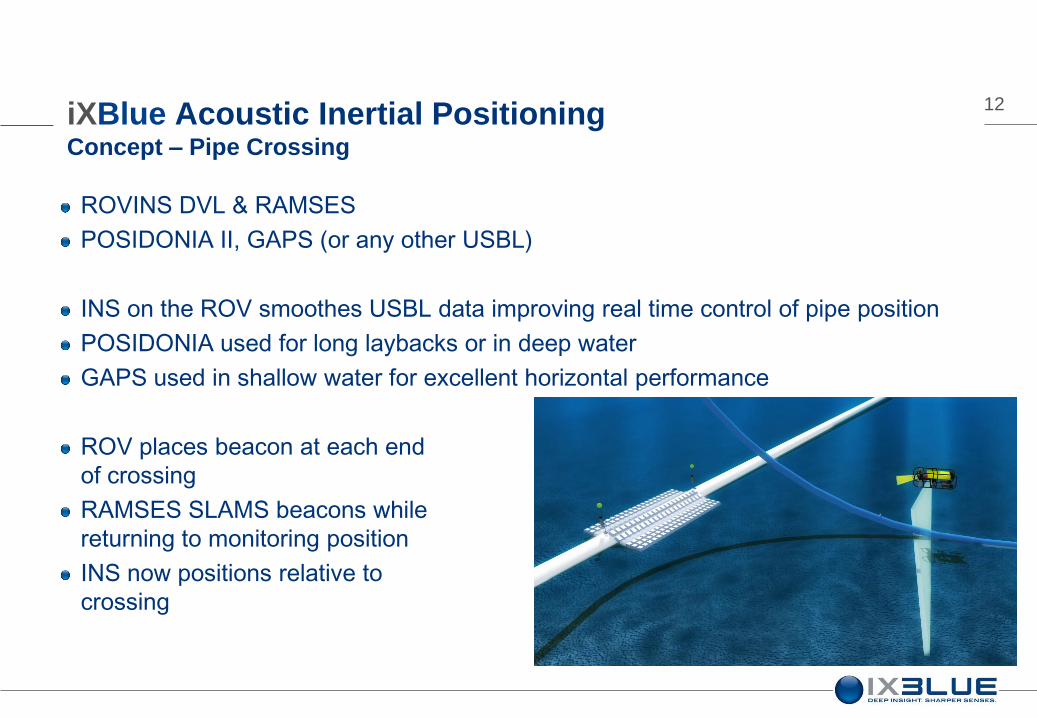
12 iXBlue Acoustic Inertial Positioning Concept – Pipe Crossing
ROVINS DVL & RAMSES
POSIDONIA II, GAPS (or any other USBL)
INS on the ROV smoothes USBL data improving real time control of pipe position
POSIDONIA used for long laybacks or in deep water
GAPS used in shallow water for excellent horizontal performance
ROV places beacon at each end
of crossing
RAMSES SLAMS beacons while
returning to monitoring position
INS now positions relative to
crossing
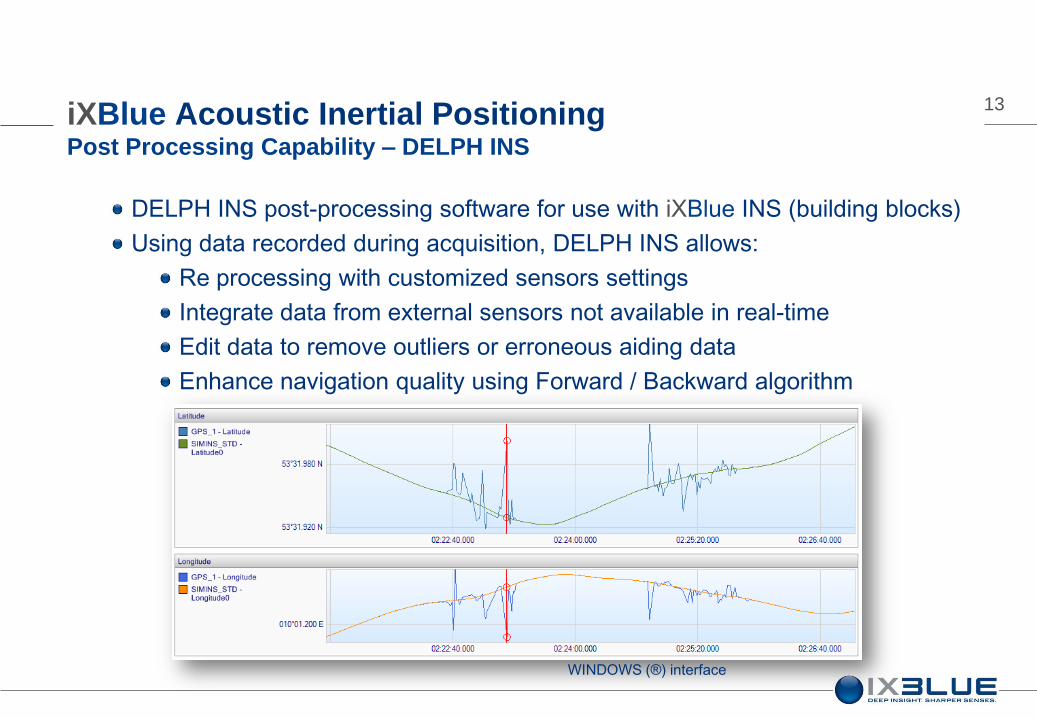
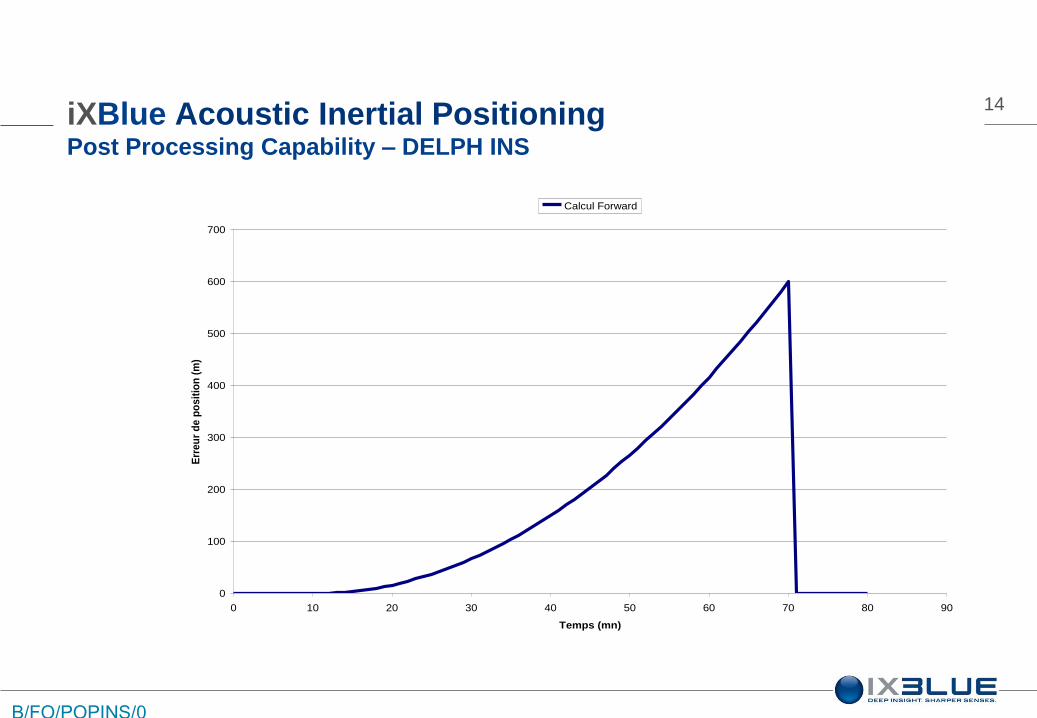
13 iXBlue Acoustic Inertial Positioning Post Processing Capability – DELPH INS
DELPH INS post-processing software for use with iXBlue INS (building blocks)
Using data recorded during acquisition, DELPH INS allows:
Re processing with customized sensors settings
Integrate data from external sensors not available in real-time
Edit data to remove outliers or erroneous aiding data
Enhance navigation quality using Forward / Backward algorithm
WINDOWS (®) interface
14
0
100
200
300
400
500
600
700
0 10 20 30 40 50 60 70 80 90
Temps (mn)
Err
eu
r d
e p
os
itio
n (
m)
Calcul Forward
B/FO/POPINS/0
04 Ed. D
iXBlue Acoustic Inertial Positioning Post Processing Capability – DELPH INS

15
0
100
200
300
400
500
600
700
0 10 20 30 40 50 60 70 80 90
Temps (mn)
Err
eu
r d
e p
os
itio
n (
m)
Calcul Forward Calcul Backward
B/FO/POPINS/0
04 Ed. D
iXBlue Acoustic Inertial Positioning Post Processing Capability – DELPH INS

16
0
100
200
300
400
500
600
700
0 10 20 30 40 50 60 70 80 90
Temps (mn)
Err
eu
r d
e p
os
itio
n (
m)
Calcul Forward Calcul Backward Lissage
B/FO/POPINS/0
04 Ed. D
iXBlue Acoustic Inertial Positioning Post Processing Capability – DELPH INS

17
0
100
200
300
400
500
600
700
0 10 20 30 40 50 60 70 80 90
Temps (mn)
Err
eu
r d
e p
os
itio
n (
m)
Calcul Forward Calcul Backward Lissage
B/FO/POPINS/0
04 Ed. D
iXBlue Acoustic Inertial Positioning Post Processing Capability – DELPH INS

18 iXBlue Acoustic Inertial Positioning Post Processing Capability – DELPH INS – HiPAP & PHINS DVL
Out of Straightness survey
Real time image
Post processed image

19 iXBlue Acoustic Inertial Positioning Track Record - OOS operations – HiPAP & PHINS DVL
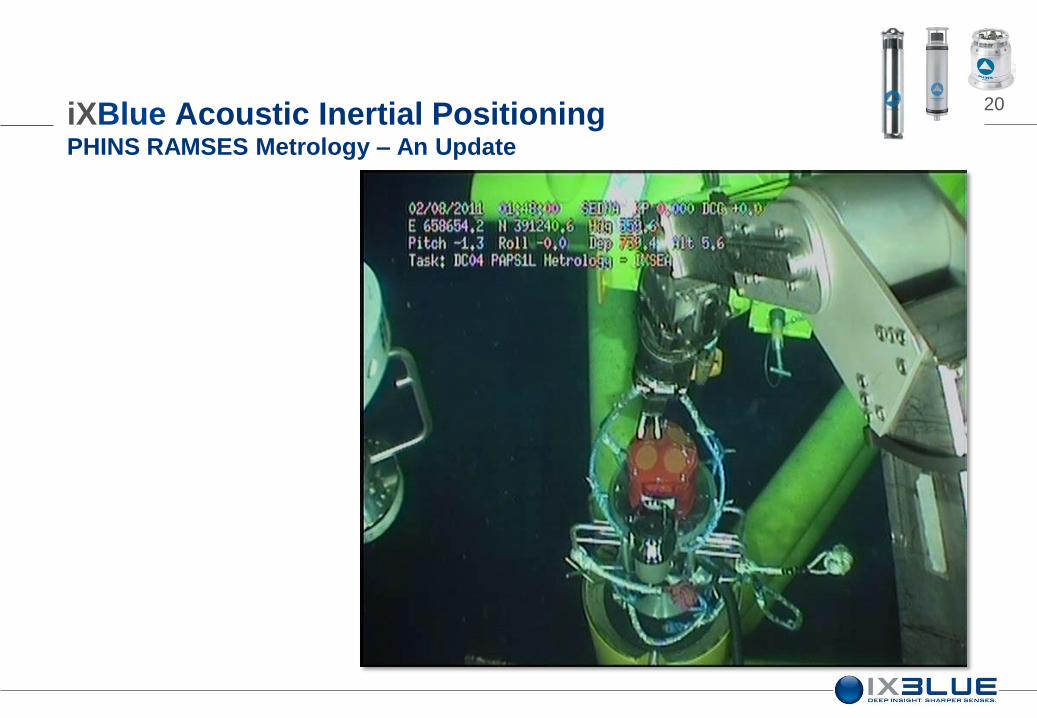
20 iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – An Update

21
MANIFOLD
PLEM/PLET (pipeline end manifold /
pipeline end termination)
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – An Update
22
Pure Inertial method
operational, efficient (on short distance)… but black box
INERTIAL only
Pure acoustic method (LBL)
proven, accurate, but expensive (time consuming)
ACOUSTICS only
iXBlue method combines both technologies and offers
☑ massive vessel time saving
☑ an extremely robust and reliable method
☑ the best of each technology
☑ simple to use
A perfect combination
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – An Update

23
PHINS 6000 Inertial Navigation system
The best commercial INS in its class
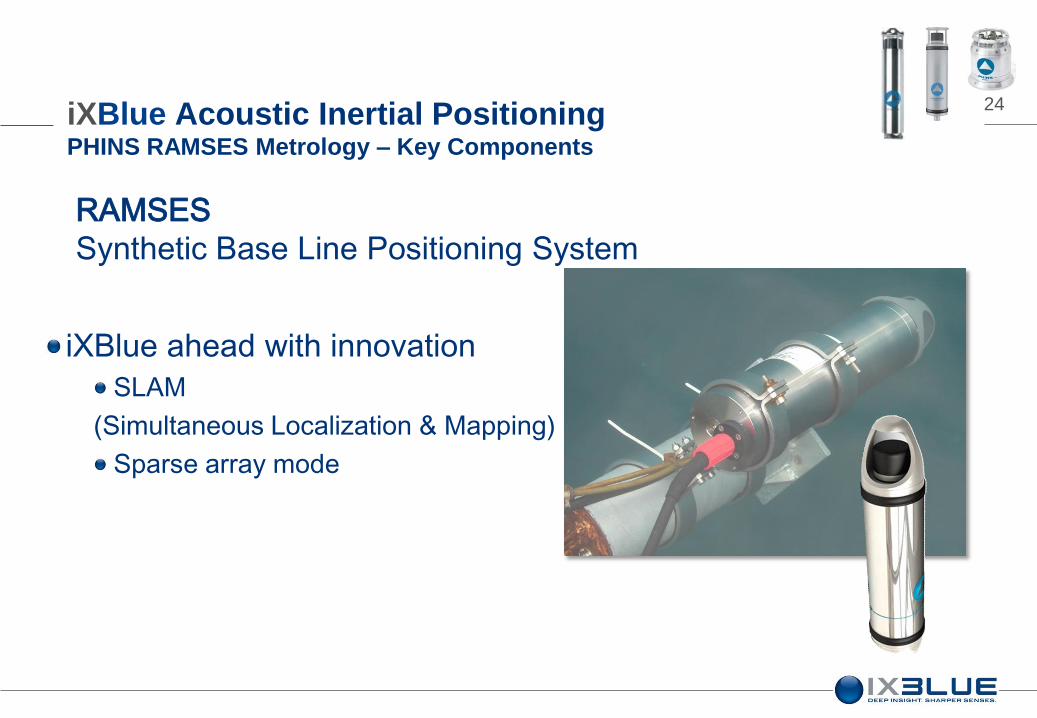
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Key Components
24
RAMSES
Synthetic Base Line Positioning System
iXBlue ahead with innovation
SLAM
(Simultaneous Localization & Mapping)
Sparse array mode
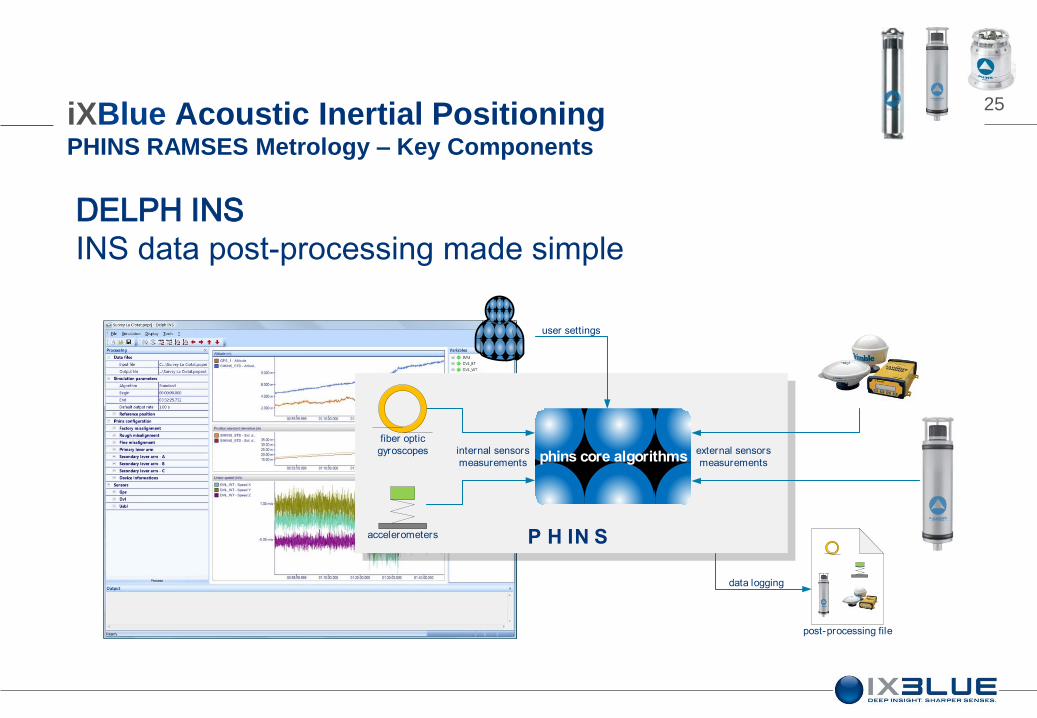
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Key Components
25
DELPH INS
INS data post-processing made simple
P H IN S
phins core algorithms
user settings
internal sensors
measurements
fiber optic
gyroscopes
accelerometers
external sensors
measurements
data logging
post-processing file
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Key Components
26
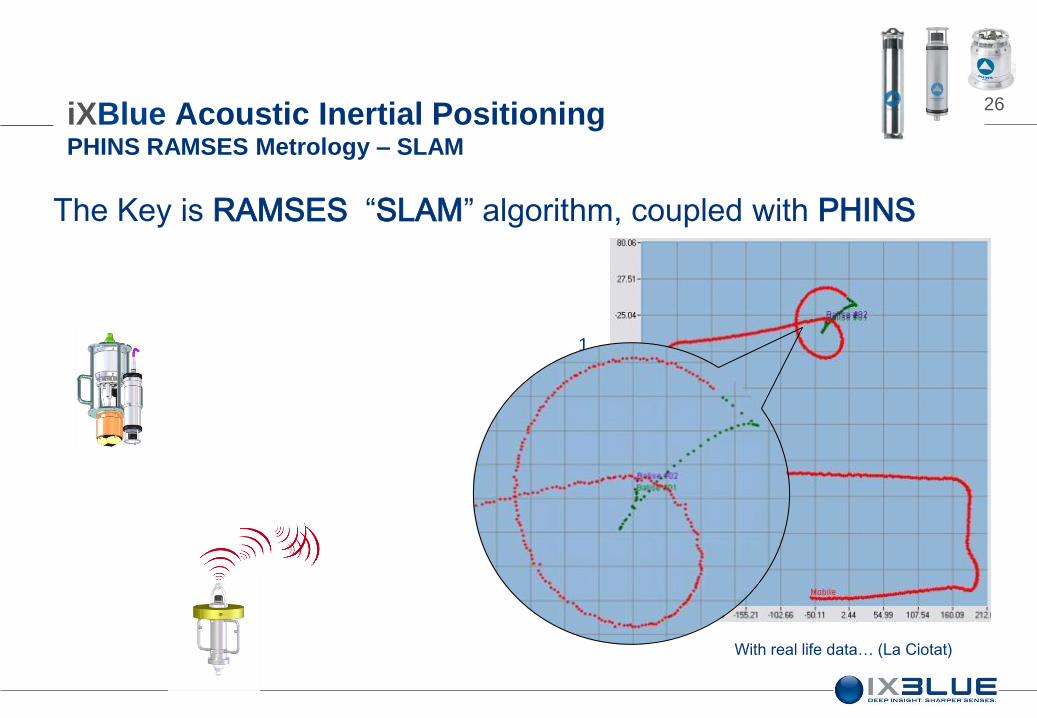
The Key is RAMSES “SLAM” algorithm, coupled with PHINS
1. RAMSES & PHINS tightly coupled
(position, speed)
2. Acoustic range
adjusts beacon’s position
3. Progressively adjust beacon’s position
until final localisation (SLAM)
With real life data… (La Ciotat)
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – SLAM

27
Ready to use pre-integrated
“metrology tool”
Stand alone sub-components on
deployment pole or
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – System
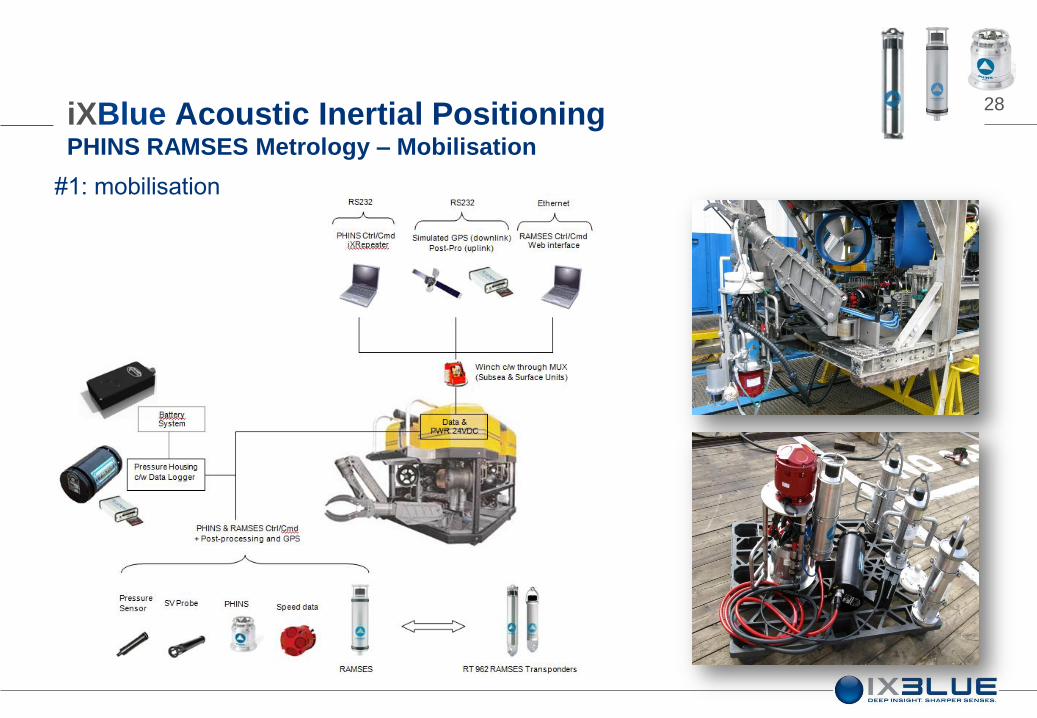
28
#1: mobilisation
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Mobilisation
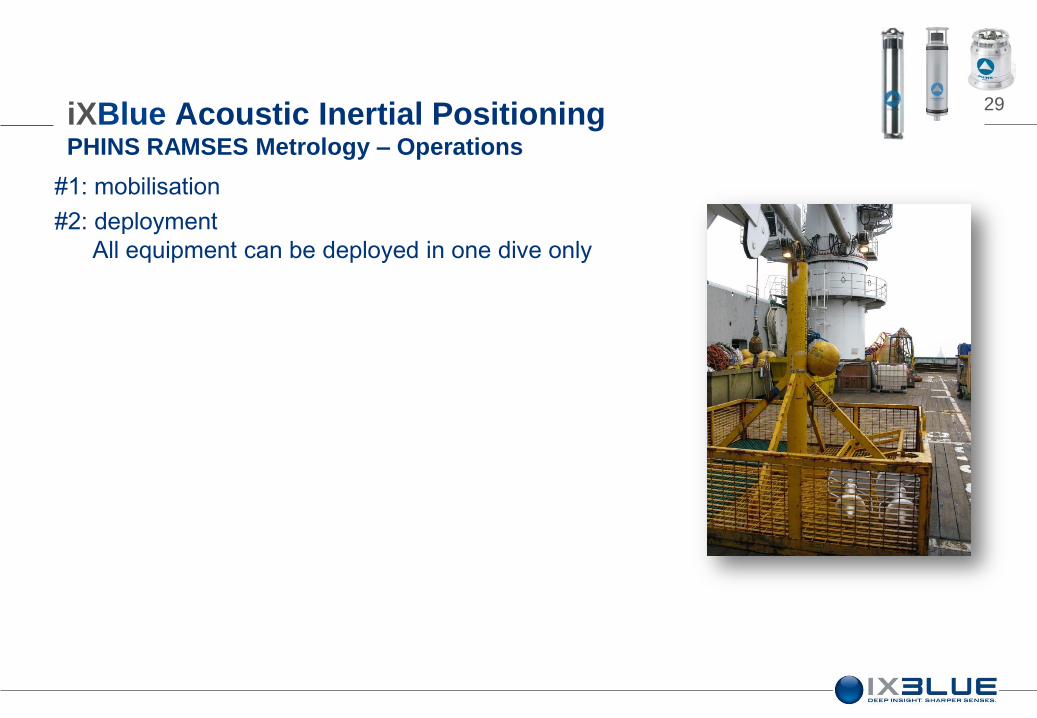
29
#1: mobilisation
#2: deployment
All equipment can be deployed in one dive only
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations

30
#1: mobilization
#2: deployment
All equipment deployed in a single dive
#3: Install one transponder in each connector + 3rd
reference beacon
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations

31
#1: mobilization
#2: deployment
All equipment deployed in a single dive
#3: Install one transponder in each connector + 3rd
reference beacon
#4: proceed to INS alignment (ROV on seabed)
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations
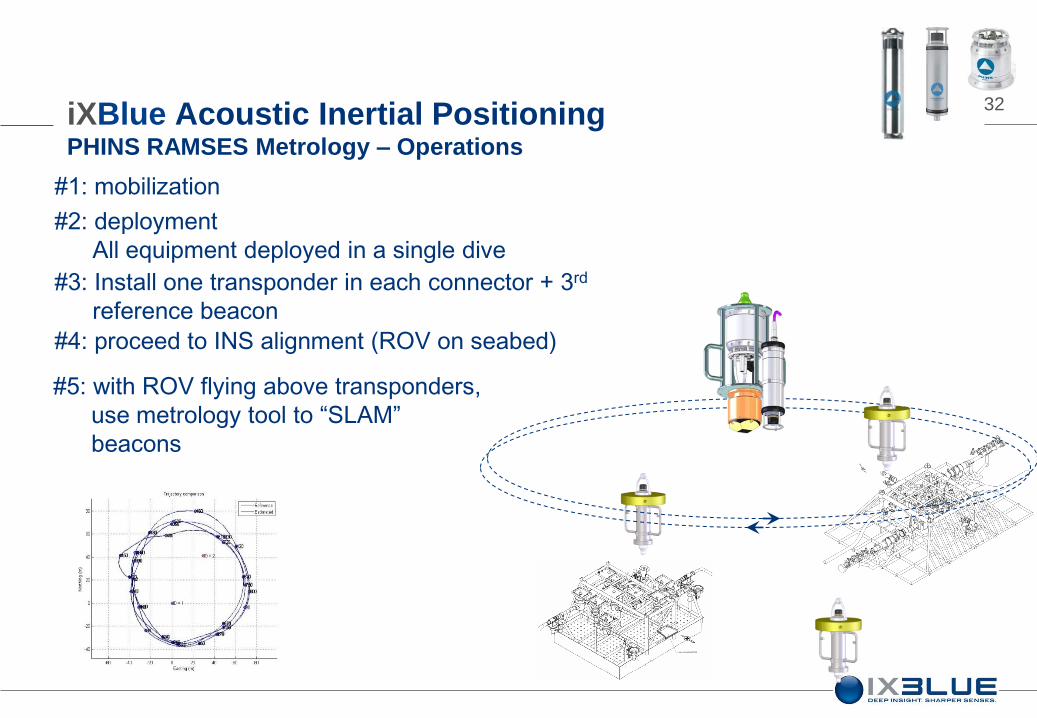
32
#1: mobilization
#2: deployment
All equipment deployed in a single dive
#3: Install one transponder in each connector + 3rd
reference beacon
#4: proceed to INS alignment (ROV on seabed)
#5: with ROV flying above transponders,
use metrology tool to “SLAM”
beacons
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations
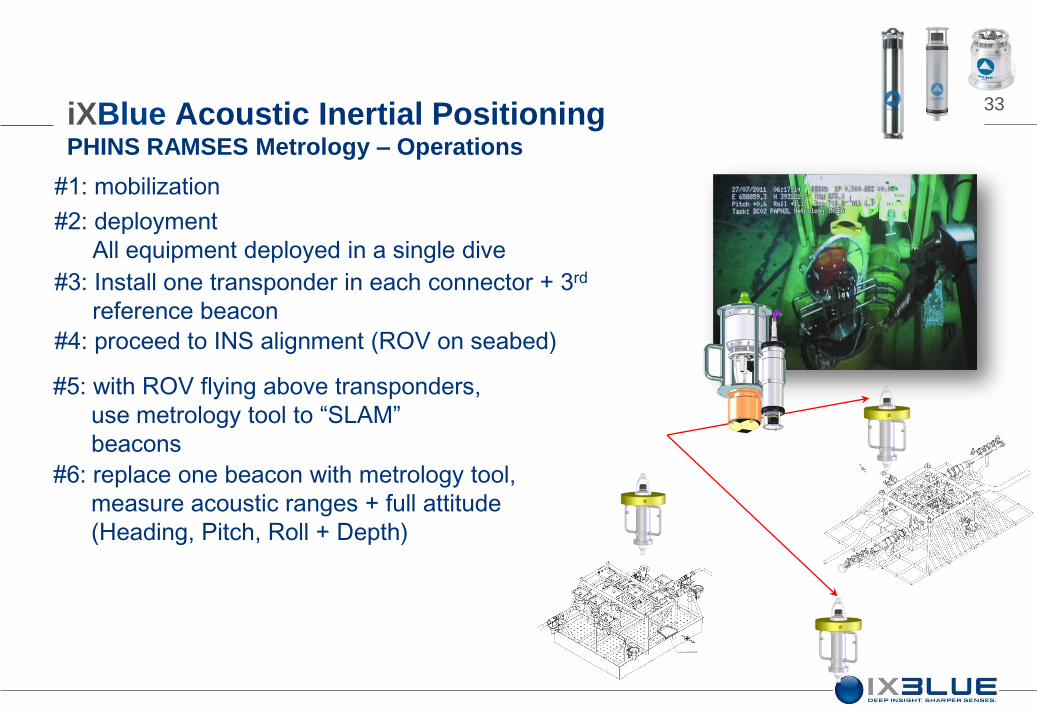
33
#1: mobilization
#2: deployment
All equipment deployed in a single dive
#3: Install one transponder in each connector + 3rd
reference beacon
#4: proceed to INS alignment (ROV on seabed)
#5: with ROV flying above transponders,
use metrology tool to “SLAM”
beacons
#6: replace one beacon with metrology tool,
measure acoustic ranges + full attitude
(Heading, Pitch, Roll + Depth)
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations
34
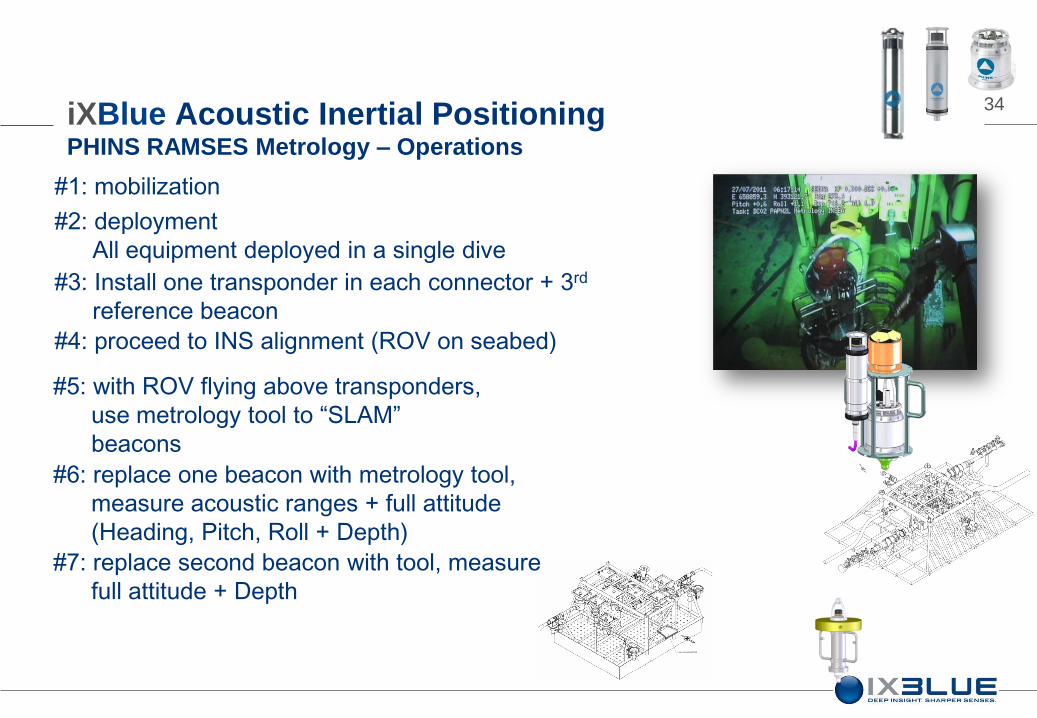
#1: mobilization
#2: deployment
All equipment deployed in a single dive
#3: Install one transponder in each connector + 3rd
reference beacon
#4: proceed to INS alignment (ROV on seabed)
#5: with ROV flying above transponders,
use metrology tool to “SLAM”
beacons
#6: replace one beacon with metrology tool,
measure acoustic ranges + full attitude
(Heading, Pitch, Roll + Depth)
#7: replace second beacon with tool, measure
full attitude + Depth
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations

35
#1: mobilization
#2: deployment
All equipment deployed in a single dive
#3: Install one transponder in each connector + 3rd
reference beacon
#4: proceed to INS alignment (ROV on seabed)
#5: with ROV flying above transponders,
use metrology tool to “SLAM”
beacons
#6: replace one beacon with metrology tool,
measure acoustic ranges + full attitude
(Heading, Pitch, Roll + Depth)
#7: replace second beacon with tool, measure
full attitude + Depth
#8: end of data acquisition, start data processing…..
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Operations
36
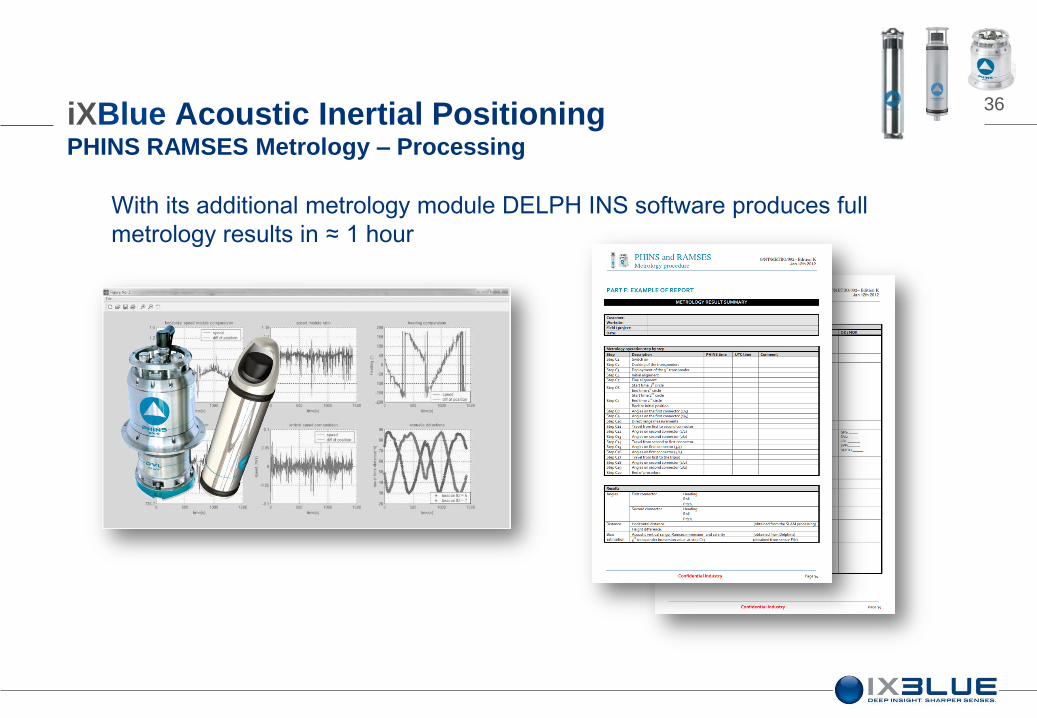
With its additional metrology module DELPH INS software produces full
metrology results in ≈ 1 hour
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Processing

37 iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Results
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.250
10
20
30
40
50
60
70
80
90
100
Distance - m
Balise 1 - Moyenne = 0 m - Ecart type = 0.037 m
Metrology
#1
#2
#3
Slam
37.70
43.88
43.77
#4 57.38
LBL
Method (m)
37.61
43.80
43.80
57.27
Residual
Error (m)
0.09
0.08
0.03
0.11
#5 57.30 57.27 0.03
#6 56.75 56.77 0.02
#7 42.72 42.81 0.09
#8 55.48 55.46 0.02
#9 38.42 38.33 0.09
#10 55.97 56.05 0.08
Average elapsed time for one metrology: 6 hours
Multiple metrologies in one run

38 iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Results
Analysis of the first results showed that the pressure data was not accurate enough
Trial metrology conducted (no third party comparison system, or LBL reference
newer than 2 to 3 months)
Four concurrent processing algorithms used –
Slam 2D
Slam 3D
Pure Acoustic
Direct measurement
18mm spread between the four methods
Third test abandoned due to third party multiplexer failure
Fourth test scheduled

39
Saves time:
☑ 6 hours max from deployment to results
☑ Multiple metrologies at once with the addition of transponder
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Summary
40
metrology
results
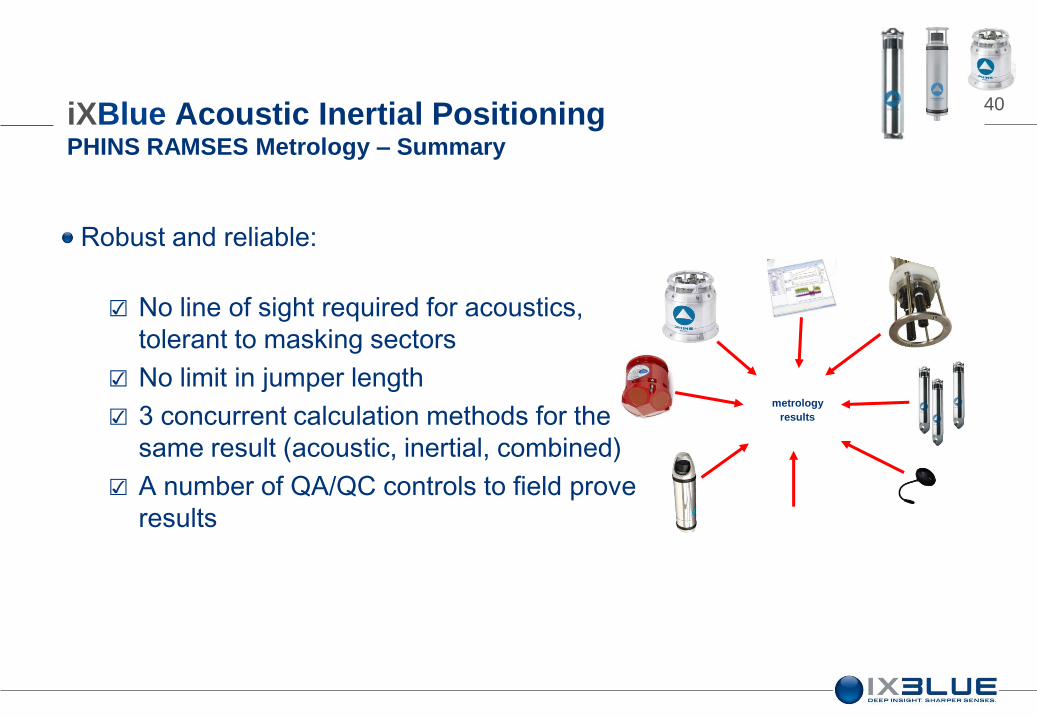
Robust and reliable:
☑ No line of sight required for acoustics,
tolerant to masking sectors
☑ No limit in jumper length
☑ 3 concurrent calculation methods for the
same result (acoustic, inertial, combined)
☑ A number of QA/QC controls to field prove
results
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Summary

41
Simple:
☑ One transponder in each connector + 1 reference, un-calibrated
☑ A ready to use metrology tool
☑ Based on easily exportable PHINS INS (dual use classification)
☑ User friendly DELPH INS post-processing package
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Summary

42
Versatile:
☑ Sub-components (RAMSES, PHINS, Transponders) are stand
alone positioning systems that can be used for other jobs
☑ Any pre-installed PHINS can be re-used for metrology
iXBlue Acoustic Inertial Positioning PHINS RAMSES Metrology – Summary

43 iXBlue Acoustic Inertial Positioning Summary
iXBlue INS operational for over 10 years
We really know INS
iXBlue building blocks interface with each other
And 3rd party sensors and systems
iXBlue INS are self contained systems
No large topside required
Web interface – simplicity
All data available real time on the vehicle
DELPH INS – highly flexible re-processing

44 iXBlue Acoustic Inertial Positioning
ROVINS PHINS GAPS POSIDONIA RAMSES transponders
Any Questions?