
Development of a Series Elastic Actuator and a Distributed Computational Platform · PDF...
78
Development of a Series Elastic Actuator and a Distributed Computational Platform for Robotics Gonçalo Patrício Luís Thesis to obtain the Master of Science Degree in Mechanical Engineering Supervisor: Prof. Jorge Manuel Mateus Martins Examination Committee Chairperson: Prof. João Rogério Caldas Pinto Supervisor: Prof. Jorge Manuel Mateus Martins Member of the Committee: Prof. Carlos Baptista Cardeira November 2015 i
Transcript of Development of a Series Elastic Actuator and a Distributed Computational Platform · PDF...

Development of a Series Elastic Actuator and a DistributedComputational Platform for Robotics
Gonçalo Patrício Luís
Thesis to obtain the Master of Science Degree in
Mechanical Engineering
Supervisor: Prof. Jorge Manuel Mateus Martins
Examination Committee
Chairperson: Prof. João Rogério Caldas PintoSupervisor: Prof. Jorge Manuel Mateus Martins
Member of the Committee: Prof. Carlos Baptista Cardeira
November 2015
i

ii

To my Parents
iii

iv
Acknowledgments
I would like to thank Professor Jorge Martins for believing in my ideas on building a new computational
platform from scratch in detriment of using the old platform. The first task he gave me was to play
arround with the old platform until I felt confortable with it, not all teachers believe in loosing time on
learning things that are supposed to work and should only be used instead of studied. In the end the
freedom he gave me turned into finding gross mistakes in the old platform and ultimately building a new,
more capable one.
I would like to thank Professor Carlos Cardeira for clearing some questions I had about electronics
regarding the circuit board for voltage conversion.
I would also like to thank Professor Paulo Oliveira and Professor Alexandra Moutinho for showing me
the power and beauty of control systems engineering in the lecture I had with them on that topic. Their
practical and clear explanations ultimately made me choose Systems as my Masters area, a choice I
couldn’t be happier about.
I am also deeply grateful to all the other teachers on the systems department and Eng. Camilo for
creating and maintaining a friendly environment during classes and at the laboratory.
I want to thank Sara, for being the best part of my life since we’ve met. Thank you also for being an
always available helping hand, without Sara’s support this project would have been very different.
Last but not least, I want to thank my parents for supporting me in this challenge during the last
years, which is also the biggest investment in my professional and moral education I will have.
Thank You.
v

vi

Resumo
A robotica e uma area extremamente transversal quanto as areas que envolve. Desde a electronica ate
ao controlo e a inteligencia artificial, passando pela mecanica, a robotica e o culminar do melhor que
ha nestas areas. O projecto em que esta tese se insere tem como objectivo explorar e implementar
algoritmos de controlo avancados para controlo de robos bipede, seja para andar, correr, saltar, ou
qualquer outra tarefa, nao so em simulacoes computacionais mas tambem num pequeno robo real.
Esta tese desenvolve a plataforma computacional onde o sistema de controlo sera implementado. A
plataforma desenvolvida usa tecnicas de programacao paralela e distribuida para alcancar a melhor
performance e assim dar mais possibilidades a quem implementar os algoritmos de controlo. Nesta
tese tambem e desenvolvido um actuator elastico em serie para actuacao em forca, baseado num
servo AX-12 Dynamixel da Robotis.
Palavras-chave: Actuador elastico em serie, controlo de forca, plataforma computacional
para robotica, controlo distribuido
vii

viii

Abstract
Robotics embraces a wide spectrum of engineering areas. From electronics to control and artificial
intelligence, passing through mechanics, robotics is the culmination of what is best on those areas. The
project this thesis develops has as main goal the exploration and implementation of advanced control
algorithms for making humanoid robots walk, run, jump or complete any other task not only in computer
simulations but also on a small real humanoid robot. This thesis develops a computational platform
where the control systems will be implemented. The developed platform uses parallel and distributed
programming techniques to achieve the best performance and thus provide more possibilities to whom
will implement the said controllers. In this thesis a series elastic actuator is also developed based on an
AX-12 Dynamixel servo from Robotis.
Keywords: Series elastic actuator, force control, robotics computational platform, distributed
control
ix

x
Contents
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvi
Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 State-of-the-art . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Robot Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4 Outline of this thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Previous Hardware and Low Level Software 5
2.1 Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Problems with the old platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 New platform for High Level Control . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.3 Actuator Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.4 Communication Between the Odroid and the AX-12’s . . . . . . . . . . . . . . . . 13
2.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 Problems with the old software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.2 Linux UART Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.3 Pipelined Distributed High Level Controller Software . . . . . . . . . . . . . . . . . 19
2.2.4 Low Level Actuator Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.5 System Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 Force Actuator 28
3.1 Introduction to Force Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.1.1 Adding Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Series Elastic Actuators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
xi
3.2.2 Open Loop Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2.3 Motor and Gearbox Mathematical Model . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2.4 Closed Loop: Constrained Position . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2.5 Closed Loop: Inertial Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.6 Analysis with the real motor & hardware . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.7 Digital control system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.8 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3 Servo Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4 Conclusions 55
4.1 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Bibliography 58
A Work done on the previous platform 59
B Technical Drawing of the new shaft 60
xii
List of Tables
2.1 Comparison of the top 10 boards on the Linux.com and LinuxGizmos.com survey . . . . . 9
2.2 ATMega8(A) Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
xiii

xiv
List of Figures
1.1 Robotis Bioloid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Previous robot infrastructure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 The top 10 Linux and Android SBCs in 2015, according to a Linux.com and LinuxGiz-
mos.com reader survey . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Odroid U3 and its Wi-fi dongle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 The Murata SV01A103 potentiometer used on the AX-12 Dynamixel servos . . . . . . . . 10
2.5 Controller schematic of the AX-12 Dynamixel servos . . . . . . . . . . . . . . . . . . . . . 12
2.6 Quad-buffer/line driver functional diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.7 Real IC wiring diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.8 Voltage converter wiring diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.9 Sparkfun bi-directional logic level converter . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.10 Quad-buffer/line driver and voltage level converter for the Odroid . . . . . . . . . . . . . . 15
2.11 Communication flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.12 Morpheus protocol message . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.13 Control function of the morpheus firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.14 Odroid CPUs and communication ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.15 ATMega communication ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.16 High level controller scheduling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.17 Read and send processes overlap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.18 High level controller tasks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.19 Tasks in serial(2 time-steps) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.20 Tasks in pipeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.21 Low level controller scheduling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.22 Multiple servo scheduling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.23 Final system scheduling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1 Long and tight vs short and loose gearboxes . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2 Disassembled AX-12 Dynamixel gearbox . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3 Ideal actuator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4 Regular actuator schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
xv
3.5 Force control using a high impedance force sensor . . . . . . . . . . . . . . . . . . . . . . 31
3.6 Series elastic actuator schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.7 Open loop block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.8 Open loop block diagram with inertial load . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.9 Validation results of the dynamixel identification by Tiago Rato . . . . . . . . . . . . . . . 33
3.10 Series elastic actuator schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.11 Impedance transfer function bode diagram. [blue:K = 1 and Kp = 1 . . . . . . . . . . . . 35
3.12 Comparison of different amplitude sine waves . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.13 Frequency vs amplitude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.14 Position control block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.15 Trade off when selecting spring stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.16 Force control block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.17 Comparison of saturated vs non-saturated actuators due to different spring stiffness . . . 41
3.18 Control action of saturated vs non-saturated actuators due to different spring stiffness . . 42
3.19 Position control block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.20 Comparison of soft and stiff springs in position tracking . . . . . . . . . . . . . . . . . . . 43
3.21 Frequency response of soft and stiff springs in position tracking . . . . . . . . . . . . . . . 43
3.22 Comparison of output impedance response of systems with different spring stiffness . . . 44
3.23 Input used to compare output impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.24 Output impedance block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.25 Comparison of the forces generated on impact of systems with different spring stiffnesses 45
3.26 Impact tolerance block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.27 Impact tolerance simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.28 Dynamixel servo with the elastic element on the outside . . . . . . . . . . . . . . . . . . . 47
3.29 Inside the AX-12 Dynamixel servo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.30 Modified axle fitted with conductive foam . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.31 Wire installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.32 AX-12 with an elastic shaft and position sensor . . . . . . . . . . . . . . . . . . . . . . . . 50
3.33 Parts of the prototype shaft with position sensor . . . . . . . . . . . . . . . . . . . . . . . . 51
3.34 Assembled prototype shaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.35 FEM analysis of the production shaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
A.1 Modified windows program to work with force control . . . . . . . . . . . . . . . . . . . . . 59
xvi
Chapter 1
Introduction
Every day in current times we face our selfs with technology, technology that is/was mainly created
not by the work of a single man or result of a single idea, but by stacking up decades of ideas and
solutions, each that make everything do something more or work a bit better. Those ideas and solutions
may come by from need, curiosity, or even by accident, but they most certainly will contribute latter to
make something bigger, different, or avoid catastrophic mistakes. Weather we build something useful or
learn something unknown before, we can thank our seemingly infinite curiosity for evolution. The natural
human urge to show every other man the success of our experiments is at the heart of knowledge
passing through times. Science can be seen as the biggest system that will ever exist.
Robotics is a culmination of this system, and by itself it relates disciplines all the way from electronics,
math and computation to mechanics, physics and control. This thesis is just another try at giving another
step towards better technology and ultimately a better society.
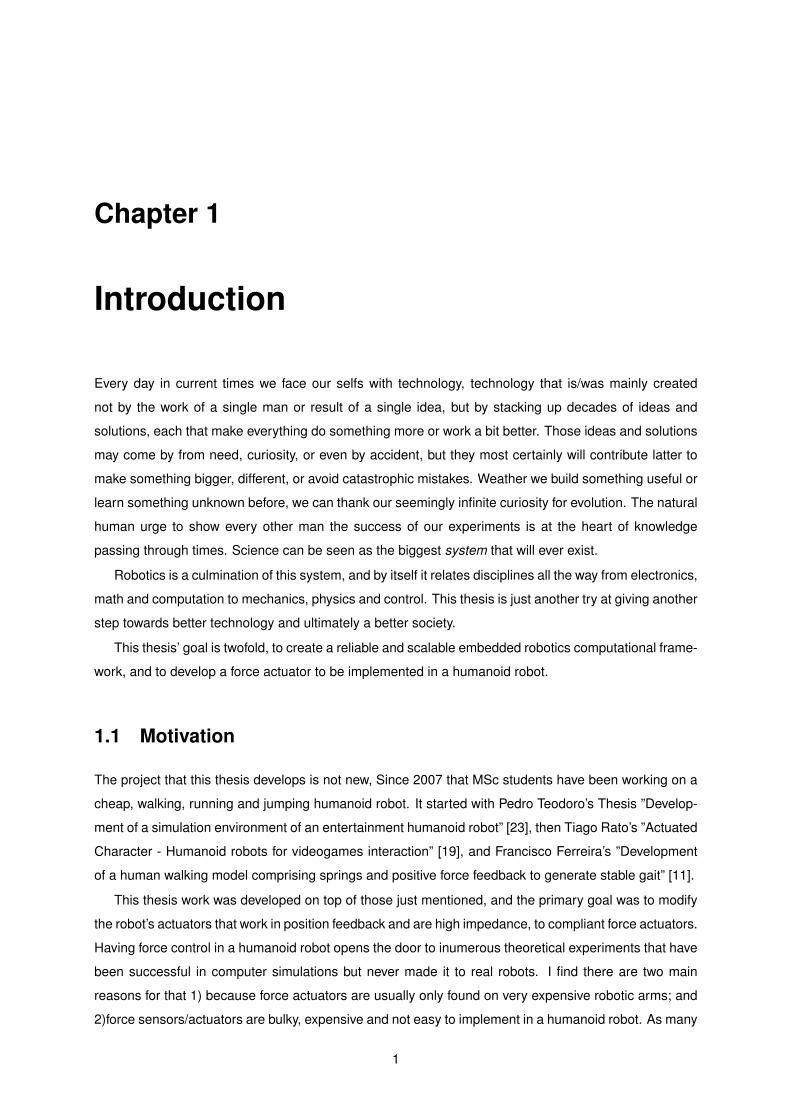
This thesis’ goal is twofold, to create a reliable and scalable embedded robotics computational frame-
work, and to develop a force actuator to be implemented in a humanoid robot.
1.1 Motivation
The project that this thesis develops is not new, Since 2007 that MSc students have been working on a
cheap, walking, running and jumping humanoid robot. It started with Pedro Teodoro’s Thesis ”Develop-
ment of a simulation environment of an entertainment humanoid robot” [23], then Tiago Rato’s ”Actuated
Character - Humanoid robots for videogames interaction” [19], and Francisco Ferreira’s ”Development
of a human walking model comprising springs and positive force feedback to generate stable gait” [11].
This thesis work was developed on top of those just mentioned, and the primary goal was to modify
the robot’s actuators that work in position feedback and are high impedance, to compliant force actuators.
Having force control in a humanoid robot opens the door to inumerous theoretical experiments that have
been successful in computer simulations but never made it to real robots. I find there are two main
reasons for that 1) because force actuators are usually only found on very expensive robotic arms; and
2)force sensors/actuators are bulky, expensive and not easy to implement in a humanoid robot. As many
1

articles verify [17] [7] [13] [4] [12], force control is the ultimate way to control a robot that walks, interacts
with humans, or handles delicate environments.
The need for new computational hardware exists because newer platforms allow more computational
speed, faster communication between boards, and better compatibility with new harware and operating
systems, which results in a broader range of control systems that can be implemented. For instance,
if we want to control the heel strike to toe strike movement of a humanoid robot via a feedback control
system, the sample time needs to be in the order of 2ms for a human sized robot. This wasn’t imaginable
with the previous hardware architecture but is very close reality with the new hardware. The low level
software had to be re-done because there were issues in the previous version, it had serious time
keeping problems and the code was generaly written in a way that is far from optimal for control systems.
1.2 State-of-the-art
In today’s robotics it’s undeniable that Petman, Bigdog and Cheetah from Boston Dynamics are probably
the most advanced robots in terms of physical capabilities. Walking, running and jumping were once
dominated by robots like Asimo from Honda that relied on position controlled actuators, today those
tasks are finely performed on the aforementioned robots with force controlled actuators in a much more
natural and robust way. The robot walking algorithms are evolving fast and there is an unprecedented
need for force actuators to test these algorithms in real robots.
The technology of electric position actuators has benefit from decades of use in the industry, home
apliances, cars, disk drives or even toys, they are widely available and there’s now almost a standard on
how to build good position actuators. While this is true for position actuators, force actuators aren’t new
but their small application spectrum has stopped them from evolving as much has position actuators.
There are several methods to build a force actuator but none has become a standard whether because
of the price or because the different methods offer very different specifications. For the MIT Cheetah, a
new force actuator was developed [5], it has low impedance and allows torque estimation by measuring
the current drawn by the motor. While this actuator offers very good specifications, it’s not possible to
implement on the robot of this thesis because of its size.
Series elastic actuators aren’t new and while there were many articles written on them, the need
for force control in robots is pushing scientists and engineers to analyse this form of force actuator
further, and numerous articles have been written on them on the last 5 years. These articles analyse
their compliance, optimizing their performance, controller stability, spring selection, and other topics and
promising results have been shown. This type of actuator can be built inexpensively and very compact,
which is why it was selected for this thesis.
1.3 Robot Platform
The robot used on this thesis is the Robotis Bioloid. This robot is a very good platform for universities
to implement and test new algorithms because it’s inexpensive compared to other solutions and offers
2

decent performance. It’s a humanoid robot with 18 degrees of freedom powered by Dynamixel AX-12
servo motors.
Figure 1.1: Robotis Bioloid
1.4 Outline of this thesis
This thesis is structured in the following way.
Chapter 2 addresses the hardware and software problems of the previous computational platform
and describes the new platform.
In chapter 3 series elastic actuators are analysed, mathematical models are developed, and conclu-
sions are made about the selection of the spring stiffness for the Dynamixel SEA modification. Several
application tentatives are described and analysed and a final production axle is presented.
In chapter 4 conclusions are presented and suggestions for future work and continuation of the
project are given.
3

4
Chapter 2
Previous Hardware and Low Level
Software
2.1 Hardware
Originally the Bioloid’s control system runs on a controller board called CM5 that comes with the robot,
and on the Dynamixel servos. While the ATMega 8’s on the servos’ chips are more than capable of
running the requested tasks of a low level controller (usually a PID type controller), the CM5 has an
ATMega 128 which can easily become the bottleneck of projects like this. The reasons range from the
poor calculation capability when compared to a full ARM or x86 processor, which can become a problem
if later we need to implement a very complex control system (e.g. an adaptive neural network controller
coupled with computer vision algorithms), to the cumbersome and time consuming tasks needed to get
updated code in the MCU vs compiling directly under Linux, for instance. Another advantage of having
a processor running an OS, instead of an MCU, is the ability to easily log on to the robot’s computer via
wi-fi and be able to monitor and/or control the robot’s tasks directly ”as superuser”.
In this section, the motivations to aquire a new embedded computer platform are discussed, the
new platform is presented as well as the microcontroller present on the Dynamixel servos. These two
platforms’ UART ports work at different voltage levels and only one wire is used to send and receive data
on the servo’s MCU, the hardware solution is also presented.
2.1.1 Problems with the old platform
To be able to develop the control system from Matlab, in 2010 an embedded computer was implemented,
it was a Roboard. The original idea was to implement the Roboard as a standalone high level control
platform that communicated directly with the servos exchanging new control actions with sensor values,
but problems maintaining a fixed sample time appeared. The problem was that the linux version sup-
ported by the Roboard is very dated and doesn’t have good support for real-time tasks (if any), running
deterministic tasks in linux was in it’s infancy by that versions’ year, and altough a few scripts to fix this
5
existed, none of them was a trustworthy option to serve as the main clock for the robot’s control system.
Basically what those pieces of software do is make the control program the highest priority task in the
system, but the kernel itself typically isn’t preemptible in linux systems (only if RT Patch or Xenomai are
used), and kernel tasks may take up to more than 10ms [3], a latency value that is unaceptable in cer-
tain moments of the walking gait for instance. The team that implemented the Roboard also found out
that the system wasn’t capable of real-time because they had problems with the communication, they
were using an FTDI chip to make the conversion from the USB port of the Roboart to the servo’s UART
protocol. The problem is that all FTDI chips have a lantency associated with the conversion from one
protocol to the other of arround 1ms for each byte. The following quote from an official FTDI application
note [1] is put explicitly here to emphasize and clarify the issue:
”USB data transfer is prone to delays that do not normally appear in systems that have
been used to transferring data using interrupts. The original COM ports of a PC were directly
connected to the motherboard and were interrupt driven. When a character was transmitted
or received (depending if FIFO’s are used) the CPU would be interrupted and go to a routine
to handle the data. This meant that a user could be reasonably certain that, given a particular
baud rate and data rate, the transfer of data could be achieved without any real need for flow
control. The hardware interrupt ensured that the request would get serviced. Therefore data
could be transferred without using handshaking and still arrive into the PC without data loss.
USB does not transfer data using interrupts. It uses a scheduled system and as a result,
there can be periods when the USB request does not get scheduled and, if handshaking
is not used, data loss will occur. An example of scheduling delays can be seen if an open
application is dragged around using the mouse. For a USB device, data transfer is done in
packets. If data is to be sent from the PC, then a packet of data is built up by the device
driver and sent to the USB scheduler. This scheduler puts the request onto the list of tasks
for the USB host controller to perform. This will typically take at least 1 millisecond to execute
because it will not pick up the new request until the next ’USB Frame’ (the frame period is 1
millisecond). Therefore there is a sizable overhead (depending on your required throughput)
associated with moving the data from the application to the USB device. If data were sent ’a
byte at a time’ by an application, this would severely limit the overall throughput of the system
as a whole.”
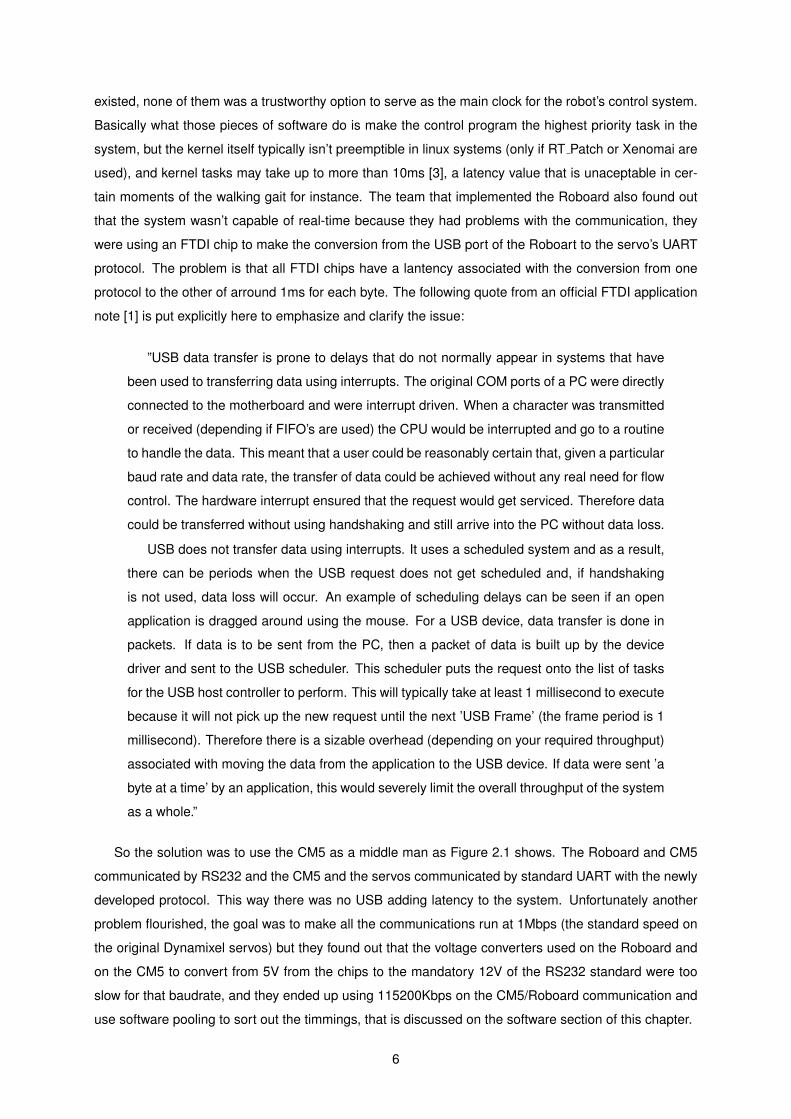
So the solution was to use the CM5 as a middle man as Figure 2.1 shows. The Roboard and CM5
communicated by RS232 and the CM5 and the servos communicated by standard UART with the newly
developed protocol. This way there was no USB adding latency to the system. Unfortunately another
problem flourished, the goal was to make all the communications run at 1Mbps (the standard speed on
the original Dynamixel servos) but they found out that the voltage converters used on the Roboard and
on the CM5 to convert from 5V from the chips to the mandatory 12V of the RS232 standard were too
slow for that baudrate, and they ended up using 115200Kbps on the CM5/Roboard communication and
use software pooling to sort out the timmings, that is discussed on the software section of this chapter.
6
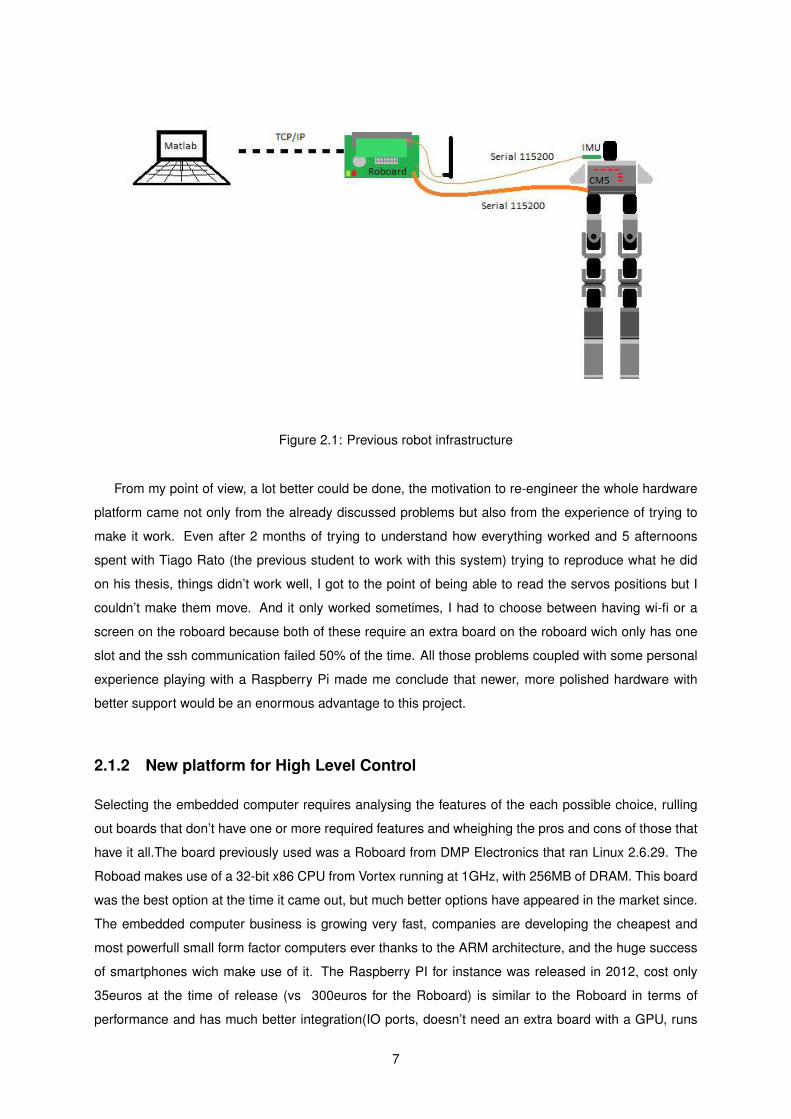
Figure 2.1: Previous robot infrastructure
From my point of view, a lot better could be done, the motivation to re-engineer the whole hardware
platform came not only from the already discussed problems but also from the experience of trying to
make it work. Even after 2 months of trying to understand how everything worked and 5 afternoons
spent with Tiago Rato (the previous student to work with this system) trying to reproduce what he did
on his thesis, things didn’t work well, I got to the point of being able to read the servos positions but I
couldn’t make them move. And it only worked sometimes, I had to choose between having wi-fi or a
screen on the roboard because both of these require an extra board on the roboard wich only has one
slot and the ssh communication failed 50% of the time. All those problems coupled with some personal
experience playing with a Raspberry Pi made me conclude that newer, more polished hardware with
better support would be an enormous advantage to this project.
2.1.2 New platform for High Level Control
Selecting the embedded computer requires analysing the features of the each possible choice, rulling
out boards that don’t have one or more required features and wheighing the pros and cons of those that
have it all.The board previously used was a Roboard from DMP Electronics that ran Linux 2.6.29. The
Roboad makes use of a 32-bit x86 CPU from Vortex running at 1GHz, with 256MB of DRAM. This board
was the best option at the time it came out, but much better options have appeared in the market since.
The embedded computer business is growing very fast, companies are developing the cheapest and
most powerfull small form factor computers ever thanks to the ARM architecture, and the huge success
of smartphones wich make use of it. The Raspberry PI for instance was released in 2012, cost only
35euros at the time of release (vs 300euros for the Roboard) is similar to the Roboard in terms of
performance and has much better integration(IO ports, doesn’t need an extra board with a GPU, runs
7

from a usb cable, etc). The Raspberry Pi became a standard thanks to the electronics hobyist market
(or maker market), and other companies followed the model and improved the concept.
From the enormous amout of possibilities, choosing a the best board is not easy, specially taking
into account that all these products are development boards without much support and advertized as
non finished products. The problem with this is that we can’t trust a board maker simply because they
sell the one with best features, because if there aren’t any serial port drivers we can’t do anything with
it on this project. So the ”trick” is to select the board with best features from the most popular boards.
The mandatory feature was to have support for high speed UART communication (more than 1Mbps) to
allow direct communication with the servos thus removing the need for the CM5. The selected platform
was the Odroid U3 from Hardkernel. It makes use of a Samsung Exynos 4412, a quad-core ARM SOC
running at 1.7GHz that costs around 60 euros. The platform was selected in May 2014, figure 2.2 is the
result of a survey released by Linux.com and LinuxGizmos.com in june 2015 on open spec single board
computers [6]. As can be seen, the Odroid U3 is made it to the top 10 so the Odroid is a popular board
in a universe of 53 boards, as sugested the popularity and comunity activity of the board in the SOC (or
SBC) market is very important to have decent support available. Table 2.1 shows a comparison of the
features of the top 10 boards on the survey. The second column indicates if the board was available
in the market at the time the Odroid U3 was bought. The Odroid U3 is clearly the winner in terms of
features from the available boards, and still competes with the majority of latter boards.
Since this is a research project and students from this department are more familiar with Matlab than
any other language or developing environment, having hardware that is supported by Matlab is a big
bonus. The Raspberry Pi was supported to some extent by Matlab, and some tests were done with it
but Matlab lacked communication through the UART support, that together with the slow communication
speeds put the Raspberry Pi B+ behind the Odroid U3.
Figure 2.2: Points for each board at the top 10 Linux and Android SBCs in 2015, according to aLinux.com and LinuxGizmos.com reader survey.
8
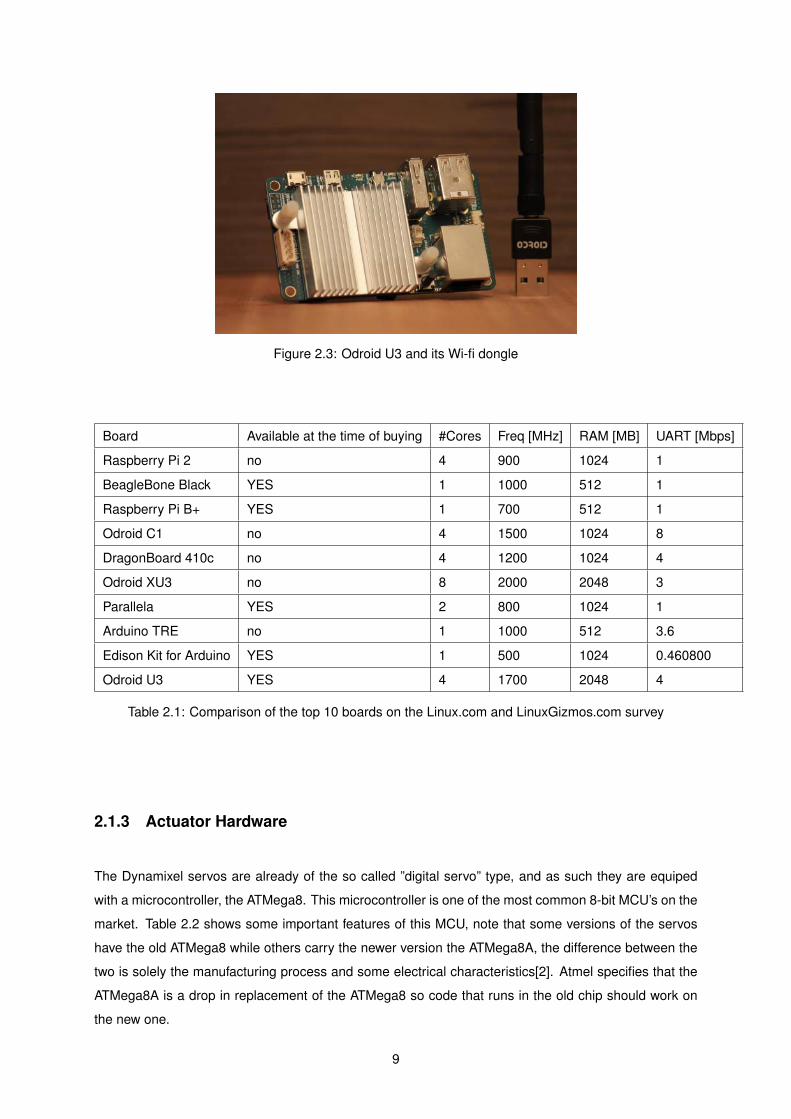
Figure 2.3: Odroid U3 and its Wi-fi dongle
Board Available at the time of buying #Cores Freq [MHz] RAM [MB] UART [Mbps]
Raspberry Pi 2 no 4 900 1024 1
BeagleBone Black YES 1 1000 512 1
Raspberry Pi B+ YES 1 700 512 1
Odroid C1 no 4 1500 1024 8
DragonBoard 410c no 4 1200 1024 4
Odroid XU3 no 8 2000 2048 3
Parallela YES 2 800 1024 1
Arduino TRE no 1 1000 512 3.6
Edison Kit for Arduino YES 1 500 1024 0.460800
Odroid U3 YES 4 1700 2048 4
Table 2.1: Comparison of the top 10 boards on the Linux.com and LinuxGizmos.com survey
2.1.3 Actuator Hardware
The Dynamixel servos are already of the so called ”digital servo” type, and as such they are equiped
with a microcontroller, the ATMega8. This microcontroller is one of the most common 8-bit MCU’s on the
market. Table 2.2 shows some important features of this MCU, note that some versions of the servos
have the old ATMega8 while others carry the newer version the ATMega8A, the difference between the
two is solely the manufacturing process and some electrical characteristics[2]. Atmel specifies that the
ATMega8A is a drop in replacement of the ATMega8 so code that runs in the old chip should work on
the new one.
9

ATMEGA8
CPU Freq. 16MHz - -
Memory
Flash 8KB -
SRAM 1KB -
EEPROM 512B -
Interfaces
SPI 4 MHz1 1 Ch
I2C 400 kHz 1 Ch
UART 2 Mbps 1 Ch
Analog ADC 10 bit 8 Ch
Table 2.2: ATMega8(A) Specifications
To make a series elastic actuator we need to have two position sensors, one on each side of the
elastic member on the shaft. As Figure 2.5 shows, the dynamixels use pin 23(ADC0) to read the value
of the position for feedback control. The sensor used is the analog potentiometer in figure 2.4. The
schematic on the AX-12’s allowed us to connect a second sensor in pin 24, the second sensor was
taken from a burned donor servo. Originally the idea was to use the AX-12’s as guinea pig to study the
implementation possibilities and then implement the force actuation on better servos from the Dynamixel
MX line, there are advantages in that across the board, they’re faster, stronger and more precise. Al-
though time didn’t allow for that, the second sensor to be implemented on those servos was chosen to
be an iC-MU from IC Haus. Using a sensor from a donor MX servo isn’t possible because they use
top mounted encoders instead of hollow shaft potentiometers. The implementation of this sensor would
be more complex because a PCB had to be developed and the communication protocol between the
ATMega and the enconder chip would have to be taken care of.
Figure 2.4: The Murata SV01A103 potentiometer used on the AX-12 Dynamixel servos
Note that the potentiometer used on the AX-12 servos is only capable of reading 300 degrees of
rotation, so when implementing the second sensor care has to be taken to avoid increasing the force
sensing deadzone by intersecting the deadzone of one sensor with the sensible zone of the other, in
other words the potentiometers should be aligned.
Altough the ATMega8 has a regular UART port with TX and RX lines, those aren’t readily available
on the servo connector. In the bottom of the servo schematic in figure 2.5 we see that the TX and RX
lines are connected to a 3 state quad buffer/line driver (the 74HC126D), wich then connects to the servo
1When the ATMega8 is running at 16MHz
10
connectors. In the connectors only 3 lines are available: power, ground, and communication. The line
driver acts as a ’Y’ and the RX/TX selection is done by two lines connected to the ATMega on pins 10
and 11. Switching the state of these lines makes the line driver put the data being received from the
outside on the RX pin of the ATMega, or sending out what the ATMega is putting on the TX line, both
can’t happen at the same time and this has to be taken care of on software. This chip is needed on
these servos to allow for the daisy chain communication have a large number of servos connected to
one another without loosing signal quality. Because of this the Odroid also needed a chip that acted as
a ’Y’ to connect the only communication wire comming from the servos to the TX and RX lines on the
Odroid, the solution is presented on a latter section. Note that although these chips are fast enough
to transmit data at 1Mbps, it takes some time to switch between the sending and receiving states and
some time is lost here on the whole cycle of each sample time step.
The ideal would be to have not only the UART port available on the servo connector, but also the
SPI port. This way a much quicker full-duplex communication scheme could be implemented, this is
discussed on the software section of this chapter.
11

Figure 2.5: Controller schematic of the AX-12 Dynamixel servos
12
1A
2A
3A
4A
1OE
2OE
3OE
4OE
1Y
2Y
3Y
4Y
RX EN
TX
TX EN
RX
47R
To Dynamixel bus
Figure 2.6: Quad-buffer/line driver functional diagram
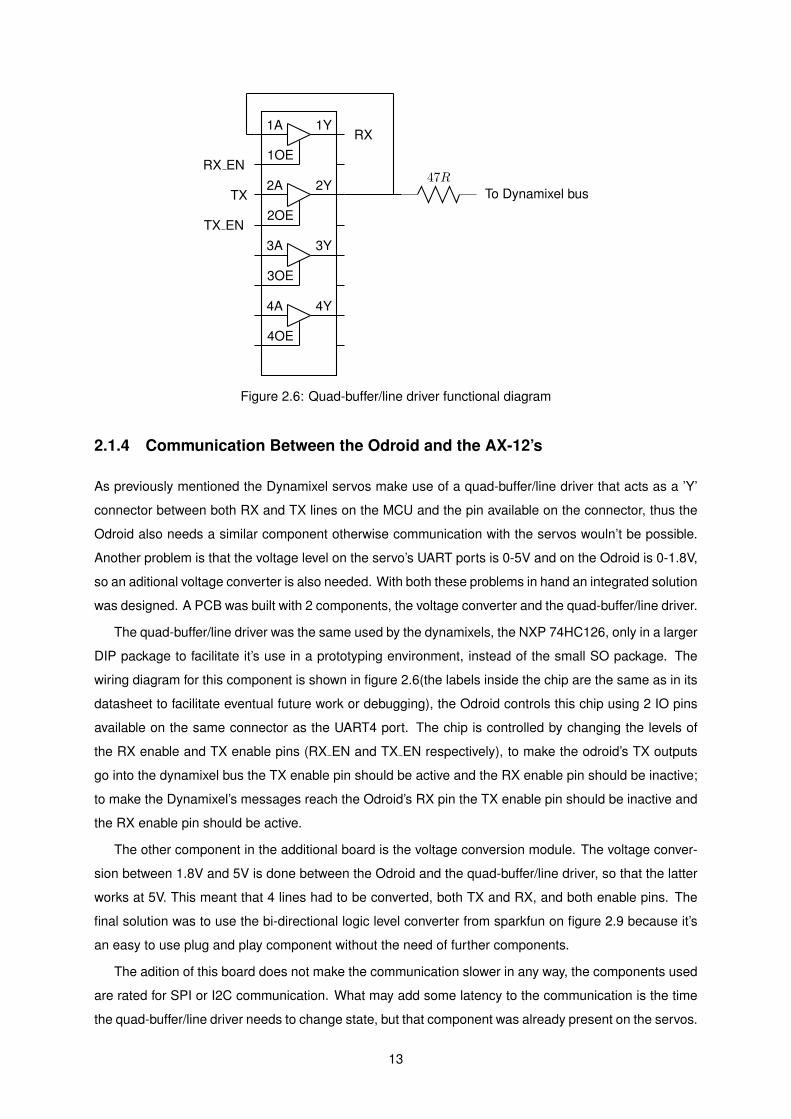
2.1.4 Communication Between the Odroid and the AX-12’s
As previously mentioned the Dynamixel servos make use of a quad-buffer/line driver that acts as a ’Y’
connector between both RX and TX lines on the MCU and the pin available on the connector, thus the
Odroid also needs a similar component otherwise communication with the servos wouln’t be possible.
Another problem is that the voltage level on the servo’s UART ports is 0-5V and on the Odroid is 0-1.8V,
so an aditional voltage converter is also needed. With both these problems in hand an integrated solution
was designed. A PCB was built with 2 components, the voltage converter and the quad-buffer/line driver.
The quad-buffer/line driver was the same used by the dynamixels, the NXP 74HC126, only in a larger
DIP package to facilitate it’s use in a prototyping environment, instead of the small SO package. The
wiring diagram for this component is shown in figure 2.6(the labels inside the chip are the same as in its
datasheet to facilitate eventual future work or debugging), the Odroid controls this chip using 2 IO pins
available on the same connector as the UART4 port. The chip is controlled by changing the levels of
the RX enable and TX enable pins (RX EN and TX EN respectively), to make the odroid’s TX outputs
go into the dynamixel bus the TX enable pin should be active and the RX enable pin should be inactive;
to make the Dynamixel’s messages reach the Odroid’s RX pin the TX enable pin should be inactive and
the RX enable pin should be active.
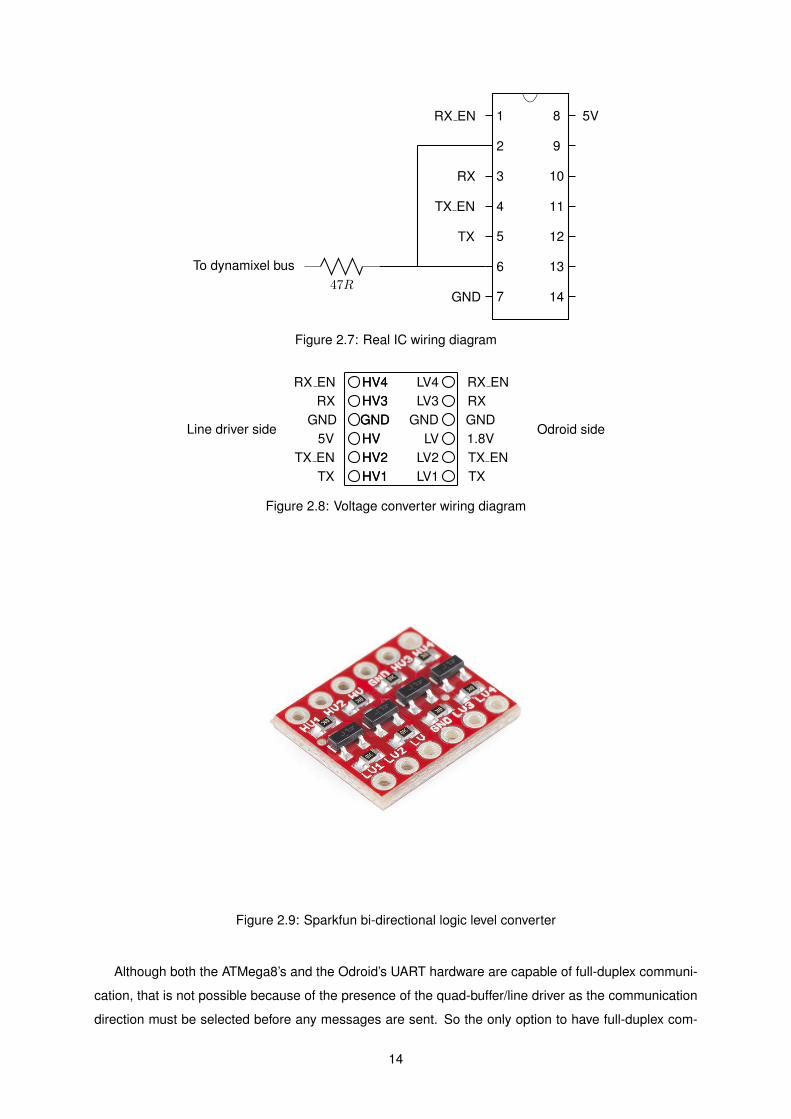
The other component in the additional board is the voltage conversion module. The voltage conver-
sion between 1.8V and 5V is done between the Odroid and the quad-buffer/line driver, so that the latter
works at 5V. This meant that 4 lines had to be converted, both TX and RX, and both enable pins. The
final solution was to use the bi-directional logic level converter from sparkfun on figure 2.9 because it’s
an easy to use plug and play component without the need of further components.
The adition of this board does not make the communication slower in any way, the components used
are rated for SPI or I2C communication. What may add some latency to the communication is the time
the quad-buffer/line driver needs to change state, but that component was already present on the servos.
13
RX EN
RX
TX EN
TX
GND
5V
47R
To dynamixel bus
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Figure 2.7: Real IC wiring diagram
HV1HV2HVGNDHV3HV4
LV1LV2
LVGND
LV3LV4
HV1HV2HVGNDHV3HV4
TXTX EN1.8VGNDRXRX EN
TXTX EN
5VGND
RXRX EN
Odroid sideLine driver side
Figure 2.8: Voltage converter wiring diagram
Figure 2.9: Sparkfun bi-directional logic level converter
Although both the ATMega8’s and the Odroid’s UART hardware are capable of full-duplex communi-
cation, that is not possible because of the presence of the quad-buffer/line driver as the communication
direction must be selected before any messages are sent. So the only option to have full-duplex com-
14
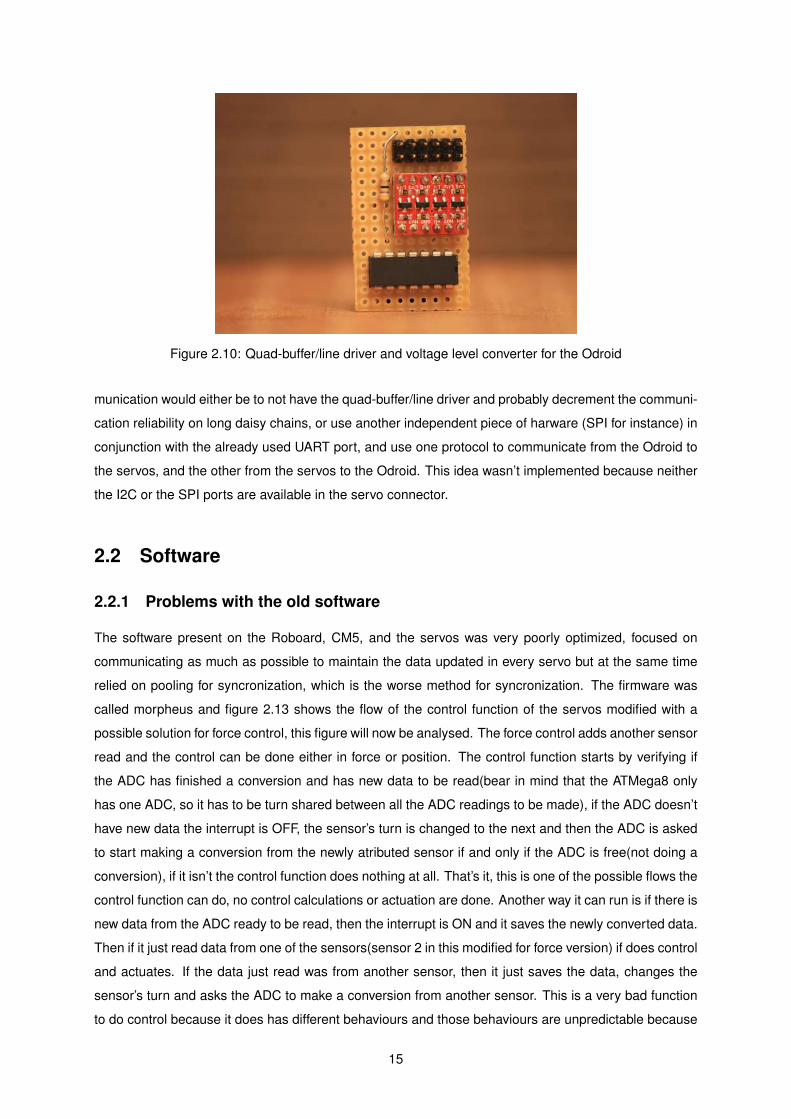
Figure 2.10: Quad-buffer/line driver and voltage level converter for the Odroid
munication would either be to not have the quad-buffer/line driver and probably decrement the communi-
cation reliability on long daisy chains, or use another independent piece of harware (SPI for instance) in
conjunction with the already used UART port, and use one protocol to communicate from the Odroid to
the servos, and the other from the servos to the Odroid. This idea wasn’t implemented because neither
the I2C or the SPI ports are available in the servo connector.
2.2 Software
2.2.1 Problems with the old software
The software present on the Roboard, CM5, and the servos was very poorly optimized, focused on
communicating as much as possible to maintain the data updated in every servo but at the same time
relied on pooling for syncronization, which is the worse method for syncronization. The firmware was
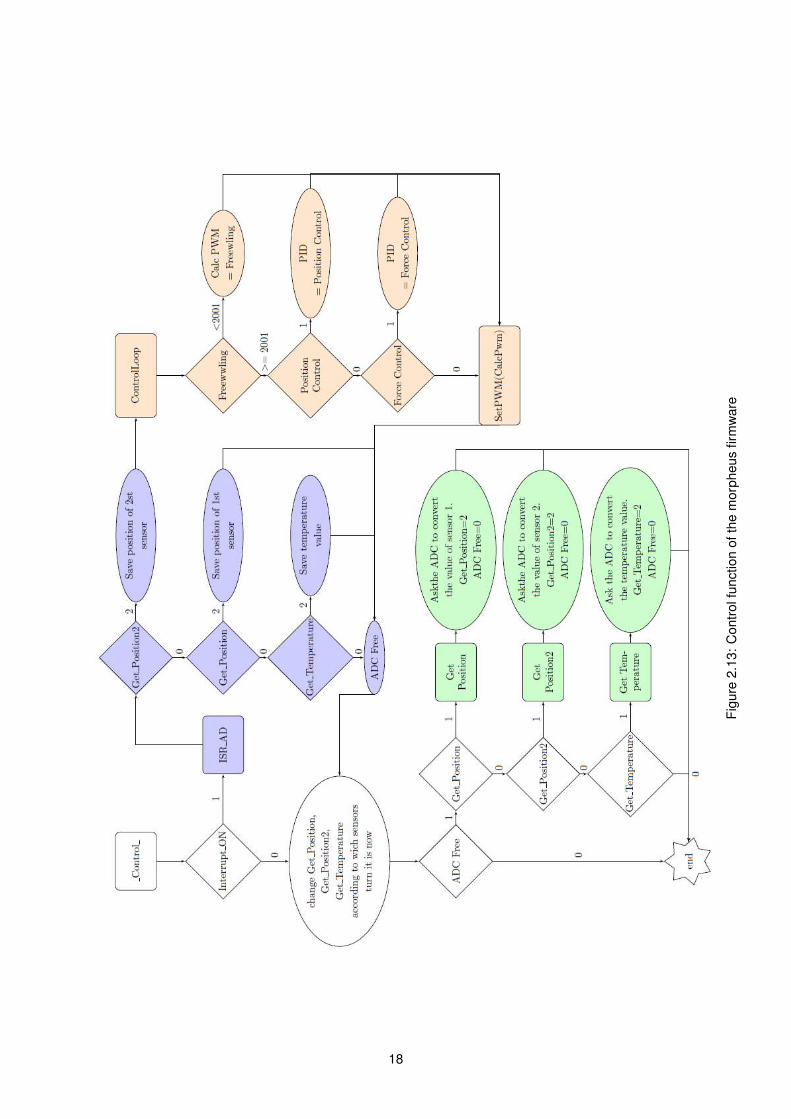
called morpheus and figure 2.13 shows the flow of the control function of the servos modified with a
possible solution for force control, this figure will now be analysed. The force control adds another sensor
read and the control can be done either in force or position. The control function starts by verifying if
the ADC has finished a conversion and has new data to be read(bear in mind that the ATMega8 only
has one ADC, so it has to be turn shared between all the ADC readings to be made), if the ADC doesn’t
have new data the interrupt is OFF, the sensor’s turn is changed to the next and then the ADC is asked
to start making a conversion from the newly atributed sensor if and only if the ADC is free(not doing a
conversion), if it isn’t the control function does nothing at all. That’s it, this is one of the possible flows the
control function can do, no control calculations or actuation are done. Another way it can run is if there is
new data from the ADC ready to be read, then the interrupt is ON and it saves the newly converted data.
Then if it just read data from one of the sensors(sensor 2 in this modified for force version) if does control
and actuates. If the data just read was from another sensor, then it just saves the data, changes the
sensor’s turn and asks the ADC to make a conversion from another sensor. This is a very bad function
to do control because it does has different behaviours and those behaviours are unpredictable because
15

they depend on extrageneous input(the ADC state), and on top of that, this function isn’t called at a fixed
sample time, but every 6 times the main loop works, and the main loop may take virtually no time to run,
or 0.1 miliseconds depending if there was data transmited or received or not. This is just an example of
how poorly done the previous firmware was written, but similar quality code can be found on the CM5
and on the Roboard. The biggest problem with the previous software is that nowhere from the Roboard
to the servos there is a fixed sample time for anything.
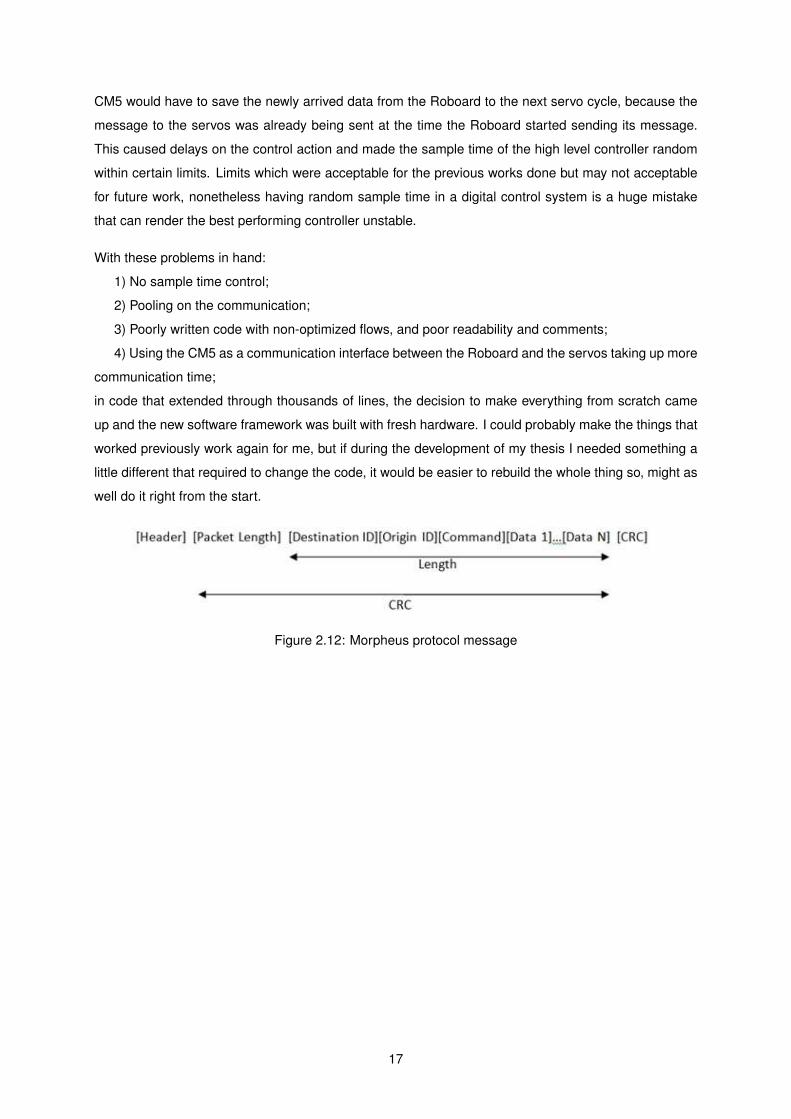
The protocol on the other hand is solid and well thought out, figure 2.11 ilustrates the communication
flow and figure 2.12 shows the message layout. As the servos are connected via a daisy chain to the high
level controller, messages can’t be directed at a certain slave. To be able to get data from all the servos
without having to ask each one to send data, all the servos are listening to what is being transmitted and
each servo knows when it’s their turn to return their data to the high level controller. As each servo has a
unique to the robot identification number, the servo with ID=1 knows it’s the first to send its data, the rest
of the servos wait for this servo to finish the communication, and after that the servo with ID=2 knows
it’s his turn to send data, and so on. The communication with new control commands from the high level
controller on the other hand is a big message to all the servos, the message data is composed of servo
ID’s and actual data. The servos know which data is their’s because it’s the data from their ID number
on, and the message size for each servo on the broadcasted message is fixed(2 bytes) so that there
is no way that a servo confuses data with an ID number. The communication scheme used in the new
software has the same logic as this one. Note that only the communication scheme has been taken to
the new software because the actual code that implemented the old software relied on pooling instead
of harware interrupts.
Figure 2.11: Communication flow
Another problem with the old firmware was the speed at wich the Roboard could communicate with
the CM5, it communicated at 115200bps without any sample time control as the code was no more than
an s-function generated by matlab. As there was no syncronization, and the Roboard communicated
much slower than the servos, the messages from the servos and the Roboard would overlay and the
16
CM5 would have to save the newly arrived data from the Roboard to the next servo cycle, because the
message to the servos was already being sent at the time the Roboard started sending its message.
This caused delays on the control action and made the sample time of the high level controller random
within certain limits. Limits which were acceptable for the previous works done but may not acceptable
for future work, nonetheless having random sample time in a digital control system is a huge mistake
that can render the best performing controller unstable.
With these problems in hand:
1) No sample time control;
2) Pooling on the communication;
3) Poorly written code with non-optimized flows, and poor readability and comments;
4) Using the CM5 as a communication interface between the Roboard and the servos taking up more
communication time;
in code that extended through thousands of lines, the decision to make everything from scratch came
up and the new software framework was built with fresh hardware. I could probably make the things that
worked previously work again for me, but if during the development of my thesis I needed something a
little different that required to change the code, it would be easier to rebuild the whole thing so, might as
well do it right from the start.
Figure 2.12: Morpheus protocol message
17
Figu
re2.
13:
Con
trolf
unct
ion
ofth
em
orph
eus
firm
war
e
18
2.2.2 Linux UART Driver
Although the Odroid U3 is capable of driving the UART port at 4Mbps, the stock linux driver in the
Odroid U3 port limits the communication speed 921600Kbps. Note that this is not the same as 1Mbps,
and as the servo’s UART driver can’t communicate at that speed, the next compatible speed with both
systems is 500Kbps, this is the max baudrate the Odroid can communicate with the servos with the stock
UART driver. As one of the primary goals when choosing the Odroid was to have fast communication
speeds, the driver needed to be modified in order to allow up to 2Mbps(the fastest the ATMega8’s
can communicate through UART). Reading the kernel source code on github we can find that in the
linux/drivers/tty/serial/samsung.c file, the function uart get baud rate has as last argument 8*115200
which equals 921600, this argument to the function is the max baud the function will allow communication
to occour. Although this was discovered and modified to allow faster communication speeds the Odroid’s
baudrate stayed capped at 921600 and the problem wasn’t solved.
Nevertheless even at 500Kbps the whole communication takes less time than the previous because
the communication is direct to the servos at 500Kbps, instead of at 115200bps to the CM5 and then at
1Mbps to the servos. Communication at 500000Kbps is more than 4 times faster than at 115200.
2.2.3 Pipelined Distributed High Level Controller Software
In digital control systems, maintaining a controlled sample-time with a minimum frequency is fundamen-
tal [9]. The Nyquist criterion (eq. 2.1) states that the minimum sample period should be less than or
equal to half of the minimum period on the system, conversely the minimum sample frequency should be
at least twice the maximum frequency the system achieves(the system’s bandwidth). In the real world, a
more conservative rule should be applied to avoid aliasing the signals on higher frequencies. Equation
2.2 suggests a lower frequency limit of 10 times the maximum system frequency and an upper limit of
20 times the maximum system frequency, which helps reducing erroneus high frequency noise from the
sensors.
T ≤ Tmin
2or F ≥ 2Fmax (2.1)
10F ≤ Fmax ≤ 20F (2.2)
Walking is a very complex task, humans have evolved in non trivial ways to be able to attain efficient
and stable walking patterns[8] [24]. Some periods on the walking cycle require feedback control of force
at very high rates. What nature did to allow controlling force at those high rates, for instance in the period
between heel strike and toe strike, was distribute the control scheme along the nervous system and use
”pre-programmed” patterns that don’t require real-time processing and are activated by certain triggers
throughout the gait cycle[10], that’s why we need to learn how to walk, and why we fall if we miss a
step. In robotics this can also be done to allow robots to have human like reactions, but in this thesis a
more modest control scheme was aproached, with simple real-time feedback control for walking. With
19

this kind of controller, every movement needs to be calculated and syncronized between all the joints
of the robot, this requires a very fast control platform that will allow the implementation of the controller
and be able to deliver the minimum sample time needed to control the robot. Having this requirement,
the possibilities to materialize such a system were studied, and a pipelined parallel control scheme was
developed.
Analisys of the control system
The system to be controlled is a robot with up to 18 DOF’s(12 for both legs and 6 for the arms), each
DOF’s control action will most certainly deppend on the control actions of other DOF’s not only in the
forward or inverse kinematics fashion but also because inertial forces generated for instance in the arm
of the robot will influence the force done on the foot. Also walking methodologies like the ZMP [18]
method require coupled calculation of the control actions for all the joints. This part of the control system
requires data from all the sensors and the calculations can’t be parallelized. But normally these central
control systems only calculate the trajectory of the joints, leaving the control of the actuator out. The
control of the actuator is responsible for generating the required control action on the actuator itself such
that the high level control order is followed, normally a PID is used for this, and contrary to the trajectory
planning control, this control system is independend for each actuator. This means that the low level
control of the actuators can be parallelized. With this in hand the layout of the computational platform
for the control system can be developed.
As analysed in the previous section, in humanoid robots increasing the sample rate gives more
possibilities. The MIT Cheetah [22] makes use of a highly optimized computational platform to allow the
required sample time to make the robot run(4000Hz). There are no specific requirements for the robot in
this thesis, so no required sample-time can be calculated, but having the fastest possible platform from
the start is a good way to start, and when the limit of this platform is achieved, a whole new platform
with faster hardware should be developed, or even a more serious robot. This is preferred to building an
”enough for now” platform that may be rendered useless in less than a year. With this perspective, the
fastest possible controller platform was developed.
Analysis of the hardware
The selected platform, the Odroid has four cores in its CPU, and the microcontrollers on the servos also
have computational capability. The layout of the Odroid is shown in figure 2.14, the use of USB has
been rulled out because of inherent delay issue so there are two ways the Odroid can communicate
reliably with the servos: UART and I2C. The servos’ communication ports are shown in figure 2.15,
although the microcontroller has SPI and I2C communication capability, only the UART port is available
in the servo’s connectors. With this we have a dedicated CPU for each actuator(in the servos), 4 general
purpose CPUs(on the Odroid) and way of communicating between all of them(UART). This immediatly
suggests implementing the high level dependent control on the Odroid and the low level independent
control on the servos’ microcontroller.
20

CPU1 CPU2 CPU3 CPU4
Samsung Exynos 4412
USB UART I2C
All ports are accessible on the Odroid U3 board
Figure 2.14: Odroid CPUs and communication ports
ATMega8
CPU
SPI UART I2C
Only the UART port is available in the connector of the dynamixel PCB
Figure 2.15: ATMega8 communication ports
21

Paralelizing tasks
The required tasks for such a system to work are:
-The low level controllers read the sensors;
-The low level controllers send data to the high level controller;
-The high level controller reads data from the low level controllers;
-The high level controller calculates the next high level control action;
-The high level controller sends the high level control action to all the low level controllers;
-The low level controllers read data from the high level controller;
-The low level controllers calculate the next low level control action;
-The low level controllers act;
Since we have multiple cores at our disposal and some of the required tasks don’t need to be done
serially, parallel processing can be implemented [22] to increase the max sampling frequency the system
can achieve. On the Odroid side paralelization can only be implemented in a pipeline fashion because
the tasks of the high level controller are all dependent and thus need to be acomplished serialy. Because
control calculations can only be done after the data from the servos is received, and sending data to the
servos is only possible after the calculations have completed. Nonetheless these tasks are separable
and uncoupled, and while the control calculations from sample moment t are being done, the Odroid can
be receiving data from sample moment t+1, so that when the calculations from moment t are complete,
data for the next calculations is ready.
Figure 2.18 shows the tasks of the high level controller in the order they have to be done. If a regular
single worker method is implemented, that is a single program does everything in loop, the workflow in
figure 2.19 is achieved. If on the other hand a multiworker method is implemented the workflow of figure
2.20 is achieved. The pipeline method has decreased the time needed to acomplish two time steps by
a third, supposing that all the tasks take the same time to complete. Comparing figure 2.19 and 2.20
we can verify that the pipelined solution doesn’t increase the sample-time but increases the sample-
rate. The throughput is augmented, 3 tasks are running simultaneously all the time, thus this method is
computationally more efficient because at no point there is an idling pipeline stage. Note that altough
this is possible to acomplish in some systems, it isn’t possible in the system of this thesis because as
was seen previously, the servos only have the UART port available in the connector and because of the
quad-buffer/line driver, full-duplex communication isn’t possible although the UART hardware both on
the Odroid and on the ATMega8s is capable of full-duplex communication. This leaves just one option,
to not paralelize the communication as figure 2.16 shows. In this scheme there is no aparent reason
to have separate processes for reading and writing on the communication bus, but as the messages
need to be assembled before they are sent and also need to be interpreted when they arrive there would
be some time lost if these tasks weren’t parallel. Figure 2.17 illustrates how these processes overlap.
The parallelism isn’t working at the communication port level, but only at the processing tasks level of
these processes. As the reading process finishes receiving a message from the servos, it still needs to
deconstruct the message, save the data to appropriate variables and pass it to the controller. Having
the read process separate to the send process allows to have the send process start sending as soon
22
Read Data
Send Data
Control Calc.
Read Data
Send Data
Control Calc.
CPU 1
CPU 2
CPU 3
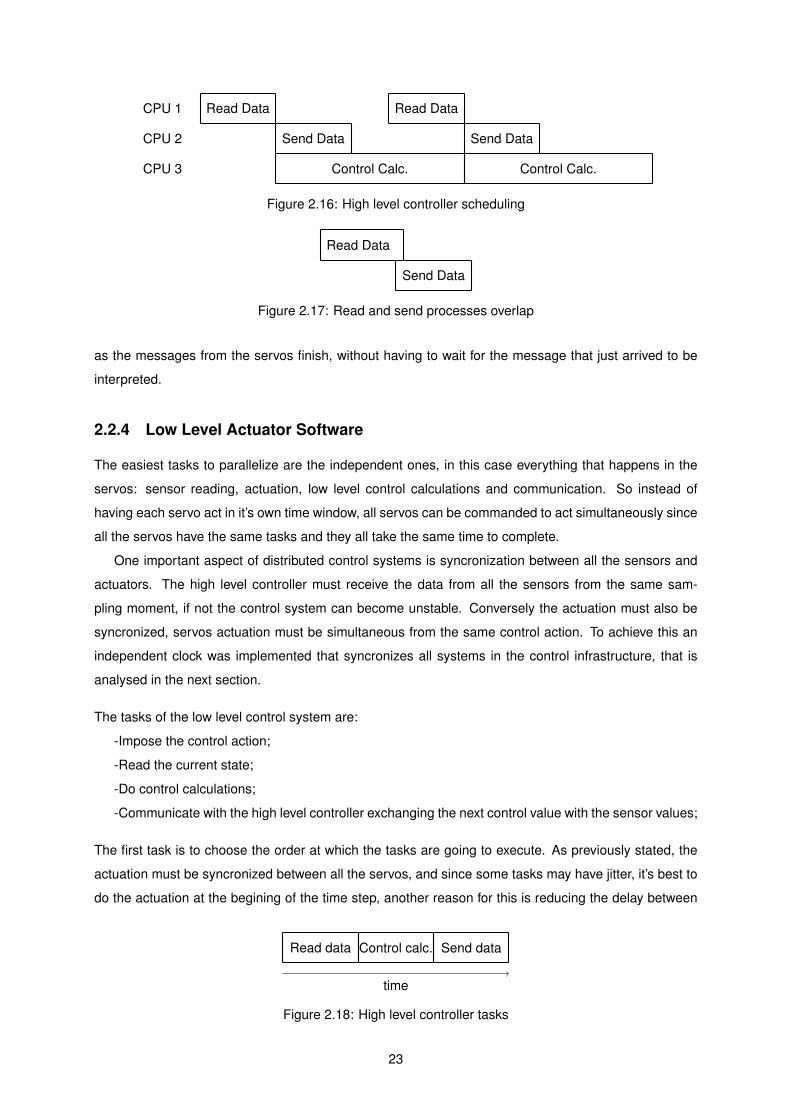
Figure 2.16: High level controller scheduling
Read Data
Send Data
Figure 2.17: Read and send processes overlap
as the messages from the servos finish, without having to wait for the message that just arrived to be
interpreted.
2.2.4 Low Level Actuator Software
The easiest tasks to parallelize are the independent ones, in this case everything that happens in the
servos: sensor reading, actuation, low level control calculations and communication. So instead of
having each servo act in it’s own time window, all servos can be commanded to act simultaneously since
all the servos have the same tasks and they all take the same time to complete.
One important aspect of distributed control systems is syncronization between all the sensors and
actuators. The high level controller must receive the data from all the sensors from the same sam-
pling moment, if not the control system can become unstable. Conversely the actuation must also be
syncronized, servos actuation must be simultaneous from the same control action. To achieve this an
independent clock was implemented that syncronizes all systems in the control infrastructure, that is
analysed in the next section.
The tasks of the low level control system are:
-Impose the control action;
-Read the current state;
-Do control calculations;
-Communicate with the high level controller exchanging the next control value with the sensor values;
The first task is to choose the order at which the tasks are going to execute. As previously stated, the
actuation must be syncronized between all the servos, and since some tasks may have jitter, it’s best to
do the actuation at the begining of the time step, another reason for this is reducing the delay between
Read data Control calc. Send data
time
Figure 2.18: High level controller tasks
23

Read data Control calc. Send data Read data Control calc. Send data
time
Figure 2.19: Tasks in serial(2 time-steps)
Read data Control calc. Send data
Read data Control calc. Send data
time
Figure 2.20: Tasks in pipeline
reading the sensors and acting. The other task that has time requirements is reading the sensors, so it
was put after the actuation. The tasks with most jitter are the communication and the control calculations,
so those were left for last, as for their order, if the communication is done before doing control, the control
calculations benefit from freshly arrived data, so the final task scheduling for the low level controllers is
as figure 2.21 ilustrates. The software that implements this is controlled by interrupts to ensure the
time requirements. The scheduling of figure 2.21 suggests after data is sent to the high level controller
and the high level controller responds immediatly. Note that all the servos are running this schedule in
parallel and the communication line is unique, so to allow this each servo knows when it’s time to send
its data from its identification number. The first servo to send is servo with ID=1, this servo doesn’t wait,
as soon as it finishes reading the ADC it sends data to the high level controller. Meanwhile the other
servos are actually listening on the line, and only after servo n has completed its communication, will
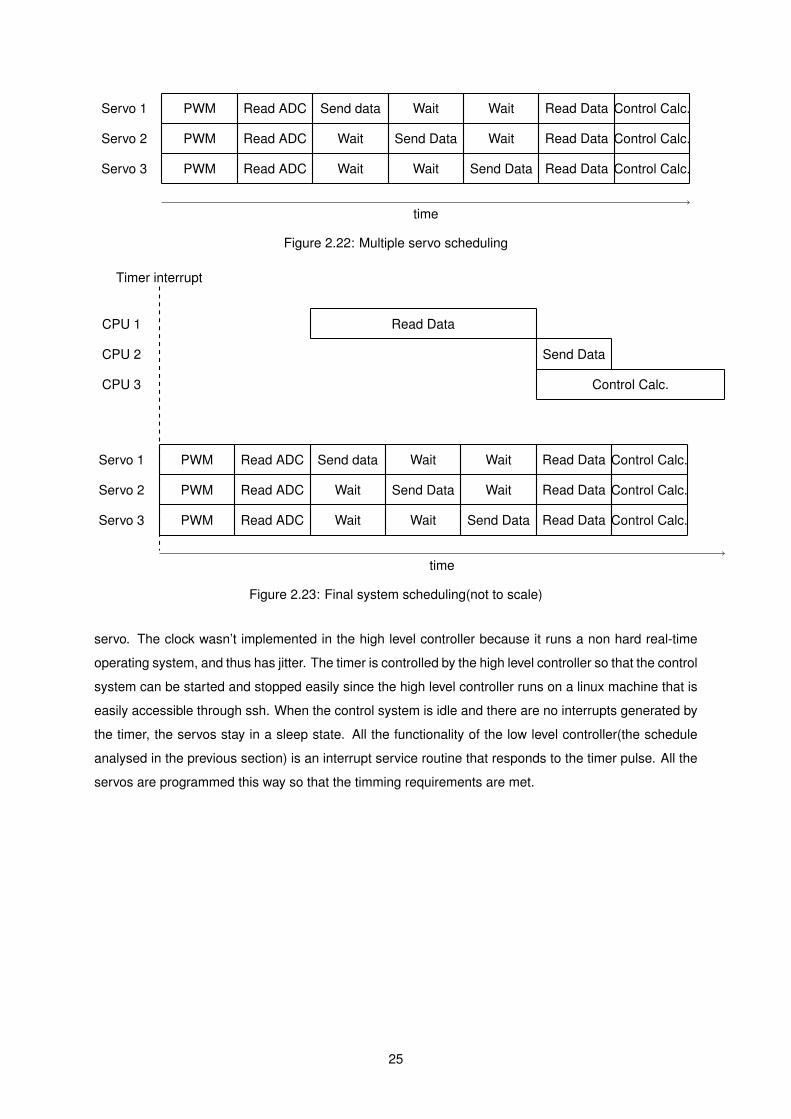
servo n + 1 start its communication, as figure 2.22 ilustrates. Note that although the communication
scheduling is the same as implemented before and shown in figure 2.11, the old software scheduling did
one communication per sample time(although there was no fixed sample time, I am calling sample time
the time between two consecutive actuations of the low level software), so in practice if 12 servos were
implemented, 12 time steps were needed for all the servos to send their data to the high level controller,
while with this software only one time step is needed. Although this system still works as a master/slave
system, the master controller has the same bandwidth as the the slave controllers.
2.2.5 System Timer
The system timer was implemented in an ATMega8 from a dynamixel servo. The timer is a program
that uses a hardware clock to generate pulses, those pulses are fed to an output pin of the chip and
fed into the interrupt input pins of all the servos. This way the sample time can’t drift from servo to
PWM Read ADC Send data Read data Control calc.
time
Figure 2.21: Low level controller scheduling
24
PWM Read ADC Send data Wait Wait Read Data Control Calc.
PWM Read ADC Wait Send Data Wait Read Data Control Calc.
PWM Read ADC Wait Wait Send Data Read Data Control Calc.
time
Servo 1
Servo 2
Servo 3
Figure 2.22: Multiple servo scheduling
Timer interrupt
Read Data
Send Data
Control Calc.
CPU 1
CPU 2
CPU 3
PWM Read ADC Send data Wait Wait Read Data Control Calc.
PWM Read ADC Wait Send Data Wait Read Data Control Calc.
PWM Read ADC Wait Wait Send Data Read Data Control Calc.
time
Servo 1
Servo 2
Servo 3
Figure 2.23: Final system scheduling(not to scale)
servo. The clock wasn’t implemented in the high level controller because it runs a non hard real-time
operating system, and thus has jitter. The timer is controlled by the high level controller so that the control
system can be started and stopped easily since the high level controller runs on a linux machine that is
easily accessible through ssh. When the control system is idle and there are no interrupts generated by
the timer, the servos stay in a sleep state. All the functionality of the low level controller(the schedule
analysed in the previous section) is an interrupt service routine that responds to the timer pulse. All the
servos are programmed this way so that the timming requirements are met.
25

26

27

Chapter 3
Force Actuator
3.1 Introduction to Force Control
Robot actuators are still generally position controlled, this control method is very good for precise repet-
itive tasks like painting a car or spot welding. But if a robot is to be in contact with new environments
or different tasks are required, position precision is not very helpful. One good example (for people who
drive cars at least) is what happens when we use the gearbox of a car we’re driving for the first time,
although we know the gear lever is there(we can see it) the feel can be very different, the throw can
be different, we need may need to apply more force or it may take more time for gears to engage, we
can feel it because we know the ammount of force we’re doing, we use force feedback to feel what’s
happening and learn the behaviour of the new gearbox. If we program a robotic arm to shift gears of
a car by position feedback, it will be able to use that specific gearbox or very similar ones only. For
instance if the gearbox we programmed it for is the one in figure 3.1 on the left and we put the robot in
a car with the gearbox on the right then it will very likely damage the gearbox or itself, at least in the
long run because without force feedback the position controllers will force the joints to move although
the movement is constrained by the shorter throw of the gear lever. If on the other hand the robot knew
that to engage first gear it needed to apply 20N max to the left and stop if the force increased without
further movement and then another 20N max to the front until no more movement was possible without
increasing force drasticaly, then the robot could put any car in first gear, just like we do.
Force control is also required for safe use of robots that interact with people, the ability to limit the
applied force is very important to keep the robots safe in delicate environments [7]. The ability to pick up
objects without damaging or dropping them is another task that requires force control [13] [4]. Last but
most important for this thesis, force control is important to make robots walk, or at least very helpfull and
brings numerous advantages [12] [17]. It’s been shown that humans change the impedance of the legs
deppending on the walking speed and the floor surface type [14]. This brings up the concept of variable
impedance.
Impedance is a measure of how much something resists motion when subjected to a force. Con-
versely, compliance is how much something accepts motion when subjected to an external force. Human
28
Figure 3.1: Long and tight vs short and loose gearboxes
muscles have very low impedance, when we aren’t contracting a muscle it doesn’t resist any motion pro-
voked by external forces. This behaviour is opposite to that of conventional robot actuators, not only
position controlled but also force controlled. Normally stiffness(higher impedance) is an advantage to
position control because it offers more precision and repetability but adding compliance to the robot’s
actuators is a step towards getting all the advantages mentioned above plus those of passive walk-
ers(namely energy saving and regeneration) [21].
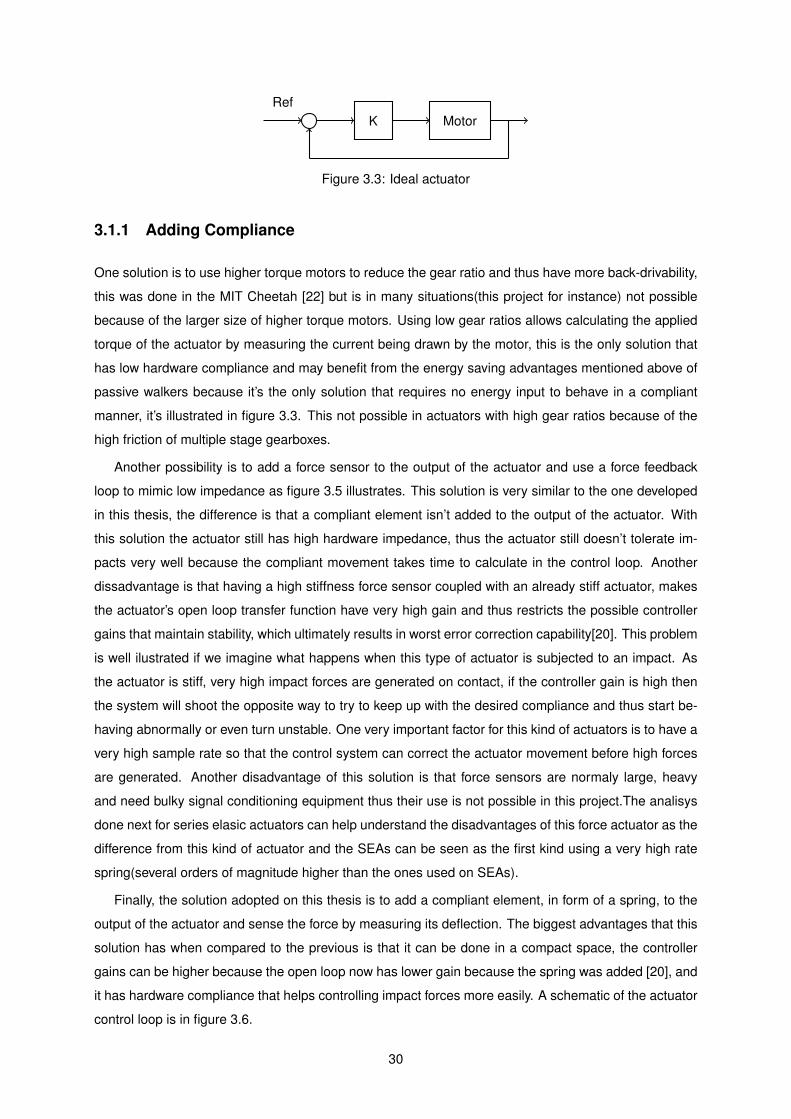
Most robot actuators use high speed, low torque electric motors. As the output torque of the motors
is too small, they are connected to high gear ratio gearboxes (larger than 1:100) to convert speed to
the required torque as figure 3.4 illustrates, these gearboxes have multiple stages, figure 3.2 shows the
disassembled gearbox of the AX-12 (5 stages), these gearboxes make the actuator non-backdrivable
and thus with low compliance. Note that normally when high gear ratios are needed multiple gear stages
are needed to maintain the actuator in a confined space, if a single stage 1:100 gearbox was used then
the torque could be estimated by the current on the motor, it’s the multiple stages that add friction and
loose energy, and thus are the problem with conventional actuators[16].
Figure 3.2: Disassembled AX-12 Dynamixel gearbox
29
K MotorRef
Figure 3.3: Ideal actuator
3.1.1 Adding Compliance
One solution is to use higher torque motors to reduce the gear ratio and thus have more back-drivability,
this was done in the MIT Cheetah [22] but is in many situations(this project for instance) not possible
because of the larger size of higher torque motors. Using low gear ratios allows calculating the applied
torque of the actuator by measuring the current being drawn by the motor, this is the only solution that
has low hardware compliance and may benefit from the energy saving advantages mentioned above of
passive walkers because it’s the only solution that requires no energy input to behave in a compliant
manner, it’s illustrated in figure 3.3. This not possible in actuators with high gear ratios because of the
high friction of multiple stage gearboxes.
Another possibility is to add a force sensor to the output of the actuator and use a force feedback
loop to mimic low impedance as figure 3.5 illustrates. This solution is very similar to the one developed
in this thesis, the difference is that a compliant element isn’t added to the output of the actuator. With
this solution the actuator still has high hardware impedance, thus the actuator still doesn’t tolerate im-
pacts very well because the compliant movement takes time to calculate in the control loop. Another
dissadvantage is that having a high stiffness force sensor coupled with an already stiff actuator, makes
the actuator’s open loop transfer function have very high gain and thus restricts the possible controller
gains that maintain stability, which ultimately results in worst error correction capability[20]. This problem
is well ilustrated if we imagine what happens when this type of actuator is subjected to an impact. As
the actuator is stiff, very high impact forces are generated on contact, if the controller gain is high then
the system will shoot the opposite way to try to keep up with the desired compliance and thus start be-
having abnormally or even turn unstable. One very important factor for this kind of actuators is to have a
very high sample rate so that the control system can correct the actuator movement before high forces
are generated. Another disadvantage of this solution is that force sensors are normaly large, heavy
and need bulky signal conditioning equipment thus their use is not possible in this project.The analisys
done next for series elasic actuators can help understand the disadvantages of this force actuator as the
difference from this kind of actuator and the SEAs can be seen as the first kind using a very high rate
spring(several orders of magnitude higher than the ones used on SEAs).
Finally, the solution adopted on this thesis is to add a compliant element, in form of a spring, to the
output of the actuator and sense the force by measuring its deflection. The biggest advantages that this
solution has when compared to the previous is that it can be done in a compact space, the controller
gains can be higher because the open loop now has lower gain because the spring was added [20], and
it has hardware compliance that helps controlling impact forces more easily. A schematic of the actuator
control loop is in figure 3.6.
30
K Motor GearboxRef
Figure 3.4: Regular actuator schematic
K Motor Gearbox Sensor
F
Ref
Figure 3.5: Force control using a high impedance force sensor
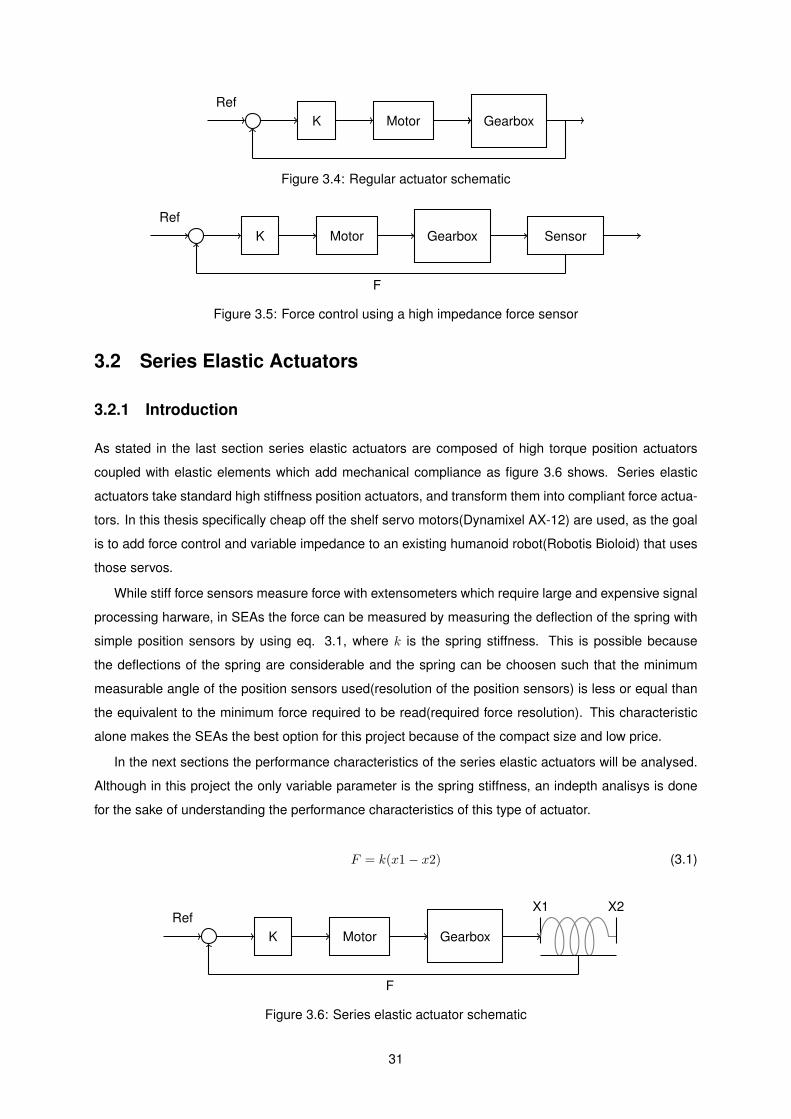
3.2 Series Elastic Actuators
3.2.1 Introduction
As stated in the last section series elastic actuators are composed of high torque position actuators
coupled with elastic elements which add mechanical compliance as figure 3.6 shows. Series elastic
actuators take standard high stiffness position actuators, and transform them into compliant force actua-
tors. In this thesis specifically cheap off the shelf servo motors(Dynamixel AX-12) are used, as the goal
is to add force control and variable impedance to an existing humanoid robot(Robotis Bioloid) that uses
those servos.
While stiff force sensors measure force with extensometers which require large and expensive signal
processing harware, in SEAs the force can be measured by measuring the deflection of the spring with
simple position sensors by using eq. 3.1, where k is the spring stiffness. This is possible because
the deflections of the spring are considerable and the spring can be choosen such that the minimum
measurable angle of the position sensors used(resolution of the position sensors) is less or equal than
the equivalent to the minimum force required to be read(required force resolution). This characteristic
alone makes the SEAs the best option for this project because of the compact size and low price.
In the next sections the performance characteristics of the series elastic actuators will be analysed.
Although in this project the only variable parameter is the spring stiffness, an indepth analisys is done
for the sake of understanding the performance characteristics of this type of actuator.
F = k(x1− x2) (3.1)
K Motor Gearbox
X1 X2
F
Ref
Figure 3.6: Series elastic actuator schematic
31
Motor Gearbox
KForce
X1 X2Voltage
Figure 3.7: Open loop block diagram
Motor Gearbox m
KForce
X1 X2Voltage
Figure 3.8: Open loop block diagram with inertial load
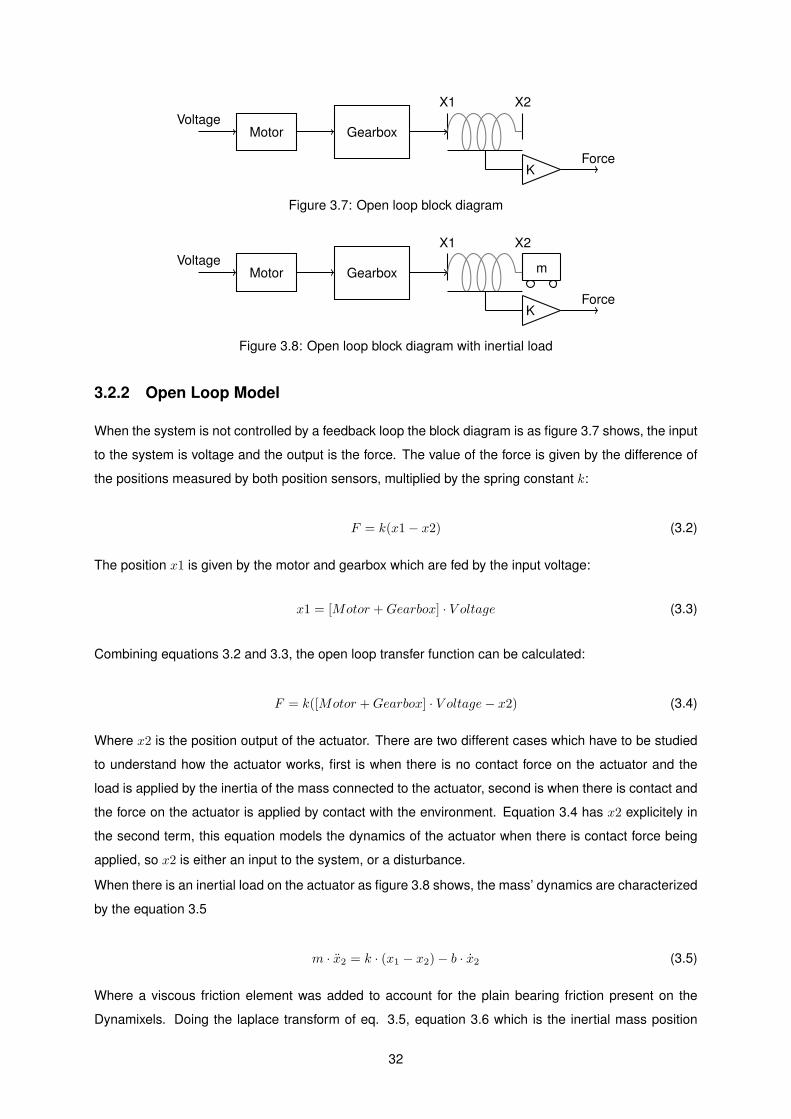
3.2.2 Open Loop Model
When the system is not controlled by a feedback loop the block diagram is as figure 3.7 shows, the input
to the system is voltage and the output is the force. The value of the force is given by the difference of
the positions measured by both position sensors, multiplied by the spring constant k:
F = k(x1− x2) (3.2)
The position x1 is given by the motor and gearbox which are fed by the input voltage:
x1 = [Motor +Gearbox] · V oltage (3.3)
Combining equations 3.2 and 3.3, the open loop transfer function can be calculated:
F = k([Motor +Gearbox] · V oltage− x2) (3.4)
Where x2 is the position output of the actuator. There are two different cases which have to be studied
to understand how the actuator works, first is when there is no contact force on the actuator and the
load is applied by the inertia of the mass connected to the actuator, second is when there is contact and
the force on the actuator is applied by contact with the environment. Equation 3.4 has x2 explicitely in
the second term, this equation models the dynamics of the actuator when there is contact force being
applied, so x2 is either an input to the system, or a disturbance.
When there is an inertial load on the actuator as figure 3.8 shows, the mass’ dynamics are characterized
by the equation 3.5
m · x2 = k · (x1 − x2)− b · x2 (3.5)
Where a viscous friction element was added to account for the plain bearing friction present on the
Dynamixels. Doing the laplace transform of eq. 3.5, equation 3.6 which is the inertial mass position
32

transfer function is obtained.
X2
X1=
k
ms2 + bs+ k(3.6)
The open loop transfer function of the system when there is an inertial load connected to the output of
the actuator can be determined by combining equations 3.4 and 3.6, equation 3.7 is the result.
F
V oltage= [Motor +Gearbox]
(k − k2
ms2 + bs+ k
)(3.7)
3.2.3 Motor and Gearbox Mathematical Model
The dynamics of the motor and gearbox limit the capabilities of series elastic actuators, as such a real
model is used. The parametric model was obtained by Tiago Rato [19] in his thesis and it includes the
dynamics of the motor and the gearbox, from the input voltage to the output angle on the servo. The
parametric equation used was that of equation 3.8, where V is voltage, L is inductance, R is resistance,
J is the gearbox inertia, b is the viscous friction, and K is a constant that relates torque with current.
The identified values yield the transfer function of equation 3.9. Figure 3.9 is the result of a simulation,
in blue is the input voltage to the motor, in red is the simulated output in radians and in green is the real
output also in radians. This is included to prove the validity of the used model.
θ
V=
K
JLs3 + (Lb+ JR)s2 + (Rb+K2)s(3.8)
θ
V=
0.0071
9.09× 10−7s3 + 9.09× 10−4s2 + 0.013s(3.9)
Figure 3.9: Validation results of the dynamixel identification by Tiago Rato
The voltage used on the AX-12s is 9.8V but it can go up to 12V, so depending on the voltages used,
the dynamics of the series elastic actuator will differ, so that a higher voltage will always deliver better
33

Kp1s
X1 X2
K
Fd
F
+
-
Figure 3.10: Series elastic actuator schematic
performance. The voltage used with this model to test the full SEA model is 12V, so the best possible
performance is evaluated.
3.2.4 Closed Loop: Constrained Position
To understand well the dynamics of series elastic actuators the system will be analysed first with a very
simple motor/gearbox model, a first order integrator with unity gain as the block diagram of figure 3.10
ilustrates. As done previously the output of the system is the force, and it is given by equation 3.10.
F = k(X1 −X2) (3.10)
X1 is the output of the motor which is given by equation 3.11.
X1 =Kp
s(Fd − F ) (3.11)
By combining equations 3.11 and 3.10, equation 3.12 results.
F
(s+KKp
s
)=KKp
sFd −KX2 (3.12)
Equation 3.12 can yield the transfer function from the desired force Fd to the output force F , or the
transfer function from the desired force Fd to the output position X2.
Force Control
Fixing the output position X2 the transfer function from the Fd to F results and is represented in equation
3.13. This transfer function represents the dynamics of the actuator when in contact with a fixed body
or object in the environmnet, for instance when the robot’s leg is on the ground and the force done on
the ground is being controled. To improve the performance of the actuator in this scenario, equation
3.14 suggests that that both the controler gain Kp and the spring stiffness K should be increased. This
moves the only pole of the system (a real pole) to the left of the complex plane, making the system
quicker in tracking the desired force, and increasing the bandwidth.
F
Fd=
KKp
s+KKp(3.13)
34

Output Impedance
Now fixing the desired force Fd and letting X2 vary, equation 3.14 results. This expression can be seen
as the output impedance if we take X2 as an extrageneous disturbance that affects the desired force
tracking. The goal in this type of actuators is to haveX2 affect F the least possible so that output position
disturbances are well attenuated. To acomplish this, the spring stiffness K should be decreased and the
controler gain Kp should be increased, by doing this the overall impedance of the actuator is lowered.
F
X2=
−Kss+KKp
(3.14)
Analysing the bode diagram of equation 3.14, we can see the influence of K and Kp in the frequency
response. The response in blue is obtained when K = 1 and Kp = 1, by increasing both K and Kp to
10 the response in green in obtained. If K is decreased and Kp is increased as suggested in the last
paragraph to 5 and 500 respectively the response in red is obtained. As can be seen, to decrease the
influence of X2 in F , K should be decreased and Kp should be increased for frequency response to
attenuate the maximum possible, the widest spectrum of frequencies.
Figure 3.11: [green:K = 10 and Kp = 10] [red: K = 5 and Kp = 500]]Impedance transfer function bode diagram for
various K and Kp values
35
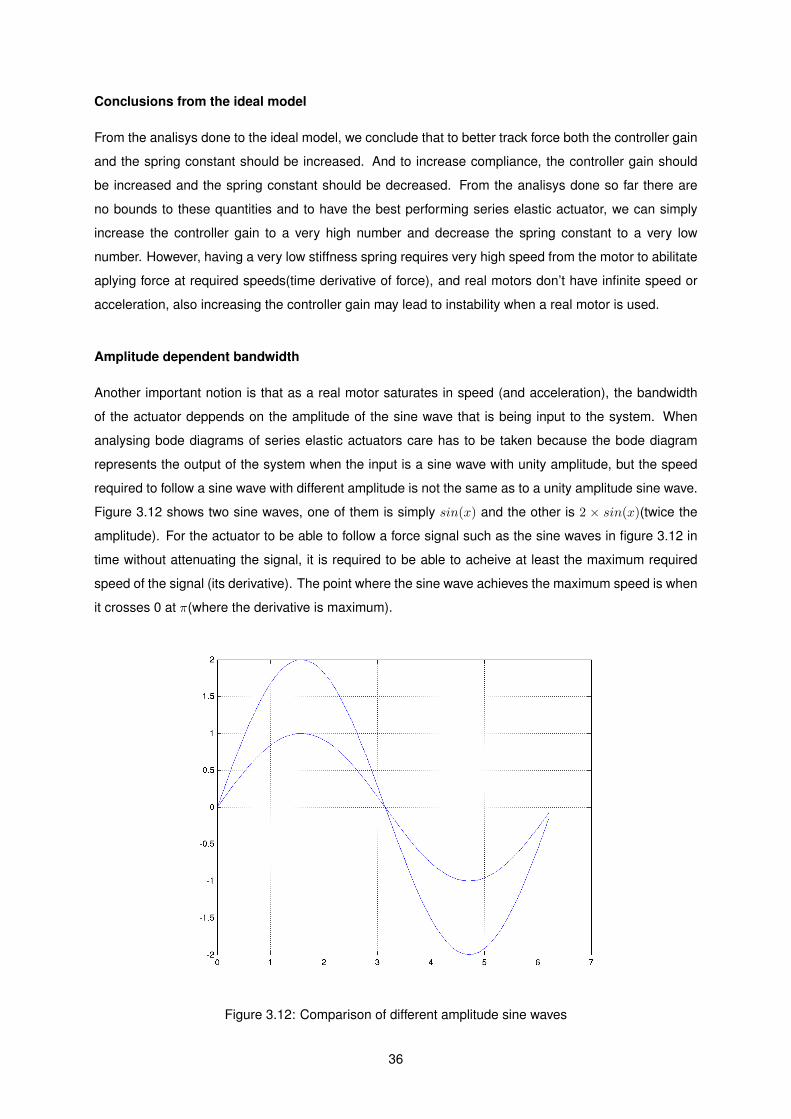
Conclusions from the ideal model
From the analisys done to the ideal model, we conclude that to better track force both the controller gain
and the spring constant should be increased. And to increase compliance, the controller gain should
be increased and the spring constant should be decreased. From the analisys done so far there are
no bounds to these quantities and to have the best performing series elastic actuator, we can simply
increase the controller gain to a very high number and decrease the spring constant to a very low
number. However, having a very low stiffness spring requires very high speed from the motor to abilitate
aplying force at required speeds(time derivative of force), and real motors don’t have infinite speed or
acceleration, also increasing the controller gain may lead to instability when a real motor is used.
Amplitude dependent bandwidth
Another important notion is that as a real motor saturates in speed (and acceleration), the bandwidth
of the actuator deppends on the amplitude of the sine wave that is being input to the system. When
analysing bode diagrams of series elastic actuators care has to be taken because the bode diagram
represents the output of the system when the input is a sine wave with unity amplitude, but the speed
required to follow a sine wave with different amplitude is not the same as to a unity amplitude sine wave.
Figure 3.12 shows two sine waves, one of them is simply sin(x) and the other is 2 × sin(x)(twice the
amplitude). For the actuator to be able to follow a force signal such as the sine waves in figure 3.12 in
time without attenuating the signal, it is required to be able to acheive at least the maximum required
speed of the signal (its derivative). The point where the sine wave achieves the maximum speed is when
it crosses 0 at π(where the derivative is maximum).
Figure 3.12: Comparison of different amplitude sine waves
36
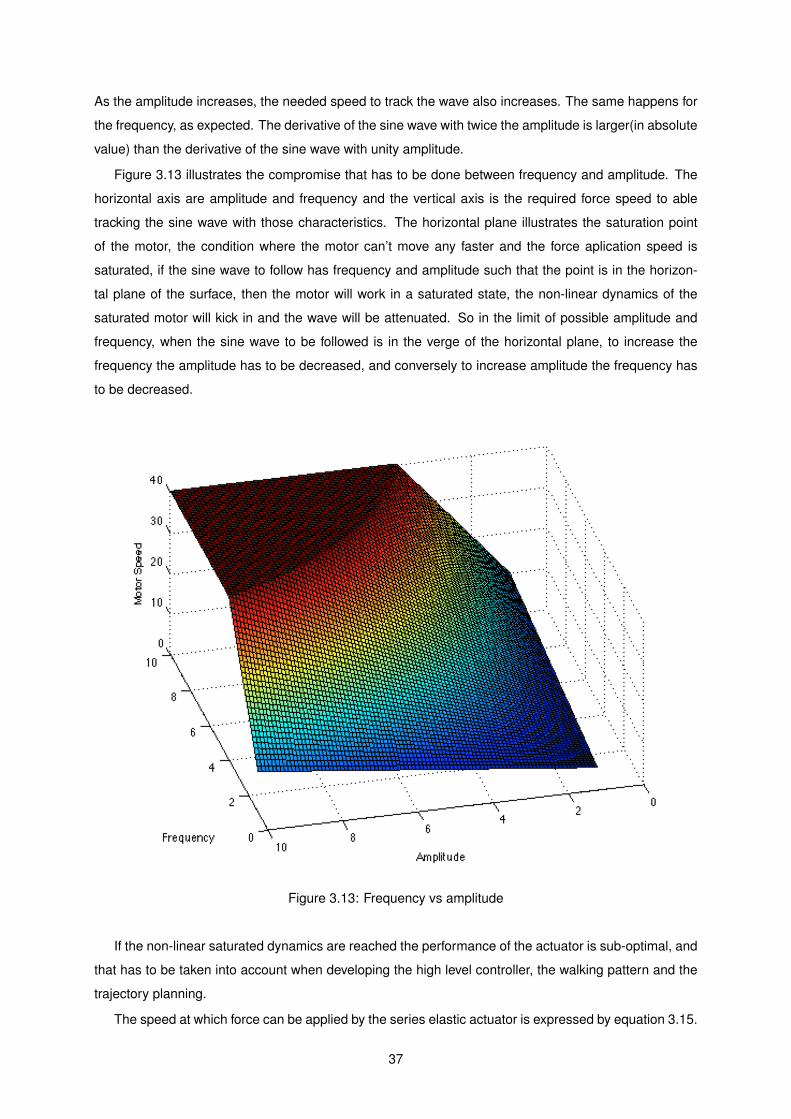
As the amplitude increases, the needed speed to track the wave also increases. The same happens for
the frequency, as expected. The derivative of the sine wave with twice the amplitude is larger(in absolute
value) than the derivative of the sine wave with unity amplitude.
Figure 3.13 illustrates the compromise that has to be done between frequency and amplitude. The
horizontal axis are amplitude and frequency and the vertical axis is the required force speed to able
tracking the sine wave with those characteristics. The horizontal plane illustrates the saturation point
of the motor, the condition where the motor can’t move any faster and the force aplication speed is
saturated, if the sine wave to follow has frequency and amplitude such that the point is in the horizon-
tal plane of the surface, then the motor will work in a saturated state, the non-linear dynamics of the
saturated motor will kick in and the wave will be attenuated. So in the limit of possible amplitude and
frequency, when the sine wave to be followed is in the verge of the horizontal plane, to increase the
frequency the amplitude has to be decreased, and conversely to increase amplitude the frequency has
to be decreased.
Figure 3.13: Frequency vs amplitude
If the non-linear saturated dynamics are reached the performance of the actuator is sub-optimal, and
that has to be taken into account when developing the high level controller, the walking pattern and the
trajectory planning.
The speed at which force can be applied by the series elastic actuator is expressed by equation 3.15.
37

Kp1s
X1 X2X2d
+
-m
Figure 3.14: Position control block diagram
As can be seen, the faster the speed of the motor the faster the actuator will be able to apply force in a
fixed X2 condition. Also the stiffer the spring, the faster the actuator will be apply or change the force
it exerts. If the speed at which the actuator can apply/change force is increased, the horizontal plane
on figure 3.13 goes up and waves with higher frequency and amplitude are supported before the motor
saturates.
F = K(X1 − X2) (3.15)
So the conclusion from this section is that the spring stiffness has a minimum, and it has to be such
that the minimum force application velocity is met. If the motor is changed to a higher speed motor, the
performance of the actuator will increase, because that allows the use of a softer spring without lowering
the bandwidth in any frequency or amplitude, but gaining in lower overall impedance as shown above.
That can be seen in equation 3.15, fixing X2, value of K can be lowered if X1, maintaining F .
3.2.5 Closed Loop: Inertial Load
There are situations where the robot’s limbs aren’t in contact with the environment, for instance the
leg of the flying foot during walking, or when the robot picks up an object and has the task to move it
somewhere. In these situations force control is an advantage to better control the movement and deal
with unexpected contact without damaging the robot or the conficting body, but position control is crucial
so that the desired pose is achieved, which translates to doing the heel strike in the correct spot, or
putting the gripped object in the required position in the examples just given.
In these situations, although there is no contact force, there is still force to be applied caused by the
inertial load of the robotic limbs and/or carried object(if any). The output position can be controlled with a
feedback loop as figure 3.14 illustrates. Remember that we are using position sensors to calculate force,
so to control the output position it’s simpler to do a feedback loop than if we used an extensometer(then
an aditional position sensor had to be included).
To derive the transfer function of this feedback loop we look back at the transfer function of the inertial
mass derived previously and recalled here as equation 3.16. The expression that relates X1 and the
input of the system is that of equation 3.17
X2
X1=
K
ms2 + bs+K(3.16)
38
X1 =Kp
s(X2d −X2) (3.17)
Combining equations 3.6 and 3.17 the transfer function of the closed loop position control system
results which is expressed in equation 3.18. As expected it’s a third degree system, with two poles from
the mass and one pole from the ideal motor model.
X2
X2d=
KKp
ms3 + bs2 +Ks+KKp(3.18)
In the limit when the spring constant is set to infinity, the system reduces to a simple first order
position control system which is represented in equation 3.19.
X2
X2d=
Kp
s+Kp(3.19)
In this case, it’s always best to have the highest possible spring constant because the stiffer the
spring, the faster the system will be able to respond and settle to new position references and deviations
without major oscillations. A compromise has to be made so that position control is reasonable but the
actuator still has good impact tolerance, because although pure position control is possible in series
elastic actuators, the primary goal of SEAs is to have high compliance in case of impact even when
doing pure position control. SEAs are better than stiff force actuators doing force control in terms of
impact tolerance, but a lot worse doing position control than regular stiff actuators. To be able to control
position and still have good impact tolerance, the control software has to check the force in every time
step, because as the compliance is in part virtual(acomplished by the control system), to attenuate the
force of an impact, the control scheme has to change when an impact is sensed or at least the control
action has to take into account and limit the applied force(deppending on the situation).
3.2.6 Analysis with the real motor & hardware
The real motor has more complex dynamics than the model used so far, and analysing the actuator
with the real motor dynamics is fundamental to understand the capabilities of the SEA built arround
the AX-12 platform. The variables that affect the performance of the SEA the most are motor perfor-
mance(maximum speed, torque, and acceleration), the sample rate, and the spring stiffness. Stepping
back and looking at these variables from a systemic point of view, in this project the stock motor is used
so increasing the performance of the motor in the servos isn’t an option in this thesis, the hardware and
software of the controllers has been optimized and is now performance capped by the hardware used
and the communication protocol speed, the spring stiffness is ajustable but also has limits. The spring
stiffness on the real case is bounded, the spring can’t be too stiff has to not allow the position sensor to
read the minimum force that has to be read, and it can’t be too soft so that the force application speed
is too slow as analysed before. The analysis from here on will be done for rotational SEA’s as is the
practical case of this thesis.
The position value read by the ATMega8 has resolution of 0.29◦, so if the required minimum force
39

Kmin Kmax
Better impact tolerance Better position tracking
Figure 3.15: Trade off when selecting spring stiffness
reading(force resolution) is mT , the maximum spring stiffness Kmax can be calculated using Hooke’s
law (3.20 on the left), plugging the position resolution and the force resolution expression 3.20 (right)
results.
T = K · θ Kmax =mT
0.29(3.20)
This gives an upper bound for the spring stiffness. A lower bound can also be calculated by knowing
the maximum speed at which force has to be applied. The force aplication speed for SEA’s in the
contact force case(fixed output position) can be expressed as the first time derivative of Hooke’s law,
with θ1 being the output position of the motor, this is expressed in equation 3.21 on the left. If Tmin is
the minimum force application speed and θ1max is the maximum speed of the motor, then the minimum
spring stiffness Kmin can be calculated, and is expressed in equation3.21 on the right.
T = K · θ1 Kmin =Tmin
θ1max
(3.21)
As expected the same analysis can be done for the force acceleration and jerk, and should be done
if such critical requirements are to be met. Further analisys of the motor dynamics and a deeper study in
motor speed and acceleration capabilities would be advisable as these quantities are derivatives of the
position which is what Tiago based his analisys on, and although his model has acceptable behaviour
in position tracking, errors increase when analysing velocity, acceleration and jerk tracking.
So the spring stiffness must be selected between these two values, the exact value in that accept-
able spectrum has to be selected according to the desired impact impedance and position tracking
capabilities. A stiffer spring will be better for position tracking and a softer spring will make the actuator
more compliant in case of impact as figure 3.15 illustrates. The influence of the spring stiffness on the
performance of the actuator on those situations will be now analysed.
Force Tracking
When in pure force control, the block diagram is as figure 3.16 shows, here the Motor block is the real
motor dynamics of section 3.2.3 which also encompasses the gearbox. The transfer function of the
system is thus equation 3.22. In this equation the spring stiffness K and the proportional term of the
PID controller are interchangeable, this means that we can select any spring and adjust the controller to
have good performance, in fact systems with different springs can have the same exact transfer function.
The difference is that with a softer spring the motor has to move at higher speeds to achieve the same
force in the same amount of time, and it will saturate in situations the same system with stiffer spring
wouldn’t. So the difference is that the non linearity will kick in more easily the softer the spring is. Figure
40
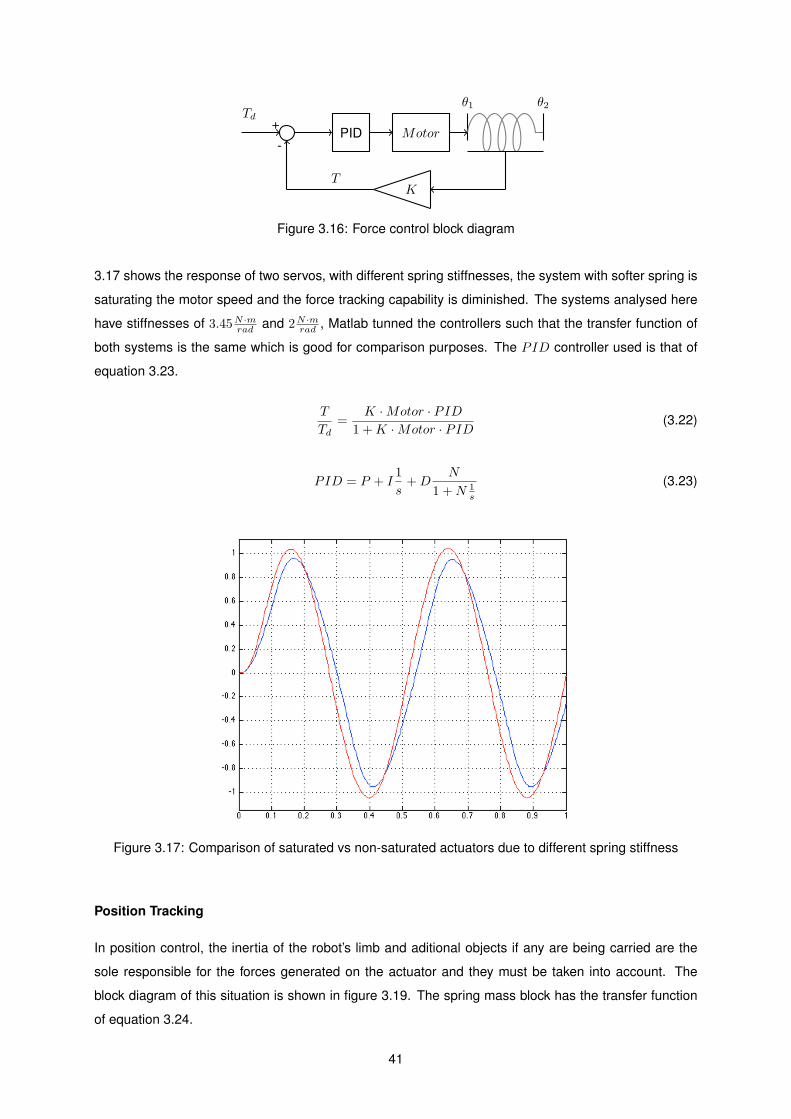
PID Motor
θ1 θ2
K
Td
T
+
-
Figure 3.16: Force control block diagram
3.17 shows the response of two servos, with different spring stiffnesses, the system with softer spring is
saturating the motor speed and the force tracking capability is diminished. The systems analysed here
have stiffnesses of 3.45N ·mrad and 2N ·m
rad , Matlab tunned the controllers such that the transfer function of
both systems is the same which is good for comparison purposes. The PID controller used is that of
equation 3.23.
T
Td=
K ·Motor · PID1 +K ·Motor · PID
(3.22)
PID = P + I1
s+D
N
1 +N 1s
(3.23)
Figure 3.17: Comparison of saturated vs non-saturated actuators due to different spring stiffness
Position Tracking
In position control, the inertia of the robot’s limb and aditional objects if any are being carried are the
sole responsible for the forces generated on the actuator and they must be taken into account. The
block diagram of this situation is shown in figure 3.19. The spring mass block has the transfer function
of equation 3.24.
41
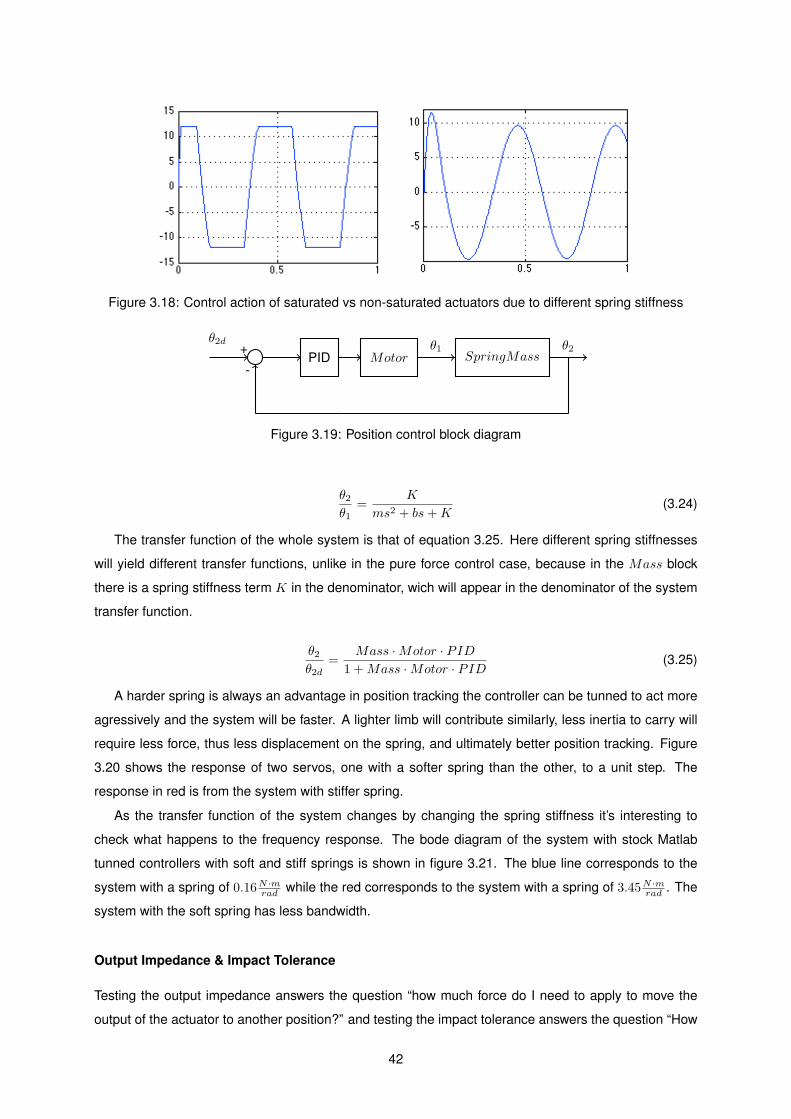
Figure 3.18: Control action of saturated vs non-saturated actuators due to different spring stiffness
PID Motorθ1 θ2
SpringMass
θ2d+
-
Figure 3.19: Position control block diagram
θ2θ1
=K
ms2 + bs+K(3.24)
The transfer function of the whole system is that of equation 3.25. Here different spring stiffnesses
will yield different transfer functions, unlike in the pure force control case, because in the Mass block
there is a spring stiffness term K in the denominator, wich will appear in the denominator of the system
transfer function.
θ2θ2d
=Mass ·Motor · PID
1 +Mass ·Motor · PID(3.25)
A harder spring is always an advantage in position tracking the controller can be tunned to act more
agressively and the system will be faster. A lighter limb will contribute similarly, less inertia to carry will
require less force, thus less displacement on the spring, and ultimately better position tracking. Figure
3.20 shows the response of two servos, one with a softer spring than the other, to a unit step. The
response in red is from the system with stiffer spring.
As the transfer function of the system changes by changing the spring stiffness it’s interesting to
check what happens to the frequency response. The bode diagram of the system with stock Matlab
tunned controllers with soft and stiff springs is shown in figure 3.21. The blue line corresponds to the
system with a spring of 0.16N ·mrad while the red corresponds to the system with a spring of 3.45N ·m
rad . The
system with the soft spring has less bandwidth.
Output Impedance & Impact Tolerance
Testing the output impedance answers the question “how much force do I need to apply to move the
output of the actuator to another position?” and testing the impact tolerance answers the question “How
42

Figure 3.20: Comparison of soft and stiff springs in position tracking
Figure 3.21: Frequency response of soft and stiff springs in position tracking
does the system react when subjected to an impact of certain energy?”.
The output impedance block diagram is that of figure 3.24 and the transfer function is in equation
3.26. It’s easy to see that lowering the spring stiffness K will lower the effect of the output position in the
torque, the effect can be seen in figure 3.22 which is response of two systems, one with stiffer spring
than the other, to the same input. The input function used to do this test is shown in figure 3.23. A stiffer
spring will also cause the motor to saturate with less abrupt position inputs than with a softer spring.
43

Figure 3.22: Comparison of output impedance response of systems with different spring stiffness
Figure 3.23: Input used to compare output impedance
T
θ2=
−K1 +K ·Motor · PID
(3.26)
The impact tolerance was tested by subjecting the system to an impact of an object at a determined
speed. To do that a simulation was done with a certain mass attached to an hipotetical arm of a certain
lenght, with non-zero initial velocity, figure 3.27 illustrates the situation. The block diagram is shown on
figure 3.26 and the transfer function of this system is that of equation 3.31. The force applied by the
actuator on the mass is expressed by equation 3.27 where T is the actuator torque that is expressed by
equation 3.28. Although the mass moves in a straight line, I’ve assummed that the mass is attached to
the arm of the robot and it moves as one with it, but to ease the calculations the component of inertia
parallel to the robotic arm wasn’t considered. Doing the sum of all forces applied on the mass under
these conditions equation 3.30 arrises, and doing the laplace transform we get the transfer function of
the SpringMass block.
44
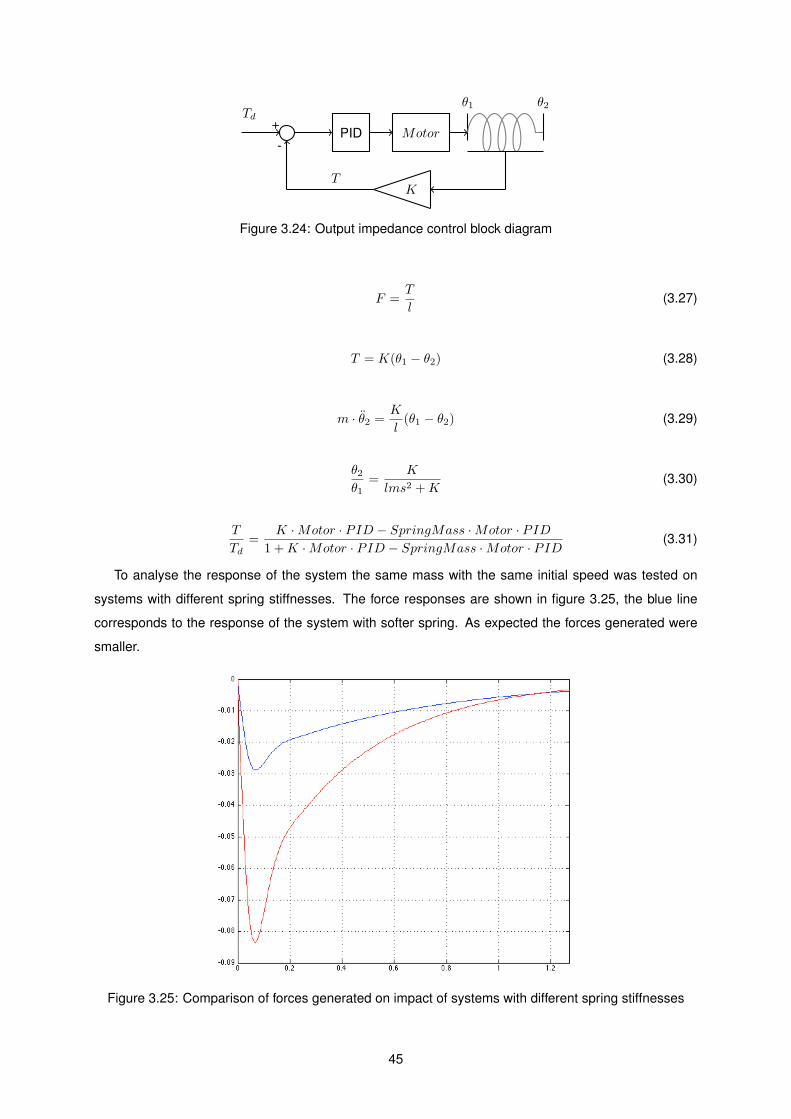
PID Motor
θ1 θ2
K
Td
T
+
-
Figure 3.24: Output impedance control block diagram
F =T
l(3.27)
T = K(θ1 − θ2) (3.28)
m · θ2 =K
l(θ1 − θ2) (3.29)
θ2θ1
=K
lms2 +K(3.30)
T
Td=
K ·Motor · PID − SpringMass ·Motor · PID1 +K ·Motor · PID − SpringMass ·Motor · PID
(3.31)
To analyse the response of the system the same mass with the same initial speed was tested on
systems with different spring stiffnesses. The force responses are shown in figure 3.25, the blue line
corresponds to the response of the system with softer spring. As expected the forces generated were
smaller.
Figure 3.25: Comparison of forces generated on impact of systems with different spring stiffnesses
45
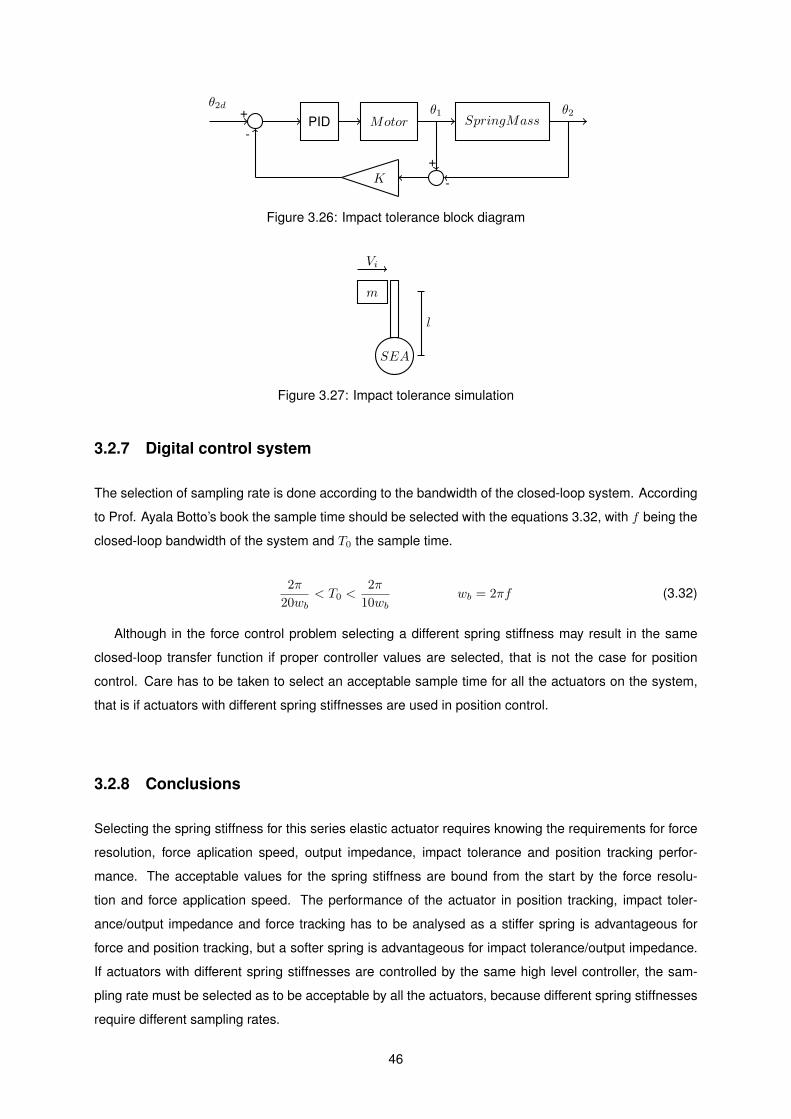
PID Motorθ1 θ2
SpringMass
θ2d
K
+
-
+
-
Figure 3.26: Impact tolerance block diagram
m
SEA
Vi
l
Figure 3.27: Impact tolerance simulation
3.2.7 Digital control system
The selection of sampling rate is done according to the bandwidth of the closed-loop system. According
to Prof. Ayala Botto’s book the sample time should be selected with the equations 3.32, with f being the
closed-loop bandwidth of the system and T0 the sample time.
2π
20wb< T0 <
2π
10wbwb = 2πf (3.32)
Although in the force control problem selecting a different spring stiffness may result in the same
closed-loop transfer function if proper controller values are selected, that is not the case for position
control. Care has to be taken to select an acceptable sample time for all the actuators on the system,
that is if actuators with different spring stiffnesses are used in position control.
3.2.8 Conclusions
Selecting the spring stiffness for this series elastic actuator requires knowing the requirements for force
resolution, force aplication speed, output impedance, impact tolerance and position tracking perfor-
mance. The acceptable values for the spring stiffness are bound from the start by the force resolu-
tion and force application speed. The performance of the actuator in position tracking, impact toler-
ance/output impedance and force tracking has to be analysed as a stiffer spring is advantageous for
force and position tracking, but a softer spring is advantageous for impact tolerance/output impedance.
If actuators with different spring stiffnesses are controlled by the same high level controller, the sam-
pling rate must be selected as to be acceptable by all the actuators, because different spring stiffnesses
require different sampling rates.
46

3.3 Servo Platform
To introduce elasticity in the servo shaft several possibilities were studied, the most important aspect of
the servo modification process was that the servos couldn’t change on the outside so that they would
fit and work on the robot just like they did before. For instance the work done by L.T.Martins et.al [15]
shown on figure 3.28 is not an option.
Figure 3.28: Dynamixel servo with the elastic element on the outside
The inside of a regular hobby servo or the dynamixel servos (figure 3.29) is already somewhat packet
and little space is left to work with, so a compact solution was required to be able to fit in the small
available space. The various options for adding elasticity to the output shaft of the servo were analysed
and will now be presented.
Figure 3.29: Inside the AX-12 Dynamixel servo
47

Using conductive foam
The output shaft of the servo is made “plastic” as described by robotis, plastic materials generally have
some elasticity to them although their mechanical behaviour under tension isn’t perfectly elastic. One of
the ideas was to weaken the shaft to reduce its cross sectional area so that it would deform the minimum
considerable ammount to make the SEA. This way the original shaft could be used and the stiffness
could be controlled by the ammount of material taken from the shaft. To measure the deformation of
the shaft a position sensor taken from another servo couldn’t be used because it wouldn’t be possible
to mount. The only way to mount a potentiometer from another servo is to cut the shaft an mount the
sensor in the middle because it’s a hollow shaft sensor and it’s inside diameter is smaller than that
of the gears at the end of the shaft, and after cutting the shaft it’s very difficult or even impossible
to rebuild it using only it’s own material. A larger hollow shaft sensor was considered but the only
one found that would fit was an iC-MU from iCHaus, this sensor is a chip that reads the position of a
magnetized track with integrated Hall sensors, the track this sensor reads is mountable on the dynamixel
shaft without destroying it. To implement this sensor a greatter effort would be needed because as just
stated, this sensor is a chip and it would require designing and manufacturing a circuit board to hold
it. Furthermore a communication protocol between the sensor and the ATMega microcontroller would
have to be developed. These reasons made the idea of implementing this sensor difficult and not easily
accomplishable during this thesis, and the fact that the material used has a far from linear tension-strain
behaviour and the results wouldn’t be readily usefull made this idea go back in the idea box to remain
just an idea.
Another way to measure the deformation of the shaft is using extensometers, but those need rela-
tively large signal conditioning hardware packages that for their size can’t be considered for this project.
Remember that each servo would have one extensometer, thus for the 12 servos of the legs 12 signal
conditioning boxes would have to be embedded on the robot.
A unconventional approach was tried, that was to use the conductive foam usually found on DIP
packaged chip boxes. The DIP package chips are to be installed on through hole PCBs so they have
considerable feet that need to be protected during shipment. Conductive foam protects the feet from
impact damage and static discharge by grounding all pins of the IC. Several times pressure sensors
were made by the academia and maker community because it’s a very cheap way to sense deformation.
Conductive foam changes it’s conductivity as it deforms, it’s a porous material so when it’s compressed
the density of the material increases and it’s conductivity decreases, the opposite happens when it’s
stretched. To measure the varying conductivity two conductive wires can be pierced into the material,
the deformation can then be measured by measuring the resistance across those wires.
To measure the deformation of the servo shaft with conductive foam the foam needs to be installed
such that deforming the shaft will always provoke measurable deformation on the foam. Since the shaft
had to be weakened, it could have a through cut where the foam could be installed, this way twisting
the shaft would make the foam twist aswell. But to abilitate distinguishing clockwise deformation from
counter-clockwise deformation the cut had to be done in an angle such that the foam is compressed
when the shaft is deformed to one side and stretched when the shaft is deformed to the other. The shaft
48
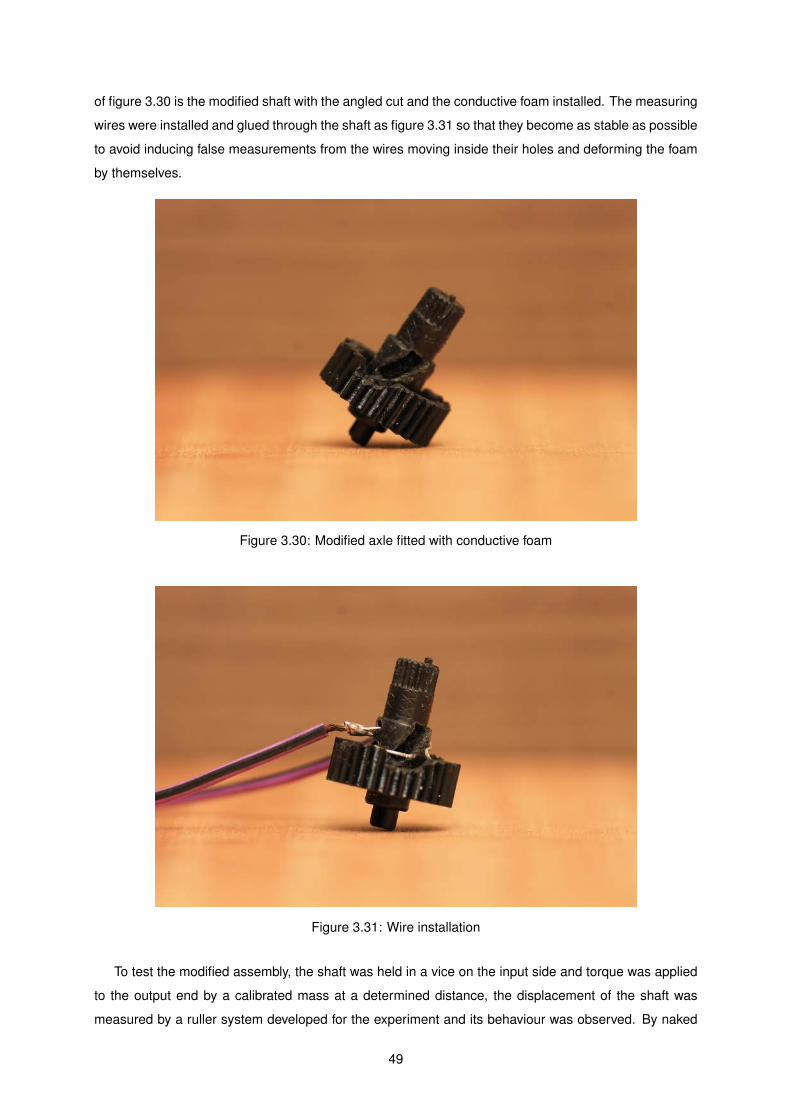
of figure 3.30 is the modified shaft with the angled cut and the conductive foam installed. The measuring
wires were installed and glued through the shaft as figure 3.31 so that they become as stable as possible
to avoid inducing false measurements from the wires moving inside their holes and deforming the foam
by themselves.
Figure 3.30: Modified axle fitted with conductive foam
Figure 3.31: Wire installation
To test the modified assembly, the shaft was held in a vice on the input side and torque was applied
to the output end by a calibrated mass at a determined distance, the displacement of the shaft was
measured by a ruller system developed for the experiment and its behaviour was observed. By naked
49
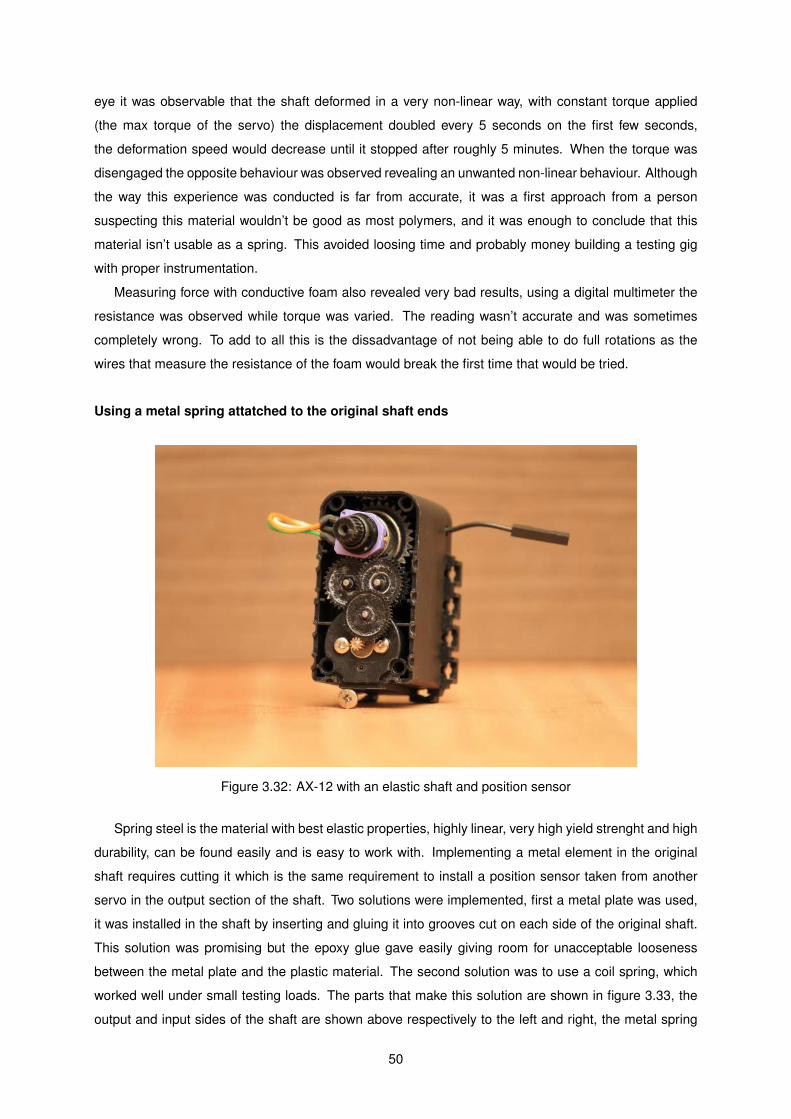
eye it was observable that the shaft deformed in a very non-linear way, with constant torque applied
(the max torque of the servo) the displacement doubled every 5 seconds on the first few seconds,
the deformation speed would decrease until it stopped after roughly 5 minutes. When the torque was
disengaged the opposite behaviour was observed revealing an unwanted non-linear behaviour. Although
the way this experience was conducted is far from accurate, it was a first approach from a person
suspecting this material wouldn’t be good as most polymers, and it was enough to conclude that this
material isn’t usable as a spring. This avoided loosing time and probably money building a testing gig
with proper instrumentation.
Measuring force with conductive foam also revealed very bad results, using a digital multimeter the
resistance was observed while torque was varied. The reading wasn’t accurate and was sometimes
completely wrong. To add to all this is the dissadvantage of not being able to do full rotations as the
wires that measure the resistance of the foam would break the first time that would be tried.
Using a metal spring attatched to the original shaft ends
Figure 3.32: AX-12 with an elastic shaft and position sensor
Spring steel is the material with best elastic properties, highly linear, very high yield strenght and high
durability, can be found easily and is easy to work with. Implementing a metal element in the original
shaft requires cutting it which is the same requirement to install a position sensor taken from another
servo in the output section of the shaft. Two solutions were implemented, first a metal plate was used,
it was installed in the shaft by inserting and gluing it into grooves cut on each side of the original shaft.
This solution was promising but the epoxy glue gave easily giving room for unacceptable looseness
between the metal plate and the plastic material. The second solution was to use a coil spring, which
worked well under small testing loads. The parts that make this solution are shown in figure 3.33, the
output and input sides of the shaft are shown above respectively to the left and right, the metal spring
50
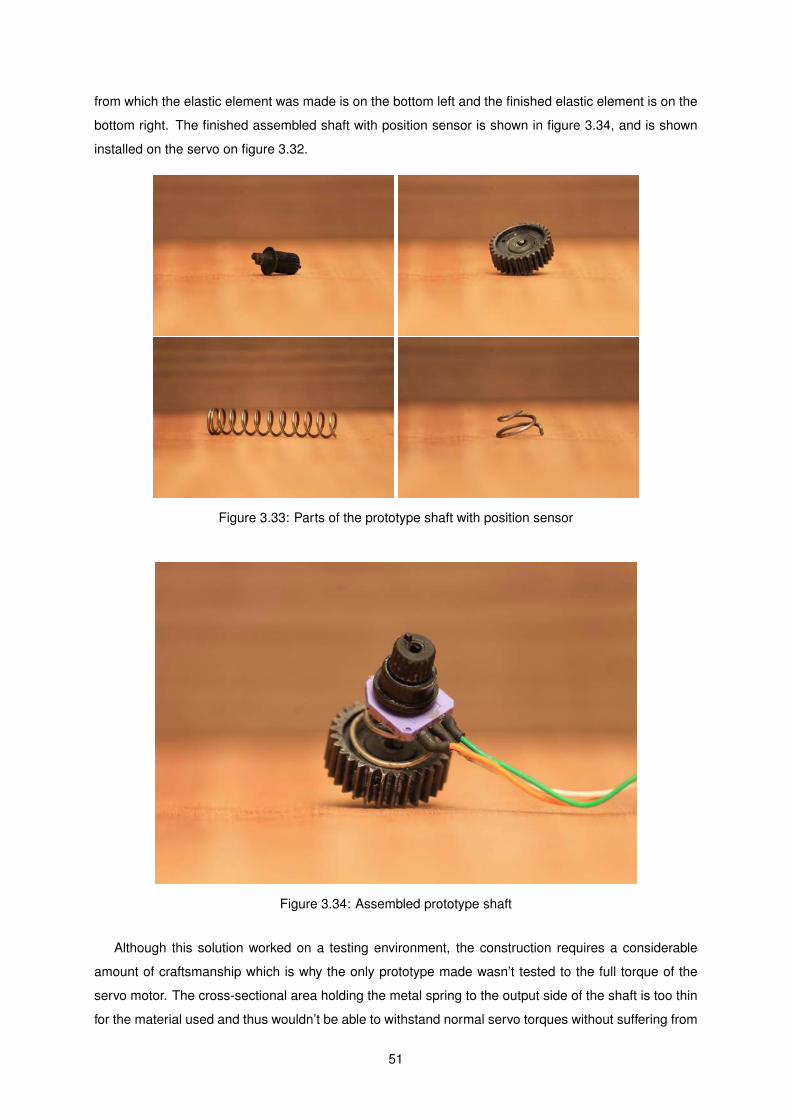
from which the elastic element was made is on the bottom left and the finished elastic element is on the
bottom right. The finished assembled shaft with position sensor is shown in figure 3.34, and is shown
installed on the servo on figure 3.32.
Figure 3.33: Parts of the prototype shaft with position sensor
Figure 3.34: Assembled prototype shaft
Although this solution worked on a testing environment, the construction requires a considerable
amount of craftsmanship which is why the only prototype made wasn’t tested to the full torque of the
servo motor. The cross-sectional area holding the metal spring to the output side of the shaft is too thin
for the material used and thus wouldn’t be able to withstand normal servo torques without suffering from
51
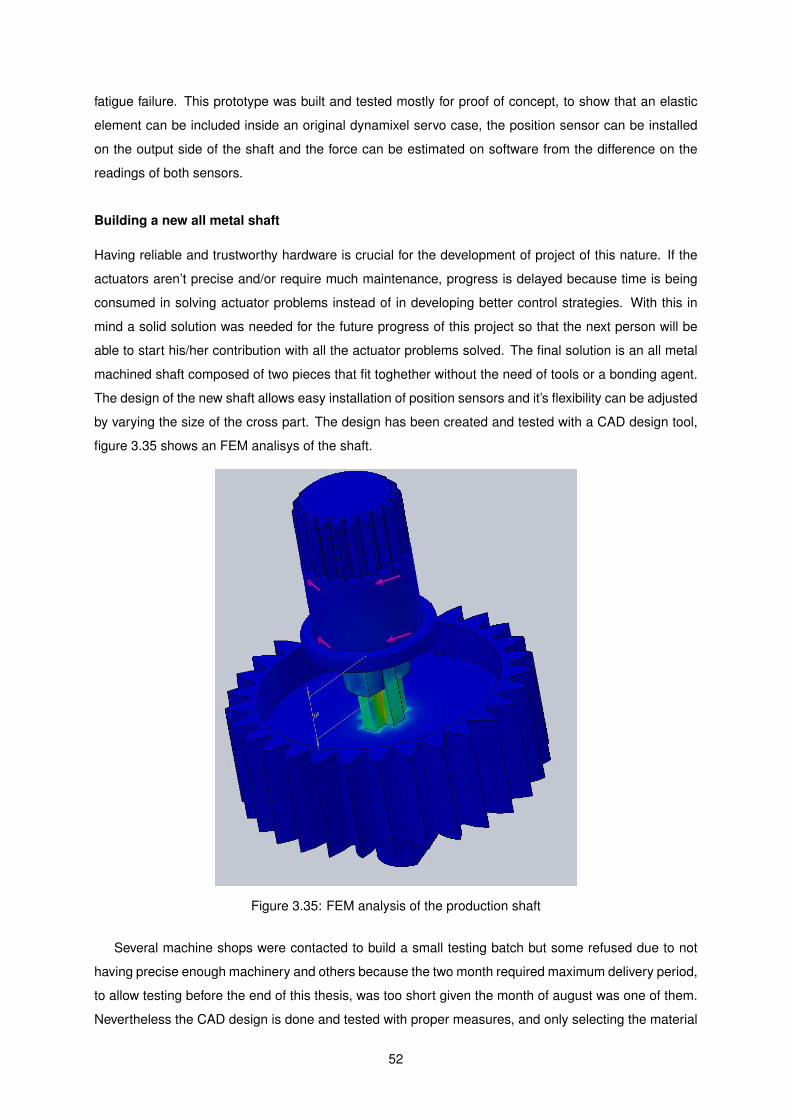
fatigue failure. This prototype was built and tested mostly for proof of concept, to show that an elastic
element can be included inside an original dynamixel servo case, the position sensor can be installed
on the output side of the shaft and the force can be estimated on software from the difference on the
readings of both sensors.
Building a new all metal shaft
Having reliable and trustworthy hardware is crucial for the development of project of this nature. If the
actuators aren’t precise and/or require much maintenance, progress is delayed because time is being
consumed in solving actuator problems instead of in developing better control strategies. With this in
mind a solid solution was needed for the future progress of this project so that the next person will be
able to start his/her contribution with all the actuator problems solved. The final solution is an all metal
machined shaft composed of two pieces that fit toghether without the need of tools or a bonding agent.
The design of the new shaft allows easy installation of position sensors and it’s flexibility can be adjusted
by varying the size of the cross part. The design has been created and tested with a CAD design tool,
figure 3.35 shows an FEM analisys of the shaft.
Figure 3.35: FEM analysis of the production shaft
Several machine shops were contacted to build a small testing batch but some refused due to not
having precise enough machinery and others because the two month required maximum delivery period,
to allow testing before the end of this thesis, was too short given the month of august was one of them.
Nevertheless the CAD design is done and tested with proper measures, and only selecting the material
52

and the size of the cross section of the shaft is left to do before ordering a batch. The material selection
wasn’t done because the availability of good steels for the elastic part may be limited and expensive as
the selected steel would have to be adequate for a spring. Not every shop has the availability to make
parts like this, a specific material may be hard to find at a good price and some materials are harder
to work with than others which would result in different prices at the machine shop. Thus the material
selection was left to be done when machine shops and steel retailers are contacted and the material
that offers the highest quality/price ratio is found. Then the size of the elastic part of the shaft can be
ajusted to get the right spring stiffness. The focus on choosing the steel can be reduced to choosing
a steel that fulfills the spring part requirements, good fatigue strenght specially, because the rest of the
shaft is replacing a part that was made of a weak polymeric material that withstood the stresses without
any problem.
53
54

Chapter 4
Conclusions
In this thesis a whole new robot control framework was developed, it makes use of parallel processing
and acheives high performance by distributing the tasks throughout various computational agents. The
distribution of the tasks was done such that the data flow and sample-rate of the control system are
optimized. By using of the shelf and already in house hardware components the architecture of the
system was moulded by the capabilities of the components but still allowing to achieve much better
performance than anything previously in this project. A deterministic hard real-time control system with
consistent sample time was achieved with variable sampling frequency of up to 200Hz.
The voltage converter and quad-buffer/line driver was designed, built and tested by me, and revealed
to be reliable with zero failures or faulty data transactions observed. This piece of hardware was needed
because the Dynamixel servos use these chips but they don’t add latency to the communication.
An all new servo software was developed from scratch to replace the old cumbersome software.
The new software relies on internal and external interrupts to time and syncronize the tasks, achieving
deterministic time response from the servos.
The possibilities to modify the AX-12 dynamixel servos to series elastic actuators were exploited and
evaluated. Several options were analysed and the best revealed to be to build an all new metal shaft with
the elastic element built into itself. The performance of the SEA was evaluated and the choice of spring
stiffness was explored, the allowed spring stiffness value is restricted by the precision of the position
sensor and the speed at which force needs to be applied. In between those values a stiffer spring will
give a faster actuator and a softer spring will give a more compliant actuator, the selection must be done
according to the application case after simulations of the working system are done and the requirements
for the actuator are determined.
4.1 Future Work
Left out of this thesis was the testing with the final metal shaft/elastic element without which made it
impossible to test the real performance of the series elastic actuator. The full project for the shaft is
done and ready to be built so that is the next step.
55
In terms of software, although the platform is run-time solid, it is non very easy to program because
the controllers have to be hard coded in C into the software. Building a software bridge between Matlab
and the odroid software would make it easier to program new controllers and make modifications, as
well as reading the log files after test runs.
A single package can be made to accomodate the Odroid, voltage level converter and the clock
microcontroller to easily fit the platform in the robot.
56
Bibliography
[1] An232b-04 data throughput, latency and handshaking, 2006.
www.ftdichip.com/Support/Documents/AppNotes/AN232B-04 DataLatencyFlow.pdf.
[2] Avr523: Migration from atmega8 to atmega8a, 2009. http://www.atmel.com/Images/AVR523.pdf.
[3] Rt patch wiki, 2012. rt.wiki.kernel.org/index.php/Main Page.
[4] The biotac from syntouch, 2015. http://www.syntouchllc.com/Products/BioTac/.
[5] Optimal actuator, 2015. https://biomimetics.mit.edu/research/optimal-actuator.
[6] Top 10 linux and android hacker sbcs of 2015, 2015. www.linux.com/news/embedded-
mobile/mobile-linux/834861-top-10-linux-and-android-based-hacker-sbcs-of-2015.
[7] B. Siciliano L. Villani A. De Santis, V. Lippiello. Advances in Control Theory and Applications,
Lecture Notes in Control and Information Sciences, chapter Human-robot interaction control using
force and vision.
[8] A.J.Ijspeert and J. Kodjabachian. Evolution and development of a central pattern generator for the
swimming of a lamprey. Department of Artificial Intelligence, University of Endinburgh, 1998.
[9] Miguel Ayala Botto. Controlo de Sistemas. IST Press, 2009.
[10] R. Muller et.al. Preparing the leg for ground contact in running: The contribution of feedforward and
visual feedback. The Journal of Experimental Biology, 2015.
[11] Francisco Ferreira. Development of a human walking model comprising springs and positive force
feedback to generate stable gait. Master’s thesis, Instituto Superior Tecnico, 2013.
[12] G.A.Pratt. Low impedance walking robots. Oxford Integrative and Comparative Biology, 2002.
[13] K.Althoefer H.Yousefa, M.Boukallela. Tactile sensing for dexterous in-hand manipulation in robotics
- a review. Sensors and Actuators A: Physical, 2011.
[14] H.Herr J.A.Blaya. Adaptive control of a variable-impedance ankle-foot orthosis to assist drop-foot
gait. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2004.
[15] Leandro Tome Martins, Roberta de Mendonca Pretto, Reinhard Gerndt, and Rodrigo
da Silva Guerra. Design of a modular series elastic upgrade to a robotics actuator. 2014.
57
[16] T.Siedel M.Hild and T.Geppert. Design of a passive, bidirectional overrunning clutch for rotary joints
of autonomous robots. Intelligent Robotics and Applications: 4th International Conference,ICIRA
2011, 2011.
[17] M.Laffranchi D.G.Caldwell Nikos G.Tsagarakis, B.Vanderborght. The mechanical design of the new
lower body for the child humanoid robot ’icub’. Intelligent Robots and Systems, 2009.
[18] P.Sardain and G.Bessonnet. Forces acting on a biped robot. center of pressure - zero moment
point. IEEE Transactions on Systems, Man and Cybernetics, 2004.
[19] Tiago Rato. Actuated character - humanoid robots for videogames interaction. Master’s thesis,
Instituto Superior Tecnico, 2012.
[20] David William Robinson. Design and Analysis of Series Elasticity in Closed-loop Actuator Force
Control. PhD thesis, Massachusetts Institute of Technology, 2000.
[21] R.Tedrake M.Wisse S.Collins, A.Ruina. Efficient bipedal robots based on passive-dynamic walkers.
Science Magazine, 2005.
[22] Sangok Seok. Highly Parallelized Control Programming Methodologies using Multicore CPU and
FPGA for Highly Dynamic Multi-DoF Mobile Robots, Applied to the MIT Cheetah. PhD thesis,
Massachusetts Institute of Technology, 2014.
[23] Pedro Teodoro. Humanoid robot - development of a simulation environment of an entertainment
humanoid robot. Master’s thesis, Instituto Superior Tecnico, 2007.
[24] M.Panne T.Geijtenbeek and A.F.Stappen. Flexible muscle-based locomotion for bipedal creatures.
ACM Transactions on Graphics, 2013.
58
Appendix A
Work done on the previous platform
Although a new software platform was developed, work has been done on the previous platform before
deciding to build the new one. The previous software was modified to read the second position sensor,
do force control, and feedback the force value through the UART port. The communication protocol
also received modifications to exchange force and position values with the high level controller more
efficiently.
The old software had a Windows program written in C# that allowed communication with a computer
and tunning of the controller parameters. This software was also modified to allow communication with
the modified software and allow sending force control commands. A printscreen of the modified version
is on figure A.1
In the end this work only served to understand the issues of the old platform.
Figure A.1: Modified windows program to work with force control
59
Appendix B
Technical Drawing of the new shaft
60
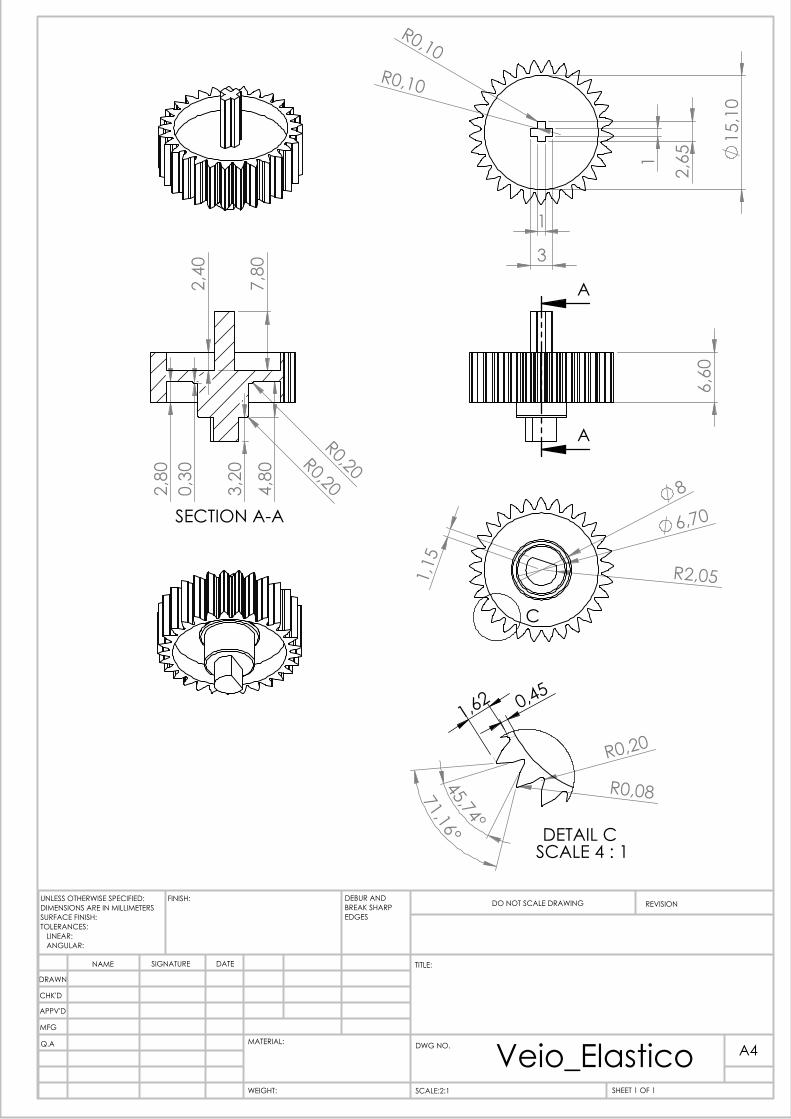
6,6
0
A
A
15
,10
2,6
5
1
1
3
R0,10 R0,10
6,70 8
R2,05 1,1
5
C
7,8
0
2,4
0
2,8
0 0
,30
4,8
0
3,2
0
R0,20 R0,20
SECTION A-A
45,74°
71,16°
R0,08
R0,20 1,62 0,45
DETAIL C SCALE 4 : 1
Veio_ElasticoWEIGHT:
A4
SHEET 1 OF 1SCALE:2:1
DWG NO.
TITLE:
REVISIONDO NOT SCALE DRAWING
MATERIAL:
DATESIGNATURENAME
DEBUR AND BREAK SHARP EDGES
FINISH:UNLESS OTHERWISE SPECIFIED:DIMENSIONS ARE IN MILLIMETERSSURFACE FINISH:TOLERANCES: LINEAR: ANGULAR:
Q.A
MFG
APPV'D
CHK'D
DRAWN

8,
40
8
6,
80
92°
5,
60 3,40
R2,90 R0,05
0,2
0 R0,20 0
,80
4,9
0
4,2
0 40°
R0,10
0,1
0
R2
8,
40
1
1
R0,10
R0,10 1,1
5
Veio_SaidaWEIGHT:
A4
SHEET 1 OF 1SCALE:5:1
DWG NO.
TITLE:
REVISIONDO NOT SCALE DRAWING
MATERIAL:
DATESIGNATURENAME
DEBUR AND BREAK SHARP EDGES
FINISH:UNLESS OTHERWISE SPECIFIED:DIMENSIONS ARE IN MILLIMETERSSURFACE FINISH:TOLERANCES: LINEAR: ANGULAR:
Q.A
MFG
APPV'D
CHK'D
DRAWN
![Design of Robust and Force Sensitive Actuator for …Abstract Model of Backdrivable Actuators • Series Elastic Actuator J 1 J 2 K=[k ij] J 1 J 2 D=[d ij] •Electro‐Hydrostatic](https://static.fdocuments.us/doc/165x107/5eb646a14e8f5d0b3741a88f/design-of-robust-and-force-sensitive-actuator-for-abstract-model-of-backdrivable.jpg)







![Soft Robotics: Self-walking, self-learning bipedal robot · Actuator” [MPA] is a soft pneumatic actuator utilizing the elastic properties of rubber. The MPA has been initially developed](https://static.fdocuments.us/doc/165x107/5f8263a0e309ac562212bef3/soft-robotics-self-walking-self-learning-bipedal-actuatora-mpa-is-a-soft-pneumatic.jpg)









