Generator Stator Rewinds: A Review of the Stator Rewind Process

2001 IEEE PES WINTER MEETINGJanuary 28 - February 1, COLUMBUS
Panel Session on DATA FORMODELING SYSTEMS TRANSIENTS
Determination of Rotating MachineParameter for Transients Simulations
Juan A. MARTINEZ
Universitat Politècnica de CatalunyaBarcelona - SPAIN

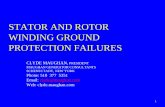
BLOCK DIAGRAM

REPRESENTATION OF SYNCHRONOUS GENERATORS
GENERATORS GROUP I : 0.1 Hz ÷ 3 kHz GROUP II : 50/60 Hz ÷ 20 kHz GROUP III : 10 kHz ÷ 3 MHz GROUP IV : 100 kHz ÷ 50 MHz
Representation
Detailed representation ofelectrical and mechanicalparts, includingrepresentation of saturationand control of excitation
Transition fromsubtransient to transientand to synchronousimpedance
Very important if close tolocation of switching event
Important only for decay ofshort circuit current, otherwisenegligible
Negligible Negligible
Voltage control Very important Negligible Negligible Negligible
Speed control Important Negligible Negligible Negligible
Frequency-dependentparameters
Very important Important Negligible Negligible
Capacitance Negligible Important Very important Very important
L = inductance L" = subtransient inductance Cs = surge capacitanceR = resistance E = electromotoric force Z = impedance measured at terminalsC = capacitance f = frequency

SCOPE
!! Representation of rotating machines from terminals
!! Determination of electrical parameters
!! Group I ( 0.3 Hz - 3 kHz) transients
!! Contents
* AC machines (synchronous, induction)
* Mathematical representation - Equivalent circuits
* Off-line test procedures (time/frequency domain)

SYNCHRONOUS MACHINE
DIAGRAM OF THE ELECTRICAL PART

[v] [R][i] ddt
[ë]
[ë] [L] [i]
Electrical part equations
[v] vector of voltages[i] vector of currents[ë] vector of fluxes[R] diagonal matrix of winding resistances[L] matrix of self and mutual inductances

Transformation of electricalvariables
(Add zero-sequence circuit)

Equivalent circuits
d-axis circuit
q-axis circuit

SYNCHRONOUS MACHINE MODELS (IEEE Std. 1110)
Q-AXISD-AXIS
NO DAMPERCIRCUIT
ONE DAMPERCIRCUIT
TWO DAMPERCIRCUITS
THREE DAMPERCIRCUITS
FIELD CIRCUIT
ONLYMODEL 1.0 MODEL 1.1
FIELD CIRCUIT+ONE DAMPER
CIRCUITMODEL 2.1 MODEL 2.2 MODEL 2.3
FIELD CIRCUIT+TWO DAMPER
CIRCUITSMODEL 3.3

SM PARAMETER IDENTIFICATION PROCEDURES
!! IEEE Std. 115 : Test procedures for SMIEC 34-4
!! Time-domain off-line tests (short-circuit test)
!! Frequency-domain off-line tests (SSFR)
!! Only two circuits per rotor axis
!! For a more general procedure see I.M. Canay,"Modelling of alternating-current machines havingmultiple rotor circuits", IEEE Trans. on EnergyConversion, vol. 8, no. 2, pp. 280-296, June 1993
!! Saturation

Synchronous machine parameters
Parameters MeasurementsLd, Lq Synchronous inductancesLf, Lg Field winding inductancesLkd, Lkq Damper winding inductancesLaf, Lakd, Lfkd d-axis mutual inductancesLag, Lakq, Lgkq q-axis mutual inductancesRa Armature resistanceRf, Rg Field winding resistancesRkd, Rkq Damper winding resistancesL0 Zero sequence inductance
Ld, Lq Synchronous inductancesL’d, L’q Transient inductancesL”d, L”q Subtransient inductancesô’d, ô’q Transient sc time constantsô”d, ô”q Subtransient sc time constantsRa Armature resistanceLl Armature leakage inductanceL0 Zero sequence inductance
! If Laf = Lakd = Lfkd and Lag = Lakq = Lqkq the above measurementsare enough
! If Laf ÖÖ Lakd a new measurement, Lc (characteristic impedance), is needed

1
Ld(s)
1
Ld
1
L d
1
Ld
s ô d
1 s ô d
1
L d
1
L d
s ô d
1 s ô d
ô d0 ô d0
Ld
L d
ô d 1Ld
L d
Ld
L d
ô d
ô d0 ô d0 ô d ô d
Ld
L d
Lc Ll
Lmd Lfkdl
Lmd Lfkdl
Direct axis basic definitions

LL L
L L
L
Lfldc dc
dc dc
md
dc
=−
'
'
2
LL L
L L
L
Lkdldc dc
dc dc
md
dc
=−
' "
' "
2
L L Lmd d l= − L L Ldc d c= − L L Ldc d c" "= −
RL
ffl
d
=ωτ 1
RL
kdkdl
d
=ωτ 2
τ τ τ τdo dod
dd
d
d
d
dd
L
L
L
L
L
L' "
''
' ""+ = + − +
1 τ τ τ τdo do d dd
d
L
L' " ' "
"=
( ) ( )τ τ τ τ τ τd d d dd
dcdo do
c
dc
L
L
L
L1 2+ = + − +' " ' " τ τ τ τd d do dodc
dc
L
L1 2 = ' ""
L LL
L
dc dcd d
do dodc
dcd
'
' ""
=−
+ − +
τ τ
τ τ τ
1 2
21( )L L L
L
Lfkdl c lmd
dc
= −
d-axis data conversion procedure

STANDSTILL FREQUENCY RESPONSE TESTING
!! Aim : Accurate identification of SM parameters from low-voltage frequency response tests at standstill
!! IEEE Std. 115 : Test procedures for SM
!! Measurable parameters
* d-axis operational impedance Zd(s)
* q-axis operational impedance Zq(s)
* standstill armature to field transfer function sG(s)
* standstill armature to field impedance Zafo(s)

I I Vd s d s= = −2
3
1
3 V Id d= =0 0 V
Iq q= =0 0 V I I Vq s q s= = −2
3
1
3 V
I0 00 0= = V I0 00 0= = V
STANDSTILL FREQUENCY RESPONSE TESTING
Operating conditions Is = Ib = - Ic ; Ia = 0 ; Vs = Vc - Vb
d-axis q-axis

Z se s
i sdd
d e fd
( )( )
( )= −
=
∆∆
∆ 0
Z s Z s R sL sd armd a d( ) ( ) ( )= = +1
2
STANDSTILL FREQUENCY RESPONSE TESTING
Measurement of Zd(s)

Z se s
i sqq
q
( )( )
( )= −
∆
∆
Z s Z s R sL sq armq a q( ) ( ) ( )= = +1
2
STANDSTILL FREQUENCY RESPONSE TESTING
Measurement of Zq(s)

sG si s
i sfd
d e fd
( )( )
( )= −
=
∆
∆∆ 0
∆
∆
∆
∆
i s
i s
i s
i sfd
d
fd
arm
( )
( )
( )
( )=
3
2
STANDSTILL FREQUENCY RESPONSE TESTING
Measurement of sG(s)

Z se s
i safofd
d i fd
( )( )
( )= −
=
∆
∆∆ 0
Z se s
i s
e s
i safofd
d
fd
arm( )
( )
( )
( )
( )= =
∆
∆
∆
∆3
2
STANDSTILL FREQUENCY RESPONSE TESTING
Measurement of Zafo(s)

STANDSTILL FREQUENCY RESPONSE TESTING
Procedure for identification of d-axis parameters
! Use the best available estimate for stator leakage inductance LR
! Ld(0) is the low-frequency limit of Ld(s) [Lad = Ld(0) - LR]
! Find the field to armature turns ratio Nfd/Na
! Calculate the field resistance
! Define an equivalent circuit structure for the direct axis
! Use a fitting technique to find values for the unknown parametersthat produce the best fit for Ld(s) and sG(s)
! Adjust Lad to its unsaturated value Ladu
! Measure the field winding resistance, convert it to the desiredoperating temperature, and refer it to the stator
! Normalize the equivalent circuit elements to per unit values

STANDSTILL FREQUENCY RESPONSE TESTING
Procedure for identification of q-axis parameters
! Use the best available estimate for stator leakage inductance LR
! Lq(0) is the low-frequency limit of Lq(s) [Laq = Lq(0) - LR]
! Define an equivalent circuit structure for the quadrature axis
! Use a fitting technique to find values for the unknown parametersthat produce the best fit for Lq(s)
! Adjust Laq to its unsaturated value Laqu
! Normalize the equivalent circuit elements to per unit values

STANDSTILL FREQUENCY RESPONSE TESTING
!! SSFR testing limitations* effect of eddy current losses on Ra
* standstill measurements made at low currents* resistance in the contact points of damper windings
!! Fitting techniques* Maximum-likehood estimation* Noniterative parameter identification* Network synthesis technique* Vector fitting
!! Several procedures have been proposed to solve somelimitations, see for instance* I.M. Canay, IEEE Trans. on EC, 1993* A. Keyhani & H. Tsai, IEEE Trans. on EC, 1994* D.Y. Park et al., IEEE Trans. on EC, 1998
!! Differences between round rotor and salient polemachines (IEEE PES WM 1997 Panel & IEEE Trans. onEC, 1999)

ON-LINE TESTING
!! Limitations of off-line testing
!! Time-domain and frequency-domain methods
!! On-line tests
* on-line frequency response test
* load rejection test
* large disturbance in the excitation voltage
* small disturbance

INDUCTION MACHINE
!! Equivalent circuit* eddy currents in rotor bars* leakage inductance saturation
!! IEEE Std 112 : Standard Test Procedure for PolyphaseInduction Motors and Generators
!! Parameter estimation tests* on/off line tests* standstill time-domain test* standstill frequency response
!! Procedure based on standard specification data* G.J. Rogers & D. Shirmohamadi, IEEE Trans. on EC, 1987* EMTP Universal Machine Module

INDUCTION MACHINE EQUIVALENT CIRCUIT
!! IM performance dominated by the stator and rotor totalleakage reactances and the rotor resistance
!! These quantities are not constant but vary with slip* rotor resistance variation is caused by eddy currents* leakage inductance variation is caused by eddy currents and by magnetic saturation of the leakage flux path

Equivalent circuit - Deep bar or doublecage rotor winding
EQUIVALENT CIRCUIT
SIMPLIFIED EQUIVALENT CIRCUIT

MODIFIED EQUIVALENT CIRCUIT
Standard Specification Data Equivalent circuit parameters
Rated voltage, Vred
Full load specification* Efficiency, ç* Power factor, cosÖ* Slip, sStarting specification* Current, Ist
* Torque, Tst
Maximum torque, Tmax
Design ratio, m
Stator resistance, Rs
Stator leakage reactance, Xs
Magnetizing reactance, Xm
Rotor leakage reactance, Xr
Rotor primary resistance, R1
Rotor secundary resistance, R2
Rotor secondary leakage reactance, X2

DATA CONVERSION PROCEDURE

( )T r I
TT
T
T s
s
mr r
x
DF I I
DF I I
I
I
x x DF x
st st st
ratst st s
sat
sat
sat
tl to ts
=
= =−
⋅
=+
= <
= +
>
=
= + ⋅
−
2
1 2
2
1
1
1
2 2
2
ωφ
πα
α
α
( )
cos
sin( )
sin
Full load specifications
rs
rs
s
xs
s r
m
=−−
=−
=−
cos( ) cos
( ) sin
' '
'
φη η
φ
ηφ
1
1 1
1
Starting specifications Basic relationships
r r TI
I s
r r m r m rr r
r r
xr r
m
xV
Ir r V pu
xV
Ir r
xx x
DF DFx
x DF x DF
DF
st r rats
st
st rr
r
tlss
sts st s
tlred
reds st
tstl tls
sto
tls tl s
=
= + − =−
=+
=
− + =
=
− +
=−−
=⋅ − ⋅
2 2
12 2
21
1
21 2
22
2
22
2
2
2 2
1
1
cos
( )
( )
( )
φ
2
1
222 1
2
−
= = −+
= =
DF
xx
x x rr
r
m
m
x xx
s
soto
ro so r
ss rsts

CONCLUSIONS
!! A significant activity has been made during the last 20years to deduce rotating machine parameters fromtest measurements
!! Only machine models for low frequency and switchingtransients have been analyzed, in all cases consideringa terminal machine model
!! EMTP users can take advantage of different conversionprocedures to obtain the machine parameters for themost adequate model
!! However, very few data conversion procedures are currently implemented in transients tools