Detection and localization of hidden radioactive …tlzhang/wan2012.pdfAnn Oper Res (2012)...
18
Ann Oper Res (2012) 192:87–104 DOI 10.1007/s10479-010-0805-z Detection and localization of hidden radioactive sources with spatial statistical method Hong Wan · Tonglin Zhang · Yu Zhu Published online: 10 November 2010 © Springer Science+Business Media, LLC 2010 Abstract The detection of radioactive materials has become a critical issue for environ- mental services, public health, and national security. This paper proposes a spatial statistical method to detect and localize a hidden radioactive source. Based on a detection system of multiple radiation detectors, the statistical model assumes that the counts of radiation par- ticles received by those detectors are spatially distributed of Poisson distribution, and each comprises a signal and a background. By considering the physical law of signal degradation with distance, the paper provides a numerical method to compute the maximum likelihood estimates of the strength and location of the source. Based on these estimates, a likelihood ratio statistic is used to test the existence of the source. Because of the special properties of the model, the test statistic does not converge asymptotically to the standard chi-square distribution. Thus a bootstrap method is proposed to compute the p-value in the test. The simulation results show that the proposed method is efficient for detecting and localizing the hidden radioactive source. Keywords Bootstrap · Fisher information · Likelihood ratio statistic · Maximum likelihood estimation · Poisson processes · Signal plus background model H. Wan ( ) Department of Industrial Engineering, Purdue University, 315 N. Grant Street, West Lafayette, IN 47907-3023, USA e-mail: [email protected] T. Zhang · Y. Zhu Department of Statistics, Purdue University, 250 North University Street, West Lafayette, IN 47907-2066, USA T. Zhang e-mail: [email protected] Y. Zhu e-mail: [email protected]
Transcript of Detection and localization of hidden radioactive …tlzhang/wan2012.pdfAnn Oper Res (2012)...

Ann Oper Res (2012) 192:87–104DOI 10.1007/s10479-010-0805-z
Detection and localization of hidden radioactive sourceswith spatial statistical method
Hong Wan · Tonglin Zhang · Yu Zhu
Published online: 10 November 2010© Springer Science+Business Media, LLC 2010
Abstract The detection of radioactive materials has become a critical issue for environ-mental services, public health, and national security. This paper proposes a spatial statisticalmethod to detect and localize a hidden radioactive source. Based on a detection system ofmultiple radiation detectors, the statistical model assumes that the counts of radiation par-ticles received by those detectors are spatially distributed of Poisson distribution, and eachcomprises a signal and a background. By considering the physical law of signal degradationwith distance, the paper provides a numerical method to compute the maximum likelihoodestimates of the strength and location of the source. Based on these estimates, a likelihoodratio statistic is used to test the existence of the source. Because of the special propertiesof the model, the test statistic does not converge asymptotically to the standard chi-squaredistribution. Thus a bootstrap method is proposed to compute the p-value in the test. Thesimulation results show that the proposed method is efficient for detecting and localizing thehidden radioactive source.
Keywords Bootstrap · Fisher information · Likelihood ratio statistic · Maximumlikelihood estimation · Poisson processes · Signal plus background model
H. Wan (�)Department of Industrial Engineering, Purdue University, 315 N. Grant Street, West Lafayette,IN 47907-3023, USAe-mail: [email protected]
T. Zhang · Y. ZhuDepartment of Statistics, Purdue University, 250 North University Street, West Lafayette,IN 47907-2066, USA
T. Zhange-mail: [email protected]
Y. Zhue-mail: [email protected]

88 Ann Oper Res (2012) 192:87–104
1 Introduction
Radioactive materials, also called radioactive isotopes or radioisotopes, contain specialatoms with different numbers of protons or neutrons from usual atoms. These special atomscontain nuclei that decay and emit alpha particles, beta particles, or gamma rays until theisotope reaches stability. Since their discovery, radioactive materials have significantly ben-efited the society. Examples include the application of X-rays and nuclear energy. However,these materials can also impose great threats to public. In recent years, the detection of ra-dioactive materials has become a critical issue for environmental services, public health, andnational security. Here we give some examples.
Example 1 (Radon decay source detection) Radon is a colorless, odorless, and tastelessradioactive gas formed during the natural breakdown of radium, thoron, and uranium in soil,rock, and water. Its connections to various diseases, especially the lung cancer, are widelyknown and well studied. Interested readers can refer to the United Environmental ProtectionAgency (EPA) website for more information (http://www.epa.gov/radon/). Radon can seepinto residences through cracks and holes in the foundation, and it can also contaminate wellwater. Although radon level is now easy to detect in a residence, methods to find the sourceof decay have not been well-studied. Detection and further removal of the decay sourcecan permanently lower the radiation pollution caused by radon and therefore improve theenvironments of nearby residents (Dersch 2004).
Example 2 (Nuclear waste leakage detection) The nuclear power industry creates hundredsof tons of deadly nuclear wastes every year (Drew et al. 2003). These wastes need to betransported to special treatment centers, which can impose potential harm to the health andeconomic well-being of residents living on and near the route (Gawande and Smith 2001).Nuclear fuel and waste contain uranium or other radioactive materials. They are sealed infuel rods that are bundled together into nuclear fuel assemblies. If these materials leak fromthe rods, millions of people will be put at risk over many years because leaking waste canmove past homes, workplaces, recreational areas, schools, and hospitals. A person standingbut one yard from an unshielded, 10-year-old fuel assembly would receive a lethal dose ofradiation in less than three minutes. A thirty-second exposure at the same distance would sig-nificantly increase the risk of cancer and genetic damage. Therefore, it is critical to quicklyand accurately detect and locate any leakage of nuclear waste along the transportation routesof these materials for efficient damage control.
Example 3 (Hidden nuclear weapon detection) The tragedy of September 11th, 2001 hasawakened the US government to the potential catastrophe that terrorist attacks can impose.One of the important risks of such attacks is self-constructed nuclear weapons. Generallyspeaking, all nuclear weapons contain at least several kilograms of fissile material that cansustain a chain reaction. The two fissile materials often used are weapons-grade uranium(WgU) and weapons-grade plutonium (WgPu). All isotopes of uranium and plutonium areradioactive, and the two types of detectable radiation are neutrons and gamma rays. The-oretically, the strength of neutrons or gamma ray radiation is determined by the emissionintensity rate of the weapon’s surface. A good summary of the physical models of the nu-clear weapons can be found in Fetter et al. (1990). Note that the terrorists will diligentlydisguise their weapons before an attack, which makes the detection more challenging. Thefailure to detect the weapon, on the other hand, can cause enormous, even unrecoverablelosses.

Ann Oper Res (2012) 192:87–104 89
The detection and localization of radioactive sources can be treated as a signal detectionproblem. One of the most popular and practical detection methods is to use a single radi-ation detector or a network of them deployed in the area of interest (Brennan et al. 2004).A radiation detector, also known as a particle detector, is a device used to detect, track,and/or identify high-energy particles emitted from radioactive materials, including alphaparticles, beta particles, and gamma rays. In general, the observed radiation counts receivedby detectors can be modeled as a mixture of the signal from the radioactive source and thenatural background radiation. (Sources of the background radiation includes the radionu-clides in soil, rock, and cosmic rays Fetter and Cochran 1990.) This statistical model iswell-known and is called the signal plus background model (Feldman and Cousins 1998;Roe and Woodroofe 1999; Zhang and Woodroofe 2003; Zhang 2006).
In its simplified version, a signal Ys is combined with a background Yb to give the ob-served count Y = Ys + Yb . Suppose Ys and Yb are independent Poisson random variableswith means s and b, respectively, then Y will follow a Poisson distribution with mean b + s.Typically b is assumed known but s is not. Suppose Y = y is observed and consider theproblem of testing the null hypothesis H0 : s = 0 for the nonexistence of the signal againstthe alternative hypothesis H1 : s > 0 for the existence of the signal. Write fb as the prob-ability mass function (PMF) and Fλ as the cumulative distribution function (CDF) of thePoisson distribution with mean λ. Let y0 = y0,α = min{y ′ : Fb(y
′) > 1 − α}. Then, the clas-sical uniformly most powerful (UMP) test with significance level α claims the existence ofthe signal for y > y0, and with probability [Fb(y0) − (1 − α)]/fb(y0) claims the existenceof the signal when y = y0 (Lehmann 1986).
The single detector approach discussed above has several drawbacks. First, it requiresan accurate estimate of the background parameter b. Without sufficient knowledge of thisparameter in the interested area, this method is not applicable, since s is not estimable.Second, even when existence of the signal is claimed, the method is unable to estimate thelocation or direction of the radiation signal, both of which are important in real applications.Third, the method can provide no information about the strength of the radiation signalbecause the signal intensity received by the detector depends on both the strength of thesignal and the distance between the signal source and the detector.
To overcome these shortcomings, we propose a spatial statistical detection method basedon multiple radiation detectors. Previous work on signal detection with sensor networkscan be categorized into two groups of methods, one based on decision fusion and theother on value fusion. In decision fusion, each sensor makes its own binary decision, andthe network will then make a consensus by fusing all decisions (Brennan et al. 2004;Chong and Kumar 2003; Katenka et al. 2008). In value fusion, the sensor collects measure-ments, and the network will make a decision by fusing the collected values. Our approachbelongs to the value fusion category. Because the signal weakens when it moves away froma radioactive source, the signals received by detectors at different locations can be differ-ent. Spatial statistics in this case can be a powerful tool for detecting and localizing theradioactive source. In our paper, we compare our proposed method with two popular ex-isting spatial statistical methods. In the first of these two, Diggle et al. (1997) have usedthe likelihood ratio-based statistic for detecting disease cluster over a geographical area,which shares some similar properties of the problem discussed in this paper. However, theirmethod assumes that the location of the disease cluster (equivalent to our source location)is known, which is unrealistic in our problem. In the second method, Kulldorff (1997) haveused the scan statistic for detecting disease cluster, which also share some similar propertiesof the problem discussed in this paper. This method was originally designed for Poisson orbinomial data and uses a moving circle of varying size to detect a set of clustered regions or

90 Ann Oper Res (2012) 192:87–104
points that are unlikely to happen by chance. However, this method assumes two constantrates of units within and outside of a subset of the study area respectively. Our proposedmethod can be understood as the combination or generalization of these two methods byrelaxing their unpractical assumptions. Compared with past work, our proposed method in-tegrates the physical laws with spatial statistics to improve the sensitivity and efficiency ofdetection. It can decide whether the source exists and simultaneously estimate all unknownparameters, including the background radiation strength per unit area, and, if it does ex-ist, the surface radiation strength and the location of the radioactive source. In the followingsections, we introduce the physical background, discuss the proposed statistical method, andshow representative simulation results.
2 Physical background and proposed statistical method
2.1 Physical law of radiation
Based on the physical law discussed in Fetter et al. (1990), the radiation rate decreasesinversely with the square of the distance between the source and the detector, and the numberof radiation count received by the detector follows a homogeneous Poisson process withintensity rate per time unit equal to
Aeνs
4πr2
where r is the distance between the detector and the radioactive source, A and e are the areaand the efficiency of the detector, respectively, and νs is the surface radiation rate per timeunit of the radioactive source. Suppose the time of the detection period is T , then the totalnumber of counts the detector receives from the source follows a Poisson distribution withexpected value equal to
T Aeνs
4πr2. (1)
The detector also receives radiation from the natural background. We assume that the signaland background are independent. The background radiation count received by a detector isalso assumed to follow a Poisson distribution with intensity rate per time unit equal to
Aeνb,
where A and e are the same as defined in (1) and νb is the background intensity rate perarea unit per time unit. If the duration time of the detection is T , then the count from thebackground radiation follows a Poisson distribution with expected value equal to
T Aeνb. (2)
Therefore, the total number of count received by the detector is the combination of twoindependent Poisson distributions, with expected values given in (1) and (2) respectively,which implies the total number of count at the detector in a T -unit time detection periodfollows a Poisson distribution with expected value equal to
T Aeνs
4πr2+ T Aeνb = T Ae
(νs
4πr2+ νb
). (3)

Ann Oper Res (2012) 192:87–104 91
In (3), the quantities A and e are determined by physical properties of the detector. There-fore, we can assume that they are always known. The signal intensity rate νs is completelydetermined by the radioactive source and is typically unknown. The background intensityrate νb may be known in some cases if there are independent experiments to measure it;otherwise it must also be treated as an unknown parameter. Moreover, because the locationof the radioactive source is unknown, the distance r involved in (3) is also unknown. Thus,the exact 3-dimensional (3-D) coordinates of the radioactive source location should also beconsidered parameters as well.
2.2 Spatial signal plus background model for radioactive source detection
Suppose a nuclear radiation detection system is composed of m radiation detectors that areinstalled at locations a1, . . . ,am respectively, where ai = (ai1, ai2, ai3) ∈ R3, i = 1,2, . . . ,m
are the 3D coordinates of the location of the ith detector. Each detector will record its countof neutrons or gamma rays in a specific period of time. The proposed statistical method willdecide the existence and the location of the potential radioactive source based on the infor-mation collected from all detectors. The detection period is assumed to be the same for alldetectors and is denoted by T (e.g., in seconds). Let Ai be the area (e.g. in square meters)and ei the efficiency (i.e. the percentage of detectability) of the ith detector; and let ξi = Aiei
be the product of the area and the efficiency of the ith detector. The ξi characterizes the de-tection power of the ith detector. Suppose a radioactive source is hidden at an unknownposition a0 = (a01, a02, a03) ∈ R3. Its surface radiation rate is νs ; and the background ra-diation intensity rate is νb (e.g. per second per square meter). The cumulative surface andbackground radiation intensities within the detection period are T νs and T νb , respectively.Denote s0 = T νs/(4π) and b0 = T νb . Then, based on (1), we can write the signal intensityfrom this radioactive source si as
si = T νsξi
4π‖ai − a0‖2= s0ξi
r2i
,
where ri = ‖ai − a0‖ = [∑3j=1(ai1 − a01)
2]1/2 is the Euclidean distance between the sourceand the ith detector. Similarly, based on (2), the background intensity bi is
bi = T νbξi = b0ξi .
Let yi be the total number of neutrons or gamma rays observed by the ith detector. Sinceboth the background and source signal follow Poisson distributions, based on (3), yi willalso follow a Poisson distribution with expected value equal to
E(yi) = λi = ξi
(b0 + s0
r2i
)= ξi
(b0 + s0
‖ai − a0‖2
). (4)
The unknown parameters contained in Model (4) include the (cumulative) radiation signalstrength s0, the 3D location a0, and the (cumulative) background intensity b0. The strengthparameter s0, which is always nonnegative, is determined by the surface radiation intensityrate and the duration of detection period. As s0 → 0, the signal becomes weaker. Whens0 = 0, indicating that there is no radioactive source, Model (4) reduces to a pure backgroundmodel with
λi = ξib0. (5)

92 Ann Oper Res (2012) 192:87–104
To test the null hypothesis of the nonexistence of a radioactive source against the alter-native hypothesis of its existence, we specify our hypotheses as
H0 : s0 = 0 vs. H1 : s0 > 0.
Note that under H0 Model (4) reduces to Model (5). In other words, the location parametera0 is present only under the alternative hypothesis and is absent under the null hypothesis.In this context, the test is nonstandard and the classical loglikelihood ratio test statistic doesnot possess its usual asymptotic chi-square null distribution (Andrews and Ploberger 1995;Davies 1977, 1987).
2.3 Parameter estimation for localization
In this section we derive the maximum likelihood estimates (MLEs) of the unknown para-meter θ = (s0, b0, a01, a02, a03). The loglikelihood function under Model (4) is
�(θ) = �(s0, b0,a0) = −m∑
i=1
log(yi !) +m∑
i=1
yi
[log(ξi) + log
(b0 + s0
r2i
)]
−m∑
i=1
ξi
(b0 + s0
r2i
). (6)
The MLEs of s0, a0 and b0 can be obtained by maximizing the loglikelihood function (6).Because the estimation of parameters cannot be directly computed by the standard fittingmethod of generalized linear models, a new numerical fitting method is necessary. On thebasis of the well-known Newton-Raphson method for optimization (see, for example, Presset al. 1992, p. 348), we propose an iterative numerical fitting procedure to maximize (6).To apply the Newton-Raphson method, we first derive the first- and the second-order partialderivatives of the loglikelihood function, which are given in Appendix A. Then, given agood initial guess θ(0), the MLE of θ can be iteratively computed by the Newton-Raphsonmethod as
θ(k+1) = θ(k) − −1θ(k) (�)∇θ(k) (�),
where θ(k) is the k-th iterative solution to the equation ∇θ (�) = 0 given the data, ∇θ is thegradient and θ is the Hessian matrix of the likelihood function at θ , respectively. Thefollowing proposition facilitates the fitting process.
Proposition 1 For a given a0, the loglikelihood function given by (6) is concave in s0 and b0.
The proof is given in Appendix C. In general, optimization of a general smooth functionis an NP-complete problem (Ausiello et al. 1980b). However, if the function is concave, itbecomes a P problem (Ausiello et al. 1980a). Therefore, Proposition 1 implies that condi-tional on a given a0, the algorithm converges in polynomial computational time. Note thatthe above algorithm to be efficient, the initial guess of θ(0) is critical. By Proposition 1,a good guess of θ0 is equivalent to a good guess of a0. Because the value of the expectedrate E(yi/ξi) = λi/ξi in (4) increases as ‖ai − a0‖ decreases, the observed yi/ξi tends tobe large if a detector is close to the radioactive source a0. Therefore, to find a good initialguess of a0, we use the geographic weight center of the detectors with the largest yi/ξi val-ues. For example, we can find two detectors, at ai1 and ai2, with the largest yi/ξi values

Ann Oper Res (2012) 192:87–104 93
and set the initial guess of a0 at a00 = (ai1 + ai2)/2. We then compute the optimal (s0
0 , b00)
of �(s0, b0,a00) conditioning on a0
0 to obtain our initial guess θ0 = (s00 , b
00,a0
0), which willbe used in the Newtow-Raphson algorithm in the computation of the MLE of θ . While themethod is heuristic, it usually provides a good initial guess of θ(0) in our numerical evalua-tions.
We use the asymptotical normality and Fisher information matrix to calculate the confi-dence bound of θ . The Fisher information matrix can be computed by taking the negativeexpected value of the second-order partial derivative divided by m using (4), and the result isshown in Appendix B. Since the true value of θ is unknown, we approximate the Fisher in-formation matrix I (θ) by its estimate I (θ). Then, for any positive s0, under some regularity,the MLE θ has the following limiting distribution
1√m
(θ − θ)L→ N(0, I−1(θ)), (7)
where the Fisher Information matrix is given in (14) in Appendix B. Therefore, the100(1 − α)% elliptical confidence region for θ can be derived as
C(θ) = {θ : m(θ − θ)′I−1(θ)(θ − θ) ≤ χ2α,5},
where χ2α,k is the upper α quantile of χ2
k distribution.
2.4 Hypothesis testing for detection
We treat the detection of the radioactive source as a hypothesis testing problem with thenull hypothesis as H0 : s0 = 0 and the alternative hypothesis as H1 : s0 > 0. Note that theparameter a0 is absent in the null hypothesis and is present only in the alternative hypothesis.Such a test is nonstandard and the classical test statistics, such as the likelihood ratio testand the Wald test, do not possess their usual asymptotic null distribution and optimalityproperties in this context (Andrews and Ploberger 1995). In this paper, we propose to usethe bootstrap method to compute the p-value of the loglikelihood ratio statistic �:
� = sups0≥0
�(s0, b0,a0) − sups0=0
�(s0, b0,a0),
where the superiors are taken for all possible b0 and a0. The null hypothesis of H0 : s0 = 0is rejected if the value of � is sufficiently large.
To compute the loglikelihood ratio statistic, we need to compute the MLEs of the un-known parameters under both the null and the alternative hypothesis. It is clear under thealternative hypothesis that
sups≥0
�(s0, b0,a0) = �(s0, b0, a0).
Under the null hypothesis H0 : s0 = 0, there is only one unknown parameter b0 and its MLEcan be analytically derived as
b00 =
∑m
i=1 yi∑m
i=1 ξi
,
which gives the loglikelihood ratio statistic as
� =m∑
i=1
yi
[log
(b0 + s0
‖ai − a0‖2
)− log(b0
0)
]−
m∑i=1
ξi
[(b0 + s0
‖ai − a0‖2
)− b0
0
]. (8)

94 Ann Oper Res (2012) 192:87–104
The computation of the p-value of � requires the full specification of its exact or as-ymptotic distribution under the null hypothesis. Because the location parameter a0 is absentwhen s0 = 0, such a test is nonstandard and the likelihood ratio statistic � does not possessits usual χ2 asymptotic null distribution (Andrews and Ploberger 1995). Currently, neitherexact nor asymptotic distribution of the � has been theoretically identified. In this work,we follow the general bootstrapping framework used in the spatial scan statistic to assessthe p-value of the likelihood ratio statistic � (Kulldorff 1997). The bootstrap idea is a sta-tistical realization of the simulation concept to optimize the utilization of limited data: onefits a statistical model to the data and treats the fitted model as true (Efron 1979). The boot-strap algorithm draws samples from the fitted model. This is done many times, each timeproducing a fictional sample from the fitted model. The essential idea of the bootstrap isthat it assumes that the sets of fictional samples can approximate the distribution of the teststatistic. The bootstrap procedure is useful when the exact or asymptotic distributions of astatistic are unknown.
Let y+ = ∑m
i=1 yi and λ+ = ∑m
i=1 λi . Then (y1, . . . , ym) conditional on y+ follows amultinomial distribution with the total count being y+ and the proportion parameter being(λ1/λ+, . . . , λm/λ+). Since λ1, . . . , λm can be estimated by Model (5) under H0, the basicsteps to compute the p-value of λ in a bootstrap procedure are:
Bootstrap for the p-value of �:
(i) Compute the observed value of � based on the observed count y1, . . . , ym by (8).(ii) Obtain the estimated count yi = λi , i = 1, . . . ,m under the null hypothesis of H0 : s0 =
0 by fitting Model (5).(iii) Generate K independent multinomial random variables with total count equal to y+
and the proportion parameter equal to (y1/y+, . . . , ym/y+). Compute the K simulatedvalues of �. These K simulated values of � represent the bootstrap null distributionof λ.
(iv) The bootstrap p-value of � is derived by the rank of the observed value in the combi-nation of the observed and the simulated values divided by (K + 1).
We usually choose K = 999 so that the bootstrap p-value is given in 0.001 increment.This p-value of � can be used to test the significance of the identified source. The nullhypothesis will be rejected if the p-value is less than the significance level (e.g. 0.05).
2.5 Homothetic transformation equivalence
The MLEs of unknown parameters and their estimated variances depend not only on thetrue parameters but also on the network layout of the locations of the detectors. The pro-posed spatial signal plus background approach possesses important properties under homo-thetic transformations with practical implications, which will be discussed in this section.All proofs, except Proposition 2, are given in Appendix C. A network layout consists of thedetection period T , the area and efficiency of the individual detectors, and their locations,which can be written as
L = ((ξ1,a1), . . . , (ξm,am)), ξi > 0,ai ∈ R3, i = 1, . . . ,m.
If all detectors are the same, then all ξis are the same. Define L to be the collection of allpossible layouts. We refer to L as the layout space. The unknown parameter space is thespace of all possible unknown parameters defined as
� = {θ = (s0, b0,a0) ∈ R5 : s0 ≥ 0, b0 > 0,a0 ∈ R3}.

Ann Oper Res (2012) 192:87–104 95
A combination of L ∈ L and θ ∈ �, written as D = L × θ , is referred to as aRadiation-Detection System (RDS). Suppose D and D′ are two RDS’s with parametersθ = (b0, s0,a0) and θ ′ = (b′
0, s′0,a′
0) and layouts L = ((ξ1,a1), . . . , (ξm,am)) and L′ =((ξ ′
1,a′1), . . . , (ξ
′m,a′
m)), respectively. If there exists a positive constant v such that a′i = vai
for i = 0,1, . . . ,m, D and D′ are said to be homothetic to each other with scale factor v;and it is written as D ∼v D′. If D ∼v D′ and further there exists a positive constant u suchthat s ′
0 = s0(v2/u), b′
0 = b0/u, and ξ ′i = uξi , they are said to be equivalent with each other
with scale vector (u, v); and it is written as D �(u,v) D′. Sometimes, we do not specify thescale factor v or scale vector (u, v) and simply write D ∼ D′ or D � D′ when D and D′are homothetic or equivalent, respectively. Denote �D as the likelihood ratio statistic �
under RDS D. The definition of � implies that the statistical property of � is completelydetermined by D.
Proposition 2 Let �D and �′D be the likelihood ratio statistics � under the RDSs D and
D′, respectively. If D � D′, then P (�D ≥ c) = P (�D′ ≥ c) for any c > 0.
Equation (4) directly implies Proposition 2.
Proposition 3 If limb0→∞ s0/√
b0 = γ for some γ > 0, then as b0 → ∞ the loglikelihoodratio statistic � weakly converges to a spatial random field of noncentral chi-square distri-butions, with parameters related only to γ and ai for i = 0,1, . . . ,m.
Propositions 2 and 3 imply the following two corollaries.
Corollary 1 Assume D ∼v D′. If ξ ′ = uξ and limb′0→∞(s ′
0/v2)/
√b′
0/u = limb0→∞ s0/√
b0,then limb0→∞ P (�D ≤ c) = limb0→∞ P (�D′ ≤ c) for any c > 0.
Corollary 1 states an important asymptotic property for homothetic RDS’s. The asymp-totic behavior of the test statistic for an RDS is determined by the ratio of the signalintensity and the square root of the background radiation intensity. Note that s0/
√b0 =
νs
√T /4π
√νb . When T goes to infinity, the ratio will also go to infinity as long as νs > 0
and νb is finite. If the signal background ratio does not change, this corollary indicates that aradioactive source can be effectively detected by the proposed method if the detection periodis long enough. Corollary 1 further implies Corollary 2, which describes the influence of thebackground intensity and detector layout on a required detection period under homothetictransformations.
Corollary 2 Suppose the signal intensity rate per unit time vs , the location of the radioac-tive source a0, and the product of area and efficiency of detection ξi do not change. If thedistances between the detectors are increased by k1 folds and the background intensity rateper unit time is increased by k2 folds, in order to maintain the same power of the likelihoodratio statistic, the required detection period needs to increase for k4
1k2 folds, approximately.
Corollaries 1 and 2 allow us to gain the following insights: (a) if the distance betweendetectors is doubled, then for the same source, the detection period needs to increase 16folds; (b) if more efficient detectors are used and their ξi ’s are all doubled, which can beachieved by doubling either the area or the efficiency of each detector, then the detectionperiod for the same source can be reduced by 50%; (c) if the background radiation rate isdoubled, then the detection period also needs to be doubled; and (d) if the radiation signalrate is doubled, the detection period can be reduced by 75%.

96 Ann Oper Res (2012) 192:87–104
3 Simulation
We investigated the power function of the proposed detection method and the estimationaccuracy of the location of a radioactive source on a 10 × 10 lattice. We used 100 detectors(i.e. m = 100) which are located at the grid points on the lattice. Therefore, the locations ofthe detectors are ai = (ai1, ai2) with ai1 = 1 + (i − 1)/10� and ai2 = i − 10 ∗ (i − 1)/10�,i = 1,2, . . . ,m, where ·� is the function of the integer part. In the simulation, we fixed thelocation of the hidden nuclear radioactive source at (5.5,5.5). Consequently, the distancebetween the radioactive source and the detector at ai is equal to
ri = ‖ai − a0‖ =√
(ai1 − 5.5)2 + (ai2 − 5.5)2.
The above defined two dimensional layout is sufficient to demonstrate the behaviors of theproposed method. The R code of the implementation of the proposed method can be foundon the website http://www.stat.purdue.edu/~tlzhang/nuclear.splus.
We compare the performance of our proposed method with a modified Diggle et al.’smethod and the original Kulldorff’s scan method. The Diggle et al.’s method was originallyproposed to detect spatial disease clusters in relation to a known point source, and the rate ofdisease decrease as the distance to the point source increases (Diggle et al. 1997). Assumingthat a0 is preselected, and the decay of rate is proportional to 1/r2
i , we modified Diggle etal.’s method for detecting nuclear radioactive signals. Note that this method requires the a0
value to be known. In our simulation, we chose four pre-specified values of a0, denoted asa∗
0 , when applying this method: a∗0 = (5.5,5.5) represents the case when the exactly location
of the nuclear radioactive source is accurately known, and the other three values representthe cases of increasing inaccuracy of the pre-specification of the radioactive source location.
The spatial scan statistic assumes that the counts are independent Poisson distributedwith the expected value θiξi , where θi = E(yi/ξi) (which is called the relative risk in thepublic health). The scan statistic is to detect any spatial regions within a cluster C in whichcounts are significantly higher than expected. The test compares the total number of countsyc = ∑
i∈C yi , within C with the total number of counts, yc = ∑i �∈C yi outside of C. Assume
that θi = θc for i ∈ C and θi = θ0 for i �∈ C, and contrast the null hypothesis of H0 : θc = θ0
against the alternative hypothesis of H1 : θc > θ0. Let �C(θ0, θc) be the likelihood ratiostatistic for a given C. Kulldorff’s scan statistic is given by
� = maxC∈C
�C (9)
where C is the collection of candidates of possible spatial clusters. Since the null distributionof � is not analytically tractable, Kulldorff recommends computing the p-value by MonteCarlo simulations.
Compare these two methods with our proposed method, the Diggle et al.’s method as-sumes that the source location is known; and the Kulldorff’s method assumes that the rateis uniformly distributed within and outside of a subset of the study area respectively. Also,Kulldorff’s scan method requires the set of candidates of clusters C is finite. Both are unre-alistic in our problem. In the remainder of this paper, we will display our simulation resultsto compare our proposed method with Diggle et al.’s method and Kulldorff’s scan method.
We independently generated random counts at the detectors following Poisson distribu-tions with expected value equal to
λi = b0 + s0
r2i
= 100 + s0
r2i
, i = 1, . . . ,100. (10)

Ann Oper Res (2012) 192:87–104 97
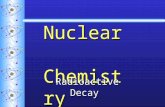
Fig. 1 Power functions of the proposed, scan, and modified Diggle’s methods
In this way, s0 = 0 corresponds to the case that the null hypothesis is true; s0 = 40 corre-sponds to the case of a high radiation rate; and 0 < s0 < 40 corresponds to intermediatecases. In real applications, the larger value of s0 may indicate that the radioactive sourceis stronger, the detection period is longer, the areas of the detectors are larger, or the effi-ciencies of detectors are higher. In the simulation, we treated b0 as an unknown parameter.Therefore we needed to estimate four unknown parameters b0, s0, a01 and a02. After theparameters were estimated, we computed the 1000-run bootstrap p-value of the likelihoodratio statistic �. We claimed the existence of a hidden radioactive source if the p-value wasless than 0.05. The experiment was repeated for 1000 times for each selected value of s0.The power function at each s0 value was assessed by the rejection rate of significance for �.The estimation accuracy of the location of the radioactive source was assessed for all the sig-nificance results by the mean square errors of the Euclidean distance between the estimatedand the designated point locations. Specifically, we define the “Mean Distance” as
MD =∑1000
k=1 ‖a0k− a0‖Ipk<0.05∑1000
k=1 Ipk<0.05
,
where pk is the bootstrap p-value of the kth replication in the simulation for selected s0
value. A smaller MD indicates an accurate localization of the radioactive source.Figure 1 displays the power function of � with selected values of s0. The type I error
probability was displayed by the case in which s0 = 0. As we expected, for the proposedmethod, the power function was close to 0.05 when s0 approached 0. When s0 was less thanor equal to 2.5, the power function was less than 0.1. As s0 became stronger, the powerfunction increased rapidly to almost 1. As we discussed in Proposition 3, the power function

98 Ann Oper Res (2012) 192:87–104
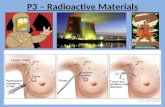
Fig. 2 Mean distances of location specification of proposed and scan methods
of the proposed method is determined by the ratio of s0/√
b0 if b0 is large. Therefore, Fig. 1represents various cases of the power functions for large b0. It can be seen from the plot thatthe power of our proposed method is always higher than Kulldorff’s scan method. It is lowerthan the power of the modified Diggle et al.’s method if a∗
0 is precisely specified, but higherthan the power of the modified Diggle’s method if a∗
0 is deviated from the real location.Figure 2 displays the results of the location specification for our proposed method and
Kulldorff’s scan method. We did not include the Modified Diggle et al.’s method because itassumes a0 is known. It can be seen from the figure that the MD decreased as s0 increased.However in Kulldorff’s scan method, the MD value did not converge to 0 as s0 goes to ∞.This is because the collection of cluster candidates C is finite in Kulldorff’s scan method.In our proposed method, the limit of MD is 0 as s0 goes to ∞. When s0 was moderate(e.g. around 15), the estimated location was less than 0.1 to the true location of the hiddenradioactive source, which indicated that the source had been successfully identified. The-oretically, this can be explained by using the Fisher information matrix displayed by (15).Note that as s0 goes to ∞, I11, I22 and I12 decrease in the order of s−1
0 ; I1,j+2 and I2,j+2 forj = 1,2,3 approach to nonzero constants; and Ij1+2,j2+2 for j1, j2 = 1,2,3 increase in theorder of s0. The asymptotic distribution of θ − θ is determined by the inverse of the Fisherinformation matrix, in which a0 − a0 is mostly determined by the inverse of Ij1+2,j2+2 forj1, j2 = 1,2,3. Therefore as s0 → ∞, the asymptotic variance of a0 − a0 is approximatelyproportional to 1/s0, which indicates that the values of ‖a0 − a0‖ decreases as s0 becomeslarge. The mean distance is thus likely to be small as s0 becomes large.
Note that our simulation results displayed in Figs. 1 and 2 represent a broad class of casesin real applications. More specifically, each case demonstrated above represents a sequenceof networks that are equivalent or homothetic. In other words, results of the simulation can

Ann Oper Res (2012) 192:87–104 99
be extended to cases that have not been displayed. For example, when s0 = 10 the rejectionrate is around 75%. This indicates that the rejection rate is also around 75% when s0 = 20and b0 = 400 or when s0 = 30 and b0 = 900 since all of them satisfy s0/
√b0 = 1. If the dis-
tance between detectors is enlarged by v times, the rejection rate will also be approximately75% if s0v
2/√
b0 = 1.In summary, both the power function and the location estimation perform well for moder-
ate or large strength value. As the strength increases, the power function and the localizationaccuracy both increase rapidly. From the simulation, we are able to conclude that our methodcan effectively handle the uncertainty of the background radiation rate. A hidden radioactivesource can be successfully detected and localized by carefully allocating detectors. Furthersimulation studies (not shown) also suggested that the results of the detection and localiza-tion were not sensitive to the location of the source as long as it was not near the boundaryor outside the network.
4 Conclusion
In this paper, we develop a novel spatial hypothesis testing and estimation method to detectand localize a hidden radioactive source. Compared with the single detector approach, thisnew method has many advantages. First, it uses spatial information of the detector networksto estimate both the strength and location of the radiation signal. Second, it eliminates theneed to estimate background strength in advance. We have demonstrated that the detectionpower of the proposed method is determined by s0/
√b0 (the signal to the square root of
background ratio). Lastly, it allows the possibility of providing a general set-up rule for anetwork detection system, as we have provided some theoretical properties when the detec-tors’ physical properties and the background intensities change.
Note that this framework is general and we present a case here with a specific decayfunction clearly determined by physical law. In future research, we will extend the methodto cases in which the decay-function is not completely known. Also, we will expand our sim-ulation studies to consider irregular detector layouts. Moreover, the p-value of the currentlytest is computed by the Monte-Carlo simulation method. The derivation of the asymptoticproperties of the test statistics will enhance the efficiency of the proposed method.
Acknowledgements We would like to thank the editor and two anonymous reviewers of the Annals ofOperation Research for their insightful comments and suggestions, which have improved the quality of thepaper substantially. This research was supported by the National Science Foundation Grant SES-07-52657(Zhang).
Appendix A: Derivatives
The first and the second order partial derivatives of the loglikelihood function are givenbelow.
The first-order partial derivatives are
∂�
∂s0=
m∑i=1
(yi
b0 + s0/r2i
− ξi
)1
r2i
,
∂�
∂b0=
m∑i=1
(yi
b0 + s0/r2i
− ξi
), (11)

100 Ann Oper Res (2012) 192:87–104
∂�
∂a0j
=m∑
i=1
(yi
b0 + s0/r2i
− ξi
)2s0(aij − a0j )
r4i
, j = 1,2,3.
The second-order partial derivatives are
∂2�
∂s20
= −m∑
i=1
yi
(b0 + s0/r2i )2
1
r4i
,
∂2�
∂b20
= −m∑
i=1
yi
(b0 + s0/r2i )2
,
∂2�
∂a0j1∂a0j2
=m∑
i=1
(yi
b0 + s0/r2i
− ξi
)[8s0(aij1 − a0j1)(aij2 − a0j2)
r6i
− 2s0δj1j2
r4i
]
−m∑
i=1
yi
(b0 + s0/r2i )2
4s20 (aij1 − a0j1)(aij2 − a0j2)
r8i
, j1, j2 = 1,2,3,
(12)
and
∂2�
∂s0∂b0= −
m∑i=1
yi
(b0 + s0/r2i )2
1
r2i
,
∂2�
∂s0∂a0j
=m∑
i=1
(yi
b0 + s0/r2i
− ξi
)2s0(aij − a0j )
r4i
−m∑
i=1
yi
(b0 + s0/r2i )2
2s0(aij − a0j )
r6i
, j = 1,2,3,
∂2�
∂b0∂a0j
= −m∑
i=1
yi
(b0 + s0/r2i )2
2s0(aij − a0j )
r4i
, j = 1,2,3.
(13)
where δj1j2 = 1 if j1 = j2 and δj1j2 = 0 if j1 �= j2.
Appendix B: Fisher information
We computed the Fisher information matrix of (7). The result is below:
I (θ) = − 1
mE[θ(�)] = (Iij )5×5, (14)
where
I11 = I11(θ) = 1
m
m∑i=1
ξi
(b0 + s0/r2i )
1
r4i
,
I22 = I22(θ) = 1
m
m∑i=1
ξi
b0 + s0/r2i
,

Ann Oper Res (2012) 192:87–104 101
Ij1+2,j2+2 = Ij1+2,j2+2(θ) = 1
m
m∑i=1
4ξis20(aij1 − a0j1)(aij2 − a0j2)
(b0 + s0/r2i )r8
i
, j1, j2 = 1,2,3,
(15)
I12 = I12(θ) = 1
m
m∑i=1
ξi
(b0 + s0/r2i )
1
r2i
,
I1,j+2 = I1,j+2(θ) = 1
m
m∑i=1
2ξis0(aij − a0j )
(b0 + s0/r2i )r6
i
, j = 1,2,3,
I2,j+2 = I2,j+2(θ) = 1
m
m∑i=1
2ξis0(aij − a0j )
(b0 + s0/r2i )r4
i
, j = 1,2,3.
Appendix C: Proofs
Proof of Proposition 1 Since both ∂2�/∂s20 and ∂2�/∂b2
0 are negative, and by Cauchy-Schwartz inequality we can prove
[m∑
i=1
yi
(b0 + s0/r2i )2
1
r4i
][m∑
i=1
yi
(b0 + s0/r2i )2
]−
[m∑
i=1
yi
(b0 + s0/r2i )2
1
r2i
]≥ 0,
the Hessian matrix of the likelihood function given by (6) for a given a0 is
( ∂2�
∂s20
∂2�∂s0b0
∂2�∂s0b0
∂2�
b20
)
which is negative definite. Therefore, it is concave in s0 and b0 for a given a0. �
Proof of Proposition 3 We define the Wald statistic
W = supa0∈�⊂R3
(s0a0
σs0a0
)2
where s0a0 is the MLE of s0 conditional on a0, σs0a0is its standard error, and � is the pos-
sible region of a0. Then, � and W are asymptotically equivalent under the null hypothesisH0 : s0 = 0 or the local alternatives H1 : s0 > 0 with limb0→∞ s0/
√b0 = γ for some γ > 0
(Andrews and Ploberger 1995). For a given a0, based on (11), the conditional MLE s0a0 andb0a0 can be derived by jointly solving
�1a0 =m∑
i=1
(yi
b0 + s0/r2i
− ξi
)1
r2i
= 0,
�2a0 =m∑
i=1
(yi
b0 + s0/r2i
− ξi
)= 0.
We equivalently rephrase the case when b0 → ∞ by the following model, in whichb0 = nb → ∞ is implied by n → ∞ for a fixed b. From physical point of view, b can be

102 Ann Oper Res (2012) 192:87–104
understood as the background intensity per unit time and n as the duration time of exposureof the system to the radioactive source. Let b = b0/n, s = s0/n for an integer n. Assume yij
independently follows Poisson distribution with mean
λij = E(yij ) ∼ ξi
(b + s
‖ai − a0‖2
)= ξi
(b + s
r2i
); i = 1, . . . ,m, j = 1, . . . , n.
Define yi = ∑n
j=1 yij . Then, yij are iid for a given i and yi satisfies our original Model (4).The case of b0 → ∞ is equivalent to n → ∞ when both s are b are fixed.
The loglikelihood function based on yij for i = 1, . . . ,m and j = 1, . . . , n is
�n(b, s,a0) = −n∏
j=1
m∏i=1
log(yij !) +n∑
j=1
m∑i=1
yij log
[ξi
(b + s
r2i
)]−
n∑j=1
m∑i=1
ξi
(b + s
r2i
)
= −n∏
j=1
m∏i=1
log(yij !) +m∑
i=1
yi log
[ξi
(b + s
r2i
)]−
m∑i=1
ξi
(nb + ns
r2i
)
= −n∏
j=1
m∏i=1
log(yij !) −m∑
i=1
yi log(n) +m∑
i=1
yi log
[ξi
(b0 + s0
r2i
)]
−m∑
i=1
ξi
(b0 + s0
r2i
).
Therefore conditional on a0, solving the MLE of (b, s) based on �n(b, s,a0) is equivalent tosolving the MLE of (b0, s0) based on �(b0, s0,a0).
This method can be considered as either a Z-estimation method based on the deriva-tives of the conditional loglikelihood function or an M-estimation method based on the con-ditional loglikelihood function. Because the conditional loglikelihood function is concavefrom Proposition 1, the conditional MLE is unique. Suppose the true location is a00 andwrite ri0 = ‖ai − a00‖. For j = 1, . . . , n, let
�1ja0(s, b) =m∑
i=1
(yij
b + s/r2i
− ξi
)1
r2i
= 0,
�2ja0(s, s) =m∑
i=1
(yij
b + s/r2i
− ξi
)= 0.
and
�ja0(s, b) =(
�1ja0(b, s)
�2ja0(b, s)
).
Then, �ja0(s, b) are identically independently distributed and the MLE b0a0 and b0a0 can beequivalently derived by solving �ja0(s, b) = 0 for sa0 and ba0 with s0a0 = nsa0 and b0a0 =nba0 . Let (s, b) be the unique solution of
ψ1a0(s, b) = E(�1ja0(b, s)) =m∑
i=1
(b + s/r2
i0
b + s/r2i
− ξi
)1
r2i
= 0,

Ann Oper Res (2012) 192:87–104 103
ψ2a0(s, b) = E(�2ja0(b, s)) =m∑
i=1
(b + s/r2
i0
b + s/r2i
− ξi
)= 0.
Then,
E(�ja0(s, b)) = 0
and
Vsb = Cov(�ja0(s, b),�ja0(s, b), ) =(
V11 V12
V21 V22
)
with V12 = V21 and
V11 =m∑
i=1
ξi(b + s/r2i0)
(b + s/r2i )2r4
i
,
V22 =m∑
i=1
ξi(b + s/r2i0)
(b + s/r2i )2
,
V12 =m∑
i=1
ξi(bi + s/r2i0)
(b + s/r2i )2r2
i
.
Let
�ja0(s, b) =( ∂�1ja0
∂s
∂�1ja0∂b
∂�2ja0∂s
∂�2ja0∂b
).
Then,
E(�ja0(s, b)) = Vs,b.
Thus as n → ∞, the estimates (s0a0/n, b0a0/n) converges to (s, b) in probability, and
√n
[(s0a0/n
b0a0/n
)−
(s
b
)]L→ N(0,V −1
sb).
The detailed interpretations and derivations of M-estimation and Z-estimation can be foundin textbooks such as Chap. 5 of van der Vaart (1998).
Based on the asymptotical normality of (s0a0/n, b0a0/n), we can conclude that s0a0/σs0s0
weakly converges to a noncentral chi-square distribution with noncentrality γ 2 under thecondition that limb→∞ s0/
√b0 = γ . Then � weakly converges to the maximum of a sto-
chastic random field that consists of noncentral chi-square distributions, which implies theconclusion of the proposition. �
Proof of Corollary 1 Define the detection case D′′ �(1/u,1/v) D′, where D′′ = L′′ × θ ′′
with θ ′′ = (b′′0 , s
′′0 ,a′′
0) and L′′ = ((ξ ′′1 ,a′′
1), . . . , (ξ′′m,a′′
m)). Then, a′′i = (1/v)a′
i = ai fori = 0,1, . . . ,m, b′′
0 = b′0u = b0, ξ ′′
i = ξ ′i /u = ξi , s ′′
0 = s ′0(1/v2)/(1/u) = s ′
0u/v2. FromProposition 2 and Proposition 3, if limb0→∞ s ′′
0 /√
b0 = limb0→∞ s0/√
b0, thenlimb0→∞ P (�D ≤ c) = limb0→∞ P (�D′ ≤ c) for any c > 0. This implies the conclusionof the corollary since s ′′
0 /√
b0 = (s ′0/v
2)/√
b′0/u. �

104 Ann Oper Res (2012) 192:87–104
Proof of Corollary 2 Let the signal rate per unit time and the background rate per unit timebe vs and vb respectively in the original detection D. Suppose the changed detection D′is derived by enlarged ai by k1 times and vb by k2 times. Let the time of detection D beT and the time of detection D′ be T ′. Then, s0 = T νs/(4π), b0 = T νb , s ′
0 = T ′νs/(4π),and b′
0 = T ′k2νb . If we choose T ′ = (T /k2)k1, then D ∼k1 D′. To make the power functionapproximately not change, we need
s ′0
k21
√k2b
′0
≈ s0√b0
⇒ T ′νs/(4π)
k21
√T ′k2νb
≈ T νs/(4π)√T ′νb
⇒ T ′
T≈ k4
1k2. �
References
Andrews, D. W., & Ploberger, W. (1995). Admissibility of the likelihood ratio test when a nuisance parameteris present only under the alternative. Annals of Statistics, 23, 1609–1629.
Ausiello, G., D’Atri, A., & Protasi, M. (1980a). Structure preserving reductions among convex optimizationproblems. Journal of Computer and System Sciences, 21, 136–153.
Ausiello, G., Marchetti-Spaccamela, A., & Protasi, M. (1980b). Toward a unified approach for the classifica-tion of NP-complete optimization problems. Theoretical Computer Science, 12, 83–96.
Brennan, S. M., Maccabe, A. B., Mielke, A. M., & Torney, D. C. (2004). Radiation detection with distributedsensor networks. IEEE Computer, 37(8), 57–59.
Chong, C. Y., & Kumar, S. P. (2003). Sensor networks: evaluation, opportunities and challenges. Proceedingsof the IEEE, 91(8), 1247–1256.
Davies, R. (1977). Hypothesis testing when a nuisance parameter is present only under the alternative. Bio-metrika, 64, 247–254.
Davies, R. (1987). Hypothesis testing when a nuisance parameter is present only under the alternatives. Bio-metrika, 74, 33–43.
Dersch, R. (2004). Primary and secondary measurements of 222Rn. Applied Radiation and Isotopes, 60,387–390.
Diggle, P., Morris, S., Elliott, P., & Shaddick, G. (1997). Regression modeling of disease in relation to pointsources. Journal of Royal Statistical Society A, 160, 491–505.
Drew, C. H., Grace, D. A., Silbernagel, S. M., Hemmings, E. S., Smith, A., Griffith, W. C., Takaro, T. K.,& Faustman, E. M. (2003). Nuclear waste transportation: case studies of identifying stakeholder riskinformation needs. Environmental Health Perspective, 111, 263–272.
Efron, B. (1979). Bootstrap methods: another look at the jackknife. Annals of Statistics, 7, 1–26.Fetter, S., Frolov, V. A., Miller, M., Mozley, R., Prilutsky, O. F., Rodionov, S. N., & Sagdeev, R. Z. (1990).
Detection nuclear warheads. Science and Global Security, 1, 225–302.Fetter, S., & Cochran, T. B. (1990). Gamma ray measurements of a Soviet cruise missile warhead. Science,
248, 828–834.Feldman, G. J., & Cousins, R. (1998). Unified approach to the classical statistical analysis of small signals.
Physical Review D, 57, 3873–3889.Gawande, K., & Smith, H. (2001). Nuclear waste transport and residential property values: estimating the
effects of perceived risks. Journal of Environmental Economics and Management, 42, 207–233.Katenka, N., Levina, E., & Michailidis, G. (2008). Local vote decision fusion for target detection in wireless
sensor networks. IEEE Transactions on Signal Processing, 56, 329–338.Kulldorff, M. (1997). A spatial scan statistic. Communications in Statistics Theory and Methods, 26, 1481–
1496.Lehmann, E. L. (1986). Testing statistical hypotheses (2nd edn.). New York: Wiley.Press, W., Teukolsky, S. A., Vetterling, W., & Flannery, B. P. (1992). Numerical recipes in C. Cambridge:
Cambridge University Press.Roe, B., & Woodroofe, M. (1999). Improved probability method for estimating signal in the presence of
background. Physical Reviews D, 60(55), 053009.van der Vaart, A. W. (1998). Asymptotic statistics. Cambridge: Cambridge University Press.Zhang, T., & Woodroofe, M. (2003). Credible and confidence sets for restricted parameter spaces. Journal of
Statistical Planning and Inference, 115, 479–490.Zhang, T. (2006). Existence of the signal in the signal plus background model. IMS Lecture Notes-Monograph
Series, 50, 144–155.