Detecting Approaching Cars via Artificial Insect...
6
ACCV2002: The 5th Asian Conference on Computer Vision, 23–25 January 2002, Melbourne, Australia 1 Detecting Approaching Cars via Artificial Insect Vision Naoya Ohta Department of Computer Science, Gunma University 1-5-1 Tenjin-cho, Kiryu, Gunma 376-8515 Japan [email protected] Abstract The application of computer vision or image processing technology is typically limited to expensive machines in big facilities. One reason for this phenomenon is the cost of hardware required by this technology. In order to develop computer vision algorithms runnable on inexpensive hard- ware, we look at the vision system of insects, and discuss four ideas we could take into account when developing such algorithms. On the basis of this discussion, we specify a de- sign for an approaching-car detection system for car driver assistance. This system is attached to the rear of a car, and faces backwards. If other cars approachfrom the rear, the system informs the driver. We investigated the performance of the system using various experiments and demonstrated its effectiveness. The amount of computation the system must carry out is approximately one ten-thousandth of that required by a conventional image processing algorithm. It is executable on a small and inexpensive processor for em- bedding purposes. 1 Introduction Technology of computer vision or image processing is increasingly being applied to real world problems and is utilized in many practical tasks. For instance, thanks to that technology, machines can detect defects of products in fac- tories, read post codes on letters, and replace advertisement signs with others in tennis game TV programs [5]. How- ever, we may also observe that application of this technol- ogy is largely limited to expensive machines in big facilities. We almost never see consumer machines, such as television sets or VCRs, being equipped with computer vision tech- nology. The biggest reason for this phenomenon lies in the cost of the required hardware. As images are large repositories of data, it is natural that fast, expensive computers are required. For the applications mentioned above, it is not a crucial problem because the cost is not the first priority in such applications. However, for consumer products, this problem is crucial because the cost is very important. Therefore, if we wish to develop consumer products equipped with computer vision technol- ogy, we have to develop very inexpensive computer vision algorithms executable by small and slow computers. Historically speaking, computer vision research has been linked with the analysis of human vision [4]. This might be the reason why most computer vision research seems to be aimed at the realization of the same kind of functions as those of humans. However, humans are not the only life which has vision. Insects have vision. This kind of vision clearly provides crucial information for their lives. At the same time, these vision systems must be implemented on very simple hardware or neural systems. Therefore, if we look at those vision systems, we might be able to get some hints as to how we might develop simple computer vision algorithms runnable on small and inexpensive hardware. Of course, even if we find such algorithms, they would be use- less if they do not provide valuable functions. However, it is known that houseflies stabilize their flight and control land- ing by vision [1]. There must be many consumer products to which these functions are applicable. In this paper, we discuss an approaching-car detection system inspired by insect vision. This system is designed to be set on a car facing backwards. When other cars ap- proach from the rear, it visually detects them and warns the driver. The point of this system is that it requires only very inexpensive hardware. 2 Artificial Insect Vision There have been many studies inspired by insect vision. One of the most successful examples is the study reported in [2]. In that study, a mobile robot was actually built, which was able to move around in a room avoiding obstacles us- ing an insect-like vision system. The focus of this study lies in an attempt to understand the mechanisms of insect vision, copying them faithfully onto artificial machines. As our purpose is to make inexpensive vision systems, we con- sider insect vision from a somewhat different point of view.
Transcript of Detecting Approaching Cars via Artificial Insect...

ACCV2002:The5thAsianConferenceon ComputerVision,23–25January2002,Melbourne,Australia 1
DetectingApproachingCars via Artificial InsectVision
NaoyaOhtaDepartmentof ComputerScience,GunmaUniversity
1-5-1Tenjin-cho,Kiryu, [email protected]
Abstract
Theapplicationof computervisionor image processingtechnology is typically limited to expensivemachinesin bigfacilities. One reasonfor this phenomenonis the cost ofhardware required by this technology. In order to developcomputervisionalgorithmsrunnableon inexpensivehard-ware, we look at the vision systemof insects,and discussfour ideaswecouldtakeinto accountwhendevelopingsuchalgorithms.Onthebasisof thisdiscussion,wespecifya de-signfor anapproaching-cardetectionsystemfor car driverassistance. Thissystemis attachedto therear of a car, andfacesbackwards. If othercars approach fromtherear, thesysteminformsthedriver. We investigatedtheperformanceof thesystemusingvariousexperimentsanddemonstratedits effectiveness.The amountof computationthe systemmustcarry out is approximatelyoneten-thousandthof thatrequiredby a conventionalimage processingalgorithm. Itis executableon a smallandinexpensiveprocessorfor em-beddingpurposes.
1 Intr oduction
Technologyof computervision or imageprocessingisincreasinglybeing applied to real world problemsand isutilized in many practicaltasks.For instance,thanksto thattechnology, machinescandetectdefectsof productsin fac-tories,readpostcodeson letters,andreplaceadvertisementsignswith othersin tennisgameTV programs[5]. How-ever, we mayalsoobserve thatapplicationof this technol-ogyis largelylimited to expensivemachinesin big facilities.Wealmostneverseeconsumermachines,suchastelevisionsetsor VCRs, beingequippedwith computervision tech-nology. Thebiggestreasonfor this phenomenonlies in thecostof therequiredhardware.
As imagesarelargerepositoriesof data,it is naturalthatfast,expensivecomputersarerequired.For theapplicationsmentionedabove, it is not a crucial problembecausethecostis not thefirst priority in suchapplications.However,
for consumerproducts,this problemis crucialbecausethecost is very important. Therefore,if we wish to developconsumerproductsequippedwith computervision technol-ogy, we have to developvery inexpensive computervisionalgorithmsexecutableby smallandslow computers.
Historicallyspeaking,computervisionresearchhasbeenlinkedwith theanalysisof humanvision [4]. Thismightbethereasonwhy mostcomputervision researchseemsto beaimedat the realizationof the samekind of functionsasthoseof humans. However, humansare not the only lifewhich hasvision. Insectshave vision. This kind of visionclearly providescrucial informationfor their lives. At thesametime, thesevision systemsmustbe implementedonvery simplehardwareor neuralsystems.Therefore,if welook at thosevision systems,we might beableto getsomehints asto how we might developsimplecomputervisionalgorithmsrunnableonsmallandinexpensivehardware.Ofcourse,evenif wefind suchalgorithms,they wouldbeuse-lessif they donotprovidevaluablefunctions.However, it isknown thathousefliesstabilizetheirflight andcontrolland-ing by vision [1]. Theremustbemany consumerproductsto which thesefunctionsareapplicable.
In this paper, we discussan approaching-cardetectionsysteminspiredby insectvision. This systemis designedto be seton a car facingbackwards. Whenothercarsap-proachfrom therear, it visually detectsthemandwarnsthedriver. Thepoint of this systemis that it requiresonly veryinexpensivehardware.
2 Artificial Insect Vision
Therehave beenmany studiesinspiredby insectvision.Oneof the mostsuccessfulexamplesis the studyreportedin [2]. In thatstudy, amobilerobotwasactuallybuilt, whichwasableto move aroundin a roomavoiding obstaclesus-ing an insect-like vision system. The focus of this studylies in an attemptto understandthe mechanismsof insectvision,copying themfaithfully ontoartificial machines.Asourpurposeis to makeinexpensivevisionsystems,wecon-siderinsectvision from asomewhatdifferentpointof view.

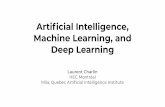
micro-processor
multiplexer
apertures
photo-diodes
control
warning signal
A/D converter
Figure 1. Hardware of the system.
Wedonotattemptto copy thedataprocessingproceduresofinsectvision. Rather, we imitatemechanismsof the insectvision if they reducethe amountof computation.Specifi-cally, we reconsiderour vision systemsfrom thefollowingpointsof view.
(a) Utilization of low resolutionimages:The fact that insectsusecompoundeyes suggeststhat
high resolutionimagesaresometimesnot essentialto getvaluableinformation from vision. We considerusageoflow resolutionimagesbecausethey reducedrasticallytheamountof datato beprocessed.
(b) Utilization of imaging devicesother than videocam-eras:
Video cameraswere originally designedto get imagesakin to thosehumanssee.However, otherimagingdeviceslike photo diodeswhosefields of view are controlledbyaperturescould provide imagessuitablefor low price sys-tems.
(c) Utilization of optical imageprocessing:Optical systemscan also processimages. It is well
known that frequency filtering of imagescanbeeasilycar-ried out with a lens system[7]. So, we shouldconsiderwhetherwe canuseoptical imageprocessingfor our sys-tems.
(d) Utilization of analogcircuits for computation:Digital circuits are usually usedfor dataprocessingin
computervisionsystems.However, analogcircuitscouldbeadvantageouswhencomputingthedifference,sumor timedelayof signalsfrom imagingdevices.
By consideringour computervision systemsfrom the
W0W1
Wn
x
Figure 2. Receptive fields of aper tures.
above pointsof view, we might beableto designinexpen-sive systems. Of course,we neednot adoptall of thoseideas. We adoptsomeof themonly whenthey reducethecostof our systems.We usedthe first two ideasabove forour approaching-cardetectionsystem.We call this design-ing strategy Artificial InsectVision in this report.
Figure1 shows thehardwareof theapproaching-carde-tectionsystemwe designedfollowing the Artificial InsectVision strategy. A specialimagingdevice, whosefieldsofview arecontrolledby cylindrical apertures,providesinten-sity signalsfor car detection. The numberof aperturesorsignalsis several tens. So, this device reducesthe amountof datato beprocessed.Theintensitysignalsareconvertedin digital form by an A/D converterandareprocessedbya microprocessor. This microprocessorcanbe a small andinexpensive oneusablein embeddedsystems.We actuallyuseddigital circuitsfor thispart,but it couldhavebeenreal-izedby analogcircuits. We leave this subjectfor thefuturework.
3 Car DetectionSystem
Thebacksidedirectioncanbeadangerouszonebecauseit is hard for the driver to see. If the driver changeslanewithout noticingothercarscoming,it canobviously causeacollision. Therefore,asystemthatcouldmonitorthatzoneandwarn of othercarscomingwould beuseful. Many vi-sionsystemsmonitoringthesurroundingsof acarhavebeenreported,andthey oftenrequirehigh speedprocessorsspe-cially designedfor imageprocessing[3]. As statedin theprevioussection,our systemrequiresonly a small proces-sor, owing to aninsect-like imagingdevice.
Theprincipleof cardetectionis quitesimple.Whenourcarmovesforward,objectsin thebacksideviewsmove(rel-atively) backwards.However, if therearecarsapproachingourcar, forwardmovementis observed.Thesystemdetectsthis movementusingoptical flow andthereforegaugestheexistenceof othercars.
Theaperturesof the imagingdevice in Fig. 1 aresetso
2

thattheir field of view cover theadjacentlane.Theellipsesin Fig. 2, indicatedby
���( ���������� ), show thefield of
view of theapertures.Let �� ��� �� denotethe intensitysignalobtainedfrom the ellipse
� �at the time � . Approaching
carsaredetectedfrom �� ��� ��� by thefollowing algorithm.
— Step1 —We computethe spacederivative ���� ��� ��� and the time
derivative ���� ��� �� of the intensity �� ��� ��� by the followingequations.
���� ��� ��� � �� ��� ������� � �� ��� ���"! �� � ��� � �#�����$� �� � ��� � ���% (1)
���& ��� ��� � �� � ��� � �� � �� ��� ���"! �� � ��� � �#�����$� �� ��� �#�����% (2)
— Step2 —Weprepareadataarray '( ��� �� , whichstoresstates.If the
condition )���� ��� ��
)+*-, �(3)
holds,we set '� ��� �� to stateA. In the above equation,, �
is a threshold,which is setto 2.0 in theexperiments.Thisconditionindicatesthat thespacederivative is too small tocomputereliableoptical flow [6]. It alsosuggeststhat nocarsexist becausecarbodiesusuallymakeanintensitytex-tureanda largespacederivative is observedin suchthear-eas.For thepartwherethecondition(3) doesnot hold, weapplythefollowing procedures.
— Step3 —We compute1-dimensionalopticalflow .+ ��� �� by
.+ ��� ��� � � ���& ��� ������ ��� ���/ (4)
andcheckthecondition
.+ ��� ��&0 � � (5)
If thecondition(5) holds,weset '( ��� �� to stateB, otherwiseto stateC. StateC indicatesthat ”expanding”optical flowwasdetected,which canbeinterpretedasapproachingcarsexist. On the otherhand,stateB shows that ”contracting”opticalflow wasdetected,which mustbegeneratedby pat-ternson theroadsurfacesuchasazebracrossing,or slowercarsthan ours. We thus summarizethe meaningof eachstateasfollows.
StateA: No cars.StateB: No cars,or carsgoingapart.StateC: Approachingcars.
— Step4 —We look at the part of the array '( ��� ��� sectionedby the
currenttime ��1 anda passedtime � � , andcountthenumberof statesof type C in that part. If this numberis greater
Figure 3. Gaussian weightings on experimen-tal images.
thana threshold,32
, thesystemdecidestheexistenceof ap-proachingcarsandoutputsthe warningsignal. In the ex-periments,weset
,42to 60andthetimespanbetween��1 and� � to 10 frames. The function of this procedureis to inte-
gratethe statesin the array '( ��� ��� and to provide a stableoutput.Individualstatesof '� ��� �� areunstablebecausetheyarecomputedusingonly local information.
4 Experiments
We conductedexperimentsin orderto investigatetheef-fectivenessof our systemdesign.In orderto get the inten-sity signals�� ��� �� , it is bestto actuallymaketheimagingde-vicein Fig. 1, but asthefirst step,wesimulatedthefunctionof theimagingdevice by accumulatingpixel valuesof reg-ularvideoimageswith Gaussianweightings,becauseof theeaseof conductingsuchexperiments.The receptive fieldsof theimagingdevice,or Gaussianweightingsin this case,areshown in Fig. 3. The ellipsesshow the standarddevi-ation regionsof the Gaussianweightings.The ratio of theshortaxisto thelongaxisof all ellipsesis 0.2. Thenumberof ellipsesis 50. We decidedthis shapeandthenumberoftheellipseson thebasisof apreliminaryexperiment.
Figure 4 shows the experimentalresult for a daytimescene.The original imagesequence,which was taken byaregularvideocamera,consistsof 300frames,from which4 framesareshown in Fig. 4 (a). The intensity �� ��� �� , thestate'( ��� ��� andthefinal decisionareshown in Fig. 4 (b), (c)and(d), respectively. In theseimages,thehorizontalaxisistime or frame � . White linesmarkedin thebottomindicate10 frameintervals. For Fig. 4 (b) and(c), theverticalaxisis the position � of the receptive field
� �. In Fig. 4 (a)
and(c), stateA, B, andC areexpressedby gray, white andblack,respectively. In Fig. 4 (d), thewhite regionsindicatethat the systemdetectedapproachingcars. In this daytimescene,acarapproachesin thefirst partof thesequence,thengoesbackonce,andgetscloseragainto passour car. The
3

Frame30 Frame120
Frame250 Frame290(a) Imagesequence.
(b) �� ��� ���(c) '( ��� ���(d) Result
Figure 4. Car detection result 1 (daytime)
systemdetectedthis situationcorrectly.A resultof theprocessingof night-timeimagesis shown
in Fig. 5. The imagesin Fig. 5 (a), (b), (c) and(d) showthe sameinformationas in Fig. 4. In this scene,two carspassour car. Theheadlightsof thecarsyield goodcontrastin the intensitysignals�� ��� ��� , andthesystemstablydetectstheapproachingcars.Therearetwo gapsin themiddlepartof thedetectionresultof Fig. 5 (d). In thesegaps,thecarsactuallygo back.
Weshow somescenesfor whichthesystemfailedto cor-rectly give a warning. One is a twilight sceneshown inFig. 6. In this scene,theroadhasa very low constantin theintensitybecausethe sky is so bright andthe cameracon-trols its gain to meetthe sky’s brightness.As a result,thesystemfails to detectthepassingcar. If wesetthethreshold, �
in Eq. (3) to 0.5 insteadof 2.0 in order to increasethesensitivity, thesystemoutputsthecorrectresultasshown inFig. 6 (e) and(f). This suggeststhatwe cancopewith thisproblemby controlling the gain accordingto the intensitysignals�� ��� ��� .
Theotherexamplewherethesystemfailedis a sceneofcurvedroads,shown in Fig. 7. Theprinciple for cardetec-tion statedin the previous sectionis valid only when theroad is straightandour car goesstraight. Therefore,it iseasilysurmisedthat thesystemwill beconfusedwhenourcar travels on a curved road. In the sceneof Fig. 7, thesystemoutputfalsealarmsfrom themiddleof thesequence
Frame20 Frame60
Frame140 Frame260(a) Imagesequence.
(b) �� ��� ��(c) '( ��� ��(d) Result
Figure 5. Car detection result 2 (night).
Table 1. Computation time par frame .Process Time in second
Imagingsimulation 1.22Cardetection 3.46576��$8:9
Opticalflow computation 1.44
becauseour car startedto turn right at that point. The ro-tation of our car generatedapproachingmovementof thewhite lines,andthe systemdetectedthis movementasap-proachingcars.However, wecancopewith thisproblembychangingthepositionsof thereceptivefields
���according
to the steeringinformation. We are now working on thisproblem,andcanshow only a preliminaryresult in Fig 8.Figure8 (a) shows the arrangementof the receptive fieldsand(b) is thestate'( ��� �� for thelast150framesof thesameimagesequencein Fig. 7. We observe that the falsemove-mentof thewhite lineshasdisappeared.
The biggestadvantageof the car detectionsystempro-posedin this paperis the small computingcost. In orderto show this advantage,we measuredtheprocessingtimes,which are shown in Table 1. The figuresin the tablearethe times in secondfor processingone frame of the im-agesequenceby an Intel PentiumII 400MHz processor.Thefirst row, which is labeled“Imaging simulation”,is thetimeneededto simulatethefunctionof theimagingdevice,
4

Frame70 Frame140
Frame200 Frame270(a) Imagesequence.
(b) �� ��� ���(c) '( ��� ���(d) Result
(e) '( ��� ���(f) Result
Figure 6. Car detection result 3 (twilight).
namely, to accumulatepixel valuesof input imageswith theGaussianweightingsin orderto obtaintheintensitysignals�� ��� ��� . The secondrow, labeled“Car detection”,is for thecardetectionprocessdescribedin Section3, which thepro-cessorin Fig. 1 is supposedto actuallycompute.Thethirdrow, labeled“Optical flow computation”, is the time forcomputingoptical flow at 56 5 40 (2240)pointson the im-ageby ausualopticalflow computationmethod[6] (Fig.9).We showedthis figureonly comparisonpurposesasanex-ampleof processingtimeof conventionalimageprocessingalgorithms.Comparingthesecondrow with the third one,weobservethatthecomputingcostof theproposedmethodis smallerin theorderof 6�� 8:9 thanthatof theconventionaloptical flow computation. This indicatesthat a small andinexpensiveprocessorcaneasilycarryout ourmethod.
5 Summary and Conclusions
In this paper, we first discussedwhat kind of hints wecangetfrom thevision systemof insectsfor thepurposeofdevelopingcomputervisionalgorithmsexecutableonsmallandinexpensivehardware.Wesummarizedthehintsasfour
Frame90 Frame140
Frame230 Frame290(a) Imagesequence.
(b) �� ��� ��(c) '( ��� ��(d) Result
Figure 7. Car detection result 4 (cur ved road)
pointsweshouldnotewhendesigningsuchavisionsystem.Then, following sucha designstrategy, which we termedArtificial InsectVision,wedesignedanapproaching-carde-tectionsystem.Theexperimentsshow that thesystempro-videsa goodperformanceat a small computingcost. Theamountof computationthealgorithmrequiresis in theorderof 6��$8:9 of thatrequiredby aconventionalimageprocessingalgorithm.
Therearetwo main issuesleft for the futureresearchinorderto make the systemmorepractical. Oneis the prob-lem for curvedroads. As mentionedin the sectionfor theexperiments,we aretrying to solve this problemby chang-ing positionsof the receptive fields of the imagingdeviceaccordingto theinformationfrom thesteeringwheelof thecar. If we assumethe roadsurfaceis flat, patternson theroadmovealonganellipseor conicon theimage,whenthecar is rotating. Therefore,if we align the receptive fieldsalong that ellipse, the systemcandistinguishoptical flowgeneratedby approachingcarsfrom that due to road pat-terns.
The secondissueis to actually constructthe system—especiallythe imagingdevice. We have found it desirablethat the receptive field of a photodetectorof the imagingdevicehasaGaussian-likesensitivity, asweassumedin theexperiments.Theproblemis whetherwe canrealizethesecharacteristicsusinga cylindrical aperture.Preliminaryex-
5

(a)Receptivefieldsalonga curvedline.
(b) '( ��� ��Figure 8. Experiment with cur ved receptivefields.
Figure 9. Optical flo w by a conventional algo-rithm.
perimentssuggesttheansweris in theaffirmative.
Anotherissuefor thefuturework, asidefrom approach-ing car detection,is to investigatewhat otherkind of sys-tems we can designon the basisof the Artificial InsectVision strategy. We areplanning,for instance,a collisionavoidancesystemanda rotationsensor, but wecannotstatemuchabouttheseyet,astheresearchhasjustcommenced.
Acknowledgments
The author thanks Professor Kenichi Kanatani ofOkayamaUniversity and ProfessorMichael J. Brooks ofUniversityof Adelaide,whodiscussedtechnicalissueswithhim andhelpedto correcttheEnglishin thispaper. Theau-thoralsothanksMr. KazutakaNiijima of ToshibaCorpora-tion andMr. HirotakaYamamotoof GunmaUniversity forconductingtheexperiments.
References
[1] W. Bialek,M. Potters,D. RudermanandR. R. deRuytervanSteveninck, “V isual Computation:A Fly’s Eye View,” Pro-ceedingsof the 4th NEC Research Symposium, May 1993,pp.7–22.
[2] N. Franceschini,J. M. PichonandC. Blanes,“From InsectVision to Robot Vision,” PhilosophicalTransactionsof theRoyalSocietyof London, Ser. B, No. 337,1992,pp.283–294.
[3] S. Kyo, T. Koga,K. SakuraiandS. Okazaki,“A robustvehi-cle detectingandtrackingsystemfor wet weatherconditionsusingtheIMAP-VISION ImageProcessingBoard,” Proceed-ings of IEEE/IEEJ/JSAIInternational Conferenceon Intel-ligent TransportationSystems, Tokyo Japan,Oct. 1999,pp.423–428.
[4] D. Marr, Vision : A computationalinvestigationinto thehu-manrepresentationandprocessingof visual information, W.H. FreemanandCo.,1982.
[5] G.Medioni,“Using computervisionin realapplications:Twosuccessstories,” Proceedingof IAPR Workshopon MachineVisionApplications, Tokyo, Nov. 1996,pp.352–360.
[6] N. Ohta,“Imagemovementdetectionwith reliability indices,”IEICE Transactions, Vol. E74,No. 10, Oct. 1991,pp. 3379–3388.
[7] R.G.Wilson,Fourier seriesandoptical transformtechniquesin contemporary optics : An introduction, JohnWiley andSons,1995.
6