Design of interval type 2 t s fuzzy logic control systems
16
- 122 - http://www.sj-ce.org Scientific Journal of Control Engineering October 2014, Volume 4, Issue 5, PP.122-137 Design of Interval Type-2 T-S Fuzzy Logic Control Systems Li Li 1# , Yijun Du 2 , Yimin Li 2 1. School of Computer Science Telecommunication Engineering, Jiangsu University, Zhenjiang Jiangsu 212013, China 2. Faculty of Science, Jiangsu University, Zhenjiang Jiangsu 212013, China # Email: [email protected] Abstract In this paper, an interval type-2 T-S fuzzy logic control systems (IT2T-S FLCS) is designed. The proposed IT2T-S FLCS is a combination of IT2 fuzzy logic system (FLS) and T-S FLCS, and also inherits the benefits of these two methods. Furthermore, Krasovskii’s method is utilized to testify the sufficient condition for the asymptotic stability of IT2T-S FLCS, which requires the calculation of the Jacobian matrix. Finally, the simulation results show that the IT2T-S FLCS achieves the best tracking performance in comparison with the type-1 (T1) T-S FLCS and the proposed method can handle unpredicted internal disturbance and data uncertainties well. Keywords: Type-2 Fuzzy Sets; Stability; Jacobian Matrix 1 INTRODUCTION Since Takagi and Sugeno [1] proposed the T-S fuzzy model in 1985, the T-S fuzzy system has emerged as one of the most active and fruitful areas of fuzzy control. The T-S FLS [1, 2] was proposed in an effort to develop a systematic approach to generate fuzzy rules from a given input-output data set. This model consists of rules with fuzzy anteced- ents and a mathematical function in the consequent part. By using this modeling approach, a complex non-linear system can be represented by a set of fuzzy rules of which the consequent parts are linear state equations. The complex non-linear plant can then be described as a weighted sum of these linear state equations. This T-S fuzzy model is widely accepted as a powerful modeling tool. Their applications to various kinds of non-linear systems can be found in [3-5].Quite often, the knowledge used to construct rules in T-S FLS is uncertain. This uncertainty leads to rules having uncertain antecedents and/or consequents, which in turn translates into uncertain antecedent and/or consequent membership functions. When the measured data is less and the model is inexact, we can use Type-2 fuzzy sets[6]. Such type-2 fuzzy sets whose membership grades themselves are type-1 fuzzy sets; they are very useful in circumstances where it is difficult to determine an exact membership function for a fuzzy set, they are useful for incorporating linguistic uncertainties. The type-2 FLS has been successfully applied to sliding-mode controller designs, fault tolerant systems design, robust adaptive interval type-2 fuzzy tracking control of multivariable nonlinear systems and impulsive control of nonlinear systems[7-10].An indirecta daptive interval type- 2 fuzzy control is proposed in[11,12]. Moreover,direct and indirect adaptive interval type-2 fuzzy controlis developedin[13,14] for a multi-input/multi-output(MIMO) nonlinear system. Type -2 fuzzy systems have shown a great potential in various modeling as well as control application [15]. A. Abbadi[16] propose an interval type-2 fuzzy controller that has the ability to enhance the transient stability and achieve voltage regulation simultaneously for multimachine power systems. The design of this controller involves the direct feedback linearization technique. Hence, in this paper, we study the design of the IT2T-S FLCS.The proposed IT2T-S FLCS is a combination of IT2 FLS and T-S FLCS, and also inherits the benefits of these two methods. It was believed that IT2T-S FLS have the potential to be used in control and other areas where a T1T-S model may be unable to perform well. This paper is organized as follows: In Section 2, design procedure of the IT2T-S FLCS is addressed in detail. In Section 3, the proposed Krasovskii’s method is utilized to testify the sufficient condition for the asymptotic stability
description
li Li, Yijun Du, Yimin Li
Transcript of Design of interval type 2 t s fuzzy logic control systems

- 122 -
http://www.sj-ce.org
Scientific Journal of Control Engineering October 2014, Volume 4, Issue 5, PP.122-137
Design of Interval Type-2 T-S Fuzzy Logic
Control Systems Li Li
1#, Yijun Du
2, Yimin Li
2
1. School of Computer Science Telecommunication Engineering, Jiangsu University, Zhenjiang Jiangsu 212013, China
2. Faculty of Science, Jiangsu University, Zhenjiang Jiangsu 212013, China
#Email: [email protected]
Abstract
In this paper, an interval type-2 T-S fuzzy logic control systems (IT2T-S FLCS) is designed. The proposed IT2T-S FLCS is a
combination of IT2 fuzzy logic system (FLS) and T-S FLCS, and also inherits the benefits of these two methods. Furthermore,
Krasovskii’s method is utilized to testify the sufficient condition for the asymptotic stability of IT2T-S FLCS, which requires the
calculation of the Jacobian matrix. Finally, the simulation results show that the IT2T-S FLCS achieves the best tracking
performance in comparison with the type-1 (T1) T-S FLCS and the proposed method can handle unpredicted internal disturbance
and data uncertainties well.
Keywords: Type-2 Fuzzy Sets; Stability; Jacobian Matrix
1 INTRODUCTION
Since Takagi and Sugeno [1] proposed the T-S fuzzy model in 1985, the T-S fuzzy system has emerged as one of the
most active and fruitful areas of fuzzy control. The T-S FLS [1, 2] was proposed in an effort to develop a systematic
approach to generate fuzzy rules from a given input-output data set. This model consists of rules with fuzzy anteced-
ents and a mathematical function in the consequent part. By using this modeling approach, a complex non-linear
system can be represented by a set of fuzzy rules of which the consequent parts are linear state equations. The
complex non-linear plant can then be described as a weighted sum of these linear state equations. This T-S fuzzy
model is widely accepted as a powerful modeling tool. Their applications to various kinds of non-linear systems can
be found in [3-5].Quite often, the knowledge used to construct rules in T-S FLS is uncertain. This uncertainty leads
to rules having uncertain antecedents and/or consequents, which in turn translates into uncertain antecedent and/or
consequent membership functions. When the measured data is less and the model is inexact, we can use Type-2
fuzzy sets[6]. Such type-2 fuzzy sets whose membership grades themselves are type-1 fuzzy sets; they are very
useful in circumstances where it is difficult to determine an exact membership function for a fuzzy set, they are
useful for incorporating linguistic uncertainties. The type-2 FLS has been successfully applied to sliding-mode
controller designs, fault tolerant systems design, robust adaptive interval type-2 fuzzy tracking control of
multivariable nonlinear systems and impulsive control of nonlinear systems[7-10].An indirecta daptive interval type-
2 fuzzy control is proposed in[11,12]. Moreover,direct and indirect adaptive interval type-2 fuzzy controlis
developedin[13,14] for a multi-input/multi-output(MIMO) nonlinear system. Type -2 fuzzy systems have shown a
great potential in various modeling as well as control application [15]. A. Abbadi[16] propose an interval type-2
fuzzy controller that has the ability to enhance the transient stability and achieve voltage regulation simultaneously
for multimachine power systems. The design of this controller involves the direct feedback linearization technique.
Hence, in this paper, we study the design of the IT2T-S FLCS.The proposed IT2T-S FLCS is a combination of IT2
FLS and T-S FLCS, and also inherits the benefits of these two methods. It was believed that IT2T-S FLS have the
potential to be used in control and other areas where a T1T-S model may be unable to perform well.
This paper is organized as follows: In Section 2, design procedure of the IT2T-S FLCS is addressed in detail. In
Section 3, the proposed Krasovskii’s method is utilized to testify the sufficient condition for the asymptotic stability

- 123 -
http://www.sj-ce.org
of IT2T-S FLCS. In Section 4, developed expressions are obtained deriving the IT2T-S fuzzy system model with
regard to every coordinate of the state space. In Section 5, developed expressions in the previous section are used to
implement an algorithm. In Section 6, the proposed methodology is illustrated by an example. The conclusions are
drawn in Section 7.
2 ANALYSIS AND DESIGN OF IT2 FUZZY CONTROLLER ON T-S MODEL
An easy way to comply with the journal paper formatting requirements is to use this document as a template and
simply type your text into it.
2.1 RULE BASE
lR : If 1x is
1
l
iA and 2x is
2
l
iA … and nx is l
niA and1u is
1
l
iB and 2u is
2
l
iB … and mu is l
miB
Then 0 1 1 1 1( , )l l l l l l l
i i i i ni n i mi mx g X U a a x a x b u b u (1)
Where 1, ,l M is the number of rules, l
kiA are the IT2 fuzzy sets defined in a universe of discourse for the state
variablekx , 1, ,k n and l
ix is the first-order differential equation i , l
jiB is the IT2 fuzzy set defined in a universe
of discourse for the j th control signal ju , 1, ,j m , l
kia and l
jib represent the respective constant coefficients for
the state variable kx and for the j th signal of control of the differential equation i that represents the process. The
proposed IT2T-S FLCS for the case when antecedents are IT2 and consequents are crisp numbers.
2.2 FUZZY INFERENCE ENGINE
The inference engine combines all the fired rules and gives a non-linear mapping from the input IT2 fuzzy sets to the
output IT2 fuzzy sets. Input 1 2 n( , , , )T nX x x x R denotes the state vector, and
1 2U ( , , , ) m
mu u u R denotes
the input control vector. This rule represents an IT2 relation between the input space1 1n mX X U U , and
the output space X , of the IT2 FLS.
The firing strength of the l th rule is
11 1 1 1
1 1 1 1
1 1
1 1
( ) ( )
( ) ( )
ln n n n
l lm m m m
l
i x X x X n nX XA A
u U u U m mU UB B
w x x x x
u u u u
(2)
Here we focus on a major simplification of (2) as a result of singleton fuzzification, hence the fuzzy set X or U is
such that it is has a membership grade 1 corresponding to X X or U U and has zero membership grade for all
other inputs; therefore, (2) reduces to
1 1
1 11 1
l l l l l ln m k j
n ml
i n m k jA A B B A Bk jw x x u u x u
(3)
where ( 1,2, )kx k n and ( 1,2, )ju j m denote the location of the singleton.
lR is described by the membership function ( )l
l
iRx
1 1
( )l l l li k j
n ml l
i i k jR X A Bk jx x x u
(4)
where now each l
iX is a crisp value l
ix , so (4) reduces to
1 1
( )l l lk j
n ml
i k jR A Bk jx x u
(5)
Then output fuzzy set ( )R ix for a IT2 FLS is
1 1 1 1
( ) ( )l l lk j
M M n ml
R i i k jR A Bl l k jx x x u
(6)
where denotes the product operation.
Let COG ( ( )iRx ) and COG ( ( )R ix ) denote the centroid of the lower membership function (LMF) and upper

- 124 -
http://www.sj-ce.org
membership function (UMF), respectively, of ( )R ix . Then, we can define the output of an IT2 FLSix , as
ix =w COG ( ( )iRx )+(1-w) COG( ( )R ix ) (7)
where weight w∈[0, 1] can be tuned during a design procedure [7].
So the output of an IT2T-S FLCSix is shown as
1 1
1 1
( , ) ( , )(1 )
M Ml l l l
i i i il l
i M Ml l
i il l
w g X U w g X Ux w w
w w
(8)
1 1
( ) ( )l lk j
n ml
i k jA Bk j
w x u
(9a)
1 1
( ) ( ))l lk j
n ml
i k jA Bk j
w x u
(9b)
1 1
( ) ( )l lk j
n ml
i k jA Bk j
w x u
,ll l
ii iw w w
(10)
Where w can be tuned during a design procedure. ( )k
l
kAx and ( )
j
l
jBu are the membership functions defined in
their corresponding universe of discourse X and U .
Take the consequent of the rule (1) into (8), which can be written as
0 1 1 1 11 1 1 1
2 21 1 1
M M M Ml l l ll l l l
i i i ii i ni n il l l l
i M l M Ml ll li i ii mi ml l l
w a w a x w a x w b uwx
w w b u w b u
+ 0 1 1 1 11 1 1 1
2 21 1 1
1M M M Ml l l l l l l l
i i i i i ni n i il l l l
M M Ml l l l li i i i mi ml l l
w a w a x w a x w b uw
w w b u w b u
(11)
This is
0 1 1 2 2 1 1 2 2
t t t t t t t
i i i i ni n i i mi mx a a x a x a x b u b u b u
0 1 1
n mt t t
i ki k ji jk ja a x b u
(12)
Where0
t
ia , t
kia and t
jib are variable coefficients computed as
0 01 1
0
1 1
1
M Ml l l l
i i i it l l
i M Ml l
i il l
w a w aa w w
w w
(13a)
1 1
1 1
1
M Ml l l l
i ki i kit l l
ki M Ml l
i il l
w a w aa w w
w w
1, ,k n (13b)
1 1
1 1
1
M Ml l l l
i ji i jit l l
ji M Ml l
i il l
w b w bb w w
w w
1, ,j m (14)
Up to here, the IT2 fuzzy plant model is obtained from the development of the methodology. Next, we will develop
the IT2 fuzzy controller model.
The process of the fuzzy controller design that stabilizes the plant is considered independently from the process of
the plant identification. Therefore, it does not require the model plant and the controller have the same number of
rules.
Considering those mentioned above, the achievement of the IT2 fuzzy plant model proceeds in a similar way. The
IT2 fuzzy controller can be represented by the following group of rules:
rR : If 1x is 1
r
jC and 2x is 2
r
jC … and nx is r
njC Then 0 1 1
r r r r
j j j nj nu c c x c x (15)
Where r
kjC represents the IT2 fuzzy sets of 1, ,k n state variables, with 1, ,j m control actions and
1, ,r N rules.

- 125 -
http://www.sj-ce.org
Control signals can be expressed as follows in a similar way shown in (8)-(12):
0 1 11 1 1
1
N N Nr r rr r r
j j jj j j nj nN r r rr
jr
wu w c w c x w c x
w
+
0 1 11 1 1
1
1 N N Nr r r r r r
j j j j j nj nN r r rr
jr
ww c w c x w c x
w
(16)
Or, in a more simplified way:
0 1 1 2 2
t t t t
j j j j nj nu c c x c x c x = 0 1
nt t
j kj kkc c x
(17)
where the variable coefficients are given by
0 01 1
0
1 1
1
N Nr r r r
j j j jt r rj N Nr r
j jr r
w c w cc w w
w w
(18a)
1 1
1 1
1
N Nr r r r
j kj j kjt r rkj N Nr r
j jr r
w c w cc w w
w w
1, ,k n (18b)
and the lower and upper matching degree of the rule r of the controller, respectively by
1
( )rk
nr
j kCk
w x
(19a)
1
( )rk
nr
j kCk
w x
(19b)
Replacing expression (17) into (12), the following IT2T-S closed loop output function can be written as:
0 01 1 1
m n mt t t t t t
i i ji j ki ji kj kj k jx a b c a b c x
, , 1, ,i k n and 1, ,j m (20)
Expression (20) is an equivalent mathematical closed loop model of IT2T-S FLCS. In order to simplify Eq. (20), the
state vector will be extended in a coordinate, that is
0 1
1, ,
T
nx x x xX
(21)
Replacing the extended state vector into (20) the simplified following expression is obtained
0 1( )
n mt t t
i ki ji kj kk jx a b c x
0,1, ,k n , 1, ,i n and 1, ,j m (22)
3 STABILITY VERIFICATION OF THE IT2T-S FLCS
The stability of nonlinear systems has to be investigated without making linear approaches. In order to do this,
several approaches can be adopted based on Lyapunov’s second method, for instance, Krasovskii’s theorem [17, 19].
Krasovskii’s theorem for global asymptotic stability offers sufficient conditions for nonlinear systems. An
equilibrium state of a nonlinear system can be stable even when the conditions specified in this theorem are not
satisfied; however, the synthesis of systems that complete this theorem assures that they are asymptotically stable
globally.
Krasovskii’s theorem demonstrates that given a system X = ( )X , if the system’s Jacobian matrix ( ) ( )TJ X J X is
negative definite in a region around the equilibrium state eX , this is asymptotically stable in its proximities.
Moreover, if ( ) ( )TX X when X , the asymptotical stability is global. The Lyapunov function for this
system is ( )TX ( )X .
In section 4, we present a general algorithm to compute the Jacobian matrix of a closed loop IT2T-S FLCS. The
algorithm has been improved by a simplification of the equations based on the state vector extension. The algorithm
is independent of the type of membership function used for building the models of the plant and the controller.
Different types of membership functions in the same model can also be combined in the proposed algorithm.

- 126 -
http://www.sj-ce.org
4 COMPUTATION OF THE JACOBIAN MATRIX OF A CLOSED LOOP IT2T-S FLCS
Let the IT2T-S control system modeled by Eq. (22), which can be represented in the following generic way:
1 1 1 2( , , , )nx x x x
2 2 1 2( , , , )nx x x x
....
1 2( , , , )n n nx x x x (23)
Let 1 2( , , , )e e e e T
nX x x x be an equilibrium state of system (20). Whereas the function is continuous over the range,
a Taylor series expansion about the point eX may be used:
1 2
1 1
1
( , , , )
e
e e i n
i i
X
x x xdx x x x
dt x
+…+ 1 2( , , , )
e
e i n
n n
n X
x x xx x
x
+ ( )e
iR X (24)
When the nonlinear term ( )e
iR X fulfills (25), being iK a sufficiently small constant, then the Jacobian matrix of the
system determines the properties of stability of the equilibrium state eX :
2 2
1 1( )e e e
i i n nR X K x x x x
(25)
The Jacobian matrix is calculated applying the following expressions:
1 1 2 1 1 2
1
1 2 1 2
1
( , , , ) ( , , , )
( )
( , , , ) ( , , , )
e e
e
e e
n n
nX X
iq X
n n n n
nX X
x x x x x x
x x
J X
x x x x x x
x x
(26)
In the previous expression it is needed to calculate the partial derivative from Eq. (22) with regard to each one of the
state variables. This equation can be divided in two addends:
0 1( )
n mt t t
i ki ji kj kk jx a b c x
=
0 0 1
n n mt t t
ki k ji kj kk k ja x b c x
(27)
The partial derivatives will be obtained in a generic form for the 1, ,q n state variables and the 1, ,i n first
degree differentials equations.
4.1 DERIVATIVE OF THE FIRST ADDEND
The first partial derivative to calculate is from the first adding of Eq. (27):
0
0 0
n t t tki k n nk ki k tki
k qik kq q q
a x a x ax a
x x x
(28)
Bearing in mind (13b):
1 1 1 1
1 1 1 1
1
1
M M M Ml ll l l l l l
i iki i ki ki i kil l l l
M M M Ml ll lti ii il l l lki
q q q q
w a w a w a w aw w
w w w waw w
x x x x
(29)
Calculate the first adding of Eq. (29):
1 1 1
1 11
2
1
M M Ml l ll li ki i ikil M Ml ll l l
M l i i kil li q ql
M lq
il
w a w a ww w a
w x xw w
xw
(30)
while 1
1
M l ll
i ki Ml li
kilq q
w a wa
x x
(31)

- 127 -
http://www.sj-ce.org
and 1
1
M ll
i Ml i
lq q
w w
x x
(32)
Replacing now the previous two expressions in (30) and simplifying, it results in
1
1 1
1
2
1( )
M l ll
i ki M Ml p l piM l i ki kil p
i ql
M lq il
w a ww a a
w xw w
x w
(33)
calculate the second adding of Eq. (29) is similar to calculate the first adding of Eq. (29):
1
1 1
1
2
1
1 1( )
M l ll
i ki M Ml p l piM i ki kil l p
i ql
M lq il
w a ww a a
w xw w
x w
(34)
Replacing (33), (34) expressions in (29) , it results in
1 1 1 1
2 2
1 1
1( ) ( )
l lM M M Mp l p p l pi i
i ki ki i ki kil p l ptq qki
M Ml lq i il l
www a a w a a
x xaw w
x w w
(35)
Finally, Eq. (28) can be written as
0
1 1 1 1
2 20
1 1
1
n t
ki kk
q
l lM M M Mp l p p l pi i
i ki ki i ki kil p l pn q q t
k qik M Ml l
i il l
a x
x
www a a w a a
x xw w x a
w w
(36)
Notice that to evaluate expression (36) it is necessary to calculate previously the derivative of the matching degree of
the rules of the plant, given from Eq. (9a), (9b). This point is solved in Section 4.4.
4.2 DERIVATIVE OF THE SECOND ADDEND
To calculate the derivative of the second addend, the following expression must be solved:
0 1 1
0 1
n m mt t t t
ji kj k ji kjn mk j j t t
k ji qjk jq q
b c x b cx b c
x x
(37)
Where
1
1
m t tt t
ji kj mj ji kjt t
kj jijq q q
b c b cc b
x x x
(38)
Given the similarity of the expressions for the calculation of t
kia and t
jib , it is easy to deduce that
1 1 1 1
2 2
1 1
1( ) ( )
l lM M M Mp l p p l pi i
i ji ji i ji jit l p l pq qji
M Ml lq i il l
www b b w b b
x xbw w
x w w
(39)
The derivative of the term corresponding to the fuzzy controller will be:
1 1 1 1
1 1 1 1
1
1
N N N Nr rr r r r r r
j jkj j kj kj j kjr r r r
N N N Nr rr rtj jj jkj r r r r
q q q q
w c w c w c w cw w
w w w wcw w
x x x x
(40)

- 128 -
http://www.sj-ce.org
calculate the first adding of Eq. (40):
1 1 1
1 1
1
2
1
N N Nr r rr rj kj j jkjr N Nr rr r r
N r j j kjr rj q qr
N rq
jr
w c w c ww w c
w x xw w
xw
(41)
while 1
1
N r r rj kj Nr j r
kjrq q
w c wc
x x
(42)
and 1
1
N rr
j Nr j
rq q
w w
x x
(43)
Replacing now the previous two expressions in (41) and simplifying, it results in
1
1 1
1
2
1( )
N r r rj kj N N sr j r s
N j kj kjr r sqjr
N rq jr
w c ww c c
xww w
x w
(44)
calculate the second adding of Eq. (40) is similar to calculate the first adding of Eq. (40):
1
1 1
1
2
1
(1 ) (1 )( )
N r r rj kj N Nr j s r s
N j kj kjr r sj qr
N rq jr
w c ww c c
w xw w
x w
(45)
Finally, Eq. (40) can be written as
1 1 1 1
2 2
1 1
1( ) ( )
r rN N N Nsj r s j s r s
j kj kj j kj kjr st r sq qkj
N Nr rq j jr r
w ww c c w c c
x xcw w
x w w
(46)
Notice that to evaluate expression (46) it is necessary to calculate previously the derivative of the matching degree of
the rules of the controller, given from Eq. (19a), (19b). This point is solved in Section 4.3.
As soon as intermediate expressions (39) and (46) are calculated, they can be replaced in (38):
1
1 1 1 1
1 2 2
1 1
1( ) ( )
m t t
ji kjj
q
l lM M M Mp l p p l pi i
i ji ji i ji jil p l pm q q t
kjM Mj l l
i il l
b c
x
www b b w b b
x xw w c
w w
1 1 1 1
2 2
1 1
1( ) ( )
r rN N N Nsj r s j s r s
j kj kj j kj kjr s r sq q t
jiN Nr r
j jr r
w ww c c w c c
x xw w b
w w
(47)
Thus, the derivative of the second addend given by Eq. (37) is

- 129 -
http://www.sj-ce.org
0 1
1 1 1 1
0 1 2 2
1 1
1( ) ( )
n m t t
ji kj kk j
q
l lM M M Mp l p p l pi i
i ji ji i ji jil p l pn m q q t
kjM Mk j l l
i il l
b c x
x
www b b w b b
x xw w c
w w
1 1 1 1
12 2
1 1
1( ) ( )
r rN N N Nsj r s j s r s
j kj kj j kj kjr s r sq mq t t t
ji k ji qjN N jr r
j jr r
w ww c c w c c
x xw w b x b c
w w
(48)
4.3 DERIVATIVE OF THE MATCHING DEGREE OF THE RULES OF THE CONTROLLER
Given expression (19a) that defines the lower matching degree of the rules of the controller, the partial derivative of
this expression regarding to every state variable is obtained from
11
1 1 11
( )( )( ) ( ) ( )
rrn
r r rk k k
rn n nnCCj
k k kC C Ck k kq q q qk k n
xxwx x x
x x x x
(49)
Bearing in mind that
( )0i
j
f x
x
i j (50)
Eq. (49) can be written as
1
( )( )
rq
rk
rnqCj
kCkq q k q
xwx
x x
(51a)
Similar of the expression for the calculation, it is easy to deduce that
1
( )( )
rq
rk
rnqCj
kCk
q q k q
xwx
x x
(51b)
4.4 DERIVATIVE OF THE MATCHING DEGREE OF THE RULES OF THE PLANT
Given expression (9a) that defines the lower matching degree of the rules of the plant, the partial derivative of this
expression with regard to every state variable is obtained from
1 1
( )l lk j
l lln m
l li ii
i ik jA Bk jq q q q
w x w uwx u w u w x
x x x x
(52)
( 1
( )lk
nl
i kAk
w x x
, 1
( )lj
ml
i jBj
w u u
)
where
1
1
1 1 11
( )( )( ) ( ) ( )
llm
l l lj j j
lm m mmBBi
j j jB B Bj j jq q q qj j m
uuw uu u u
x x x x
(53)
then 1 1
( )( )( )
lv
lj
lmvm Bi
jv Bjq q j v
uw uu
x x
(54)
Now, bearing in mind (50):

- 130 -
http://www.sj-ce.org
1 1
( )( ) ( )
lq
l lk k
ln nqAi
k kA Ak kq q q k q
xw xx x
x x x
(55)
Replacing Eqs. (54) and (55) in (52):
11 1 1 1
( ) ( )( ) ( ) ( ) ( )
l lq v
l l l lj k k j
lm n n mq vA m Bi
j k k jvB A A Bj k k jq q qk q j v
x uwu x x u
x x x
(56a)
Similarity of the expression for the calculation, it is easy to deduce that
11 1 1 1
( ) ( )( ) ( ) ( ) ( )
l lq v
l l l lj k k j
l m n n mq vA m Bi
j k k jB A A Bvj k k jq q qk q j v
x uwu x x u
x x x
(56b)
Finally, the calculation of
l
i
q
w u
x
implies the derivative of the control vector. Writing again Eq. (17) with the
extended state vector showed in (21):
0
n t
j kj kku c x
(57)
Then 0
0
n tt
kj k nkj kjt
qj kkq q q
c xu cc x
x x x
(58)
Replacing now
t
kj
q
c
x
from (46):
0
1 1 1 1
0 2 2
1 1
1( ) ( )
n t
kj kkj
q q
r rN N N Nsj r s j s r s
j kj kj j kj kjr s r sqn qt
qj kN Nk r r
j jr r
c xu
x x
w ww c c w c c
x xc w w x
w w
(59)
4.5 JACOBIAN MATRIX
Every element of the Jacobian matrix, Eq. (26), is given by the derivative of the expression (27). Two addends of
this expression have been calculated in Sections 4.1 and 4.2, and they are given by Eqs. (36) and (48), therefore
1
1 1 1 1
0 2 2
1 1
( )
1( ) ( )
mi t t t
iq qi ji qjjq
l lM M M Mp l p p l pi i
i ki ki i ki kil p l pn q q
kM Mk l l
i il l
xJ x a b c
x
www a a w a a
x xw w x
w w
1 1 1 1
1 2 2
1 1
1( ) ( )
l lM M M Mp l p p l pi i
i ji ji i ji jil p l pm q q t
kjM Mj l l
i il l
www b b w b b
x xw w c
w w
1 1 1 1
2 2
1 1
1( ) ( )
r rN N N Nsj r s j s r s
j kj kj j kj kjr s r sq q t
ji kN Nr r
j jr r
w ww c c w c c
x xw w b x
w w
(60)

- 131 -
http://www.sj-ce.org
Notice that Eqs. (51a), (51b)and (56a), (56b)and therefore Eq. (60), are independent on the type of membership
function that is chosen to fulfill the fuzzy plant and controller models, so, it is possible to evaluate the Jacobian
matrix for any membership function. Moreover, it is possible to combine different membership functions in a same
model.
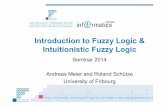
5 ALGORITHMS
Let IT2T-S FLCS defined by (1) and (15), whose fuzzy equivalent, considering IT2T-S consequent which is given
by (12), and the controller, considering equally IT2T-S consequent which is given by (17); the IT2T-S fuzzy closed
loop model is given by (22). An equilibrium state is given for the programming of this model.
Given a concrete state 1, ,T
nX x x , the steps to compute the Jacobian matrix of the closed loop system are
shown as follows:
(1). Calculate the matching degree of the rules of the fuzzy controller by (19a), (19b).
(2). Compute the variable coefficients of the fuzzy controller by (18b), 0,1, ,k n .
(3). Find the value of each of the signals generated by the fuzzy controller by (17).
(4). Calculate the matching degree of the rules of the fuzzy plant model by (9a), (9b).
(5). For the i th equation of the process and the q th state variable:
5.1. Calculate the variable coefficient of the plant model by (18b) and by (14) with 0,1, ,k n .
5.2. Compute the second addend of Eq. (60).
5.3. Calculate the partial derivative of the matching degree of the rules of the fuzzy controller model by (51a),
(51b).
5.4. Calculate the partial derivative of the matching degree of the rules of the fuzzy process model by (56a), (56b).
Eq. (59) is used to complete this derivative.
5.5. Compute third addend of (60).
5.6. Calculate the corresponding term iqJ of the Jacobian matrix.
(6). Repeat step 5 until all terms of the Jacobian matrix evaluated in the state X are computed. (see Fig.1)
As we reach this point, a general method is available for the calculation of the Jacobian matrix at a point of a fuzzy
control system identified on an input/output data basis.
6 SIMULATION AND EXAMPLE
Let the following plant given by its internal representation be:
1 1 2 1
2
2 1 2 2
2
2
x x x u
x x x u
(61)
This plant has an equilibrium point at the origin of the state space. Linearizing the nonlinear model given by (61)
around this point, the following system is obtained:
1 1 2 1
2 1 2
2x x x u
x x u
(62)
whose dynamic matrix is 1 2
1 0A
Eigenvalues of the matrix A are: 1 1 and 2 2 indicate that the system (61) is unstable, and the origins of the
state space act as a saddle point for this system.
For the implementation of this example, the plant dynamics is supposed to be unknown, so that Eq.(61) is only used

- 132 -
http://www.sj-ce.org
to obtain input/output data of the plant. T1T-S model of the plant has been obtained by the methodology based on
descending gradient developed in [17-18]. (see Appendix) The input/output data of the plant has been obtained by a
random number generator in the interval 1 2, 10,10x x [17].
FIG.1. ALGORITHM TO COMPUTE EQ. (60)
Now, once the plant dynamics is known, it is possible to design T1T-S model of controller that stabilizes the system
around the equilibrium point in the origin of the state space. (see Appendix)
We illustrate the IT2T-S FLS by extending the T1T-S FLS. Assume that uncertainties exist in the antecedents of
each rule, and extend the T1T-S FLS to a IT2T-S FLS by spreading antecedent MF stand deviation values ±a% (see
Appendix).
The Jacobian matrix of the IT2T-S fuzzy system evaluated in the equilibrium state by the “FuzJac’’ function is

- 133 -
http://www.sj-ce.org
-7.4678 11.1494
-74.4091 -47.7924J
To determine the control system stability by the application of Krasovskii’s theorem, it is obvious that
( ) ( )TJ X J X is negative definite in an environment of the equilibrium state.
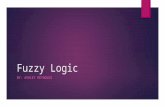
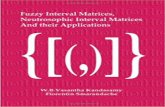
Fig.2 and Fig.3 show the comparison of the states for the T1 and IT2 T-S fuzzy system. The fuzzy closed loop
control systems are asymptotically stable in the origin of the state space. Furthermore, they show that the IT2 T-S
fuzzy system is better than the T1 T-S fuzzy system, respectively.
FIG.2. THE COMPARISON OF 1x t FOR THE T1 AND IT2 T-S FUZZY SYSTEM
FIG.3. THE COMPARISON OF 2x t FOR THE T1 AND IT2 FUZZY T-S SYSTEM
In order to show that the IT2 T-S fuzzy system can handle the measurement uncertainties, training data is corrupted
by a random noise. From Fig.4 to Fig.7, figures show the responses with disturbance a = 0.06 for the T1 and IT2
fuzzy T-S system, respectively. When the IT2 T-S fuzzy system is influenced by random disturbance, the effect is
very small, and the output trajectories of 1x t and 2x t have smaller amplitude than the trajectories without
random disturbance. The simulation results show that the IT2 T-S fuzzy system can handle unpredicted disturbance
and data uncertainties very well.
FIG.4. THE 1x t WITH DISTURBANCE FOR THE T1 FUZZY T-S SYSTEM

- 134 -
http://www.sj-ce.org
FIG.5. THE 1x t WITH DISTURBANCE FOR THE IT2 FUZZY T-S SYSTEM
FIG.6. THE 2x t WITH DISTURBANCE FOR THE T1 FUZZY T-S SYSTEM
FIG.7. THE 2x t WITH DISTURBANCE FOR THE IT2 FUZZY T-S SYSTEM
7 CONCLUSIONS
In this paper, we present a design of IT2T-S FLCS in details. Furthermore, Krasovskii’s method is introduced to
testify the sufficient condition for the asymptotic stability of IT2T-S FLCS. Later, the Jacobian matrix of a closed
loop fuzzy system is computed and an algorithm to solve the Jacobian matrix is proposed. Finally, the simulation
results show that the IT2T-S FLCS achieves the best tracking performance in comparison with the T1T-S FLCS.
Moreover, the IT2T-S FLCS can handle unpredicted internal disturbance and data uncertainties well.
ACKNOWLEDGMENT
The work was supported by the National Natural Science Foundation of China (11072090). The work was supported
by the Opening Project of Guangxi Key Laboratory of Automobile Components and Vehicle Technology, Guangxi
University of Science and Technology (2012KFMS12).

- 135 -
http://www.sj-ce.org
REFERENCES
[1] T. Takagi, M. Sugeno. Fuzzy Identification of Systems and Its Applications to Modeling and Control. IEEE Transaction on
Systems, Man, and Cybernetics, 1985, 15(1): 116-132
[2] M. Sugeno, G. Kang. Structure Identification of Fuzzy Model. Fuzzy Sets and Systems, 1988; 28(1): 15-33
[3] K. Tanaka, M. Sano. A robust stabilization problem of fuzzy control systems and its application to backing up control of a truck-
trailer. IEEE Transaction on Fuzzy Systems, 1994, 2 (2): 119-134
[4] K. Tanaka, T. Ikeda, H.O. Wang. Robust stabilization of a class of uncertain nonlinear systems via fuzzy control: quadratic
stabilizability h∞ control theory and linear matrix inequalities. IEEE Transaction on Fuzzy Systems, 1996, 4(1):1-13
[5] H.O. Wang, K. Tanaka, M.F. Griffin. An approach to fuzzy control of nonlinear systems: stability and design issues, IEEE
Transaction on Fuzzy Systems, 1996; 4(1): 14-23
[6] J.M. Mendel. On answering the question “Where do I start in order to solve a new problem involving interval type-2 fuzzy sets?”
Information Sciences, 2009; 179(19): 3418-3431
[7] Ming-Ying Hsiao, Tzuu-Hseng S. Li, J.-Z. Lee, etc, Design of interval type-2 fuzzy sliding-mode controller, Information Sciences,
2008, 178(6): 1696-1716
[8] Ondrej Linda, Milos Manic, Interval Type-2 fuzzy voter design for fault tolerant systems,Information Sciences, 2011, 181(14):
2933-2950
[9] Tsung-Chih Lin, Observer-based robust adaptive interval type-2 fuzzy tracking control of multivariable nonlinear systems,
Engineering Applications of Artificial Intelligence, 2010, 23(3): 386-399
[10] Yimin Li, Yijun Du, Indirect adaptive fuzzy observer and controller design based on interval type-2 T-S fuzzy model,Applied
Mathematical Modelling, 2012, 36(4): 1558-1569
[11] Kheireddine, C., Lamir, S., Mouna, G., Khier, B., 2007. Indirect adaptive interval type-2 fuzzy control for nonlinear systems.
International Journal of Modeling, Identification and Control 2, 106-119
[12] Yi-Min Li, Yuan-Yuan Sun, Type-2 T-S fuzzy impulsive control of nonlinear systems ,applied Mathematical Modelling, 2012,
36(6): 2710-2723
[13] Lin, T.C., Liu, H.L., Kuo, M.J.,Direct adaptive interval type-2 fuzzy control of multivariable nonlinear systems. Engineering
Applications of Artificial Intelligence, 2009a. 22, 420-430
[14] Tsung-Chih Lin, Observer-based robust adaptive interval type-2 fuzzy tracking control of multivariable nonlinear systems,
Engineering Applications of Artificial Intelligence, 2010, 23(3): 386-399
[15] J.M.Mendel. Advance in type-2 fuzzy set and systems. Information sciences, 2007, 177(1): 84-110
[16] A. Abbadi, L. Nezli, D. Boukhetala, A nonlinear voltage controller based on interval type 2 fuzzy logic control system for
multimachine power systems ,International Journal of Electrical Power & Energy Systems, 2013, 45(1): 456-467
[17] José M. Andújar, Antonio J. Barragán, A methodology to design stable nonlinear fuzzy control systems, Fuzzy Sets and Systems,
2005, 154: 157-181
[18] J.M. Andújar, J.M. Bravo. Multivariable fuzzy control applied to the physical-chemical treatment facility of a cellulose factory.
Fuzzy Sets and Systems, 2005, 150(3): 475-492
[19] J.M. Andújar, J.M. Bravo, A. Peregrín. Stability analysis and synthesis of multi variable fuzzy systems using interval arithmetic.
Fuzzy Sets and Systems, 2004, 148(3): 337-353
APPENDIX
The T1T-S fuzzy model of the plant:
IF 1x is GAUSSMF(−13.9,6.5) and 2x is GAUSSMF(−13.5,5.1) and 1u is GAUSSMF(−13.6,5.4) and 2u is GAUSSMF(−13.1,5.3)
THEN 1 1 2 1 216.7 1.93 1.26 0.114 0.235x x x u u
IF 1x is GAUSSMF(−6.02,5.1) and 2x is GAUSSMF(−5.03,4.1) and 1u is GAUSSMF(−6.85,5.03) and 2u is GAUSSMF(−5.24,5)
THEN 1 1 2 1 213.5 1.13 1.01 1.57 1.13x x x u u
IF 1x is GAUSSMF(0.68,4.1) and 2x is GAUSSMF(2.67,4.5) and 1u is GAUSSMF(1.62,4.7) and 2u is GAUSSMF(1.59,4.9) THEN
1 1 2 1 211.5 0.617 1.36 0.423 0.498x x x u u
IF 1x is GAUSSMF(8.54,5.5) and 2x is GAUSSMF(9.69,5.4) and 1u is GAUSSMF(9.24,5.2) and 2u is GAUSSMF(8.27,5.3) THEN
1 1 2 1 218.5 2.2 2.05 0.917 0.894x x x u u

- 136 -
http://www.sj-ce.org
IF 1x is GAUSSMF(−18.5,4.9) and
2x is GAUSSMF(−5.4,3.3) and 1u is GAUSSMF(−16.7,5.4) and
2u is GAUSSMF(−19.8,4.8)
THEN 2 1 2 1 25.91 003 130 68 222 244x e x x u u
IF 1x is GAUSSMF(−6.82,6.9) and
2x is GAUSSMF(−9.74,4.1) and 1u is GAUSSMF(−6.48,5.2) and
2u is GAUSSMF(−6.78,5.6)
THEN 2 1 2 1 23.04 003 10.8 52.7 15.3 10.3x e x x u u
IF 1x is GAUSSMF(1.28,6.2) and
2x is GAUSSMF(3.07,5.2) and 1u is GAUSSMF(1.37,5.6) and
2u is GAUSSMF(1.37,5.2) THEN
2 1 2 1 26.36 003 110 370 39.2 121x e x x u u
IF 1x is GAUSSMF(13.6,5.4) and
2x is GAUSSMF(18.4,5.1) and 1u is GAUSSMF(11.9,5.8) and
2u is GAUSSMF(13.6,5.6) THEN
2 1 2 1 25.76 003 88 515 19.2 62.4x e x x u u
A possible T1 controller fuzzy rules could be:
IF 1x is GAUSSMF(−8.34,4.4) and
2x is GAUSSMF(2.72,6.07)
THEN 1 10.0002 5.69u x
IF 1x is GAUSSMF(14.62,5.6) and
2x is GAUSSMF(−13.01,6.2)
THEN 1 1 20.00047 3.01 0.00385u x x
IF 1x is GAUSSMF(4.04, 5.5) and
2x is GAUSSMF(13.12, 5.3)
THEN 1 1 20.00044 2.62 0.00155u x x
IF 1x is GAUSSMF(−6.01, 6.1) and
2x is GAUSSMF(−9.72,6.2)
THEN 2 1 20.0004 1.83 8.42u x x
IF 1x is GAUSSMF(3.86,6.07) and
2x is GAUSSMF(1.6,6.54)
THEN 2 1 21.32 9.16u x x
IF 1x is GAUSSMF(14.2,5.2) and
2x is GAUSSMF(14.8,7.8)
THEN 2 1 20.000504 2.06 2.81u x x
The IT2T-S fuzzy model of the plant is the following:
IF 1x is GAUSSMF(−13.9,6.5(1±a%)) and 2x is GAUSSMF(−13.5,5.1(1±a%)) and 1u is GAUSSMF(−13.6,5.4(1±a%)) and 2u is
GAUSSMF(−13.1,5.3(1±a%))
THEN 1 1 2 1 216.7 1.93 1.26 0.114 0.235x x x u u
IF 1x is GAUSSMF(−6.02,5.1(1±a%)) and 2x is GAUSSMF(−5.03,4.1(1±a%)) and 1u is GAUSSMF(−6.85,5.03(1±a%)) and 2u is
GAUSSMF(−5.24,5(1±a%))
THEN 1 1 2 1 213.5 1.13 1.01 1.57 1.13x x x u u
IF 1x is GAUSSMF(0.68,4.1(1±a%)) and 2x is GAUSSMF(2.67,4.5(1±a%)) and 1u is GAUSSMF(1.62, 4.7(1±a%)) and 2u is
GAUSSMF(1.59,4.9(1±a%))
THEN 1 1 2 1 211.5 0.617 1.36 0.423 0.498x x x u u
IF 1x is GAUSSMF(8.54,5.5(1±a%)) and 2x is GAUSSMF(9.69,5.4(1±a%)) and 1u is GAUSSMF(9.24, 5.2(1±a%)) and 2u is
GAUSSMF(8.27,5.3(1±a%))
THEN 1 1 2 1 218.5 2.2 2.05 0.917 0.894x x x u u
IF 1x is GAUSSMF(−18.5,4.9(1±a%)) and 2x is GAUSSMF(−5.4,3.3(1±a%)) and 1u is GAUSSMF(−16.7,5.4(1±a%)) and 2u is
GAUSSMF(−19.8,4.8(1±a%))
THEN 2 1 2 1 25.91 003 130 68 222 244x e x x u u
IF 1x is GAUSSMF(−6.82,6.9(1±a%)) and 2x is GAUSSMF(−9.74,4.1(1±a%)) and 1u is GAUSSMF(−6.48,5.2(1±a%)) and 2u is
GAUSSMF(−6.78,5.6(1±a%))
THEN 2 1 2 1 23.04 003 10.8 52.7 15.3 10.3x e x x u u
IF 1x is GAUSSMF(1.28,6.2(1±a%)) and 2x is GAUSSMF(3.07,5.2(1±a%)) and 1u is GAUSSMF(1.37,5.6(1±a%)) and 2u is
GAUSSMF(1.37,5.2(1±a%))
THEN 2 1 2 1 26.36 003 110 370 39.2 121x e x x u u
IF 1x is GAUSSMF(13.6,5.4(1±a%)) and 2x is GAUSSMF(18.4,5.1(1±a%)) and 1u is GAUSSMF(11.9,5.8(1±a%)) and 2u is
GAUSSMF(13.6,5.6(1±a%))
THEN 2 1 2 1 25.76 003 88 515 19.2 62.4x e x x u u

- 137 -
http://www.sj-ce.org
A possible IT2T-S controller could be:
IF 1x is GAUSSMF(−8.34,4.4(1±a%)) and
2x is GAUSSMF(2.72,6.07(1±a%)) THEN 1 10.0002 5.69u x
IF 1x is GAUSSMF(14.62,5.6(1±a%)) and
2x is GAUSSMF(−13.01,6.2(1±a%)) THEN 1 1 20.00047 3.01 0.00385u x x
IF 1x is GAUSSMF(4.04,5.5(1±a%)) and
2x is GAUSSMF(13.12,5.3(1±a%)) THEN 1 1 20.00044 2.62 0.00155u x x
IF 1x is GAUSSMF(−6.01,6.1(1±a%)) and
2x is GAUSSMF(−9.72,6.2(1±a%)) THEN 2 1 20.0004 1.83 8.42u x x
IF 1x is GAUSSMF(3.86,6.07(1±a%)) and
2x is GAUSSMF(1.6,6.54(1±a%)) THEN 2 1 21.32 9.16u x x
IF 1x is GAUSSMF(14.2,5.2(1±a%)) and
2x is GAUSSMF(14.8,7.8(1±a%)) THEN 2 1 20.000504 2.06 2.81u x x
AUTHORS 1Li Li, born in Pucheng, Shanxi province, China, in Sep. 1964.
She graduated from Jiangsu University with a doctorate’s degree
in Agricultural Electrification and Automation in 2009.
She is Associate Professor working in Faculty of Computer
Science and Telecommunication Engineering, Jiangsu
University, Zhenjiang, China. She is currently engaged in the
following research fields: (1) Fuzzy Fault Detection and
Diagnosis;(2) Simulation and Intelligent Control;(3) Intelligent
Algorithm and Optimization.
2Yijun Du is a Graduate Student in Faculty of Science, Jiangsu
University, Zhenjiang, China.
3Yimin Li, born in Luoyang, Henan province, China, in 1963.
He obtained his doctorate in Control Theory and Control
Engineering from Nanjing University of Aeronautics and
Astronautics in 2005.
He is a Professor and Postgraduate Supervisor in Faculty of
Science, Jiangsu University, Zhenjiang, China. He is currently
engaged in the following research fields: (1) Modeling of
complex ecosystem and study of features of bio-system; (2) The
fuzzy control theory based on biological features; (3) The theory
and application of Bionics intelligent control; (4) Type-2 fuzzy
control methods.