Pseudo Newsgathering: Analyzing Journalists' Use of Pseudo ...

www.ietdl.org
IE
d
Published in IET Electric Power ApplicationsReceived on 15th November 2012Revised on 5th June 2013Accepted on 19th June 2013doi: 10.1049/iet-epa.2013.0088
T Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653oi: 10.1049/iet-epa.2013.0088
ISSN 1751-8660
Design and implementation of an observer-basedstate feedback controller for a pseudo direct driveMohammed Bouheraoua, Jiabin Wang, Kais Atallah
Department of Electronic and Electrical Engineering, The University of Sheffield, Mappin Street, Sheffield S1 3JD, UK
E-mail: [email protected]
Abstract: A pseudo direct drive (PDD) permanent magnet (PM) machine, realised by a mechanical and magnetic integration of aPM machine and a magnetic gear can achieve torque densities in excess of 60 kNm/m3. Since the torque in the PDD machine istransmitted to the load through a relatively low-stiff magnetic gear, undesirable speed/position oscillations become significant.This study addresses the pertinent issues associated with PDD operation and control. A full-state feedback (SFBK) controlstrategy has been employed and the feedback gains are optimally tuned by genetic algorithm against a defined performanceindex and under torque, current and voltage limits. To realise this control strategy at low cost, a reduced order observer hasbeen designed and implemented to reconstruct the system states required for the SFBK control. It has been shown that theproposed control strategy and tuning method are effective in suppressing torsional oscillation, and for improving PDD servooperation and control performance. Experimental results have demonstrated the effectiveness of the proposed control technique.
1 Introduction
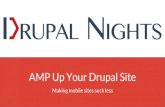
High torque, low-speed machines have increasingly beenused in wind turbines, ship propulsion systems and tractionapplications. It has been shown that a pseudo direct drive(PDD) permanent magnet (PM) machine, realised by amechanical and magnetic integration of a PM machine andmagnetic gear, can achieve torque densities in excess of 60kNm/m3 [1]. In addition, for large PDD PM machines atorque density of 110 kNm/m3 can be achieved, as reportedin [2]. The PDD design alleviates problems associated withmechanical gearboxes, such as acoustic noise andvibrations, the need for lubrication and maintenance, andfailures associated with fatigue and jamming [1].Fig. 1 shows the schematic of the PDD design. It comprises
two rotors: the high-speed rotor with two pole-pair magnets(ph = 2) and the low-speed rotor with 23 ferromagneticpole-pieces (ns = 23). The electromagnetic torque isproduced by the interaction of the two pole-pair magneticfield on the high-speed rotor with currents in the statorwinding. This torque is transmitted to the low-speed rotor,with a gear ratio Gr = ns/ph, by the interaction of the 21pole-pair (pl = 21) stationary PMs attached to the stator boreand the 21st space harmonic, which results from themodulation of the two pole-pair magnetic field onhigh-speed rotor by the 23 ferromagnetic pole-pieces oflow-speed output rotor. Since the torque is transmitted tothe load through a relatively low-stiff magnetic gear, speed/position oscillations are present and improved controlstrategies are required.Furthermore, overload protection is a significant advantage
of the PDD, since when subjected to a load torque, which maybe greater than the pull-out torque it should harmlessly slip.
Although this may not result in a physical damage, the timetaken for the machine to recover and resume normaloperation after the transient overload torque disappears willdepend on how fast the slip can be detected and how thecontrol strategy is adopted when the transient overloadtorque occurs.The servo control which includes two inertias connected by
a compliant mechanical coupling has been studied in [3–5].Proportional and integral (PI) control and its variant knownas integral plus proportional (IP) control are employed andspecifically tuned to reduce torsional oscillation. It is shownthat the inertia ratio between the load and motor directlyaffects the performance of the servo control system insuppressing resonance oscillations in the load. A torquetransducer is introduced between the motor and load in [6,7] and the torque feedback together with IP speed controlare used to improve the system damping. However, the useof torque transducer not only increases the system cost, butalso compromises the mechanical simplicity and integrity.A load torque disturbance observer has been proposed in[8] to suppress torsional oscillations. However, thisobserver is very sensitive to measurement noises,parameters change and non-linearity in the model. All thesecontrol techniques are concerned with compliant couplingwith very small torsional displacement, relatively largestiffness and linear torque–displacement characteristics.Most recently, a comprehensive analysis and designtechnique for speed control of electrical drives using the IPcontrol have been reported [9]. It has been shown that byappropriate design, the IP-based speed control has goodspeed tracking and disturbance (load) rejection property.However, the analysis and design techniques are confinedto the drives where torsional deflection is negligible.
643© The Institution of Engineering and Technology 2013

Fig. 1 Schematics drawing of the PDD design
a Radial cross-section of the PDDb Axial cross-section of PDD PM machine
www.ietdl.org
A drive train composed of a motor and load connectedthrough a compliant 1:1 magnetic coupling, where the inertiaratio between the motor and load is close to unity has beendemonstrated in [10, 11]. Since the magnetic gear is far moreflexible than the classical conventional mechanical couplingwith medium torsional stiffness, oscillations appear on theload side if conventional control is used. It has been shownthat an IP controller tuned against a fourth-order optimalintegral of time multiplied by absolute error (ITAE)polynomial can have good oscillation rejection characteristicsin comparison with the classic PI tuning. However, themagnetic coupling presented in [11] exhibits damping torquecaused by the eddy currents generated in the solidback-irons. The damping seems to help reducing theoscillations in the output. In contrast, the PDD exhibits verylittle damping, because in order to maximise efficiency, it ismanufactured using laminated electrical steel and thereforeeddy current losses are minimised. In addition to thelow-stiffness coupling, the gearing has significant effect onthe inertia ratio between the high- and low-speed rotors.Hence, the controller structure and design presented for thecompliant 1:1 magnetic coupling cannot provide sufficientdamping for the PDD operation. This can be demonstratedby applying the IP control structure on the PDD as will beseen in Sections 4 and 5.Since the two PDD rotors are coupled by magnetic gearing
force which exhibits relatively low- and non-linear stiffness, it
644© The Institution of Engineering and Technology 2013
is desirable that the PDD is fitted with a sensor on each rotor,a speed/position sensor on the high-speed rotor for electroniccommutation of the phase currents, and a speed/positionsensor on the low-speed rotor for speed/position control ofthe payload. However, this would increase the cost and maycompromise simplicity and integrity of the mechanicalassembly.Previous work on the PDD control has implemented two
types of controllers, a PI and a state feedback (SFBK)controller [12]. It has been shown that, because of themagnetic gearing and lack of damping, torsional oscillationswill result with the PI controller in the output (low-speedrotor), causing undesirable speed and position transients,increased copper loss in the motor and reduced performanceoverall. The poor PI control performance is because of itsstructure, which limits the capability of placing the poles ofthe closed-loop system in a desirable location to increasebandwidth and to improve damping. Wang and Atallah [12]suggested a SFBK controller as a replacement for the PIcontroller to reduce speed oscillations on the output. Theproposed structure should provide more freedom to placethe dominant poles of the closed-loop system in a desirablelocation, where the maximum damping and bandwidth isachieved with a given set of constraints. Linear quadraticregulator (LQR) has been used to tune the feedback gains.Although the SFBK controller has reduced oscillations ascompared with those with the PI controller, the PDD stillsuffer from excessive speed/position oscillations on theoutput because of an ineffective tuning. Further, noexperimental results which demonstrate effectivesuppression of torsional oscillation in the PDD systemshave been reported to date.This paper addresses the pertinent issues associated with
PDD operation and control. A full SFBK control strategyhas been employed and the feedback gains are optimallytuned by genetic algorithm (GA) against a definedperformance index and under torque, current and voltagelimits. To realise this control strategy at low cost, a reducedorder observer has been designed and implemented toreconstruct the system states required for the SFBK control.It has been shown that the proposed control strategy andtuning method are effective in suppressing torsionaloscillation, and for improving PDD servo operation andcontrol performance. Experimental results havedemonstrated the effectiveness of the proposed controltechnique.The paper is organised as follows. Section 1 outlines the
PDD machine structure, the issues associated with itsoperation and control, the current state-of-the art inaddressing similar control problems and the proposedsolution. Section 2 presents the PDD model and highlightsits dynamic characteristics and challenges for control.Section 3 describes the proposed SFBK controller structure,its implementation in the closed-loop system and thereduced order observer design. Section 4 details the SFBKcontroller and observer tuning with GA. Section 5 providesthe experimental validation of the proposed controller,where the experimental results are compared and discussed.
2 Modelling of the ‘Pseudo Direct Drive’
In the PDD, the high- and low-speed rotors are magneticallycoupled and the mechanical load is applied to the low-speedrotor. The torque is transmitted from the high-speed tolow-speed rotor. The equations that govern their motion are
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088

www.ietdl.org
as followsdvh
dt= Te
Jh− Tmax
JhGrsin ue
( )− Bh
Jhvh −
Kd
Jhphvh − nsvo
( )(1)
dvo
dt= Tmax
Jsin ue
( )− Bo
Jvo +
KdGr
J( phvh − nsvo) −
TLJ(2)
where ωh, Jh and Bh are the angular speed, the moment ofinertia and the viscous damping of the high-speed rotor,respectively, ωo, J and Bo are the angular speed, thecombined inertia of the low-speed rotor Jo and the load JL,and the combined damping coefficient of the low-speedrotor and load, respectively. Gr = ns/ph is the magnetic gearratio. TL is the load torque, Tmax is the pull-out torquereflected to the low-speed rotor and Te is theelectromagnetic torque produced by the q-axis current iq,when a surface-mounted magnet topology is employed forthe high-speed rotor, and is given by
Te =3
2ph wmiq
( )(3)
jm is the stator flux-linkage because of the PM field. Theelectromagnetic torque is transmitted to the low-speed rotorvia an equivalent magnetic spring with a stiffness given by
Kes =∂T
∂uo= nsTmax cos(ue) (4)
where θe is defined as the referred angular displacementbetween the high-speed rotor and low-speed rotor, given by
ue = phuh − nsuo (5)
θh and θo are the angular positions of the high- and low-speedrotors, respectively. From (5), it can be shown that the systemis stable when the stiffness Kes is positive, that is, only when
Fig. 2 Mechanical and dynamic representation of the PDD
a Equivalent mechanical transmission of PDD with gear ratio Gr = (ns/ph)b Transfer function block diagram with magnetic stiffness
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088
θe is within the range. 2πn− (π/2) > θe > 2πn + (π/2), n is aninteger number.The equivalent inertia of the high-speed rotor with the
magnetic gear seen by the low-speed rotor is obtained as
Je = G2r Jh (6)
Kd is the damping effect associated with the referredangular speed between the high- and low-speed rotorsbecause of eddy current loss in the high-speed rotor andiron loss in the ferromagnetic pole-pieces on the low-speedrotor.Fig. 2a shows the equivalent mechanical transmission
coupled by an 11.5:1 magnetic gear with low-stiffness andnon-linear spring characteristics.The transfer function block diagram of the PDD is shown
in Fig. 2b. Since the damping effect, Kd is very small ornegligible; it is set to zero in the control design, Thisrepresents the worst case, as in a real physical system thereis always some damping albeit it may be very small.The transfer function of the mechanical system in Fig. 2b
becomes [12]
vh(s)Te(s)
= s2 + v2a
Jes(s2 + v2n), va =
����Kes
J
√
vo(s)Te(s)
= va
Jes(s2 + v2n), vn = va
�������1+ J
Je
√ (7)
The un-damped natural frequencies ωn and ωa of the pole- andzero-pairs in (7) are referred to as the resonant andanti-resonant frequencies [13]. As can be seen, both transferfunctions contain an un-damped mode, and henceoscillation may occur if this mode is not adequatelydamped. With Je ≫ J , vn = va, oscillations occur on thehigh-speed rotor at the resonant frequency ωn, but are
645© The Institution of Engineering and Technology 2013

www.ietdl.org
filtered by its relatively large equivalent inertia. In contrast,the oscillations continue on the low-speed rotor.With Je ≪ J , the resonant frequency given by vn ≃�������Kes/Je√is dictated by the equivalent inertia and the
equivalent stiffness.The electrical dynamics of the PDD is similar to that of the
conventional surface-mounted brushless PM machine. Theyare given in terms of the d–q-axis currents by
diddt
= − R
Ldid +
veLqiqLd
+ vdLd
(8)
diqdt
= − R
Lqiq −
veLdidLq
+ vq − phcmvh
Lq(9)
Ld and Lq are the d- and q-axis motor inductances,respectively; R is the motor winding resistance per phase;Kt and Ke are the motor torque and back-emf constants,respectively. vd and vq, and id and iq are the d- and q-axis
Fig. 3 Schematic of PDD under observer-based full SFBK control
Table 1 PDD parameters
Jh, kgm2 3.8 × 10−3
Jo, kgm2 2.5 × 10−3
JL, kgm2 0.28
R, Ω 2jm, Wb 0.59Tmax, Nm 135Ld, mH 32.6 × 10−3
Lq, mH 32.6 × 10−3
Bh, Nm / rad / s 1.0 × 10−4
Bo, Nm / rad / s 2.0 × 10−4
Kd, Nm / rad / s 0.5 × 10−4
vomax, rad/s 30
vhmax, rad/s 345
Udc, V 435iqmax
, A 9
646© The Institution of Engineering and Technology 2013
voltages, and currents, respectively. ωe is the electricalspeed defined by ωe = ωhph.The parameters of the prototype PDD, shown in Fig. 8, are
summarised in Table 1.
3 Controller design
By examining the influence of control parameters of classicalPI- and IP-based control structures on the dominanteigenvalues (poles) of the closed-loop PDD drive system, itis shown that the torsional oscillation is mainly because ofvery poor damping of the dominant poles, but there areinadequate degrees-of-freedom (DOF) in the PI and IPcontrol to place the dominant pole in a desirable position.In order to provide adequate damping to the oscillatorymodes in the PDD dynamics, a full SFBK control has beenemployed for the PDD speed control, as shown in Fig. 3.It consists of the inner current control loops and outer speed
control loop. The same field-oriented control strategy forconventional brushless AC PM motors is employed tocontrol the d- and q-axis currents in the PDD machine. ThePI gains of the currents controllers are designed usingpole-zero cancellation [14].The current-loop control bandwidth fc is set to 400 Hz and
the resultant closed-loop time constant of the current controlis Tc. The PI gains of the current PI controller are given bythe following equation
Tc =1
2pfc
Kid = Kiq =R
Tc= 5026.5V/s
Kpd = Kpq =LdTc
= 81.93mH/s
(10)
It is well known that the influence of parameter variations of
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088

Fig. 4 Schematic of reduced order observer
www.ietdl.org
the electrical quantities (Ld, Lq, R and jm) on the dynamicresponse is minimised by feedback actions of the innercurrent control loop with sufficiently high bandwidth, and itis indeed a common practice to employ PI current controllerfor this purpose.The outer speed loop contains the proposed full SFBKcontroller structure. It should provide the PDD withrequired bandwidth and sufficient damping to eliminatetorsional oscillation. In the proposed implementation, theposition and speed of the high-speed rotor are measured.They provide the required feedback for electroniccommutation of the phase current under the field-orientcontrol. The other states required for the feedback controllerare obtained from a reduced order observer. The controllerhas one integral gain and four proportional gains. Theintegral gain is used to eliminate steady-state error and theproportional gains are related to the feedback of the systemstates, namely, the speed of the high-speed rotor ωh, thespeed of the low-speed rotor ωo and the referred load angleθe, so that sufficient DOF is provided in the feedbackcontrol to place the dominant poles of the closed system ina desirable location. The fourth proportional gain Ks isnewly introduced to the conventional SFBK control schemedescribed in [12] and it is employed to correct anydeviation that may occur in the speeds of the two rotors intransient caused by the low-stiff magnetic gear. Insteady-state ωo Gr = ωh, this gain has no or very little effecton the feedback system as can be seen in the followingequation
U = (vd − vh) + (voGr − vh)Ks
[ ]Ki
s− vhKvh
− voKvo− ueKue
(11)
In order to implement the SFBK controller, all the states mustbe available. However, for this application only the speed ofthe high-speed rotor is measured directly, and the other states,namely, the speed of the low-speed rotor ωo and the referredangle θe can only be estimated. The reduced order observershown in Fig. 4 can reconstruct the non-measurable part ofthe state vector for the system given by (12), from themeasured outputs, y, and controls, u
x = f (x) + Bu+ w(t)y = Cx+ v(t) (12)
where
x = xa xb[ ]
xa = vh
xb = vo, ue, TL[ ]T
B = 1
Jh, 0, 0, 0
[ ]TC = [1, 0, 0, 0]
u = Te
(13)
w(t) is the process noise associated with model uncertaintiesand v(t) represents the measurement noise. x and y denoteas the state vector and output vector, respectively.
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088
Assuming that all damping effect is negligible and the rateof change of the load torque is zero or it changes veryslowly compared with the dynamic response of theobserver, the vector function f(x) of the PDD dynamicsystem is given by
f (x) = f 1(x), f 2(x), f 3(x), f 4(x)[ ]T
f 1(x) = − Tmax
JhGrsin (ue)
f 2(x) =Tmax
Jsin ue
( )− TLJ
f 3(x) = phvh − nsvo
f 4(x) = 0
(14)
The Jacobian matrix F(x) = [∂f (X, U)/(∂X)] is given by
F(x) =
0 0 − Tmax
JhGrcos(ue) 0
0 0Tmax
Jcos ue
( ) − 1
Jph −ns 0 00 0 0 0
⎡⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎦
(15)
The observer design is to find the L matrix which can beselected to place, arbitrarily, the eigenvalues of Kxb, andhence, modifies the behaviour of the state estimation error.The poles of the observer are typically placed far to the leftof the dominant poles of the closed-loop SFBK system.Since the speed, ωh, from the high-speed rotor is directlymeasured through a resolver; the states of the low-speedrotor ωo, the referred angle θe and the load torque TL areestimated. The observer gain L is tuned with GA foroptimum performance as will be shown in Section 4, andthe relevant observer gain matrices are given in thefollowing equation
Kxb = Abb − LAab
Ky = Aba − LAaa
Ku = Gb − LGa
⎫⎪⎪⎬⎪⎪⎭ (16)
647© The Institution of Engineering and Technology 2013

www.ietdl.org
whereAbb =0
Tmax
Jcos uer
( ) − 1
J−ns 0 0
0 0 0
⎡⎢⎢⎣
⎤⎥⎥⎦
Aab = 0 − Tmax
JhGrcos (uer) 0
[ ]
Aba = 0, ph, 0[ ]T
Aaa = 0[ ]
Ga =1
Jh
Gb = 0, 0, 0[ ]T
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
(17)
θer is the referred angle at rated torque. It should be noted thatthe gain matrices of the observer are dependent on the loadinertia and the referred angle θe through load torque, and itssensitivity against inertia and load torque variation will bestudied in Section 4.3.
4 Controller tuning
In order to achieve desirable performance and effectivelysuppress torsional oscillation, it is essential that the controlgains should be optimally tuned. The system underconsideration is highly non-linear because of the effect ofmagnetic gearing, and voltage, torque and current limits. Itis possible to linearise the closed-loop system under a givenoperating conditions, and classical control designtechniques, such as pole-placement and frequency domaindesign, may be used for control tuning. However, thesetechniques are only valid for small signal excursion andtherefore the resultant controller will lack robustness withrespect to changes in operation conditions. In addition, thedesign techniques cannot take into account voltage andcurrent limits, and often lead to try and error approachcombined with time-domain simulation in order to ensurethat the controller behaves reasonably under these limits.With a large number of control gains to be tuned as is thecase with the problem at hand, these approaches becometedious and do not offer effective solutions. In the previouswork [12] on the PDD control with full SFBK, the controlgains are tuned based on the LQR technique. Since there isno direct link between a defined performance index and theQ and R matrices with which the control gains aredetermined, it is virtually impossible to optimise the controlgains for a given control bandwidth and required damping.Consequently, significant torsional oscillation is still presenteven with the SFBK controller, although the magnitude ofthe oscillation is lower than that of the PI controller. Thisillustrates the fact that unless effective tuning methods areused, the SFBK control may not be as effective as it shouldbe. The SFBK controller tuned with the LQR could notattain the desirable performance, since the cost functionwhich is specified by the Q and R matrices are not directlymapped to a performance criteria. These two matrices areusually tuned by a weighting factors as demonstrated in[15], or weighting factors chosen by GA as in [16]. Thus, itis not possible to determine whether the cost function issuitable for tuning systems to achieve desirable performancein an optimal manner.
648© The Institution of Engineering and Technology 2013
To ensure effective tuning of the SFBK gains, GA isemployed to select gains based on a defined performanceindex and gain ranges under a given set of physicalconstraints.GA is a stochastic global search method that mimics the
process of natural evolution. In each population, GA usesthe process survival of the fittest to generate a solutioncloser to the optimum. After each generation, a selectionprocess similar in essence to the natural biological evolutiondetermines the fittest elements to breed for the nextgeneration. The new population should have individualsbetter suited for their environment than the one it wascreated from.
4.1 Objective function
The objective function is used to provide a measure of howindividuals have performed in the problem domain. For thecontrol tuning problem, the optimal feedback gains willhave the lowest numerical value of the objective function.Thus, the ITAE defined in (18) has been selected as theperformance criteria. This performance index hasadvantages of producing smaller overshoots and lessoscillations than the integral of square error or integral ofthe AE [17]. ITAE provides the best selectivity of theperformance indices, because the integral of time multipliedby the squared error (ITSE) is less sensitive than ITAE [18]in controlling overshooting and oscillation.
ITAE =∫T0t e(t)| | dt (18)
4.2 Controllers tuning
GA starts by choosing the initial population of individualsbased on a given range and numerical representation in theform of a (m × n) matrix, where m is the number ofindividuals forming the first generation, n is the number ofparameters to be optimised in each individual. For instancen = 2 for a PI representing Kp and Ki, and n = 5 for theSFBK representing Kvh
, Kvo, Kue
, Ks and Ki. The fitnessof each individual is evaluated based on the minimumITAE. A percentage of the fittest individuals is selected forreproduction during which a crossover and mutationmethods are used to randomly alter genes of the individualto produce offspring. The fitness of the new individuals isevaluated, and the least fit in the population is replaced bythe new individuals. Fig. 5 describes the GA tuning processof controllers using the GA toolbox [19, 20] in MATLABSimulink, where N is the number of individuals in ageneration. For the purpose comparison, the gains forclassical PI and IP controls have also been optimally tunedby GA.The optimal gains for the PI, IP and full SFBK control of
the PDD obtained by the GA tuning are listed in Table 2.
4.3 Observer tuning
The gain matrix L is obtained using the Ackermann’s formulain MATLAB as follows
L = acker A′bb, A′
ab, P( )
(19)
where P is the vector containing the poles to be placed in thedesired location. Since the order of the reduced order observer
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088

Fig. 5 Flowchart of genetic algorithm tuning
www.ietdl.org
is 3, the desirable poles are selected to contain one negativereal pole and one complex conjugate pair, defined by threepositive parameters, k1, k2 and k3
P = −k1 complex −k2, k3( )
complex −k2, − k3( )[ ]
(20)
The observer parameters are further tuned in a similar mannerto the controllers. The error used to evaluate the fitness in GAis the difference between the measured output ωo in Fig. 2band observed output ωo in Fig. 4.The observer has been designed to have much higher
bandwidth than that of the mechanical quantities being
Table 2 Controller gains obtained by GA tuning
Proportional gains
PI Kp = 0.02 A / rad / sIP Kp = 0.22 A / rad / sSFBK Kvh
= 2 A / rad / sKvo
= 1.699 A / rad / sKue
= 9.7856, A/radKs = 0.5 (dimensionless)
Integral gains ITAEPI Ki = 0.686 A / rad 2.03IP Ki = 1.8 1 / s 1.80SFBK Ki = 210 1 / s 1.67
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088
observed. Electrical quantities are not part of the observerdesign and hence they do not affect its performance. It canbe seen from the Jacobian matrix of the observer in (15)that most parameters used in the observer are constant for agiven PDD machine. They include gear ratio Gr = (ns/ph),where ns and ph are physical constant quantities, themaximum torque transmission capability of the machineTmax and the inertias of the high-speed rotor and low-speedrotor, Jh and Jo, respectively. However, there are parameterswhich can vary such as the load inertia JL and the loadtorque TL, which is directly related to the observer throughthe referred angle θe. For this reason, the sensitivity of theobserver is analysed against load inertia and load torquevariations. Fig. 6a compares simulated and estimated speedresponses of the low-speed rotor when the load inertia isvaried from the nominal load inertia JLN , (1/2)JLN ,3× JLN, and 4× JLN and a step change of load torquefrom 0 to 100 Nm is applied at 2 s for duration of 3 s. Inthe simulations, the observer and SFBK controllerparameters are not modified from the design and tuningagainst the nominal value JLN . The measured responsewhich results from the nominal JLN is shown in Fig. 12a.These results clearly show that the observer is not sensitiveto load inertia variation from 0.5× JLN to 3× JLNHowever if the variations extend to 4× JLN , the trackingperformance of the observer deteriorates significantly duringthe transients.The second parameter that can affect observer performance
is the referred angle θe as it increases with the load torqueaccording to (21) against the required electromagnetictorque on the low-speed rotor. θe has been linearised at therated torque of 100 Nm in the observer design as describedin (17)
Tem = Tmax sin(ue) (21)
To test the sensitivity of the observer with respect to loadtorque variations, the drive plant will be subjected to a setof step changes in load torque from zero to the maximumtorque. The measured system responses under the stepchange of the rated load torque are shown in Fig. 12a. Twoadditional step changes in load torque equivalent to themaximum and half of the rated torque are also applied tothe drive at 2 s for duration of 3 s. The resultant responsesare shown in Fig. 6b. The observer has produced excellenttracking performance for all load torque changes in bothtransient and steady states. It is therefore evident that loadtorque variation does not have any significant effect on theobserver performance.It should be noted that the Jacobian and gain matrices of the
observer are not dependent on speed and therefore theobserver can perform equally well at very low or zero speed.
4.4 Complex frequency domain analysis
To examine the dynamic behaviour and the damping of theclosed-loop system in Fig. 3, the state-space equations ofthe closed-loop system with the proposed SFBK controllerhas been established and the Jacobian matrix under a givenoperating condition is derived. The transfer functionbetween the demand input speed and actual output speedcan be explicitly obtained. The detailed derivations can befound in [21]. Fig. 7a shows two most significant complexconjugate pole-pairs in the s-plane of the closed-loop speedcontrol system under the proposed SFBK controller whenthe rated load torque TL = 100 Nm is applied . The other
649© The Institution of Engineering and Technology 2013

Fig. 6 Observer sensitivity to parameters variation
a Effect of load inertia variation on observer responsesb Effect of load torque variation on observer responses
www.ietdl.org
poles are all on the negative real axis and far away from theorigin, and therefore not plotted.The complex conjugate pole-pair with greater negative real
is associated with interaction of the SFBK control with themechanical dynamics of the PDD. However, the dominantpole pair of the closed-loop system is the complexconjugate pole-pair with far less negative real and theimaginary close to the torsional resonant frequency given in(7). The load torque, motor/load inertia, gear ratio,magnetic damping and the stiffness of the magnetic gearinfluence the location of the dominant pole pair, and hencethe dynamic behaviour of the closed-loop drive system. The
650© The Institution of Engineering and Technology 2013
goal of the speed control design is to alter the dominantpoles to maximise the damping and attainable bandwidthunder a given set of physical constraints, which includevoltage, current and torque limits.Although PI control is most widely used in commercial
variable speed drives, it is important to understand itslimitation on suppressing torsional oscillation in the PDD.Further a variant of PI control, commonly known as IPcontrol, has also been applied to suppression of torsionaloscillation with compliant coupling or magnetic coupling in[4, 5, 11]. Therefore both PI and IP controllers tuned withGA have also been applied to the PDD speed control and
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088

Fig. 7 Closed-loop system of the PDD in frequency domain
a Poles distribution of the proposed controllerb Dominant poles comparison
www.ietdl.org
results are used as a benchmark for the purpose of comparisonwith the proposed SFBK design.Fig. 7b shows the distribution of the dominant pole-pairs,
which result with the SFBK, PI and IP controllers. All threecontrollers are optimally tuned by GA under the sameoperational condition and constraints. It is evident that theproposed SFBK controller provides much greater dampingand bandwidth to the system than the PI and IP control. Itshould be noted that the damping, resulting from the PIcontrol is very low, and therefore an oscillatory response isunavoidable. The damping with the IP control is, however,improved. This is due to the fact that the IP has two DOFin the control design as compared with one DOF PI control[9].The effect of the load inertia JL on the dominant pole-pair
and the system performance has also been investigated. It hasbeen shown that the GA-tuned SFBK control is robust withrespect to load torque and inertia variation, whereas the PIcontrollers appear to be more sensitive. However, the IPcontrol is very sensitive to the inertia variation, and theresulting damping decreases significantly with the change inthe load torque or inertia. Details are given in [21]. Thesefindings are consistent with the time-domain simulationsand experimental results as have been shown previouslyand will be shown subsequently.
5 Experimental results and discussion
The proposed controller has been validated with a speciallydesigned and built test rig as shown in Fig. 8. The PDDmachine is coupled to the PM load machine via a 10:1inline gear box in order to provide sufficient load torque forthe PDD operation in speed control mode. The iq currentdemand resulted from the speed controller (PI/IP/SFBK) issent from a dSPACE 1103 real-time platform to a
Fig. 8 PDD in the test rig
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088
commercial drive in every 100 μs sampling interval or at10 kHz sampling rate. The drive performs current regulationand electronic commutation via a three-phase inverter byusing the position signal from the high-speed rotor and theiq demand. The load torque is applied by the load machinevia a commercial drive operating in torque control mode.The speed/position of the high-speed rotor is measured witha resolver, and an encoder is placed on the low-speed rotorfor the purpose of monitoring its speed/position only. Forthe purpose of comparison and validation, all threeGA-tuned controllers, SFBK, PI and IP are implementedand their performance tested.To observe the speed response, the low-speed rotor of the
PDD is accelerated from zero to 100 rpm, and after 2 s aload torque of 100 Nm is applied by the load machine forduration of 3 s. Experimental results are shown in Figs. 9–11.Fig. 9 shows the measured responses of the PDD under the
PI controller. It can be seen that undesirable oscillations,which result from the poor damping in both rotor speeds,are very significant.Fig. 10 shows the measured responses of the PDD under
the IP controller, where an improved speed tracking anddisturbance rejection is achieved in comparison with the PIcontrol. However, oscillations still appear when the load isapplied or removed.Fig. 11 shows the measured responses of the PDD under
the proposed SFBK controller, where the controller exhibitsgood disturbance rejection and speed tracking, with
Fig. 9 Measure PDD response under PI control
651© The Institution of Engineering and Technology 2013

Fig. 11 Measured PDD response under SFBK control
Fig. 12 Measured responses with SFBK
a Low-speed rotor response estimated vo and measured ωo
b dq currents i∗d, i∗q and measured id, iq
Fig. 10 Measured PDD response under IP control
www.ietdl.org
significant reduction in oscillations. The slow harmonic notedin steady state, which occurs when every revolution is causedby eccentricity in the resolver.The SFBK is realised using a reduced observer. Fig. 12a
shows the measured speed ωo against the estimated speedvo from the reduced order observer in real time. As will beseen, the estimated vo follows the measured ωo very well.Fig. 12b shows the demand and measured iq and id
currents, which result with the SFBK controller when arated load of 100 Nm is applied at t = 2 s for a duration of3 s. The q-axis current responds rapidly to the load torquechange albeit high-frequency current ripples because ofpulse width modulation are present. There is a small d-axiscurrent control error because of imperfect auto phasing ofthe commercial drive, which is about five electrical degrees.Furthermore, since the drive does not output id and iqcurrents, these are determined in real time from themeasured phase currents and the measured position of thehigh-speed rotor. Therefore any error in the auto phasingwould appear as an offset.It is evident from these experimental results that torsional
oscillation, which results with optimally tuned PI and IPspeed controllers, are still present in the PDD machineoutput. However, by employing the proposed SFBK
652© The Institution of Engineering and Technology 2013
controller, these oscillations are virtually eliminated and atthe same time the disturbance rejection property of the PDDdrive is improved.
6 Conclusions
The proposed control structure and design methods have beensuccessfully implemented to control the PDD in speed modesubject to full-rated load variation. Torsional oscillationsobserved on the PDD with the conventional PI controllerhave been eliminated with the proposed control techniqueand GA tuning method. Furthermore, it has been shownthat the combination of a hardware sensor on thehigh-speed rotor and an observer has made it possible forthe PDD to operate with a single sensor withoutcompromising the performance.The simulations and experiments demonstrate that GA
offered an effective platform to tune controllers forsystems with complex and non-linear characteristicsagainst a defined performance index. The proposed tuningmethod makes it possible to achieve optimal performancefor the PDD operation within the torque, current andvoltage limits.
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088

www.ietdl.org
7 References1 Atallah, K., Rens, J., Mezani, S., Howe, D.: ‘A novel ‘pseudo’direct-drive brushless permanent magnet machine’, IEEE Trans.Magn., 2008, 44, pp. 4349–4352
2 Powell, D.J., Calverley, S.D., de Wildt, F., Daffey, K.: ‘Design andanalysis of a pseudo direct-drive propulsion motor’. Proc. Fifth IETInt. Conf. Power Electron, Machines and Drives (PEMD 2010), 2010,pp. 1–2
3 Hori, Y., Sawada, H., Yeonghan, C.: ‘Slow resonance ratio control forvibration suppression and disturbance rejection in torsional system’,IEEE Trans. Ind. Electron., 1999, 46, pp. 162–168
4 Zhang, G.: ‘Speed control of two-inertia system by PI/PID control’,IEEE Trans. Ind. Electron., 2000, 47, pp. 603–609
5 O’Sullivan, T.M., Bingham, C.M., Schofield, N.: ‘High-performancecontrol of dual-inertia servo-drive systems using low-cost integratedSAW torque transducers’, IEEE Trans. Ind. Electron., 2006, 53,pp. 1226–1237
6 O’Sullivan, T.M.: ‘Enhanced performance of servo-dive systems byshaft-torque feedback’. PhD thesis, The University of Sheffield, 2005
7 O’Sullivan, T.M., Bingham, C.M., Schofield, N.: ‘Observer-basedtuning of two-inertia servo-drive systems with integrated SAW torquetransducers’, IEEE Trans. Ind. Electron., 2007, 54, pp. 1080–1091
8 Jong Nam, Y., Su, J., Yong Il, K., Yong Chun, K.: ‘Robust disturbanceobserver for two-inertia system’, IEEE Trans. Ind. Electron., 2012, PP,pp. 1–1
9 Harnefors, L., Saarakkala, S.E., Hinkkanen, M.: ‘Speed control ofelectrical drives using classical control methods’, IEEE Trans. Ind.Appl., 2013, 49, pp. 889–898
10 Montague, R.G., Bingham, C.M., Atallah, K.: ‘Characterisation andmodelling of magnetic couplings and gears for servo control systems’.
IET Electr. Power Appl., 2013, Vol. 7, Iss. 8, pp. 643–653doi: 10.1049/iet-epa.2013.0088
Fifth IET Int. Conf. Power Electron Machines and Drives (PEMD2010), 2010, pp. 1–6
11 Montague, R.G., Bingham, C.M., Atallah, K.: ‘Servo control ofmagnetic gears’, IEEE/ASME Trans. Mechatron., 2011, PP, pp. 1–10
12 Wang, J., Atallah, K.: ‘Modeling and control of ‘pseudo’ direct-drivebrushless permanent magnet machines’. Proc. IEEE Int. ElectricMachines and Drives Conf. 2009 (IEMDC’09), pp. 870–875
13 Vukosavic, S.N., Stojic, M.R.: ‘Suppression of torsional oscillations in ahigh-performance speed servo drive’, IEEE Trans. Ind. Electron., 1998,45, pp. 108–117
14 Leonhard, W.: ‘Control of electrical drives’ (Springer, 2001, 3rd edn.)15 Jun-Keun, J., Seung-Ki, S.: ‘Kalman filter and LQ based speed
controller for torsional vibration suppression in a 2-mass motor drivesystem’, IEEE Trans. Ind. Electron., 1995, 42, pp. 564–571
16 Mei, T.X., Goodall, R.M.: ‘LQG and GA solutions for active steering ofrailway vehicles’, IEE Proc. Control Theory Appl., 2000, 147,pp. 111–117
17 Maiti, D., Acharya, A., Chakraborty, M., Konar, A., Janarthanan, R.:‘Tuning PID and PIID controllers using the integral time absoluteerror criterion’. Fourth Int. Conf. Information and Automation forSustainability, 2008 (ICIAFS 2008), pp. 457–462
18 Dorf, R.C., Bishop, R.H.: ‘Modern control systems’ (Prentice-Hall,2004, 10th edn.)
19 Chipperfield, A.J., Fleming, P.J.: ‘The MATLAB genetic algorithmtoolbox’, IEE Colloq. Appl. Control Tech. MATLAB, 1995, pp. 10/1–10/4
20 Chipperfield, A.J., Fleming, P.J.: ‘Multiobjective gas turbine enginecontroller design using genetic algorithms’, IEEE Trans. Ind.Electron., 1996, 43, pp. 583–587
21 Bouheraoua, M., Wang, J., Atallah, K.: ‘A complex frequency domainanalysis of a closed loop controlled pseudo direct drive’. 2012 XXthInt. Conf. Electrical Machines (ICEM), 2012, pp. 2428–2434
653© The Institution of Engineering and Technology 2013



![Efficient Pseudo-Relevance Feedback Methods for Collaborative Filtering Recommendation [ECIR '16 Slides]](https://static.fdocuments.us/doc/165x107/58a8398c1a28ab30658b4d11/efficient-pseudo-relevance-feedback-methods-for-collaborative-filtering-recommendation.jpg)