
Design and Analysis of Digital Direct-Detection Fiber ...optcom/Dissertations/Dissertation...Design...
139
Design and Analysis of Digital Direct-Detection Fiber-Optic Communication Systems Using Volterra Series Approach A Dissertation Presented to the Faculty of the School of Engineering and Applied Science University of Virginia In Partial Fulfillment of the requirements for the Degree of Doctor of Philosophy (Electrical Engineering) by Kumar V. Peddanarappagari October, 1997
-
Upload
phungquynh -
Category
Documents
-
view
217 -
download
4
Transcript of Design and Analysis of Digital Direct-Detection Fiber ...optcom/Dissertations/Dissertation...Design...

Design and Analysis of Digital Direct-Detection Fiber-Optic CommunicationSystems Using Volterra Series Approach
A Dissertation
Presented to
the Faculty of the School of Engineering and Applied Science
University of Virginia
In Partial Fulfillment
of the requirements for the Degree of
Doctor of Philosophy
(Electrical Engineering)
by
Kumar V. Peddanarappagari
October, 1997

Abstract
Optical fiber communication systems are the most efficient means of handling the heavy data
traffic in this information age. Efforts are being made to increase the already phenomenal capacity
of these high bandwidth communication systems. Highly coherent optical sources that can generate
high power narrow pulses are being developed and fiber amplifiers are making repeaterless transmis-
sion over long distances possible. Considerable attention is being paid to the limitations placed on
these systems by linear dispersion, fiber nonlinearities, and amplified spontaneous emission (ASE)
noise from fiber amplifiers. However, most of the analysis is based on single pulse-propagation
experiments and simplified analytical expressions; pulse-to-pulse interactions are generally ignored.
The design of these systems is still empirical due to lack of analytical expressions for the output field
in terms of input, fiber, and amplifier parameters. This study develops analytical tools to analyze
and design systems to reduce the influence of linear dispersion, fiber nonlinearities, and ASE noise
in single-user and multi-user systems.
The generalized nonlinear Schroedinger (NLS) wave equation may be used to explain the effects
of linear dispersion and fiber nonlinearities on the evolution of the complex envelope of the optical
field in an optical fiber. The NLS equation is typically solved using numerical (recursive) methods.
In this work, a Volterra series based nonlinear transfer function of an optical fiber is derived based
on solving the NLS equation in the frequency-domain and retaining only the most significant terms
(Volterra kernels) in the resulting transfer function. Single pulse-propagation in single-mode optical
fibers is studied and the results are compared to available literature which uses numerical solutions.
The linear portion of the above model is then used for the theoretical study of the effects of
phase noise on linear dispersion in single-mode fiber-optic communication systems using a direct-
detection receiver. The effect of coherence time on dispersion, nonlinear interference (pulse-to-
pulse interactions), and intensity noise on the performance of a single-user communication system
is studied. A study of the effects of phase uncertainty in the received pulses due to timing jitter in
ii

modern lasers is also presented.
Using the Volterra series transfer function (VSTF), the effects of linear dispersion and fiber
nonlinearities on the performance of single-user fiber-optic communication systems are studied;
the criterion used is the signal-to-interference ratio (SIR) of intensity of the optical field and an
upper bound on the probability of error at the receiver. The model helps us choose input pulse
parameters to maximize the SIR (minimize probability of error) and design the complete optical
link or design lumped nonlinear equalizers at the receiver to compensate for the effects of linear
dispersion and fiber nonlinearities. Using the analytical expressions provided by the VSTF and the
upper bound on the probability of error, optimal dispersion parameters for the fiber segments in a
fiber amplifier based optical communication system are obtained to minimize the linear dispersion,
fiber nonlinearities and ASE noise. The effect of input power levels and amplifier gains on the system
performance in several different possible configurations of a point-to-point optical communication
system is studied. Finally, useful mathematical expressions for studying the nonlinear effects in
WDM systems are derived and possible ways of optimally extracting the information transmitted by
different users are discussed.
iii

Contents
1 Introduction 1
1.1 Fiber-optic Communication Systems . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Optical Transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Optical Fiber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Linear Attenuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.2 Linear (Chromatic) Dispersion . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.3 Fiber Nonlinearities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4 Optical Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5 Optical Receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6 System Analysis and Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Dissertation Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 Signal Degradations within Fiber-optic Systems 22
2.1 Degradations Caused by Laser Source Imperfections . . . . . . . . . . . . . . . . 22
2.2 Degradations Caused by the Optical Fiber . . . . . . . . . . . . . . . . . . . . . . 25
2.2.1 Nonlinear Schroedinger Wave Equation . . . . . . . . . . . . . . . . . . . 26
2.2.2 Linear Dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.3 Nonlinear Phenomenon . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.4 Optical Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3 Photo-detector and Receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
iv

2.4 Performance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3 Volterra Series Transfer Function (VSTF) 40
3.1 Derivation of Volterra Series Transfer Function . . . . . . . . . . . . . . . . . . . 43
3.2 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3 Potential Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3.1 Two-signal Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3.2 Nonlinear Equalizer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.3.3 Optimal Input Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.4 Summarized Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4 Linear Dispersion in Fiber-optic Communications 68
4.1 Derivation of SIR for Arbitrary Light Source . . . . . . . . . . . . . . . . . . . . . 69
4.1.1 Completely Coherent Light . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.1.2 Completely Incoherent Light . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.2 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.2.1 Communication System Performance . . . . . . . . . . . . . . . . . . . . 78
4.3 Summarized Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5 System Design 89
5.1 Transfer Function of the System . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.2 Receiver Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.3 Modified Chernoff Bound (MCB) . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.4 Design Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.5 Concluding Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6 Conclusions and Future Work 110
6.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
v

6.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
A Analysis of WDM Systems Using VSTF method 116
vi

List of Figures
1.1 A block diagram of a typical fiber-optic communication system. . . . . . . . . . . 3
3.1 Normalized square deviation of the output field for no Raman effect and no dis-
persion for different input peak powers. The SSF method from the true solution is
shown with lines, the third-order VSTF method from the true solution is shown with
’ � ’, and the fifth-order VSTF method from the true solution is shown with ’+’. . . 50
3.2 Normalized square deviation of the output field for no Raman effect for different
input peak powers the third-order VSTF method from the SSF method, shown with
lines, and the fifth-order VSTF method from the SSF method, shown with ’ � ’. . . 52
3.3 Magnitude squared of the Fourier transform of output field. . . . . . . . . . . . . . 53
3.4 Normalized square deviation of the output field of third- (shown with lines) and fifth-
order VSTF method (shown with ’ � ’) from SSF method, showing the dependence
of NSD on input RMS pulse-width for a length of ��������
km. . . . . . . . . . . . 54
3.5 Interference-to-signal ratio due to the presence of a pump pulse at different frequencies. 58
3.6 Plots of output intensity of completely coherent light for different power levels. . . 62
3.7 Plot of RMS widths of output pulses, showing the effect of peak input power on
dispersion of the input pulse. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.8 Output SIR as a function of symbol period for different power levels. . . . . . . . . 65
3.9 Output SIR as a function of peak pulse power for different symbol periods. . . . . 66
vii

4.1 Output pulse shapes for different levels of coherence of light for input pulses of�
psec RMS width: (a) GVD dominant case (b) operation at zero-dispersion wave-
length, ��� . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.2 Plot of RMS pulse-widths of output pulses, showing the effect of coherence time on
dispersion: (a) GVD dominant case (b) operation at zero-dispersion wavelength, ��� . 77
4.3 Plots of different waveforms of expected received signal (signal and mean nonlinear
interference) and ����� ������������� showing the effect of pulse separation on the nonlin-
ear interference: (a) GVD dominant case (b) operation at zero-dispersion wavelength. 79
4.4 Plot of SIR � , SIR ��� , SIR �� , SIR � , and SIR ��� showing the effect of coherence time
and timing jitter for a fixed symbol period of � � psec and a pulse-width of�
psec,�
’s indicate the asymptotic values, �� � �and �! �#" , calculated from formulae in
Sections 4.1.1 and 4.1.2: (a) GVD dominant case, (b) operation at zero-dispersion
wavelength, ��� . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.5 Plot of SIR � (shown with ’o’s), and SIR ��� , showing the effect of coherence time
for an input RMS pulse-width of�
psec and different symbol periods for (a) GVD
dominant case (b) operation at zero-dispersion wavelength. . . . . . . . . . . . . . 83
4.6 Plot of the (a) SIR � (shown with ‘o’s) and SIR �� , and (b) SIR $ showing the effect of
coherence time for a symbol period of � � psec for different pulse-widths for a GVD
dominant case. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.7 Plot of the (a) optimal input pulse-widths and (b) SIR $ ’s for optimal pulse-width for
different symbol periods for a GVD dominant case. . . . . . . . . . . . . . . . . . 86
5.1 Typical communication systems used to demonstrate the design procedure. . . . . . 92
5.2 Block Diagram of the cascade of % th fiber amplifier and % th fiber segment. . . . . . 93
5.3 Input pulse shape used. The input pulse corresponding to &'� is shown with a solid
line to stress that this is the bit of interest. . . . . . . . . . . . . . . . . . . . . . . 102
viii

5.4 Upper bound on the probability of error using the optimal dispersion map for differ-
ent configurations shown in Figure 5.1 as a function of amplifier gain for different
input powers � . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
5.5 The optimal total accumulated dispersion parameter determined by minimizing the
MCB for different configurations shown in Figure 5.1 and for different input powers.
The lines indicate dispersion parameters for amplifier gains close to the optimal
amplifier gains and the ’ � ’ indicate dispersion parameters for amplifier gains higher
by��� �
dB per amplifier than the optimal amplifier gains. . . . . . . . . . . . . . . . 107
ix

List of Tables
3.1 Various components of the output signal due to fiber nonlinearities and the presence
of pump pulse. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
x

Chapter 1
Introduction
The main objectives of this study are to (i) derive analytical expressions for the nonlinear (Volterra
series) transfer function of an optical fiber, (ii) analyze the effect of phase noise (or source coherence)
on linear dispersion in direct-detection fiber-optic communication systems, (iii) analyze the effects
of linear dispersion and fiber nonlinearities in fiber-optic communication systems that use direct-
detection receiver, (iv) develop a mechanism to choose input pulse parameters to maximize the
signal-to-interference ratio (SIR) of light incident on the photo-detector, and (v) design the entire
fiber-optic communication link to minimize the effects of linear dispersion, fiber nonlinearities, and
amplified spontaneous emission (ASE) noise from the fiber amplifiers. This chapter briefly describes
how an optical fiber communication system works and how linear dispersion, fiber nonlinearities,
and ASE noise affect its performance.
1.1 Fiber-optic Communication Systems
The last decade has witnessed an unprecedented increase in data traffic and one main strategy has
emerged to handle this increase. Fiber-optic networks are used to transfer data between remote but
fixed switches at very high data rates. Data is then transferred to the nearby destinations by ei-
ther wireless (possibly mobile) or by wired copper links. The huge bandwidth of the optical fiber
is exploited to obtain high data rates between these switches, which are separated by large dis-
1

tances. Optical communication systems are becoming more and more complex due to attempts to
utilize the enormous bandwidth provided by the optical fiber; optimal system design is of great
interest. In spite of the possibility of communicating at rates of Terabits per second (Tbps) using
optical fibers, the linear dispersion in the fibers, fiber nonlinearities, ASE noise from optical am-
plifiers, and the low-speed electronic interfaces at the destinations limit data rates to Gigabits per
seconds (Gbps). To exploit this large bandwidth, a large number of channels are multiplexed with
an electronic interface for each channel on the same fiber. These channels are either multiplexed in
time (time-division multiplexed, TDM), wavelength (wavelength-division multiplexed, WDM), or
in signature-sequence (code-division multiplexed, CDM). Since optical links use guided medium,
they are expensive to install and maintain; multiplexing numerous channels is an effective approach
to minimize the cost.
Figure 1.1 shows a block diagram of a typical fiber-optic communication system using erbium
doped fiber amplifiers (EDFAs). A (possible) booster amplifier used to increase power transmitted
by a low power laser is shown, a possible receiver pre-amplifier used to increase the sensitivity of
the receiver, and a few in-line amplifiers used to compensate for the power losses in the optical fiber
are also shown.
Current commercial fiber-optic communication systems (e.g., transpacific fiber-cable system
(TPC-5), fiber-optic loop around the globe (FLAG) [1] system) use semiconductor lasers operat-
ing at a wavelength of � �� � � � � m, that can generate a series of
���- � � � psec pulses of maximum
instantaneous power of � � mW. This stream of pulses is on-off modulated by the data to be trans-
mitted (i.e., each bit is transmitted by either sending or not sending a pulse). In WDM system, each
user’s pulse stream is modulated on a carrier with a different wavelength, and these pulse streams
are multiplexed to increase the overall data transfer possible on a single fiber. At the receiver, the
pulse stream from each user are separated by optical filtering and individual stream of pulses is
photo-detected, (sometimes integrated over the symbol period) and compared with a threshold to
determine whether a pulse is present in a given slot or not.
2

� � �� � � � ������ � �
� � � � ������� � � � ������
Laser Receiver
BoosterAmplifier
ReceiverPre-amplifier
EDFA EDFA EDFA
��� ��� �. . .
Figure 1.1: A block diagram of a typical fiber-optic communication system.
Long-distance fiber-optic systems can broadly be categorized into terrestrial long-haul systems
and undersea systems. Networking is an important issue for terrestrial systems whereas undersea
systems are currently point-to-point links. Terrestrial systems are typically of��� �
km in length,
operating with optical amplifiers spaced at��� �
km. The undersea systems are typically of � ��� � km
in length, with the amplifier spacing of about � � km. The amplifier spacing is small to keep the
accumulated ASE noise from the large number of amplifiers to a minimum.
Unfortunately, the information transfer is not perfect. Laser imperfections like phase noise,
timing jitter, modal distribution of light from a laser, and nonlinearities introduced by the modulation
process affect the performance of a digital communication system. Linear attenuation, dispersion,
nonlinearities from the fiber, and ASE noise from optical amplifiers limit the data rate that can be
achieved and the number of users that can be placed on a given optical fiber. In addition, detector
response time, the statistical nature of the photo-detection process, which introduces shot noise, and
thermal noise from the electronic circuits increase the probability of error considerably.
1.2 Optical Transmitter
Most of the study of lasers in the recent past has concentrated on the development of highly coherent
lasers that can generate pulses as short as�
psec with coherence times as large as� � sec. It is hoped
that because of the availability of such short pulses, very high data rates can be achieved and using
low attenuation and low dispersion fibers (or using fiber amplifiers with dispersion compensation),
the performance of the optical fiber communication systems can be increased enormously. However,
such short pulses suffer more from linear dispersion and fiber nonlinearities, even when we use these
3

low attenuation and low dispersion fibers. For a given fiber length, it has been shown that because
of chromatic (linear) dispersion, the received pulses are wider if a short pulse is sent than if a wider
pulse is transmitted (as long as the input RMS pulse-width is smaller than� �
psec) [2, 3].
The stream of pulses from the laser is modulated with the data stream to be transmitted. This
modulation can be done either internally or externally. An internal modulator is driven by the elec-
tric current representing the data stream and the output of the laser is the modulated output. External
modulation involves modulating the stream of pulses from the laser with the data stream. Either
method of modulation introduces mild nonlinearities (produces chirp), which affects the perfor-
mance of the system [4, 5]. Typically the laser and the modulator are packaged together to reduce
coupling losses and other stray effects.
When a laser is on-off modulated with electric pulses representing the data stream, there is a
delay between the actual generation of the optical pulse from the time the electric pulse is applied.
This delay depends on the optical power build-up in the laser, which depends upon the bias level
of the semiconductor laser diode. When the electrical pulse exceeds the bias level of the laser,
the optical build-up starts [6]. The quantum component of the intensity noise (is an important
consideration in analog communication systems, where it is called relative intensity noise (RIN) [7])
adds to this signal making the actual pulse generation time random, giving rise to random timing
jitter. In mode-locked lasers, the timing jitter has a periodic autocorrelation properties owing to the
saturation of the laser gain medium. Timing jitter is typically on the order of�
psec for pulse-widths
of about � � psec [8].
In most studies of optical communications, it is assumed that the lasers generate monochromatic
light; however, because of finite cavity length in the laser oscillator, the light produced by a laser con-
sists of numerous distinct modes, each having very small line-width. These spectral lines (modes)
are broadened by various mechanisms in the laser as well as the fiber. Homogeneous broadening
is caused by the linear dispersion of the laser gain medium. Inhomogeneous broadening is mainly
due to (i) Doppler broadening, due to different atoms in the laser medium having different kinetic
4

energies and hence having different apparent resonance frequencies as seen by the applied signal,
and (ii) lattice broadening, in which various atoms see different frequencies due to their positions in
the lattice (local surrounding). These broadening mechanisms increase the line-width of each mode
generated, producing phase noise. Modulation with the pulse shape and fiber nonlinearities also
broaden the already broadened spectrum, increasing the severity of the linear dispersion and fiber
nonlinearities. It is well understood in the literature that the broader the line-width (i.e., the more
the phase noise), the worse the dispersion in direct-detection receivers [9, 10].
Alternatively, the phase noise at the laser can be mathematically modeled as randomly occurring
spontaneous emission events [6], which cause random changes (in magnitude and sign) in the phase
of the electro-magnetic field generated by the laser. Therefore, as time evolves, the phase executes
a random walk away from the value it would have had in the absence of spontaneous emission.
The phase noise spectrum has two components, one low frequency component that has�����
or�������
characteristic up to around�
MHz, and a white component (quantum noise) that is associated with
quantum fluctuations and is the principal cause of line broadening. Analysis of the much smaller
low-frequency component is quite tedious and attention can be restricted to quantum noise only.
It has been recognized that phase noise can severely affect the performance of coherent detection
of the information bearing signal [11, 12, 13, 14, 15, 16, 17, 18]. Considerable attention has been
paid to characterize phase noise in different kinds of lasers [8] and attempts have been made to
reduce phase noise in lasers [19]. The effect of coherence time on nonlinear processes like self-phase
modulation has been studied in [20]. Saleh [21] considered the effect of phase noise on completely
coherent and completely incoherent light when direct-detection receivers are used. Incoherent light
(intensity) gets filtered linearly [9], yet with an impulse response that is magnitude squared of the
impulse response for the coherent light (field). When coherent light is incident on the photo-detector,
the electric current is the sum of the intensity of different pulses taken individually and other cross-
terms due to pulse-to-pulse interactions. The cross-terms introduce a nonlinear interference term
which needs to be included in the error analysis at the receiver.
5

1.3 Optical Fiber
There are three major challenges faced in long-distance optical communication systems: attenuation,
linear dispersion, and fiber nonlinearities. Linear attenuation reduces the power level of the signal
below the thermal noise threshold at the receiver increasing the probability of error. Attenuation
is typically on the order of� � � dB/km, and limits the transmission distance to about
��� �km. Fiber
amplifiers are an attractive means of compensating for attenuation, since they typically have low
noise, high bandwidth, and low cost. Amplifiers gains are in the range of � � dB, so for a transmission
distance of��� ���
km, we require about 10 amplifiers. However, amplified spontaneous emission
(ASE) noise (proportional to the amplifier gain) adds to the amplified signal, which accumulates
with each amplification stage in the link, thereby degrading the signal-to-noise ratio and increasing
the probability of error at the receiver.
Linear dispersion spreads the pulses, while fiber nonlinearities introduce phase effects that accu-
mulate along the fiber due to the increased power levels (due to amplification) and large transmission
distances. Both these phenomena severely affect the performance of the communication system by
introducing inter-symbol interference (ISI) and inter-channel interference (ICI). The typical limits
on transmission distances set by linear dispersion and fiber nonlinearities are � ��� km and� � �
km,
respectively. These two deleterious effects can be reduced by three methods: input pulse shaping
(chirping, phase encoding, polarization scrambling, etc.), dispersion management (using dispersion
compensating fiber), or using fiber gratings.
The optical fiber supports various number of modes of the optical wave. These different modes
travel at different speeds owing to the difference in their path-lengths in the fiber. This gives rise to
what is known as modal dispersion. By adjusting the fiber core radius and core-cladding index differ-
ence, we can allow only one mode to propagate. For high-speed long-haul communication systems,
consideration can be restricted to these single-mode fibers (SMF), and the modal dispersion can
assumed to be zero. There are other random nonlinear problems like polarization mode dispersion
6

(PMD) [22, 23] that affect these long-distance transmission systems. Physically, PMD has its origin
in the birefringence that is present in any optical fiber. While this birefringence is small in absolute
terms in fibers, the corresponding beat length is only about���
m, far smaller than the dispersive or
nonlinear scale lengths which are typically hundreds of kilometers. This large birefringence would
be devastating in communication systems but for the fact that the orientation of the birefringence is
randomly varying on a length scale that is on the order of��� �
m. The rapid variation of the bire-
fringence orientation tends to make the effect of the birefringence average out to zero. The residual
effect leads to pulse spreading, referred to as polarization mode dispersion (PMD). PMD is signif-
icant only in very long-haul systems (lengths �� � � �
km); therefore, we ignore this effect in this
work, since we concentrate on links varying from��� � � � � �
km. The remaining signal degradations
caused by the fiber are attenuation, chromatic (linear) dispersion and deterministic nonlinearities.
1.3.1 Linear Attenuation
Linear attenuation and dispersion are widely studied in fiber-optic systems, as they limit the rate
and reliability of information transfer [21, 24, 25, 26]. Attenuation reduces the power levels, thus
scaling the signal as the exponent of the length of the fiber. Absorption of an optical wave occur
mainly because of material absorption and Rayleigh scattering. Rayleigh scattering is generally
described by the absorption coefficient, which is known to obey the relation � ����� [20], where
��
� ���-� �
dB � m � /km for silica (depending on the constituents of the fiber core) and � is the
optical wavelength. Modern optical systems are expected to operate in the low-loss region of the
spectrum,��� � � � m-
� ��� � � m, where Rayleigh scattering is less than� � � dB/km for silica. Absorption
reduces the intensity of light in the fiber, which in turn reduces the magnitude of fiber nonlinearities
thus limiting the length over which nonlinear interactions are effective. Fiber amplifiers can be
used to restore the signal to its original power levels; however, that increases the effect of fiber
nonlinearities considerably. We introduce optical amplifiers in Section 1.4.
7

1.3.2 Linear (Chromatic) Dispersion
Linear dispersion has been recognized as the primary limiting factor on the maximum data rate for
single-user optical fiber communication systems [24, 25, 26, 27] that use using optical amplifiers to
remove the effects of attenuation. The linear dispersion introduces linear inter-symbol interference
(ISI) in single-user and multi-user systems, and fiber nonlinearities introduce nonlinear ISI and
inter-channel interference (ICI) in multi-user systems.
The second-order dispersion, commonly known as group velocity dispersion (GVD), widens
the pulses, thus introducing inter-symbol interference (ISI). GVD is the primary limiting factor on
the maximum data rate achievable, as it makes the information retrieval at the receiver difficult for
long lengths of fibers. Thus, recent fiber-optic systems operate at the zero-dispersion wavelength � �(��� � � m for silica), at which GVD is zero, thus avoiding its effects. GVD consists of two distinct
components, one due to material dispersion (depends on the material used to fabricate the fiber) and
the other due to waveguide dispersion (depends upon core radius and the core-cladding index differ-
ence). By controlling the waveguide dispersion, ��� can be shifted to the vicinity of��� � � � m where
the fiber loss is minimum, giving us what are commonly known as dispersion-shifted fibers [20].
Using multiple claddings, waveguide dispersion and material dispersion can be carefully controlled
to give dispersion-flattened fibers; these fibers have low dispersion (�
ps/km � nm) over a relatively
large wavelength range��� � � -
����� � � m for use in WDM or CDM application.
For wavelengths � � � � , GVD is positive and the fiber is said to exhibit normal dispersion,
i.e., higher frequency components of an optical pulse travels slower than the lower frequency terms.
For � � ��� , GVD is negative and the fiber is said to exhibit anomalous-dispersion. The residual
dispersion in long haul applications is typically compensated by inserting a fiber having GVD with
an opposite sign that of the original fiber, so that the phase changes induced by the original fiber
are cancelled by the phase changes introduced by the inserted fiber. This methodology is generally
called dispersion mapping.
8

We have to include higher-order dispersion terms for wavelengths closer than a nanometer to � � .The third-order dispersion, which is much smaller than GVD, is the primary concern for the present
fiber-optic links operating at � � . The third-order dispersion introduces an oscillatory structure near
one of the pulse edges (intensity), i.e., the pulse shape is asymmetric [20, 28]. For positive (negative)
third-order dispersion, oscillations appear near the trailing (leading) edge of the pulse. For polariza-
tion maintaining single-mode fibers operating at � � , polarization mode dispersion, modal dispersion,
and group velocity dispersion (GVD) can be ignored; third-order dispersion is the major limitation
on the data rate. Using single pulse propagation results, Marcuse [28] evaluated the effect of input
spectral width (line-width) and the input pulse-width on the output pulse-width (approximating the
output pulse shape with a Gaussian shaped pulse). It has been shown that data rates of � � � Gbps can
be achieved over fiber lengths of � ��� km when limited only by third-order dispersion [20].
Research has been conducted into choosing system parameters like input pulse-width, input
chirp, etc. to minimize output RMS pulse-width [3, 28], inter-symbol interference in the electronic
domain [24], and probability of error in the electronic domain [29, 30]. All these studies model dis-
persion properly but does not take into account the effect of laser phase noise or fiber nonlinearities
on the performance of the communication system.
The electronics and the impulse response of the photo-detector at the receiver limit the data rate
at each link (on each channel in the fiber) to about� �
Gbps (pulse separations of��� �
psec), and
typically� ��� ���
voice channels are multiplexed on such a link. These voice channels are typically
multiplexed in time, i.e., TDM. Such wide pulses do not suffer much from dispersion and together
with the use of fiber amplifiers, allow us to have long spans of the fiber without any significant
dispersion or attenuation. Future systems are expected to use � � -���
psec input pulses, generated
by highly coherent semiconductor lasers for single-user systems and even smaller pulse-widths for
multi-user systems like TDM and CDM. For CDM systems, optical preprocessing is required before
photo-detection to separate the multiple signals so that the total throughput is not limited by the
photo-detector response. Assuming a minimum signature-sequence length of��� �
, pulse-widths of
9

�psec are required to obtain the same data rate in CDM systems as the single-user system; disper-
sion effects are more severe, which combined with fiber nonlinearities make long fibers impractical.
Thus, a realistic study of the effect of linear dispersion and fiber nonlinearities on the system perfor-
mance is required to harness the potential of these high data rate fiber-optic systems.
1.3.3 Fiber Nonlinearities
It is well recognized that fiber nonlinearities limit the performance of current optical communication
systems [20, 31, 32, 33, 34]. Various nonlinear effects such as self-phase modulation (SPM) [35],
cross-phase modulation (CPM), stimulated Raman scattering (SRS), stimulated Brillouin scattering
(SBS), and four-wave mixing (FWM) can cause significant cross-talk in multi-user systems such as
WDM [31, 33] and CDM [34] systems. Nonlinear effects increase with increase in the power level
of the laser and the length of the fiber. In previous single-user optical fiber communication systems
using power levels below�
mW (in a typical single-mode fiber of cross-sectional area��� � m
�, this
power gives an intensity of � � � MW/m�, which increases the refractive index of the fiber core
by �� � ���������
) and link lengths of � � km, fiber nonlinearities did not play a significant role in
degrading the system performance.
Current systems use peak input power levels of less than�
mW over link lengths exceeding� � � �
km. WDM systems using solitons as basic pulse shapes anticipate peak power levels of���
mW
per user at each frequency and CDM systems are expected to transmit � � - � � times that power at a
single carrier frequency. Due to the presence of multiple users in the system, power levels are much
higher in multi-user systems; fiber nonlinearities introduce inter-symbol interference (ISI) and inter-
channel interference (ICI) [36], leading to deterioration in the performance of these systems. The
availability of low attenuation (using fiber amplifiers) and low dispersion fibers makes it possible
to transmit data over long lengths without requiring reconstruction of the signal. These increased
lengths together with higher power levels make the study of fiber nonlinearities useful at this juncture
of time, especially for future WDM and CDM systems [33, 34, 37].
10

Fiber nonlinearities, especially self-phase modulation spreads the spectrum of the signals by
creating new frequencies. The frequency spread of the signal depends on the rate at which the
signal changes; the narrower the pulses, the steeper the edges and the more the time spreading due
to higher-order dispersion and higher-order fiber nonlinearities. Higher-order dispersion and fiber
nonlinearities have to be included in an accurate model when pulse-widths are smaller than� �
psec
in long-distance systems.
Current research in optical communications uses root mean-square (RMS) pulse-width, optical
and electrical signal-to-interference (SIR), power loss and crosstalk from other users (estimated from
single pulse propagation experiments) [31, 33] as measures of degradation. Other effects on pulse-
shape (e.g., spreading and steepening of the pulse) and the resulting effect on the probability of error
of a communication system have not been studied. Due to the high coherence of light from modern
lasers, the nonlinear interaction between pulses is significant. Fiber nonlinearities introduce addi-
tional pulse-to-pulse interactions that are generally ignored in the current design process. Analytical
expressions provide a powerful tool for the study and accurate modeling of these nonlinear (indi-
vidually and cumulatively) effects. In this dissertation, we present a closed-form nonlinear transfer
function that can describe linear dispersion, fiber nonlinearities and the pulse-to-pulse interactions
in single-user and multi-user fiber-optic communication system.
The generalized nonlinear Schroedinger (NLS) wave equation is commonly used to describe the
slowly varying complex envelope of the optical field (valid for pulses with widths as short as � � -
� � fsec) in the fiber. The NLS equation is derived from Maxwell’s equations either completely in the
time-domain [20, 34] or completely in the frequency-domain [38, 39]. NLS equation has also been
derived including the waveguide properties of the fiber [40]. It can explain most of the linear and
nonlinear phenomena in an optical fiber. Previous methods of solving the NLS equation, either in
the time domain or in the frequency domain, have been recursive and numerical. It is not practical
to optimize the system performance using such methods when many variables are considered since
the optimization must be performed numerically. The availability of an analytical model of the NLS
11

equation allows the design of high-performance optical amplifier based long-haul systems, which
requires the minimization of linear dispersion, fiber nonlinearities, and ASE noise from amplifiers
simultaneously.
The NLS equation is generally solved using (recursive) numerical methods such as the Split-step
Fourier (SSF) method, finite-difference methods [20] or the Runge-Kutta method [38]. The split-
step Fourier method divides the fiber into small segments and the output of each segment is found
numerically using the output of the previous segment as the input. Very small segment lengths are
required to get accurate results; therefore, the computational cost becomes prohibitively high for
long lengths of fibers and short pulse-widths, which are important for future systems. If we increase
the segment lengths to reduce these effects, the accuracy in representing the fiber nonlinearities
decreases. Furthermore, the discretization errors can accumulate along the length of the fiber, thus
generating erroneous results.
Taha et. al. [41] have investigated various recursive solutions for the time-domain NLS equation,
and have shown that the SSF method is the most accurate and computationally cheap algorithm
available (when the nonlinear portion of the NLS equation is implemented in the time domain).
Several variations of the SSF method have been proposed recently, one based on an orthonormal
expansion of the output field [42] and another based on a wavelet expansion [43]; however, both
of these methods are still recursive, and may suffer from the same problems as the original SSF
method.
These recursive methods of solving the NLS equation do not give any indication of how to re-
move the nonlinear effects, especially when dealing with communication applications, where a series
of pulses are usually transmitted and nonlinear interaction between the pulses should be considered.
A closed-form analytical description of the linear and nonlinear effects is required to optimize com-
munication system performance. An analytical method based on a Volterra series transfer function
(VSTF) is presented in this dissertation.
12

1.4 Optical Amplifiers
Linear attenuation reduces the signal levels as an exponential function of the length of the fiber.
Previous optical systems had repeaters every���
km, with the optical signals photo-detected, con-
verted to electronic signals, and then converted to optical signals using optoelectronic components.
With the advent of all optical fiber amplifiers, the need for the slow interface between optics and
electronics is bypassed and higher data rates are now possible. The fiber amplifiers have a typical
spacing of about � � -� � � km that restore the signal powers by optical means to the original values.
Using fiber amplifiers, link lengths of the order of��� � �
km are in operation without ever requiring
reconstruction of the signal [27].
The invention of the erbium-doped fiber amplifier (EDFA) paved way for the development of
high bit rate, all-optical ultra long-distance communication systems [27, 44, 45, 46]. There are
three major types of optical amplifiers available for use in optical communication systems: fiber
amplifiers (mostly erbium doped, EDFA), semiconductor optical amplifiers (SOA) [47], and Raman
amplifiers. Raman amplifiers require pump powers of the order of� � �
-�
W which can not be obtained
from current semiconductor lasers and therefore these are not used. SOAs are polarization sensitive,
suffer more coupling losses, and introduce more inter-channel interference than the fiber amplifiers.
Fiber amplifiers have low insertion loss, high gain, large bandwidth, low noise, and low crosstalk;
therefore, they are most commonly used for long-haul applications. We consider only the fiber
amplifiers in this work.
Although fiber amplifiers provide a good means of compensating for attenuation, they add con-
siderable amount of ASE noise, that accumulates as the number of amplifiers increases. The ASE
noise together with the interaction of linear dispersion and fiber nonlinearities (modulation instabil-
ity) gets amplified thus affecting the receiver statistics. So while reducing the problems introduced
by linear attenuation, optical amplifiers introduce (of course less significant) ASE noise problems.
Fiber amplifiers use the energy provided by the laser pump to amplify the optical signals pro-
13

portional to the pump power and length of the doped fiber used in the amplifier. Power conversion
is most efficient for EDFAs when the pump wavelength is close to � �
nm, although recently pro-
posed distributed amplifiers use pump wavelength of� � � � nm to keep the pump power loss due to
fiber attenuation to a minimum. Amplification efficiencies of� ���
dB/mW of pump power have been
achieved at a pump of power of about���
mW. The pump power is fed to the amplifiers either in
the same direction as the signal (forward-pumping), or opposite direction to the signal (backward-
pumping), when higher gains are desired, pump power is fed from both directions using two pump
lasers. This has created considerable interest in bi-directional systems, where the huge bandwidth
of the fiber can exploited to a fuller extent. The intrinsic gain spectrum (the wavelength range
over which the signal experiences significant gain) of pure silica is about���
nm (full-width at half
maximum, FWHM). The gain of alumino-silicate glasses with homogeneous and inhomogeneous
broadening increases the amplifier bandwidth to about � � nm [20].
After the pump and signal are coupled into the erbium doped fiber, there is power conversion
from pump to signal. The electrons in the doped fiber transition to a higher energy level after stim-
ulated absorption of pump energy, which return to their original energy states by either stimulated
emission or spontaneous emission. Stimulated emission due to the signal power provides the basic
amplification mechanism in the EDFA. The spontaneous emission causes the electrons to return to
the ground state randomly, thereby adding (incoherent) spontaneous noise to the amplified signal,
which gets amplified further by the amplifier gain mechanism, producing what is called amplified
spontaneous emission (ASE) noise. Therefore, both the noise power and the amplifier gain are pro-
portional to the pump power and doped fiber length, i.e., the larger the gain, the more noise power
is added to the amplified signal. Optimum pump powers and doped fiber lengths can be found to
improve the performance, which is quantified by the noise figure that is defined as the the ratio of
the signal-to-noise ratios before and after the amplifier. Typical noise figures are on the order of�
dB, and typical doped fiber lengths are���
m. For input power levels below � �dBm, the amplifier
acts like a linear amplifier; however, for higher signal powers the excited carrier concentration de-
14

creases, deteriorating the gain mechanism, thereby reducing the gain. The fiber amplifier is said to
be in saturation and acts like a nonlinear device for higher signal powers.
1.5 Optical Receiver
The photo-detector is a square-law device that detects the magnitude-squared of the real envelope
of the optical field. The photo-detector produces a number of electrons following a Poisson process
with rate proportional to the intensity of the incident optical field. These electrons thus generate
an electric current proportional to the number of photons incident on the photo-detector. In a more
accurate model the impulse response of the photo-detector (due to diode capacitance and carrier
transit times) can also be included in the Poisson model, giving what is known as a filtered Poisson
model [48]. The current from ASE noise component and the beat terms between the signal and
the ASE noise add to the electronic/thermal noise from the electronic circuitry, increasing the noise
content of the output current from the photo-detector.
There are two methods of extracting the information bearing signal from the received optical
field, coherent detection and direct-detection. Coherent detection involves translating the incoming
optical wave to an intermediate frequency (IF) by mixing with an optical wave from a local oscil-
lator. The local oscillator output field is added to the incoming signal and then the photo-detector
detects the magnitude-squared of the real envelope of the sum signal and then low-pass filters it, thus
providing a scaled version of the incoming optical field at the IF (i.e., phase information is retained).
Due to the availability of highly coherent short pulse-width sources, considerable attention is being
paid to the possibility of coherent receivers [11, 12, 49]. For multi-user systems (called optical fre-
quency division multiplexed (OFDM) or dense WDM) with coherent receivers, the channel spacing
can be small of the order of��� �
GHz, as isolating the channels at the receiver is relatively simple
using a local oscillator. However, the transmitting lasers and local oscillator are required to have
a wavelength stability of the order of� � � � � �
nm, which although has been achieved in commercial
15

systems, is still not very popular. Systems using coherent detection are likely to be more sensitive
to the effects of fiber nonlinearities and laser phase noise than the present direct-detection systems.
This has created considerable interest in finding ways of reducing the line-width of lasers [19].
Modern lasers generate highly coherent light (i.e., very little phase noise), thus reducing the effect
of phase noise on the received signal. Although coherent systems offer many interesting challenges
in the area of nonlinear modeling and system design, we have focused our work on direct detection.
Direct-detection uses the intensity of the real envelope of the incoming signal to make decisions
about the transmitted bits, i.e., the phase information in the optical field is not utilized. Direct-
detection receivers are very popular because of their low cost and their insensitivity to the state of
polarization of the received signal. Since the intensity of the information bearing signal only can
be observed and the phase is lost at the detector, it is generally assumed that the phase noise does
not affect the performance of a communication system using direct-detection [3, 24, 25, 29, 30].
We show that phase noise does affect the performance of a direct-detection receiver. For multi-user
systems using direct-detection systems (called WDM systems), the channel spacing is required to
be larger than � � � GHz, so large bandwidth optical amplifiers are required.
1.6 System Analysis and Design
Several phenomena limit the transmission performance of long-haul optical transmission systems in-
cluding noise, dispersion and nonlinearities [50]. There are various methods of reducing the effects
of these fiber imperfections. Given the statistical properties of the input signals and the channel
description, an optimal receiver can be designed to minimize the deleterious effects of the fiber;
however, such a method is not popular or practical for optical communication systems due to lim-
ited optical processing capabilities. Unlike the wireless or satellite communication channels, the
fiber-optic communication channel itself can be tailored to provide the required performance; the
fiber parameters can be determined that provide the optimal performance (of course, within few
16

practical limitations). Therefore, the problem reduces to either choosing the input parameters to
suit a given channel or choose the channel to suit given input parameters. In this work, we design
the system by either choosing the input peak power and input pulse-width to maximize the optical
signal-to-interference ratio (SIR) at the receiver or choosing the channel parameters for a given in-
put parameters to minimize the probability of error. We do not consider the optimization of receiver
processing and leave that for future work.
In the initial long-haul systems using optical amplifiers, it was believed that if we maintain the
total losses to be zero and use dispersion shifted fiber (DSF), we can achieve the best performance.
However, when the system is operated at the fiber’s zero dispersion wavelength, the signals and the
amplifier noise (with the wavelengths close to the signal) travel at same velocities. Under these con-
ditions, the signal and the noise waves have long interaction lengths and can mix together. Linear
dispersion causes different wavelengths to travel at different group velocities in the SMF. Linear dis-
persion thus reduces phase matching, or the propagation distance over which closely spaced wave-
lengths interact. Therefore, we can use dispersion parameters intelligently to reduce the amount of
nonlinear interaction in the fiber. Thus, in systems operating over long distances, the nonlinear in-
teraction can be reduced by tailoring the accumulated dispersion so that the phase-matching lengths
are short, and the end-to-end dispersion is small. This technique of dispersion mapping has been
used in both single channel as well as WDM systems to reduce the nonlinear interaction between
signal and noise and different frequencies in WDM systems. Current WDM systems use non dis-
persion shifted fiber (NDSF) for most of the length, and rely on using short lengths of dispersion
compensating fiber (DCF) to get the total dispersion in the link close to zero. In the equi-modular
dispersion compensation scheme, there is a segment each of NDSF and DCF between the pairs of
amplifiers, thus keeping the total dispersion of each fiber segment between the amplifiers close to
zero.
When dispersion compensating fiber segments with negative dispersion are used in the optical
link, the interaction between dispersion and fiber nonlinearities introduces modulation instability
17

(MI), which is a parametric gain process. This parametric process amplifies the ASE noise over a
major portion of the spectrum, increasing the already accumulated noise at the receiver. Therefore,
the choice of dispersion parameters play a significant role in determining the performance of an
optical communication system. Even though there has been increasing interest in developing better
dispersion management schemes that minimize modulation instability [51, 52], the optimal disper-
sion management scheme has not been found, and there are no measures of optimality available.
Analytical results for describing MI are available only for a single fiber segment [20], and the effect
of having fiber amplifiers on modulation instability is not clear. Volterra series model includes the
effect of fiber amplifier parameters on modulation instability and the effects of modulation instabil-
ity on ASE noise, with statistical description of the output current at the receiver. This is an example
of a situation where the analysis is not possible with the SSF method due to lack of analytical ex-
pressions for the output field including all these effects; the VSTF method can excel as an excellent
design tool in this case.
For systems that have already been installed, fiber gratings are a very efficient means of com-
pensating for dispersion [53]. They are compact, passive and relatively simple to fabricate. With
the commercially available���
cm long phase masks, the bandwidth over which these gratings can
compensate for dispersion is increasing rapidly. Although it is possible to model and design the
optimal fiber gratings using the VSTF approach, we do not investigate this topic in this dissertation.
The most logical performance measure in the design of digital optical communication systems
is the probability of error. Unfortunately, analytical expressions for the probability of error are in-
tractable. Most of the performance evaluation methods in optical communication systems rely on
simulations, eye-diagrams and receiver�
. A majority of researchers rely on the receiver�
(of-
ten determined from eye-diagrams), which is proportional to the signal-to-noise ratio of the photo-
detector output current when a Gaussian distribution is used for the Poisson counting process (using
the central-limit theorem), i.e., it depends only upon the first two moments of output current of the
photo-detector. The probability of error predicted using receiver�
is very conservative [54], and
18

for the low probability of errors encountered in optical communication systems, we require tighter
bounds such as Chernoff bounds, saddle-point approximation, or approximations based on the the-
ory of large deviations [55].
The common performance measures used in other communication areas like error bounds on
the probability of error (e.g., Chernoff bounds) are often not employed in analyzing amplifier based
optical communication systems. The design of current amplifier based optical fiber systems thus is
empirical, based on simplified models, and systems parameters are varied in a heuristic fashion to get
the best performance from the system [51, 52, 56]. To design better systems, analytical methods for
studying the combined effects of dispersion, fiber nonlinearities, MI, ASE noise, and the detector
(square-law) nonlinearities are required. Ribeiro et. al. [54] have advocated the use of tighter
bounds on the probability of error. The moment generating function (MGF) for the output current
was derived and used to evaluate the performance of EDFA pre-amplified receiver. The effect of
thermal noise, photo-detector response, inter-symbol interference was included in the description of
the MCB. Their model makes some unwarranted use of the central limit theorem and assumes an
infinite optical bandwidth, which is not very practical. In this work, we derive a more accurate MGF
for the output current at the photo-detector, including the spectral distribution of the ASE noise,
which provides a more realistic bound on the probability of error.
To design better systems, we require analytical expressions for the performance criterion in
terms of the important system parameters. We derive such analytical expressions for the Chernoff
bound on the probability of error in terms of laser, fiber and amplifier parameters, including the
detector characteristics more realistically than those available in the literature. In this study, we lay
a foundation for further analysis of these effects on present and future fiber-optic communication
systems.
19

1.7 Dissertation Organization
Chapter 2 elaborates on various linear and nonlinear effects in a fiber, laser and photo-detector,
introducing mathematical notation to be used throughout this study. Two forms of the NLS equation
are presented, one derived from Maxwell’s equations in the time-domain and the other derived in
the frequency-domain.
Chapter 3 describes a general method of deriving a Volterra series transfer function (VSTF) to
model a single-mode fiber (SMF). We concentrate on showing the accuracy, advantages and limi-
tations of using the Volterra series model. A third- or fifth-order approximation to such a VSTF is
shown to provide an excellent match to the recursive methods such as the SSF method. Analysis of
the interference caused by a pump pulse (present at another frequency) on the signal pulse is given to
show the effectiveness of the VSTF method in modeling fiber nonlinearities in multi-frequency sys-
tems. We study the effectiveness of a nonlinear equalizer in restoring the original pulse shape. The
effect of fiber nonlinearities on the shape of a single pulse is studied, providing a way of choosing
the optimal input parameters (pulse-width and peak pulse power) required to get minimum output
RMS pulse-width. The effect of linear dispersion and fiber nonlinearities on the optical signal-to-
interference ratio (SIR) at the detector is presented, providing estimates of the input parameters
required to optimize the system performance.
We use the linear portion of the Volterra series model to study the effect of phase noise on
linear dispersion in direct-detection systems in Chapter 4. We derive the first two moments of the
intensity at the input of the photo-detector, and show that the moments for completely coherent
and completely incoherent light are special cases of those derived by Saleh [21]. We study the
effect of phase noise and dispersion on the pulse shapes and the determine the output RMS pulse-
width; we find optimal source parameters taking coherence time into account. We show that as the
source becomes more and more coherent to make pulse-widths smaller, dispersion effects (because
of decreased pulse-widths) and nonlinear interference or nonlinear noise due to the photo-detector
20

increases.
Using the overall nonlinear VSTF developed in Chapter 3, we derive an analytical expression
for the output field of the overall system in terms of transmitter, fiber and amplifier parameters. A
modified Chernoff bound (MCB) on the probability of error at the receiver is derived and used to
design a simple optical communication systems. As a part of the derivation, the moment generating
function (MGF) of the decision variable for an integrate-and-threshold detector is derived including
the effects of linear dispersion, fiber nonlinearities, and ASE noise from the optical amplifiers. To
show the power of the approach, optimal dispersion parameters were determined while varying the
power distribution along the fiber by varying the input peak power levels and the amplifier gains.
Four different possible amplifier chains are studied and it is shown that the configuration of the
amplifier chain is very important in determining the performance of the optical communication sys-
tems. We compare the performance of optimal dispersion parameters with equi-modular dispersion
compensating fiber to check in what conditions the approximations made in this work are valid, and
when more accurate analysis is required to get optimal dispersion parameters.
In Chapter 6, we conclude the dissertation with a few suggestions for other future work using
the analytical expressions provided by Volterra series model. An appendix is included to illustrate
the most important potential application of the VSTF method, namely, multi-user communication
systems, especially wavelength division multiplexed (WDM) systems. We show that VSTF can be
used to obtain more accurate expressions for how signals at different frequencies interact with each
other and how it can be used to design such complex systems.
21

Chapter 2
Signal Degradations within Fiber-opticSystems
This chapter introduces mathematical details of optical fiber communication systems, concentrating
on phase noise in lasers, the nonlinear Schroedinger (NLS) wave equation (derived from Maxwell’s
equations) to describe the behavior of the fiber and optical amplifiers, and the receiver statistics at
the photo-detector. We model the behavior of the system with phase noise and timing jitter at the
laser source, and linear dispersion and nonlinearities in the fiber, the gain and noise introduced by the
optical amplifier, and the square-law (nonlinear) nature of the photo-detector and shot and thermal
noise with photo-detection process.
2.1 Degradations Caused by Laser Source Imperfections
For intensity-modulated binary communication systems, the complex envelope of the optical field
(assuming monochromatic light) �� ��� � � from a laser ( � ��) can be written as
� ��� � � ���� ����� ��� $�� � �
��� �� & ��� ��� ��� � � ��� � ����� ������ $�� $! � �#"%$&� � ��� $�� (2.1)
where ' & ��( ��� �� are the information bits, which can take values in ' � � � ( , ) ��� is the phase noise,
��� is the symbol period, � is the peak power of the input pulse, and � ��� is the pulse shape. The
pulse generation timing jitter, ��� , for our purposes manifests itself as a random phase � ���* �+� �,��� $!
that is constant for each pulse. Since the carrier frequency - is generally very large, the phase
22

term )'� � - �� � can be modeled as independent from pulse to pulse and as uniformly distributed
in� ��� ����� . We can assume that ) ��� and ' ) � ( ��� �� are statistically independent. Without loss of
generality, external modulation can be assumed to be used to keep the mathematics simple. We
introduce the random signal �� ��� so that we can study the effect of phase noise ) ��� only assuming
� ��� is given, i.e., timing jitter information and data bits are given; we then consider the effect
of phase noise and timing jitter together, where �� ��� becomes random because of the timing jitter
' )��( ��� �� and unknown information bits ' & � ( ��� �� .
In digital communication systems using pulsed transmission, the wavelength of the carrier varies
across the pulse; there is a shift to the low frequencies on the leading edge of the pulse and a shift to
the higher frequencies on the trailing edge. This type of effect if usually called (linear) chirp. Typi-
cally, coupled with dispersion of a SMF, the chirp causes pulse broadening for wavelengths shorter
than the zero dispersion wavelength (ZDW) and for wavelengths longer than ZDW, it provides pulse
compression (used to compensate for dispersion). Chirp can also be accounted for by finding the
full-width at half-maximum (FWHM) line-width enhancement caused by chirp. Although it is pos-
sible to easily include chirp, we don’t do so in this work.
We can describe phase noise ) ��� as a Wiener-Levy process
) ��� � ���� $�
� ��� �� (2.2)
where � ��� is a zero-mean Gaussian white noise process with spectral density � � . The first two
moments of ) ��� can be easily seen as � � ) ����� � �and � � ) � ����� � ����� ��� , with ) � � � �
. � � is
equal to the laser line-width or the Lorentzian bandwidth. Phase noise can also be quantified by the
coherence time, defined as �� � �������� .
Light from a laser is generally coherent only over a short period of time because of this phase
noise. The coherence of the source can be described by considering the autocorrelation properties
of� ��� � � ,
� � � ��� � � ��� � �� � � ��� ���� � ���! #"$� ���� ����� ������ � � � � � $�� � � $ �&% � � � � �� ����� ���� ��� �&��� �(' % ' (2.3)
23

Depending on the coherence time and the observation interval (interval over which intensity of
light is integrated to make the decisions about bits received, which is generally the symbol period),
the transmitted light can be assumed to follow one of three models.
Completely coherent light : The coherence time of the light is much larger than the observation
interval, which requires a highly coherent laser source like a mode-locked laser. When light
is completely coherent, there is no phase noise, i.e., � � ��, and � �
��� ����� � � " , and
� � � ��� � � � � ��� � � ��� � � ���� � ��� � . Recently, research is being conducted into developing
lasers that can generate highly coherent light in very short bursts, so that these lasers can be used
to send information bits at very high data rates. Mode-locked lasers can generate pulse-widths as
small as� � � �
psec and as large as��� �
psec. The coherence time can be as high as � � � sec [8, 57],
thus having more than� � � � pulses within the coherence time.
Partially coherent light : The coherence time of light and the observation interval are comparable,
which is a more practical assumption for modern systems. Commercial semiconductor laser diodes
(LD) can generate pulses as small as���
psec, with coherence times of about�
psec (thus, the light is
almost incoherent). Distributed feedback (DFB) lasers can provide pulse-widths as small as � � psec
with an increase in coherence times to� �
psec [26], giving us partially coherent light.
Completely incoherent light : The coherence time is much smaller than the observation interval (bit
duration), which is true for LEDs and semiconductor laser diodes. For completely incoherent light,
� � � " and �! � �, giving � � � ��� � � � � � � � � ��� � � �� ��� � � � �� . LEDs generate true incoherent
light, with pulse-widths of about � nsec [26].
Most of the ultra-short pulse sources considered for future fiber-optic communication systems
are mode-locked lasers [20, 26]. The power spectrum of a mode-locked laser consists of � equally
spaced longitudinal modes which are locked in phase [8, 57]. The modes are only locked in phase
relative to each other; they can still share a common random phase (phase noise) which determines
the width of each mode. The mode spacing, ��� � , determines the repetition rate, � � �������� , of
the pulse train. The total bandwidth, � - , that is locked determines the pulse-width, � ��� � ,
24

whereas the full-width at half maximum line-width of the individual modes of the mode-locked
power spectrum, � ��� , determines the coherence time of the pulse train, � � ���� �� . For a typical
mode-locked laser [8, 57], �� �� � � sec and � � � � � � psec giving us approximately 1300 pulses
within the coherence time. The RMS value of the timing jitter for these lasers is on the order of�
psec, and RMS amplitude jitter of ��
. Colliding-pulse mode-locked ring dye lasers [19] can
generate pulses as short as� �
fsec with a repetition time of���
nsec with a power of � W.
To achieve light amplification in a laser, the amplifier gain must be high and in this high gain
region, the laser behaves in a nonlinear fashion [4, 5]; the output optical field is a nonlinear function
of the input electric current. Such laser nonlinearities are generally ignored in the analysis of com-
munication systems. Laser nonlinearities can be easily included in the Volterra series model to be
presented in Chapter 3. The only degradations due to the laser source considered in this study are
phase noise, timing jitter, and chirp.
2.2 Degradations Caused by the Optical Fiber
The polarization induced in an optical fiber is dependent upon the intensity of the light passing
through it. At low intensities, the polarization is a linear function of the applied field; however,
at high intensities this simple description is no longer valid. Polarization at a distance � from the
transmitter and time � , �� ��� � � , induced in an optical fiber by the field �� ��� � � (with a complex
envelope� ��� � � ) with a central frequency of - � , is given by [20]
�� ��� � � ��������� � � � �� �� � � � �� �� �� � � � �� �� �� � � � �� �(2.4)
� �� is a tensor of rank � � �that describes the first order susceptibility function of the material used
in the fiber, � � is the vacuum permittivity, and�
�� denotes a tensor product between�
and .
The linear susceptibility tensor � - � � � � � - � represents the dominant contribution to
�� ��� � � � ���� ��� � ��� �� � � ��� � � , which is the linear polarization ���� ��� � � (ignoring waveguide prop-
25

erties of the fiber) given by
�� � ��� � � � ��� � �� � - � �� - � � ��� � �,� $ � - � (2.5)
The nonlinear polarization �� � � ��� � � is mainly due to the third-order susceptibility, � � � - � ��- � ��- � �[20, 34], i.e.,
�� � � ��� � � � ��� � � � � � � - � ��- � ��- � � �� - � � � � �� - � � � � �� - � � � ��� � � � � �����&�����,� $ � - � � - � � - � � (2.6)
We can show that �� � � ��� � � consists of a signal at - � and another term at � - � . The latter term is
generally ignored in optical fiber communications as it lies outside the frequencies of interest.
� � � is responsible for second-harmonic generation and sum-frequency generation. � � � is zero
for � ��� � since the silica molecule is symmetric. However, dopants inside the fiber core can con-
tribute to � � � under certain conditions.
The analysis of the effects of fiber nonlinearities in multiuser systems requires knowledge of the
dispersion (frequency-dependence) of the third-order susceptibility. Unfortunately, the dispersion
(frequency-dependence) of the third-order susceptibility in silica fibers is generally not known [20,
58, 59]; therefore, the third-order susceptibility is expanded in a Taylor series, and the coefficients in
the Taylor series are calculated from experimental results. Depending on the bandwidth of interest,
the higher-order terms in the Taylor expansion are ignored, and the analysis is performed with a few
of the coefficients. Whatever information various experimentally observable nonlinear effects do not
provide is lost in the process. If we expand both the linear polarization and nonlinear polarization
in a Taylor series, we obtain what is commonly known as the generalized nonlinear Schroedinger
(NLS) wave equation.
2.2.1 Nonlinear Schroedinger Wave Equation
The propagation of light in a guided medium is generally described by Maxwell’s equations. For
long lengths of fiber, the Nonlinear Schroedinger (NLS) wave equation is typically derived under a
few approximations on the waveguide properties of the guiding medium:
26

1. Slowly-varying complex envelope approximation, which means that the variation of the com-
plex envelope� ��� � � is sufficiently slow with distance � and time � , respectively:����� � � � ��� � ��
��
����� � ����� � � � � ��� � ���
����� (2.7)����� � � � ��� � �� � � ����� � ����� - � � � ��� � �� � ����� (2.8)
where� � � � - ��� � � � � � , where � � is the linear refractive index of the fiber. This approxi-
mation is valid for pulses with widths as small as � � - � � fsec.
2. Plane-wave approximation, where the propagation constant is assumed to be given by� - � � - � � - � � � � � - � - � � � � � �
� - � - ��� � � � � �
� - � - ��� � � � � � � �(2.9)
The first-order dispersion parameter is described by�� � � Re
� �
������� � ���� � � � - ��� ��- �
� � - � �� - ��� � (2.10)
where ����� is the effective refractive index of the fiber, and� ��� is the effective cross-sectional
area of the fiber at the frequency/wavelength of operation. The second-order dispersion (GVD)
parameter is described by�� � � Re
� �
�������� � ����� - � � � � - ���� - � � �
� � - � �� - ��� �(2.11)
The third-order dispersion parameter is given by�� � � Re
� - �������� � ���� � �� �
� � � - ���� - � ��
��- �� � � - ���� - � �
�
� - ��� � - � �� - ��� �
(2.12)
3. The fiber acts as a single-mode fiber for the largest wavelength expected to be transmitted over
the fiber.
The NLS equation for monochromatic light in single-mode fibers can be derived completely in the
time-domain as [20, 34]� ���� � ���
�� � �
�� �� � � �
��
�
� � �� � � ����� � �� � � � ��� � � � � � � ��� � � (� � � � � �� � ��� � � �� � � � � �
��� � � � � � �� � � � � ��� � � �� � � � � � � � � � � � � � � � � � � � (2.13)
27

where��� ��� � � is the slowly varying complex envelope of the optical field at time � and distance
� from the transmitter. The linear attenuation coefficient of the fiber as a function of frequency is
given by � - � � Im � � ��������������� � � � - � with � � � � - ��� . The Kerr coefficient is given by� � � - �� � ��� � � � - �������� � � ��� � � � � � - ���- �'��- ��� � � � � - ��'� - �'��- � � � � � � - � ��- ���'� - � � (2.14)
where � � is the effective nonlinear refractive index that describes the self-phase modulation (SPM)
in single-user systems and SPM, cross-phase modulation (CPM), and four-wave mixing (FWM) in
multi-user (WDM) systems.
The second nonlinear coefficient � � � �� � � � describes the self-steepening of pulses in the fiber.
The third and fourth nonlinear coefficients� � � - �������� � ��� � �� - � � �� - � � �� - � � � � � � � - � ��- � ��- � � � � � � - � �'� - � ��- � ��� � � � - � ��- � �'� - � �
����� � ��� � ��� � � �(2.15)
and� � � - �������� � ��� � � � � � � - � ��- � ��- � �� - � �
� � � � - � �'� - � ��- � �� - � �� � � � - � ��- � �'� - � �� - � � ����� � ��� � ��� � � �
(2.16)
explain the self-frequency shift and stimulated Raman scattering (SRS). The nonlinear constants � �and � � are real quantities, whereas � � and � � are complex. The imaginary part of � � � is negligible
for most practical fibers so the losses introduced by the third-order susceptibility (real parts of � � and� � ) are negligible. The Raman coefficient is� �
�� � ��������� � , where � � is the Raman gain coefficient
factor [38], and � � ��� is the inverse-Fourier transform of the Raman gain spectrum, � � - � .Pask and Vaterescu [39] and Francois [38] have proposed to solve Maxwell’s equations com-
pletely in the frequency-domain under a weakly guiding fiber approximation. Considering the
macroscopic fiber nonlinearities like the Kerr effects (SPM, CPM, FWM, and self-steepening) and
Raman effect (self-frequency shift), the following form of the NLS equation is obtained� � - � � ���
� � � - � � - � � � � � � - � � - � � �
28

� � � � -- � � � � � � � - � � � � � � - � � � � � - � - � � - � � � � � - � � - �
� � � � -- � �
��� � � � � - � � - � � � - � � � � � � - � � � � � - � - � � - � � � � � - � � - � (2.17)
where� - � � � is the Fourier transform of the complex envelope
� ��� � � . The linear dispersion is
described by � - � ��� � � � � � � � � � ������ . The shock-term due to � � in (2.13) is taken into account
through � � � - � . The higher-order nonlinear effects due to � � and � � in (2.13) are absorbed into the
more accurate model given by � � - � .Since the frequency-domain approach does not assume monochromatic light, the following are
the advantages of this particular approach [38]:
1. Higher-order linear dispersion and higher-order fiber nonlinearities are difficult to handle with
time-domain techniques because of time-derivatives, which get transformed into multiplica-
tions in the frequency-domain. Proper analysis of these effects for ultra-short pulses being
considered for future high-speed, high-capacity fiber-optic communication systems is better
accomplished in the frequency-domain.
2. Raman gain curves are obtained experimentally in the frequency-domain, which makes the
frequency-domain the natural domain for treating such nonlinear effects. Ultra-short pulse
measurements in applied physical research are also made in the frequency-domain. Therefore,
most of the results available in the literature are available in the frequency domain.
3. Modal distribution of light from the laser is available only in the frequency-domain, making
frequency-domain methods advantageous for such studies.
4. For WDM applications, different users are assumed to be transmitting around distinct frequen-
cies with non-overlapping spectra in the time-domain NLS equation. This is not necessarily
accurate in most systems. The frequency domain method does not impose this constraint.
The Volterra series approach can be used to evaluate the system performance with both the time
domain and frequency domain NLS equations.
29

2.2.2 Linear Dispersion
Due to the frequency dependence of the refractive index � - � , components with different frequen-
cies travel with different speeds, giving rise to what is known as chromatic dispersion. Chromatic
dispersion is related to the characteristic resonance frequencies at which the medium absorbs the
electro-magnetic radiation through oscillations of bound electrons [20].
The first-order dispersion�� , called the propagation constant does not affect the performance
of the receiver for single-frequency operation except for delaying the reception of the signal by an
easily predictable amount, thus we ignore its effect on single-user communication systems. How-
ever, for WDM systems, the delay experienced by different users is different; therefore, each pulse
“walks through” thousands of pulses from other users while in transmission, and nonlinear interac-
tion between those pulses could be quite significant.
Higher-order dispersion causes pulses to broaden, thereby introducing inter-symbol interference,
which makes it difficult for the receiver to decode the information. In practice, only the second and
third-order dispersion terms�� � � � �
��� �� , and�� , respectively, contribute to pulse broadening,
where � is the usual ”dispersion” used in current optical communication literature.
From (2.13), ignoring fiber nonlinearities and ignoring dispersion terms of order higher than � ,
yields � � ��� � ���
� � ����� ��� � � � �
�� � ��� � �� � � � � � � � � ��� � �� � � � �
�� � � ��� � �� � � (2.18)
where� ��� � � again is the complex envelope of the optical field at times � and at a distance � in the
fiber. The linear transfer function describing the dispersion of the complex envelope of the field in a
fiber of length � can be written as [20]
�� - � � � � � ��� �� � ��� � � � ��� � � � � ��� � � � �� (2.19)
30

2.2.3 Nonlinear Phenomenon
Now we introduce some quantitative measures for the Kerr effects and linear dispersion, and their
relation to the length of the fiber in single pulse propagation. Ignoring the higher-order derivatives
from the nonlinear portion, ignoring linear dispersion terms of order higher than 3 in (2.13), and
writing the complex envelope of the optical field� ��� � � for single pulse propagation,
� ��� � � �
� � � ����� ��� ��� ��� � � yields [20]� ���� � � ��� �
�� �
���
� � �� � � ���
����
� � �� � � � ������ �� � � � � � � � (2.20)
where� ��� � � is the pulse shape at a distance � from the transmitter at time � , the dispersion length
� �" �' � � ' , the third-order dispersion length � � �
" �' � � ' , the nonlinear length � � � ��
���� , and
�$ � �������" , where � is the pulse-width, � is the peak pulse power, and ��� � �� � denotes sign of
� . Therefore, if the length of the fiber ��
� � � and ��
� , neither linear dispersion nor fiber
nonlinearities play a significant role during pulse propagation. For ��� � � � and ��� � , both
linear dispersion and fiber nonlinearities play a significant role and the NLS equation has to be
solved completely. In the other two cases, one of the effects can be ignored and the equation can be
solved for the dominant effect. A pulse-width of � ���� �
psec and peak power of � � � mW yield
� � � � � �� � �
km. In order to ignore fiber nonlinearities, we require
�� � � �
� � � �� � � � � �(2.21)
At � ���� � � � m, this requires � � � mW for
��� �psec pulses for typical values of
�� �
� � � psec�/km, and � � � �
/W-km.
Now we explain various Kerr and Raman effects in a fiber. Self-phase modulation (SPM) is an
optical Kerr effect that refers to the self-induced phase shift experienced by an optical field during
its propagation in the fiber. This phase shift is proportional to the intensity of the field, producing
a chirp in the optical field. New frequency components are continuously generated (proportional
to the time-derivative of the intensity of the signal) and as the pulse propagates along the fiber, the
31

spectrum is broadened over its initial spectral width. SPM is useful in pulse-compression, non-
linear optical switching and additive-pulse mode-locking. Higher-order Kerr effects give rise to
self-steepening at the pulse edge proportional to the first derivative of the slowly varying part of
the nonlinear polarization; self-steepening leads to asymmetry in the SPM broadened spectra and
eventually creates an optical shock on the leading edge of the wave.
Neglecting all linear dispersion terms and all fiber nonlinearities except ��� in (2.13) yields� � ��� � ���
� ��� � � � ��� � � � � � ��� � � (2.22)
which yields the output optical field as
� ��� � � � � ��� � ��� � � ' � $ � �,� ' � � (2.23)
where � is the fiber length.
It is interesting to note that we can take advantage of SPM to reduce the GVD induced effects in
the form of solitons. Solitons are waves that propagate undistorted over long distances and remain
unaffected after collision with each other. The phase change introduced by SPM can be cancelled
by the phase change introduced by group velocity dispersion (GVD) for a specific length of the
fiber. By carefully choosing the input pulse parameters and the fiber parameters, nonlinear SPM
induced changes and GVD induced changes (in the anomalous dispersion regime) can be canceled,
making soliton communication systems possible. However, such a cancellation is possible at a
single frequency, and due to the interplay of linear dispersion and fiber nonlinearities, there is a
parametric gain process set up, which for the anomalous dispersion regime produces what is known
as modulation instability. For the NLS equations in (2.13), (2.17), or (2.20) there are variety of
waves which can be called solitons. Solitons for a given fiber are parameterized by the order of the
soliton �� ��� � � �
�� � � � ��� �
� (2.24)
32

where the power � � required to launch the � th-order soliton is defined by
� ��
�� � � �
� � � � � �� � � � (2.25)
The power required to maintain the fundamental (first-order) soliton � �� � is then
� � � � � � � � �� ��� � �� � � �� � � � (2.26)
The length at which the phase change due to SPM cancels the phase change due to GVD is called
the fundamental soliton period � � ; � � increases with the order of the soliton. Thus longer lengths
require higher order solitons to reduce the energy loss in dispersive waves at each recombination in
the soliton propagation. A typical dispersion-shifted fiber in the anomalous dispersion regime with�� � � � psec
�/km and a pulse-width of � �
� �psec requires � � � ���
mW, which can be generated
by a semiconductor laser. Therefore, when the pulse-width is reduced to increase the data rate, the
peak pulse power has to be increased automatically to keep the pulse energy constant for the soliton.
Cross-phase modulation (CPM) is another optical Kerr effect [20] that results in the phase change
of an optical field proportional to the intensity of another signal at a different frequency. CPM also
generates new frequency components, but proportional to the intensity of the signal at a different
frequency. The nonlinear phase-shift for the field at - � due to the fields at -�� and - � � � is given by
) � �� � � � - � �� � � -�� � � � � -�� � �� � ��� ��� � -�� � � � � � � � � - � � � � � � � � � � � � � � � (2.27)
where � � -�� � is the change in the effective refractive index due to the signals at other frequencies.
The first term of this equation describes the SPM and the second part describes the CPM.
When the light propagating along the fiber is coherent, the phases of signals at three different
wavelengths might match producing a new frequency. This phenomenon is termed as four-wave
mixing (FWM) [20, 60, 61, 62, 63]. In quantum-mechanical terms, FWM occurs when the photon
from one or more waves are annihilated and new photons are created at different frequency such that
the net energy and momentum are conserved during the parametric interaction. SMF typically has
33

very low conversion efficiencies due to large dispersion, which disallows any phase matching. Use
of DSF or DCF in the link facilitates phase matching producing inter-modulation terms [61, 62, 63].
Unequally spaced wavelengths are used in WDM systems [64] so that these inter-modulation terms
do not interfere with the signals at other wavelengths (from other users).
In multi-channel systems, three optical frequencies� � , � � , and
� � mix to generate a fourth with
frequency���
�� � � � � � � � . If we assume that the input signals are not depleted by the generation
of mixing products, the magnitude of this new optical signal is given by
� � - � � � � � � � �� � � � �
��� � � ����� � � � � ��� � ��� (2.28)
where � � � � � � for two-tone products and�
for three-tone products and � � is the peak input power of
the � th user.� � is the wavelength (frequency) dependent group velocity of the fiber. The efficiency�
is given by ��
���
��� � � � � � � � � � ����� ����� � � � � � � �
� ��� ����� � � � � (2.29)
The quantity � � is the difference of the propagation constants of the various waves due to disper-
sion,
� � �� � � � � � � � � � � � ����� �� � ��� � � �� � � � � � �
�� �� � � � �� � � ��� � �
� � � � � � �� � � (2.30)
where the dispersion � �� � and its slope are computed at � � . This analysis can be extended to mul-
tiple amplifier spans [61, 62, 63]. For sufficiently low fiber dispersion � � ��,���. Dispersion
maps are specially designed to minimize FWM in WDM systems; however, the choice of dispersion
maps is still very empirical and does not even use the simple model presented above very well.
Stimulated Raman scattering (SRS) is a result of the interaction between the optical field and
the vibrations of the silica molecules, causing frequency conversion of light and attenuation of short
wavelength channels in WDM systems. If two optical waves at different frequencies are co-injected
into a Raman active medium, the lower frequency (longer wavelength) experiences an optical gain
generated by and at the expense of the higher frequency (shorter wavelength) wave. Raman gain
34

can be used to obtain amplification in Raman fiber lasers and Raman fiber amplifiers. When a single
user’s signal is propagating along the fiber, the higher frequency components get pumped into lower
frequencies resulting in a shift in the mean frequency of the wave. This phenomenon is referred to
as self-frequency shift.
Using the results from single pulse propagation experiments in applied physics, the Raman effect
can be explained by [20, 65]� � � - � � � � � ���
� ��� -�� � - � � ����� � - � � � � � � � � - � � � � � � � � � � � � � � (2.31)
where the Raman gain coefficient can be expressed in terms of the third-order susceptibility function
as
��� - ��� - � � � � � - ���� - � � � ��� Im
� � � � -�� �'� - � ��- � ��� (2.32)
for � �� � � ,
��
� � � and���� � . The Raman gain coefficient ���� - � � - � � is given in [31, Fig.
2] for a pump wavelength � � (corresponding to frequency - � ) of� ��� ; ���� - � � - � � scales by
��� � � . Dopants such as boron, germanium, or phosphorus do not appreciably modify the silica gain
spectrum; however, glasses like pure � � � � have Raman gain coefficient ten times that of silica.
The gain profile is quite different for different silicate glasses. The Raman gain as a function of the
frequency difference - � � - � increases linearly from 0 to its maximum at a frequency difference
of about� � � � � � GHz (for silica), which makes it impossible (without some compensation) to have
more than�-�
users in a WDM system operating in the wavelength range��� � � � m to
���� � m, i.e., a
bandwidth of about���
THz.
2.2.4 Optical Amplifiers
Optical amplification is becoming popular as techniques of fabricating high bandwidth, low noise,
low cost and easily controllable (by doping) erbium-doped fiber amplifiers (EDFA) are being de-
veloped. An optical amplifier increases the power of the signal optically using the energy from a
pump source typically (for EDFAs) at a wavelength of � �
nm, where the signal typically resides in
35

the� � � �
nm range. Unfortunately the amplifiers also add noise from spontaneous emission, which
is proportional to the amplifier gain. This noise is itself amplified by the amplification mechanism,
and thus is called amplified spontaneous emission (ASE) noise. When a cascade of amplifiers are
used, this ASE noise accumulates along the length of the fiber, thus affecting the noise statistics at
the receiver.
For link lengths longer than��� �
km, a chain of amplifiers is used, usually equally spaced along
the link. Fiber amplifier chains are typically classified as [27]: (i) Type A chains, using a booster
amplifier at the transmitter to increase the power generated by the laser. (ii) Type B chains, employ-
ing in-line amplifiers only between the transmitter and receiver, to compensate for the attenuation
in the fibers. (iii) Type C chains, using a receiver pre-amplifier to increase the signal-to-noise ra-
tio just before the signal is incident on the photo-detector. (iv) Type AC chains, which we call the
amplifier chains that use both booster amplifier and receiver pre-amplifier in addition to in-line am-
plifiers. The problem of determining the optimum location of the amplifier (when only one amplifier
is used) in a link was considered by Fellegara [66]; however, linear dispersion and fiber nonlineari-
ties, which play a dominant role in determining the amount of interference and noise at the receiver,
were ignored.
Currently, there is no known analytical mechanism to account for the spectral density of the
optical amplifier ASE noise, and the receiver statistics are typically found assuming this noise to
be white. Due to the interaction of linear dispersion and fiber nonlinearities, there is a parametric
process set up in the fiber which amplifies different spectral components differently. The noise
spectrum at an instance of time depends on the signal at that time. This needs to be accounted for in
the receiver statistics.
The amplifier gain increases linearly with the pump power till population inversion is complete.
As the gain does not increase above a certain pump power level, the amplifier is said to be in sat-
uration. The amplifier is no longer linear when operating in the saturation region, and the output
power level is constant, irrespective of the input power level. The gain of an amplifier is given by
36

[20, 27, 67]
� � � � �� � �� ��� ����� � $���
� � �� (2.33)
where � � is the small-signal gain of the amplifier, � � � is the input power to the amplifier at which the
gain is being measured, � � $ is the saturation power at the input of the amplifier, which is typically
� �dBm. The parameter � � determines the steepness of the EDFA gain saturation curve; higher
� � implies steeper change in the EDFA gain in the saturation region. In under-sea systems, where
stability against fluctuations is an important criterion, driving an amplifier into saturation is desirable
[67].
For low input power levels, the fiber amplifier can be modeled as a linear filter with transfer func-
tion� � - � , where � - � is the frequency dependent gain of the amplifier. The ASE noise can
be assumed to be circularly symmetric complex Gaussian distributed with power spectral density
� - � � � ��� � - � � � ��� W/Hz, where � is the optical frequency of operation, � ��� is the spon-
taneous emission parameter, which is a measure of degree of inversion achieved in the amplifier
[27].
2.3 Photo-detector and Receiver
Response times of most recent PIN photo-detectors are on the order of � � to � � psec, i.e., we can
achieve data rates of about � � -���
GHz. However, in this study we model the photo-detector as an
ideal square-law device with an infinite bandwidth, i.e., the photo-detector does not filter the received
signal at all.
Various receiver structures have been proposed to remove the deleterious effects of inter-symbol
interference (ISI) caused by linear dispersion, depending on the criterion used for optimality and
the encoding scheme used [24, 29, 30]. The linear dispersion and fiber nonlinearities introduce
pulse-to-pulse interactions. Sequential decoding is known to be the optimal method of decoding,
which has to be implemented in the electronic domain, since the optical processing provides only a
37

limited processing functions. The electronic processing, as we discussed before is slow; therefore,
we concentrate on finding the optimal optical fiber parameters that makes threshold detection in the
electronic domain sufficient to obtain optimal performance.
2.4 Performance Evaluation
Most performance analysis relies of the receiver�
, which is defined as [54]
��
� � � � �� � � � � (2.34)
where � � is the mean of the received electrical current at the receiver (at the sampling instant � )when the bit
�� ' � � � ( is transmitted, � �� is the corresponding variance of the received electri-
cal current (at the sampling instant � ) at the receiver. The mean � � includes the linear dispersion
and fiber nonlinearity effects that introduce inter-symbol and inter-channel interference. The vari-
ance accounts for different noise and beat terms at the receiver. The beat terms include the signal
quantum noise, spontaneous emission quantum noise, signal-spontaneous emission beat noise and
spontaneous-spontaneous beat noise, respectively.
Mean and variance terms required for calculating the receiver�
are calculated by two methods:
semi-classical analysis and from moment generating function (MGF). In semi-classical analysis of
the photo-detection process, the variance includes various beat terms between the linear portion of
the received signal and the ASE noise at the receiver [27, 54]. It is not clear how the nonlinear
interference terms due to fiber nonlinearities add to the signal and how they affect the variance of
the signal. Using the moments derived from MGF, the mean and variance can be calculated includ-
ing various contributions of the nonlinear effects and beat terms of the signal and the ASE noise.
Although, it is not emphasized in literature, it is generally understood that the effects of fiber nonlin-
earities can be included in the MGF and the effects of fiber nonlinearities can be properly accounted
for when calculating the mean and variance terms in the Gaussian approximation. However, the
spectral distribution of the ASE noise is typically assumed to be white in the derivation of MGF.
38

This could be problematic in the design and analysis of WDM systems, where the spectral distribu-
tion of ASE noise is an important consideration.
The derivation based on semi-classical analysis [27, 46, 66] gives the same results however, with
different approximations and slightly different expressions. Sometimes receiver�
is determined
using the eye opening from eye-diagrams. the Modified Chernoff bound is popular in optical receiver
filter analysis [68] and optical pre-amplifier analysis [54, 69]. MCB provides a tighter upper bound
on the probability of error than that provided by receiver�
(i.e., assuming Gaussian distribution).
We include the effect of shot and thermal noise in Chapter 5 and derive the moment generating
function (MGF) of the output current of the photo-detector including the effects of linear dispersion,
fiber nonlinearities and ASE noise from amplifiers. Analytical upper bounds on the probability of
error are derived for a general optical communication system. However, in the input parameter
optimization, we consider the received pulse shape and the optical signal-to-interference ratio (SIR,
interference caused by linear dispersion and fiber nonlinearities) of the signal used by the receiver
to make decisions about the information sent by the transmitter. We consider maximizing this SIR,
neglecting the shot and thermal noise from the photo-detection process and the electronic circuitry,
respectively.
39

Chapter 3
Volterra Series Transfer Function (VSTF)
In this chapter, we present the derivation of the Volterra series transfer function (VSTF) and compare
its performance in modeling the linear dispersion and fiber nonlinearities with that of the split-step
Fourier (SSF) approach. We present three potential applications of the VSTF approach where it is
better in analyzing the system performance than the SSF method.
The Nonlinear Schroedinger (NLS) wave equation (either in the time-domain (2.13) or the
frequency-domain (2.17) for monochromatic light) has a closed-form solution for no linear disper-
sion, no Raman effect and no higher-order fiber nonlinearities, i.e.,�� �
�� �
�� �
�,
� � - � � �,
and � � � � � � � � � �, [20]
� ��� � � � � ��� � ��� � �� ' � $ � �,� ' � � � �� � ����� ��� � (3.1)
where � ��� �� � ��� � ������ is the effective length of the fiber. This equation is (2.23) with the linear
attenuation of the fiber included.
When dispersion is present, the NLS equation (2.13) or (2.17) is generally solved (for a given
input field) using recursive numerical methods such as the SSF method or finite-difference methods
[20, 38]. The fiber is divided into small segments and the output of each segment is found numeri-
cally. Very small segment lengths are required to get accurate results; therefore, the computational
cost becomes prohibitively high for long lengths of fibers and short pulse-widths, which are impor-
tant for future systems. If the segment lengths are increased to reduce these effects, the accuracy
40

in representing fiber nonlinearities decreases. Furthermore, the discretization errors can accumulate
along the length of the fiber, thus generating erroneous results.
Since the SSF method implements the linear portion of the NLS equation in the frequency-
domain and the nonlinear portion in the time-domain, large variations in the phase of the field,
caused by fiber dispersion results in large amplitude variations in the output field because of switch-
ing between frequency- and time-domains. Representing these large variations requires very high
sampling rates, which increases the computational cost considerably. Since smaller pulse-widths
suffer larger linear and nonlinear phase changes, to avoid switching, both the linear and nonlin-
ear portions of the NLS equation can be implemented completely in the frequency-domain using
Francois’ method at the cost of additional computations for each recursion.
In finite-difference methods [20], both the linear and nonlinear portions of the NLS equation
are implemented either completely in the time-domain or completely in the frequency-domain. The
time-domain finite-difference methods involve discrete time-derivatives and are therefore not very
accurate, unless the time step size is excessively small. The frequency-domain finite-difference
methods are not employed in general because the nonlinear portion of NLS equation in the
frequency-domain requires integration in the frequency domain for each recursion, which becomes
computationally prohibitive for small pulse-widths that are highly dispersive and nonlinear.
The Runge-Kutta method is a numerical (recursive) method of solving a nonlinear differen-
tial equation, and thus can be used to solve the NLS equation either in the time-domain or in the
frequency-domain. Depending on the specified accuracy, the segment length changes as the pulse
propagates along the fiber, adjusting itself as the pulse evolves. The Runge-Kutta method is typ-
ically computationally very expensive (16,600 integration steps for a fiber length of� �
km [38]),
which can become prohibitive for practical lengths of fibers used in communication applications
( � � ��� km). Moreover, the Runge-Kutta method still requires switching between the frequency- and
time-domains, since the nonlinear portion of the NLS equation is implemented in the time-domain
to reduce computational cost.
41
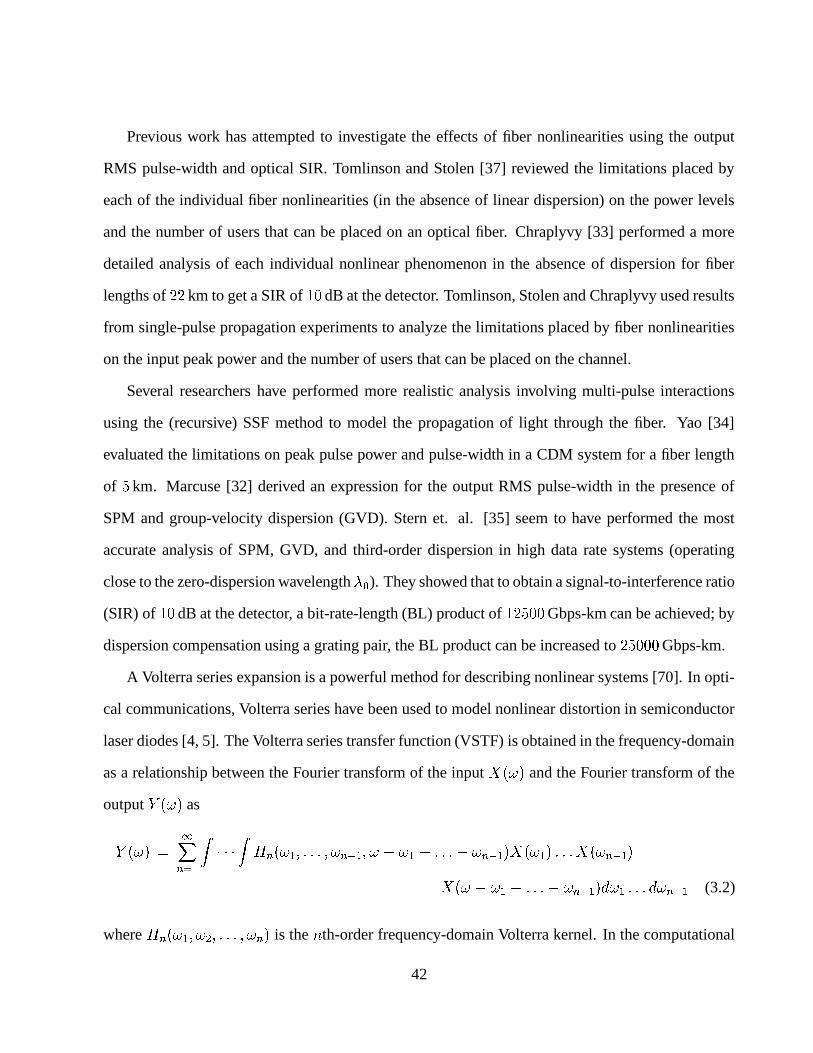
Previous work has attempted to investigate the effects of fiber nonlinearities using the output
RMS pulse-width and optical SIR. Tomlinson and Stolen [37] reviewed the limitations placed by
each of the individual fiber nonlinearities (in the absence of linear dispersion) on the power levels
and the number of users that can be placed on an optical fiber. Chraplyvy [33] performed a more
detailed analysis of each individual nonlinear phenomenon in the absence of dispersion for fiber
lengths of � � km to get a SIR of���
dB at the detector. Tomlinson, Stolen and Chraplyvy used results
from single-pulse propagation experiments to analyze the limitations placed by fiber nonlinearities
on the input peak power and the number of users that can be placed on the channel.
Several researchers have performed more realistic analysis involving multi-pulse interactions
using the (recursive) SSF method to model the propagation of light through the fiber. Yao [34]
evaluated the limitations on peak pulse power and pulse-width in a CDM system for a fiber length
of�
km. Marcuse [32] derived an expression for the output RMS pulse-width in the presence of
SPM and group-velocity dispersion (GVD). Stern et. al. [35] seem to have performed the most
accurate analysis of SPM, GVD, and third-order dispersion in high data rate systems (operating
close to the zero-dispersion wavelength � � ). They showed that to obtain a signal-to-interference ratio
(SIR) of� �
dB at the detector, a bit-rate-length (BL) product of� � � � � Gbps-km can be achieved; by
dispersion compensation using a grating pair, the BL product can be increased to � ��� � � Gbps-km.
A Volterra series expansion is a powerful method for describing nonlinear systems [70]. In opti-
cal communications, Volterra series have been used to model nonlinear distortion in semiconductor
laser diodes [4, 5]. The Volterra series transfer function (VSTF) is obtained in the frequency-domain
as a relationship between the Fourier transform of the input� - � and the Fourier transform of the
output � - � as
� - � � ���� � � � � � � � � - � � � � � ��- � ��� ��- � - � � � � � � - � ��� � � - � � � � � � - � ��� �
� - � - � � � � � � - � ��� � � - � � � � � - � ��� (3.2)
where� � - � ��- � � � � � ��- � � is the � th-order frequency-domain Volterra kernel. In the computational
42

model, only the the most significant terms are retained. It will be shown that the higher-order ker-
nels in the resulting VSTF model are not necessary to obtain good agreement with existing methods.
Francois [38] proposed the frequency-domain NLS equation (2.17) for use in ultra-short pulse mea-
surements. In this chapter, we derive a VSTF to solve their equation and compare the results with
those obtained using the SSF method. In addition, the VSTF is derived for the time-domain NLS
equation (2.13).
Depending on the accuracy required, the VSTF can be computed to any order of nonlinearity,
analytically. The VSTF can be used to describe the combined effects of linear dispersion and fiber
nonlinearities. Since the model provides a closed-form solution, it can be used to determine an
inverse function to design a nonlinear equalizer. The Volterra series approximation can be found
for most arbitrarily complex models available in the literature to describe the linear and nonlinear
polarization induced in the fiber [58]. However, since the particular model presented in this study is
intended for use in communication applications, it must be considered as an initial step for develop-
ing suitable models for use in applied physics research. This particular model ignores the waveguide
properties of the fiber [40], the higher-order fiber nonlinearities [20], etc.
3.1 Derivation of Volterra Series Transfer Function
Taking the Fourier transform of (2.13), or writing (2.17) in a general form yields� � - � � ���
� � � - � � - � � � � � � � � - � ��- � ��- � - � � - � � � - � � � � � � - � � � � � - � - � � - � � � ��� - � � - �(3.3)
where the linear dispersion kernel � � - ��� � � �� � � � � - � � � �� - � � � � �� - � describes the linear effects
and the fiber nonlinearity kernel
� � - � ��- � ��- � � � � � � � � � � - � � - � ��- � � � � � - � � � � - � � - � ��� � � � � � � - � � - � � (3.4)
describes the third-order fiber nonlinearities. The VSTF for the frequency-domain model [38] is
the same as derived here except that � � - � � � � - � � � � - � and � � - � ��- � ��- � � � � � �
43

� � � ���&������ � � � � � � � � � � - � � - � ��� .We seek an approximation to the above VSTF as described in (3.2) with the input field
� - � �� - � � � as the input
� - � . Retaining only the first five kernels in the VSTF in (3.2), we obtain the
input-output relationship
� - � � � � �� - � � � � - � � ��� � � - � ��- � ��- � - � ��- � � � � � - � � � � - � � � - � - � � - � ��� - � � - �� ������� ��� - � ��- � ��- � ��- � ��- � - � ��- � � - � � - � �
� - � � � � - � � � - � � � � - � �� - � - � � - � � - � ��- � � � - � � - � � - � � - � (3.5)
where�� - � � � is the linear transfer function,
�� - � ��- � ��- � � � � and
��� - � ��- � ��- � ��- � ��-� � � � are
third- and fifth-order nonlinear transfer functions (Volterra kernels) of an optical fiber of length � ,
respectively. Note that due to the absence of even order nonlinearities in an optical fiber, all the
even-order kernels are set to zero. The initial conditions for the kernels are�� - � � � �
�, and
� � - � ��- � � � � � ��- � � � � � �, for � � � � � � � � �
Substituting (3.5) in (3.3) and comparing the first-, third-, and fifth-order terms gives us differ-
ential equations: � �� - � � ���
��� - � � � � � - ��� (3.6)� �
� - � ��- � ��- � � � ���
� � � - � � - � � - � � � � - � ��- � ��- � � � ��� � � - � ��- � ��- � � � � - � � � � � �� - � � � � � � - � � � �
(3.7)
and� ��� - � ��- � ��- � ��- � ��-� � � ��
�� � � - � � - � � - � � - � ��- � � ��� - � ��- � ��- � ��- � ��-
� � � �
� � � - � ��- � ��- � � - � � - � � � � - � � � � � �� - � � � � � � - � ��- � ��-
� � � �
� � � - � ��- � � - � � - � ��-� � � � - � � � � � �
� - � ��- � ��- � � � ��� - � � � �
� � � - � � - � � - � ��- � ��-� � � � - � ��- � ��- � � � � � �
� - � � � ��� - � � � � (3.8)
44

Solving these three differential equations yields�
�� - � � � � � � � � �� � � ��� �� � ��� � � � ��� � � � � ��� � � � � � (3.9)
which agrees with (2.19),
�� - � ��- � ��- � � � � � � � - � ��- � ��- � � � � � � � � � ��� � ����� � � � �������� � � � � � � � ���&�����&� �
� � - � � � � � � - � � � � � - � � � � � - � � - � ��- � � (3.10)
and��� - � ��- � ��- � ��- � ��-
� � � � � ��� - � ��- � ��- � ��- � ��-
� � � �� � � � � � ��� � ��� � � � ��������� � ��� � � � � ���&�
� � � �,� � � � � � � � � � � ����� � � � � � � � � �������� � � � � ��� � �� ��� � ��� � � ��� � � � ����� � ��� � � � � � � ���&����� � � � ����� � ���� � � � � � � � � ������� � � ��� � � � �����&� � � � � � � ���&����� � � � �������
� � � � � � � � � � � ��� � � � � ��� �� � � � � � � � � ���� � ������� � � ���,� � ��� � � � � � ��� � ��� � ������� � �
� � � � � ��� � �� � � � � � ��� � � ��� � � � � � ��� � � � � � � � � ��� � � � � ��� � � ���� � � � ��� ��� � ��� � ���,��� � ��� � � ����� � � � � � � ���&��� � � � � �����&�
� � � � � � ���&����� � � � � ���&��� � � � � ��� � ������ � � � � � ��� � � � � � � � � � � � � � � � � � � ��� � �
� � � � � ������� � � ��� � �� � � � ��� � � ��� � ��� � � � � � � ���&����� � � � ����� � ���� � � � � � � ��� � � � ��� � � � � � � � � � � � � � � � � � � ��� � � � � ��� � �
(3.11)
where��� - � ��- � ��- � ��- � ��-
� � � � �� � � � � ��� � �� ��� � ��� � � � � � ��� � �� � � � ��� � � ��� � ��� � � � � � � ���&����� � � � ����� � ���
� � � � ��� � � � ������� � � ���,��� � � � � � � � � � ����� � � � � � � ��������� � � � ������� �
� � �� � � � ��� � ��� � � � �����&��� � ��� � � � � ���&�� � ���,��� � � � � � ��� � � ����� � � � ��� � � � �����&� � � � � � � ��� � ���&��� � � ���&������ ��� � � � � � � �
� � � ����� � � � ���,��� � � � � � � � � � � ��� � � ����� � �� � � � � � ���&����� � � � � ���&��� � � � � ��� � ������ � � � � � � � � ����� � � � ���,� � � � � � � ���&�������
(3.12)
The third-order Volterra kernel in (3.10) describes the interaction between the third-order fiber non-
linearity kernel � � - � ��- � ��- � � and the third-order nonlinearity due to the linear dispersion kernel
� � - � � . The fifth-order kernel in (3.11) and (3.12) similarly consists of products of the fifth-order
fiber nonlinearity kernels and the fifth-order effects due to the linear dispersion kernel. Fortunately,
the three parts of the kernel in (3.10) are factorable allowing significant simplification. The input-
output relationship in (3.5) now becomes
� - � � � � � � � � �� � - � � � � �� - � ��- � ��- � - � ��- � � � � � - � � � � - � � � - � - � � - � ��� - � � - �
� � � �� - � ��- � ��- � - � � - � � � � ��� - � � � � - � � � - � - � � - � � � � - � � � � - � � � - � - � � - � �
� � - � � � � - � � � - � - � � - � ����� - � � - � � � � � � � �� - � ��- � ��- � ��- � ��- � - � � - � � - � � - � � � �� - � � � � - � � � - � � � � - � �
� - � - � � - � � - � � - � ��� - � � - � � - � � - �(3.13)�The expression in (3.6) is equivalent to �
�� ���� , whose solution is of the form �� ���� � , and substituting the linear
kernel in (3.7), we can write the equation (3.7) as ���
������������ � , yielding �� ����! #"%$&�!'!"� $ � . The third equation (3.8) canbe solved similarly.
45

where
� - � � � � � � - � ��- � ��- � - � � - � �� � - � ��� � � � - � ��� � � - � - � � - � � � � � - �
� - � � � � - � � � - � - � � - � ��� - � � - � (3.14)
This equation gives us the VSTF that we are seeking. Whenever we want to increase the accuracy
of the model, higher-order Volterra kernels can be included in (3.5) and those kernels can be derived
in the same way as shown above. The error incurred in ignoring the kernels of order higher than � is
proportional to � ��� � � � � , where � is the peak power of the optical field. In our case since we ignore
the kernels of order higher then 5, the error is proportional to ��� � � .The following are the advantages of the VSTF approach:
1. The availability of a closed-form transfer function allows us to design a complete system or
design a lumped nonlinear equalizer to compensate for the linear dispersion and fiber nonlin-
earities simultaneously.
2. In a WDM system, the effects of various users on the performance of the user of interest can
be separated. In contrast, the SSF method sets the nonlinear effects from other users to zero,
and analyzes the individual effects of each user separately, thus solving the NLS equation
recursively for each case.
3. We can study bi-directional systems with the Volterra series techniques much better and faster
than the SSF methods. SSF methods requires to be executed in each direction of propagation
of light recursively to get an idea of how the nonlinear interaction between the signals traveling
in both directions interact with each other.
4. In a WDM system with wide-band interference (e.g., from other users), we can calculate the
frequency content of the signal of interest separately without having to calculate the evolution
of the interference over the entire spectrum, thus drastically reducing the number of necessary
computations.
46

5. Knowing the statistical nature of the input signals of the interfering users in a multi-user
(WDM, TDM, or CDM) system, an optimal detector can be designed for removing the inter-
channel interference at the receiver.
6. We can calculate the effects of phase noise on the performance of a direct-detection receiver.
Actually, the VSTF method is invaluable where statistical quantities related to the wave prop-
agation are required. When using the SSF method, we have to resort to Monte-Carlo simu-
lations to study any statistical phenomenon such as the polarization mode dispersion (PMD)
[22, 23]. With the VSTF method, we can get analytical expression for the output field in terms
of the fiber parameters, both deterministic and stochastic, and find the required statistical
quantities in an analytical form.
The effects of four wave mixing (FWM), laser nonlinearities, detector nonlinearities, transfer
functions for fiber amplifiers and possible nonlinear or linear waveguide couplers in the system can
be easily included in the VSTF model. Instead of expanding the third-order susceptibility of these
devices, � � � - � ��- � ��- ��� - � , using a Taylor series with coefficients, � � , � � , and � � , and � � and then
deriving the nonlinear Schroedinger (NLS) equation as done in [20, 34], � � � - � ��- � ��- ��� - � can be
retained in its original form. This more accurate description can then be included in the VSTF. The
transfer function of the wavelength selective switches in WDM systems, synchronous demultiplexers
in TDM systems, etc. can also be easily included in the final transfer function.
The integrals in the Volterra series expansion were calculated numerically using a trapezoidal
rule. Therefore, the computational complexity depends on the sampling interval used to represent
the signal in the frequency domain. The computations for the VSTF method are ���� � ��� � , where
� is the number of sampling points used to represent the field and � is the order of the highest-order
nonlinearity included in the approximation. The SSF method is at most � � �������� �#��� , where
� � is the number of segments along the length of the fiber. The computational load for the VSTF
method is offset for longer lengths of fibers by the fact that this method is not recursive and does not
47

accumulate discretization errors. Though the VSTF method may not present an advantage compared
to the SSF method in terms of computational complexity, its real power lies in the availability of a
closed-form solution that is amenable to analytical study and optimization.
Although the VSTF method is a complete Fourier domain method, it does not suffer from the
discretization errors of recursive Fourier domain methods, like the Runge-Kutta method used by
Francois [38], since it only performs the nonlinear operation once. The VSTF method compares
favorably with the SSF method in terms of computational cost, except for very small lengths of
fibers, because it solves the NLS equation entirely in the frequency domain. One disadvantage of the
VSTF method is the requirement to include higher-order kernels for higher power levels. However,
the fifth-order approximation seems to be sufficient for the power levels that are being considered
for future communication applications.
We first show that the VSTF method can perform as well as the SSF method for single-frequency
analysis. Then we address advantages (1) and (2) listed above as examples of the applicability of
our method.
3.2 Numerical Results
We assume that the laser generates a Gaussian pulse shape with intensity [20]
� ��� � � � � ��� � � � � � � � �������� �
� � � � � � � � � � � (3.15)
where � is the maximum instantaneous power,�
is the chirp parameter and � is the width of
the pulse. In our numerical computations, we have chosen to use�
��. We assume that the
optical system is operating at the zero-dispersion wavelength, ��� ���� � � � m, corresponding to a
central frequency� � � � ��� THz. The linear dispersion terms are � � �
� � � dB/km [20, pp. 6],�� �
�sec
�/m (using dispersion-shifted fiber, and operating at ��� ) and
�� �
� � � � ��� �����sec
�/m.
Using the nonlinear refractive index, � � � � � � � � ��� � � � m�/ W, and the effective cross-sectional area
of the fiber,� ��� � � � � m
�yields � � � � � � � � � ��� �
; using � � � � � � � � ��������m- � m/W [38] yields
48

����� � � ��� � � � � � �
.
We use the normalized square deviation (NSD) as a measure of the difference between the output
fields calculated by two methods of interest. The NSD between complex envelopes of the output
fields after a length of fiber � given by method�
(��� ��� � � ) and method � (
�� ��� � � ), is defined as
� � � � � �� �� � ��� ��� � � � �
� ��� � � � � � �� ����� � � �� � � ��� � ��� � � � (3.16)
First, we determine how close the results produced by SSF method and VSTF method are to
the exact solution (3.1). Since the exact solution can be computed only for no Raman effect, no
higher-order fiber nonlinearities, and no linear dispersion, we set these effects to zero and determine
the accuracy of the algorithms. Then we compare the algorithms among themselves for the cases
where the exact solution is not available.
In Figure 3.1, we have plotted the NSD between the output fields obtained by both the VSTF
method and the SSF method from the exact solution. We can see that for very low power levels
( � �� ����� � W), the third- and fifth-order approximation of the VSTF model have the same NSD
and have smaller NSD than the SSF method. The SSF method is recursive, therefore it incurs
discretization errors even in the absence of fiber nonlinearities causing the NSD to increase slightly
with increasing length.
For higher power levels, the fifth-order approximation of the VSTF method performs more than
five orders of magnitude better than third-order approximation. For the SSF method, the errors
incurred due to the use of finite segment length exceed the discretization errors seen for lower power
levels; this error also accumulates along the length of the fiber. The NSD for each of the algorithms
does not increase after a length of about��� �
km. As the attenuation reduces the power levels to very
small values, the fiber nonlinearities become negligible, and none of the methods incur errors due to
inability to model fiber nonlinearity accurately. The errors with the SSF method and the fifth-order
VSTF method are equal and negligible.
With dispersion and the Raman effect included, we can no longer calculate the exact solution;
49

Power = 1e−10 W
Power = 1 m W
Power = 30 m W
101
102
10−25
10−20
10−15
10−10
10−5
100
Length (km)
Norm
aliz
ed S
quare
Devia
tion
Figure 3.1: Normalized square deviation of the output field for no Raman effect and no dispersion fordifferent input peak powers. The SSF method from the true solution is shown with lines, the third-order VSTF method from the true solution is shown with ’ � ’, and the fifth-order VSTF method fromthe true solution is shown with ’+’.
50

therefore, we calculate the NSD of the output field obtained by the third- and fifth-order approxima-
tion of the VSTF method to the output field computed by the SSF method. We can see from Figure
3.2 that for small power levels the deviations are again negligible. For higher power levels the devia-
tion between the SSF method and the fifth-order VSTF is five orders of magnitude smaller than that
with the third-order VSTF approximation indicating that the solutions are converging. However, it
is not certain which algorithm is limiting the deviation, i.e., which algorithm is more accurate. Since
the deviation of the SSF method from the fifth-order approximation of the VSTF method is very
small, we can expect both methods to perform equally well in practical situations.
Figure 3.3 shows the output spectrum for an input pulse with RMS width � ���� �
psec, input
peak power � �� �
mW and a fiber length of� � �
km.�
To exaggerate the nonlinear effects, we
assume that linear attenuation is zero. The waveforms are similar to those given in [20, Fig. 4.14],
except for the Raman effect which we include. We see that the output given by the fifth-order VSTF
method is exactly the same over the entire spectrum as that given by the SSF method, whereas the
third-order VSTF method is less accurate. In a practical situation with typical values of attenuation,
� � , the third-order approximation should be sufficient.
Figure 3.4 shows the effect of pulse-width on the performance of the above mentioned methods
when Raman effect is included. The NSD between the third-order approximation to the VSTF
method and the SSF method is increasing steadily as the pulse-width increases till a certain pulse-
width and then stays constant after about � � � psec. We believe that this deviation is dominated
by the VSTF method; the third-order approximation of the VSTF is not sufficient for modeling the
fiber nonlinearities for large pulse-widths and large power levels. The SSF method performs quite
well for large power levels and large pulse-widths.
Including the fifth-order kernel does not change the dependence of NSD on the pulse-width for
lower power levels (�
mW); for higher power levels, the curves become concave. This supports�This represents a highly dispersive case and highly nonlinear case with fiber length � �� ���� �� ��� , where ���� is
the dispersion length and ��� is the nonlinear length [20].
51

Power = 1e−10 W
Power = 1 m W
Power = 30 m W
101
102
10−25
10−20
10−15
10−10
10−5
100
Length (km)
Norm
aliz
ed S
quare
Devia
tion
Figure 3.2: Normalized square deviation of the output field for no Raman effect for different inputpeak powers the third-order VSTF method from the SSF method, shown with lines, and the fifth-order VSTF method from the SSF method, shown with ’ � ’.
52

input pulse spectrum split−step Fourier method third−order Volterra kernel method fifth−order Volterra kernel method compensated frequency spectrum
−4 −3 −2 −1 0 1 2 3
x 1011
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Frequency (Hz)
No
rma
lize
d s
pe
ctr
um
of
the
ou
tpu
t fie
ld
Pulsewidth = 1.5 psec.
Length = 168 km
Figure 3.3: Magnitude squared of the Fourier transform of output field.
53

P = 1 m W
P = 10 m W
P = 30 m W
100
10−12
10−10
10−8
10−6
10−4
10−2
100
Pulsewidth(psec)
Norm
aliz
ed S
quare
Devia
tion
Figure 3.4: Normalized square deviation of the output field of third- (shown with lines) and fifth-order VSTF method (shown with ’ � ’) from SSF method, showing the dependence of NSD on inputRMS pulse-width for a length of ���
��� �km.
54

the idea that the deviation for longer pulse-widths is dominated by VSTF method and the deviation
for smaller pulse-widths is dominated by the SSF method. The increased error for smaller pulse-
widths for the SSF method is due to the error incurred in switching between the time and frequency
domains, when the phase changes very rapidly (faster for smaller pulse-widths) due to the third-order
dispersion; furthermore, the nonlinearity amplifies this error. For larger pulse-widths, the spectrum
is very narrow in the frequency domain; this requires higher resolution (in a small spectral region)
than the value chosen for this comparison. Thus the filtering due to linear dispersion is not well
represented in the frequency domain, leading to errors for the VSTF method.
The third-order approximation to the VSTF method thus performs at least as well as the SSF
method in representing the linear dispersion and fiber nonlinearities for a comparable computational
cost. A disadvantage of the VSTF method seems to be the need to include higher-order kernels for
higher power levels. For a fifth-order approximation, the computational cost is considerably higher
than the SSF method. Third- and fifth-order kernels seem to be enough for the power levels that are
being considered for future communication applications.
3.3 Potential Applications
We consider briefly the analysis of signals at multiple frequencies and then design equalizers to
remove the nonlinear effects due to the fiber in single-user systems. We then present a potential
application of the VSTF tool in determining optimal input parameters for a given channel to get
minimum output RMS pulse-width and maximum signal-to-interference ratio (SIR).
3.3.1 Two-signal Analysis
We evaluate the performance of the VSTF model in representing the self-phase modulation (SPM),
cross-phase modulation (CPM), stimulated Raman scattering (SRS), and other nonlinear effects in
communication systems when two signals at different frequencies are propagating down the fiber.
We consider the case of a pump field�
� ��� limited to the frequency range� - ��� ��- ��� � with central
55

Term Frequency-range Central frequency Effect� � � �� � � ���- ��� � - � � � � - � � � - � � � - � SPM & self-pumping
�� � � �� � �
� - ��� � - ��� � - ��� ��- ����� - � � � - ��� � - � Raman & SPM & CPM� � � �� � � �� - � � � - ��� � � - � � � - ��� � � - � � - � FWM & Raman Effect�
�� �� � �
�� - ��� � - � � � � - ��� � - ��� � � - � � - � FWM & Raman Effect
�� � � �� � �
� - � � � - � � � - � � ��- ����� - � � � - � � � - � Raman & SPM & CPM��� ����
�� - � � � - ��� � � - ��� � - ��� � - � SPM & self-pumping
Table 3.1: Various components of the output signal due to fiber nonlinearities and the presence ofpump pulse.
frequency - � and a signal field� � ��� in
� - � � ��- � � � (possibly overlapping with� - ��� ��- ��� � ) with cen-
tral frequency - � . Francois [38] has shown that this situation can be modeled quite well by the
frequency-domain NLS equation (2.17). The third-order VSTF model for the total field can be
written as
� - � � � ��� - � � � � � � - ��� � � - ���&� � � �
� - � ��- � ��- � - � � - � � � � � � � - � � � � �� - � ���� ���� - � � � � �� - � � � � � - � - � � - � � � � � - � - � � - � ��� � - � � - � � (3.17)
The contributions of various physical phenomena and their relation to the third-order approximation
to the output filed given by (3.17) are provided in Table 1. This table explains how the NLS equations
models all the nonlinear phenomena observed in practice. Using this table, we can study which fiber
nonlinearity dominates the interference in communication systems, thereby giving us an idea of
which effects we should try to cancel with the nonlinear equalizer or which effects to try to reduce
when designing better optical links.
In communication system analysis, we are generally interested in the effect of the pump pulse
on the signal pulse and not in how the pump develops as it propagates along the fiber. Since the
SSF method and other existing methods are recursive, calculation of the evolution of the pump pulse
over the entire spectrum is required. With the VSTF method, since we have a closed-form solution
for the Fourier transform of the complex envelope of the field at the output, we can just calculate
the frequency content around the signal component of interest and ignore the rest of the spectrum,
56

which could mean a considerable reduction in the necessary computations.
In multi-frequency analysis, because of the approximations made in using a finite segment length
(typically�
km), the output fields obtained using the SSF method are very sensitive to the segment
length used; if the segment length is accidentally chosen such that the phase matching condition
is satisfied, the SSF method predicts signals at frequencies where there should not be any signal.
This problem is rectified if a slightly different segment length is used. Therefore to guard against
unfortunate (incorrect) phase matching conditions, numerical calculations have to be repeated with
different segment lengths. The VSTF method is advantageous in such situations as it does not suffer
from these phase matching problems.
A signal pulse of input RMS width of�
psec with a power of � � mW, and a pump pulse of
RMS width�
psec with a power of� � �
mW is assumed. The difference between the carrier fre-
quencies is varied from� � � �
THz to�
THz for a fiber length of���
km, and the resulting change in
the performance of the third-order VSTF method is compared to the SSF method. The results were
quite satisfactory and the third-order VSTF method seems to do better than in the single-frequency
case. Since the total power (of about��� �
mW) is distributed over a wider band of frequencies, the
third-order VSTF method gives better results than for an equivalent power in the single-user case. A
segment length of� �
m is used to keep the SSF method accurate.
Figure 3.5 shows the interference-to-signal ratios for various nonlinear effects. The “signal” is
assumed to be centered at baseband with a spectral width of�
THz and the interference is calculated
as the contribution by the nonlinear phenomena in this frequency range. The nonlinear effects are
categorized as (see Table 1): (i) “signal” component,� � � �� � � , (ii) “pump” component,
��� ���� ,
(iii) “main” component, �� � � �� � � (iv) “other” component, which includes all the other terms. We
thereby isolate the single-user nonlinear effects (i.e., “signal” component) from the nonlinear effects
due to the presence of the pump pulse. Except when the pump pulse is very close in the frequency-
domain to the signal pulse, the “pump” and “other” components are insignificant. However, the
“main” component extends over a broader bandwidth. This is because of the broad spectrum of the
57

signalpump main other
−20 0 2010
−6
10−5
10−4
10−3
10−2
10−1
100
101
Inte
rfe
ren
ce−
to−
sig
na
l ra
tio
signalpump main other
−20 0 2010
−6
10−5
10−4
10−3
10−2
10−1
100
101
Frequency difference between the pump and signal frequencies (THz)
(a) Kerr effects (b) Raman effects
Figure 3.5: Interference-to-signal ratio due to the presence of a pump pulse at different frequencies.
58

Kerr and Raman effects. We notice that Raman effects are smaller than the Kerr effects. Therefore,
for these power levels, the multi-user effects can be expected to be minimal; however, a detailed
analysis needs to be carried out for the particular system of interest to confirm this conclusion.
In order to perform a similar analysis using the SSF method, we have to solve the NLS equation
over the entire spectrum instead of concentrating on the spectrum of interest as we do above for
each nonlinear effect and add these contributions carefully (which is very difficult because of the
nonlinear nature of the solution).
3.3.2 Nonlinear Equalizer
As we discussed, the availability of a closed-form approximation to the transfer function of an optical
fiber gives us a mathematical tool to design an inverse filter or a nonlinear equalizer. According to
[70, Chapter 3], from (3.9) and (3.10) we can easily find a third-order approximation to the ideal
nonlinear equalizer of length � � (ignoring the Raman effects) with first- and third-order kernels as
� �� - � � � � ��
�� - � � � � � � � � � � � (3.18)
and
� �� - � ��- � ��- � � � � � � ��� - � ��- � ��- � � � ��
� - � � - � ��- � � � � � � - � � � � � �� - � � � � � � - � � � �
� � � � - � ��- � ��- � � � � � � � � � � � � � � � ������ � � � � ���,�� � � � � � � � � ���&��������� � � - � � � � � � - � � � � � - � � � � � - � � - � ��- � � (3.19)
Therefore referring back to (3.3), we require the linear dispersion kernel for the equalizer to be
� � � - � � � � � - � � � � � and the fiber nonlinearity kernel to be � � � - � ��- � ��- � � � � � � - � ��- � ��- � � � � � � .To achieve the first condition, we require � �� � � ��� � � � � , which requires amplification. Optical
amplification can be accomplished by using Erbium doped fiber amplifiers (EDFA); however, the
nonlinearities in the EDFAs themselves needs to be taken into account while designing the equalizer.
The requirements on linear dispersion are��� � � � � � � � � for
��
� � � � and � . The first condition��� � � � � � � � � requires a non-causal filter which is not physically possible; however, if we ignore
59

the delays in the signal arrival at the receiver, the choice of��� does not affect the performance of the
equalizer at all. The other two conditions��� � � � � � � � � and
��� � � � � � � � � can be achieved using
multiple-clad fibers or waveguide couplers that have negative group velocity dispersion (GVD) and
negative third-order dispersion [20]. To keep the size of the equalizer small, we require � � � � ,
which requires the amplification, GVD, and third-order dispersion parameters to be very high.
To satisfy the nonlinear equalization condition of (3.19), we require � �� � � � � � � � � . Ignoring
the nonlinear effects of order higher than that given by � � , we want � � � � � � � � � � � , i.e., nonlinear
materials with negative nonlinear refractive index are required. Fortunately materials such as� � � & ,
� � � & , [71] and� % � � � � [58] with strong negative nonlinearities exist; however, this is currently
possible only at lower wavelengths of about� � m. Further development in the field of nonlinear
materials is required before the inverse filter of (3.19) can be physically realized.
The output waveform after this ideal nonlinear equalizer is shown in Figure 3.3. There is a
noticeable self-frequency shift in the output spectrum due to Raman effect. Although, it is possible
to calculate the exact Raman spectrum required of the equalizer, we have not assumed compensation
of Raman effects to be possible, as the Raman effect is too wide-band and tailoring the Raman
spectrum of the nonlinear equalizer would be difficult, if not impossible. Since attenuation is almost
negligible, we can see that the output energy is the same as the input energy. Because a third-
order approximation to the VSTF of the nonlinear equalizer is used, there are some oscillations in
the output spectrum, which are not caused by Raman effect and are not present for higher-order
approximations.
We have been able to design the nonlinear equalizer above due to the availability of a closed-
form solution to the NLS equation. The fiber parameters for the equalizer could have been derived
using intuition; the equalizer has to generate negative linear and nonlinear phase changes to compen-
sate for the positive phase changes introduced by the fiber. However, this derivation of an equalizer
validates the power of the VSTF and helps us in designing a nonlinear equalizer in various dif-
ferent environments where intuition does not help, e.g., multi-user equalization, presence of fiber
60

amplifiers, etc. The same approach can be used to design nonlinear coherent couplers that permit
nonlinear processing [20, 72, 73]. Following the methodology used in this chapter, the required
closed-form transfer function for a nonlinear coherent coupler can be obtained.
3.3.3 Optimal Input Parameters
We present the use of the VSTF to study the effects of linear dispersion and fiber nonlinearities on
the reliability of information in optical fiber communication systems that use direct-detection. The
output waveforms obtained using the VSTF are compared with those obtained with the SSF method.
We show the effect of the peak pulse power on the pulse shape and output RMS pulse-width in a
simple system consisting of a single stretch of fiber. We present the effect of symbol period and
peak pulse power on the signal-to-interference ratio at the detector. This analysis provides the basis
for optimizing the design of more complex future systems, as discussed in Chapter 5
Figure 3.6 shows the output waveforms for an input pulse-width of�
psec and a fiber length of��� �
km. At low power levels, the linear dispersion dominates, and it spreads the pulse by about
� � pulse-widths; as the peak power increases, the dispersion of the pulse due to fiber nonlinearities
increases, causing the pulses to spread to about � � pulse-widths for a peak power of��� �
mW.
We use the RMS pulse width for a single pulse as a quantitative measure of the effect of peak
pulse power on the output pulse-width. The RMS pulse-width is defined as
� ����� � � � � ��� � � � � � ��
(3.20)
where� � � � �
� � � � � ����� � � �� � � ����� � � � (3.21)
Figure 3.7 shows the effect of peak pulse power on the output pulse-width as a function of in-
put pulse-width. In Chapter 4, we present a similar plot for coherent and incoherent light pulses
propagating in a linear fiber; the minimum output pulse-width in that case is achieved at an input
pulse-width of � psec. In presence of fiber nonlinearities, we can see that as the peak pulse power
61

input intensity
power = 1 mW
power = 50 mW
power = 100 mW
−5 0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
−3
time/pulsewidth
norm
aliz
ed in
tensi
ty o
f outp
ut puls
es
Length = 100 km
Figure 3.6: Plots of output intensity of completely coherent light for different power levels.
62
P = 1 mW
P = 10 mW
P = 30 mW
P = 50 mW
P = 100 mW
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 62
3
4
5
6
7
8
9
10
input RMS pulse−width (psec)
ou
tpu
t R
MS
pu
lse
−w
idth
(p
sec)
Length = 100 km
Figure 3.7: Plot of RMS widths of output pulses, showing the effect of peak input power on disper-sion of the input pulse.
63

increases, the optimum input pulse-width increases. For a peak pulse power of��� �
mW, the mini-
mum output pulse-width of about � psec is achieved at a input pulse-width of about � psec. For very
low power levels, output pulse-widths as low as � psec can be achieved.
We now study the pulse-to-pulse interactions due to fiber nonlinearities in systems that use co-
herent light by calculating signal-to-interference ratios (SIR). We study the effect of pulse-width,
symbol period and peak pulse power on the signal-to-interference ratios (at the detector) due to
linear dispersion, interaction between linear dispersion and fiber nonlinearities, and nonlinear inter-
action exclusively due to fiber nonlinearities.
The output intensity is calculated as the magnitude squared of the received field� ��� � � , the
inverse-Fourier transform of� - � � � in (3.5). There are three terms in the expression for output
intensity, (i) the linear-linear interaction term, that includes the signal, the inter-symbol interfer-
ence, and nonlinear interference due to the square-law detector, (ii) the linear-nonlinear interaction
term, and (iii) nonlinear-nonlinear interaction term that includes the self-phase modulation (SPM),
cross-phase modulation (CPM), and four-wave mixing (FWM) components. The signal energy is
calculated by integrating the linear component over the symbol period of interest. The interference
energy is calculated over six adjacent symbol periods on either side of the symbol of interest. In
our simulations, we found the linear-nonlinear interaction term to be negligible (on the order of SIR
�� � � dB) compared to the other two terms. The nonlinear-nonlinear interaction term consists of the
interaction of the pulse with itself and interaction of the pulse with other pulses through the highly
coherent light used. The interaction of the pulse with itself is mainly due to self-phase modulation
and does not depend upon the symbol period used; as we increase the symbol period, all other terms
decrease almost exponentially.
Figure 3.8 shows how the SIR at the detector varies with symbol period for different peak pulse
powers. As the symbol period increases, the SIR due to dispersion increases steadily. However, the
SIR due to nonlinearities does not increase much above a symbol period of� �
psec.
Figure 3.9 shows how the SIR at the detector varies with peak pulse power for different symbol
64

SIR due to linear dispersion
SIR due to fiber nonlinearities
total SIR
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
10
20
30
40
50
60
70
80
90
100
power (mW)
10
lo
g(s
ign
al−
to−
inte
rfe
ren
ce
ra
tio
)
T = 3 psec
z = 100 km
−−− Ts = 10 psec
−o− Ts = 30 psec
Figure 3.8: Output SIR as a function of symbol period for different power levels.
65

SIR due to linear dispersion
SIR due to fiber nonlinearities
total SIR
5 10 15 20 25 30−20
0
20
40
60
80
100
symbol period (psec)
10
log
(sig
na
l−to
−in
terf
ere
nce
ra
tio)
T = 3 psec
z = 100 km
−o− P = 2 mW
−−− P = 5 mW
Figure 3.9: Output SIR as a function of peak pulse power for different symbol periods.
66
periods. We can see that the SIR due to dispersion increases enormously with the symbol period;
however, the SIR due to nonlinearities is limited by the peak pulse power. For large symbol periods
and moderate input powers, the SIR is limited by the fiber nonlinearities.
3.4 Summarized Observations
A frequency-domain Volterra Series Transfer Function (VSTF) description for the nonlinear
Schroedinger (NLS) wave equation is derived and it is shown that for most communications ap-
plications, even a third-order approximation to this model can predict the nonlinear behavior of
single-mode optical fiber remarkably well. The third-order approximation to the model is suffi-
cient for powers that the current semiconductor lasers can generate for communication applications
(� � � � mW) and for reasonable lengths of fiber (
� � ��� �km); for higher power levels, the accuracy
of the model can be increased by taking into account higher-order Volterra kernels. We have demon-
strated this by using a fifth-order VSTF method and showing that the performance is as accurate as
the split-step Fourier (SSF) method for all power levels and fiber lengths of practical interest. The
analytical method presented here is more accurate than the SSF method for long lengths and smaller
pulse-widths. The existence of an analytical model can also provide insight into the effects of non-
linearities and possible ways of removing the detrimental effects. We have provided the dispersion
and nonlinear parameters required to design an equalizer. The interference caused by a pump pulse
on the signal pulse is presented as a function of frequency difference between their central frequen-
cies. The Raman effect is shown to be smaller and less important for all frequency separations for the
parameters used here. Lastly, the output SIR for a simple communication system is given to show an
example of how the VSTF method can be used to analyze and design better optical communication
systems.
67

Chapter 4
Linear Dispersion in Fiber-opticCommunications
Before we study the effect of fiber nonlinearities on a communication system, we evaluate the effect
of linear dispersion alone. Since the phase noise of the source determines the extent of dispersion, it
is important that we include it [9, 74, 10]. The coherence time introduces a phase relation between
the field at different times and when this signal is incident on a photo-detector, this phase relation
manifests as a nonlinear interaction between pulses generating nonlinear interference. In addition,
these phase variations are converted into amplitude variations (PM-to-AM conversion [6]), adding
what we call intensity noise. We evaluate and optimize the fiber optic communication system using
the signal-to-interference ratio (SIR) as a measure of performance.
The presence of phase noise or lack of source coherence makes the dispersion effects more
severe and changes the pulse shape considerably. On the other hand, coherent light (no phase noise)
suffers most from signal-dependent nonlinear interference introduced due to the nonlinearity of the
photo-detector. The intensity (amplitude) noise generated by phase noise is found to be a maximum
for completely incoherent light (has white spectrum), while being zero for coherent light.
68

4.1 Derivation of SIR for Arbitrary Light Source
We derive the first two moments of the output of the photo-detector for the general case of partially
coherent light and then specialize the results to the cases of completely coherent light and completely
incoherent light. If we denote the impulse response of a fiber for the optical field by�� ��� , i.e., the
inverse-Fourier transform of�� - � � � in (2.19), then
� ��� � � � � ��
�� � � �� � � � � �� � (4.1)
where we have not showed the explicit dependence of�� ��� on the length of the fiber � . The ex-
pectation of the the (random) instantaneous intensity of the optical field� ��� � � that is incident on
the detector when we apply a random optical field with complex envelope� ��� � � at the transmitting
end of the fiber is given by
� � � ��� � ��� � � � � � ��� � � � ��� � ��� � � �� �
�� �� ��� � � �
� �� ��� � � � � � � � � � � � � � � � � � ��� � � � � � � (4.2)
Recalling (2.1), the three random processes affecting the signal are phase noise ) ��� , the random
pulse phase ' )'� ( ��� �� , and the data stream ' & ��( ��� �� . The first and second moments of the intensity
over just the phase noise are given by
� � � ��� � ��� ���� � ��� "$� � � �� �
�� �� ��� � � �
� �� ��� � � � � � � � � � � � � � � � � � $ � � � � $ ����� ��� � � � � � � (4.3)
and
� � � ��� � � � � � � � � �� � � ��� #"$� � � �� �
�� � �� �
�� �� � � � � �
� �� � � � � �
�� � � � � �
� �� � � � � �
�� � � � � � � � � �� � � � � � � � � � � � � � $ � � � � $ ������� $ ��� � � $ � ��� � � � � � � � � � � � � � (4.4)
Using the fact that ) ��� is a Wiener-Levy process, i.e., a Gaussian process with zero mean and
correlation function � � ) ����) � � ��� � � ��� ��� � ��� � � , we can easily show that the mean is
� � � ��� � � � �� � � ��� "$� � � �� �
�� �� � � � � �
� �� � � � � � �� � � � � � � � ��� �&��� � ' $ � � $ � ' � � � � � � � (4.5)
69

and the covariance function given �� ��� is
� � ��� ' � ��,� � ����� ��� � � � � �� �
�� � �� �
�� �� � � � � �
� �� � � � � �
�� � � � � �
� �� � � � � �
�� � � � � � � � � �� � � � � � � � � � � �&������� $ � � $ � � $ � � $ � � � � �&� ��� ' $ � � $ � ' � ' $ � � $ � ' � � � � � � � � � � � � � (4.6)
where � � � ��� � ��� � ��� � � �#� � � � � � � � �!� , where �!� ��� ��� � ��� � are � � ��� � ��� � ��� � arranged in increasing
order.
Since � ��� in (2.1) is completely described by ' ) � � & ��( ��� �� , we obtain
� � � ��� � ��� ' )� � & � ( ��� �� � � ���� �� & � � �� � � � ����� �
���� ��
���� � & � & � ��� � � � ������� � � ������� � � � ����� (4.7)
where we have used & �� � & � . The first term
� �� ��� � � � �� �
�� �� � � � � �
� �� � � � � ��� �&� � � ' $ � � $ � ' � � � �� � � � � � � � � � � (4.8)
represents the linear component which includes the signal component and the usual inter-symbol
interference (ISI) due to linear dispersion effects. The second term
� �'�� ��� � � � � � �� �
�� �� � � � � �
� �� �� � � � ��� �&����� ' $ � � $ � ' � � � �� � � � ��� � � � � � (4.9)
represents the nonlinear interference (crosstalk) term which includes interference due to the nonlin-
earity of the detector. Recall ) � is the random phase associated with the � th pulse due to timing
jitter. From (4.6), the intensity noise given the jitter and information bits is
� ��� � � ��� � ��� ' )� � & � ( ��� �� � � �� � � ��
�� �&� ��
�� �,� ��
�� � � �� & � � & � � & � � & � � � � � � � � � ��� � � � � �
� �! � ��� � � � ��� ��� � � ����� � � � � � ��� ��� � ����� (4.10)
where
� �!�� � � � � � � � � � � � � � � � �� �
�� � �� �
�� �� �� � � � � �
� �� �� � � � � �
�� �� � � � � �
� �� �� � � � � �
� � � � � � � � � � � � � � � � � � � � �&������� $ � � $ � � $ � � $ � � � � �&� � � ' $ � � $ � ' � ' $ � � $ � ' � � � � � � � � � � � � � (4.11)
70

Knowing these Volterra kernels � � ��� , � �'� ��� � � , and � � �� � � � � ��� � � � � � , we can (i) optimize the de-
sign, decide on necessary coherence time, pulse-width and symbol period for a given length of fiber
and given a decoder algorithm, (ii) calculate a realistic performance of the existing algorithms, and
(iii) design inverse Volterra kernels necessary to compensate for these effects thus improving the
decoding algorithms. We address (i) and (ii) in Section 4.2 and leave the latter for Chapter 6.
The expected value in (4.7) is still stochastic because of the phase term � � � � � �* � , the phase
difference between different pulses. The expectation of the intensity with respect to ) � , given the
data is given by
� � � ��� � � � ' & ��( ��� �� � � ���� �� & � � � � ��� � ��� (4.12)
The variance or noise introduced due to this phase difference is
� ��� � � � � ��� � ��� ' )� � & � ( ��� �� � � ' & ��( ��� �� � � ���� ��
���� � & � & � � �'�� � ��� ������� � � ����� � � (4.13)
This is the nonlinear noise that appears as the variance of the intensity. This term is shown to be
zero for incoherent light and maximum for coherent light in the next sections.
Using the independent and identically distributed nature of pulse phases, taking the expectation
of (4.10) with respect to the pulse phase, we are left with the terms with ' � � � � � � � � � � � ( and
' � � � � � � � � � � � ( , which give us the mean intensity noise in presence of timing jitter as
� � � � � � � ��� � ��� ' )� � & � ( ��� �� � � ' & � ( ��� �� � � � �
� � � �� �
� ��� �� & � � & � �
� �! � � � � � ����� � � � ������� � � � ������� � � � ����� � �
��� �� & � � �! � � � � � ��� � � � � ��� � � � � ��� � � � ��� (4.14)
We show the effect of phase noise on the linear dispersion by using the signal-to-interference
ratios (SIR) at the detector for a theoretical optical source that can generate pulses of any width
and coherence time. We define the SIR as the ratio of signal energy to interference energy within a
symbol period. Assuming ' &���( ��� �� to be equally likely and independently distributed, taking the
expectation with respect to ' & � ( ��� �� , the expected signal energy in the interval� � ��� ��� for bit &�� in
71

(4.7) is
Signal ��
� � " $� � �� ����� � (4.15)
The expected energy due to dispersion in the interval� � ��� ��� in (4.7) is
Dispersion �
�
�
� � ��� � �� ����� ��� �
" $ � �� ����� ��� (4.16)
The expected energy due to nonlinear interference in the interval� � ��� ��� in absence of jitter in (4.7)
is
Nonlinear interference ��
�� ��
� ���� �� � ��� ����� � � � ��� � � � � (4.17)
The expected energy due to nonlinear noise (i.e., with jitter) in the interval� � ��� ��� in (4.13) is
Nonlinear noise ��
� � ��
���� �� � � �'�� ����� ��� � ����� � � � (4.18)
The expected energy due to intensity noise in the interval� � ��� ��� in (4.10) (without the jitter) is
Intensity noise ��
� � �
� � � �� �
� � � �� �
� � � �� � �! ����� ��� � � � ��� � � � ������� � � � � ��� (4.19)
The expected energy due to intensity noise with jitter in the interval� � ��� ��� in (4.14) is
Intensity noise ��
�
���� �� � �! ��������� � � � � ��� ��� ����� (4.20)
4.1.1 Completely Coherent Light
For completely coherent light, using � � � �in (4.5) and (4.6), we obtain the first two moments as
� � � ��� � � � ���� ����� " � � � �� �
�� �� � � � � �
� �� � � � � � �� � � � � � � � � � � � � � � (4.21)
and� � ��� ' � ��� � ��� � ��� � � � �
, i.e., the covariance function in absence of phase noise is, of course, zero.
Therefore, the expected intensity noise� � � � � ��� � � � ' ) � � & ��( ��� �� � � �
.
Substituting � � � �in (4.8) and (4.9) yields
� � ��� � � � �� �
�� �� � � � � �
� �� � � � � � � � � � � � � � � � � � � � � (4.22)
72

� �'� ��� � � � � � �� �
�� �� � � � � �
� �� �� � � � � � � � � � � � � � � � � � � � (4.23)
The expected intensity in (4.7) was derived for completely coherent light in [21] with no timing
jitter.
4.1.2 Completely Incoherent Light
For completely incoherent light, taking the limit as � ��� " in (4.5) yields
� � � ��� � � � �� � � ��� #" � � � �� �
�� �� � � � � �
� �� � � � � � �� � � � � � � � � � � � � � � ��� � � � � �
� � �� � � � � � � � � � � � � � � � � � � � � (4.24)
We notice that this is a linear convolution of the intensity of the input with the magnitude square
of the impulse response of the fiber to the optical field. For intensity-modulated communica-
tion systems using incoherent light, the input intensity can be written as� ��� � � � � �� ����� � �
� ��� �� & � � ��� � � � , where� ��� is the intensity of the pulse shape, and &�� are again the infor-
mation bits. This gives us
� � � ��� � � � ' & � ( ��� �� � � ���� �� & � �
�� � � � � � � � � � � � � � � (4.25)
We can conclude that the impulse response of the fiber to the optical field is completely different
from the impulse response of the fiber to the intensity, as shown in [21, eq. (12)]. The nonlinear
interference (crosstalk) has disappeared as there is no phase relation between any points for incoher-
ent light, thus the detector nonlinearity does not add nonlinear interference. In the presence of jitter,
the nonlinear noise term does not appear either.
In the limit as � ��� " , we see that (4.11) gives us
� �!�� � � � � � � � ��� � � � � �� �
�� � �� �
�� �� �� � � � � �
� �� �� � � � � �
�� �� � � � � �
� �� �� � � � � �
� � � � � � � � � � � � � � � �� �� � � ��� � ��� � ��� � � �
� � � � � � � � � � � � � ��� � � � � � � � � � � � � (4.26)
73

where� ��� is the magnitude of the input pulse,
�� � � ��� � ��� � ��� � � �
� �!� � � � � ��� � � � where
� � ��� � ��� ���!� � are � � ��� � ��� � ��� � � arranged in increasing order. However, ��� � � � � � � � � � �only if
�!� � � and � ��� � � . Therefore, the intensity noise in (4.14) does not vanish for incoherent light.
4.2 Numerical Results
We assume that the laser generates a Gaussian pulse shape with intensity given by (3.15) with � �
�mW and
��� � � . In this work, numerical results for two different fibers of different lengths are
presented. First, a GVD dominant case, i.e.,�� � � � � psec
�/km, and
�� �
�with a fiber length
of � � � km is considered. Second, operation at the zero-dispersion wavelength, i.e.,�� �
�, and�
� �� � �
psec�/km with a fiber of � � � km, is then analyzed. The length of � � � km for third-order
dispersion dominant case has been chosen to represent a practical situation, within the so called
“dispersion limit” [75] for the given data rate, and the length of � � � km for the GVD dominant case
has been chosen to make the performance of both cases comparable.
Figure 4.1 shows the output intensity pulse shapes when a pulse of width�
psec having different
coherence times is injected into the two fibers under consideration. These plots show that the level of
coherence has a strong effect on the output pulse shapes. For a GVD dominant fiber of length � � � km,
we can see from Figure 4.1(a) that the pulse shape is Gaussian for coherent light ( �� � ��� ���psec).
The pulse shape is non-Gaussian for partially coherent light ( � � �psec), and the dispersion is
over approximately � � pulse-widths. For the almost incoherent case ( � �� � � � �
psec), we can
see that the pulse shape is very non-Gaussian and the dispersion is approximately over � � pulse-
widths. The pulse shape is almost square, with more signal energy in the adjacent slots than the
slot in which the pulse was transmitted. The reason signal coherence has such a strong effect on
dispersion is that as light becomes more incoherent, the bandwidth of the channel described by the
fiber with the coherence function decreases below that of the bandwidth of the impulse response
without coherence function (for coherent light), thus spreading the signal more than the dispersion
74

input pulse
coherence time = 0.005 psec
coherence time = 5 psec
coherence time = 5000 psec
−25 −20 −15 −10 −5 0 5 10 15 20 250
1
2
3
4
5
x 10−4
time/rms pulsewidth
inte
nsity
Length = 2.2 km
(a)
input pulse
coherence time = 0.005 psec
coherence time = 5 psec
coherence time = 5000 psec
−4 −2 0 2 4 6 8 10 12 14 160
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−3
time/rms pulsewidth
inte
nsity
Length = 320 km
(b)
Figure 4.1: Output pulse shapes for different levels of coherence of light for input pulses of�
psecRMS width: (a) GVD dominant case (b) operation at zero-dispersion wavelength, � � .
75

alone would have. We need to understand here that pulse-widths of�
psec can not currently be
generated with incoherent sources having coherence times as small as� � � � �
psec. This waveform is
of theoretical interest only.
As seen in Figure 4.1(b), for operation at the zero-dispersion wavelength with a fiber length of
� � � km, the effect of dispersion is very small for coherent light. For the partially coherent case,
dispersion has increased considerably (over 10 pulse-widths) compared to coherent light, and the
dispersion is even more for almost incoherent light, extending over 15 pulse-widths. Tails become
quite heavy for incoherent light. The energy is transferred into the future bits only and previously
transmitted bits are not affected.
We now illustrate the dispersion as a function of source coherence. We use the RMS pulse-
width for a single pulse � ��� given by (3.20) as a measure of the effects of dispersion. We have
plotted in Figure 4.2 the output RMS pulse-width versus input RMS pulse-width, for various values
of coherence time for the two cases under consideration. We can see that as the coherence time
decreases (light becomes more incoherent), dispersion increases, increasing the output pulse-width.
For coherence time smaller than� � �
psec, we do not see much change in output RMS pulse-width
from those obtained for� � �
psec. Note that pulses below�
psec for the GVD dominant case ( � psec
for operation at zero-dispersion wavelength) experience extreme dispersion, even for coherent light.
Sending pulses of width shorter than�
psec can result in much wider received pulses than if wider
pulses had been transmitted as observed in [3, 28]. The smallest output RMS pulse-width even with
the most coherent light source is obtained when the input pulse is�
psec for the GVD dominant
case and � psec for operation at the zero-dispersion wavelength. Therefore, compared to the GVD
dominant case, we can afford to use smaller pulses for operation at � � . Depending on the coherence
time, the pulse-width for which pulses with minimum width are received changes for the same fiber
length.
This shows that shortening the input pulses even with more coherent light sources may not give
shorter output pulses. As we see in the next section, in addition to not necessarily getting shorter
76

coherence time < 0.1 psec
coherence time = 1.0 psec
coherence time = 10 psec
coherence time = 100 psec
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100
input pulsewidth (psec)
outp
ut p
ulse
wid
th (
psec
)
Length = 2.2 km
(a)
coherence time < 0.1 psec
coherence time = 1.0 psec
coherence time = 10 psec
coherence time = 100 psec
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100
input pulsewidth (psec)
outp
ut p
ulse
wid
th (
psec
)
Length = 320 km
(b)
Figure 4.2: Plot of RMS pulse-widths of output pulses, showing the effect of coherence time ondispersion: (a) GVD dominant case (b) operation at zero-dispersion wavelength, ��� .
77

output pulses, nonlinear interference is added to the output when we use coherent sources.
4.2.1 Communication System Performance
So far we have seen the effect of source coherence on the shape of the single pulse obtained at the
output of the photo-detector and looked at the RMS pulse-width of a single pulse for different input
pulse-widths and different coherence times.
Now we analyze the performance of a communication system transmitting a pulse stream op-
erating with fixed input pulse-width and symbol duration. We have plotted the shapes of the total
received signal and the nonlinear interference from (4.7) showing the effect of pulse separation in
Figure 4.3. For the GVD dominant case (Figure 4.3(a)) and less coherent light, the dispersion (as an-
ticipated) spreads the pulse so severely that we can not distinguish two adjacent pulses; the nonlinear
interference also shows the same spreading but with smaller amplitude. When the coherence time is
larger than the input RMS pulse-width ( �� � � � � psec), the spreading is less severe and the width of
the nonlinear interference is also small but the amplitude of the nonlinear interference is much larger
compared to less coherent light. When we double the pulse separation, the nonlinear interference
decreases drastically for less coherent light, but makes less of a difference for coherent light. This is
because of increased interaction between pulses due to larger coherence times compared to symbol
periods.
For operation at the zero-dispersion wavelength (Figure 4.3(b)), since dispersion is into future
bits only, the effect of dispersion is smaller, but nonlinear interference is much larger for less co-
herent light. We observe more oscillations in the intensity, due to faster variation in phase for
third-order dispersion. For coherent light, since dispersion is very small, pulses do not overlap thus
produce little nonlinear interference compared to the GVD dominant case.
Now we look at quantitative measures of performance of communication systems. Our perfor-
mance measure is the signal-to-interference ratio (SIR) due to dispersion, nonlinear interference and
intensity noise. Our goal is to determine numerically the optimal input pulse-width for which max-
78

−100 0 1000
0.2
0.4
0.6
0.8
1
x 10−3
inten
sity
Ts = 30 psec
−100 0 1000
1
2
3
4
5
6
x 10−4
−100 0 1000
0.5
1
1.5
x 10−6
−100 0 1000
0.2
0.4
0.6
0.8
1
x 10−3
time (in psec)
inten
sity
Ts = 60 psec
−100 0 1000
1
2
3
4
5
6
x 10−4
time (in psec)−100 0 100
0
0.5
1
1.5
2
2.5
x 10−15
time (in psec)
−100 0 1000
0.2
0.4
0.6
0.8
1
x 10−3
−100 0 1000
1
2
3
4
5
6x 10
−5
−100 0 1000
0.2
0.4
0.6
0.8
1
x 10−3
time (in psec)−100 0 100
0
0.2
0.4
0.6
0.8
1
1.2x 10
−6
time (in psec)
Input Nonlinear noise Received Nonlinear noiseReceived
cct = 1 psec t = 128 psec
(a)
−50 0 500
0.2
0.4
0.6
0.8
1
x 10−3
inten
sity
Ts = 30 psec
−50 0 500
1
2
3
4
5
6
x 10−4
−50 0 500
0.2
0.4
0.6
0.8
1x 10
−5
−50 0 500
0.2
0.4
0.6
0.8
1
x 10−3
time (in psec)
inten
sity
Ts = 60 psec
−50 0 500
0.2
0.4
0.6
0.8
1
x 10−3
time (in psec)−50 0 500
0.2
0.4
0.6
0.8
1
x 10−14
time (in psec)
−50 0 500
0.2
0.4
0.6
0.8
1
x 10−3
−50 0 500
0.2
0.4
0.6
0.8
1
1.2x 10
−5
−50 0 500
0.2
0.4
0.6
0.8
1
x 10−3
time (in psec)−50 0 500
1
2
3
4
5
6
x 10−7
time (in psec)
c ct t= 1 psec = 128 psec
ReceivedInput Nonlinear Noise Received Nonlinear Noise
(b)Figure 4.3: Plots of different waveforms of expected received signal (signal and mean nonlinearinterference) and ����� ����� � ����� showing the effect of pulse separation on the nonlinear interference:(a) GVD dominant case (b) operation at zero-dispersion wavelength.
79

imum SIR is obtained for a given coherence time and data rate. To this end, we have defined six
parameters. The signal-to-interference ratio (SIR) due to dispersion is the ratio of the expected sig-
nal energy in the integration interval of interest to the mean square interference caused by dispersion,
(using (4.15) and (4.16)),
� ��� � ���� " $� � �� ����� �
�� � � ��� � �� ����� ��� � "%$ � �� ����� � (4.27)
The SIR due to nonlinear interference is the ratio of the expected signal energy in the integration
interval of interest to the mean square nonlinear interference of (4.17),
� ��� �� ���� "%$� � �� ����� �
�
�� �� �
� ��� �� � �'� ����� � � ����� � � � (4.28)
The SIR due to nonlinear noise (in the presence of jitter) is the ratio of the expected signal energy in
the integration interval of interest to the mean nonlinear noise of (4.18),
� ��� ������� "%$� � �� ����� �
�
�� �� � ��� �� � � ��� ����� ��� � ����� � � � (4.29)
The total SIR due to dispersion and nonlinear interference is the ratio of the expected signal energy
in the integration interval of interest to the energy due to dispersion of (4.16) and the mean square
nonlinear interference of (4.17),
� ��� $ ���� " $� � �� ��� � �
�� � � ��� � �� ��� � � � � " $ � �� ��� � � � �
�� �� �
� ��� �� � �'� ����� ��� ����� � � � (4.30)
The SIR (defined similarly) due to intensity noise introduced by the phase noise in absence of jitter,
given in (4.19) is
� ��� � ���� " $� � �� ��� � �
� �� � �
� � � ��� �� � � �� � � � �� � �! ����� � � � ����� � � � ����� � % ����� � � (4.31)
Lastly, the SIR due to intensity noise introduced by the phase noise in presence of jitter given in
(4.20) is
� ��� � � ���� "%$� � �� ����� ��
�� �� � ��� �� � � ��������� ��� � ����� ��� ������� � (4.32)
80

For computational reasons, we integrate the interference caused over ten adjacent symbols, five on
either side of the symbol of interest. This is consistent with the largest fiber dispersion and coherence
time considered. In our simulations, we found that taking ten such symbols is accurate within an
error of�������
, in the worst case.
Figure 4.4 shows the six SIR measures as the source coherence varies. The system is assumed to
use an input RMS pulse-width of�
psec with a symbol period of � � psec. As light becomes more and
more coherent, dispersion decreases, and nonlinear interference increases. The SIR � for incoherent
light is smaller than�
dB. For incoherent light, nonlinear interference is very small, and as light be-
comes more and more coherent, (and dispersion decreases) nonlinear interference increases rapidly,
then as the coherence time exceeds the pulse-width (i.e., when � �� � � � � ��), interaction between
pulses does not change too much, and nonlinear interference changes very little with increasing co-
herence time. SIR �� is slightly smaller than SIR �� for smaller coherence times. We have indicated
the asymptotes by using�
’s, wherever the SIR’s are finite. The asymptotes calculated using the
formulae in Sections 4.1.1 and 4.1.2 conform quite well with the curves calculated for partially co-
herent light, confirming the limiting behavior of the light for completely coherent and completely
incoherent light. For completely incoherent light, the intensity noise is considerably smaller than the
interference due to dispersion and considerably larger than nonlinear interference or noise. How-
ever, as light becomes more coherent, the intensity noise decreases and becomes much smaller than
both the interference due to dispersion and nonlinear interference or noise. The intensity noise is
maximum for the completely incoherent case and is only of theoretical interest, as we can not gen-
erate pulses with pulse-widths as small as�
psec with very short coherence times. Timing jitter
increases intensity noise considerably. For operation at the zero-dispersion wavelength � � , Figure
4.4 (b) show the same trend as the GVD dominant case, except that the SIR � ’s are considerably
higher and the SIR �� or SIR �� remains fairly constant across values of �� .Figure 4.5 shows the dependence of SIR � and SIR �� on coherence time for a pulse-width of
�psec and for different symbol periods. The SIR �� is more affected by the increasing symbol period
81

SIR due to dispersion SIR due to nonlinear interference total SIR without jitter SIR due to nonlinear noise SIR due to intensity noise SIR due to intensity noise with jitter
−1 −0.5 0 0.5 1 1.5
0
10
20
30
40
50
60
70
log(coherence time/pulsewidth)
10 lo
g(si
gnal
−to
−in
terf
eren
ce r
atio
)
Length = 2.2 km
(a)
SIR due to dispersion
SIR due to nonlinear interference
total SIR without jitter
SIR due to nonlinear noise
SIR due to intensity noise
SIR due to intensity noise with jitter
−1 −0.5 0 0.5 1 1.50
10
20
30
40
50
60
70
log(coherence time/pulsewidth)
10 lo
g(si
gnal
−to−
inte
rfer
ence
rat
io)
Length = 320 km
(b)
Figure 4.4: Plot of SIR � , SIR ��� , SIR ��� , SIR � , and SIR � � showing the effect of coherence timeand timing jitter for a fixed symbol period of � � psec and a pulse-width of
�psec,
�’s indicate the
asymptotic values, � � �and �! � " , calculated from formulae in Sections 4.1.1 and 4.1.2: (a)
GVD dominant case, (b) operation at zero-dispersion wavelength, ��� .82

symbol period = 30 psecsymbol period = 40 psecsymbol period = 50 psec
−1 −0.5 0 0.5 1 1.5−20
0
20
40
60
80
100
120
140
log(coherence time/pulsewidth)
10 lo
g(si
gnal
−to−
inte
rfere
nce
ratio
)
Length = 2.2 km
(a)
symbol period = 30 psec
symbol period = 40 psec
symbol period = 50 psec
0 0.5 1 1.50
10
20
30
40
50
60
70
80
90
100
log(coherence time/pulsewidth)
10 lo
g(si
gnal
−to−
inte
rfere
nce
ratio
)
Length = 320 km
(b)
Figure 4.5: Plot of SIR � (shown with ’o’s), and SIR ��� , showing the effect of coherence time foran input RMS pulse-width of
�psec and different symbol periods for (a) GVD dominant case (b)
operation at zero-dispersion wavelength.
83

than the SIR � . Since the separation between pulses increases with increasing the symbol period,
nonlinear interaction between pulses decreases thus giving smaller values for nonlinear interference.
For smaller symbol periods, the symbol overlap makes the SIR ��� exceed the SIR � even for �! � � as
low as�. The coherence time at which nonlinear interference exceeds the dispersion increases with
increasing symbol periods. For operation at the zero-dispersion wavelength, the behavior is similar
but with larger SIR’s and relatively higher nonlinear interference as compared to dispersion.
Figure 4.6 shows the variation with input pulse-width of the SIR � , SIR �� and SIR $ for differ-
ent coherence times for the GVD dominant case. Our aim is to determine the pulse-width for
which maximum SIR is achieved, and whether such optimal pulse-width depends on the coherence
time. From Figure 4.6(a), we see that the nonlinear interference increases drastically with increasing
pulse-width for less coherent light. As light becomes more and more coherent, the nonlinear inter-
ference increases and its dependence on pulse-width decreases. For less coherent light, pulse-width
makes very little difference for SIR � ; however, as light becomes more coherent dispersion decreases
and its dependence on input pulse-width increases. The maximum SIR � is achieved for a � � � psec
input pulse-width for all coherence times. Note that this is different from that predicted by disper-
sion alone in Figure 4.2. Here we are considering the effects of inter-symbol interference and not
simply RMS pulse-width. The pulse-width for which maximum SIR �� is achieved seems to increase
slightly with coherence time. This effect cannot be used in practice since to generate short pulses
we require highly coherent sources.
Figure 4.6(b) shows that the SIR $ changes with pulse-width for different coherence times, reach-
ing a maximum for coherent light when pulse-widths are large. As pulse-width decreases below
� psec, partially coherent light seems to do better than the coherent light.
Figure 4.7(a) shows the variation of optimum input RMS pulse-width (input pulse-width for
which maximum SIR is achieved) as we vary the coherence time for different symbol periods. As
the symbol period increases, the choice of coherence time increases the optimum pulse-width dras-
tically, and the optimum pulse-width depends more and more on coherence time. For smaller coher-
84

coherence time = 2 psec
coherence time = 8 psec
coherence time = 32 psec
coherence time = 128 psec
2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
40
45
50
rms pulsewidth (psec)
10 lo
g(si
gnal
−to−
inte
rfere
nce
ratio
)
Length = 2.2 km
(a)
coherence time = 2 psec
coherence time = 8 psec
coherence time = 32 psec
coherence time = 128 psec
2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16
18
20
rms pulsewidth (psec)
10 lo
g(si
gnal
−to−
inte
rfere
nce
ratio
)
Length = 2.2 km
(b)
Figure 4.6: Plot of the (a) SIR � (shown with ‘o’s) and SIR ��� , and (b) SIR $ showing the effect ofcoherence time for a symbol period of � � psec for different pulse-widths for a GVD dominant case.
85

symbol period = 30 psec
symbol period = 35 psec
symbol period = 40 psec
symbol period = 45 psec
symbol period = 50 psec
0 0.5 1 1.5 2 2.54
4.5
5
5.5
6
6.5
7
7.5
8
8.5
9
log(coherence time (in psec))
optim
al in
put r
ms
puls
ewid
th
Length = 2.2 km
(a)
symbol period = 30 psec
symbol period = 35 psec
symbol period = 40 psec
symbol period = 45 psec
symbol period = 50 psec
0 0.5 1 1.5 2 2.50
5
10
15
20
25
30
35
40
45
log(coherence time (in psec))
10 lo
g(m
axim
um s
igna
l−to
−int
erfe
renc
e ra
tio)
Length = 2.2 km
(b)
Figure 4.7: Plot of the (a) optimal input pulse-widths and (b) SIR $ ’s for optimal pulse-width fordifferent symbol periods for a GVD dominant case.
86

ence times, dispersion dominates, therefore the optimal pulse-width is larger (dispersion is smaller
for larger pulse-widths); for larger coherence times, nonlinear interference dominates and the pulse
overlap has to be reduced, thus we need to use larger pulses (to reduce dispersion). Figure 4.7 (b)
shows that all SIR’s for optimal pulse-widths show almost the same behavior, increasing with coher-
ence times initially, then increasing rapidly, and then remaining almost constant for larger coherence
times. For smaller symbol periods, we see a decrease in SIR for large pulse-widths, and from the
trend we can conclude that for a given symbol period, we can find an optimum coherence time
and pulse-width for which SIR achieves a maximum. The SIR’s of course increase with increasing
symbol period.
4.3 Summarized Observations
Volterra kernels describing the effect of phase noise on the intensity of the light received at the
photo-detector are derived. The effect of coherence time on dispersion, the addition of nonlinear
interference/noise and intensity noise are presented. It is shown that lack of source coherence intro-
duces a phenomenal increase in dispersive effects in fiber-optic systems using direct-detection. The
pulse shapes are quite different for incoherent light as compared to coherent light. Low coherence
increases the dispersive effects drastically making the pulses indistinguishable from adjacent pulses
making the decoding at the receiver impossible. However, high coherence introduces excessive non-
linear interference which can become comparable or sometimes even stronger than the interference
due to dispersion even for moderately small coherence times � � ��� � � . The second moment of the
received intensity gives rise to what we call “intensity noise”, which can become considerable for
smaller coherence times. Timing jitter can cause a measurable increase in the nonlinear interference
and intensity noise.
We conclude that the use of smaller input pulse-widths does not necessarily mean better perfor-
mance. There is an optimal input pulse-width for which the output pulse-width is minimum; there
87

is also an optimal input pulse-width (possibly different) for which the SIR is maximum, and such
optimal input pulse-widths depend on the choice of coherence time. As we develop highly coherent
ultrashort pulses, we are introducing nonlinear interference/noise, with almost no reduction in the
RMS pulse-widths of pulses received or increase in the SIR at the receiver.
This work provides tools to choose an optimal input pulse-width for a given source coherence
time and symbol period (data rate). The Volterra kernels derived here can also be used to design
filters either in the optical domain or the electronic domain to reduce the nonlinear interference/noise
and intensity noise.
88

Chapter 5
System Design
A new methodology for designing fiber amplifier based optical communication systems is presented
in this chapter. We derive the overall Volterra series transfer function of the system including linear
dispersion, fiber nonlinearities, amplified spontaneous emission (ASE) noise from the fiber ampli-
fiers, and the square-law nature of the direct detection (DD) system. Since analytical expressions for
the probability of error are difficult to derive for the complex systems being used, we derive analyti-
cal expressions for an upper bound on probability of error for integrate-and-threshold detection at the
receiver. Using this bound as a performance criterion, we determine the optimal dispersion param-
eters of the fiber segments required to minimize the effects of linear dispersion, fiber nonlinearities
and ASE noise from the amplifiers. We study the dependence of optimal dispersion parameters on
the average power levels in the fiber by varying the peak input power levels and the amplifier gains.
Analytical expressions give us the freedom to choose system parameters in a practical manner, while
providing optimum system performance. Using a simple system as an example, we demonstrate the
power of the Volterra series approach in designing optimal optical communication systems. The
analysis and the design procedure presented in this work can be extended to the design of more
complex wavelength division multiplexed (WDM) systems.
In Chapter 3, we proposed a VSTF approach for modeling the interaction of linear dispersion
and fiber nonlinearities in an optical fiber. We showed that the Volterra series approach can pro-
vide an accurate description of the effects of linear dispersion and fiber nonlinearities. For practical
89

power levels (on the order of�
mW), we showed that a third-order approximation to the VSTF yields
results comparable to the split-step Fourier method. In addition to providing an accurate descrip-
tion of the behavior of an optical fiber, the VSTF also provides an analytical tool to design modern
systems. In this chapter, we offer an example of the potential of this analytical method to design
complex optical fiber systems. We determine the overall VSTF of a fiber system including fiber
and amplifier parameters in an analytical form. Using an approximation of this transfer function,
we determine optimal dispersion parameters to minimize linear dispersion, fiber nonlinearities, and
ASE noise. These approximations can be removed depending on the accuracy required at the cost of
additional computations. The optimality criterion desired is the probability of error for which ana-
lytical expressions are difficult to derive due to the complex nonlinear receiver statistics. Therefore,
we use an analytical upper bound on the probability of error, namely the modified Chernoff bound,
as a performance criterion. The derivation of this bound depends on analytical expressions for the
output optical field provided by the VSTF method.
The most logical performance measure in the design of digital optical communication systems
is the probability of error. Unfortunately, analytical expressions for the probability of error are in-
tractable. Even though the Volterra series approach provides an analytical expression for the optical
field incident on the photo-detector, the probabilistic models used in the current literature for the
photo-detection process are inadequate for modeling practical situations. Therefore, we determine
bounds on error probability at the receiver, and then determine the optimal dispersion parameters
that minimize this bound.
In Section 5.1, we present the optical communication system model used in this chapter and
derive the overall VSTF. In Section 5.2, we derive the statistics of the received optical field. We
introduce the modified Chernoff bound in Section 5.3 and derive the required moment generating
function (MGF) of the output current from the photo-detector including linear dispersion, fiber non-
linearities, the behavior of the amplifiers and thermal and shot noise processes at the receiver. The
use of these analytical expressions in system design is demonstrated on a very simple system in Sec-
90

tion 5.4. Optimal system parameters that minimize the probability of error for this simple system
are determined, illustrating how our method could be used for more complex system design. The
dependence of the optimal dispersion parameters on power levels in the fiber are demonstrated by
varying the input peak power and amplifier gains.
5.1 Transfer Function of the System
Currently most optical communication system design methods rely on analytical expressions avail-
able for single-pulse propagation [20, 46, 66]; however, the design is verified using a stream of
pulses, and fine tuning of the system parameters is done heuristically [51, 52, 56]. In this work, we
start with multi-pulse propagation and design the system including multiple pulse interactions. The
complex envelope of the input field is given by
� � ��� � � � �
��� �� & � � ��� ��� (5.1)
where � is the peak power of the input pulse, & � ' � � � ( are the transmitted bits, � ��� ��� �
� � ��� � ��� is the basic pulse shape used to transmit the � th bit, and � � is the symbol period.
There has been a few attempts to optimize the performance of amplified based optical communi-
cation systems. The problem of determining the optimum location of the amplifier (when only one
amplifier is used) in a link was considered by Fellegara [66]; however, linear dispersion and fiber
nonlinearities, which play a dominant role in determining the amount of interference and noise at
the receiver, were ignored. In this chapter, we compare the relative performance of different kinds
of amplifier chains used in practice, including the effects of linear dispersion, fiber nonlinearities,
and ASE noise. We assume a system with � sections of fiber with Erbium doped fiber amplifiers
(EDFAs) placed between each section as shown in Figure 5.1. We consider four different amplifier
chains mentioned in Section 2.2.4 and shown in Figure 5.1, namely, Type A, B, C, and AC amplifier
chains. We first derive the transfer function of a general system which we then use to derive the
transfer functions of the different configurations in Figure 5.1. A block diagram representation of
91

Receiver
� � � �� � ����
� � ����
� � ����
� � ����80 km 80 km 80 km 80 km
Laser EDFAEDFA EDFA EDFA
(a) Type A amplifier chain
� � ����
� � � ���
� � ����
� � ����� � � � �64 km 64 km 64 km 64 km 64 km
Laser ReceiverEDFAEDFA EDFA EDFA
(b) Type B amplifier chain
106 km 106 km 107 km� � �Receiver
� � ����
� � � ���
� � ����
� � ����Laser EDFAEDFA EDFA EDFA
(c) Type AC amplifier chain
� � � �� � ����
� � � ���
� � ����
� � ����Laser EDFAEDFA EDFA EDFA Receiver
80 km 80 km 80 km 80 km
(d) Type C amplifier chain
Figure 5.1: Typical communication systems used to demonstrate the design procedure.
92

� �� � � � �
� ��� �� - �
� � ��
� � ��
� � ��
� � ��� - � � � - �
Figure 5.2: Block Diagram of the cascade of % th fiber amplifier and % th fiber segment.
the cascade of one amplifier and one fiber segment is shown in Figure 5.2 for the % th fiber amplifier
and % th fiber segment.
For low input power levels, the fiber amplifier can be modeled as a linear filter� � � - � ��
� � � - � , where � � � - � is the frequency dependent gain of the % th amplifier in the amplifier chain.
The ASE noise from the % th amplifier, ��� ��� , can be assumed to be circularly symmetric complex
Gaussian distributed with power spectral density � � � - � � ������ � � � - � � �
�� W/Hz, where �
is the optical frequency of operation,�
is Planck’s constant, and � ��� is the spontaneous emission
parameter, which is a measure of the degree of inversion achieved in the amplifier [27].
We define� � - � as the Fourier transform of the complex envelope
� � ��� of the input to the
% � � � th fiber segment (the input field to the first segment is� � ��� , defined in (5.1)). The transfer
function of the % th fiber segment of length � � can be written as
� � - � � � � �� - � � � ��� - ����� �� �� � � � ��� � - � (5.2)
where� � �� - � � � �
��� � � � � �
� � � ���� � � �
��� �� � � �� �
(5.3)
is the linear transfer function and the second term in (5.2) accounts for the third order fiber nonlinear-
ity. The function � � �� - � is the linear fiber kernel where � � � and
� � �� � � � �
��� � are the attenuation
and dispersion constants of the fiber segment, respectively, � is the center wavelength used,�
is the
speed of light, and � is the usual dispersion used in current optical communication literature. In the
above model, we have ignored the effect of the third-order dispersion (dispersion slope), as its effect
is negligible for lengths much smaller than� � � � � � km.
93

The nonlinear functional � � �� � - � is defined as
� �� �� � � � - � � � � � � �� - � ��- � ��- � - � ��- � � � - � � � � - � � � - � - � ��- � � � - � � - � � (5.4)
where the third-order Volterra kernel is given by (3.10), for which we are using the approximation,
� � �� - � ��- � ��- � � � ��� �#� � � ��� � � � � � � � � � ��� � � �,� � � ��� � � ���
����� � � � � �� - � � - � � - � � - � � � �'��� � ����� � � � �'� � ���� ���
(5.5)
where ������ � � � � ��� � � � � � is the effective length of the % th fiber segment. The approximation to
� � �� in (5.5) includes only terms linear in
� � �� ; in our simulations, we included up to cubic terms,
omitted from (5.5) for brevity. The approximation in (5.5) also neglects the effects of higher-order
nonlinear coefficients, � � , � � , and � � .The expression in (5.2) is a third-order approximation to the VSTF of the optical fiber. The
approximation error incurred in ignoring the higher-order Volterra kernels can be easily shown to
be order������ �
� � �� � � , where �
� �� � ���� � � � �� � is the nonlinear length associated with the SPM
constant � � �� of the % th fiber segment, and � is the peak output power of the laser. Since this term is
about� � ��
of the power contributed by the linear term of the output field for typical power levels of�
mW, we can safely ignore the higher-order kernels. In certain cases when the system parameters
used result in high power levels in the fiber, we may have to include fifth order kernels as discussed
in Chapter 3.
As shown in Chapter 3, the Volterra series model provides an analytical description of the inter-
action of linear dispersion and fiber nonlinearities in a single segment of optical fiber. When two
systems are cascaded, we obtain an equivalent Volterra expansion for the combined system in terms
of the VSTFs of the two sub-systems. The order of nonlinearity of the concatenated system is the
sum of the orders of nonlinearities of the sub-systems. In our case, we ignore the higher-order terms
introduced by cascading the subsystems and use only the third-order approximation of the VSTF of
the overall system.
When we include the linear transfer function and ASE noise of the fiber amplifiers, (5.2) yields
94

a recursive expression for� � - � in terms of
� � ��� - � ,� �� - � � � � �
� - � � � � - � � � ��� - ��� � � �� - ��� �� - ��� � �� �� � � � � � � ��� � � � - � (5.6)
Evaluating the recursion yields (ignoring the terms of nonlinearity higher than three) the output field
for a cascade of � fiber segments as
� � - � ��� � � � - � � �' - � � ��� � � �
� � � � � - � � � �� - ��� � - �
���� � � �
� � � � � - � � �� �� � � � � � � � � ��� � � � � � � ���!� � �
�!� � � � ��� � � �� � � � - � (5.7)
where
� � � � - � ����� ���� � � %���� �
� �� - � � ���� - � �
�� � � � � - ��� � � %���� � �
�� � � � � � � �� % � (5.8)
To simplify notation, we denote � � � � � - � ����!� � �
�!� - � as the total gain due to fiber amplifiers in
the � th to % th segments. The total loss and total accumulated dispersion parameter from the � th to
% th fiber segments are � � � %�� � � ��� ��� � � � and � � � � �
� �
���!� �
� �!�� �� , respectively. It is easily shown
that the error incurred in ignoring the nonlinear terms of order higher than three for the concatenated
system is order�� �� � � � ���� �
� � �� � � , where � is the number of segments in the link. For a link
with distributed amplification, where the amplification exactly cancels the attenuation of the fiber
segments, the error is the ratio of the total effective length of the fiber and the nonlinear interaction
length of the fiber segments,� � � �������� � � .
5.2 Receiver Statistics
Since the received signal depends on the ASE noise terms � �� - � , it is stochastic in nature. In order
to develop accurate performance measures, we must first understand the optical field statistically.
Analytical expressions for the statistics of the optical signal at the photo-detector are required to
derive the modified Chernoff bound (MCB) on the error probability developed in Section 5.3.
95

From (5.7), the output field� � ��� at the end of � sections (incident on the photo-detector) is a
Gaussian process with mean,
� ��� � � � � � ����� � � � �
��� �� & � � � ���� ��� ���� ���� ��� � �� ���� ���
� � � � � �
��� �� �
�%� �� �
� � �� & � &� & � � � � � � � �� ��� (5.9)
and covariance function
� � ��� � � � � � � � ��� � � �� ��� � � ����� �� �
� � ��
��� � � � � � �
� � � - � � � � � � �� - � � � � � � - ��� � �,�� $ � � � � - � � � � � � ��� (5.10)
where the nonlinear terms of order greater than three have been ignored in the mean and all nonlinear
terms are ignored in the expression for covariance.
Volterra kernels are expressed in the frequency domain, whereas the field statistics are best ex-
pressed in the time-domain. Therefore, we provide expressions for various terms in the output field
in the frequency domain, then take the Fourier transform to get the expressions in the time-domain.
In all cases we use the argument - � or ��� to denote the frequency or time domain, respectively.
The linear part of the output field in the frequency domain at the receiver due to the � th input
pulse is
� ���� - � � � � � � - �� ��� - � � � �
� � � �'� � � � � � � � � � (5.11)
and the nonlinear interaction of different pulses is given by
� � � � � � �� - � �
��� � � �
� � � � � - � � � � � �� - � ��- � ��- � - � � - � ��� � � - � ��� � � � - � ��� � � - � - � � - � �
� ��� - � �� �#� � - � ��� � � - � - � � - � ��� - � � - � � � ��� � � � � � �'� � � � � � � � � � (5.12)
where � � � - � � � � � - ��� � � � ��� - � . The nonlinear interaction between the information signal and
the ASE noise is included via the noise kernels, given by
�� ���� - � ���� � � �
� � � � � - � �� � � � � - ��� � � � �� - � � � � � � � � �
� � � � ��- � �� � � � ��� � (5.13)
96

�� ���� - � �
��� � � �
� � � � � - � � � � �� � � � � � - � � � �� � � � � � � � � - � �� � � � � � � � (5.14)
where
�� � � � � - � � � � � - � � � � � ��� - �� ��� - � � (5.15)
�� � � - � � � � � � - � � � ���%� � � � �#� � � � ��� - ��� � � � �#�
� - � � � � �#� - � (5.16)
�� � � - � � � � � � - ��� � ���#� �
� � �#� � � � ��� - ��� � � � �#�� - ��� � � �#� - � (5.17)
are the linearly filtered signal and the filtered power spectral density of the noise at the % th fiber
segment. Notice that the noise term �� ���� - � in (5.13) corresponds to the CPM from the ASE noise
used in current literature and the noise term�� ���� - � corresponds to the FWM between the signal
and the ASE noise. We can evaluate� ���� - � and �� ���� - � accurately, whereas for analytical ease,
we use a third-order approximation of� � � � � � �� - � and
�� ���� - � , i.e., all terms and cross-products of� � �
� ��% � � � � � � � � � � , of powers higher than three are ignored.
In practice, four-wave mixing (FWM) between the ASE noise and the signal is said to introduce
modulation instability (MI). Typically, in the derivation of the parametric gain due to modulation
instability [20], only the cross-phase term due to the intensity of the noise term is included. From
(5.13) and (5.14), we can see that in our case only the cross-phase modulation (CPM) term con-
tributes to the mean of the output signal. The FWM term should appear in the covariance of the
output signal; however, we have ignored that term as it is expected to be negligible compared to
the variance of the ASE noise. We would have to include FWM in the covariance term to see how
the modulation instability theory available in the literature fits our model. Nevertheless, the mean
of the output signal contains two signal-ASE interference terms given by (5.13) and (5.14), which
shows that the choice of dispersion parameters does affect the nonlinear interaction of signal and
ASE noise, and consequently the noise statistics at the receiver.
97

5.3 Modified Chernoff Bound (MCB)
The current methods of analysis do not provide analytical closed-form performance expressions
suitable for system optimization. They are typically based on simplified models, and system pa-
rameters are varied in a heuristic fashion to get the best performance from the system [56, 51, 52].
To design better systems, analytical methods for studying the combined effects of dispersion, fiber
nonlinearities, MI, ASE noise, and the detector (square-law) nonlinearities are required.
We use the MCB [54, 76] as a measure of performance of the communication system. The
Chernoff bound (CB) provides a tight upper bound for the probability of error useful when the
computation of the probability of error is not tractable. This bound takes into account the shot
noise, thermal noise, and other interference terms due to linear dispersion and fiber nonlinearities.
In addition, due to the inclusion of the ASE noise, the beat terms between the ASE noise and signal
are implicitly included in the MGF description. The modified Chernoff bound (MCB) is tighter
than Chernoff bound when the system has significant thermal noise. For a���
Gbps systems, thermal
noise is significant due to the requirement for small rise times at the receiver, so the MCB provides
a tighter bound than the CB.
Ribeiro et. al. [54] have advocated the use of tight bounds on the probability of error. The MGF
of the output current was derived, and used to evaluate the performance of an EDFA pre-amplified
receiver. The mean and variance of the Gaussian approximation were derived and were shown to
be the same as those derived from semi-classical analysis [27, 66, 46]. The effect of thermal noise,
the photo-detector response, and ISI was included in the description of the error bounds. The error
bounds such as Chernoff bounds and saddle-point approximation were shown to be tighter than the
Gaussian approximation, i.e., receiver�
. However, the derivation in [54] indirectly appeals to the
central limit theorem (which implicitly means deriving the Gaussian model). Moreover, by initially
assuming that the observation interval is greater than the reciprocal of the optical bandwidth and
allowing it to tend to zero, the model assumes an infinite optical bandwidth, which is not very
98

practical. In this chapter, we derive a more accurate MGF for the output current at the photo-
detector, including the spectral distribution of the ASE noise, which provides a more realistic bound
on the probability of error. The MGF derived in this chapter takes into account the effect of linear
dispersion and fiber nonlinearities on the spectral distribution of ASE noise and takes into account
the effect of finite optical bandwidth at the receiver (either due to intentional filtering or photo-
detector response characteristics).
We assume direct-detection with integrate-and-threshold detector to be used for extracting the
information from the received signal, with no additional electronic signal processing. The decision
statistic, � is the current produced by the optical signal� � ��� integrated over the time interval� ����� � � ��� � � ��� . Without loss of generality, we consider detecting bit & � &'� , i.e., the bit transmitted
over the time interval of interest � � ����� � � ��� � � ��� . The MCB is given by [76]
� � � � � ���
��� � ����� � � � � �$��� � �
� � ����� $�� �� ' � � � �� �� ' � � � �
�� � (5.18)
where � �$�� is the variance of the thermal noise and� ' � � � is the MGF of the decision statistic when
& is the bit transmitted in the interval of interest.
To derive the expressions for� ' � � � for &�� � � � , we expand the received optical signal using
a Karhunen-Loeve series [21, 54]. This allows us to derive statistics of each of the terms in the
series and thereby obtain the MGF of the output current at the receiver. For � � much greater than
the width of the covariance function� � � � , i.e., for large bandwidth noise spectrum and for large
optical bandwidth compared to the data rate, the eigenfunctions of the Karhunen-Loeve expansion
of the incident signal are complex exponentials [21]
� �! ��� ��
� � �� �,� � $ � - � � ���
����
(5.19)
and the corresponding eigenvalues are given by
� � � � � - � � ���� � � � � � �
� � � - � � � � � � � �� - � � � � � � � - � � (5.20)
99

Typically � � is the symbol period of interest and the width of� � � � is smaller than � � due to the
large amplifier bandwidth and large optical bandwidth used at the receivers.
We find the MGF given the transmitted symbols, & � ' &�� � � �� � � �� � � � � � � � ( , and & � &�� , using
the method of conditioning [21], which gives
�� ' � � � � � � � ��!� �
� � � � � � ��� � � � �� � � � � � � � �
� � � � � � � (5.21)
where� � � � � � � � � � � . The responsivity of the photo-detector is given by � � ���� , where
�is
the quantum efficiency of the detector,�
is Planck’s constant, � is the optical frequency at which the
signal is being transmitted, and � ���� "%$��� , where � is the optical bandwidth at the receiver. The
signal eigenvalues are
� � ��
��� �" $ � �� " $ � � � ����� ��� � $ � � � &
� � �� �!�
� � � �!�� � � �!�
� � � � � � � � � � � � �!�
� ��
���� �� � �� � & �
� � �� � � �!�
� � � � � �!�� � � � � �!�
� � � � � � � � � � � � �!�
� �
� & � �,�� � �
��� �� � �� � & ��� ���� (5.22)
where � � � �� �
�" $ � "%$���
� "%$�� � � ���� ����� ��� � $ � � corresponds to the linear portion of the output field for bit
& � , and similarly � � � � ��� �!�� �
�"%$ � " $ ��
� " $ � � � � � � � � �� ����� �,� � $ � � corresponds to nonlinear portion of the out-
put field due the interaction between pulses &�� , &� , and & � . � � � � �� and
� � � �!�� are similarly defined.
Typically, the nonlinear interaction of a pulse with itself dominates all other contributions from the
nonlinear interaction between three different pulses; therefore, we have assumed in (5.22) that only
� � � � � � �!�� �� �
� � � �� � � � � � � � � � contributes to the output field. Notice that we do get beat terms
between different pulses due to the squaring operation; however, this is a property of the photo-
detection process, rather than the behavior of the fiber. Now taking the expectation with respect to
& , yields
� ' � � � ��� ��!� �
�
� � � � � � �
�������
�� � & ��!� �
� �,�� � � �� � � � � � �
� ��
100

�� �� �
�
�
�� � � � ���� �� � � �� �
�� �������
�� � & ��!� �
� � � ���� � � �� � � � � � �
� �� � � ���
�� � �� � �
� � � � � �� � � �� � � � � � �
� ���� � �� (5.23)
where� �,�� � � � �,�� � � is the
�th eigenvalue of the signal energy received due to the pulse corre-
sponding to bit & � & � in the interval� ��� � � � ��� � � ��� , � � � ���� � �
� � � � �,�� � ����� � � � ���� � � and� � � � � �� � � ����
� � � � �� represent the ISI due to the both linear dispersion and fiber nonlinearities.
5.4 Design Example
We demonstrate the design procedure to optimize the MCB for a simple system. More complex
systems can be designed easily as an extension to the analysis in this section.
The optimization can be carried out to get optimal parameters of any component in the system. In
this section, we concentrate on determining the optimal dispersion parameters� � �� � % � � � � � � � � �(�
of the fiber segments. Such optimum dispersion parameters can be obtained by solving the system
of nonlinear equations, � � � � � � � �� � (5.24)� � � � � � � � �
��
� � % � � � � � � � � � � �(5.25)
Substituting the MGF into the MCB and in (5.24) and (5.25), analytical expressions can be obtained
and the MCB can be numerically minimized. introduced in Section 2.2.4 and determine the relative
advantages of different configurations in reducing fiber nonlinearities and ASE noise at the receiver.
To keep the presentation simple, we make the following assumptions:
1. We use the input pulse shape � ��� shown in Figure 5.3.
2. All segment lengths and amplifier gains in a given configuration are equal for a total link
length of � � � km. Exactly four amplifiers are used in each case. All amplifier configurations
use a receiver with the same sensitivity.
101

−200 −150 −100 −50 0 50 100 150 2000
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Time in psec.
Pow
er in
mW
Figure 5.3: Input pulse shape used. The input pulse corresponding to & � is shown with a solid lineto stress that this is the bit of interest.
102

3. The amplifier gains are independent of frequency. The ASE noise spectrum is white within
the optical amplifier bandwidth as well as the optical bandwidth at the receiver, so that we can
use � � � � � � � - ��� � % � � � � � � � � . For simplicity, we assume that the gains of the amplifiers
are equal i.e., � � � � � � � % . Therefore,
� � � � � � � � � ���� � � �
� � � � ����� � � � � � � � ��� � � � � � � � � (5.26)
is independent of�. The coupling losses to the fiber amplifier are assumed to be absorbed in
the amplifier gain, and the gain given by � should be understood as the total amplifier gain
less the coupling losses.
4. The saturation properties of the fiber amplifiers are ignored, i.e., it is assumed that the amplifier
gains can be varied without saturation. In most cases in the numerical results presented, the
input power is lower than the typical input saturation powers of � �dBm; therefore, except for
very high amplifier gains, the results should be accurate.
5. Typically in manufacturing fibers, dispersion parameters are tailored by varying the effective
cross-sectional area of the fiber. Therefore, the attenuation constant � � and nonlinearity pa-
rameter � � also change accordingly, which can be accounted for in the model. In this study,
for simplicity, we ignore this dependence, and assume that the attenuation constant and non-
linearity parameter do not depend on the dispersion.
We assume the symbol rate to be� � � ���
Gbps, i.e., the symbol period is��� �
psec. For the integrate-
and-threshold receiver assumed, the optical bandwidth is � �� � � � � �
GHz for � � � . We
assume the electrical bandwidth to be at least twice the symbol rate (as per the Nyquist criterion) of
��� � �� � � � � GHz. The load resistance
� � is determined by the rise time of the detector, which
is�����
� � � � � � , with the capacitance of the photo-diode at�
pF, giving a thermal noise variance of
� �$�� � �� " � � �� � � � � ��� ��� �
A�, where � is the temperature in Kelvin.
103

We assume that some parameters, like attenuation, third-order dispersion (dispersion slope),
and nonlinear coefficient � � are fixed and equal for all fiber segments. In this chapter, we use
� �� � � dB/km, giving an effective length � ���� � � ����� � km, and � � � �
/W-km, giving a nonlinear
interaction length � � � of about� � �
km for an input power level of�
mW. As already noted, we
assume the dispersion slope to be zero.
Figures 5.4 (a)-(d) show plots of the MCB as a function of the total equivalent span gain for
different peak input powers for the different configurations shown in Figure 5.1 (a)-(d), respectively,
using optimal dispersion parameters. For low amplifier gains, the performance improves propor-
tional to the amplifier gains due to the increase in received power levels compared to the thermal
noise at the receiver. In contrast, for large amplifier gains, the performance degrades considerably
more rapidly than the improvement in the performance seen at lower power levels. This is due to the
fact that the increase in received power is proportional to the amplifier gain, whereas the degradation
in performance due to fiber nonlinearities is proportional to the cube of the amplifier gain. There
is an additional degradation in performance at higher amplifier gains due to the accumulated ASE
noise at the receiver. As expected, lower peak input powers require higher gain to achieve optimal
performance compared to the higher input power levels in all plots. The received power level is
almost identical for the optimal amplifier gain for the three input levels used; the only difference in
the optimal performance is caused by the differing ASE noise.
Figure 5.4 (a) shows that for a Type A system, the system performance is determined primarily
by fiber nonlinearities. For low power levels, the performance is almost the same for all peak input
powers. The best performance is achieved when the received power is about � � dBm, which con-
firms previous analytical [77] and experimental [78] results stating that if the power levels are below�
dBm, the nonlinearities do not affect the system. When we use low peak input power levels, the
optimal system performance is considerably better than when the peak input power levels are high.
The Type C amplifier chain in Figure 5.4 (c) has behavior completely opposite to the Type A
system; the higher peak input powers provide better performance than the lower input peak powers.
104

−10 −5 0 5 10 15 20 25 3010
−18
10−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
Total span gain − Total span loss (dB)
Mod
ified
Che
rnof
f Bou
nd
P = −16 dBm P = −13 dBm P = −10 dBm
−10 −5 0 5 10 15 20 25 3010
−18
10−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
Total span gain − Total span loss (dB)
Mod
ified
Che
rnof
f Bou
nd
P = −16 dBm P = −13 dBm P = −10 dBm
(a) (b)
−10 −5 0 5 10 15 20 25 3010
−18
10−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
Total span gain − Total span loss (dB)
Mod
ified
Che
rnof
f Bou
nd
P = −16 dBm P = −13 dBm P = −10 dBm
−10 −5 0 5 10 15 20 25 3010
−18
10−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
Total span gain − Total span loss (dB)
Mod
ified
Che
rnof
f Bou
nd
P = −16 dBm P = −13 dBm P = −10 dBm
Total span gain - Total span loss (dB)
(c) (d)
Figure 5.4: Upper bound on the probability of error using the optimal dispersion map for differentconfigurations shown in Figure 5.1 as a function of amplifier gain for different input powers � .
105

This seems to indicate that the system is not dominated by fiber nonlinearities, which is as expected
since the power levels are lower due to the absence of a booster amplifier.For low amplifier gains,
the higher power levels obviously provide better performance and for high amplifier gains, the lower
power levels provide better performance, which is expected as the fiber nonlinearities are less in that
case. The performance at higher amplifier gains is almost the same as that for a Type A system. The
best performance is obtained for a Type C system for high peak input power levels, for a received
power level of � �dBm, which indicates that this system is ASE noise dependent.
The Type B amplifier chain performance in Figure 5.4 (b) shows that the performance is in
between that of the Type A and the Type C amplifier chains, which is expected. The system is
determined by both fiber nonlinearities and ASE noise. The plots are more symmetrical and the
best system performance is obtained for higher input peak powers and lower amplifier gains. The
received power for the best performance is about � � dBm.
Figure 5.4 (d) shows very interesting results for a Type AC system. The fiber segment lengths
for the Type AC are much longer; therefore, fiber nonlinearities are not a big problem as attenuation
reduces the signal levels to a very small values. However, the amount of improvement provided
by using optimal dispersion parameters may not be as significant, since the degrees of freedom is
small (three). The optimal performance seems to be very close for all the input peak power levels,
except that the optimal amplifier gains are obviously different. Therefore, the received power for the
optimal performance is almost the same for all the input power levels. We note that the lower input
peak power levels seem to perform slightly better than the higher input peak power levels. There is
an interesting behavior seen for medium power levels ( � � � dBm). The performance improvement
with amplifier gain reaches an optimum value, and starts degrading with increasing amplifier gains
(due to the fiber nonlinearities); however, it levels off before increasing again. Further analysis is
required before the cause of this odd behavior can be explained, or to see if it is possible to take
advantage of this behavior.
Figure 5.5 shows the total accumulated dispersion as a function of distance from the transmitter,
106

0 100 200 300−1000
−500
0
500
1000
distance from the transmitter (km)
Tot
al d
ispe
rsio
n pa
ram
eter
(ps
ec2 )
P = −16 dBm P = −13 dBm P = −10 dBm
0 100 200 300
−1200
−1000
−800
−600
−400
−200
0
distance from the transmitter (km)
Tot
al d
ispe
rsio
n pa
ram
eter
(ps
ec2 )
P = −16 dBm P = −13 dBm P = −10 dBm
0 100 200 300−500
−400
−300
−200
−100
0
distance from the transmitter (km)
Tot
al d
ispe
rsio
n pa
ram
eter
(ps
ec2 )
P = −16 dBm P = −13 dBm P = −10 dBm
0 100 200 300
−800
−600
−400
−200
0
distance from the transmitter (km)
Tot
al d
ispe
rsio
n pa
ram
eter
(ps
ec2 )
P = −16 dBm P = −13 dBm P = −10 dBm
Figure 5.5: The optimal total accumulated dispersion parameter determined by minimizing the MCBfor different configurations shown in Figure 5.1 and for different input powers. The lines indicatedispersion parameters for amplifier gains close to the optimal amplifier gains and the ’ � ’ indicatedispersion parameters for amplifier gains higher by
��� �dB per amplifier than the optimal amplifier
gains.
107

for different input power levels and for amplifier gains close to the optimum and gains slightly higher
than the optimal, for the four configurations shown in Figure 5.1. For the Type A system shown in
Figure 5.5 (a), the dispersion parameters for low input peak power levels and low amplifier gains are
negative (dispersion � is positive) in the initial segments, and is positive (dispersion � is negative)
in the later segments; the overall accumulated dispersion increases on average with power levels and
amplifier gains. However, for the largest input peak power levels and largest amplifier gains, the
optimal dispersion map is similar to the equi-modular dispersion compensation [60], which seem
to suggest that for a Type A system, for high input peak powers and for high amplifier gains, equi-
modular dispersion compensation is optimal.
For a Type C system shown in Figure 5.5 (c), the accumulated dispersion maps are similar to
those of the Type A system; however, the total dispersion parameter is always increasing with the
input peak power. The dispersion parameters increase steadily also with amplifier gains. Optimal
dispersion maps for a Type B amplifier are similar to the Type C, except that the total accumulated
dispersion parameter is close to zero, with the small total dispersion parameters increasing steadily
with amplifier gains. The most unexpected behavior is seen from the Type AC amplifier chain in
Figure 5.5 (d). The system is no longer attempting to maintain the total accumulated dispersion
parameter close to zero, allowing it to increase significantly with both the input peak power as well
as the amplifier gains. Further analysis of the analytical expressions is required before a thorough
study of the optimality of these dispersion maps can be made.
5.5 Concluding Remarks
We have presented a new methodology for designing fiber amplifier based optical communication
systems using the Volterra series transfer function (VSTF) of the fiber. A closed-form expression for
the output field of the overall system in terms of the input field and fiber and amplifier parameters
is derived. Using this expression for the output field, closed-form expressions for the modified
108

Chernoff bound on the probability of error are derived. The availability of a closed-form expression
for a bound on the probability of error allows minimization of this bound to obtain optimal system
parameters.
We have used the VSTF approach to design a relatively simple optical communication system to
demonstrate the power of the approach. We have determined the optimal dispersion parameters for
different input peak power levels and amplifier gains for different configurations used in long-haul
optical communication systems. The analysis shows that a reasonably low error probability can be
achieved by choosing dispersion parameters optimally and choosing the input peak power levels
and amplifier gains appropriately. The comparison used is the standard equi-modular compensation
used in current optical communication systems. We show that an optical communication system
using a Type A amplifier chain is dominated by fiber nonlinearities (so low input peak powers with
high amplifier gains are better), whereas a Type C system is dominated by ASE noise (so high input
peak powers with low amplifier gains should be preferred). For a Type B system, the behavior is
somewhat in between the Type A and Type C system as expected. We observe that Type C and
AC chains can achieve lower error probabilities than the Type A and B chains. We also observe
an advantage of more than one order of magnitude in using the optimal dispersion map over the
equi-modular map for some cases. This illustrates the benefits possible by optimizing system design
using our method.
More accurate analyses with less approximations are required before the results can be vali-
dated (especially by including the higher order Volterra kernels for higher input peak power levels
and higher amplifier gains). The same analysis and system design can be easily extended to more
complex wavelength division multiplexed (WDM) systems.
109

Chapter 6
Conclusions and Future Work
In this chapter we discuss the conclusions that can be made from this work about the analysis and
design of fiber-optic communication system in the presence of linear dispersion and fiber nonlinear-
ities using the Volterra series transfer function (VSTF) approach. We then discuss possible future
work concentrating more on the design of wavelength division multiplexed (WDM) systems and
improving the tools developed in the previous chapters.
6.1 Summary
Analytical expressions can be very useful in the analysis and design of future high bandwidth optical
communication systems. Due to the increased accuracy provided by analytical results, it is possible
to include all the deleterious effects in an optical communication system. The design of the system
is therefore better than possible with currently available simple models and recursive (numerical)
solutions to the wave equation in the fiber. The performance measures used to design and evaluate
current systems, such as SONET standards based on eye-diagrams, should be re-evaluated and more
stringent and realistic measures should be defined.
We present one candidate analytical method based on the Volterra series transfer function
(VSTF) that gives very good insight into the shortcomings of the analysis and design tools used
in current systems. A third-order approximation to the VSTF is accurate enough without being
110

computationally intensive, and provides improvements over the current models in most cases. How-
ever, further development of this method or newer methods are necessary before the full potential of
the analytical methods can be exploited. We have presented the modified Chernoff bound (MCB) as
a possible candidate for defining the performance of an optical communication systems, which can
include all the deleterious effects such as linear dispersion, fiber nonlinearities, and ASE noise from
the optical amplifiers.
We have presented a general method of deriving various kernels in the VSTF of a SMF. We have
demonstrated the accuracy of a third-order approximation to the VSTF by comparing the results
with those the of SSF method. We have shown that for higher power levels, higher-order kernels are
required to be included to give comparable results to the SSF method. We have demonstrated the
potential of the VSTF approach by designing a complex fiber-optic link including fiber amplifiers
and by designing an optimal lumped equalizer. We have shown the accuracy of the VSTF approach
in modeling multi-frequency propagation in the fiber. We have determined the optimal input param-
eters (pulse-width, power, and coherence time) required to get a minimum output RMS pulse-width
and maximum optical signal-to-interference ratio (SIR).
We have investigated the effect of phase noise on high speed optical communication systems
including only the linear dispersion effects. We have shown that the effects of phase noise can not
be analyzed properly by including its effect on the source line-width only. The previous studies
based on line-width use only the mean and variance of the input field, whereas we include mean
and covariance of the input field. Although, we do not obtain analytical results for the effects of
phase noise, this more accurate analysis provides insight into the incorrect assumptions made in the
current analysis and provides a strong platform to perform further analysis.
We have demonstrated the power of the VSTF approach in modeling the propagation of light in
the fiber by designing a simple optical communication system. Fixing all the other parameters in the
system, we determine the optimal dispersion parameters of the fiber segments used in the system.
We study the improvement provided by using the optimal dispersion parameters, and study the effect
111

of the choice of input power levels and amplifier gains on the optimum dispersion parameters and
the probability of error. We also study the relative merits of different amplifier chains used in current
systems.
Now we consider the most important application of the VSTF method, where it can have the
most impact, namely wavelength division multiplexed (WDM) systems. Then we consider a few
topics of further work to be done to utilize the advantages provided by the VSTF approach.
6.2 Future Work
Most high throughput communication systems use WDM to increase he capacity. The effects of
fiber nonlinearity are more pronounced in WDM systems than in single-user systems since the total
power is higher and the frequency content is broader. As a part of future work we show in Appendix
A how the VSTF can model the three nonlinear Kerr effects observed in WDM systems. The ana-
lytical expressions are found to be the same as the most accurate analysis available in the literature.
Therefore, we can conclude that modeling of WDM systems can also be carried out with the same
accuracy as the single-user communication systems. There are many aspects of WDM that can be
considered in system design, such as the number of channels, wavelength assignment, user powers,
and pulsewidths. The VSTF can be a powerful tool is the optimal design of such systems.
The Volterra kernel model used in this work has been derived using many significant assump-
tions and is presented to show the validity of the approach. For higher power levels, higher-order
Volterra kernels are necessary which make the VSTF approach impractical. Therefore, better non-
linear models that are more representative of the fiber nonlinearities (e.g., phase-only effects) in an
optical fiber are required. Even though the value of the availability of analytical expressions has
been stressed in this dissertation, there is no analysis of various phenomena presented and how the
VSTF approach can model the nonlinear phenomena in an optical fiber better is not shown. A fuller
analysis of various effects in the fiber is required to gain more understanding of the design and anal-
112

ysis of optical communication systems. More specifically, we have to find a symmetrized version
(with respect to the arguments to the kernels) of the VSTF presented in Chapter 3, which will make
it invariant to the order of inputs and the arguments of the Volterra kernels [79, 80]. The convergence
properties of the VSTF as a function of power levels, lengths of fibers, and pulse-width have to be
quantified to determine when it is necessary to include higher-order Volterra kernels.
The split-step Fourier (SSF) approach is not a valid method for modeling bi-directional systems
[81]; the SSF method requires knowledge of signals propagating in both directions in each segment
to calculate the evolution of the fields in the fiber. Recursively running the SSF method through the
length of the fiber calculating the field in one direction while using the signals for the other direction
from previous iterations is one approach of analyzing the performance, but the requirement to store
the field for each segment length for the whole fiber and the computational cost make it impractical.
Since the VSTF approach provides a closed-form solution, it can model the behavior of the bi-
directional systems as a simple extension of the model presented in Chapter 3.
The fiber amplifier is modeled as a linear filter in this work. A nonlinear (possibly Volterra
series) model to describe the behavior of the amplifier including the saturation properties [27] and
inter-modulation distortion [82] between various channels in a multi-user system is required. The
saturation induced cross-talk is due to the dependence of the carrier or ion concentration in the
gain medium of the amplifier on the input intensity. More sophisticated models based on the VSTF
method can be derived as an easy extension of the work presented in this dissertation. Currently
the threshold at the receiver is varied based on the receiver�
, in an ad-hoc fashion as a function
of median received signal levels to reduce the effects of saturation induced cross-talk, which is not
optimal. The VSTF can describe the behavior of the amplifier in saturation, or at least a statistical
description of the EDFA behavior in saturation based in VSTF can easily be derived for current
power levels used in terrestrial systems. Inter-modulation distortion is significant only when the
wavelengths are so closely spaced that the ion density can respond only at the beat frequency.
Polarization mode dispersion (PMD) [23, 83, 84] is significant in optical communication systems
113

longer than��� � �
km. We have to include the PMD effects in the Volterra series to better model the
behavior of the optical communication system. Wai and Menyuk have formulated the problem of
analyzing PMD as solving a stochastic differential equation in the frequency domain in [23]. We
have solved the deterministic NLS equation using VSTF method in this dissertation, and it is a
straight-forward extension to solve the stochastic NLS equation using the Ito operator used also in
[23].
We have shown that WDM systems can be modeled easily with the VSTF method including all
the major effects observed in experiments. The effect of dispersion slope on the WDM systems can
be easily accommodated in the Volterra series approach and the dispersion slopes can be tailored to
get the required dispersion maps to assure that the probability of error for all the users is the same
and is a minimum. From the results in Chapter 5, it is not clear how the dispersion maps that are
optimum for single-user systems work for multi-user systems like WDM systems. Further analysis
based on Appendix A is required to understand the behavior of the system.
The Volterra series model used in this work can be used to study the transmission of solitons in a
fiber-optic medium. Since analytical expressions are available, we can find the stochastic properties
of the output pulse such as timing jitter, amplitude jitter, etc. [22] and choose the fiber to suit the
soliton-propagation and thus improve the performance of soliton systems.
The Volterra series method is a general method of solving the NLS equation, and therefore it can
be used to model coherent optical systems, especially dense WDM systems [49]. The expressions for
coherent systems are simpler as they depend only upon the output field rather than output intensity
(direct-detection). However, the effect of phase noise of both the input laser and the local oscillator
has to be included in the output statistics, which makes the analysis using the results from Chapter
3 and 4 more useful.
Using the already available Volterra series models for the semiconductor laser nonlinearities
[4, 5], we can develop more accurate analytical expressions for the output field in analog optical
communication systems [7]. Since the requirements of analog communications are more severe
114

and fiber nonlinearities and dispersion can at best be perturbations, the third-order approximation to
the Volterra model is more suitable for use in analog systems, making the analysis and design very
simple.
We have assumed a photo-detector with ideal impulse response, which is not very realistic. It
is quite straight-forward to include the photo-detector response in the moment generating functions
(MGF) [21], and derive more realistic upper bound on the probability of error following the analysis
in Chapter 5.
We have considered only point-to-point optical fiber links in this work. Due to the increasing de-
mand for more bandwidth, optical networks are becoming more and more complex. Minimizing the
probability of error for the whole network is of interest, and the true capability of the VSTF method
can be exploited to optimize the system performance for all users and channels in the network.
With the increasing accuracy of current tapped delay lines, optical signal processing is becoming
more and more popular for incoherent light. Nonlinear coherent couplers have been suggested
[20, 72, 73] to perform the basic switching and basic processing in the optical domain. The VSTF
model is an universal tool that can even include these complex components in the analysis and design
of systems.
We would like to conclude this dissertation with the hope that the basic theory presented in this
dissertation will stimulate further work improving the VSTF design tools and applying it to future
high capacity photonic networks, thus making system design more science than art.
115

Appendix A
Analysis of WDM Systems Using VSTFmethod
Although the VSTF method is equally valid for analyzing TDM and CDM systems, we concentrate
on WDM systems in this appendix. In a WDM system, the wavelength or frequency of the optical
carrier is used to multiplex the signals from various users. These signals are extracted from the
composite signal using wavelength selective switches. Typical wavelength spacings are � � � GHz
for WDM systems and��� �
GHz for dense WDM (OFDM) systems.
In addition to all the factors considered for single-user systems, there are a few additional factors
that should be taken into account for the WDM systems due to the presence of signal at various
frequencies, e.g., the effect of the group velocity�� and the dispersion (frequency-dependence) of
the nonlinear refractive index � � - � . Since pulses at different wavelengths propagate at different
speeds inside the fiber, because of the group-velocity mismatch, the faster moving pulse “walks
through” the slower moving pulses. The walk-off parameter is the fiber length over which one pulse
”walks through” another slow moving pulse. In a typical WDM system, a fast moving pulse can
walk through about��� � �
pulses in a long haul network, thus introducing nonlinearities that extend
over thousands of pulses.
In single-user communications, for pulse-widths greater than about� � �
psec, the dispersion
116

(frequency-dependence) of the nonlinear refractive index � � - � can be ignored�. However, when
multiple users are present, frequency dependence of the the Kerr effects and Raman effects has to
be included. When using the split-step Fourier method, the dispersion (frequency-dependence) of
Raman effects are included in the frequency-domain and the Kerr effects are included in the time-
domain, which makes switching between the time- and frequency-domains necessary [38]. With the
availability of the Volterra kernel method, the frequency dependence of these nonlinear effects can
be included.
The dispersion (frequency-dependence) of the nonlinear part of the refractive index is assumed
to be a perturbation of the overall refractive index. This assumption is valid if the intensities we are
considering are small. If we assume transmission at multiple frequencies/wavelengths at practical
power levels ( � � mW), we need to include the frequency dependence of � � - � and we can include
� � - � as shown in [58].
Now we consider various phenomena observed in WDM systems, and see how well the VSTF
models them. For a WDM system, the complex envelope of the input field is the sum of complex en-
velopes (about a common central frequency) of the signals from�
users with the � th user operating
at a wavelength of - � ,� � ��� �
��� � �
�� � � � �� ����� �,� � $ �
��� � �
�� �
���� �� & � �� � ��� � �� � ��� �,� � $ (A.1)
where � � is the peak power of the input pulse of the � th user, & � �� are the transmitted bits of user � ,
� ��� ��� � � � � � � ��� is the basic pulse shape used by all users to transmit the � th bit, and � is the
delay of � th user relative to user�.
Let us examine the linear and nonlinear parts of the mean output field given by (5.9) for the input
(A.1) separately. Writing � - � � � � - � � � �'�� - � , the Fourier transform of the linear part is a�For pulse widths ������� psec, the electronic contribution to the third-order susceptibility ���� occurs at a time scale
of ������� fsec in optical fibers.
117

sum of the filtered outputs of different users,
� � - � � � � � � - � ��� � �
�� �
���� �� & � �� � ��� - � - � � � (A.2)
It contains ISI components of a single user due to adjacent bits transmitted by the same user and
any possible signal from adjacent users due to improper optical filtering at the receiver. The Fourier
transform of the nonlinear part contains various terms that represent self-phase modulation (SPM),
cross-phase modulation (CPM), and four-wave mixing (FWM) terms, without ASE noise,
� �� - � ���� � � �
� � � � � - � � �� �� � � � �� � � � � ��� � � - �
�
��� � � �
� � � � � - � � � � � �� - � ��- � ��- � - � ��- � �
�� ��� � � �
�� � �
��� �*� �
�� � �
��� ��� �
�� � �
� � �� - � � � � �
�� - � � � � �
� - � - � ��- � ��� � � � ��� - � � � � � � ��� � - � ��� � � � ��� - � - � ��- � �� � � �� - � � - � � � � � ����
� - � � - � � � � � �,�� - � - � ��- � � - � � � � - � � - � (A.3)
We now see how the VSTF model can predict the four-wave mixing products. We can get
expressions for SPM and CPM by taking the appropriate terms from the FWM expression. While
modeling the FWM in optical fibers, different wavelengths are assumed to be sinusoids, which in
the frequency domain are impulse functions. Therefore, assuming� � - � � � - � , we get
� �� - � � ���� � � �
� � � � � - � � � � �� - � � ��- � � ��- � � �
��� � � �
�� � �
��� �&� �
�� � �
��� ��� �
�� � �
� � �� - � � � � � �
�� - � ��� � � �
� - � � � � � � � ��� - � � � � � � � ��� � - � � ��� � � � ��� - � � � (A.4)
for - � � - � � � - � � ��- � � . From (3.10), we get the third-order Volterra kernel as
� � �� - � � ��- � � ��- � � � � ��� � � � � �� � ��� ��� ��� � � � � � � �
� ����� � � � ��� � � � � � � ��� � � � ��� � ��� � � � � � � ��� � � ��� � � ���� � � � � � - � � � � � � � - � � � � � � � - � � � � � � � - � ���
(A.5)
which makes (A.4) the same as the expression obtained originally by Inoue [62] and later developed
to include the spectral distribution of ASE noise in [63]. This demonstrates that the VSTF model
118

can easily model FWM with equal accuracy compared to the most accurate solution available in the
literature.
Now we show the results for SPM and CPM derived from the FWM expressions. Self-phase
modulation is the nonlinear interaction of the user with its own signal, i.e., we should set - � � �- � � � - � � � - � for user � ,
�� � ��� - � ���
��� � � �
� � � � � - � � � � ���� � � � �� � � � �
� - � ��� � � � �� - � ��� � � � � ��� - � � � � � � � � ��� - � � � (A.6)
Similarly, cross-phase modulation for user � is due to ' � � � � � � � � � ��( and ' � � � � � � � � � ��(
�� � ��'� - � � � �
��� � � �
� � � � � - � � � � ����� ��� � � �
� � � � � � � �� - � � � � � � �
� - � � � � � � � ��� - � � � � � � � � ��� - � � (A.7)
For any multi-user system like WDM, TDM, or CDM systems, we are interested only in the
information transmitted by one particular user. Using the VSTF we can design an optimal detector
for decoding information transmitted by a single user. When we know the input statistical properties
of the interfering users, we can design a nonlinear equalizer to reduce the inter-channel crosstalk that
arises due to the nonlinear interaction between the signals from various users. Therefore, with the
knowledge of the first � moments of the input signals of the interfering users, we can design an � th-
order Volterra series approximation to a single-user equalizer/detector for removing the interference
from other users for a CDM/WDM/TDM system similar to the single-user case as shown in Chapter
3. This is the subject of further research.
119

Bibliography
[1] F. J. Denniston and P. K. Runge, “The glass necklace,” IEEE Spectrum, pp. 24–27, October
1995.
[2] F. B. Mezger, “Overlapping signature sequence in dispersion limited optical code division
multiple access systems,” Master’s Thesis, January 1996.
[3] F. B. Mezger, M. Brandt-Pearce, and K. V. Peddanarappagari, “Dispersion limited fiber-optic
CDMA systems,” Submitted to IEEE Transactions on Communications, Revised, July 1997.
[4] H. M. Salgado and J. J. O’Reilly, “Performance assessment of FM broadcast subcarrier-
multiplexed optical systems,” IEE Proceedings-J, vol. 140, no. 6, pp. 397–403, December
1993.
[5] H. M. Salgado and J. J. O’Reilly, “Volterra series analysis of distortion in semiconductor laser
diodes,” IEE Proceedings-J, vol. 138, no. 6, pp. 379–382, December 1991.
[6] K. Petermann, Laser Diode Modulation and Noise, Kluwer Academic Publishers, The Nether-
lands, 1988.
[7] C. Y. Kuo, “Fundamental nonlinear distortions in analog links with fiber amplifiers,” Journal
of Lightwave Technology, vol. 11, no. 1, pp. 7–15, January 1993.
120

[8] A. Finch, X. Zhu, P. N. Kean, and W. Sibbett, “Noise characterization of mode-locked color-
center laser sources,” IEEE Journal of Quantum Electronics, vol. 26, no. 6, pp. 1115–1123,
June 1990.
[9] C. H. Henry, “Theory of the linewidth of semiconductor lasers,” IEEE Journal of Quantum
Electronics, vol. 18, February 1982.
[10] G. Jacobsen, Noise in digital optical transmission systems, Artech House, Boston, 1994.
[11] I. Garrett, D. J. Bond, J. B. Waite, D. S. L. Lettis, and G. Jacobsen, “Impact of phase noise in
weakly coherent systems: A new and accurate approach,” Journal of Lightwave Technology,
vol. 8, no. 3, pp. 329–336, March, 1990.
[12] G. L. Pierbon and L. Tomba, “Moment characterization of phase noise in coherent optical
systems,” Journal of Lightwave Technology, vol. 9, no. 8, pp. 996–1017, August 1991.
[13] A. Murat and P. A. Humblet, “Envelope detection of orthogonal signals with phase noise,”
Journal of Lightwave Technology, vol. 9, no. 10, pp. 1398–1410, October 1991.
[14] J. Wang and K. Petermann, “Small signal analysis for dispersive optical fiber communication
systems,” Journal of Lightwave Technology, vol. 10, no. 1, pp. 96–100, January 1992.
[15] W. C. Kwong, P. R. Prucnal, and M. C. Teich, “Coherent subcarrier fiber-optic communication
systems with phase-noise cancellation,” IEEE Transactions on Communications, vol. 42, no.
6, pp. 2208–2212, June 1994.
[16] E. Forestieri and G. Prati, “Theoretical analysis of coherent optical FSK systems with limiter-
discriminator detection,” IEEE Transactions on Communications, vol. 42, no. 2-4, pp. 562–
573, February-March 1994.
[17] Y. E. Dallal and S. Shamai, “Power moment derivation for noisy phase lightwave systems,”
IEEE Transactions on Information Theory, vol. 40, no. No. 6, pp. 2099–2103, November 1994.
121

[18] R. F. S. Ribeiro, J. R. F. da Rocha, and A. V. T. Cartaxo, “Influence of laser noise on dispersive
optical fiber communication systems,” Photonics Technology Letters, vol. 7, no. 12, pp. 1510–
1512, December 1995.
[19] D. R. Walker, D. W. Crust, W. E. Sleat, and W. Sibbett, “Reduction of phase noise in passively
mode-locked lasers,” IEEE Journal of Quantum Electronics, vol. 28, no. 1, pp. 289–296,
January 1992.
[20] G. P. Agrawal, Nonlinear Fiber Optics, 2nd Ed., Academic Press, San Diego, 1995.
[21] Saleh B., Photoelectron Statistics, Springer-Verlag, New York, 1978.
[22] M. Hisakado, T. Iizuka, and M. Wadati, “Coupled hybrid nonlinear schroedinger equation and
optical solitons,” Journal of Physical Society of Japan, vol. 63, no. 8, pp. 2887–2894, August
1994.
[23] P. K. A. Wai and C. R. Menyuk, “Polarization mode dispersion, decorrelation, diffusion in
optical fibers with randomly varying birefringence,” Journal of Lightwave Technology, vol.
14, no. 2, pp. 148–157, February 1996.
[24] J. Winters and R. Gitlin, “Electrical signal processing techniques in long-haul fiber-optic sys-
tems,” IEEE Transactions on Communications, vol. 38, no. 9, pp. 1439–1453, September,
1990.
[25] R. M. Gagliardi and S. Karp, Optical Communications, John-Wiley and Sons Inc., New York,
1995.
[26] J. Gowar, Optical Communication Systems, Prentice Hall, Englewood Cliffs, 1993.
[27] Desurvire E., Erbium-Doped Fiber Amplifiers - Principles and Applications, A Wiley-
Interscience Publication, New York, 1995.
122

[28] D. Marcuse, “Pulse distortion in single-mode fibers,” Applied Optics, vol. 19, no. 10, pp.
1653–1660, May 1980.
[29] J. O’Reilly and J. Da Rocha, “Linear direct-detection fiber-optic receiver optimization in the
presence of intersymbol interference,” IEEE Transaction on Communications, vol. 34, no. 4,
pp. 365–374, April 1986.
[30] J. O’Reilly and J. Da Rocha, “Improved error probability evaluation methods for direct-
detection optical communication systems,” IEEE Transaction on Information Theory, vol.
33, no. 6, pp. 839–848, November 1987.
[31] R. H. Stolen, “Nonlinearity in fiber transmission,” Proceedings of IEEE, vol. 68, no. 10, pp.
1232–1236, October 1986.
[32] D. Marcuse, “RMS width of pulses in nonlinear dispersive fibers,” Journal of Lightwave
Technology, vol. 10, no. 1, pp. 17–21, January 1992.
[33] A. R. Chraplyvy, “Limitations on lightwave communications imposed by optical fiber nonlin-
earities,” Journal of Lightwave Technology, vol. 8, no. 10, pp. 1548–1557, October 1990.
[34] X. S. Yao, J. Feinberg, R. Logan, and L. Maleki, “Limitations on peak pulse power, pulse
width, and coding mask misalignment in a fiber-optic code-division multiple-access system,”
Journal of Lightwave Technology, vol. 11, no. 5/6, pp. 836–846, May/June 1993.
[35] M. Stern, J. P. Heritage, N. Thurston, and S. Tu, “Self-phase modulation and dispersion in high
data rate fiber-optic transmission systems,” Journal of Lightwave Technology, vol. 8, no. 7, pp.
1009–1015, July 1990.
[36] K. Metzger and R. Valentin, “Intersymbol interference due to linear and nonlinear distortion,”
IEEE Transactions on communications, vol. 44, no. 7, pp. 809–816, July 1996.
123

[37] W. J. Tomlinson and R. H. Stolen, “Non-linear phenomena in optical fibers,” IEEE Communi-
cations Magazine, vol. 26, no. 4, pp. 36–44, April, 1988.
[38] P. L. Francois, “Nonlinear propagation of ultrashort pulses in optical fibers: total field formu-
lation in the frequency domain,” Journal of Optical Society of America, B, vol. 8, no. 2, pp.
276–293, February 1991.
[39] C. Pask and A. Vatarescu, “Spectral approach to pulse propagation in a dispersive nonlinear
medium,” Journal of Optical Society of America, B, vol. 3, no. 7, pp. 1018–1024, July 1986.
[40] Y. Kodama and A. Hasegawa, “Nonlinear pulse propagation in a monomode dielectric guide,”
IEEE Journal of Quantum Electronics, vol. 23, no. 5, pp. 510–524, May 1987.
[41] T. R. Taha and M. J. Ablowitz, “Analytical and numerical aspects of certain nonlinear evolution
equation, II, numerical, nonlinear Schroedinger equation,” Journal of Computational Physics,
vol. 5, pp. 203–230, 1984.
[42] S. Deb and A. Sharma, “Nonlinear pulse propagation through optical fibers: an efficient nu-
merical method,” Optical Engineering, vol. 32, no. 4, pp. 695–699, April 1993.
[43] L. R. Watkins and Y. R. Zhou, “Modeling propagation in optical fibers using wavelets,” Journal
of Lightwave Technology, vol. 12, no. 9, pp. 1536–1542, September 1994.
[44] Tingye Li, “The impact of optical amplifiers on long-distance lightwave telecommunications,”
Proceedings of The IEEE, vol. 81, no. 11, pp. 1568–1579, November 1993.
[45] Gordon J. P. and Mollenauer L. F., “Effects of fiber nonlinearities and amplifier spacing on
ultra-long distance transmission,” Journal of Lightwave Technology, vol. 9, no. 2, pp. 170–173,
February 1991.
[46] N. A. Olsson, “Lightwave systems with optical amplifiers,” Journal of Lightwave Technology,
vol. 7, no. 7, pp. 1071–1082, July 1989.
124
[47] M. J. O’Mahony, “Semiconductor laser optical amplifiers for use in future fiber systems,”
Journal of Lightwave Technology, vol. 6, no. 4, pp. 531–544, April 1988.
[48] D. L. Snyder, Random Point Processes, A Wiley Interscience Publication, New York, 1995.
[49] L. G. Kazovsky, “Multichannel coherent optical communications,” Journal of Lightwave
Technology, vol. 5, no. 8, pp. 1095–1102, August 1987.
[50] N. S. Bergano and C. R. Davidson, “Wavelength division multiplexing in long-haul transmis-
sion systems,” Journal of Lightwave Technology, vol. 14, no. 6, pp. 1299–1308, June 1996.
[51] R. A. Saunders, B. L. Patel, and D. Garthe, “System penalty at 10 Gb/s due to modulation
instability and its reduction using dispersion compensation,” IEEE Photonics Technology Let-
ters, vol. 9, no. 5, pp. 699–701, May 1997.
[52] M. O. van Deventer, S. Wingstrand, B. Hermansson, A. Bolle, P. Jalderot, C. Backdahl, and
J. Karlsson, “BER floor due to modulation instability in a 2.5 Gbit/s field trial with +22 dBm
booster EDFA,” Optical Fiber Technology, vol. 2, pp. 183–187, April 1996.
[53] W. h. Loh, R. I. Laming, N. Robinson, F. Vainetti, C. J. Anderson, M. N. Zervas, and M. J.
Cole, “Dispersion compensation over distances in excess of��� �
km for��� � Gb/s systems
using chirped fiber gratings,” IEEE Photonics technology letters, vol. 8, no. 7, pp. 944–946,
July 1996.
[54] Ribeiro L. F. B., J. R. F. Rocha, and Pinto J. L., “Performance evaluation of EDFA preamplified
receivers taking into account intersymbol interference,” Journal of Lightwave Technology, vol.
13, no. 2, pp. 225–231, February 1995.
[55] J. A. Bucklew, Large Deviation Techniques in Decision, Simulation, and Estimation, John
Wiley and Sons, New York, 1990.
125

[56] R. J. Nyuts, Y. K. Park, and P. Gallion, “Dispersion equalization of a 10 Gb/s repeatered
transmission system using dispersion compensating fibers,” Journal of Lightwave Technology,
vol. 15, no. 1, pp. 31–41, January 1997.
[57] D. W. Rush, G. L. Burdge, and P. T. Ho, “The linewidth of a mode-locked semiconductor laser
caused by spontaneous emission: Experimental comparision to single-mode operation,” IEEE
Journal of Quantum Electronics, vol. 22, no. 11, pp. 2088–2091, November 1986.
[58] M. Sheik-Bahae, D. C. Hutchings, D. J. Hagan, and E. W. van Stryland, “Dispersion of bound
electronic nonlinear refraction in solids,” IEEE Journal of Quantum Electronics, vol. 27, no.
6, pp. 1296–1309, June 1991.
[59] D. J. Moss, E. Ghahramani, J. E. Sipe, and H. M. van Driel, “Band-structure calculation of
dispersion and anisotropy in � � � for third-harmonic generation in Si, Ge, and GaAs,” Physical
Review, B, vol. 41, no. 3, pp. 1542–1560, January 1990.
[60] R. W. Tkach, A. R. Chraplyvy, F. Forghieri, A. H. Gnauck, and R. M. Derosier, “Four-photon
mixing and high-speed WDM systems,” Journal of Lightwave Technology, vol. 13, no. 5, pp.
841–849, May 1995.
[61] K. Inoue, “A simple expression for optical fdm networks scale considering fiber four-wave
mixing and optical amplifier noise,” Journal of Lightwave Technology, vol. 13, no. 5, pp.
856–867, May 1995.
[62] K. Inoue and H. Toba, “Fiber four-wave mixing in multi=amplifier systems with nonuniform
chromatic dispersion,” Journal of Lightwave Technology, vol. 13, no. 1, pp. 88–93, January
1995.
126

[63] W. Zeiler, F. D. Pasquale, and P. Bayvel J. E. Midwinter, “Modeling of four-wave mixing and
gain peaking in amplified WDM optical communication systems and networks,” Journal of
Lightwave Technology, vol. 14, no. 9, pp. 1933–1942, September 1996.
[64] F. Forghieri, R. W. Tkach, and A. R. Chraplyvy, “WDM systems with unequally spaced chan-
nels,” Journal of Lightwave Technology, vol. 13, no. 5, pp. 889–897, May 1995.
[65] D. N. Christodoulides and R. B. Jander, “Evolution of stimulated raman crosstalk in wave-
length division multiplexed systems,” IEEE Photonics Technology Letters, vol. 8, no. 12, pp.
1722–1727, December 1996.
[66] Fellegara A., “Theoretical and experimental investigation of the optimum location for an in-
line fiber amplifier in high bit rate transmission systems,” Optical Fiber Technology, vol. 2, pp.
225–234, July 1996.
[67] Song J., Fan C., Yang Z., Yao Y., and Feng C., “Signal restoration and BER performance of
perturbed terrestrial cascaded EDFA systems,” Journal of Lightwave Technology, vol. 7, no. 7,
pp. 1071–1082, July 1989.
[68] J.J. O’Reilly and J.R.F. da Rocha, “Linear direct-detection fiber-optic receiver optimization in
the presence of intersymbol interference,” IEEE Transactions on Communications, vol. 34, no.
4, pp. 365–374, April 1986.
[69] R.S. Fyath and J.J. O’Reilly, “Comprehensive moment generating function characterisation of
optically preamplified receivers,” IEE Proceedings, vol. 137, no. 6, pp. 391–396, December
1990.
[70] M. Schetzen, The Volterra and Wiener Theories of Nonlinear Systems, Wiley, New York, 1989.
[71] S. S. Jha and N. Bloembergen, “Nonlinear optical susceptibilities in group-IV and III-V semi-
conductors,” Chemical Review, vol. 171, no. 3, pp. 891–898, July 1968.
127

[72] S. M. Jensen, “The nonlinear coherent coupler,” IEEE Journal of Quantum Electronics, vol.
QE-18, no. 10, pp. 1580–1583, October 1982.
[73] P. L. K. Wa, J. E. Sitchand, N. J. Mason, J. S. Roberts, and P. N. Robson, “All optical multiple-
quantum-well waveguide switch,” Electronic Letters, vol. 21, no. 1, pp. 26–27, January 1985.
[74] O. K. Tonguz, “Theory of direct-detection lightwave receivers using optical amplifiers,” IEEE
Journal of Lightwave Technology, vol. 9, pp. 174–181, February 1991.
[75] B. Wedding, B. Franz, and B. Junginger, “10-Gb/s optical transmission up to 253 km via
standard single-mode fiber using the method of dispersion-supported transmission,” Journal
of Lightwave Technology, vol. 12, no. 10, pp. 1720–1728, October, 1994.
[76] O’Reilly J. and da Rocha J., “Improved error probability evaluation methods for direct detec-
tion optical communication systems,” IEEE Transactions on Information Theory, vol. IT-33,
no. 6, pp. 839–848, November 1987.
[77] N. Kikuchi and S. Sasaki, “Analytical evaluation technique of self-modulation effect on the
performance of cascaded optical amplifier systems,” Journal of Lightwave Technology, vol.
13, no. 5, pp. 868–878, May 1995.
[78] N. Henmi and T. Saito S. Nakaya, “An arrangement of transmission-fiber dispersions for
increasing the spacing between optical amplifiers in lumped repeater systems,” IEEE Photonics
Technology Letters, vol. 5, no. 11, pp. 1337–1340, November 1993.
[79] H. K. Thapar and B. J. Leon, “Transform-domain and time-domain characterization of nonlin-
ear systems with volterra series,” IEEE Transactions on Circuits and Systems, vol. 31, no. 10,
pp. 906–912, October 1984.
128

[80] G. E. Mitzel, S. J. Clancy, and W. J. Rugh, “On transfer function representations for homo-
geneous nonlinear systems,” IEEE Transactions on Automatic Control, vol. 24, no. 2, pp.
242–249, April 1979.
[81] F. Khalegi, J. Li, M. Kavehrad, and H. Kim, “Increasing repeater span in high-speed bidi-
rectional WDM transmission systems using a new bidirectional EDFA configuration,” IEEE
Photonics Technology Letters, vol. 8, no. 9, pp. 1252–1254, September 1996.
[82] D. M. Baney and J. Stimple, “WDM EDFA gain characterization with a reduced set of saturat-
ing channels,” IEEE Photonics Technology Letters, vol. 8, no. 12, pp. 1615–1617, December
1996.
[83] J. S. Garcia, A. G. Gonzalez, and M. L. Iribas, “Polarization mode dispersion power penalty;
influence of rise/fall times, receiver Q, and amplifier noise,” IEEE Photonics technology letters,
vol. 8, no. 12, pp. 1719–1727, December 1996.
[84] E. Lichtman, “Limitations imposed by polarization-dependent gain and loss on all-optical
ultralong lightwave systems,” Journal of Lightwave Technology, vol. 13, no. 5, pp. 906–913,
May 1995.
129


















