DESENVOLVIMENTO DE PROTÓTIPO E SOFTWARE DE … · PRÓTESE DE MEMBRO SUPERIOR PROTOTYPE...
7
MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail: [email protected] 1 DESENVOLVIMENTO DE PROTÓTIPO E SOFTWARE DE CONTROLE DE PRÓTESE DE MEMBRO SUPERIOR PROTOTYPE DEVELOPMENT AND CONTROL SOFTWARE OF UPPER LIMB PROSTHESIS Crisman Penalva Santos – Graduando em Engenharia da Computação – Unisalesiano Araçatuba - [email protected] Bruno Calhiari – Graduando em Engenharia Mecatrônica – Unisalesiano Araçatuba - [email protected] Fernando Henrique Alves Benedito – Graduando em Engenharia Mecatrônica – Unisalesiano Araçatuba - [email protected] Prof. Orientador Dr. Edval Rodrigues de Viveiros – Unisalesiano Araçatuba – [email protected] RESUMO A tecnologia de desenvolvimento de próteses biônicas ainda é incipiente no Brasil, comparando-se com outros países, contrastando com a crescente demanda de produtos nesta área, ocasionado ou por problemas de má formação genética, ou ainda pelo aumento na quantidade de acidentes no trânsito e outras causas. Pensando-se no alto custo de tais equipamentos, desenvolveu-se neste projeto um protótipo de uma mão biônica de baixo custo. Além da construção desta prótese de membro superior, fundamentada em medidas antropométricas, o projeto traz como inovação tecnológica o uso de uma Interface crebro-computador (ICC) não invasiva, para controle mecatrônico da mesma. Uma primeira etapa de comunicação entre o microcontrolador e os servomotores da mão biônica foi executada, assim como o comando e controle via computador. Atualmente trabalha-se nos últimos ajustes computacionais e mecatrônicos para se efetuar a comunicação entre a ICC e respectivo software de controle da mão biônica. Palavras-chave: Prótese de membro superior. Interface crebro-computador. Automação e Controle. INTRODUÇÃO O grande paradigma que envolve o desenvolvimento da tecnologia de interface crebro-computador concentrava-se na aplicação dos modelos de mapeamento funcional de Brodmann e Broca, modelos estes que limitavam a interpretação sobre os níveis elétricos dos chamados potenciais de ação. Trabalhos conduzidos por Miguel Nicolelis e colaboradores possibilitaram desenvolver-se algoritmos computacionais baseados em redes neurais e inteligência artificial, de modo a permitir utilizar padrões de reconhecimento (pattern recognition) de cada ação cognitivo- motora, para posterior construção de vários tipos e modelos de interface cérebro-
Transcript of DESENVOLVIMENTO DE PROTÓTIPO E SOFTWARE DE … · PRÓTESE DE MEMBRO SUPERIOR PROTOTYPE...

MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
DESENVOLVIMENTO DE PROTÓTIPO E SOFTWARE DE CONTROLE DE
PRÓTESE DE MEMBRO SUPERIOR
PROTOTYPE DEVELOPMENT AND CONTROL SOFTWARE OF UPPER LIMB PROSTHESIS
Crisman Penalva Santos – Graduando em Engenharia da Computação –
Unisalesiano Araçatuba - [email protected] Bruno Calhiari – Graduando em Engenharia Mecatrônica – Unisalesiano Araçatuba
- [email protected] Fernando Henrique Alves Benedito – Graduando em Engenharia Mecatrônica –
Unisalesiano Araçatuba - [email protected] Prof. Orientador Dr. Edval Rodrigues de Viveiros – Unisalesiano Araçatuba –
RESUMO
A tecnologia de desenvolvimento de próteses biônicas ainda é incipiente no Brasil, comparando-se com outros países, contrastando com a crescente demanda de produtos nesta área, ocasionado ou por problemas de má formação genética, ou ainda pelo aumento na quantidade de acidentes no trânsito e outras causas. Pensando-se no alto custo de tais equipamentos, desenvolveu-se neste projeto um protótipo de uma mão biônica de baixo custo. Além da construção desta prótese de membro superior, fundamentada em medidas antropométricas, o projeto traz como inovação tecnológica o uso de uma Interface cerebro-computador (ICC) não invasiva, para controle mecatrônico da mesma. Uma primeira etapa de comunicação entre o microcontrolador e os servomotores da mão biônica foi executada, assim como o comando e controle via computador. Atualmente trabalha-se nos últimos ajustes computacionais e mecatrônicos para se efetuar a comunicação entre a ICC e respectivo software de controle da mão biônica.
Palavras-chave: Prótese de membro superior. Interface cerebro-computador. Automação e Controle.
INTRODUÇÃO
O grande paradigma que envolve o desenvolvimento da tecnologia de interface
cerebro-computador concentrava-se na aplicação dos modelos de mapeamento
funcional de Brodmann e Broca, modelos estes que limitavam a interpretação sobre
os níveis elétricos dos chamados potenciais de ação. Trabalhos conduzidos por
Miguel Nicolelis e colaboradores possibilitaram desenvolver-se algoritmos
computacionais baseados em redes neurais e inteligência artificial, de modo a permitir
utilizar padrões de reconhecimento (pattern recognition) de cada ação cognitivo-
motora, para posterior construção de vários tipos e modelos de interface cérebro-

MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
máquina, interface cerebro-computador, interface cérebro-computador-cérebro e
outras. (NICOLELIS, LEBEDEV, 2009)
Entretanto, o caráter altamente invasivo desta metodologia ganhou grande
crítica internacional, fazendo com que os mesmos grupos de pesquisa que utilizavam
ate então este procedimento, pouco a pouco migrassem para o uso de interface
cerebro-computador não invasiva.
Este projeto utiliza um modelo de ICC não invasiva da marca Emotiv Epoc,
de baixo custo (aproximadamente 700 dólares).
Por outro lado, a tecnologia de construção de próteses biônicas vem crescendo
nas últimas décadas, principalmente devido ao exponencial avanço nas áreas das
engenharias da computação, eletrônica e mecânica ou, mais apropriadamente, na
engenharia mecatrônica. (VENTIMIGLIA, 2012)
Atualmente, técnicas de construção mecânica como a prototipagem em 3D vem
possibilitando grande diminuição nos custos de tais próteses. Neste sentido, algumas
iniciativas internacionais tem sido desenvolvidas, citando, por exemplo o projeto ‘The
Open Hand Project’.
Contudo, outro problema se impõe quanto ao uso da maioria destas próteses,
além do altíssimo custo (algumas chegam a custar 100 mil dólares), que é a
dificuldade em sua utilização, pois em alguns casos demanda-se um tempo longo de
treino da musculatura e nervos residuais num indivíduo com determinado nível de
amputação.
Este problema, entretanto, poderia ser minimizado e solucionado através do
uso de uma ICC para se efetuar o comando elétrico cerebral (neuronal) direto
(CHENG, CHING, 2009). Uma ICC do tipo Emotiv Epoc possibilita o uso de técnicas
de imageria mental e de padrões de reconhecimento até mesmo por pessoas cegas
(VIVEIROS, 2013), já que tal treino cognitivo exige o recrutamento de funções neurais
do tipo ‘feedback visuomotor’.
OBJETIVO GERAL
Desenvolvimento de uma prótese de membro superior (mão biônica) de baixo
custo controlada por uma interface cerebro-computador.

MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
DESENVOLVIMENTO
Na Figura 1 apresenta-se o funcionamento completo do sistema de automação
da mão biônica. Assim, a ICC Emotiv Epoc lê, interpreta e compila os dados elétricos
neuronais provenientes do cerebro humano, por intermedio do software do ‘Panel
Control’, concomitante ao funcionamento deste software, outro programa
‘EmoComposer’ compila e executa os comandos neurais para comunicação com o
software desenvolvido para a pesquisa, que faz a intermediação ou interfaceamento
com esta parte e consequentemente com o controle dos servomotores contidos na
mão biônica.
Figura 1 – Diagrama esquemático de automação da mão biônica através da interface
cerebro-computador
Fonte: Elaborado pelos autores, 2015
METODOLOGIA
Materiais e métodos
A metodologia do treino cognitivo de imageria mental segue protocolos
definidos por Nicolelis e Lebedev (2009), pelo protocolo Ecolig aplicado por Miguel
(2010), e o mesmo protocolo empregado por Viveiros (2013). Basicamente, esta
metodologia envolve uso de padrões do eletroencefalograma (EEG) e ritmos cerebrais
via software 3dBrainVisualizer, decodificados pelo software TestVBench (aquisição de

MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
sinal analógico e transformação para sinal digital via transformada de Fourier),
formatação de protocolos de comunicação utilizando o software Panel Control e
Emokey e estabelecimento de interface com o software do Arduino, via linguagem
C++.
A interpretação dos dados neurocognitivos (EEG e ritmos cerebrais Alpha,
Beta, Delta e Theta) foram realizados pelo software LabChart (ADInstruments).
RESULTADOS PRELIMINARES
Basicamente foram obtidos três resultados:
1o: Construção de três modelos de próteses, de acordo com a demanda técnica de
cada fase do projeto (Figuras 2, 3 e 4).
2o: Construção de um software de controle do microcontrolador Arduino e a ICC
Emotiv Epoc;
3o: Construção de programação para automação da mão biônica.
Protótipo 1
Este protótipo foi desenvolvido para estudo do processo de automação via
microcontrolador Arduino. Na Figura 2 vemos o protótipo sendo apresentado na 11ª
Semana da Engenharia do Unisalesiano (Outubro de 2014).
Figura 2 – Primeiro protótipo desenvolvido, acionado pelo microcontrolador Arduino
Fonte: Elaborado pelos Autores, 2014
Nesta fase foram executados os primeiros testes com acionamento dos
servomotores para controle do movimento dos dedos, necessários para se processar

MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
a programação necessária para automação.
Protótipo 2
Desenvolvido em material acrílico, este modelo já foi ergonomicamente
projetado, fundamentado em medidas antropométricas de um dos acadêmicos
pesquisadores.
Figura 3 – Montagens do protótipo em acrílico
Fonte: Elaborado pelos autores, 2015
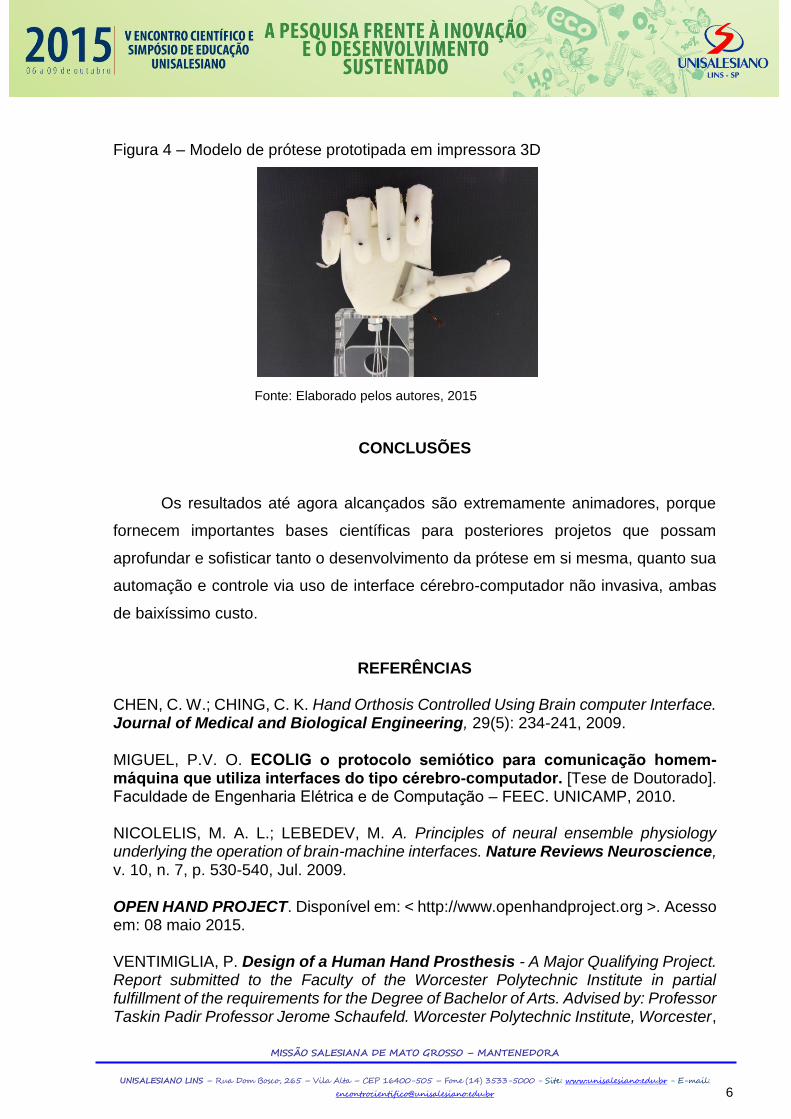
Protótipo 3
Este protótipo final foi confeccionado em material ABS numa impressora de
prototipagem em 3D.
MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
Figura 4 – Modelo de prótese prototipada em impressora 3D
Fonte: Elaborado pelos autores, 2015
CONCLUSÕES
Os resultados até agora alcançados são extremamente animadores, porque
fornecem importantes bases científicas para posteriores projetos que possam
aprofundar e sofisticar tanto o desenvolvimento da prótese em si mesma, quanto sua
automação e controle via uso de interface cérebro-computador não invasiva, ambas
de baixíssimo custo.
REFERÊNCIAS CHEN, C. W.; CHING, C. K. Hand Orthosis Controlled Using Brain computer Interface. Journal of Medical and Biological Engineering, 29(5): 234-241, 2009. MIGUEL, P.V. O. ECOLIG o protocolo semiotico para comunicacao homem- maquina que utiliza interfaces do tipo cerebro-computador. [Tese de Doutorado]. Faculdade de Engenharia Eletrica e de Computacão – FEEC. UNICAMP, 2010. NICOLELIS, M. A. L.; LEBEDEV, M. A. Principles of neural ensemble physiology underlying the operation of brain-machine interfaces. Nature Reviews Neuroscience, v. 10, n. 7, p. 530-540, Jul. 2009. OPEN HAND PROJECT. Disponível em: < http://www.openhandproject.org >. Acesso em: 08 maio 2015. VENTIMIGLIA, P. Design of a Human Hand Prosthesis - A Major Qualifying Project. Report submitted to the Faculty of the Worcester Polytechnic Institute in partial fulfillment of the requirements for the Degree of Bachelor of Arts. Advised by: Professor Taskin Padir Professor Jerome Schaufeld. Worcester Polytechnic Institute, Worcester,

MISSÃO SALESIANA DE MATO GROSSO – MANTENEDORA
UNISALESIANO LINS – Rua Dom Bosco, 265 – Vila Alta – CEP 16400-505 – Fone (14) 3533-5000 - Site: www.unisalesiano.edu.br - E-mail:
MA, Apr. 26, 2012. VIVEIROS, E. R. Mindware semiotico-comunicativo: aplicação didática no Ensino de Física para deficientes visuais utilizando uma interface cerebro-computador. [Tese de Doutorado]. Programa de Pós-graduacão em Educacão para a Ciência. Universidade Estadual Paulista Júlio de Mesquita Filho, UNESP, Bauru. 2013. 487f.