Deriving Situation-Adaptive Strategy for Stacking Containers in an Automated Container Terminal
24
PUSAN NATIONAL UNIVERSITY Deriving Situation-Adaptive Strategy for Stacking Containers in an Automated Container Terminal Taekwang Kim, Jeongmin Kim, and Kwang Ryel Ryu Pusan National University Dept. of Electrical and Computer Engineering 0
-
Upload
cyberlogitec -
Category
Business
-
view
177 -
download
0
Transcript of Deriving Situation-Adaptive Strategy for Stacking Containers in an Automated Container Terminal

PUSAN NATIONAL UNIVERSITY
Deriving Situation-Adaptive Strategy for Stacking
Containers in an Automated Container Terminal
Taekwang Kim, Jeongmin Kim, and Kwang Ryel Ryu
Pusan National University
Dept. of Electrical and Computer Engineering
0

Outline
• Automated Container terminal
• Stacking Policy
• Background and Previous Works
• Approach to Deriving Situation-Adaptive Strategy
• Case Study
• Experimental Results
• Conclusion
1
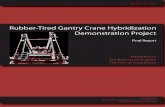
Automated Container Terminal
2
Enlarged view of a block part
tiers
Seaside
StackingYard
LandsideExternalTrucks
AGVs
QC
Seaside ASC
Seaside HP
Landside HP
Landside ASC
Quay
Quay Crane (QC)
Hinterland
Enlarged view of a block part
Stacking Yard
External Truck(ET)
Automated Stacking Crane
(ASC)
Automated Guided Vehicle(AGV)
Seaside Handover Point
(HP)
LandsideHandover Point
(HP)
Stack

Operations in Stacking Yard
• Crane interference occurs frequently because of the opposite
directions of container flow
• Determination of stacking position is one of the most important
operational problems in container terminals
3
Seaside HP
Landside HP
Loading Carry-in(Export)
Carry-outRehandling
Transshipment
Discharging(Import)
Repositioning

Stacking Policy
• Stacking policy takes account of various criteria to determine optimal
stacking positions in the stacking yards
• A good position should allow efficient operation not only at the time of
stacking but also at the time of retrieval
4
Stacking Policy
container 1. Request for a stacking location
3. An optimal stacking position
4. Stack
Stacking yard
2. Evaluate candidate positions

• Stacking policy based on single criterion [Duinkerken M. B., 2001]
[Dekker, R., 2006]
Background and Previous Works
5
Distance to the Handover Point
Category of a container (destination, weight, type)
Container type
(e.g. normal, reefer, dangerous goods)
Maximum stack height
Constraints

Background and Previous Works
• Stacking policy based on multiple criteria [Park, T., 2010a] [Park, T.,
2010b]
• Multiple criteria are taken into account simultaneously by a scoring function
of a weighted sum
x a candidate position
Ci i-th criterion
wi weight for the i-th criterion
• The position with the best score is selected
• Stacking policy is represented as a vector of the weight values
6
( ) ( )i ii
s x w C x

Background and Previous Works
• Stacking policy based on multiple criteria
• A policy consists of a set of rules for various container types
7

Background and Previous Works
8
• Stacking policy based on multiple criteria
Example: s7 (R7) for repositioning export containers
s7(x) = w34DI(x) + w35DO(x) + w36H(x) + w37E(x) + w38T(x) + w39G(x) + w40S(x)
DI(x)The distance in number of bays from the current location of the target container to the candidate location x
DO(x) The distance from x to a seaside HP of the block
H(x) The height of the stack at x
E(x)Indicates whether or not the candidate location is an empty ground slot
T(x)Indicates whether or not the container at the top of the stack at xis a repositioned container
G(x)The estimated likelihood of causing rehandling if the target container is eventually put on x
S(x)The amount of reduction in empty ground slots after putting the target container on x

• Deriving a robust stacking policy using a Noise-Tolerant Genetic
Algorithm (NTGA) [Jang, H., 2012]
• An evaluation of a candidate strategy demands an extensive simulation of
container handling in a block
• A strategy good for one scenario may not be so for a different scenario
• NTGA is provided with a pool of scenarios for evaluation
• A candidate strategy is initially evaluated by using a random couple of
scenarios in the pool
• If the candidate later turns out to be critical, then it is evaluated more
thoroughly using more random scenarios in the pool
• Final strategy thus obtained is the one with the best average
performance on various situations
Background and Previous Works
9

Motivation
• Limitations of the previous works
• The strategy performs well on the average in a variety of situations
• The performance in a certain situation can be worse than that of the
strategy custom-designed for that particular situation
• What we want is a set of strategies that can take good care of a
variety of situations (or virtually any situation)
• How will that be possible?
• There exists not just a few discrete situations but an infinite number of
continuously varying situations
10

Basic Idea
• We can derive a small number of representative strategies each for a
particular situation
• Given a new situation, we can apply the representative strategies
probabilistically according to their relevancies to the current situation
• Strategies are stochastically applied in such a way that a strategy for a
situation closer to the current situation is applied with a higher probability
• As a situation can be represented by a set of features, the Euclidian
distance between any two situations is easily calculated
• The application probability of each strategy depends on the distance to the
current situation from the situation that the strategy is specialized for
11

Representation of a Situation
12
• Suppose there are m indicators to specify a situation
• Then a situation e can be represented as a hyper-rectangle in an m-
dimensional space:
e = ([a1 , b1 ], [a2 , b2 ], . . . , [am , bm ])
where [aj , bj ] with aj , bj R represents that the j-th indicator takes the
value within the specified interval
Example: One-dimensional case
When the occupancy rate of the target storage block is the only
indicator of a situation
elow = [0 , 0.4 ] situation with occupancy rate 40%
ehigh = [0.6 , 1.0] situation with occupancy rate 60%

Distance Measure
13
• The distance d(ei , ej ) between two situations ei and ej is defined as
Example: Distance in 2-D space
• Two indicators used:
– Occupancy rate
– Crane workload
• d(e1 , e2 ) is the distance between the
two nearest vertices
• The closeness (similarity) c(ei , ej ) between two situations ei and ej is
defined as 1 / d(ei , ej )
2/1
1
2
],[],[
)(min),(
,,
,,
m
k kk
baybax
ji yxd
kjkjk
kikik
ee
e1
e2
a1,1 b1,1 a2,1 b2,1
a2,2
b2,2
a1,2
b1,2
d(e1 , e2 )
Crane Workload
Occ
upan
cy R
ate

Scoring by Multiple Representative Strategies
14
• Let si be the scoring function specialized to situation ei
• Then the score sc (x) of a candidate stacking position x in the current
situation ec can be obtained by
where c(ec , ei ) is the closeness between ec and ei
• sc (x) can be viewed as the expected score of position x when each
scoring function si for ei is applied probabilistically in proportion to its
respective closeness c(ec , ei ) to ec
m
i ic
m
i iic
cc
xscxs
1
1
),(
)(),()(
ee
ee

Case Study
15
• The workload of the seaside crane is our only indicator of a situation
• The workload of the upcoming horizon can be estimated from the job
schedule
• We focus on stacking strategies for
el = [0 , vl ], when the crane workload is low
eh = [vh , ∞], when the crane workload is high
• Based on these two, we should be able to deal with any intermediate
situation in-between the two situations

Case Study
16
• How can we derive those representative strategies?
• We need simulation scenarios to derive strategies
• For an accurate evaluation of a candidate strategy, it should be tested for a
long enough period of container ‘in’s and ‘out’s at a block
(About 2 weeks of yard operations per scenario in our experiment)
• Can we derive each strategy separately?
• Log data from real container terminals show continuously changing
situations
• Simulation scenarios with constant crane workload may be generated only
artificially
• But, what are good values of vl and vh ?

Case Study
• Our solution:
• Use scenarios of continuously varying situations
• Search for the two strategies simultaneously
• Also search for good values of vl and vh
• Evaluation of a candidate pair of strategies:
• The two strategies are probabilistically applied during the simulation of a
scenario of container handlings in various situations
• Average AGV delay and ET waiting time are measured for each simulation
min (w1 DAGV + w2 TET ) (w1 : w2 = 50 : 1)
17
Indicators Strategies
el eh sl sh
vl vh wl,1 wl,2 … wl,k wh,1 wh,2 … wh,k

Experimental Setting
18
Simulation Scenario
Loading Jobs 150 ~ 170 containers loaded per day
Discharging Jobs 150 ~ 170 containers discharged per day
Transshipment 80%
Duration of Simulation 10 days of initialization + 5 days of evaluation
Average Occupancy Rate 65%
Number of Scenarios 100 for learning, 100 for testing
NTGA Setting
Population size 100
Number of Evaluations 100,000

• Performance on 100 test scenarios:
• The t-test has shown that the difference is statistically significant
Experimental Results
19
vl(sec)
vh(sec)
Average AGV delay(sec)
Average ET waiting (sec)
Pair of Strategies withOptimal vl and vh
118.9 1984.0 42.30 105.80
Pair of Strategies withHand-picked vl and vh
1500.0 2400.0 47.36 114.68
Single Strategy withBest Overall Performance
- - 44.65 130.98

• Comparison of the two representative strategies:
• Stacking locations of the discharged containers
• When the workload is low, the seaside crane tries hard to move as
many discharged containers to the landside positions as possible
Experimental Results
20
Low Workload
High Workload
Se
asi
de Landsid
e
Average Travel Distance: 25.7
Average Travel Distance: 5.5

Experimental Results
• Comparison of the two representative strategies:
• Stacking locations of the export containers
• When the workload is low, the landside crane can move the export
containers at positions nearer to the seaside without interference
21
Se
asi
de
Low Workload
Average Travel Distance: 42.3
High Workload
Average Travel Distance: 13.8
Landsid
e

Conclusion
• Previous methods derive a single strategy that shows overall best
performance in a variety of situations
• But the performance in a certain situation can be worse than that of
the strategy custom-designed for that particular situation
• We have proposed to derive a set of a few representative strategies
each for a particular (extreme) situation
• Given a new situation, we can apply the representative strategies
probabilistically according to their relevancies to the current situation
• A case study with the workload of the seaside crane as a sole
indicator of a situation has shown that a pair of good representative
strategies can be derived that works significantly better than a single
overall best strategy
22

Q&A
23
Thank you