Deber 7-cap-2-matlab-nise
33
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE ING. EN ELECTRÓNICA E INSTRUMENTACIÓN SISTEMAS DE CONTROL Unidad I DEBER 4 TEMA: Ejercicios de MATLAB del Capítulo II del Libro Sistemas de Control para la Ingeniería de Norman Nise. Hrs. de la asignatura 4 Hrs Catedrático: Ing. Franklin Silva Estudiantes: Pogo Rai
-
Upload
alex-porras -
Category
Engineering
-
view
226 -
download
4
Transcript of Deber 7-cap-2-matlab-nise

DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICACARRERA DE ING. EN ELECTRÓNICA E INSTRUMENTACIÓN
SISTEMAS DE CONTROL
Unidad I
DEBER 4
TEMA: Ejercicios de MATLAB del Capítulo II del Libro Sistemas de Control para la Ingeniería de Norman Nise.
Hrs. de la asignatura 4 Hrs
Catedrático:Ing. Franklin Silva
Estudiantes:Pogo RaiSásig EdisonTobar Emily
Fecha de entrega: 09 de Junio del 2015

Sistemas de Control Ing. Franklin Silva Página 2

UNIVERSIDAD DE LAS FUERZAS ARMADAS – ESPE EXTENSIÓN LATACUNGA
CARRERA DE ELECTRÓNICA E INSTRUMENTACIÓNSistemas de control
TEMA: Ejercicios de MATLAB del Capítulo II del Libro Sistemas de Control para la Ingeniería de Norman Nise.
OBJETIVOS:
General:Resolver los ejercicios de MATLAB del Capítulo II del Libro Sistemas de Control para la Ingeniería de Norman Nise.
Específicos:1. Aplicar los conocimientos obtenidos en el Capítulo II del Libro Sistemas de
Control para la Ingeniería de Norman Nise en la resolución de ejercicios en MATLAB.
2. Aprender acerca de nuevos comandos a utilizarse para la resolución de dichos ejercicios.
3. Realizar un programa general para la resolución de ejercicios con función de transferencia.
RESUMEN:El presente informe contiene ejemplos de resolución de ejercicios con función de transferencia, obtención de las raíces de un sistema, representación de polinomios y conversión a un sistema LTI, entre otros temas tratados en el Capítulo II del libro de Sistemas de Control para la Ingeniería de Norman Nise utilizando distintos comandos y funciones de MATLAB.
ABSTRACT:This report contains examples of solving exercises with transfer function, obtaining roots of a system, representation of polynomials and conversion to LTI system, among other topics covered in Chapter II of the book Control Systems Engineering Norman Nise using different commands and functions MATLAB.
MARCO TEÓRICO
Sistemas de Control Ing. Franklin Silva Página 3

La utilización de laboratorios virtuales nos ayuda en la comprensión y resolución de una innumerable cantidad de problemas que van desde sencillos ejercicios matemáticos hasta cuestiones aplicables a la vida real; también nos son de mucha ayuda al momento de comprobar datos y tomar una decisión respecto a una situación específica. MATLAB es uno de los diversos programas que nos permiten realizar este tipo de simulaciones y pruebas, cuenta con una gran cantidad de herramientas y funciones que pueden ser utilizadas en diversas aplicaciones.CONTROL SYSTEM TOOLBOX: Es un conjunto de rutinas de MATLAB que ofrece algoritmos estándar de la industria y aplicaciones para el análisis sistemático y el diseño de los sistemas de control lineal. Puede especificar el sistema como una función de transferencia, espacio de estado, cero-polo-ganancia o modelo de respuesta en frecuencia. Aplicaciones y funciones, como respuesta al escalón y de Bode, permiten visualizar el comportamiento del sistema en el dominio de tiempo y frecuencia. Puede ajustar los parámetros del compensador sintonizar utilizando ajuste del regulador automático de PID, la formación de bucle Bode, método del lugar de raíces, diseño LQR / LQG, y otras técnicas interactivas y automatizadas. Puede validar su diseño mediante la verificación de tiempo de subida, el exceso, el tiempo de establecimiento, la ganancia y márgenes de fase, y otros requisitos. (SD, MathWorks)
Características principales Modelos de función de transferencia, espacio de estado, cero-polo-ganancia y
respuesta en frecuencia de sistemas lineales Serie, paralelo, la retroalimentación y conexión general de diagrama de
bloques de los modelos lineales Paso respuesta , Diagrama de Nyquist, y otras herramientas de dominio de
tiempo y dominio de la frecuencia para el análisis de las medidas de estabilidad y rendimiento.
Lugar de Raíces , diagramas de Bode , LQR, LQG, y otras técnicas de diseño de sistemas de control clásico y espacio de estado
La sintonización automática de controladores PID Conversión modelo de representación, modelo discretización de tiempo
continuo, y de orden inferior aproximación de los sistemas de orden superior. Algoritmos LAPACK y SLICOT optimizados para la precisión y el rendimiento
Sistemas de Control Ing. Franklin Silva Página 4

Figura N.-1Herramientas de Matlab
PROCEDIMIENTO PRÁCTICO
Ejercicios
Los estudiantes que están usando MATLAB debe ahora correr el ch2p1 hasta el ch2p8 del Apéndice B. Éste es su primer ejercicio MATLB. Aprenderán a usar MATLAB para:
1) Representar polinomios.2) Hallar raíces de polinomios.3) Multiplicar polinomio.4) Encontrar expansiones en fracciones parciales. Por último, el ejercicio 2.3 se resolverá
usando el MATLAB.
PROGRAMA CH2P1
Se usarán las cadenas de bits para identificar partes de este tutorial en la salida de su computadora. Las cadenas de bits se representan mediante el texto encerrado entre apóstrofos, tales como ‘ab’. Los comentarios se inician con el signo de % y MATLAB los ignora. Los números se ingresan sin ninguno otros caracteres. La aritmética se lleva a cabo mediante operadores aritméticos apropiados.
Sistemas de Control Ing. Franklin Silva Página 5

'(ch2p1)' %Desplegar etiqueta'Como estás?' %Mostrar cadena-3.96 %Mostrar el escalar -3.96-4+7i %Mostrar el número complejo -4+7i-5-6j %Mostrar el número complejo -5-6i(-4+7i)+(-5-6i) %Suma de dos números complejos%y mostrar la suma.(-4+7i)*(-5-6i) %Multiplicación de dos números complejos%y mostrar el productoM=5 %Asigna 5 a M y mostrar.N=6 %Asigna 6 a N y mostrar.P=M+N %Asigna M+N a P y mostrar.Pause
Sistemas de Control Ing. Franklin Silva Página 6

Figura N.-2Respuesta del corrido del programa ch2p1
PROGRAMA CH2P2
Los polinomios en s se pueden representar como vectores renglón que contienen los coeficientes. De esta manera P1=s3+7s2-3s+23 se puede representar mediante el vector que se muestra a continuación con os elementos separados mediante un espacio o coma. Se pueden usar la cadena de bits para identificar cada una de las secciones de este tutorial.
'(ch2p2)' %Desplegar etiquetaP1=[1 7 -3 23] %Almacenar polinomio s^3+7s^2-3s+ %23 como P1 y mostrar.
Figura N.-3Respuesta del corrido del programa ch2p2
PROGRAMA CH2P3
Ejecutar las declaraciones anteriores hace que MATLAB muestre los resultados. El terminar un comando con un punto y coma suprime la exhibición de los resultados. Al escribir una expresión sin asignación en el primer miembro y sin punto y coma hace que la expresión sea evaluada y despliegue el resultado.
'(ch2p3)' %Desplegar etiqueta
Sistemas de Control Ing. Franklin Silva Página 7

P2=[3 5 7 8]; %Asigna 3s^3+5s^2+7s+8 a P2 %sin despliegue.3*5 %Evaluar 3*5 y desplegar el resultado.
Figura N.-4Respuesta del corrido del programa ch2p3
PROGRAMA CH2P4
Una función F(s) en forma factorizada se puede representar en forma polinomial. De este modo P3=(s+2) (s+5) (s+6) se puede transformar en un polinomio usando el comando poly (V), done V es un vector renglón que contiene las raíces del polinomio y poly (V) forma los coeficientes del polinomio.
'(ch2p4)' %Desplegar etiquetaP3=poly([-2 -5 -6]) %Asigna 3s^3+5s^2+7s+8 a P2 %sin despliegue.3*5 %Evaluar 3*5 y desplegar el resultado
Figura N.-5Respuesta del corrido del programa ch2p4
PROGRAMA CH2P5
Sistemas de Control Ing. Franklin Silva Página 8

Se puede determinar las raíces mediante el comando roots (V). Las raíces se regresan como una vector columna. Por ejemplo, encuentre las raíces de 5s4+7s3+9s2-3s+2=0.
'(ch2p5)' %Desplegar etiquetaP4=[5 7 9 -3 2] %Forma 5s^4+7s^3+9s^2-3s+2 y despliegarootsP4= roots(P4) %sin despliegue. %Determinar las raices 5s^4+7s^3+9s^2-3s+2, %Asigna a rootsP4, y despliegapause
Figura N.-6Respuesta del corrido del programa ch2p5
PROGRAMA CH2P6
Dos polinomios se pueden multiplicar entre si al usar el comando conv(a,b) (lo que significa convolución). De esta manera, P5=(s3+7s2+10s+9)(s4-3s3+6s2+2s+1) se genera como sigue:
'(ch2p6)' %Desplegar etiquetaP5=conv([1 7 10 9],[1 -3 6 2 1]) %Forma (s^3+7s^2+10s+9)(s^4-3s^3+6s^2+2s+1), asignar a P5 y despliega.
Sistemas de Control Ing. Franklin Silva Página 9

Figura N.-7Respuesta del corrido del programa ch2p6
PROGRAMA CH2P7
La expansión en fracciones parciales para F(s)= b(s)/a(s) se puede encontrar usando el comando [K, p, k]= residue (b, a) (K= residuo; p= raíces del denominador, k= coeficiente directo, lo cual se encuentra mediante la división de los polinomios antes de realizar la expansión en fracciones parciales). Como un ejemplo se expande F(s)=(7s2+9s+12)/[s(s+7)(s2+10s+100)].
'(ch2p7)' %Desplegar etiquetanumf=[7 9 12]; %Definir el numerador de P(s)denf=conv(poly([0 -7]),[1 10 100]); %Definir el denominador de P(s)[K,p,k]=residue(numf, denf) %Encontrar los residuos y asignarlos
Sistemas de Control Ing. Franklin Silva Página 10

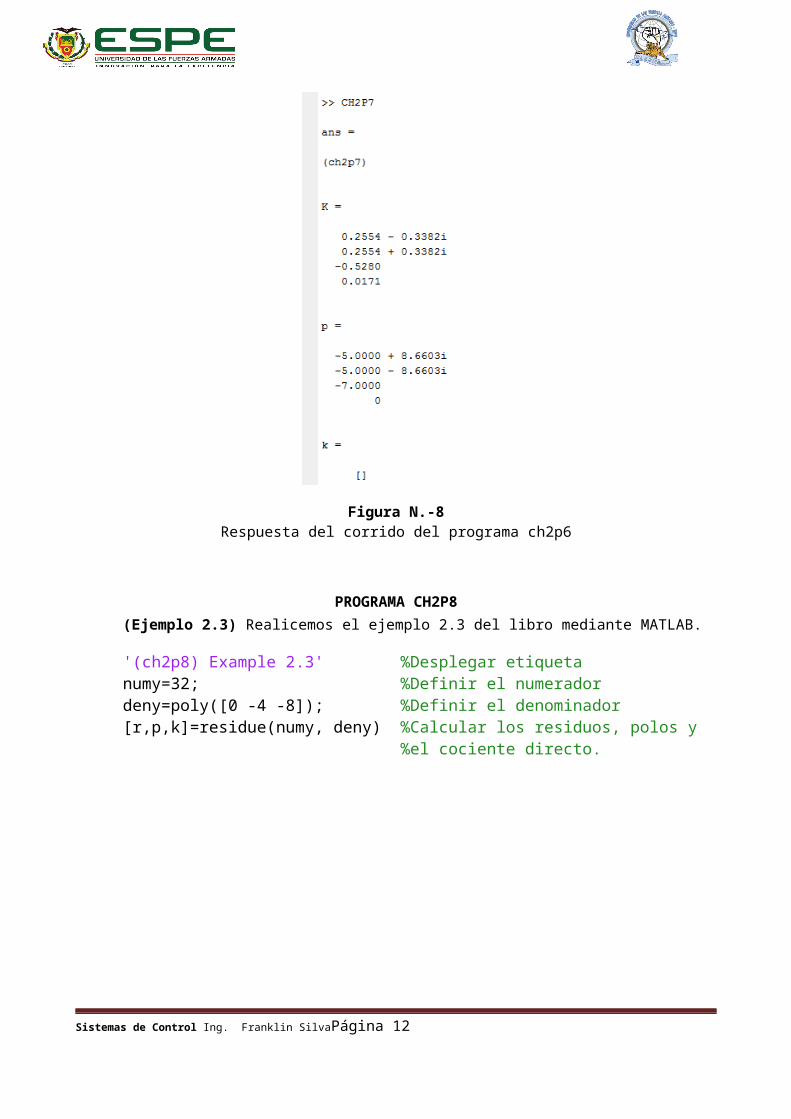
Figura N.-8Respuesta del corrido del programa ch2p6
PROGRAMA CH2P8(Ejemplo 2.3) Realicemos el ejemplo 2.3 del libro mediante MATLAB.
'(ch2p8) Example 2.3' %Desplegar etiquetanumy=32; %Definir el numeradordeny=poly([0 -4 -8]); %Definir el denominador[r,p,k]=residue(numy, deny) %Calcular los residuos, polos y %el cociente directo.
Figura N.-9Respuesta del corrido del programa ch2p8
Los estudiantes que trabajen los ejercicios en MATLAB, y deseen explorar las rutinas de matemáticas simbólicas (Symbolic Math Toolbox del MATLAB), deben correr el ch2sp1 y el ch2sp2 del Apéndice E. Aprenderán a construir objetos simbólicos y luego hallar las transformadas de Laplace y transformadas inversas de Laplace de funciones en la frecuencia y en el tiempo, respectivamente. Los ejemplos en el Caso 2 y Caso 3 de esta sección se resolverán usando las rutinas de matemáticas simbólica Symbolic Math Toolbox
PROGRAMA CH2SP1
Sistemas de Control Ing. Franklin Silva Página 11
Modelado en el dominio de la frecuencia
ch2sp1 El poder de cálculo de MATLAB se ve enriquecido ampliamente al usar las Rutinas de Matemáticas Simbólicas. En este ejemplo se demuestra su poder mediante el cálculo de transformadas inversas de F(s). El inicio de cualquier cálculo simbólico requiere definir los objetos simbólicos. Por ejemplo, la variable de transformada de Laplace, s, o la variable de tiempo, t, se deben definir como objetos simbólicos. La definición se realiza mediante el uso del comando syms. De esta manera syms s define s como un objeto simbólico; syms t define t como un objeto simbólico: syms s t define a s y t ambas como objetos simbólicos. Solamente se necesitan definir los objetos que entran al programa. Las variables producidas por el programa no necesitan definirse. De este modo, si se está determinando transformadas inversas de Laplace, solamente se necesita definir s como objeto simbólico, puesto que t resulta del cálculo. Una vez que se define el objeto, se puede escribir F como una función de s como se hace normalmente a mano.
No se tienen que usar vectores para representar el numerador y el denominador. Las transformadas de Laplace de funciones del tiempo también se pueden imprimir en MATLAB Command Window como normalmente se escriben. Esta forma se denomina impresión bonita. El comando es pretty (F), donde F es la función que se quiere imprimir en bonito. El siguiente código, usted puede ver la diferencia entre impresión normal e impresión bonita si usted corre el código sin los puntos y coma en los pasos donde las funciones, F o f, se definen. Una vez que F se define como F(s), se puede determinar la transformada inversa de Laplace al usar el comando Laplace (F). En el siguiente ejemplo se determinan las transformadas inversas de Laplace de las funciones de frecuencia en los ejemplos usados para los casos 2 y 3 en la sección 2.2 del libro
Caso 2:
F ( s)= 2( s+1 ) ( s+2 )2
=K1s+1
+K2
(s+2 )2+K3s+2
F ( s)= 2( s+1 ) ( s+2 )2
= 2s+1
− 2( s+2 )2
− 2s+2
f ( t )=(2e−t−2e−2 t−2 t e−2 t )u (t )
Caso 3:
F ( s)= 3s ( s2+2 s+5 )
=K1s
+K 2 s+K3s2+2 s+5
F ( s)= 3s ( s2+2 s+5 )
=35 (1s )−
35
(s+2 )
s2+2 s+5
f (t )=[ 35−35 e−t(cos (2t )+12sen (2 t ))]u(t )
Sistemas de Control Ing. Franklin Silva Página 12

'(chsp1)'; % Desplegar etiqueta syms s %Construir el objeto simbolico para la variable de laplace s'Transfomada inversa de Laplace';F=2/[(s+1)*(s+2)^2]; % Definir F(s) para el caso 2 del ejemplo 'F(s) from Caso 2'; %Desplegar etiquetapretty (F) %Impresion en bonio de F(s)f=ilaplace(F); %Determinar la trasfomada inversa de Laplace'f(t) for Caso 2'; %Desplegar etiqueta pretty (f) %Impresion en bonito de f(t) para el caso 2F=3/[s*(s^2+2*s+5)]; %Definir F(s) para el caso 3 ejemplo. 'f(t) for Caso 3'; %Desplegar etiqueta pretty (f) % Impresion en bonito de f(t) para el caso 3pause
Figura N.-10Respuesta del corrido del programa ch2sp1
PROGRAMA CH2SP2
ch2sp2 En este ejemplo se determina la transformada de Laplace de funciones del tiempo usando el comando laplace(f), donde f es una función del tiempo, f(t). Como un ejemplo se usan las funciones del tiempo que resultan de los casos 2 y 3 en la sección 2.2 en el texto y trabajamos en inverso para obtener sus transformadas de Laplace. Veremos que el comando Laplace(f) da F(s) en fracciones parciales. Además de la impresión bonita estudiada en el ejemplo anterior, las Rutinas de Matemáticas Simbólica contienen otros comandos que cambian la apariencia de los resultados desplegados para legibilidad y forma. Algunos de los comandos son collect(F), reúne los términos con coeficientes comunes de F; expand (F)-expande los productos de factores; factor(F) – factores de F; simple(F)- determina la forma más sencilla de F con el menor número de términos; simplify (F) – simplifica F; vpa (expresssion, palces) – quiere decir precisión aritmética variable; este comando convierte términos simbólicos fraccionarios en términos decimales con un número específico de decimales. Por ejemplo, la fracción simbólica 3/16 se convertirá en 0.1875 si el
Sistemas de Control Ing. Franklin Silva Página 13

argumento places fuera 4. En el siguiente ejemplo se determina la trasformada de Laplace de una función del tiempo. El resultado se despliega como fracciones parciales. Para combinar las fracciones parciales se usa el comando simplify(F), donde F es la transformada de Laplace de f(t) determinada a partir de laplace(f). Por último se usa F=vpa(F,3) para convertir las fracciones simbólicas a decimal en el resultado desplegado
'(ch2sp2)'; %Desplegar etiqueta syms t %Construir objeto simbolico para la variable de tiempo 'Transformada de Laplace';'f(t) from Case 2' ; %Desplegar etiqueta f=2*exp(-t)-2*t*exp(-2*t)-2*exp(-2*t); %Definir f(t) para el Caso 2 del ejemplopretty(f) %Imprimir en bonito f(t) para Caso 2 del ejemplo'F(s) for Case 2' ; %Desplegar etiquetaF=laplace (f); pretty (F) %Imprimir en bonito las fracciones parciales de F(s) para Cso 2F=simplify(F) %Combinar las fracciones parciales pretty(F) %Imprimir en bonito las fracciones parciales combinadas'f(t) for Caso 3' ; %Desplegar etiqueta f=3/5-3/5*exp(-t)*[cos(2*t)+(1/2)*sin(2*t)]; % Dwefinir f(t)pretty(f) %Imprimir en bonito f(t)'F(s) para el caso 3-Fracciones simbolicas' ;%Desplegar etiqueta F=laplace(f); %Determinar la transformada de Laplacepretty(F) %Imprimir en bonito las fraccion parciales'F(s) para el caso 3 - Representacion decimal';F=vpa(F,3); %Convertir fracciones numericas simbolicas a presentacion decimal de 3 cifras para F(s)pretty(F) %Imprimir en bonito las fracciones pariales combinadaspause
Figura N.-11Respuesta del corrido del programa ch2sp2_caso 2
Sistemas de Control Ing. Franklin Silva Página 14

Figura N.-12Respuesta del corrido del programa ch2sp2_caso3
Los estudiantes que están usando Matlab deben correr ahora el ch2p9 al ch2p11 del apéndice B. Aprenderán a usar Matlab para crear funciones de transferencia con numeradores y denominadores en polinomios o en forma factorizada. También aprenderán a convertir los polinomios y su forma factorizada
CH2P9 CREACIÓN DE FUNCIONES DE TRANSFERENCIA
Método vectorial, forma polinomial: Una función de transferencia se puede expresar como un polinomio del numerador entre el polinomio del denominador es decir F(s)=N(s)/D(s). El numerador N(s), se representa mediante un vector renglón, numf, que contiene los coeficientes de N(s). De manera similar el denominador D(s), se representa mediante un renglón denf, que contiene los coeficientes de D(s).
Método vectorial, forma factorizada: También se pueden crear funciones de transferencia LTI si el numerador y el denominador están expresados en forma factorizada. Esto se logra mediante el uso de vectores renglón que contienen las raíces del numerador y del denominador. De este modo G(s)=K*N(s)/D(s) expresado como G=zpk(numg,deng,K).
Método de la expresión racional en s, forma polinomial (Se requieren las Rutinas de Sistemas de Control 4.2): Este método permite escribir la función de transferencia como usted lo hace normalmente. La declaración s=tf(‘s’) debe preceder a la función de transferencia si se desea crear una función de transferencia LTI en la forma polinomial equivalente a que se tiene al usar G=tf(numg, deng).
Método de la expresión racional en s, forma factorizada (Se requieren las Rutinas de Sistemas de Control 4.2): Este método permite escribir la función de transferencia como usted lo hace normalmente. La declaración s=zpk(‘s’) debe preceder a la función de transferencia si se desea crear una función de transferencia LTI en la forma polinomial equivalente a que se tiene al usar G=zpk(numg, deng,K).
Sistemas de Control Ing. Franklin Silva Página 15

PROGRAMA CH2P9
'(ch2p9)' %Desplegar etiqueta'Método vectorial, forma polinomial' %Desplegar etiquetanumf=150*[1 2 7] %Almacenar 150(s^2+2s+7)denf=[1 5 4 0] %Almacenar s(s+1)(s+4)'F(s)' %Desplegar etiquetaF=tf(numf, denf) %Forma F(s) y despliegaclear %Limpia variablespause 'Método vectorial, forma factorizada'%Desplegar etiquetanumg=[-2 .4] %Almacena (s+2)(s+4)deng=[-7 -8 -9] %Almacena (s+7)(s+8)(s+9)K=20 %Definir K'G(s)' %Desplegar etiquetaG=zpk(numg,deng,K) %Forma G(s) y despliegaclear %Limpia variablespause 'Método de la expresión racional' %Desplegar etiquetas=tf('s') %Definir 's'P=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] %Forma F(s) como una %funcion de transferencia %LTI forma polinomialG=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] %Forma G(s) como una %funcion de transferencia %LTI forma polinomialclear %Limpia variablespause 'Método de la expresión racional, forma factorizada' %Desplegar etiquetas=zpk('s') %Definir 's'P=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] %Forma F(s) como una %funcion de transferencia %LTI forma factorizada.G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] %Forma G(s) como una %funcion de transferencia %LTI forma factorizada.pause
Sistemas de Control Ing. Franklin Silva Página 16

Figura N.-13Respuesta del corrido del programa ch2p9
Sistemas de Control Ing. Franklin Silva Página 17
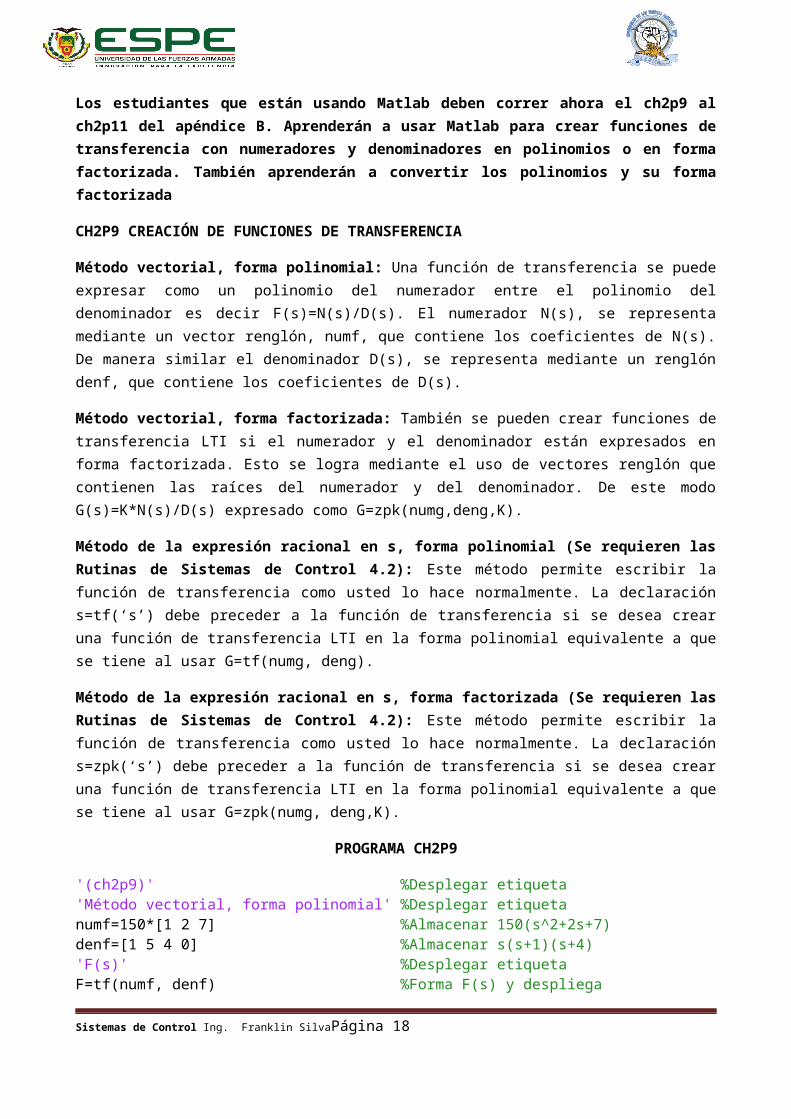
Figura N.-14Respuesta del corrido del programa ch2p9
Figura N.-15Respuesta del corrido del programa ch2p9
Sistemas de Control Ing. Franklin Silva Página 18

Figura N.-16Respuesta del corrido del programa ch2p9
PROGRAMA CH2P10
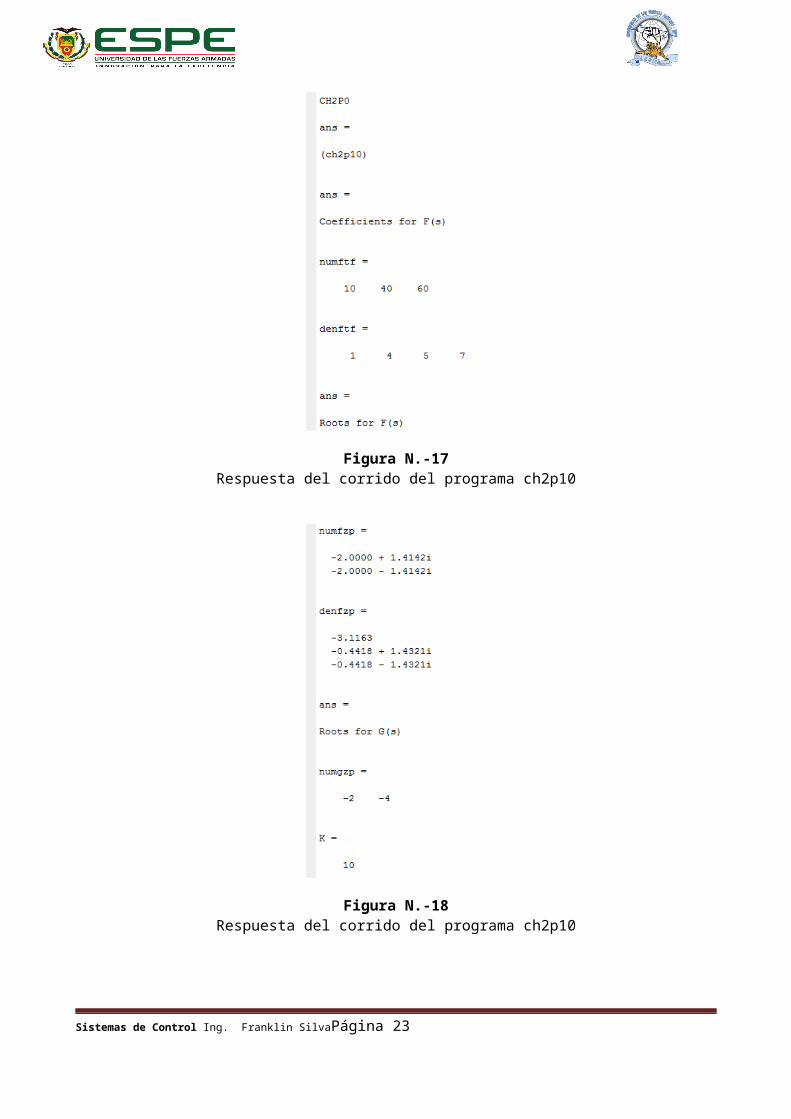
Los vectores del numerador y del denominador de la función de transferencia pueden convertir de la forma polinomial que contienen coeficientes y la forma factorizada que contienen raíces. La función de MATLAB tf2zp(numtf, dentf) convierte numerador y denominador de coeficientes a raíces.
'(ch2p10)' %Desplegar etiqueta'Coefficients for F(s)' %Desplegar etiquetanumftf=[10 40 60] %Forma numerador de F(s)denftf=[1 4 5 7] %Forma denominador de F(s)'Roots for F(s)' %Desplegar etiqueta[numfzp,denfzp]=tf2zp(numftf,denftf) %Convierte F(s) a forma %factorizada'Roots for G(s)' %Desplegar etiquetanumgzp=[-2 -4 ] %Forma numerador de G(s)K=10dengzp=[0-3 -5] %Forma denominador de G(s)'Coefficients for G(s)' %Desplegar etiqueta[numgtf,dengtf]=zp2tf(numgzp',dengzp',K) %Convierte G(s) a la forma %polinomial.
Sistemas de Control Ing. Franklin Silva Página 19

Figura N.-17Respuesta del corrido del programa ch2p10
Figura N.-18Respuesta del corrido del programa ch2p10
Sistemas de Control Ing. Franklin Silva Página 20

Figura N.-19Respuesta del corrido del programa ch2p10
PROGRAMA CH2P11
Los modelos LTI también se pueden convertir de la forma polinomial la forma factorizada. Los comandos de MATLAB tf y zpk se usan para la conversión entre modelos LTI. Si una función de transferencia Fzpk(s) se expresa como factores en el numerador y el denominador, entonces tf(Fxzpk) convierte a Fzpk(s) a una función de trasferencia expresada como coeficientes en el numerador y en el denominador. De modo similar, si la función de transferencia Ftf(s) se expresa como coeficientes en numerado y en denominador.
'(ch2p11)' %Desplegar etiqueta'Fzpk(s)' %Desplegar etiquetaFzpk1=zpk([-2 -4],[0 -3 -5],10) %Forma Fzpk1(s)'Ftf1' %Desplegar etiquetaFtf1=tf(Fzpk1) %Convierte Fzpk1(s) a %forma de coeficientes'Ftf2' %Desplegar etiquetaFtf2=tf([10 40 60],[1 4 5 7]) %Forma Ftf2(s)'Fzpk2' %Desplegar etiquetaFzpk2=zpk(Ftf2) %Convierte Ftf2(s) a %forma factorizada.
Sistemas de Control Ing. Franklin Silva Página 21
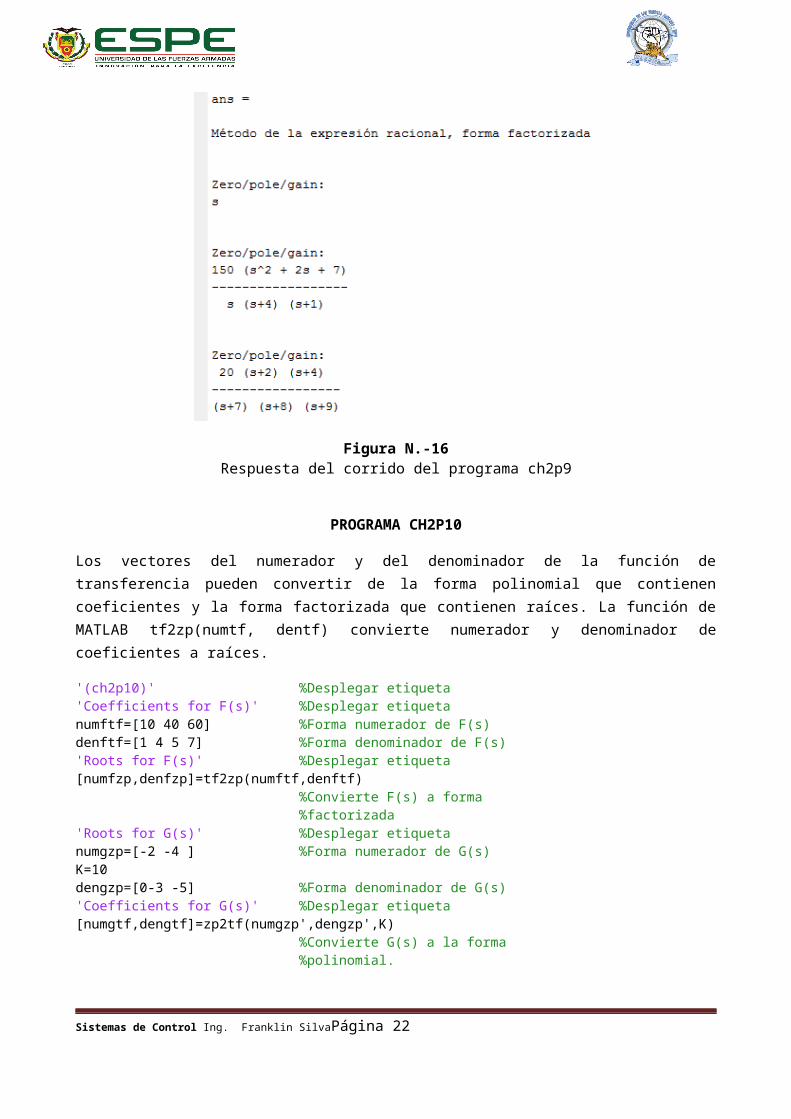
Figura N.-20Respuesta del corrido del programa ch2p11
Figura N.-21Respuesta del corrido del programa ch2p11
Sistemas de Control Ing. Franklin Silva Página 22
Los estudiantes que trabajan los ejercicios de Matlab y deseen explorar las rutinas, deben correr ahora el ch2sp3 del apéndice E .Aprenderán a usar las rutinas de matemática simbólica para simplificar la entrada de funciones de transferencia complicadas, así como mejorar su legibilidad. Aprenderá a introducir una función de transferencia simbólica y convertirla en un objeto lineal en invariante en el tiempo (LTI) como se presenta en el apéndice B, ch2p9.
PROGRAMA CH2SP3
Symbolic Math Toolbox de MATLAB se puede utilizar para simplificar la entrada de funciones de transferencia complicado como sigue: Inicialmente, la entrada de la función de transferencia, G (s) = numg / Deng, a través de declaraciones de matemáticas simbólicas. Entonces, convertir G (s) a una función de transferencia de objetos LTI. Esta conversión se realiza en dos pasos. El primer paso utiliza el comando [numg, deng] = numden (G) para extraer el numerador y el denominador simbólico de G. El segundo paso convierte, por separado, el numerador y el denominador de vectores mediante el sym2poly (S) del sistema, donde S es un polinomio simbólico. El último paso consiste en la formación de la función de transferencia de objetos LTI utilizando la representación vectorial de numerador y el denominador de la función de transferencia. A modo de ejemplo, formamos el objeto LTI, G (s) = [54 (s + 27) (S ^ 3 + 52s ^ 2 + 37s + 73)] / [s (s ^ 4 + 872s ^ 3 + 437s ^ 2 + 89s + 65) (s ^ 2 + 79s + 36)] haciendo uso de Symbolic Math Toolbox de MATLAB para la simplicidad y legibilidad
'(ch2sp3)' % visualizacion de etiquetasyms s % construya objeto simbolico para % variable de frecuencia's'.G=54*(s+27)*(s^3+52*s^2+37*s+73).../(s*(s^4+872*s^3+437*s^2+89*s+65)*(s^2+79*s+36)); % formar simbolo G(s).'Symbolic G(s)' % visualizacion de etiqueta.pretty(G) % impresion del simbolo G(s).[numg,deng]=numden(G); % extraer simbolo del numerador y denominador.numg=sym2poly(numg); % Formar vector para numerador de G(s).deng=sym2poly(deng); % Formar vector para denominador de G(s).'LTI G(s) in Polynomial Form' % visualizacion de etiqueta.Gtf=tf(numg,deng) % Formar y mostrar objetos para G(s) en % forma polinomica.'LTI G(s) in Factored Form' % visualizacion de etiqueta. Gzpk=zpk(Gtf) % Convertir G(s) en forma factorizada.
Sistemas de Control Ing. Franklin Silva Página 23

Figura N.-22Respuesta del corrido del programa ch2sp3
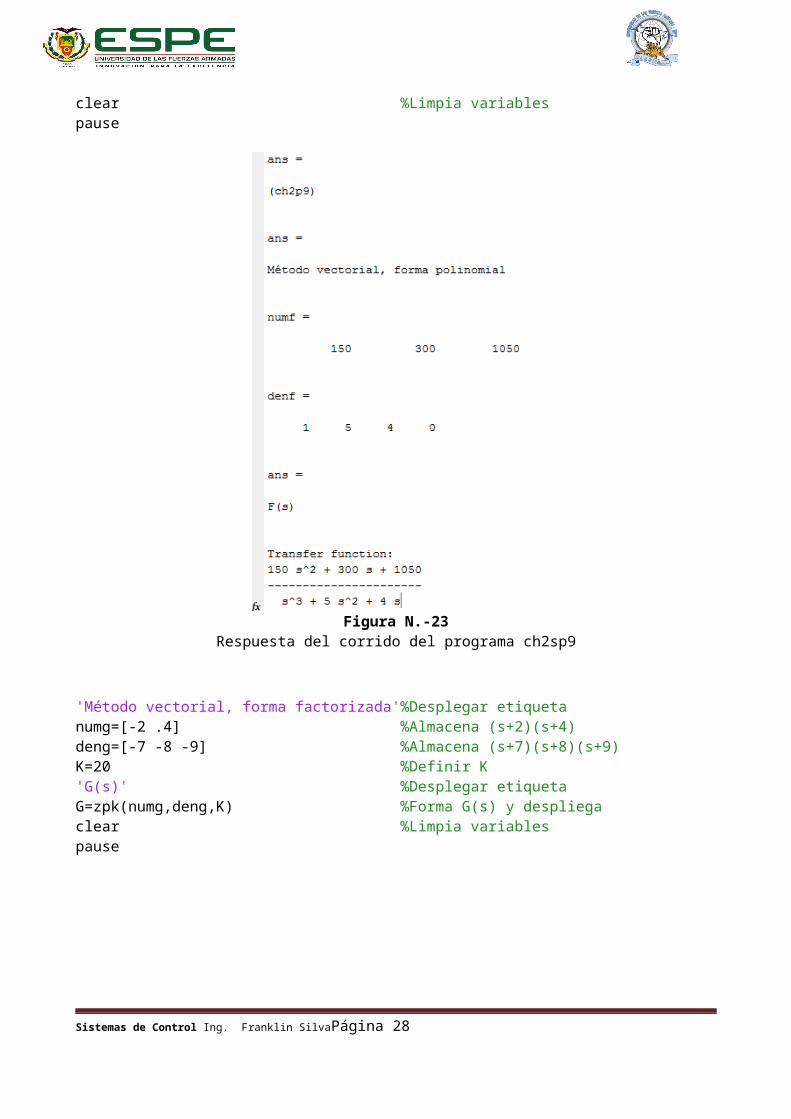
PROGRAMA CH2P9
'(ch2p9)' %Desplegar etiqueta'Método vectorial, forma polinomial' %Desplegar etiquetanumf=150*[1 2 7] %Almacenar 150(s^2+2s+7)denf=[1 5 4 0] %Almacenar s(s+1)(s+4)'F(s)' %Desplegar etiquetaF=tf(numf, denf) %Forma F(s) y despliegaclear %Limpia variablespause
Sistemas de Control Ing. Franklin Silva Página 24

Figura N.-23Respuesta del corrido del programa ch2sp9
'Método vectorial, forma factorizada'%Desplegar etiquetanumg=[-2 .4] %Almacena (s+2)(s+4)deng=[-7 -8 -9] %Almacena (s+7)(s+8)(s+9)K=20 %Definir K'G(s)' %Desplegar etiquetaG=zpk(numg,deng,K) %Forma G(s) y despliegaclear %Limpia variablespause
Sistemas de Control Ing. Franklin Silva Página 25

Figura N.-24Respuesta del corrido del programa ch2sp9
'Método de la expresión racional' %Desplegar etiquetas=tf('s') %Definir 's'P=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] %Forma F(s) como una %funcion de transferencia %LTI forma polinomialG=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] %Forma G(s) como una %funcion de transferencia %LTI forma polinomialclear %Limpia variables
pause
Sistemas de Control Ing. Franklin Silva Página 26

Figura N.-25Respuesta del corrido del programa ch2sp9
'Método de la expresión racional, forma factorizada' %Desplegar etiquetas=zpk('s') %Definir 's'P=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] %Forma F(s) como una %funcion de transferencia %LTI forma factorizada.G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] %Forma G(s) como una %funcion de transferencia %LTI forma factorizada.Pause
Figura N.-26Respuesta del corrido del programa ch2sp9
Los estudiantes que estén trabajando ejercicios de MATLAB, y deseen explorar la capacidad agregada de las rutinas de matemática simbólica del MATLAB, deben ahora correr el ch2sp4 del Apéndice E, donde está resuelto el ejemplo 2.10. Aprenderán a usar las rutinas de matemática simbólica para resolver ecuaciones simultaneas, usando la regla de Cramer, Específicamente, las rutinas de matemática simbólica se usaran para despejar la función de transferencia de la ecuación (2.82), utilizando las ecuaciones (2.80)
Sistemas de Control Ing. Franklin Silva Página 27
PROGRAMA CH2SP4
ch2sp4 (Ejemplo2.10) La Rutinas de Matemáticas Simbólicas de MATLAB se pueden usar para simplificar la solución de ecuaciones simultáneas mediante la regla de Cramer. Un sistema de ecuaciones simultaneas se pueden representar mediante Ax=B, donde A es una matriz formada por los coeficientes de las incógnitas en las ecuaciones simultaneas, x es el vector de incógnitas y B es un vector que contiene las entradas. La regla de Cramer establece que xk=det ( Ak ) /det ( A ) , donde Ak es la matriz formada al reemplazar la k-ésima columna de la matriz A con el vector de entrada B . En el texto, se denomina det(A) como delta. En MATLAB, las matrices se escriben con espacio o coma para separar los elementos para cada uno de los reglones. El siguiente reglón se indica con un punto y coma o retorno de carro.
La matriz completa está encerrada entre un par de paréntesis cuadrados. Al aplicar lo anterior a la solución del ejemplo 2.10 A=[(R1+L*s)-L*s; -L*s(L*s+R2 +(1/(C*s)))] y Ak=[(R1+L*s) V;-L*s 0]. La función det(matrix) evalúa el determinante de una matriz cuadrada que se usa como argumento. Determinemos la función de transferencia, G (s )=I 2(s )/V ( s), solicitada en el ejemplo 2.10. El comando simple(s), donde s es una función simbólica, se introduce en la solución. El comando simple(s) simplifica la solución al reducir la longitud de s. El uso de simple(s) simplifica la solución al reducir la longitud de s. El uso de simple (I2) reduce la solución al combinar potencias iguales de la variable de Laplace, s
Ejemplo 2.10
Funcione transferencia y lazos múltiples
Problema
Dada la red de la figura 2.6a, encuentre la función de transferencia I 2(s) /V (s)
Figura N.-27Circuito RLC
[V ( s )0 ]=[Ls+R1 −Ls
−Ls Ls+R2+1sC ][ I 1 ( s )
I 2 ( s )]
Sistemas de Control Ing. Franklin Silva Página 28

I 2 ( s)=|Ls+R1 V ( s )−Ls 0 |
|Ls+R1 −Ls
−Ls Ls+R2+1sC|
=LsV (s )
L2 s2+R2 Ls+LC
+R1Ls+R1R2+R1sC
−L2 s2
I 2 (s )V (s )
= LC s2
(R1+R2 ) Ls2C+(R1R2C+ L ) s+R1
Figura N.-28Respuesta del corrido del programa ch2sp4
ANLISIS DE RESULTADOS
En la resolución de ecuaciones no homogéneas que implican funciones discontinuas, las transformadas de Laplace es la única herramienta que tenemos a nuestra disposición y MATLAB ayuda a resolver toda el álgebra que implica el uso de este método.MATLAB utiliza matemática simbólica para poder reducir funciones de transferencia complicadas y dejarlas expresadas lo cual facilita nuestro trabajo.
CONCLUSIONES
Matlab es una herramienta que facilita el cálculo de Laplace mediante comandos predeterminados.
La mayor parte de problemas se deben resolver de manera simbólica antes de poder reemplazar valores y obtener resultados, por esta razón MATLAB posee una herramienta de matemática simbólica la cual permite resolver funciones de transferencia muy complicadas.
Sistemas de Control Ing. Franklin Silva Página 29

RECOMENDACIONES Se debe declarar variables fáciles de recordar para así evitar errores al
momento de la compilación del programa para su ejecución.
BIBLIOGRAFÍA[1] Nise, N. (2006). Sistemas de control para ingeniería (Tercera Edición ed.).
México: Editorial Continental.
Sistemas de Control Ing. Franklin Silva Página 30