Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)

of 10
Transcript of Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
1/10
2126 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 49, NO. 5, SEPTEMBER/OCTOBER 2013
Deadlock Avoidance in Model PredictiveDirect Torque Control
Thomas Burtscher and Tobias Geyer, Senior Member, IEEE
Abstract For medium-voltage ac drives, model predictive di-rect torque control (DTC) (MPDTC) shows excellent performancecharacteristics regarding the switching frequency and the har-monic distortion of the torque and the stator currents, outper-forming classic control schemes such as DTC and eld-orientedcontrol. Aside from these advantages, the MPDTC algorithmruns occasionally into the so-called deadlocks, in which no suit-able voltage vector exists, similar to DTC. Even though an exitstrategy is available to resolve these situations, deadlocks tend tocause spikes in the instantaneous switching frequency and impactthe overall performance of MPDTC. This paper focuses on newmethods to avoid such deadlocks, using terminal constraints and
terminal weights. The proposed methods greatly reduceand, inmany cases, completely avoiddeadlocks. Moreover, in the caseof a ve-level topology, a signicant reduction of the switchingfrequency and the harmonic distortion is observable.
Index Terms Medium-voltage drives, model predictive control(MPC), model predictive direct torque control (DTC) (MPDTC).
I. INTRODUCTION
T HE increasing computational power available today facil-itates the application of model predictive control (MPC)[1] to power electronic systems [2], [3], where the samplingintervals are typically below 100 s. Two different ways of using MPC for power electronics can be observed. In the rstapproach, the current control loop of eld-oriented control [4]is replaced by MPC while keeping the modulator [5]. In thesecond approach, also the task of the modulator is accomplishedby the MPC algorithm, which manipulates the inverter switchpositions directly and refrains from using a modulation scheme.This approach leads to the concept of predictive current control,see, e.g., [6] and [7], and model predictive direct torque control(DTC) (MPDTC) [2], [8], [9]. MPDTC can be considered as anadvancement of DTC [10], in which the lookup table is replacedby an online optimization stage. Specically, the electromag-netic torque, stator ux magnitude, and inverter states are kept
Manuscript received October 22, 2012; accepted January 17, 2013. Date of publication May 2, 2013; date of current version September 16, 2013. Paper2012-IDC-580, presented at the 2012 IEEE Energy Conversion Congress andExposition, Raleigh, NC, USA, September 1520, and approved for publicationin the IEEE T RANSACTIONS ON INDUSTRY A PPLICATIONS by the IndustrialDrives Committee of the IEEE Industry Applications Society. The work of T. Geyer was supported by a research grant from ABB Switzerland.
T. Burtscher is with ABB MV Drives, 5300 Turgi, Switzerland (e-mail:[email protected]).
T. Geyer is with ABB Corporate Research Center, 5405 Baden-Dttwil,Switzerland (e-mail: [email protected]).
Color versions of one or more of the gures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identier 10.1109/TIA.2013.2261445
within their respective bounds, while the switching frequencyof the inverter is minimized.
Aside from MPDTCs signicant performance improve-ments regarding the switching frequency, switching losses, andharmonic distortion when compared to classic DTC [9], theMPDTC algorithm tends to run occasionally into infeasiblestates, the so-called deadlocks [11]. These deadlocks occur forcombinations of stator and rotor ux vectors, inverter states,and hysteresis bounds, for which no sequence of inverter switchpositions exists that keeps the controlled variables within their
respective bounds.In case of a deadlock, one option is to relax the hysteresisbounds and to minimize the predicted violation of the hysteresisbounds rather than the switching frequency [11]. This so-calledinfeasibility exit strategy is executed until the deadlock has beenresolved. However, the execution of this exit strategy oftenleads to a spike in the instantaneous switching frequency, towhich we refer to as a switching burst . In the worst case, suchswitching bursts could lead to a trip of the drive.
This paper proposes new methods that aim at avoiding dead-locks and, thus, the triggering of the infeasibility exit strategy.The proposed methods are based on the notion of terminalweights and terminal constraints [1]. As a result, the occurrenceof deadlocks is drastically reduced and in many cases avoidedaltogether, as demonstrated for a three-level neutral point (NP)-clamped (NPC) inverter. In addition to that, for a ve-leveltopology [12], signicant reductions of the switching frequencyas well as of the harmonic distortions of the torque and statorcurrents are also achieved.
This paper is organized as follows. Section II summarizesthe concept of MPDTC. In Section III, the occurrence of deadlocks is analyzed in detail, whereas new deadlock avoid-ance strategies are proposed in Section IV. Sections V and VIprovide performance results of the introduced deadlock avoid-ance strategies for three- and ve-level topologies, respectively.
Conclusions are drawn in Section VII.
II. MPDTC
MPDTC was proposed in [2], presented in detail in [8] and[11] and generalized in [9]. Branch and bounds methods wereadded in [13] to reduce the computational burden by aboutan order of magnitude. At steady-state operation, MPDTCprovides switching losses and current distortions similar to theones typically achieved by optimized pulse patterns [14], whileduring transients, its dynamic response is as fast as the one of DTC [15].
0093-9994 2013 IEEE
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
2/10
BURTSCHER AND GEYER: DEADLOCK AVOIDANCE IN MODEL PREDICTIVE DIRECT TORQUE CONTROL 2127
Fig. 1. NPC inverter driving an IM.
TABLE I(L EF T ) R ATED VALUES AND ( R IGHT ) PARAMETERS OF THE NPC
INVERTER D RIVE S YSTEM
This section provides a brief summary of the MPDTC ap-proach based on the aforementioned literature and the notationused therein. The drive system initially used as a case studyis assumed to consist of a three-level NPC inverter [16] with amedium-voltage squirrel-cage induction machine (IM). The NPpotential of the inverter oats. Fig. 1 shows the topology of theinverter. The parameters of the drive system are summarized
in Table I.
A. Prediction Model
The prediction model is formulated in the stationary orthog-onal coordinate system. The models state vector is denedas x = [s s r r vn ]T , with s and s denoting the and components of the stator ux linkage, while r andr refer to the components of the rotor ux. The potential of the NP is given by vn .
The three-phase switch positions ua , ub , u c constitute the in-put vector u = [ua ub uc ]T {1, 0, 1}3 . The electromagnetictorque T e , the stator ux magnitude s = 2s + 2s , andthe NP potential vn form the output vector y = [T e s vn ]T .
Combining the standard dynamical motor model of anIM with the model of the NP potential, as presented in[8, Sec. II], and using the forward Euler approximation ap-proach, a discrete-time drive model in state-space form can bederived, which is of the form
x (k + 1) = Ax (k) + Bu (k) (1)
y (k) = g (x (k)) (2)
and uses the sampling interval T s = 25 s. The denition of thematrices A and B and vector g can be found in [8, Appendix].
B. Optimization Problem
The control problem is to keep the machines torque andstator ux magnitude as well as the inverters NP potentialwithin given (hysteresis) bounds around their respective ref-erences. The switching losses in the semiconductors are to beminimized. An indirect way of achieving this is to minimize thedevice switching frequency. 1
Writing the aforementioned control problem as a closed-form optimization problem leads to
J (x (k), u (k 1)) = minU (k )
(J sw + J t ) (3a)
s.t . x ( + 1) = Ax ( ) + Bu ( ) (3b)y ( + 1) = g (x ( + 1)) (3c)y ( + 1) Y (3d)u ( ) U , u ( ) 1 (3e) = k, . . . , k + N p 1 (3f)
with J denoting the minimum of the objective function J =J sw + J t . The rst term of J captures the instantaneous switch-ing frequency
J sw = 1N p
k + N p 1
l= k u ( ) 1 (4)
with u ( ) = u ( ) u ( 1). The second term J t is anoptional term that will be introduced in Section IV.
The lower and upper bounds on the controlled variables formthe set Y = [T e , T e ] [s , s ] [vn , vn ], where T e (T e )refers to the lower (upper) torque bounds. The bounds on the
stator ux magnitude and NP potential are dened accordingly.The constraint (3e) limits the control input u to the integer
values U = { 1, 0, 1}3 available for the three-level inverter.Switching in a phase by more than one step up or down is notallowed to avoid a shoot-through. This restriction is enforcedby the second constraint in (3e), u ( ) 1, which limitsthe elements in u to 1. These constraints have to be met atevery time step within the prediction horizon. The sequenceof control inputs U (k) = [u T (k), . . . , u T (k + N p 1)]T overthe prediction horizon N p represents the sequence of inverterswitch positions that the controller decides upon. The objectivefunction (3a) is to be minimized for all U (k) subject to thedynamical evolution of the drive (3b), its outputs (3c), and theconstraints (3d) and (3e).
C. MPDTC Algorithm
An important part of the MPDTC algorithm is the so-calledswitching horizon, which consists of a certain chronological or-der of switching events S and extrapolation steps E. In thecase of the switching horizon SSE, for example, the algorithmhas the freedom to switch the input vector u at time steps kand k + 1 (SS) with respect to (3e). Thereafter, the secondinput vector u (k + 1) is locked in, and the controlled variablesy are extrapolated (E) for as long as the constraints (3d) are
1Alternatively, the switching losses can be directly targeted [9].
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
3/10
2128 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 49, NO. 5, SEPTEMBER/OCTOBER 2013
Fig. 2. Steady-state operation at nominal speed and torque of MPDTC for an NPC inverter with a medium-voltage IM. The switching horizon is SSE, and theswitching frequency is minimized. (a) Electromagnetic torque (in per unit). (b) Stator ux magnitude (in per unit). (c) NP potential (in percent).
satised. The time instant (3d) is violated dening the lengthof the prediction horizon N p . As a result, N p is not of xedlength as it is common for MPC but varies with the switchingsequences. Based on the switching horizon and the constraintsdened in (3), the MPDTC algorithm establishes all feasibleswitching sequences U (k) together with their corresponding
costs J and selects the sequence with the minimal cost.A detailed description of the generalized MPDTC algorithm
can be found in [9, Sec. III]. Fig. 2 shows an example of the waveforms of the three output variables over 20 ms atsteady-state operation and rated speed and torque, when usingthe switching horizon SSE. Throughout this paper, if nototherwise stated, SSE will be used.
III. O CCURRENCE OF D EADLOCKS
A. Denition of Deadlocks
An infeasible state is a state vector x (k) for which the
set of candidate switching sequences is empty at Step 3 of the MPDTC algorithm, as dened in [8]. This implies thatthere exists no switching sequence that is predicted to keepthe output variables within their bounds over the predictionhorizon, assuming that the output variables are within theirrespective bounds at time step k. Correspondingly, if outputvariables are outside of their bounds, there exists no candidateswitching sequence that reduces the bound violation at everytime step within the prediction horizon. A deadlock is thesituation in which an infeasible state arises. This implies thatthe control problem (3) is infeasible and cannot be solved.
B. Root Cause Analysis of DeadlocksDeadlocks are caused by the combination of the output
variables being constrained between upper and lower boundsand the fact that the switch positions are restricted to a nite anddiscrete-valued set. In order to characterize these deadlocks, themathematical analysis provided in [2], and [11] is summarizedhereafter. Based on the standard state-space equations of an IMand the expression for the electromagnetic torque, the followingapproximate equations can be derived:
dT edt
= 0 | r v | = Ts r (5)
d sdt
= 0 Ts v = 0 (6)
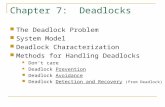
Fig. 3. Root cause of deadlocks. The set of discrete voltage vectors in the plane is enclosed by a circle, which contains all relaxed voltage vectors.The circle, together with the constant torque (red dash-dotted) line and theconstant stator ux magnitude (blue dotted) line, denes the hatched feasible
region. This region contains the relaxed voltage vectors that achieve the desiredcontrol command (increase torque and reduce stator ux magnitude). Since, inthis example, the feasible region contains no discrete-valued voltage vectors,the control problem is infeasible. This gure has been taken from [11].
where s = [s s ]T is the stator ux vector, r =[r r ]T is the rotor ux vector, is the rotors rotationalspeed, and v = [v v ]T denotes the voltage vector. Thelatter is obtained by the transformation of the three-phasevoltages v abc = [va vb vc ]T to the orthogonal coordinatesystem.
For a symmetrical and sinusoidal three-phase system withconstant amplitude and frequency, the voltage vector that
achieves constant ux and torque rotates with the same fre-quency and a constant amplitude around the origin of thecomplex plane. We refer to this continuous-valued vectoras the relaxed voltage vector. For a converter system, however,only a nite number of discrete-valued voltage vectors areavailable. These are shown as black dots in Fig. 3, assuminga three-level inverter.
Considering the and components of the relaxed voltagevector as free variables, (5) describes a line in the planethat is parallel to the rotor ux vector. This line is referred toas the constant torque line. Voltage vectors that lie betweenthis line and the origin decrease the torque, and voltage vectorsbeyond this line increase it. Note that increasing the speed (and,therefore, the modulation index) shifts the constant torque lineaway from the origin and reduces the number of discrete-valued
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
4/10
BURTSCHER AND GEYER: DEADLOCK AVOIDANCE IN MODEL PREDICTIVE DIRECT TORQUE CONTROL 2129
voltage vectors. The control problem thus becomes harder tosolve.
Equation (6) describes a line in the plane that is perpen-dicular to the stator ux vector and intersects the origin. Thisline is referred to as the constant stator ux magnitude line.Voltage vectors that lie on the same side of this line as the
stator ux vector increase the stator ux magnitude, and voltagevectors that lie on the opposite side decrease it. Fig. 3 shows anexample of a typical deadlock situation based on the foregoingtheoretical considerations.
The previous analysis focused on the torque and stator uxmagnitude. When the NP potential is taken into account as well,a further restriction on the voltage vector is added. Each switchposition that corresponds to at least one phase connected to theNP has a particular inuence on it, depending on the sign of thephase current. Even if a voltage vector is available that satisesthe required control commands for the torque and the stator uxmagnitude, the corresponding switch position might lead to aviolation of the NP potentials bounds.
C. Location of Deadlocks in the State Space
As will be shown in this section, in case of the NPC inverter,deadlocks tend to occur in the following two cases.
1) The electromagnetic torque is close to its lower boundand needs to be increased, while the stator ux magnitudeis at its upper bound and is to be reduced, regardless of thevalue of the NP potential. We refer to these deadlocks asType M deadlocks, with M referring to the fact that onlythe two output variables of the machine give rise to thedeadlock.
2) The torque or the stator ux magnitude is at its lowerbound and needs to be increased, while the NP potentialis close to one of its bounds. We refer to this as Type N deadlocks, where N refers to the fact that the NP, too, isinvolved.
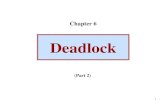
To determine the location of infeasible states in the statespace, a simulation was run at nominal speed and torque over1000 fundamental periods, as shown in Fig. 4. Depending onthe value of the NP potential, the deadlocks are divided into thefollowing three groups, and individual colors and markers areassigned to each group:
red (+) , if vn vn vn (Type N )black (), if vn [vn + vn , vn vn ] (Type M )blue ( ), if vn vn + vn (Type N )
where vn = 0 .006(vn vn ). The rst and third groups(Type N ) correspond to deadlocks, in which the NP potential isclose to or violates its upper or lower bound, respectively. Thesecond group (Type M ) refers to deadlocks, in which the NPpotential is clearly within its bounds.
Fig. 4(a) depicts all deadlocks as a function of T e [T e , T e ]and s [s , s ], i.e., the torque and ux magnitude valueswithin its bounds. The drive is operated at nominal speed,torque, and ux. Type M deadlocks are concentrated in thelower right corner. In this region, a voltage vector is requiredthat increases the torque and decreases the ux magnitude. This
Fig. 4. Deadlocks at nominal speed and torque. Depending on their type, thedeadlocks form clearly visible and distinguishable clusters. (a) Deadlocks as afunction of s [s , s ] and T e [T e , T e ]. (b) Deadlocks as a function
of s [s , s ] and [ 180
, 180
], where is the angle between therotor ux vector and the -axis of the reference frame.
corresponds exactly to the situation discussed in the foregoinganalysis in Section III-B, which is visualized in Fig. 3.
Type N deadlocks also reveal a certain pattern, namely,they occur close to the lower bounds of the torque and uxmagnitude, particularly in the lower left corner, where bothconditions are met. The reason why they occur exactly in thisway is hard to describe in a formal way since the NP is involvedas well. The plot indicates that Type M and Type N deadlocksexhibit a distinctive behavior and suggests that they ought tobe handled separately, as will be discussed in more detail in
Section IV.Fig. 4(b) depicts all deadlocks as a function of s
[s , s ] and [ 180 , 180 ] for all T e [T e , T e ], where is the angle between the rotor ux vector and the -axisof the reference frame. The Type M deadlocks appear inintervals of 60 due to the 60 symmetry of the voltage vectors.The Type N deadlocks appear in intervals of 120 due to thesignicant third-harmonic component of the NP potential [17].Note that the general deadlock pattern of Fig. 4 for nominalspeed is representative for all other velocities, too.
D. Deadlock Resolution Strategy
In the context of MPC, infeasibility problems are usuallyresolved by relaxing some of the control problems constraints
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
5/10
2130 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 49, NO. 5, SEPTEMBER/OCTOBER 2013
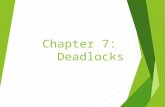
Fig. 5. Evolution of the instantaneous switching frequency (in kilohertz) atnominal speed and torque for the NPC inverter over 1 s. The red stars indicatethe occurrence of deadlocks. A strong correlation between deadlocks andswitching bursts can be observed. (a) Original MPDTC version. (b) MPDTCwith approach A 1 B .
[18]. In the case of MPDTC, the main constraint leading todeadlocks is the restriction of the inverter switch positionsto be discrete valued, rather than real valued; this constraintcannot be relaxed. Instead, the hysteresis bounds are relaxed,by modifying the optimality criterion. Specically, instead of minimizing the switching frequency, the predicted violation of the hysteresis bounds at time step k + 1 is computed, and thevoltage vector that minimizes this violation is chosen [11]. Thisso-called infeasibility exit strategy is executed once the controlalgorithm has encountered a deadlock, and it is applied until thedeadlock has been resolved.
E. Switching Bursts
This infeasibility exit strategy reliably resolves all deadlocksand ensures the stability of the system. It often requires, how-ever, several switching transitions within a short time interval,leading to a spike in the instantaneous switching frequency, towhich we refer to as a switching burst . For the safe operationof the inverter, it is mandatory for the instantaneous switchingfrequency to be constant. Spikes can lead to local overheatingand might prevent the gate drivers from fully recharging. In theworst case, switching bursts can lead to the tripping of the drivesystem.
We dene the instantaneous switching frequency as theaverage number of switching events (of all switching devices)during the last 1 ms. The instantaneous switching frequencyis updated at every sampling step. Fig. 5(a) shows the instan-taneous switching frequency of MPDTC. Characteristic peaks
can be observed, which clearly correlate with the occurrence of deadlocks, denoted by red stars. This indicates that deadlockscause switching bursts; avoiding deadlocks avoids these bursts,as can be seen in Fig. 5(b).
IV. D EADLOCK AVOIDANCE S TRATEGIES
In the following, three different families of deadlock avoid-ance strategies (Approaches A, B , and C ) are presented. Theseare based on terminal soft constraints, terminal weights, andexact deadlock prediction, respectively. While Approaches Aand C can be applied both to Type M and Type N deadlocks,Approach B , which uses a terminal weight, is restricted toType N deadlocks.
A. Approach A1 : Terminal Soft Constraint on Torque and Stator Flux Magnitude
The following terminal soft constraint is added as an addi-tional term J t to the cost function (3a):
J t = m if y (k + N p ) Y c
0 else(7)
where Y c represents the so-called critical region for the elec-tromagnetic torque and stator ux magnitude
Y c = {y | T e T e + T e } {y | s s s } Y .(8)
The set Y c , comprising the bottom right corner in Fig. 4(a),correlates with a high likelihood of Type M deadlocks. Thevariables T e and s are chosen such that all Type M deadlocks are covered, while Y c is as small as possible. Theweight m is very large.
The terminal soft constraint (7) has the following effect on
the selection process of the optimal switching sequence. If thereis at least one sequence such that J t = 0 holds, implying thatits output trajectory does not terminate in the critical region,then only switching sequences are considered such that theconstraint
y (k + N p ) Y \ Y c (9)
is met. Out of this set of switching sequences, the one withthe lowest cost (switching frequency) J sw , which is the originalcost function, is chosen as the optimal sequence. All switchingsequences with J t = m are suboptimal.
If no sequence with J t = 0 exists, i.e., all sequences drive theoutputs into the critical region, then (9) is implicitly relaxed,and all sequences are considered. Therefore, (7) is equivalentto the constraint (9), which is soft, i.e., can be relaxed. Theproposed method only performs well, if the critical regionis well dened and small compared with Y , since MPDTCloses a certain degree of freedom, potentially impacting theperformance. In our case, these two conditions are satised.
B. Approach A2 : Terminal Soft Constraint on Torque, Stator Flux Magnitude, and NP Potential
The terminal soft constraint can be extended to also address
the NP and, therefore, Type N deadlocks. The critical region isthen dened as Y c = Y c Y n with
Y n = {y |vn vn + vn } {y |vn vn vn } (10)
where vn was dened in Section III-C.
C. Approach B: Terminal Weight on NP Potential
Approach B focuses on the NP trajectory and, thus, onType N deadlocks. The quadratic terminal weight
J t = n (vn (k + N p )) 2 (11)
is added to the cost function (3a), where n is a tuning param-eter. As a result, NP trajectories ending close to the reference,
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
6/10
BURTSCHER AND GEYER: DEADLOCK AVOIDANCE IN MODEL PREDICTIVE DIRECT TORQUE CONTROL 2131
Fig. 6. Frequency of deadlocks (in hertz) as function of the speed . The results of the original MPDTC version and the Approaches A 1 , A 2 , B , A 1 B , C 1 ,and C 2 are depicted. (a) Approaches A 1 , A 2 , and B are compared with the original MPDTC version. (b) Approaches A 1 B , C 1 , and C 2 are compared with theoriginal MPDTC version.
which is typically zero, are penalized little, whereas trajectorieswith signicant deviations are penalized severely.
D. Approach A1B : Combination of Approaches A1 and B
The terminal soft constraint on the torque and stator uxtrajectories (Approach A1 ) can be combined with the terminalweight on the NP trajectory (Approach B ), by adding both (7)and (11) to the cost function (3a).
E. Approach C 1 : Deadlock Prediction at Time Step k + N p
Approach C adds a postprocessing step to the MPDTCalgorithm. Once the switching sequences have been enumeratedand a potentially optimal switching sequence U (k) has beendetermined, a deadlock prediction step is executed according tothe following procedure.
1) Given U (k), the terminal state x (k + N p ) is calculatedusing (3b).
2) Using x (k + N p ) as new initial state, the existence of atleast one switching sequence U (k + N p ) starting at k +N p is evaluated that meets the constraints (3b)(3e) atthe time steps k + N p + 1 , . . . , k + N p + N s . Note thatN s equals the minimum length of a feasible switching
sequence.3) If such a U (k + N p ) exists, this serves as a proof that,under nominal conditions (no model mismatches, no ref-erence changes, and no measurement errors), the optimalswitching sequence U (k) does not lead into a deadlock.
4) If no feasible U (k + N p ) is found in step 2), U (k) isdiscarded, the second best sequence is chosen as optimalsequence U (k), and the procedure is repeated, startingat step 1).
In this iterative way, all candidate switching sequences, start-ing with the one with the lowest cost, are analyzed in ascendingorder of their cost, until one is found that does not lead into adeadlock. If no such sequence exists, the one with the lowestcost is selected, similar to Approach A1 .
F. Approach C 2 : Deadlock Prediction at Time Step k + 1
A modied version of Approach C uses x
(k + 1) as thenew initial state, rather than x(k + N p ). Looking only one,instead of N p steps ahead, adds robustness to the strategy, sincex (k + 1) can be predicted more accurately than x (k + N p ),particularly when the prediction horizon is very long.
V. P ERFORMANCE R ESULTS FOR THE NPC I NVERTER
Performance results of the proposed deadlock avoidancestrategies are presented hereafter. Their inuence on the fre-quency of deadlocks, the occurrence of switching bursts, andthe performance are investigated. The NPC inverter driving amedium-voltage IM shown in Fig. 1 is used, with its parametersgiven in Table I in [7].
A. Effect on the Frequency of Deadlocks
At nominal torque, Fig. 6 depicts the number of deadlocks asa function of the speed for all proposed deadlock avoidanceapproaches. In both gures, the straight (black) lines refer tothe original MPDTC version, serving as a benchmark. Fig. 6(a)presents the results for Approaches A1 , A2 , and B , whereasFig. 6(b) focuses on Approaches A1B , C 1 , and C 2 . ApproachA1B avoids all deadlocks except at = 0 .6. Considering theresults of A1 and B separately, one can see that the effect
of Approach A1B is not simply the sum of A1 and B , butrather the synergy of both. A detailed analysis showed thatApproach A1 signicantly reduces Type M deadlocks while in-creasing Type N deadlocks, with the overall result not showinga signicant improvement. If A1 is, however, combined withApproach B , which reliably resolves all Type N deadlocks,this negative effect is compensated for, resulting in a very goodoverall performance. Approaches A2 and C 1 work nearly aswell as A1B in terms of deadlock reduction, while C 2 is lesssuccessful.
B. Effect on Switching Bursts
As previously mentioned, the observed correlation betweendeadlocks and switching bursts leads to the assumption that,
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
7/10
2132 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 49, NO. 5, SEPTEMBER/OCTOBER 2013
Fig. 7. Approach A1 B : Frequency of deadlocks f DL , deviation in switching frequency f sw , and deviation in current THD I THD as a function of theterminal weight n on the NP potential for three different velocities {0.3, 0.6, 1}. (a) f DL (in hertz). (b) f sw (in percent). (c) I THD (in percent).
with the avoidance of deadlocks, also the switching burstscan be avoided. Fig. 5(a) shows the instantaneous switchingfrequency for the original MPDTC version, with clearly identi-able switching bursts. Approach A1B successfully avoids all
switching bursts, as shown in Fig. 5(b).This is not achieved by the other promising approaches, i.e.,A2 , C 1 , and C 2 . It appears that, for these approaches, the effortin terms of switching events to avoid deadlocks is similar to theeffort to resolve deadlocks using the infeasibility exit strategy.In other words, for Approaches A2 , C 1 , and C 2 , the switchingbursts are only shifted, not removed.
Additional investigations revealed that Type N deadlocks arethe dominant cause of switching bursts and that these deadlocksare, in general, more difcult to resolve than deadlocks causedby the torque or ux (Type M deadlocks). It is thereforeparamount to efciently avoid Type N deadlocks. Only Ap-proach B , based on a terminal weight on the NP potential,works in an excellent way, avoiding Type N deadlocks andswitching bursts. The terminal weight reduces the uctuationof the NP potential around its reference gently and smoothly.
C. Effect of the Approach A1B on the Performance
Since only Approach A1B avoids deadlocks as well asswitching bursts, the further investigation is restricted to it. Inthe following, the effect of A1B on the switching frequencyf sw , the total harmonic distortions (THDs) of the current andtorque, I THD and T THD , respectively, and the frequency of
deadlocks f DL are investigated and discussed. Using the orig-inal MPDTC version as a baseline, these performance valuesare normalized, and their percentagewise deviation from theoriginal version is shown, e.g., f sw = ( f A 1 Bsw f orgsw )/f orgsw .
Fig. 7 shows f DL , f sw , and I THD as a function of the terminal weight n imposed on the NP potential. Threedifferent velocities {0.3, 0.6, 1} are investigated. As nis increased, the NP potential is kept more tightly around itsreference, and the number of deadlocks is reduced accordingly,which tends to also reduce the switching frequency. Large n ,however, entails a higher control effort, resulting in an increasein the switching frequency.
The inuence of n on the current distortion is small, sinceit depends primarily on the hysteresis bounds on the stator ux.Nevertheless, less uctuations of the NP potential provide less
TABLE IIP ERFORMANCE IMPROVEMENT IN P ERCENT R ESULTING F ROM
A PPROACH A 1 B , USING THE O RIGINALMPDTC V ERSION AS A BASELINE
Fig. 8. Equivalent representation of the ve-level ANPC voltage sourceinverter driving an IM.
distorted voltage vectors, and avoiding deadlocks preventspotential bound violations. Both aspects have a positive impacton the current THD, as it is visible in Fig. 7(c).
Fig. 7 also reveals that the benet of the terminal weight issimilar for all speeds. To obtain excellent results, however, nhas to be tuned speed dependent, as summarized in Table II.
VI. P ERFORMANCE R ESULTS FOR THE ANPC I NVERTER
A. Control Scheme for the 5L ANPC Inverter
This section considers a medium-voltage drive system com-prising a 6.6-kV IM and the ve-level active NPC (ANPC)inverter shown in Fig. 8, which was recently proposed in [12]
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
8/10
BURTSCHER AND GEYER: DEADLOCK AVOIDANCE IN MODEL PREDICTIVE DIRECT TORQUE CONTROL 2133
TABLE III(L EF T ) RATED VALUES AND (R IGHT ) PER -U NI T
PARAMETERS OF THE D RIVE
and introduced as a commercial product in [19]. Featuring ineach phase a ying capacitor charged to one-fourth of the dc-link voltage, ve voltage levels per phase can be synthesized.The parameters of the ve-level ANPC drive system consideredin this section are provided in Table III.
Current control and modulation are achieved by a hierar-
chical control scheme. The upper layer is based on ofinecomputed optimal pulse patterns (OPPs), which minimize thecurrent THD for a given switching frequency [14]. Fast closed-loop control of the machine currents is achieved by controllingthe stator ux vector along its reference trajectory, manipulatingthe switching instants of the OPPs online, using the principle of MPC. We refer to this control scheme as model predictive pulsepattern control (MP 3C) , which is described in detail in [20] andapplied to the ANPC topology in [21].
The lower control layer keeps the NP potential and thephase capacitor voltages within bounds around their references,exploiting the three-phase redundancy of the voltage vectors
and the single-phase redundancy of the phase states. We refer tothis control scheme as model predictive direct balancing control(MPDBC) [22], which is a derivative of MPDTC. Analogous toMPDTC, the predictive balancing algorithm uses a switchinghorizon, extrapolation, and bounds, within which the outputvariables are kept while minimizing the switching frequency.
In summary, MP3C controls the machine and derives anoptimal sequence of voltage vectors, based on which MPDBCcontrols the internal inverter voltages (NP potential and threephase capacitor voltages), providing the ring signals for thesemiconductors. As a result, the issue of deadlocks is restrictedto MPDBC. An analysis over the whole speed range revealsthat many deadlocks occur at nominal speed = 1 and a fewaround = 0 .3, see Fig. 9. In the following, two deadlock avoidance schemes are proposed, one for nominal and one forlow speed.
B. Deadlock Avoidance at Nominal Speed
When neglecting the NP potential, it is a characteristic of theANPC inverter that a redundant switch position always existsthat reverses the current through the phase capacitors, thusenabling the balancing of their voltages. When also consideringthe NP potential, this statement does no longer hold. At nominalspeed, outer voltage vectors are predominantly used, whichexhibit very little redundancy, restricting the degrees of freedomof MPDBC. This tends to lead to a signicant number of
Fig. 9. Number of deadlocks per second as function of the electrical speed.The two switching horizons SSE and SESE were investigated, each of themfor the pulse numbers d = 6 and d = 10 . The four resulting combinations areas follows: (A) SESE and d = 6 , (B) SSE and d = 6 , (C) SSE and d =10, and (D) SESE and d = 10 .
Fig. 10. Evolution of the instantaneous switching frequency (in kilohertz) atnominal speed and torque for the ANPC inverter over 1 ms. The switching hori-zon SSE is used along with the pulse number d = 6 . The red stars indicatethe occurrence of deadlocks. (a) Original MPDBC version. (b) MPDBC withApproach B .
TABLE IVPERFORMANCE IMPROVEMENT IN P ERCENT A CHIEVED BY A PPROACH B
AT N OMINAL S PEED = 1 A ND U SING THE S WITCHING H ORIZONSSE. T HE O RIGINAL MPDBC VERSION IS U SED AS A BASELINE
deadlocks, in which the NP potential and one (or more) phase
capacitor voltages act as antagonists.Since MPDBC is a derivative and tailored form of MPDTC,the same deadlock avoidance methods as introduced inSection IV can be used. For the deadlocks at nominal speed,Approach B , which imposes a terminal weight on the deviationof the NP potential from its reference, is investigated. Foran appropriate value of n , all deadlocks and all switchingbursts can be successfully avoided, as can be seen in Fig. 10.Table IV presents the performance improvement in percent forthe switching horizon SSE and the pulse numbers d = 6 andd = 10 , using the original MPDBC version as a baseline. Ascan be seen, the switching frequency can be reduced by approx-imately 20% while simultaneously reducing the current andtorque THDs by more than 10%. All deadlocks are removed,when using the terminal weight n = 1 .15 on the NP potential.
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
9/10
2134 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 49, NO. 5, SEPTEMBER/OCTOBER 2013
Fig. 11. Evolution of the instantaneous switching frequency (in kilohertz) at = 0 .3 and nominal torque for the ANPC inverter over 3 ms. The switchinghorizon SSE is used along with the pulse number d = 6 . The red stars in-dicate the occurrence of deadlocks. (a) Original MPDBC version. (b) MPDBCwith a penalty on the common-mode voltage.
C. Deadlock Avoidance at Low Speed
The deadlocks occurring at low speed around = 0 .3 areof a different kind and require another avoidance strategy. Inthis operating regime, short voltage vectors with a three-phaseredundancy of four are available. Each of these redundant volt-age vectors corresponds to a different common-mode voltage.As an example, consider the set of voltage vectors [1 1 2] T ,[0 0 1] T , [ 1 1 0]T , and [ 2 2 1]T . Switching betweenthese three-phase redundant voltage vectors requires switchingin all three phases, incurring a high switching cost.
Deadlocks tend to occur when using such a voltage vectorwith a particular large or small common-mode voltagein theexample earlier, [1 1 2] T or [ 2 2 1]T . Since switchingthe common mode by more than one level up or down isprohibitively expensive and would require an extremely longprediction horizon over which to discount the commutations,MPDBC often fails to achieve this.
This excessive redundancy in the voltage vectors leads todeadlocks, which can be resolved by adding a penalty on thehighest and lowest common-mode levels. As is indicated inFig. 11, this approach works well, removing all deadlocks atlow speed.
VII. C ONCLUSION
For an NPC inverter drive system, this paper has shownthat the deadlocks encountered during the execution of theMPDTC algorithm can be separated into two groups. The rstgroup comprises the deadlocks that are exclusively caused by
the interplay between the torque and stator ux magnitude of the machine. The second group consists of deadlocks, where theNP potential is also involved, being close to one of its boundsor even violating them. Furthermore, it is highlighted thatthese deadlocks trigger spikes in the instantaneous switchingfrequency, so called switching bursts. To prevent the MPDTCalgorithm from running into deadlocks, a combination of ter-minal constraints on the electromagnetic torque and stator uxmagnitude together with a terminal weight on the NP potentialis proposed. This minor modication to the original MPDTCalgorithm successfully avoids all deadlocks over the wholespeed range. As a result, the switching bursts are also avoided,while no signicant performance loss, such as an increase inthe switching frequency or the current THD, is caused by theintroduced methods.
This deadlock avoidance method is also applicable to driveswith more complicated inverter topologies such as the ve-levelANPC inverter drive system, as briey discussed in the previoussection of this paper. Unlike for the NPC inverter, for whichonly the NP potential must be balanced, for the ve-level topol-ogy, also the three phase capacitor voltages must be controlled,
greatly complicating the task of the model predictive directbalancing controller. The introduction of a terminal weight onthe NP potential maintains the latter closer to its referencevalue and greatly reduces the balancing effort required for theNP potential. At low speed, a penalty on the common-modevoltage is imposed. As a result, the deadlocks and switchingbursts are not only avoided, but a signicant improvement of theoverall performance is also observable. At nominal speed, withrespect to the baseline MPDBC method, the average switchingfrequency and the current THD are reduced by 20% and 13%,respectively, as detailed in [17].
The deadlock avoidance strategies proposed in this paper canbe directly applied also to the other members of the MPDTCfamily, notably to model predictive direct current control [7],which is a derivative of MPDTC, and to model predictive directpower control; the latter being the adaptation of MPDTC togrid-connected converters [23].
ACKNOWLEDGMENT
This work was performed at the Department of Electrical andComputer Engineering, The University of Auckland, Auckland,New Zealand.
R EFERENCES[1] D. Q. Mayne, J. B. Rawlings, C. V. Rao, and P. O. M. Scokaert, Con-
strained model predictive control: Stability and optimality, Automatica ,vol. 36, no. 6, pp. 789814, Jun. 2000.
[2] T. Geyer, Low complexity model predictive control in power electron-ics and power systems, Ph.D. dissertation, Autom. Control Lab., ETHZurich, Zurich, Switzerland, 2005.
[3] P. Corts, M. P. Kazmierkowski, R. M. Kennel, D. E. Quevedo, andJ. Rodriguez, Predictive control in power electronics and drives, IEEE Trans. Ind. Electron. , vol. 55, no. 12, pp. 43124324, Dec. 2008.
[4] F. Blaschke, A new method for the structural decoupling of ac inductionmachines, in Proc. IFAC Symp. , Oct. 1971, pp. 115.
[5] S. Mariethoz, A. Domahidi, and M. Morari, Sensorless explicit modelpredictive control of permanent magnet synchronous motors, in Proc. IEEE Int. Elect. Mach. Drive Conf. , Miami, FL, USA, May 2009,pp. 14921499.
[6] J. Rodriguez, J. Pontt, C. Silva, P. Correa, P. Lezana, P. Corts, andU. Ammann, Predictive current control of a voltage source inverter, IEEE Trans. Ind. Electron. , vol. 54, no. 1, pp. 459503, Feb. 2007.
[7] T. Geyer, Model predictive direct current control: Formulation of thestator current bounds and the concept of the switching horizon, IEEE Ind. Appl. Mag. , vol. 18, no. 2, pp. 4759, Mar./Apr. 2012.
[8] T. Geyer, G. Papafotiou, and M. Morari, Model predictive direct torquecontrolPart I: Concept, algorithm, and analysis, IEEE Trans. Ind. Elec-tron. , vol. 56, no. 6, pp. 18941905, Jun. 2009.
[9] T. Geyer, Generalized model predictive direct torque control: Long pre-diction horizons and minimization of switching losses, in Proc. IEEE Conf. Decision Control , Shanghai, China, Dec. 2009, pp. 67996804.
[10] I. Takahashi and T. Noguchi, A new quick response and high efciencycontrol strategy of an induction motor, IEEE Trans. Ind. Electron. ,vol. IA-22, no. 2, pp. 820827, Sep. 1986.
[11] G. Papafotiou, J. Kley, K. G. Papadopoulos, P. Bohren, and M. Morari,
Model predictive direct torque controlPart II: Implementation andexperimental evaluation, IEEE Trans. Ind. Electron. , vol. 56, no. 6,pp. 19061915, Jun. 2009.
-
8/12/2019 Deadlock Avoidance in Model Predictive DTC - Tobias Geyer (IEEE)
10/10
BURTSCHER AND GEYER: DEADLOCK AVOIDANCE IN MODEL PREDICTIVE DIRECT TORQUE CONTROL 2135
[12] P. Barbosa, P. Steimer, J. Steinke, L. Meysenc, M. Winkelnkemper, andN. Celanovic, Active neutral-point-clamped multilevel converters, inProc. IEEE Power Electron. Spec. Conf. , Recife, Brazil, Jun. 2005,pp. 22962301.
[13] T. Geyer, Computationally efcient model predictive direct torque con-trol, IEEE Trans. Power Electron. , vol. 26, no. 10, pp. 28042816,Oct. 2011.
[14] G. S. Buja, Optimum output waveforms in PWM inverters, IEEE Trans.
Ind. Appl. , vol. IA-16, no. 6, pp. 830836, Nov. 1980.[15] T. Geyer, A comparison of control and modulation schemes for medium-voltage drives: Emerging predictive control concepts versus PWM-basedschemes, IEEE Trans. Ind. Appl. , vol. 47, no. 3, pp. 13801389,May/Jun. 2011.
[16] A. Nabae, I. Takahashi, and H. Akagi, A new neutral-point-clampedPWM inverter, IEEE Trans. Ind. Appl. , vol. IA-17, no. 5, pp. 518523,Sep. 1981.
[17] T. Burtscher, Deadlock avoidance and resolution for model predictivedirect torque control, M.S. thesis, Autom. Control Lab., ETH Zurich,Zurich, Switzerland, Jun. 2011.
[18] J. Vada, O. Slupphaug, T. A. Johansen, and B. A. Foss, Linear MPCwith optimal prioritized infeasibility handling: Application, computa-tional issues and stability, Automatica , vol. 37, no. 11, pp. 18351843,Nov. 2001.
[19] F. Kieferndorf, M. Basler, L. A. Serpa, J.-H. Fabian, A. Coccia, andG. A. Scheuer, A new medium voltage drive system based on ANPC-5Ltechnology, in Proc. IEEE Int. Conf. Ind. Technol. , Via del Mar, Chile,Mar. 2010, pp. 605611.
[20] T. Geyer, N. Oikonomou, G. Papafotiou, and F. Kieferndorf, Modelpredictive pulse pattern control, IEEE Trans. Ind. Appl. , vol. 48, no. 2,pp. 663676, Mar./Apr. 2012.
[21] N. Oikonomou, C. Gutscher, P. Karamanakos, F. Kieferndorf, andT. Geyer, Model predictive pulse pattern control for the ve-level activeneutral point clamped inverter, in Proc. IEEE Energy Convers. Congr. Expo. , Raleigh, NC, USA, Sep. 2012, pp. 129136.
[22] F. Kieferndorf, P. Karamanakos, P. Bader, N. Oikonomou, and T. Geyer,Model predictive control of the internal voltages of a ve-level activeneutral point clamped converter, in Proc. IEEE Energy Convers. Congr. Expo. , Raleigh, NC, USA, Sep. 2012, pp. 16761683.
[23] T. Geyer, J. Scoltock, and U. Madawala, Model predictive direct powercontrol for grid-connected converters, in Proc. IEEE Ind. Electron. Soc. Annu. Conf. , Melbourne, Australia, Nov. 2011, pp. 14381443.
Thomas Burtscher received the M.Sc. degree inelectrical engineering from ETH Zurich, Zurich,Switzerland, in 2011.
Subsequently, he joined ABB MV Drives, Turgi,Switzerland, where he works on control software andrmware for medium-voltage drives. His researchinterests include power electronics, control theory,and embedded real-time systems.
Tobias Geyer (M08SM10) received the Dipl.-Ing. and Ph.D. degrees in electrical engineering fromETH Zurich, Zurich, Switzerland, in 2000 and 2005,respectively.
From 2006 to 2008, he was with the High PowerElectronics Group of GEs Global Research Cen-tre, Munich, Germany, where he focused on controland modulation schemes for large electrical drives.Subsequently, he spent three years with the Depart-ment of Electrical and Computer Engineering, TheUniversity of Auckland, Auckland, New Zealand,
where he developed model predictive control schemes for medium-voltagedrives. In 2012, he joined the ABB Corporate Research Center, Baden-Dttwil,Switzerland. His research interests are at the intersection of power electronics,modern control theory, and mathematical optimization. This includes modelpredictive control and medium-voltage electrical drives.
Dr. Geyer was a recipient of the Second Prize Paper Award at the 2008IEEE Industry Applications Society Annual Meeting and of the First PrizePaper Award at the 2012IEEE Energy Conversion Congress and Exposition. Heserves as an Associate Editor of the Industrial Drives Committee for the I EEET RANSACTIONS ON INDUSTRY A PPLICATIONS and as an Associate Editor forthe IEEE T RANSACTIONS ON P OWER E LECTRONICS .