Dc fed chopper
24
Click here to load reader
-
Upload
muhammad-hasan -
Category
Education
-
view
3.292 -
download
29
Transcript of Dc fed chopper

MULTIQUADRANT CONTROL OF
CHOPPER-FED DC MOTORS
Institute of Industrial Electronics Engineering-Karachi
Presentation byMuhammad Ahsan Ali (1915)

CHOPPER
• Chopper is a static device.• A variable dc voltage is obtained from a constant dc
voltage source.• Also known as dc-to-dc converter.• Widely used for motor control.• Also used in regenerative braking.• Thyristor converter offers greater efficiency, faster
response, lower maintenance, smaller size and smooth control.

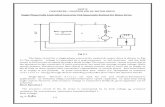
CHOPPER FED DC DRIVES
• A dc chopper is connected between a fixed-voltage dc source and dc motor to vary the armature voltage.
• A chopper is a high speed on/off semiconductor switch which connects source to load and disconnects the load from source at a fast speed.
• Choppers are used to get variable dc voltage from a dc source of fixed voltage.
• Chopper circuits are used to control both separately excited and Series circuits.

ADVANTAGES OF CHOPPER CIRCUITS
• Ripple content in the output is small.• Peak/average and rms/average current ratios are small.• The chopper is supplied from a constant dc voltage using
batteries.• Current drawn by the chopper is smaller than in phase
controlled converters.• Chopper circuit is simple and can be modified to provide
regeneration and the control is also simple.

CONTROL MODES OF DC CHOPPER DRIVE
1. Power(or acceleration) control2. Regenerative brake control3. Rheostatic brake control4. Combined Regenerative and Rheostatic Brake Control

POWER CONTROL

WAVEFORM SUMMARY (Highly Inductive Load)
Ripple-free Armature Current
sa kVV
asaao IkVIVP
a
s
s
seq kI
V
I
VR
m
m
m
s
fL
R
R
VI
4tanhmax
Armature Voltage:
Power suplpied:
Input Resistance:
Peak-to-peak current:
where k =conduction duty cycle

REGENERATIVE BRAKE CONTROL

WAVEFORM SUMMARY

EQUATIONS
sch VkV )1(
)1( kVIP sag
amsg IRVkE )(1
ma
s
a
geq Rk
I
V
I
ER )1( max
max
min
min
fv
am
fv
s
fv
am
IK
IR
IK
V
IK
IR
Voltage across transistor:
Regenerated power:
Voltage when motor acting as generator:
Equivalent load resistance:
Minimum Braking Speed:
Maximum Braking Speed:

RHEOSTATIC BRAKE CONTROL

WAVEFORM SUMMARY

EQUATIONS
• The average current in the braking resistor is
• The average voltage across the braking resistor is
)1( kII ab
)1( kIRV abb
• The equivalent load resistance of the generator
• The power dissipated in the resistor Rb is
mba
beq RkR
I
VR )1(
)1(2 kRIP bab

COMBINED REGENERATIVE AND
RHEOSTATIC BRAKE CONTROL

• Used when the supply is partly “receptive”
• Remove regenerative braking if line voltage is too high– Turn thyristor TR on
– Divert current to RB
– Apply rheostatic braking– TR is “self-commutated”
COMBINED REGENERATIVE AND
RHEOSTATIC BRAKE CONTROL (CONT.)

MULTIQUADRANT CHOPPER DRIVES
o Forward Power Control (I-Quadrant)o Forward Regeneration (II-Quadrant)o Reverse Power Control (III-Quadrant)o Reverse Regeneration (IV-Quadrant)
• Control Modes

Forward Power Control
Q1
T1 & T4 is ON
Current Flow : VS + _ T1 _Motor_T4_VS-
Current Ia & Va are positive
Operates in First Quadrant

T1 is OFF & T4 is ON. Inductor current has to flow in the same Direction.
Diode D1 is FB
Inductor Current freewheels through D1 & T4
Output Voltage is Zero
Forward Power Control (cont.)

T4 is OFF. T2 is ON. (Load is not connected with the source).
Back Emf drives the current through T2 & D3
Forward Power Control (cont.)

Q2
T2 is OFF. Diode D2 is FB
Current flows through D3 & D1
Current Ia is negative & Va is positive.
Operates in second quadrant.
FORWARD REGENERATION

Q3
T3 & T2 is ON
Current Flow : Vdc + _ T3 _Motor_T2_Vdc-
Current Ia & Va are negative
Operates in third Quadrant
Reverse Power Control

Q4
T4 IS Turned Off, D4 is FB
Current Flows through Va+ - D1 – D4 – Va-
Va is negative. But current Ia is positive
Operates in fourth quadrant
REVERSE REGENERATION

References• Power Electronics: Circuit Devices and Application By Haroon Rashid
• Digital Power Electronics and Applications By Ling Luo, M. Rashid

THANK YOU