Dario Paccagnan, Rahul Chandan and Jason R. Mardenjrmarden/files/MardenC2.pdf · Dario Paccagnan,...
15
1 Distributed resource allocation through utility design – Part I: optimizing the performance certificates via the price of anarchy Dario Paccagnan, Rahul Chandan and Jason R. Marden Abstract—Game theory has emerged as a novel approach for the coordination of multiagent systems. A fundamental component of this approach is the design of a local utility function for each agent so that their selfish maximization achieves the global objective. In this paper we propose a novel framework to characterize and optimize the worst case performance (price of anarchy) of any resulting equilibrium as a function of the chosen utilities, thus providing a performance certificate for a large class of algorithms. More specifically, we consider a class of resource allocation problems, where each agent selects a subset of the resources with the goal of maximizing a welfare function. First, we show that any smoothness argument is inconclusive for the design problems considered. Motivated by this, we introduce a new approach providing a tight expression for the price of anarchy (PoA) as a function of the chosen utility functions. Leveraging this result, we show how to design the utilities so as to maximize the PoA through a tractable linear program. In Part II we specialize the results to submodular and supermodular welfare functions, discuss complexity issues and provide two applications. Index Terms– Game theory, distributed optimization, resource allocation, combinatorial optimization, price of anarchy, linear program, duality. I. I NTRODUCTION M ULTIAGENT systems have enormous potential for solving many of the current societal challenges. Robotic networks can operate in post-disaster environments and reduce the impact of nuclear, industrial or natural calami- ties [1], [2]. They have the potential to increase the food production efficiency and to reduce the water consumption [3]. Fleets of autonomous cars are forecasted to revolutionize the future mobility and to reduce traffic congestion as well as pollutant emissions [4]. On a smaller scale, swarms of “microbots” promise groundbreaking results in medicine by means of local drug delivery [5] or microsurgery [6]. The main challenge in controlling such systems is to design local decision rules for the individual subsystems to guar- antee that the collective behaviour is desirable with respect to a global objective [7]. The spatial distribution, privacy requirements, scale, and quantity of information associated with typical networked systems do not allow for central- ized communication and decision making, but require instead the use of distributed protocols. In addition to the above requirements, designing such protocols is non-trivial due to This research was supported by SNSF Grant #P1EZP2-172122 and by ONR Grant #N00014-15-1-2762, NSF Grant #ECCS-1351866. D. Paccagnan is with the Automatic Control Laboratory, Swiss Federal Institute of Technology, Zurich, Switzerland. Email: [email protected]. R. Chandan and J. R. Marden is with the Department of Electrical and Computer Engineering, University of California, Santa Barbara, USA. Email: [email protected]. presence of heterogenous decision makers and informational constraints. The above mentioned problem is typically posed as an optimization problem (finite or infinite dimensional), where the system-level objective is captured by an objective function (functional), while physical laws and informational availability are incorporated as constraints on the decision variables. The design is complete once a distributed decision making algorithm has been found, satisfying the constraints and maximising the objective function [8], [9]. A well-established and fruitful approach to tackle this problem consists in the design of a centralized maximization algorithm, that is later distributed by leveraging the structure of the problem considered. Examples in continuous optimization include algorithms such as distributed gradient ascent, primal- dual and Newton’s method [10], [11]. A different and promising approach, termed game design, has recently emerged as a tool to complement the partial understanding offered by more traditional techniques [12]. Rather than directly specifying a decision-making process, local utility functions are assigned to the agents, so that their selfish maximization translates in the achievement of the system level objective. The potential of this technique stems from the possibility to inherit a pool of algorithms that are distributed by nature, asynchronous, and resilient to external disturbance [13]. The game design approach is tightly connected with the notion of equilibrium in game theory, and its origin stems from a novel engineering perspective on this field. Given an optimization problem we wish to solve distributedly, the game design procedure proposed in [12], [14] is summarized in Figure 1 and consists in the following steps: 1 1) Utility design: assign an equilibrium concept for the game and utility functions to each agent. 2) Algorithm design: devise a distributed algorithm to guide agents to the chosen equilibrium concept. Optimization problem Game design 1) Utility design: - assign utility functions to each agent - choose equilibrium concept for the game 2) Algorithm design: - devise distributed algorithm guiding agents to chosen equilibrium concept Distributed algorithm with performance guarantees Fig. 1. Game theoretic approach for the design of distributed control systems. 1 In the following, we identify the agents of the optimization problem and their local constraint sets with the players of the game and their action sets. arXiv:1807.01333v1 [cs.GT] 3 Jul 2018
Transcript of Dario Paccagnan, Rahul Chandan and Jason R. Mardenjrmarden/files/MardenC2.pdf · Dario Paccagnan,...

1
Distributed resource allocation through utility design – Part I:optimizing the performance certificates via the price of anarchy
Dario Paccagnan, Rahul Chandan and Jason R. Marden
Abstract—Game theory has emerged as a novel approachfor the coordination of multiagent systems. A fundamentalcomponent of this approach is the design of a local utility functionfor each agent so that their selfish maximization achieves theglobal objective. In this paper we propose a novel frameworkto characterize and optimize the worst case performance (priceof anarchy) of any resulting equilibrium as a function of thechosen utilities, thus providing a performance certificate for alarge class of algorithms. More specifically, we consider a classof resource allocation problems, where each agent selects a subsetof the resources with the goal of maximizing a welfare function.First, we show that any smoothness argument is inconclusive forthe design problems considered. Motivated by this, we introducea new approach providing a tight expression for the price ofanarchy (PoA) as a function of the chosen utility functions.Leveraging this result, we show how to design the utilities soas to maximize the PoA through a tractable linear program.
In Part II we specialize the results to submodular andsupermodular welfare functions, discuss complexity issues andprovide two applications.
Index Terms– Game theory, distributed optimization, resourceallocation, combinatorial optimization, price of anarchy, linearprogram, duality.
I. INTRODUCTION
MULTIAGENT systems have enormous potential forsolving many of the current societal challenges.
Robotic networks can operate in post-disaster environmentsand reduce the impact of nuclear, industrial or natural calami-ties [1], [2]. They have the potential to increase the foodproduction efficiency and to reduce the water consumption[3]. Fleets of autonomous cars are forecasted to revolutionizethe future mobility and to reduce traffic congestion as wellas pollutant emissions [4]. On a smaller scale, swarms of“microbots” promise groundbreaking results in medicine bymeans of local drug delivery [5] or microsurgery [6].
The main challenge in controlling such systems is to designlocal decision rules for the individual subsystems to guar-antee that the collective behaviour is desirable with respectto a global objective [7]. The spatial distribution, privacyrequirements, scale, and quantity of information associatedwith typical networked systems do not allow for central-ized communication and decision making, but require insteadthe use of distributed protocols. In addition to the aboverequirements, designing such protocols is non-trivial due to
This research was supported by SNSF Grant #P1EZP2-172122 and by ONRGrant #N00014-15-1-2762, NSF Grant #ECCS-1351866.
D. Paccagnan is with the Automatic Control Laboratory, SwissFederal Institute of Technology, Zurich, Switzerland. Email:[email protected].
R. Chandan and J. R. Marden is with the Department of Electrical andComputer Engineering, University of California, Santa Barbara, USA. Email:[email protected].
presence of heterogenous decision makers and informationalconstraints. The above mentioned problem is typically posedas an optimization problem (finite or infinite dimensional),where the system-level objective is captured by an objectivefunction (functional), while physical laws and informationalavailability are incorporated as constraints on the decisionvariables. The design is complete once a distributed decisionmaking algorithm has been found, satisfying the constraintsand maximising the objective function [8], [9].
A well-established and fruitful approach to tackle thisproblem consists in the design of a centralized maximizationalgorithm, that is later distributed by leveraging the structure ofthe problem considered. Examples in continuous optimizationinclude algorithms such as distributed gradient ascent, primal-dual and Newton’s method [10], [11].
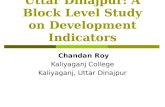
A different and promising approach, termed game design,has recently emerged as a tool to complement the partialunderstanding offered by more traditional techniques [12].Rather than directly specifying a decision-making process,local utility functions are assigned to the agents, so thattheir selfish maximization translates in the achievement ofthe system level objective. The potential of this techniquestems from the possibility to inherit a pool of algorithmsthat are distributed by nature, asynchronous, and resilient toexternal disturbance [13]. The game design approach is tightlyconnected with the notion of equilibrium in game theory,and its origin stems from a novel engineering perspective onthis field. Given an optimization problem we wish to solvedistributedly, the game design procedure proposed in [12], [14]is summarized in Figure 1 and consists in the following steps:1
1) Utility design: assign an equilibrium concept for the gameand utility functions to each agent.2) Algorithm design: devise a distributed algorithm to guideagents to the chosen equilibrium concept.
Optimization problem
Game design
1) Utility design:
- assign utility functions to each agent- choose equilibrium concept for the game
2) Algorithm design:- devise distributed algorithm guiding
agents to chosen equilibrium concept
Distributed algorithm withperformance guarantees
Fig. 1. Game theoretic approach for the design of distributed control systems.
1In the following, we identify the agents of the optimization problem andtheir local constraint sets with the players of the game and their action sets.
arX
iv:1
807.
0133
3v1
[cs
.GT
] 3
Jul
201
8

2
The objective of the game design procedure is to obtainan efficient and distributed algorithm for the solution of theoriginal optimization problem. While the introduction of anauxiliary equilibrium problem might seem artificial at first,this approach has recently produced a host of new results[15]–[17], and will be fruitful here too. Observe that, in orderfor the game design procedure to be relevant to the originaloptimization problem, the utility functions need to be carefullydesigned so that the chosen equilibrium (equilibria) coincidewith the global optimizer(s) of the original problem, or isprovably close to. It is important to highlight that we arenot modeling agents as competing units, but we are ratherdesigning their utilities to achieve the global objective.
While the field of learning in games offers readily availablealgorithms to coordinate agents towards an equilibrium ina distributed fashion (i.e. they address the second step ofFigure 1) [18]–[23], the utility design problem is much lesstracked. Additionally, even if the body of research quantifyingthe inefficiency of equilibria is vast (e.g. the smoothnessframework of [24]), these results are not suited for the de-sign problem considered here.2 Furthermore, the problem ofdesigning utility functions so as to maximize such efficiencymeasure has been studied only in special cases [25], [26].
The overarching goal of this manuscript is to provide aframework to compute the equilibrium efficiency as a functionof the given utility functions, and to optimally select utilitiesso as to maximize this quantity.
Model. In this paper, we focus on a class of resource allocationproblems, where each agent selects a subset of resources withthe goal of maximizing a prespecified welfare function. Thelatter is assumed to be additive with respect to the resources.Resource allocation problems are ubiquitous in engineeringand computer science. Their applications include but are notlimited to sensor allocation problems [16], Adwords for e-commerce [27], vehicle-target assignment [13] as well ascharging of electric vehicles [28]. While the performance of analgorithm is typically gauged by several dimensions, includingthe stability and efficacy of the transient behavior, we measureits quality with the worst case steady-state performance. Thelatter is captured by the concept of price of anarchy (PoA)[29]. Informally, the price of anarchy provides performanceguarantees associated with the worst performing equilibriumof the designed game relative to an optimal allocation. In allthe forthcoming analysis, we consider the solution concept ofpure Nash equilibrium.
Contributions. Our main contributions are as follows.1) We show that the (λ, µ)-smoothness framework typically
used to bound the price of anarchy [24] is inconclusive inour setting and is not suited for the utility design problemsconsidered here.3 More precisely, we show that the effi-ciency bounds obtained using a smoothness argument arerather conservative (Theorem 1).
2Throughout the manuscript, we use the expression “efficiency of an equi-librium” to indicate the ratio between the objective value at that equilibriumand the optimal objective value.
3The smoothness framework is one of the most common set of tools used tobound the equilibrium efficiency. It has been used to provide tight efficiencybounds for e.g., routing games and combinatorial auctions. See [30], [31].
2) Relative to the class of resource allocation problems con-sidered here, we resolve the problem of computing theexact (i.e. tight) price of anarchy (PoA) by means of atractable linear program in its primal (Theorem 2) anddual form (Theorem 3). The latter program features only2 decision variables, O(n2) constraints and thus can besolved efficiently.4
3) We solve the problem of designing utility functions soas to maximize the efficiency (price of anarchy) of thecorresponding game. We show that this design problemcan also be posed as a tractable linear program in n + 1variables and O(n2) constraints (Theorem 4).
The upshot of our contributions is the possibility to apply thegame design procedure to a broad class of problems: we arenow able to provide performance guarantees for a given set ofutility functions, and we can perform optimal utility design.
With this respect, Part II specializes the results presentedhere and demonstrates their applicability by means of twoapplications.
Organization. The rest of the paper is organized as follows:Subsections II-A and II-B contain the problem formulation,as well as the game theoretic approach and the correspondingperformance metrics (price of anarchy). Section III providesconnections with related works. Section IV revisits thesmoothness framework and shows its inapplicability to theutility design problem considered. Section V shows how toreformulate the problems of characterizing and optimizingthe price of anarchy as tractable linear programs.
Notation. For any two positive integers p ≤ q, denote [p] ={1, . . . , p} and [p, q] = {p, . . . , q} We use N, R>0 and R≥0 todenote the set of natural numbers, positive and non negativereal numbers, respectively. The function 1{f(x)≥0} assumesvalue 1 if f(x) ≥ 0, and zero else. Given a finite set I, |I|denotes the number of elements in I.
II. MODEL AND PERFORMANCE METRICS
A. Problem formulation
Consider R = {r1, . . . , rm} a finite set of resources, whereeach resource r ∈ R is associated with a value vr ≥ 0 describ-ing its importance. Further let N = {1, . . . , n} be a finite set ofagents. Every agent i ∈ N selects ai, a subset of the resources,from the given collection Ai ⊆ 2R, i.e. ai ∈ Ai. The welfareof an allocation a = (a1, . . . , an) ∈ A = A1 × · · · × An isgiven by
W (a) :=∑
r∈∪i∈Nai
vrw(|a|r), (1)
where W : 2R × · · · × 2R → R, |a|r = |{i ∈ N s.t. r ∈ ai}|captures the number of agents selecting resource r in alloca-tion a, and w : [n]→ R≥0 is called the welfare basis function.Informally, w scales the value of each resource depending onhow many agents selected it.
4n represents the number of agents in the original optimization problem.

3
The objective of the system designer is to find a feasibleallocation maximizing the welfare, i.e
aopt ∈ argmaxa∈A
W (a) .
We will often represent an allocation a as (ai, a−i), wherea−i = (a1, . . . , ai−1, ai+1, . . . , an) denotes the decision of allthe agents but i.
B. Utility design and corresponding performance metrics
Within the combinatorial framework studied in this paper,finding a feasible allocation that maximizes W (a) is knownto be a hard problem. Even when assuming monotonicity andsubmodularity of W , the problem remains hard, and indeeda generic instance is hard to approximate within any ratiobetter than 1−1/e [32], where e is the Euler’s number. Basedon such observation, this work focus on deriving efficientand distributed algorithms for attaining approximate solutionsto the maximization of (1), ideally with the best possibleratio. While under suitable technical conditions centralizedalgorithms are available to accomplish this task [32], the focusis placed here on distributed algorithms. In the following,each agent is assumed to have information only regardingthe resources that he can select, i.e. regarding the resourcesr ∈ Ai ⊆ R. Agents are requested to make independentchoices in response to this local piece of information. Ratherthan directly specifying a decision-making process as typicallydone in the literature, we adopt the game design approachdiscussed in the introduction and depicted in Figure 1.
In the remainder of this work we focus on its first compo-nent i.e. on the utility design problem. The latter amounts tothe choice of local utility functions that adhere to the abovementioned informational constraints, and whose correspondingequilibria offer the highest achievable performance. Towardsthis goal, each agent is assigned a local utility functionui : A → R≥0 of the form
ui(a) =∑r∈ai
vrw(|a|r)f(|a|r) , (2)
where f : [n] → R≥0 describes the fractional benefit ofvrw(|a|r) that each agent receives by selecting resource rin allocation a. The function f constitutes our only designchoice; we refer to it as to the distribution rule.5 Observe thateach utility function in (2) satisfies the required informationalconstraints in that it only depends on the value of the resourcesthat the agent selected, the distribution rule f and the numberof agents that selected the very same resource. In the remainingof this paper, we focus on the solution concept of pure Nashequilibrium, which we will refer to as just an equilibrium.
Definition 1 (Nash equilibrium, [33]). An allocation ane ∈ Ais a pure Nash equilibrium if ui(ane) ≥ ui(ai, a
ne−i) for all
alternative allocations ai ∈ Ai and for all agents i ∈ N .
5A different and apparently less restrictive choice might entail assigningdifferent distribution rules to different players. However, it is possible to showthat working in this larger set of admissible utility functions will not improvethe best achievable performance. While we do not provide a proof of thisstatement, a similar conclusions was found in [26]. For this reason, in thefollowings we focus on utility functions of the form (2).
We identify the game introduced above with the tuple
G = (R, {vr}r∈R, N, {Ai}i∈N , f) , (3)
and for ease of notation remove the subscripts of the abovesets, e.g., use {Ai} instead of {Ai}i∈N . It is important tohighlight that for the class of games with utility functions(2), an equilibrium allocation is guaranteed to exist, as Gis known to be a congestion game [34]. In the remainingof this manuscript, we require a system operator to robustlydesign a distribution rule, that is to design f without any priorinformation regarding the resource set R, the value of theresources {vr} or the action sets of the agents {Ai}. The onlydatum available to the system designer is an upper boundon the number of players in the game i.e. |N | ≤ n. Thisrequest stems from the observation that the previous pieces ofinformation may be unreliable, or unavailable to the systemdesigner due to, e.g., communication restrictions or privacyconcerns. Formally, given a distribution rule f , we introducethe following family of games
Gf := {(R, {vr}, N, {Ai}, f) s.t. |N | ≤ n} ,
containing all possible games G where the number of agentsis bounded by n. In the forthcoming analysis, we restrict ourattention to the class of games where the number of players isexactly n. This is without loss of generality. Indeed the latterclass of games and the class of games where the number ofplayers is upper bounded by n have the same price of anarchy.6
We measure the performance of a distribution rule f adaptingthe well known concept of price of anarchy [29] as
PoA(f) = infG∈Gf
(mina∈NE(G)W (a)
maxa∈AW (a)
), (4)
where NE(G) denotes the set of Nash equilibria of G. Whilethe optimal value at the denominator of (4) also depends onthe instance G considered, we do not indicate it explicitly, forease of presentation. The quantity PoA(f) characterizes theefficiency of the worst-performing Nash equilibrium relativeto the the corresponding optimal allocation, over all possibleinstances in the class Gf . According to the previous definition,0 ≤ PoA(f) ≤ 1 and the higher the price of anarchy, the betterperformance certificates we can offer. Observe that wheneveran algorithm is available to compute one such equilibrium, theprice of anarchy also represents the approximation ratio of thecorresponding algorithm over all the instances G ∈ Gf . Theutility design problem can be decomposed in two tasks:
i) providing a bound (or ideally an exact characterization)of the price of anarchy as a function of f ;
ii) optimizing this expression over the admissible distribu-tion rules.
In Section IV and Subsections V-A, V-B, V-C we address i),while in Subsection V-D we turn the attention to ii).
6To see this, note that the price of anarchy of any game with m playersm < n can be obtained as the price of anarchy of a game with n playerswhere we add a resource valued v0 = 0 and set Ai = {v0} for the additionaln−m players.

4
III. RELATED WORKS
The use of game theoretic learning algorithms for the dis-tributed solution of optimization problems has been proposedin [13], and since then a number of works have followed asimilar approach [35]–[37]. We redirect the reader to [38]for a general overview on equilibrium learning algorithmsin distributed control. What has been less understood so far,is how to provide performance certificates for a given setof utility functions. In this respect, efficiency bounds areeither limited to specific problems, e.g., concave cost sharing,reverse carpooling problems [25], [39] or confined to particulardesign methodologies such as the Shapley value or marginalcontribution [40], [41].
The performance degradation of an equilibrium allocationcompared to the optimal solution has been subject of intenseresearch in the field of algorithmic game theory (through thenotions of price of anarchy, price of stability [29], [42]).Nevertheless, the results available therein are not helpful forthe design problem studied here. The widely used smoothnessframework proposed in [24] has proved useful in bringing anumber of different results under a common language andhas produced tightness guarantees for different problems [24],[31]. Nevertheless, the latter framework requires the sum ofthe utility functions to be equal (or less equal) to the welfarefunction (budget-balance condition). While this assumption iswell justified for a number of problems modeled through gametheory (e.g., cost sharing games [43]), it has little bearing onthe design of local utility functions studied here.
The problem of designing local utility functions so as tomaximize the efficiency of the emerging equilibria find itsroots in the economic literature relative to the design ofoptimal taxations [44]. The approach has been applied tothe design of engineering systems only recently. With respectto such systems, the utility design problem lacks a generalframework.
The idea of using an auxiliary linear program (LP) to studythe equilibrium efficiency has appeared in very few worksin the literature [45]–[48]. Note that, all the aforementionedworks assume the budget-balance condition to hold true. In[45], the authors pose the problem in an abstract form andthe corresponding linear program is used as a conceptual tool,rather than as a machinery to explicitly compute the priceof anarchy. While [46] provides result for polynomial la-tency functions in weighted congestion games, the techniquesproposed in [46]–[48] require an ad-hoc bound on the dualobjective to obtain a bound on the price of anarchy. This isnot the case with our approach. Additionally, we note thatthe linear programming reformulations of [45] capture theprice of anarchy for a given problem instance, while in thiswork we consider the worst case instance over an admissibleclass of problems. This additional requirement complicates theanalysis, but will produce algorithms that are provably robustto the presence of uncertainty, and are thus better suited forengineering implementation. Finally, we observe that a directtransposition of the approach in e.g., [45] to our setting wouldproduce a linear program whose size grows exponentially inthe number of resources, making it impossible to solve for real
world applications.
IV. THE SMOOTHNESS FRAMEWORK AND ITS LIMITATIONS
In this section we recall the definition of smooth games,and show that the corresponding best achievable bounds onthe price of anarchy are not tight, but rather conservativewhen applied to utility design problems. The notion of smoothgame has been introduced in [24] and has been successivelyemployed to obtain tight bounds on the price of anarchy fordifferent classes of games.
Definition 2 (Smooth Game). The utility-maximization gameG in (3) together with the welfare function (1) is (λ, µ)-smoothif for some λ, µ ≥ 0 it holds∑
i∈Nui(a
?i , a−i) ≥ λW (a?)− µW (a) , ∀a, a? ∈ A. (5)
The following lemma provides a lower bound on the ratiobetween the total welfare at any Nash equilibrium and theoptimum, relative to the specific instance G considered.
Proposition 1 ([24]). Consider a (λ, µ)-smooth game with∑i∈N ui(a) ≤W (a) , ∀a ∈ A. Then, for any ane equilibrium
of GW (ane)
W (aopt)≥ λ
1 + µ. (6)
While the result reported in Proposition 1 is limited to Nashequilibria, the bound (6) holds for a significantly larger classof equilibria, known as coarse correlated equilibria [24]. Thestrength of the smoothness framework is, amongst others, inthe recipe it provides to obtain performance bounds for a largeclass of equilibria.
Note that the smoothness framework forces us to restrictthe attention to utilities satisfying
∑i∈N ui(a) ≤ W (a), else
no guarantee is provided by Lemma 1. This corresponds torequesting f(j) ≤ 1/j. Thus, in the remaining of this sectiononly, we consider utilities satisfying this constraint.
The next lemma shows that when we are allowed to freelychoose the players’ utilities (i.e. if we are interested indesign problems), the best achievable smoothness guaranteeis obtained when
∑i∈N ui(a) =W (a) for all a.
Lemma 1. Suppose∑i∈N ui(a) =W (a). Consider a differ-
ent set of utilities ui(a) such that∑i∈N ui(a) ≤
∑i∈N ui(a)
for all a ∈ A. If the game with utilities ui(a) is (λ, µ)-smooth,then the game with utilities ui(a) is also (λ, µ)-smooth.
Proof. By assumption the game with utilities ui(a) is (λ, µ)-smooth and
∑i ui(a) ≥
∑i ui(a), so that for all a, a? ∈ A∑
i∈Nui(a
?i , a−i) ≥
∑i∈N
ui(a?i , a−i) ≥ λW (a?)− µW (a).
Thus, the game with utilities ui(a) is (λ, µ)-smooth too.
Lemma 1 suggest to design utilities that are budget-balanced, in that sub budget-balanced utilities can never beadvantageous with regards to the performance guaranteesassociated with smoothness.7 This observation turns out to
7 The statement of Lemma 1 holds true in general and does not depend onthe specific form of the utility functions or of the welfare considered here.

5
be misleading, in that there are utility functions that are subbudget-balanced, but give a better performance certificate thanwhat the smoothness argument can offer, as shown next.
Consider f a distribution rule satisfying f(j) ≤ 1/j for allj ∈ [n], the best bound on the price of anarchy (4) that canbe obtained via smoothness, is given by the solution to thefollowing program
SPoA(f) := supλ,µ≥0
λ
1 + µ
s.t. (λ, µ) satisfy (5) for all G ∈ Gf .
Observe that SPoA(f) ≤ PoA(f) as Proposition 1 providesonly a bound on the equilibrium efficiency. In the following weshow that the best smoothness bound captured by SPoA(f)is not representative of the “true” price of anarchy PoA(f)defined in (4). To do so, we illustrate the gap between thesetwo quantities in the special case of set covering problems[26]. Set covering problems are a special class of the resourceallocation problems considered here. They are obtained settingw(j) = 1 for all j ∈ [n]. Before stating the result, we introducethe distribution rule
fgar(j) = (j − 1)!
1(n−1)(n−1)! +
∑n−1i=j
1i!
1(n−1)(n−1)! +
∑n−1i=1
1i!
, j ∈ [n] . (7)
as originally defined in [26, equation (5)].
Theorem 1 (Limitations of the smoothness framework).Consider the class of set covering problems i.e. fix w(j) = 1.
i) For any choice of f , the best bound on the price of anar-chy that can be achieved using a smoothness argument is
SPoA(f) ≤ 1
2− 1/n:= b(n)
n→∞−−−−→ 1
2.
ii) The distribution (7) satisfies fgar(j) ≤ 1/j and achieves
PoA(fgar) = 1− 11
(n−1)(n−1)! +∑ni=0
1i!
n→∞−−−−→ 1− 1
e,
where e is Euler’s number.iii) For all n > 2, SPoA(fgar) < PoA(fgar) .
The proof of the claims i) and iii) is reported in theAppendix. The claim ii) is instead proven in [26].
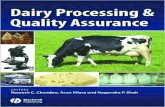
The quantity b(n) bounding the best possible performancecertificate offered by the smoothness framework, and theguarantee offered by the “true” price of anarchy for fgarare presented in Figure 2 (left). Additionally, the distributionrules fgar(j) and 1/j are depicted in Figure 2 (right). Thegap between b(n) and PoA(fgar) is significant: for a systemwith e.g., n = 20 agents, PoA(fgar) produces a performancecertificate that is at least 25% higher than what SPoA(fgar)can offer. Thus, the smoothness framework is not the right toolto study the utility design problems considered here. First, itrestricts the set of admissible distribution rule to f(j) ≤ 1/j.Second, even for distribution rules satisfying this assumption,it provides performance certificates that are too conservative.Finally, we observe that the notion of local smoothness (arefinement of the original notion introduced in [49]) will notbe useful here in improving SPoA.
1 5 10 15 200.5
0.6
0.7
0.8
0.9
1
nj
b(n)
PoA(fgar)
1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
jn
fgar(j)
1/j
Fig. 2. Left: best achievable bound b(n) on the price of anarchy usinga smoothness argument, and actual price of anarchy PoA(fgar) for thedistribution fgar in (7). Right: Distribution rule fgar and fSV for n = 10.
V. A NOVEL FRAMEWORK TO COMPUTE AND OPTIMIZETHE PRICE OF ANARCHY
In the previous section we have highlighted the limitationsof the smoothness framework when applied to utility designproblems. In this section we propose a novel approach for theexact characterization and optimization of PoA(f) as definedin (4). More precisely, we reformulate both the problems ofcomputing and optimizing the price of anarchy as tractablelinear programs involving the components of w and of f .This section is dedicated to the problem of characterizingand optimizing the price of anarchy in its full generality.The expressions obtained are provably tight and connect witha number of works in the field of algorithmic game theorystudying the efficiency of equilibria.
Throughout the manuscript and in all the forthcominganalysis, we make the following regularity assumptions onadmissible welfare basis functions and distribution rules.
Standing AssumptionsThe sets Ai ⊆ 2R are nonempty and Ai \∅ 6= ∅ for all i ∈ N .Further, ∃r ∈ R s.t. vr > 0 and r ∈ ai ∈ Ai for some i ∈ N .The welfare basis function w : [n] → R>0 satisfies w(j) > 0for all j ∈ [n]. A distribution rule f : [n] → R≥0 satisfiesf(1) ≥ 1, f(j) ≥ 0 for all j ∈ [n]. The latter is equivalent tof ∈ F , upon defining
F := {f : [n]→ R≥0 s.t. f(1) ≥ 1, f(j) ≥ 0 ∀j ∈ [n]}.
The non-emptiness of Ai ensures feasibility of the welfaremaximization introduced in Section II-A. The assumptionsAi \ ∅ 6= ∅ for all i ∈ N and ∃r ∈ R s.t. vr > 0 ensurethat the problem is non degenerate, in that every agent hasthe possibility to select at least one resource, and not allthe resources have a value of zero. Finally, observe that theassumption f(1) ≥ 1 is without loss of generality for alldistributions with f(1) > 0. Indeed, If f(1) 6= 1, but f(1) > 0,it is possible to scale the value of the resources and reduce tothe case f(1) = 1.
A. An informal introduction
While Equation (4) corresponds to the definition of price ofanarchy, it also describes a (seemingly difficult) optimizationproblem. The aim of this section, is to transform the definition

6
of price of anarchy into a finite dimensional linear programthat can be efficiently solved. Towards this goal, we providehere an informal introduction (based on four steps), as webelieve the reader will benefit from it. The formal derivationand justification of each of these steps is postponed to Theorem2 and its proof.
Step 1: we observe that the price of anarchy computed over thefamily of games G ∈ Gf is the same of the price of anarchyover the reduced family of games Gf , where the feasibleset of every player only contains two allocations: (worst)equilibrium and optimal allocation, that is Ai = {anei , a
opti },
Gf := {(R, {vr}, N, {Ai}, f)} and definition (4) reduces to
PoA(f) = infG∈Gf
(W (ane)
W (aopt)
),
s.t. ui(ane) ≥ ui(aopti , ane−i) ∀i ∈ N ,
where we have constrained ane to be an equilibrium. We donot include the additional constraints requiring ane to be theworst equilibrium and aopt to provide the highest welfare.This is because the infimum over Gf and the parametrizationwe will introduce to describe an instance G (in step 4) willimplicitly ensure this.
Step 2: we assume without loss of generality that W (ane) = 1and fold the inf and max operator to get
PoA(f) = infG∈Gf
1
W (aopt),
s.t. ui(ane) ≥ ui(aopti , ane−i) ∀i ∈ N ,
W (ane) = 1 .
(8)
Step 3: we relax the previous program as in the following
PoA(f) = infG∈Gf
1
W (aopt),
s.t.∑i∈N
ui(ane)− ui(aopti , ane−i) ≥ 0 ,
W (ane) = 1 ,
(9)
where the n equilibrium constraints (one per each player) havebeen substituted by their sum. We show that the relaxationgives the same price of anarchy of (8).
Step 4: For a given instance in the reduced family Gf ,computing the efficiency amounts to identifying an optimalallocation and the corresponding worst Nash equilibrium. Theadditional difficulty appearing in (9) is in how to describe ageneric instance G ∈ Gf and on how to compute the infimumover all such (infinite) instances. To do so, we introducean efficient parametrization that fully describes the objectivefunction and the decision variables of the previous problem.This allows to reduce (9) and obtain the result in the followingTheorem 2.
B. The linear program reformulation
The following theorem makes the reasoning presented inSubsection V-A formal and constitutes the second result ofthis manuscript.
In order to capture all the instances in Gf , we use aparametrization inspired by [50] and introduce the variablesθ(a, x, b) ∈ R defined for any tuple of integers (a, x, b) ∈ I,where
I := {(a, x, b) ∈ N3≥0 s.t. 1 ≤ a+ x+ b ≤ n} ,
IR := {(a, x, b) ∈ I s.t. a·x·b = 0 or a+ x+ b = n} .
Note that IR contains all the integer points on the planes a =0, b = 0, x = 0, a+ x+ b = n bounding I. In the remainderof this manuscript we write
∑a,x,b instead of
∑(a,x,b)∈I , for
readability. Additionally, given a distribution rule f : [n] →R≥0, and a welfare basis function w : [n]→ R>0, we extendtheir definition, with slight abuse of notation, to f : [0, n +1]→ R≥0 and w : [0, n+1]→ R≥0, where we set the first andlast components to be identically zero, i.e. f(0) = w(0) = 0,f(n+ 1) = w(n+ 1) = 0.8
Theorem 2 (PoA as a linear program). Given f ∈ F , theprice of anarchy (4) is
PoA(f) =1
W ?,
where W ? is the value of the following (primal) linearprogram in the unknowns θ(a, x, b) ∈ R≥0, (a, x, b) ∈ I
W ? = maxθ(a,x,b)
∑a,x,b
1{b+x≥1}w(b+ x)θ(a, x, b)
s.t.∑a,x,b
[af(a+x)w(a+x)−bf(a+x+1)w(a+x+1)]θ(a, x, b)≥0∑a,x,b
1{a+x≥1}w(a+ x)θ(a, x, b) = 1
θ(a, x, b) ≥ 0 ∀(a, x, b) ∈ I .(10)
The proof is reported in the Appendix and is based on thefour steps discussed in Subsection V-A.
Given a distribution rule f , the solution to the previous pro-gram returns both the price of anarchy, and the correspondingworst case instance (encoded in θ(a, x, b), see the proof of theStep 4 in the Appendix). Observe that the number of decisionvariables in (10) is |I| = 1
2
∑nj=0(j + 2)(j + 1) ∼ O(n3),
while only two scalar constraints are present (neglecting thepositivity constraint). The previous program can thus alreadybe solved efficiently. Nevertheless, we are only interested inthe expression of PoA(f) (i.e. ultimately in the value of theprogram), and therefore consider the dual counterpart of (10)in the following.
C. The dual reformulation
Thanks to strong duality, it suffices to solve the dualprogram of (10) to compute the price of anarchy (4). Whilethe dual program should feature two scalar decision variablesand O(n3) constraints, the following Theorem shows how toreduce the number of constraints to only |IR| = 2(n2 + 1) ∼O(n2). The overarching goal is to progress towards an explicitexpression for PoA(f).
8Observe that this adjustment does not play any role, but is required toavoid the use of cumbersome notation in the forthcoming expressions. Else,e.g., f(a+x+1) and w(a+x+1) in (10) will not be defined for a+x = n.

7
Theorem 3 (Dual reformulation of PoA). Given f ∈ F ,the price of anarchy (4) is PoA(f) = 1/W ? , where W ? isthe value of the following (dual) program
W ? = minλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af(a+x)w(a+x)− bf(a+x+1)w(a+x+1)] ≤ 0
∀(a, x, b) ∈ IR(11)
The proof of the previous Theorem (reported in the Ap-pendix) suggests that a further simplification can be madewhen f(j)w(j) is non-increasing for all j. In this case thenumber of constraints reduces to exactly n2, as detailed in thefollowing corollary.
Corollary 1. Consider a given f ∈ F .i) Assume f(j)w(j) non increasing for j ∈ [n]. Then PoA =1/W ?, where
W ? = minλ∈R≥0, µ∈R
µ
s.t. µw(j)≥w(l) + λ[jf(j)w(j)−lf(j+1)w(j+1)]
∀j, l ∈ [0, n], 1 ≤ j + l ≤ n,µw(j)≥w(l)+λ[(n−l)f(j)w(j)−(n−j)f(j+1)w(j+1)]
∀j, l ∈ [0, n], j + l > n.(12)
ii) If additionally f(j) ≥ 1j f(1)w(1)minl∈[n]
lw(l) , then
λ? = maxl∈[n]
w(l)
l
1
f(1)w(1).
Mimicking the proof of the previous corollary (reported inthe Appendix), it is possible to obtain a similar result whenf(j)w(j) is instead non-decreasing. The result is not reportedhere in the interest of conciseness.
Remark 1. Observe that, if the optimal value λ? is known apriori, as in the second statement from the previous corollary,the quantity W ? (and consequently the price of anarchy) canbe computed explicitly from (12) as the maximum betweenn2 real numbers depending on all the entries of f and w.To see this, divide both sides of the constraints in (12) byw(j) for 1 ≤ j ≤ n, and observe that the solution µ? isthen found as the maximum of the resulting right hand side.The corresponding value of W ? is given by the followingexpression.
W ?= max
maxj 6=0
1≤j+l≤nj,l∈[0,n]
w(l)w(j) + λ?[jf(j)− lf(j + 1)w(j+1)
w(j) ]
maxj 6=0
j+l>n
j,l∈[0,n]
w(l)w(j)+λ
?[(n−l)f(j)−(n−j)f(j+1)w(j+1)w(j) ]
(13)Equation (13) is reminiscent of the result obtained using avery different approach in [40, Theorem 6] (limited to Shapleyvalue) and [26, Theorem 3] (limited to set covering problemsand sub budget-balanced utilities).
Finally, observe that for the case of set-covering problemsdiscussed in Section IV (it is w(j) = 1 for all j ∈ [n]) the
assumption i) in the previous corollary reduces to f(j) non in-creasing, while assumption ii) reads as f(j) ≥ f(1)/j. That is,the previous corollary gives us an explicit formula for PoA(f)also for utilities that do not satisfy
∑i∈N ui(a) ≤ W (a), as
instead required in [26]. We discuss further connections withthese results in Part II.
D. Optimizing the Price of Anarchy
Given w and a distribution rule f , Theorem 3 and Corollary1 have reduced the computation of the price of anarchyto the solution of a tractable linear program. Nevertheless,determining the distribution rule maximizing PoA(f), i.e.giving the best performance guarantees, is also a tractablelinear program. The following theorem makes this clear.
Theorem 4 (Optimizing PoA(f) is a linear program). Fora given welfare basis w, the design problem
argmaxf∈F
PoA(f)
is equivalent to the following LP in n+ 1 scalar unknowns
f? ∈ argminf∈F, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+ af(a+x)w(a+x)− bf(a+x+1)w(a+x+1) ≤ 0
∀(a, x, b) ∈ IR(14)
The corresponding optimal price of anarchy is
PoA(f?) =1
µ?,
where µ? is the value of the program (14)
The proof is reported in the Appendix.
Remark 2. The importance of this results stems from itsapplicability for the game design procedure outlined in theIntroduction and in Section II-B. As a matter of fact, Theorem4 allows to compute the optimal distribution rule, for any givenwelfare basis function (satisfying the standing assumptions),and thus to solve the utility design problem. Applications ofthese results are presented in Part II of this work.
VI. CONCLUSIONS
Motivated by resource allocation problems arising in mul-tiagent and networked systems, we showed how to provide a-priori performance guarantees for distributed algorithms basedon a game theoretic approach. With this respect, the papercontains two fundamental results. First, we showed that com-puting the price of anarchy of a resource allocation problem(and thus the approximation ratio of any algorithm capableof determining a Nash equilibrium) is equivalent to solvinga tractable linear program. Second, we showed how to selectutility functions so as to maximize such efficiency measure bymeans of a tractable linear program.

8
APPENDIX APROOF OF THEOREM 1
Proof. i) The claim in Proposition 1 requires f(j) ≤ 1/j,so that we have to restrict to this class of admissible utilityfunctions to apply any smoothness argument. We proceeddividing the proof in two parts. First, we consider the validdistribution rule fSV defined for all j ∈ [n] as fSV(j) := 1/j,and show that the best smoothness parameters are (1, 1−1/n)so that SPoA(fSV) = 1
2−1/n = b(n). Second, we show thatfor any distribution with f(j) ≤ fSV(j) for all j ∈ [n]it holds SPoA(f) ≤ SPoA(fSV). From this, we concludeSPoA(f) ≤ b(n) = 1
2−1/n for all admissible distributionrules.Part 1: with the special choice of fSV, the proof of [26,Theorem 2] shows that for any pair of feasible a, a? and anyG ∈ Gf , it holds∑
i∈Nui(a
?i , a−i) ≥W (a?)− χSVW (a) ,
where χSV = maxj∈[n−1]
{jfSV(j)−fSV(j+1), (n−1)fSV(n)} ,
from which χSV = 1 − 1/n. Thus the game is (1, 1 − 1/n)-smooth and so SPoA(fSV) ≥ 1
2−1/n . To show that there is nobetter pair (λ, µ) we show that the price of anarchy is exactly
12−1/n . To do so, we consider the instance G proposed in[16, Figure S2] and observe that W (aopt) = 2 − 1/n whileW (ane) = 1. Thus, SPoA(fSV) ≤ PoA(fSV) ≤ 1
2−1/n . Sincethe lower and upper bounds obtained for SPoA(fSV) match,we conclude that SPoA(fSV) =
12−1/n .
Part 2: Consider any distribution rule f ∈ F such that f(j) ≤fSV(j) for all j ∈ [n]. Let us define the set
A(f) =
{(λ, µ) s.t. for all a, a? ∈ A, for all G ∈ Gf∑
i∈Nr∈ai
vrf(|(a?i , a−i)|r)w(|(a?i , a−i)|r)≥λW (a?)− µW (a)
},
and analogously for A(fSV). With this notation, the claim weintend to prove reduces to
sup(λ,µ)∈A(f)
λ
1 + µ≤ sup
(λ,µ)∈A(fSV)
λ
1 + µ. (15)
To show the latter, we prove that A(f) ⊆ A(fSV). Considera feasible tuple (λ, µ) ∈ A(f); by definition of A(f) it is∑i∈Nr∈ai
vrf(|(a?i , a−i)|r)w(|(a?i , a−i)|r)≥λW (a?)− µW (a),
∀a, a? ∈ A, G ∈ Gf . Since fSV(j) ≥ f(j), it follows that∑i∈Nr∈ai
vrfSV(|(a?i , a−i)|r)w(|(a?i , a−i)|r)≥λW (a?)− µW (a),
∀a, a? ∈ A, G ∈ Gf . Thus (λ, µ) ∈ A(fSV) too, from whichwe conclude that A(f) ⊆ A(fSV) and (15) must hold.
iii) Follows from the previous claims upon noticing thatb(n) < PoA(fgar) for n > 2 (while b(n) = PoA(fgar) forn = 2).
PROOF OF THEOREM 2
Proof. The proof makes the steps 1-4 introduced in SubsectionV-A formal, with particular attention to the steps 3-4.
Step 1: We intend to show that the price of anarchycomputed over G ∈ Gf is the same of the price of anarchycomputed over a reduced set of games. Consider a gameG ∈ Gf and denote with ane the corresponding worst equilib-rium (as measured by W ) and with aopt an optimal allocationof G. For every such game G, we construct a new game G,where G := (R, {vr}, N, {Ai}, f) and Ai = {anei , a
opti } for
all i ∈ N . That is, the feasible set of every player in G containsonly two allocations: an optimal allocation, and the (worst)equilibrium of G. With slight abuse of notation we write G(G)to describe the game G constructed from G as just discussed.Observe that G and G have the same price of anarchy i.e.
mina∈NE(G)W (a)
maxa∈AW (a)=
mina∈NE(G)W (a)
maxa∈AW (a).
Denote with Gf the class of games Gf := {G(G) ∀G ∈ Gf} .Observe that Gf ⊆ Gf (by definition) and since for every gameG ∈ Gf , it is possible to construct a game G ∈ Gf with thesame price of anarchy, it follows that (4) can be computed as
PoA(f) = infG∈Gf
(mina∈NE(G)W (a)
maxa∈AW (a)
).
Step 2: Lemma 2 ensures for any game G, every equi-librium configuration has strictly positive welfare. Thus, weassume without loss of generality that W (ane) = 1, where ane
represents the worst equilibrium of G.9 The price of anarchyreduces to
PoA(f) = infG∈Gf
1
W (aopt),
s.t. ui(ane) ≥ ui(aopti , ane−i) ∀i ∈ N ,
W (ane) = 1 .
Step 3 and 4: While in Subsection V-A these steps havebeen introduced separately for ease of exposition, their proofis presented jointly here. First observe, from the last equation,that PoA(f) = 1/W ?, where
W ? := supG∈Gf
W (aopt) ,
s.t. ui(ane) ≥ ui(aopti , ane−i) ∀i ∈ N ,
W (ane) = 1 .
(16)
We relax the previous program as in the following
V ? := supG∈Gf
W (aopt) ,
s.t.∑i∈N
ui(ane)− ui(aopti , ane−i) ≥ 0 ,
W (ane) = 1 ,
(17)
9If, for a given game G, this is not the case, it is possible to construct a newgame (by simply rescaling the value of the resources) such that W (ane) = 1.Note that the new game has the same game price of anarchy of G.

9
where the n equilibrium constraints (one per each player) havebeen substituted by their sum. Thus, V ? ≥ W ?, but it alsoholds V ? ≤W ? as Lemma 3 proves, so that V ? =W ?.
In the following we show how to transform (17) in (10)by introducing the variables θ(a, x, b), (a, x, b) ∈ I. Thisparametrization has been introduced to study covering prob-lems in [50], and will be used here to efficiently representthe quantities appearing in (17). To begin with, recall thateach feasible set is composed of only two allocations, thatis Ai = {anei , a
opti }. For any given triplet (a, x, b) in I, we
thus define θ(a, x, b) ∈ R≥0 as the total value of resourcesthat belong to precisely a + x of the sets anei , b + x of thesets aoptj , for which exactly x sets have the same index (i.e.i = j). These (n+ 1)(n+ 2)(n+ 3)/6 variables suffice tofully describe the terms appearing in (17). Indeed, extendingthe formulation of [50] to the welfare defined in (1) and theutilities defined in (2), it is possible to write
W (aopt) =∑
(a,x,b)∈I
1{b+x≥1}w(b+ x)θ(a, x, b) ,
W (ane) =∑
(a,x,b)∈I
1{a+x≥1}w(a+ x)θ(a, x, b) ,
and the relaxed equilibrium constraint∑i∈N
ui(ane)− ui(aopti , ane−i) ≥ 0
reduces to∑i∈N
ui(ane)− ui(aopti , ane−i)
=∑
(a,x,b)∈I
[(a+x)f(a+x)w(a+x)
−bf(a+x+1)w(a+x+1)−xf(a+x)w(a+x)]θ(a, x, b)
=∑
(a,x,b)∈I
[af(a+x)w(a+x)−bf(a+x+1)w(a+x+1)]θ(a, x, b)
≥ 0 .
Substituting the latter expressions in (17), one gets
W ? = supθ(a,x,b)
∑a,x,b
1{b+x≥1}w(b+ x)θ(a, x, b)
s.t.∑a,x,b
[af(a+x)w(a+x)−bf(a+x+1)w(a+x+1)]θ(a, x, b)≥0∑a,x,b
1{a+x≥1}w(a+ x)θ(a, x, b) = 1
θ(a, x, b) ≥ 0 ∀(a, x, b) ∈ I .
To transform the latter expression in (10) (i.e. the desiredresult) it suffices to show that the sup is attained. To see thisobserve that the decision variables θ(a, x, b) live in a compactspace. Indeed θ(a, x, b) are constrained to the positive orthantfor all (a, x, b) ∈ I. Additionally, the decision variables witha+x 6= 0 must be bounded due to the constraint W (ane) = 1∑
(a,x,b)∈Ia+x≥1
w(a+ x)θ(a, x, b) = 1 ,
where w(j) 6= 0 by assumption. Finally, the decision variablesleft, i.e. those of the form θ(0, 0, b), b ∈ [n] are bounded dueto the equilibrium constraint, which can be rewritten as∑b∈[n]
bf(1)w(1)θ(0, 0, b) ≤
∑(a,x,b)∈Ia+x≥1
[af(a+x)w(a+x)−bf(a+x+1)w(a+x+1)]θ(a, x, b),
where f(1)w(1) 6= 0 by assumption.
Lemma 2. For any game G ∈ Gf , it holds
W (ane) > 0 for all ane ∈ NE(G) .
Proof. Let us consider a fixed game G ∈ Gf . By contradiction,let us assume that W (ane) = 0 for some ane ∈ NE(G). Itfollows that all the players must have distributed themselveson resources that are either valued zero, or have selected theempty set allocation (since w(j) > 0). Thus, their utilityfunction must also evaluate to zero. However, by standing as-sumptions, there exists a player p and a resource r ∈ ap ∈ Apwith vr > 0. Observe that no other player is currently selectingthis resource, else W (ane) > 0. If player p was to deviate andselected instead ap, his utility would be strictly positive (sincef(1) > 0). Thus ane is not an equilibrium: a contradiction.Repeating the same reasoning for all games G ∈ Gf yieldsthe claim.
Lemma 3. Consider W ? and V ? defined respectively in (16)and (17). It holds that V ? ≤W ?.
Proof. Since (17) is equivalent to (10) as shown in the proofof Theorem 2, we will work with (10) to prove V ? ≤ W ?.To do so, for any θ(a, x, b), (a, x, b) ∈ I feasible solutionof (10) with value v, we will construct an instance of gameG satisfying the constraints of the original problem (16) too.This allows to conclude that V ? ≤ W ?. To ease the notationwe will use
∑a,x,b in place of
∑(a,x,b)∈I .
Consider θ(a, x, b), (a, x, b) ∈ I a feasible point for (10)with value v. For every (a, x, b) ∈ I and for each i ∈ Nwe create a resource r(a, x, b, i) and assign to it the value ofθ(a, x, b)/n, i.e. vr(a,x,b,i) = θ(a, x, b)/n ∀i ∈ N . We thenconstruct the game G by defining ∀i ∈ N , Ai = {anei , a
opti }
and assigning the resources as follows
anei = ∪nj=1 {r(a, x, b, j) s.t. a+ x ≥ 1 + g(i, j)} ,aopti = ∪nj=1 {r(a, x, b, j) s.t. b+ x ≥ 1 + h(i, j)} ,
where
g(i, j) :=(j − 1 + (n− 1)(i− 1)) mod n ,
=(j − 1) mod n
h(i, j) :=(j + (n− 1)(i− 1)) mod n
=(j − i+ 1) mod n .
We begin by showing W (ane) = 1 and W (aopt) = v. Asidefrom the cumbersome definition of g and h, it is not difficultto verify that for any fixed resource (i.e. for every fixed tuple(a, x, b, j)), there are exactly a + x (resp. b + x) players

10
selecting it while at the equilibrium (resp. optimum) allocation.It follows that
W (ane) =∑j∈[n]
∑a+x>0
vr(a,x,b,j)w(a+ x)
=∑j∈[n]
∑a+x>0
θ(a, x, b)
nw(a+ x)
=∑a,x,b
1{a+x≥1}w(a+ x)θ(a, x, b) = 1 ,
With an identical reasoning, one shows that
W (aopt) =∑j∈[n]
∑b+x>0
vr(a,x,b,j)w(b+ x)
=∑a,x,b
1{b+x≥1}w(b+ x)θ(a, x, b) = v .
Finally, we prove that ane is indeed an equilibrium, i.e. itsatisfies ui(ane) − ui(aopti , ane−i) ≥ 0 for all i ∈ N . Towardsthis goal, we recall that the game under consideration is acongestion game with potential φ : A → R≥0
φ(a) =∑r∈R
|a|r∑j=1
vrw(j)f(j)
It follows that ui(ane)−ui(aopti , ane−i) = φ(ane)−φ(aopti , ane−i)and so we equivalently prove that
φ(ane)− φ(aopti , ane−i) ≥ 0 ∀i ∈ N .
Thanks to the previous observation, according to which everyresource (a, x, b, j) is covered by exactly a+ x players at theequilibrium, we have
φ(ane) =∑j∈[n]
∑a,x,b
θ(a, x, b)
n
a+x∑j=1
w(j)f(j)
=1
n
∑a,x,b
n θ(a, x, b)
a+x∑j=1
w(j)f(j) .
Additionally, observe that there are b resources selected by oneextra agent and a resources selected by one less agent whenmoving from ane to (aopti , ane−i). The remaining resources are
chosen by the same number of agents. It follows that
φ(ane)− φ(aopti , ane−i) =
=1
n
∑a,x,b
n θ(a, x, b)
a+x∑j=1
w(j)f(j)
− 1
n
∑a,x,b
θ(a, x, b)
(b
a+x+1∑j=1
w(j)f(j)
+ a
a+x−1∑j=1
w(j)f(j) + (n− a− b)a+x∑j=1
w(j)f(j)
)
=1
n
∑a,x,b
θ(a, x, b)
((a+ b)
a+x∑j=1
w(j)f(j)
− aa+x−1∑j=1
w(j)f(j)− ba+x+1∑j=1
w(j)f(j)
)
=1
n
∑a,x,b
θ(a, x, b)
(aw(a+x)f(a+x)−bw(a+x+1)f(a+x+1)
)=∑a,x,b
[af(a+x)w(a+x)−bf(a+x+1)w(a+x+1)]θ(a, x, b)≥0 ,
where the inequality holds because θ(a, x, b) is assumedfeasible for (10). This concludes the proof.
PROOF OF THEOREM 3
Proof. We divide the proof in two steps: i) writing the dual ofthe original program in Equation (10); ii) showing that onlythe constraints obtained for (a, x, b) ∈ IR are binding.i) Upon stacking the decision variables θ(a, x, b) in the vectory ∈ R`, ` = (n+ 3)(n+ 2)(n+ 1)/6, and after properlydefining the coefficients c, d, e ∈ R`, the program (10) can becompactly written as
W ? =maxy
c>y
s.t. − e>y ≤ 0 , (λ)
d>y − 1 = 0 , (µ)
− y ≤ 0 . (ν)
The Lagrangian function is defined for λ ≥ 0, ν ≥ 0 asL(y, λ, µ, ν) = c>y − λ(−e>y) − µ(d>y − 1) − ν>(−y) =(c>+λe>+ ν −µd>)y+µ, while the dual function reads as
g(λ, µ, ν) = µ if c> + λe> + ν> − µd> = 0 ,
and it is unbounded elsewhere. Hence the dual program takesthe form
minλ∈R≥0, µ∈R
µ
s.t. c+ λe− µd ≤ 0 ,
which corresponds, in the original variables, to
minλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af(a+x)w(a+x)− bf(a+x+1)w(a+x+1)] ≤ 0
∀(a, x, b) ∈ I .
(18)

11
By strong duality10, the value of (10) matches (18).ii) In this step we show that only the constraints with(a, x, b) ∈ IR are necessary in (18), thus obtaining (11).
Observe that when (a, x, b) ∈ I and a+ x = 0, b can takeany value 1 ≤ b ≤ n, and these indices are already includedin IR. Similarly for the indices (a, x, b) ∈ I with b+ x = 0.Thus, we focus on the remaining constraints, i.e. those witha + x 6= 0 and b + x 6= 0. We change the coordinates fromthe original indices (a, x, b) to (j, x, l), j := a+x, l := b+x.The constraints in (18) now read as
µw(j)≥w(l)+λ[(j−x)f(j)w(j)−(l−x)f(j+1)w(j+1)] ,
= w(l) + λ[jf(j)w(j)− lf(j + 1)w(j + 1)
+ x(f(j + 1)w(j + 1)− f(j)w(j))](19)
where (j, x, l) ∈ I and I = {(j, x, l) ∈ N3≥0 s.t. 1 ≤ j −
x+ l ≤ n, j ≥ x, l ≥ x, j, l 6= 0}. In the remaining of thisproof we consider j fixed, while l, x are free to move withinI. This corresponds to moving the indices in the rectangularregion defined by the blue and green patches in Figures 3, 4.Observe that for j = n it must be l = x (since −x + l ≤ 0and l − x ≥ 0) i.e. in the original coordinates b = 0, whichrepresents the segment on the plane b = 0 with a + x = n.These indices already belong to IR. Thus, we consider thecase j 6= n and divide the reasoning in two parts.
a) Case of f(j + 1)w(j + 1) ≤ f(j)w(j).The term f(j + 1)w(j + 1)− f(j)w(j) is non-positive andso the most binding constraint in (19) is obtained pickingx as small as possible. In the following we fix l as well(recall that we have previously fixed j). This correspondsto considering points on a black line on the plane j =constin Figure 3). Since it must be x ≥ 0 and x ≥ j + l− n, forfixed j and l we set x = max{0, j+ l−n}. In the followingwe show that these constraints are already included in (11).- When j+ l ≤ n i.e. when a+ b+2x ≤ n, we set x = 0.
These indices correspond to points on the plane x = 0,(1 ≤ a + b ≤ n) bounding the pyramid and so they arealready included in IR.
- When j + l > n i.e. When a + b + 2x > n, we setx = j+l−n, i.e. a+b+x = n. These indices correspondto points on the plane a + b + x = n, and so they areincluded in IR too.
b) Case of f(j + 1)w(j + 1) > f(j)w(j).The term f(j + 1)w(j + 1) − f(j)w(j) is positive and sothe most binding constraint in (19) is obtained picking xas large as possible. In the following (after having fixed j)we fix l as well (this means we are moving on a black lineon the plane j =const in the Figure 4). Since it must bex ≤ l, x ≤ j and x ≤ j + l − 1, we set x = min{j, l}.In the following we show that these constraints are alreadyincluded in (11).- When j ≤ l i.e. when a ≤ b, we set x = j i.e. a = 0.
These indices correspond to points on the plane a = 0,(1 ≤ x+ b ≤ k) and so they are included in IR.
10The primal LP (10) is always feasible, since θ(0, 1, 0) = 1/w(1),θ(a, x, b) = 0 ∀ (a, x, b) ∈ I \ (0, 1, 0) satisfies all the constraints in (10)
a
x
b
a+ x+ b = nl =const
a+ 2x+ b = n
j + l = n
j =constj + l ≥ nj =const
j + l < n
1
Fig. 3. Indices representation for case a).
- When j > l i.e. when a > b, then we set x = l, i.e.b = 0. These indices correspond to points on the planeb = 0, (1 ≤ a+ b ≤ k) and so they are included in IR.
a
x
b
a+ x+ b = nl =const
a = b
j = l
j =constj > lj =const
j ≤ l
1
Fig. 4. Indices representation for case b).
PROOF OF COROLLARY 1
Proof. i) Following the proof of Theorem 3 (part ii, case a)),one can see that if f(j)w(j) is non increasing for j ∈ N , theonly binding indices are those lying on the the two surfacesx = 0, 1 ≤ a+ b ≤ n and a+ x+ b ≤ n. The surface x = 0,1 ≤ a+ b ≤ n gives
µw(j) ≥ w(l) + λ[jf(j)w(j)− lf(j + 1)w(j + 1)] (20)
for 1 ≤ j + l ≤ n and j, l ∈ [0, n], where we used j, l insteadof a, b. The surface a+ x+ b = n gives
µw(n− b) =λ[af(n− b)w(n− b)− bf(n− b+ 1)w(n− b+ 1)]
+ w(n− a)
which can be written as
µw(j) ≥ w(l)+λ[(n− l)f(j)w(j)− (n−j)f(j+1)w(j+1)](21)
for j + l > n and j, l ∈ [0, n], where we have used the samechange of coordinates of the proof of Theorem 3 i.e. j =a + x = n − b, l = b + x = n − a. Thus, we conclude that

12
(20) and (21) are sufficient to describe the constraints in (11),and the result follows.
ii) First, observe that for j = 0, it must be l ∈ [n].Additionally, note that the second set of constraints (thosewith j + l > n) is empty. The first set of constraints yieldsλ ≥ w(l)
l1
f(1)w(1) for l ∈ [n]. Define
λ? = maxl∈[n]
w(l)
l
1
f(1)w(1),
and observe that any feasible λ must satisfy λ ≥ λ?. Second,observe that for l = 0, it must be j ∈ [n]. Additionally, thesecond set of constraints (those with j+ l > n) is empty. Thefirst set of constraints yields µ ≥ λjf(j) for j ∈ [n].
In the following we show that the most binding constraintamongst all those in (12) is of the form µ ≥ αλ + β, withα ≥ 0 (i.e. the most binding constraint is a straight line inthe (λ, µ) plane pointing north-east). Consequently, the bestchoice of λ so as to satisfy the constraints and minimize µ isto select λ as small as possible, i.e. λ = λ?. See Figure 5 foran illustrative plot.
�
µ
(�?, µ?)
Constraints (0, l)
Constraints (j, 0)
Constraints (j, l)with j, l 6= 0
Feasible region
1
Fig. 5. Illustration of the three classes of constraints used in the proof ofCorollary 1.
As shown previously, the constraints with j = 0 are straightlines parallel to the µ axis, while the constraints with l = 0 arestraight line of the form µ ≥ λjf(j) (and thus point north-eastin the (λ, µ) plane). We are thus left to check the constraintswith j 6= 0 and l 6= 0.
To do so, we prove that if one such constraint (identified bythe indices (j, l)) has negative slope, the constraint identifiedwith (j, 0) is more binding. Since the constraint (j, 0) is ofthe form µ ≥ jλjf(j) (and thus has non-negative slope), thiswill conclude the proof. We split the reasoning depending onwether 1 ≤ j + l ≤ n or j + l > n as the constraints in (12)have a different expression.
- Case of 1 ≤ j + l ≤ n: to complete the reasoning, in thefollowing we assume that jf(j) − lf(j + 1)w(j+1)
w(j) < 0, andshow that the constraint (j, 0) is more binding i.e. that
λjf(j) ≥ w(l)
w(j)+ λjf(j)− λlf(j + 1)
w(j + 1)
w(j),
which is equivalent to showing
w(l)
w(j)− λlf(j + 1)
w(j + 1)
w(j)≤ 0 . (22)
Since jf(j)− lf(j + 1)w(j+1)w(j) < 0 it must be
l > jf(j)w(j)
f(j + 1)w(j + 1)≥ j ,
by non-increasingness of f(j)w(j). Thus it must be l ≥ j + 1.Consequently, by non-increasingness of f(j)w(j) it is w(l) ≤f(j + 1)w(j + 1)/f(l) and we can bound the left hand sideof (22) as
w(l)
w(j)− λlf(j + 1)
w(j + 1)
w(j)
≤ f(j + 1)w(j + 1)
w(j)f(l)− λl f(j + 1)w(j + 1)
w(j)
=f(j + 1)w(j + 1)
f(j)w(j)
(1
f(l)− λl
)f(j)
≤(
1
f(l)− λl
)f(j) ,
where the last inequality holds by non-increasingness off(j)w(j). The claim (22) is shown upon noticing that f(l) ≥1l minl∈[n]
lw(l)f(1)w(1) =
1lλ? (by assumption), and thus(
1
f(l)− λl
)f(j) ≤ (λ? − λ) lf(j) ≤ 0 ,
since we have already shown that λ ≥ λ? for every feasible λ.- Case of j + l > n: to complete the proof we proceed in a
similar fashion to what seen in the previous case. In particular,we assume that (n− l)f(j)− (n− j)f(j+1)w(j+1)
w(j) < 0, andshow that the constraints (j, 0) is more binding, i.e. that
w(l)
w(j)+ λ(n− l− j)f(j)− λ(n− j)f(j + 1)
w(j + 1)
w(j)) ≤ 0 .
(23)Since (n− l)f(j)− (n− j)f(j + 1)w(j+1)
w(j) < 0, it must be
n− j > (n− l) f(j)w(j)
f(j + 1)w(j + 1)≥ n− l
by non-increasingness of f(j)w(j). Thus it must be l ≥ j + 1.Consequently, by non-increasingness of f(j)w(j) we canbound the left hand side of (23) as
w(l)
w(j)+ λ(n− l − j)f(j)− λ(n− j)f(j + 1)
w(j + 1)
w(j)
≤f(j+1)w(j+1)w(j)f(l)
+λ(n−l−j)f(j)−λ(n−j)f(j+1)w(j+1)
w(j)
=f(j+1)w(j+1)
w(j)f(j)
(1
f(l)−λ(n−j)
)f(j)+λ(n−l−j)f(j)
≤ f(j)
f(l)− λ(n− j − n+ l + j)f(j) =
(1
f(l)− λl
)≤ 0 ,
where the chain of inequality is proven similarly to what donein the case of 1 ≤ j + l ≤ n, using the non-decreasingness off(j)w(j) and the fact that f(l) ≥ 1
lλ? by assumption.
PROOF OF THEOREM 4
Proof. We first observe that the problem argmaxf∈F PoA(f)is well posed, in the sense that the supremum supf∈F PoA(f)is attained for some f ∈ F . A proof of this is reported in thefollowing Lemma 4.

13
The (well posed) problem argmaxf∈F PoA(f) is equiva-lent to finding the distribution rule that minimizes W ? givenin Theorem 3, i.e.
f? ∈ argminf∈F
minλ∈R≥0, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[af(a+x)w(a+x)− bf(a+x+1)w(a+x+1)] ≤ 0
∀(a, x, b) ∈ IR .
The previous program is non linear, but the decision variablesλ and f always appear multiplied together. Thus, we definef(j) := λf(j) for all j ∈ [0, n + 1] and observe that theconstraint obtained in (11) for (a, x, b) = (0, 0, 1) givesf(1) = λf(1) ≥ 1, which also implies λ ≥ 1/f(1) > 0since f(1) > 0 (by assumption of f ∈ F). Folding the minoperators gives
f? ∈ argminf∈Rn
≥0
f(1)≥1, µ∈R
µ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+ af(a+x)w(a+x)− bf(a+x+1)w(a+x+1) ≤ 0
∀(a, x, b) ∈ IR .(24)
Finally, observe that f? is feasible for the original program,since f? ∈ F . Additionally, we note that f? and f? givethe same price of anarchy (since f(j) = λf(j), λ > 0 andthe equilibrium conditions are invariant to rescaling). Thus f?
solving (24) must be optimal. The optimal price of anarchyvalue follows.
Lemma 4. The supremum supf∈F PoA(f) is attained in F .
Proof. Recall that F is defined as follows
F := {f : [n]→ R≥0 s.t. f(1) ≥ 1, f(j) ≥ 0 ∀j ∈ [n]}.
To conclude, we show that any distribution f? achieving aperformance equal to supf∈F PoA(f) is bounded (i.e. all thecomponents are bounded), so that it must be f? ∈ F . To do so,consider a fixed distribution f ∈ F , and construct from it fM .The distribution fM is defined as follows: fM (j) = M , withM ∈ R≥0 for some fixed j ∈ [n], while it exactly matchesf for the remaining components. In the following we showthat there exists M ∈ R≥0 such that PoA(fM ) < PoA(f)for all M ≥ M . Thus fM can not attain supf∈F PoA(f) forM ≥ M as the corresponding f would give a better priceof anarchy. Repeating this reasoning for any f ∈ F , oneconcludes that the distribution rule achieving supf∈F PoA(f)must be bounded along the j-th component. Repeating thereasoning for all possible j ∈ [n], one obtains the claim.
To conclude we are left to show that ∃M ∈ R≥0 such thatPoA(fM ) < PoA(f) for all M ≥ M . To do so, observe thatthe price of anarchy of f ∈ F can be computed as PoA(f) =1/W ?, where W ? is the solution to the primal problem in(10). Since the decision variables of (10) live in a compactspace (and the primal is feasible, see the footnote in the proofof Theorem 3), we have W ? < +∞ and so PoA(f) > 0 i.e.
PoA(f) is bounded away from zero. On the other hand, thanksto Theorem 3, the price of anarchy of fM can be computedfor any M as PoA(fM ) = 1/W ?
M , where
W ?M = min
λ∈R≥0, µ∈Rµ
s.t. 1{b+x≥1}w(b+x)− µ1{a+x≥1}w(a+x)+
+λ[afM (a+x)w(a+x)− bfM (a+x+1)w(a+x+1)] ≤ 0
∀(a, x, b) ∈ IR
First, observe that for any feasible λ, it must be λ ≥ 1fM (1) ,
else the constraints obtained form the previous linear programwith a = x = 0, b = 1 would be infeasible. Further, considerthe constraints with b = 0, x = 0, a = j ≥ 1. They amount to
µ ≥ λjfM (j) ≥ j
fM (1)fM (j) =
jM
fM (1),
where fM (1) > 0 by standing assumptions and fM ∈ F . Itfollows that
PoA(fM ) =1
W ?M
≤ fM (1)
jM.
Thus, it is possible to make PoA(fM ) arbitrarily close to zero,by selecting M sufficiently large. It follows that ∃M ∈ R≥0such that PoA(fM ) < PoA(f) for all M ≥ M , sincePoA(f) is bounded away from zero, as previously argued.This concludes the proof.
REFERENCES
[1] H.-B. Kuntze, C. W. Frey, I. Tchouchenkov, B. Staehle, E. Rome,K. Pfeiffer, A. Wenzel, and J. Wollenstein, “Seneka-sensor network withmobile robots for disaster management,” in Homeland Security (HST),2012 IEEE Conference on Technologies for. IEEE, 2012, pp. 406–410.
[2] H. Kitano, S. Tadokoro, I. Noda, H. Matsubara, T. Takahashi, A. Shinjou,and S. Shimada, “Robocup rescue: Search and rescue in large-scaledisasters as a domain for autonomous agents research,” in Systems, Man,and Cybernetics, 1999. IEEE SMC’99 Conference Proceedings. 1999IEEE International Conference on, vol. 6. IEEE, 1999, pp. 739–743.
[3] T. Kozai, G. Niu, and M. Takagaki, Plant factory: an indoor verticalfarming system for efficient quality food production. Academic Press,2015.
[4] K. Spieser, K. Treleaven, R. Zhang, E. Frazzoli, D. Morton, andM. Pavone, “Toward a systematic approach to the design and evaluationof automated mobility-on-demand systems: A case study in singapore,”in Road vehicle automation. Springer, 2014, pp. 229–245.
[5] A. Servant, F. Qiu, M. Mazza, K. Kostarelos, and B. J. Nelson,“Controlled in vivo swimming of a swarm of bacteria-like microroboticflagella,” Advanced Materials, vol. 27, no. 19, pp. 2981–2988, 2015.
[6] K. Ishiyama, M. Sendoh, and K. Arai, “Magnetic micromachines formedical applications,” Journal of Magnetism and Magnetic Materials,vol. 242, pp. 41–46, 2002.
[7] N. Li and J. R. Marden, “Designing games for distributed optimization,”IEEE Journal of Selected Topics in Signal Processing, vol. 7, no. 2, pp.230–242, 2013.
[8] R. D’Andrea and G. E. Dullerud, “Distributed control design for spa-tially interconnected systems,” IEEE Transactions on Automatic Control,vol. 48, no. 9, pp. 1478–1495, Sept 2003.
[9] J. Cortes, S. Martinez, T. Karatas, and F. Bullo, “Coverage controlfor mobile sensing networks,” in Robotics and Automation, 2002.Proceedings. ICRA ’02. IEEE International Conference on, vol. 2, 2002,pp. 1327–1332.
[10] A. Nedic and A. Ozdaglar, “Distributed subgradient methods for multi-agent optimization,” IEEE Transactions on Automatic Control, vol. 54,no. 1, pp. 48–61, 2009.
[11] E. Wei, A. Ozdaglar, and A. Jadbabaie, “A distributed newton methodfor network utility maximization–i: Algorithm,” IEEE Transactions onAutomatic Control, vol. 58, no. 9, pp. 2162–2175, 2013.
[12] J. S. Shamma, Cooperative control of distributed multi-agent systems.Wiley Online Library, 2007.

14
[13] G. Arslan, J. R. Marden, and J. S. Shamma, “Autonomous vehicle-target assignment: A game-theoretical formulation,” Journal of DynamicSystems, Measurement, and Control, vol. 129, no. 5, pp. 584–596, 2007.
[14] J. R. Marden and A. Wierman, “Distributed welfare games,” OperationsResearch, vol. 61, no. 1, pp. 155–168, 2013.
[15] J. R. Marden, G. Arslan, and J. S. Shamma, “Cooperative control andpotential games,” IEEE Transactions on Systems, Man, and Cybernetics,Part B (Cybernetics), vol. 39, no. 6, pp. 1393–1407, Dec 2009.
[16] V. Ramaswamy, D. Paccagnan, and J. Marden, “The impact of localinformation on the performance of multiagent systems,” ArXiv preprintarXiv:1710.01409, 2018.
[17] P. Gebraad, F. Teeuwisse, J. Wingerden, P. A. Fleming, S. Ruben,J. Marden, and L. Pao, “Wind plant power optimization through yawcontrol using a parametric model for wake effects-a cfd simulationstudy,” Wind Energy, vol. 19, no. 1, pp. 95–114, 2016.
[18] L. E. Blume, “The statistical mechanics of strategic interaction,” Gamesand economic behavior, vol. 5, no. 3, pp. 387–424, 1993.
[19] D. Fudenberg and D. K. Levine, The theory of learning in games. MITpress, 1998, vol. 2.
[20] J. R. Marden and J. S. Shamma, “Revisiting log-linear learning: Asyn-chrony, completeness and payoff-based implementation,” Games andEconomic Behavior, vol. 75, no. 2, pp. 788–808, 2012.
[21] D. Paccagnan, B. Gentile, F. Parise, M. Kamgarpour, and J. Lygeros,“Nash and wardrop equilibria in aggregative games with couplingconstraints,” IEEE Transactions on Automatic Control, pp. 1–1, 2018.
[22] ——, “Distributed computation of generalized nash equilibria inquadratic aggregative games with affine coupling constraints,” in De-cision and Control (CDC), 2016 IEEE 55th Conference on, 2016, pp.6123–6128.
[23] P. Yi and L. Pavel, “A distributed primal-dual algorithm for computa-tion of generalized nash equilibria via operator splitting methods,” inDecision and Control (CDC), 2017 IEEE 56th Annual Conference on.IEEE, 2017, pp. 3841–3846.
[24] T. Roughgarden, “Intrinsic robustness of the price of anarchy,” inProceedings of the forty-first annual ACM symposium on Theory ofcomputing. ACM, 2009, pp. 513–522.
[25] J. R. Marden and M. Effros, “The price of selfishness in networkcoding,” IEEE Transactions on Information Theory, vol. 58, no. 4, pp.2349–2361, 2012.
[26] M. Gairing, “Covering games: Approximation through non-cooperation,”in International Workshop on Internet and Network Economics.Springer, 2009, pp. 184–195.
[27] N. R. Devanur and K. Jain, “Online matching with concave returns,” inProceedings of the forty-fourth annual ACM symposium on Theory ofcomputing. ACM, 2012, pp. 137–144.
[28] D. Paccagnan, M. Kamgarpour, and J. Lygeros, “On aggregative andmean field games with applications to electricity markets,” in 2016European Control Conference (ECC), June 2016, pp. 196–201.
[29] E. Koutsoupias and C. Papadimitriou, “Worst-case equilibria,” in Pro-ceedings of the 16th Annual Conference on Theoretical Aspects ofComputer Science, ser. STACS’99. Berlin, Heidelberg: Springer-Verlag,1999, pp. 404–413.
[30] T. Roughgarden, Selfish routing and the price of anarchy. MIT Press,2005, vol. 174.
[31] T. Roughgarden, V. Syrgkanis, and E. Tardos, “The price of anarchy inauctions,” Journal of Artificial Intelligence Research, vol. 59, pp. 59–101, 2017.
[32] G. L. Nemhauser, L. A. Wolsey, and M. L. Fisher, “An analysis of ap-proximations for maximizing submodular set functions-i,” MathematicalProgramming, vol. 14, no. 1, pp. 265–294, 1978.
[33] J. F. Nash, “Equilibrium points in n-person games,” Proceedings of theNational Academy of Sciences, vol. 36, no. 1, pp. 48–49, 1950.
[34] D. Monderer and L. S. Shapley, “Potential games,” Games and economicbehavior, vol. 14, no. 1, pp. 124–143, 1996.
[35] C. Soto, B. Song, and A. K. Roy-Chowdhury, “Distributed multi-targettracking in a self-configuring camera network,” in Computer Vision andPattern Recognition, 2009. CVPR 2009. IEEE Conference on. IEEE,2009, pp. 1486–1493.
[36] A. C. Chapman, A. Rogers, N. R. Jennings, and D. S. Leslie, “Aunifying framework for iterative approximate best-response algorithmsfor distributed constraint optimization problems 1,” The KnowledgeEngineering Review, vol. 26, no. 4, pp. 411–444, 2011.
[37] Y. Song, S. H. Wong, and K.-W. Lee, “Optimal gateway selectionin multi-domain wireless networks: A potential game perspective,” inProceedings of the 17th annual international conference on Mobilecomputing and networking. ACM, 2011, pp. 325–336.
[38] J. R. Marden and J. S. Shamma, Game-Theoretic Learning in DistributedControl. Springer International Publishing, 2018, pp. 1–36.
[39] J. R. Marden and M. Philips, “Optimizing the price of anarchy inconcave cost sharing games,” in 2017 American Control Conference(ACC), May 2017, pp. 5237–5242.
[40] J. R. Marden and T. Roughgarden, “Generalized efficiency boundsin distributed resource allocation,” IEEE Transactions on AutomaticControl, vol. 59, no. 3, pp. 571–584, 2014.
[41] M. Philips, Y. Shalaby, and J. R. Marden, “The importance of budgetin efficient utility design,” in Decision and Control (CDC), 2016 IEEE55th Conference on. IEEE, 2016, pp. 6117–6122.
[42] A. S. Schulz and N. Moses, “On the performance of user equilibria intraffic networks,” in Proc. 14th Symp. Discrete Algorithms, 2003, p. 86.
[43] H. Moulin and S. Shenker, “Strategyproof sharing of submodular costs:budget balance versus efficiency,” Economic Theory, vol. 18, no. 3, pp.511–533, 2001.
[44] F. P. Ramsey, “A contribution to the theory of taxation,” The EconomicJournal, vol. 37, no. 145, pp. 47–61, 1927.
[45] U. Nadav and T. Roughgarden, “The limits of smoothness: A primal-dual framework for price of anarchy bounds,” in International Workshopon Internet and Network Economics. Springer, 2010, pp. 319–326.
[46] V. Bilo, “A unifying tool for bounding the quality of non-cooperativesolutions in weighted congestion games,” in International Workshop onApproximation and Online Algorithms. Springer, 2012, pp. 215–228.
[47] J. Kulkarni and V. Mirrokni, “Robust price of anarchy bounds via lp andfenchel duality,” in Proceedings of the twenty-sixth annual ACM-SIAMsymposium on Discrete algorithms. SIAM, 2014, pp. 1030–1049.
[48] N. K. Thang, “Game efficiency through linear programming duality,”arXiv preprint arXiv:1708.06499, 2017.
[49] T. Roughgarden and F. Schoppmann, “Local smoothness and the priceof anarchy in splittable congestion games,” Journal of Economic Theory,vol. 156, pp. 317–342, 2015.
[50] J. Ward, “Oblivious and non-oblivious local search for combinatorialoptimization,” Ph.D. dissertation, University of Toronto (Canada), 2012.
Dario Paccagnan is a doctoral student at the Auto-matic Control Laboratory, ETH Zurich, Switzerland,since October 2014. He received his B.Sc. and M.Sc.in Aerospace Engineering from the University ofPadova, Italy, in 2011 and 2014. In the same yearhe received the M.Sc. in Mathematical Modellingfrom the Technical University of Denmark, all withHonours. His Master’s Thesis was prepared whenvisiting Imperial College of London, UK, in 2014.From March to August 2017 he has been a visitingscholar at the University of California, Santa Bar-
bara. Dario is recipient of the SNSF fellowship for his work in DistributedOptimization and Game Design. His research interests are at the interfacebetween distributed control and game theory. Applications include multiagentsystems, smart cities and traffic networks.
Rahul Chandan is a PhD student in the Electricaland Computer Engineering Department at the Uni-versity of California, Santa Barbara since September2017. He received his BASc in Electrical and Com-puter Engineering from the University of Torontoin June 2017. Rahul’s research interests lie in theapplication of game theoretic and classical controlmethods to the analysis and control of multiagentsystems.

15
Jason Marden is an Associate Professor in the De-partment of Electrical and Computer Engineering atthe University of California, Santa Barbara. Jason re-ceived a BS in Mechanical Engineering in 2001 fromUCLA, and a PhD in Mechanical Engineering in2007, also from UCLA, under the supervision of JeffS. Shamma, where he was awarded the OutstandingGraduating PhD Student in Mechanical Engineering.After graduating from UCLA, he served as a juniorfellow in the Social and Information Sciences Labo-ratory at the California Institute of Technology until
2010 when he joined the University of Colorado. Jason is a recipient of theNSF Career Award (2014), the ONR Young Investigator Award (2015), theAFOSR Young Investigator Award (2012), the American Automatic ControlCouncil Donald P. Eckman Award (2012), and the SIAG/CST Best SICONPaper Prize (2015). Jason’s research interests focus on game theoretic methodsfor the control of distributed multiagent systems.