CPSC-608 Database Systems Fall 2010 Instructor: Jianer Chen Office: HRBB 315C Phone: 845-4259 Email:...
66
CPSC-608 Database Systems Fall 2010 Instructor: Jianer Chen Office: HRBB 315C Phone: 845-4259 Email: [email protected] 1 Notes #9
-
date post
20-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of CPSC-608 Database Systems Fall 2010 Instructor: Jianer Chen Office: HRBB 315C Phone: 845-4259 Email:...
CPSC-608 Database SystemsFall
2010
Instructor: Jianer ChenOffice: HRBB 315CPhone: 845-4259
Email: [email protected]
1
Notes #9

LQP Optimization with Size
2
LQP Optimization with Size
Two techniques:
3

LQP Optimization with Size
Two techniques:
• Estimating sizes of immediate relations
For natural join:
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
4
LQP Optimization with Size
Two techniques:
• Estimating sizes of immediate relations
For natural join:
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
• Consider different order of an operation (((R S) T) U) = (R U) (S T)
5
Consider:
A(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200
B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000
D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
We want to have a good LQP for A B C D
6
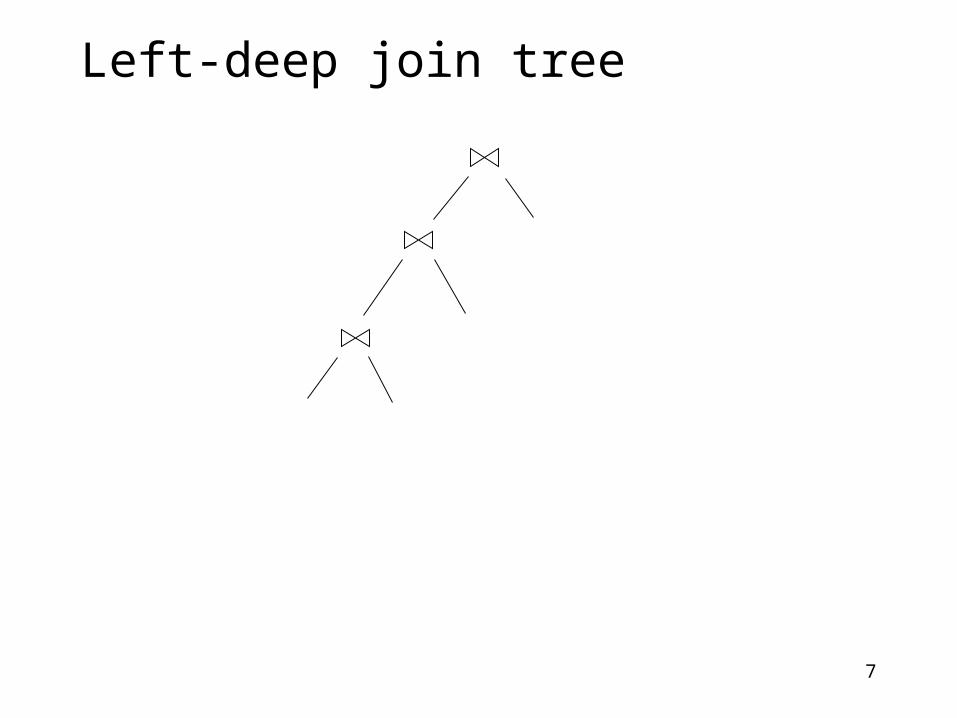
Left-deep join tree
7
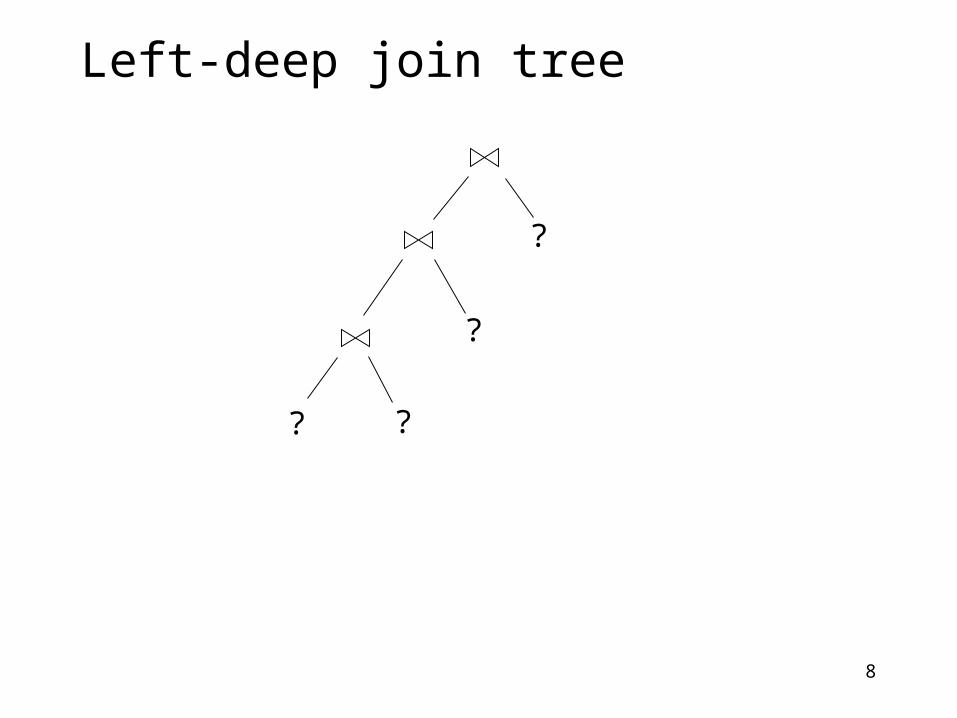
Left-deep join tree
8
? ?
?
?
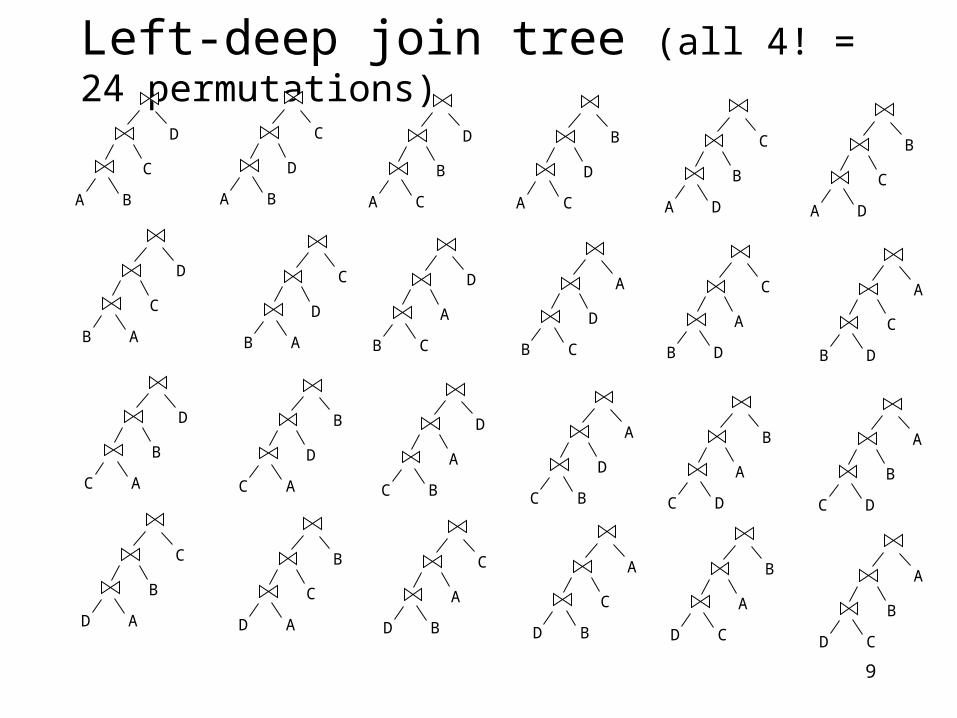
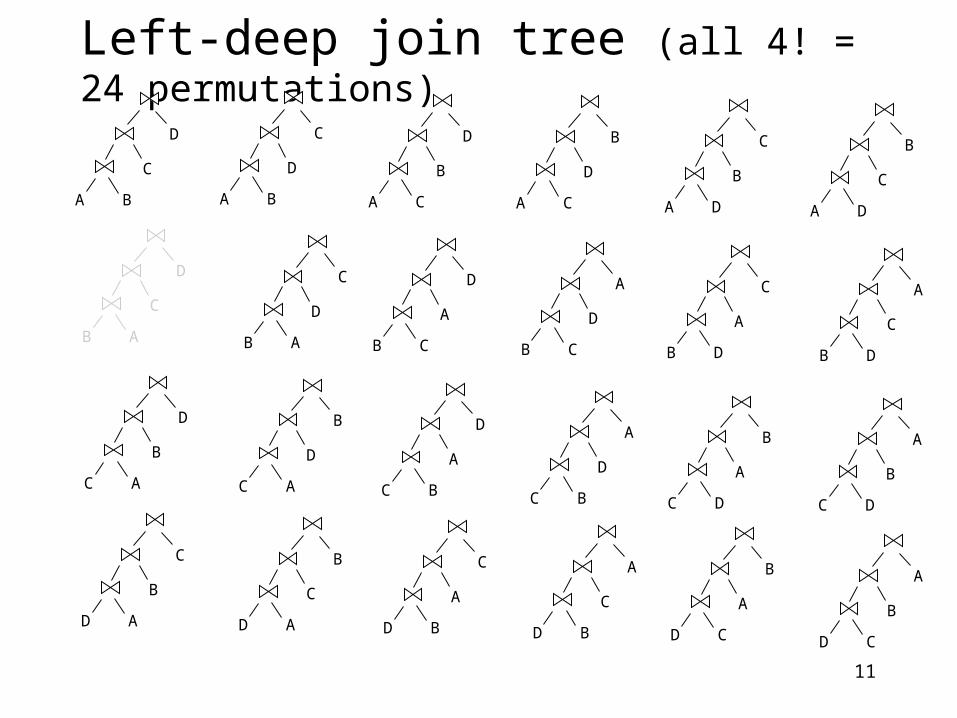
Left-deep join tree (all 4! = 24 permutations)
9
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B

Left-deep join tree (all 4! = 24 permutations)
10
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B
Left-deep join tree (all 4! = 24 permutations)
11
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B
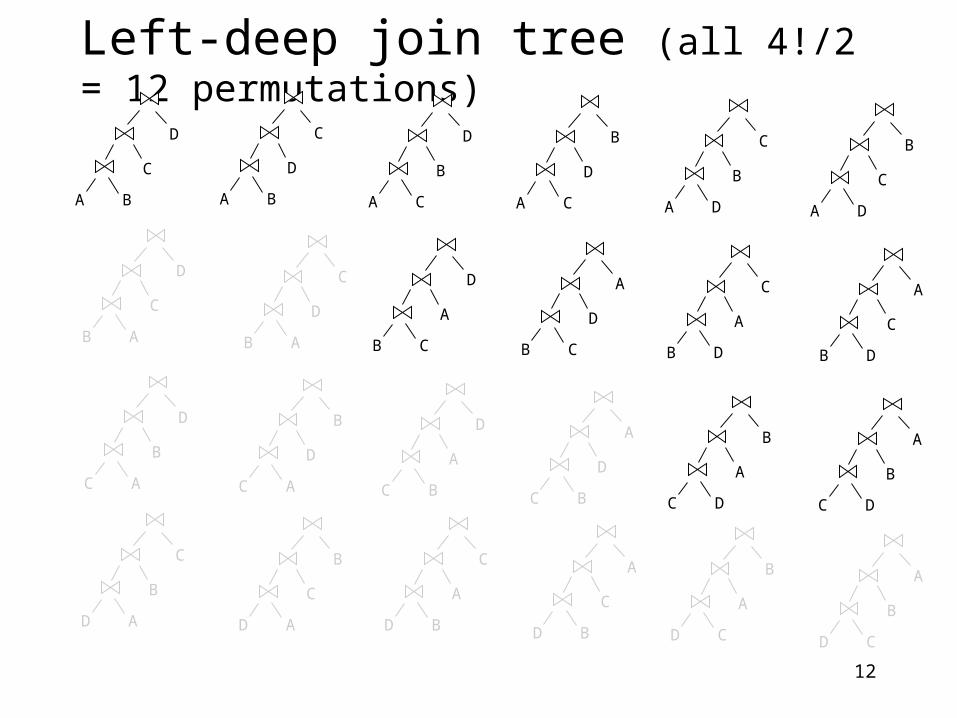
Left-deep join tree (all 4!/2 = 12 permutations)
12
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B
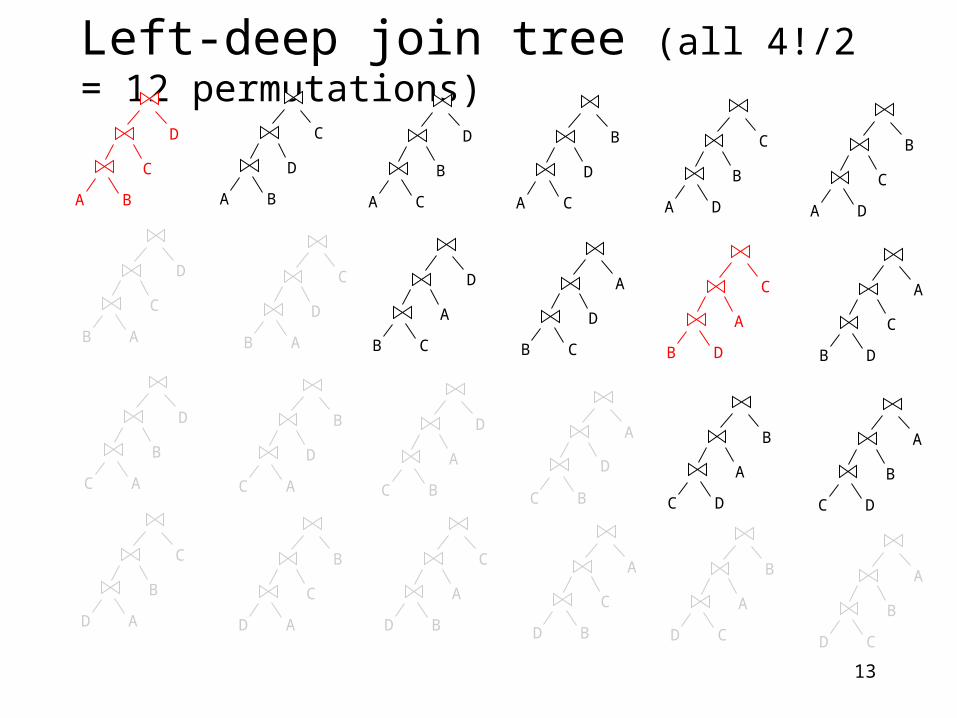
Left-deep join tree (all 4!/2 = 12 permutations)
13
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B
Left-deep join tree
14
A B
C
D
B D
A
C
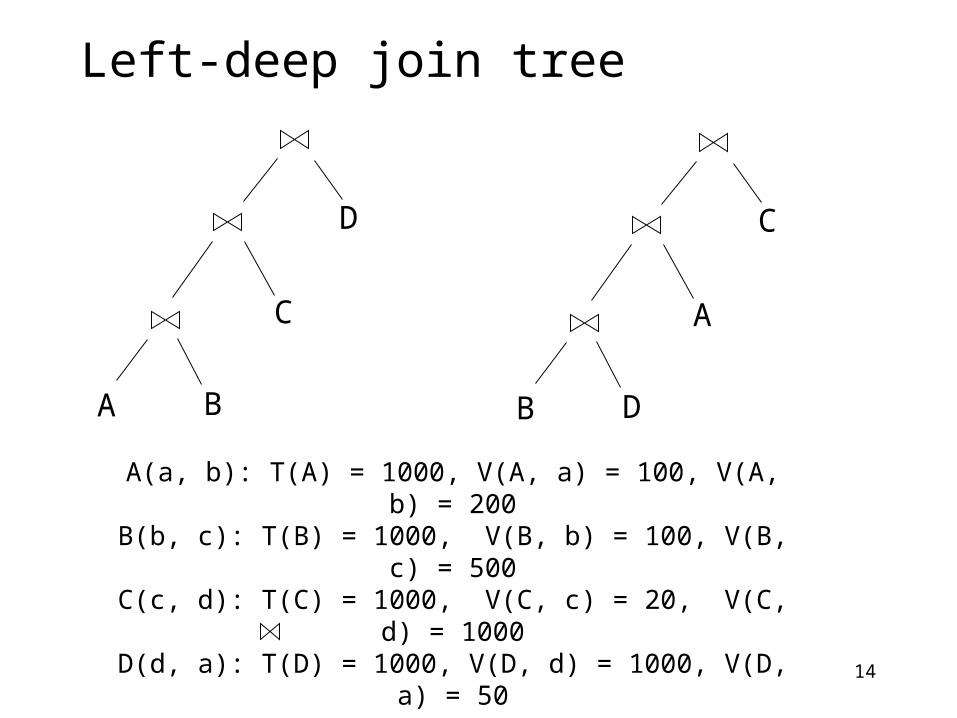
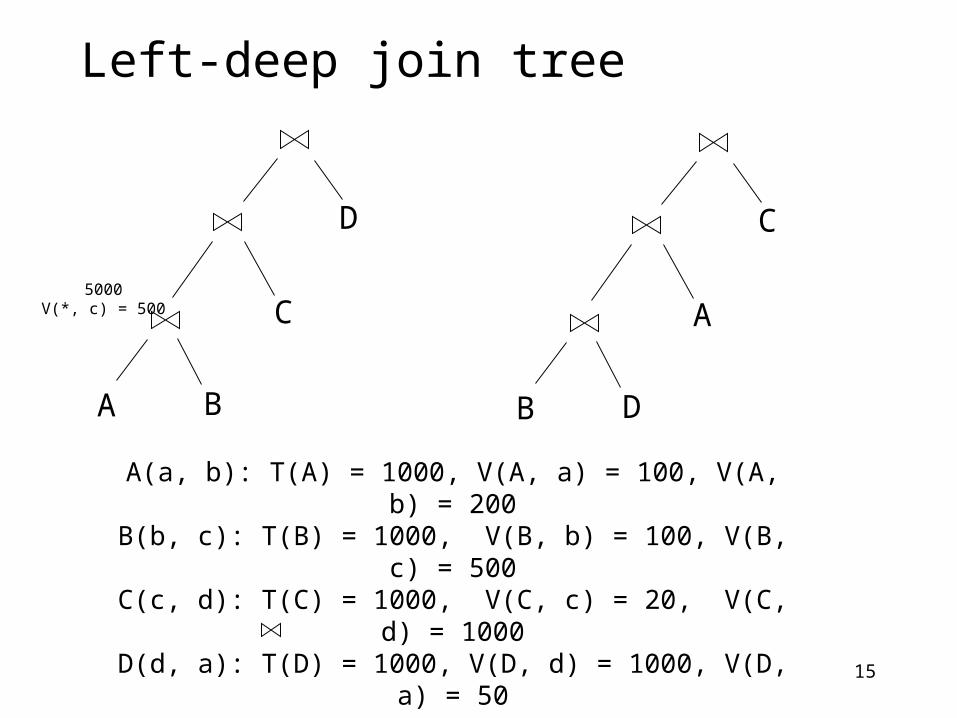
A(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
Left-deep join tree
15
A B
C
D
B D
A
C
A(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)} 5000
V(*, c) = 500
Left-deep join tree
16
A B
C
D
B D
A
C
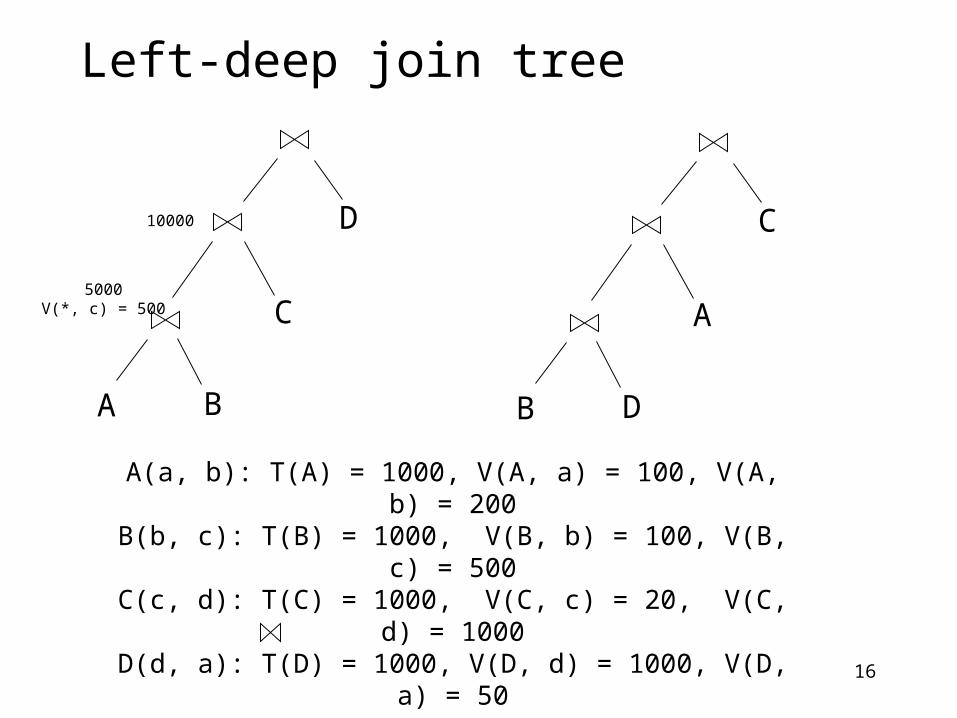
A(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)} 5000
V(*, c) = 500
10000
Left-deep join tree
17
A B
C
D
B D
A
C
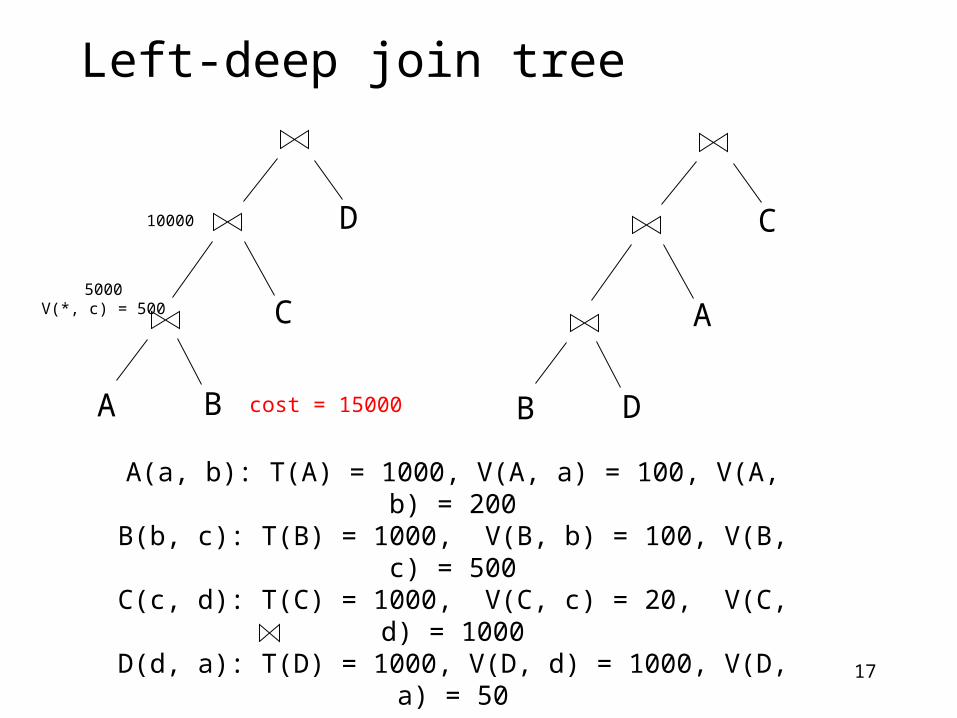
A(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)} 5000
V(*, c) = 500
10000
cost = 15000
Left-deep join tree
18
A B
C
D
B D
A
C
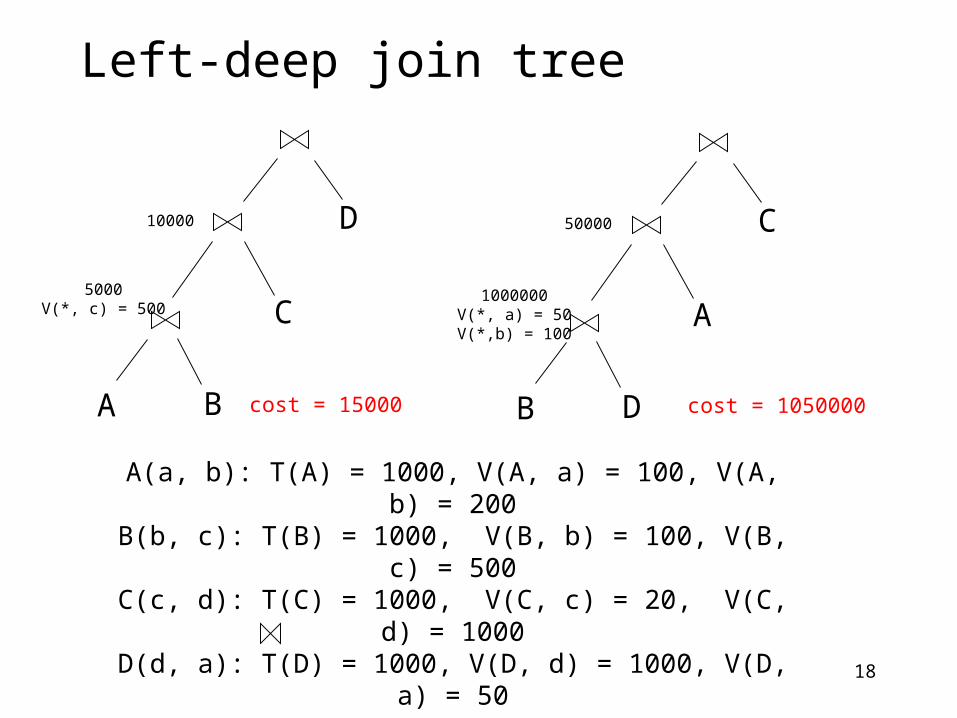
A(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)} 5000
V(*, c) = 500
10000
1000000V(*, a) = 50V(*,b) = 100
50000
cost = 15000 cost = 1050000
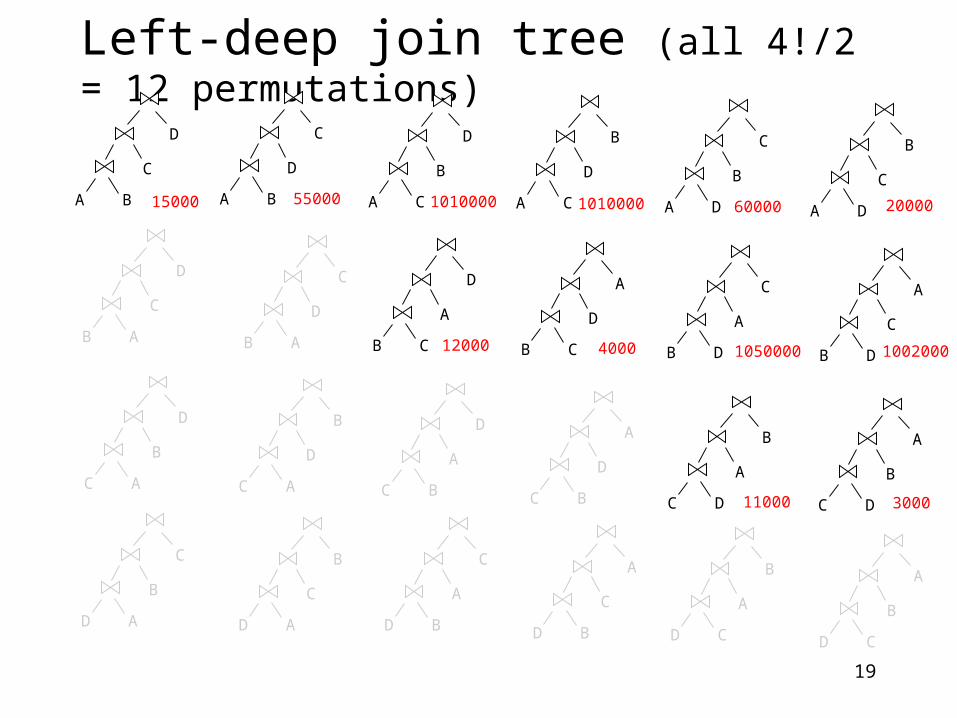
Left-deep join tree (all 4!/2 = 12 permutations)
19
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B
60000
1050000
55000 1010000 101000015000 20000
100200012000 4000
11000 3000
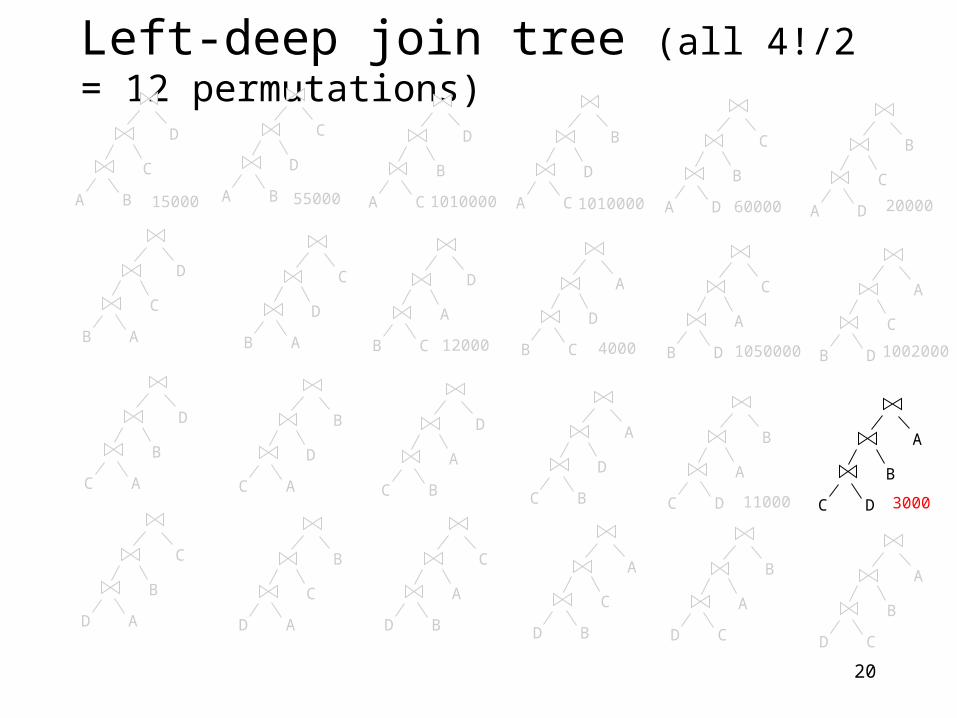
Left-deep join tree (all 4!/2 = 12 permutations)
20
A B
C
D
B A
C
D
A B
D
C
B A
D
C
C A
B
D
C A
D
B
B C
A
D
C B
A
D
D A
B
C
D A
C
B
D B
A
C
D B
C
A
D C
A
B
D C
B
A
C B
D
A
C D
A
B
C D
B
A
B C
D
A
B D
A
C
B D
C
A
A C
B
D
A C
D
B
A D
B
C
A D
C
B
60000
1050000
55000 1010000 101000015000 20000
100200012000 4000
11000 3000
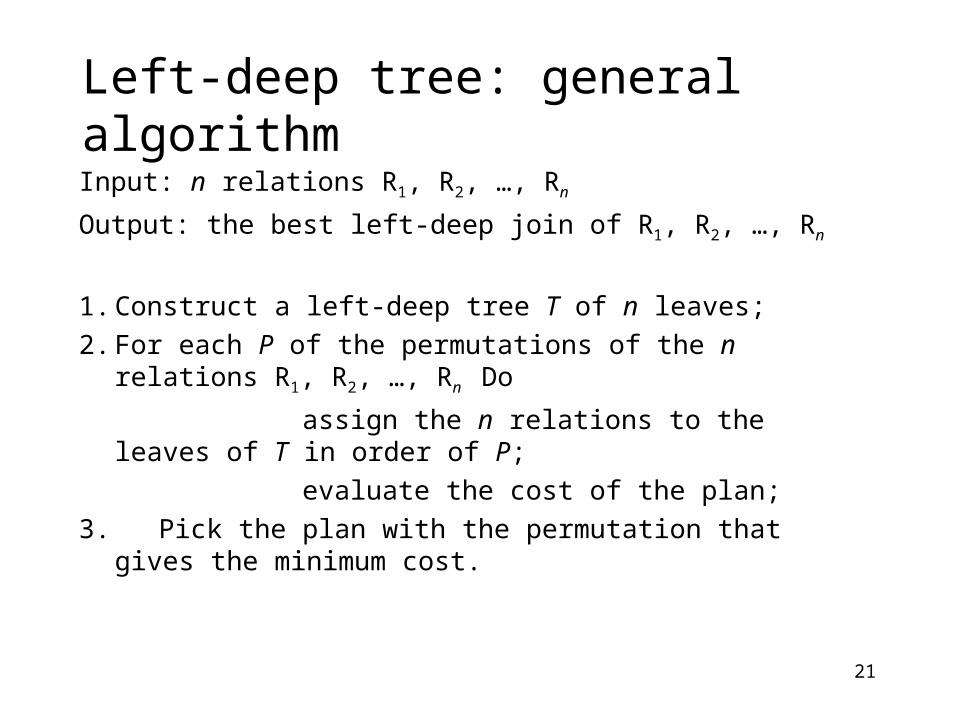
Left-deep tree: general algorithm
Input: n relations R1, R2, …, Rn
Output: the best left-deep join of R1, R2, …, Rn
1. Construct a left-deep tree T of n leaves;
2. For each P of the permutations of the n relations R1, R2, …, Rn Do
assign the n relations to the leaves of T in order of P;
evaluate the cost of the plan;
3. Pick the plan with the permutation that gives the minimum cost.
21

Dynamic ProgrammingConsider all tree structures.
22
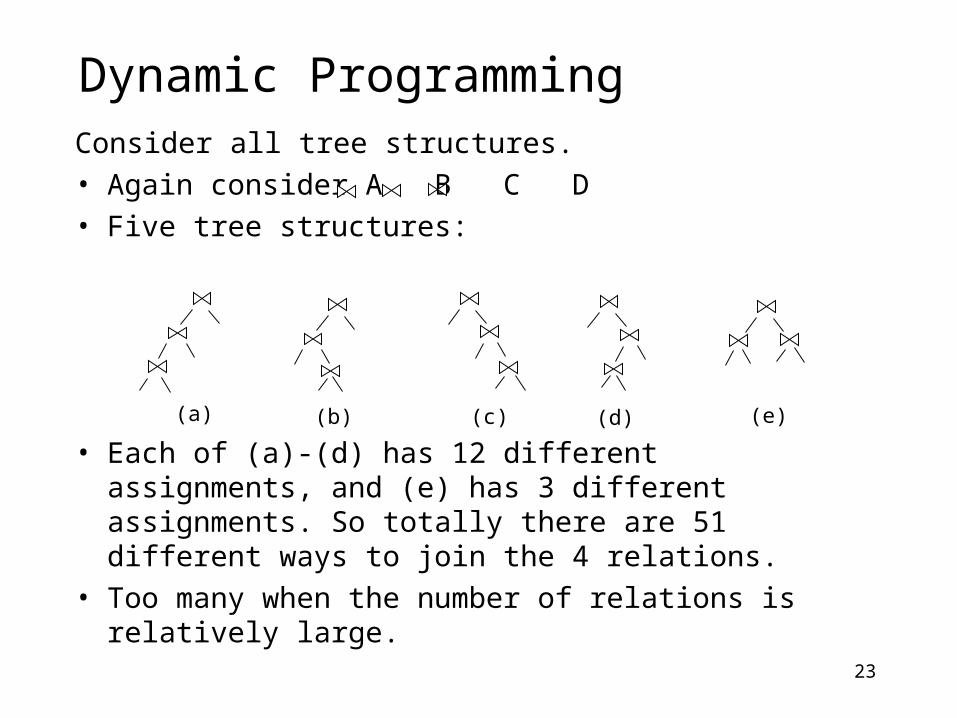
Dynamic ProgrammingConsider all tree structures.
• Again consider A B C D
• Five tree structures:
• Each of (a)-(d) has 12 different assignments, and (e) has 3 different assignments. So totally there are 51 different ways to join the 4 relations.
• Too many when the number of relations is relatively large.
23
(a) (e)(d)(c)(b)
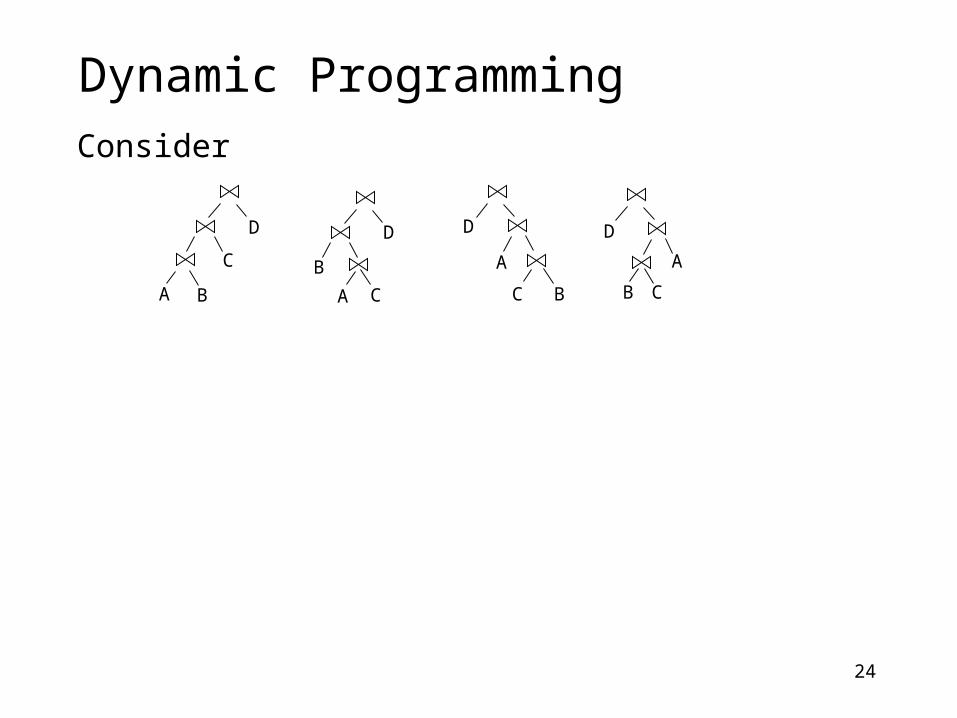
Dynamic ProgrammingConsider
24
D DDD
AA
AA BB
B
B CCC
C

Dynamic ProgrammingConsider
25
D DDD
AA
AA BB
B
B CCC
C
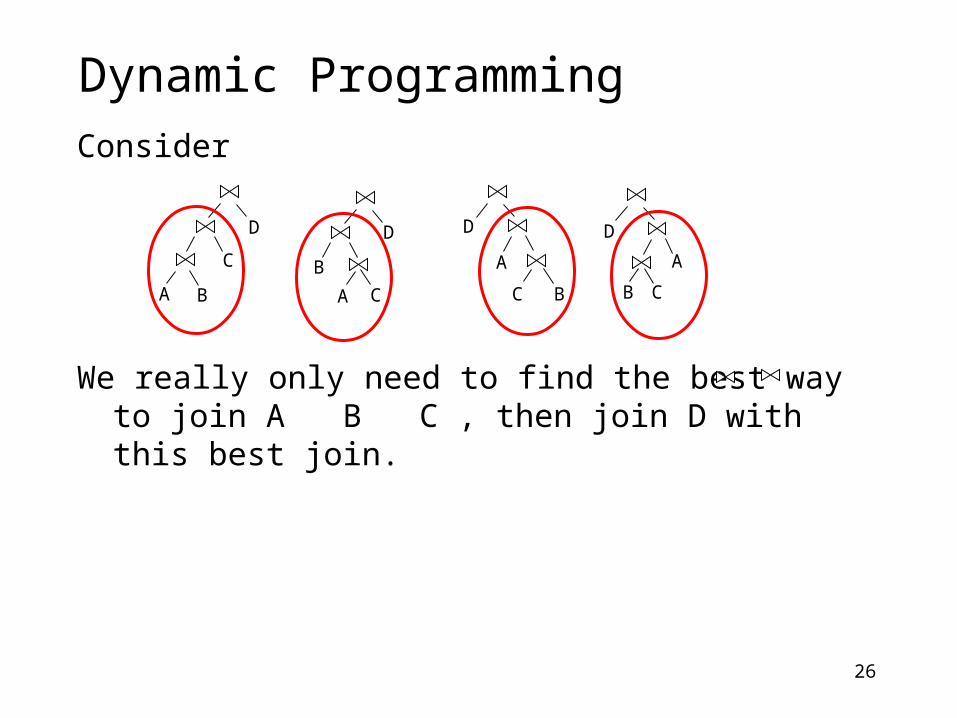
Dynamic ProgrammingConsider
We really only need to find the best way to join A B C , then join D with this best join.
26
D DDD
AA
AA BB
B
B CCC
C
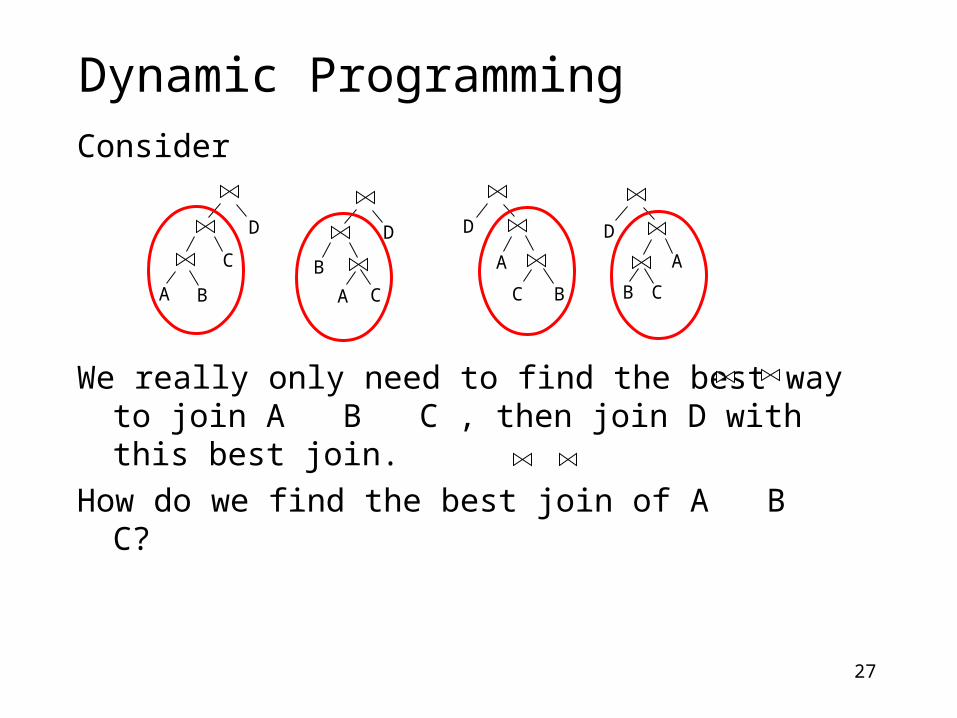
Dynamic ProgrammingConsider
We really only need to find the best way to join A B C , then join D with this best join.
How do we find the best join of A B C?
27
D DDD
AA
AA BB
B
B CCC
C

Dynamic ProgrammingConsider
We really only need to find the best way to join A B C , then join D with this best join.
How do we find the best join of A B C?
We consider all possible ways:
(A B) C, (A C) B, (B C) A.
28
D DDD
AA
AA BB
B
B CCC
C
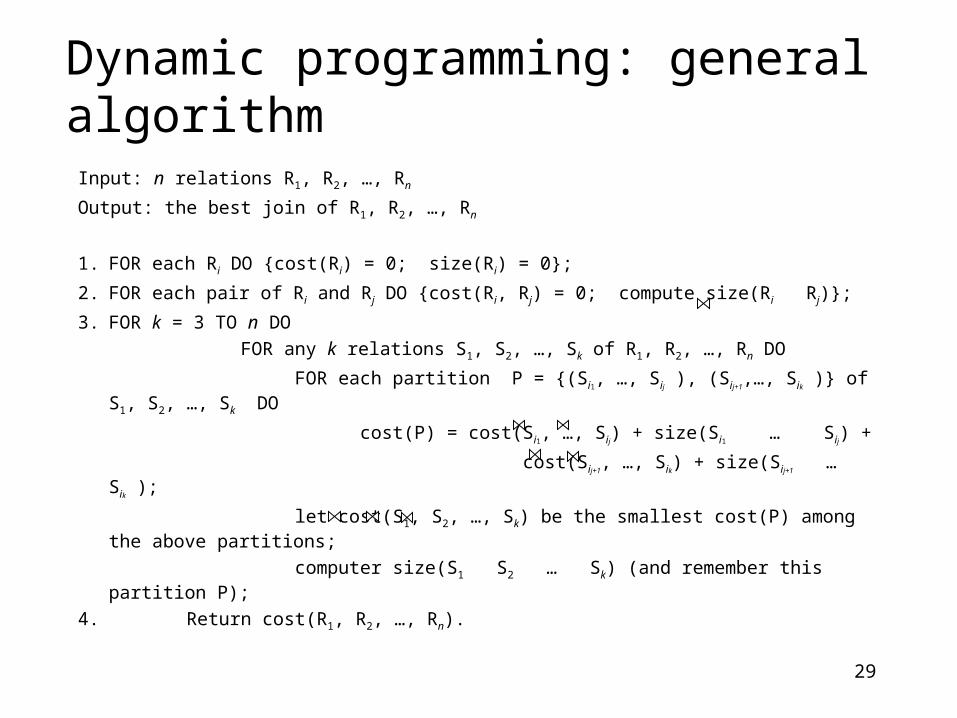
Dynamic programming: general algorithm
Input: n relations R1, R2, …, Rn
Output: the best join of R1, R2, …, Rn
1. FOR each Ri DO {cost(Ri) = 0; size(Ri) = 0};
2. FOR each pair of Ri and Rj DO {cost(Ri, Rj) = 0; compute size(Ri Rj)};
3. FOR k = 3 TO n DO
FOR any k relations S1, S2, …, Sk of R1, R2, …, Rn DO
FOR each partition P = {(Si1, …, Sij ), (Sij+1,…, Sik )} of S1, S2, …, Sk DO
cost(P) = cost(Si1, …, Sij) + size(Si1 … Sij) +
cost(Sij+1, …, Sik) + size(Sij+1
… Sik );
let cost(S1, S2, …, Sk) be the smallest cost(P) among the above partitions;
computer size(S1 S2 … Sk) (and remember this partition P);
4. Return cost(R1, R2, …, Rn).
29
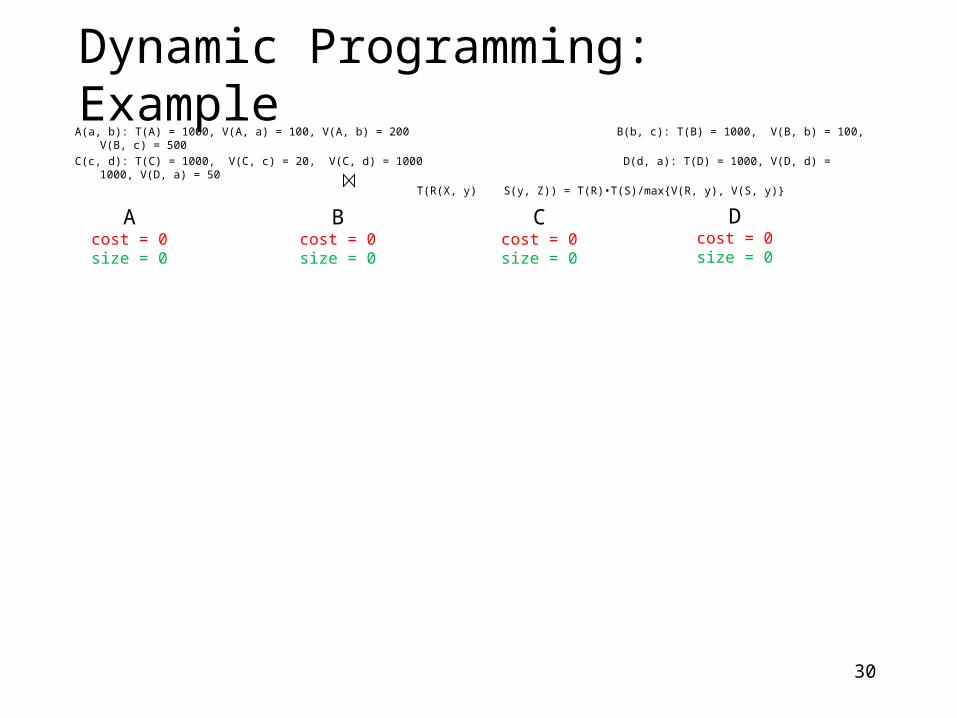
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
30
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
31
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
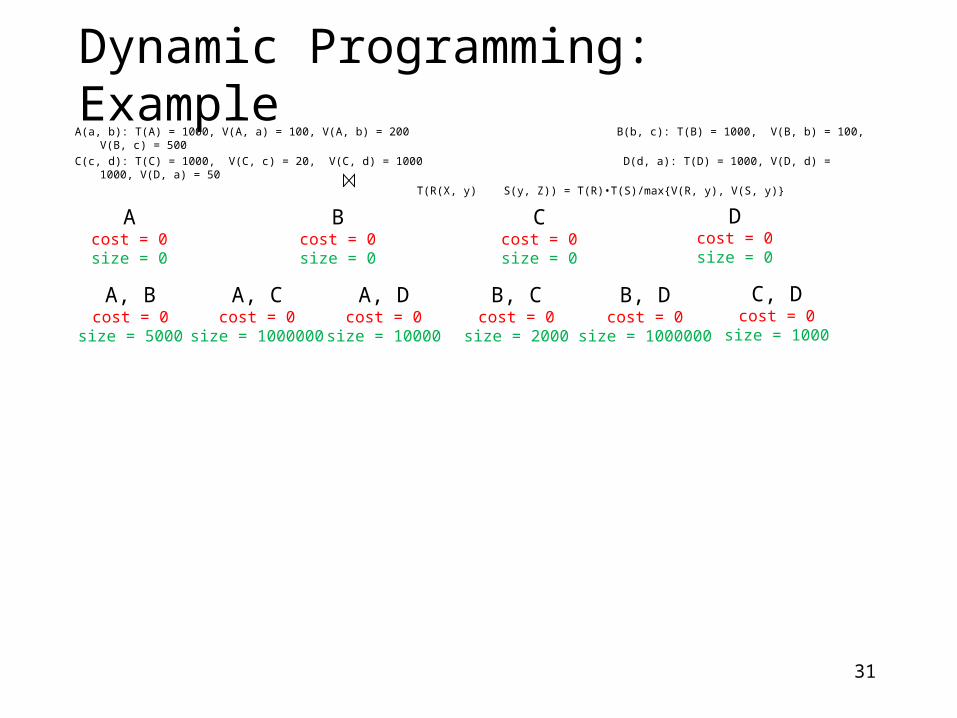
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
32
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
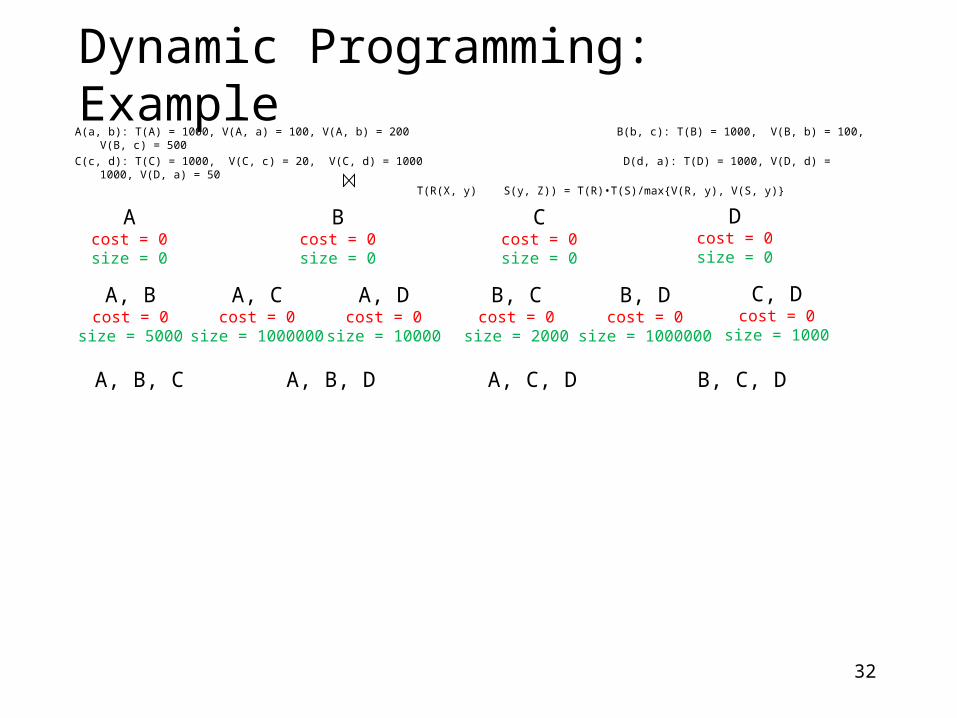
A, B, C B, C, DA, C, DA, B, D

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
33
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
34
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
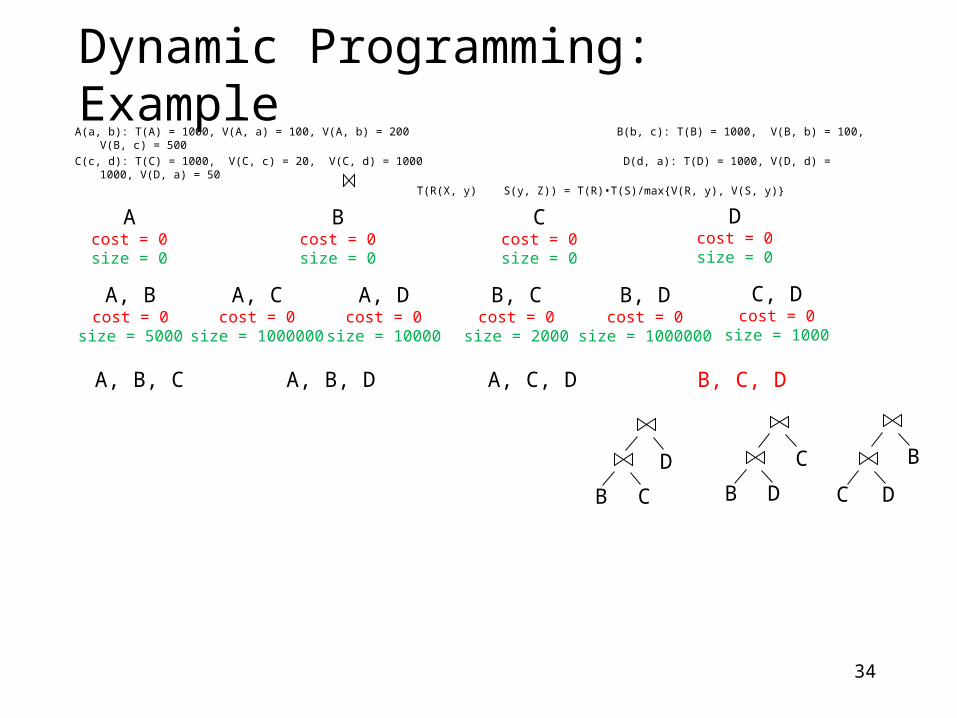
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
35
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D
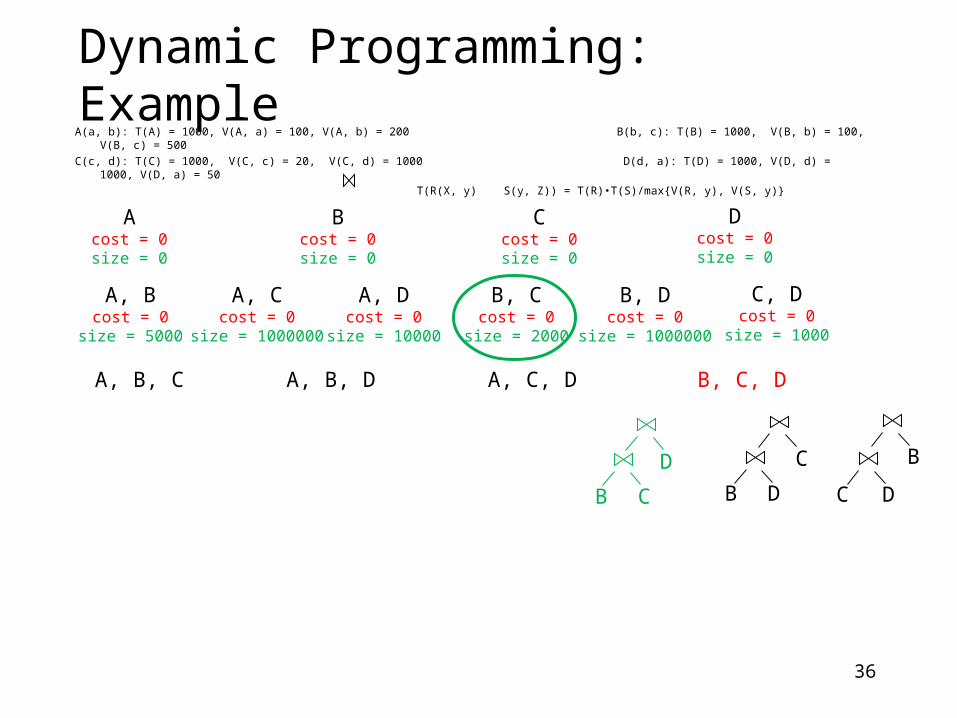
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
36
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D
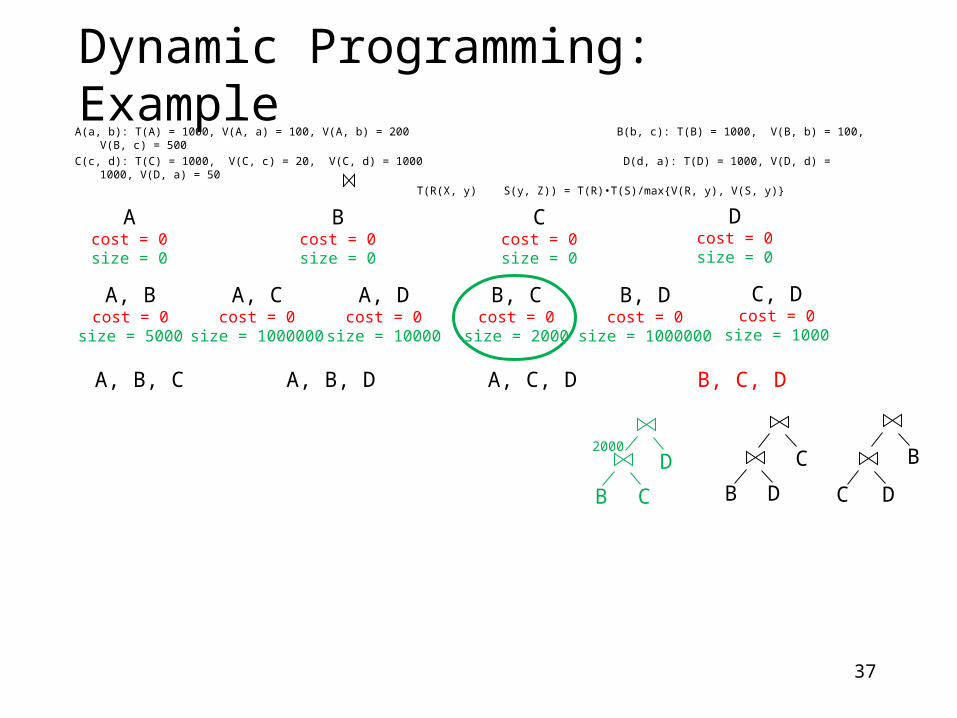
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
37
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D
2000

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
38
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D
2000
2000

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
39
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D
2000 10001000000
10000002000 1000

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
40
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, DA, C, DA, B, D
CB B
D B
C
C
D D
2000 10001000000
10000002000 1000

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
41
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, C B, C, Dcost = 1000size = 2000
A, C, DA, B, D
BC D
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
BC D
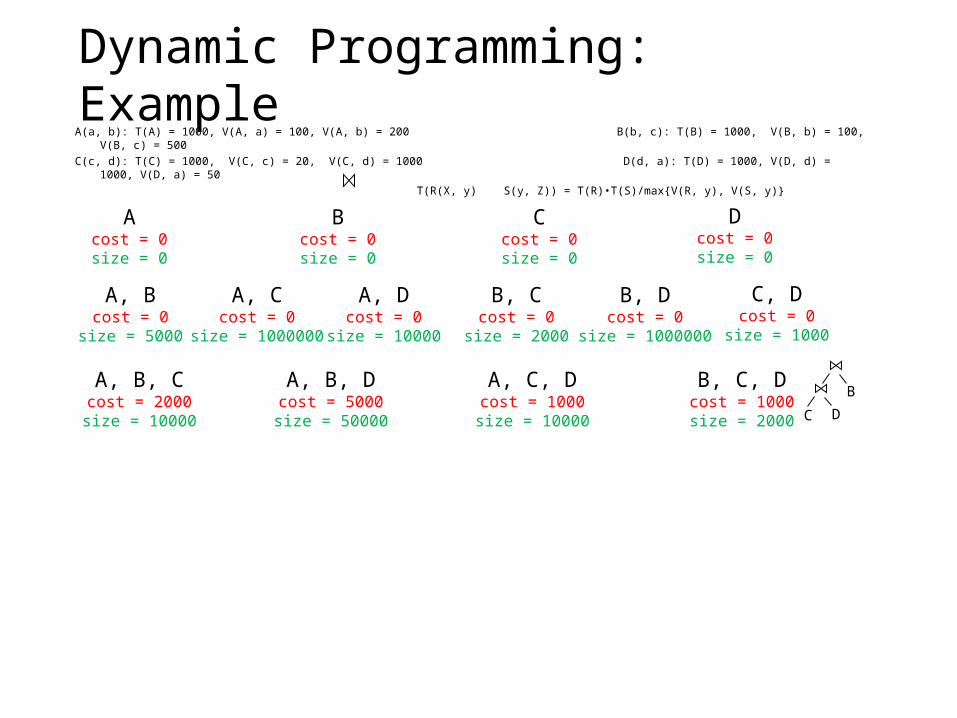
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
43
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
BC D
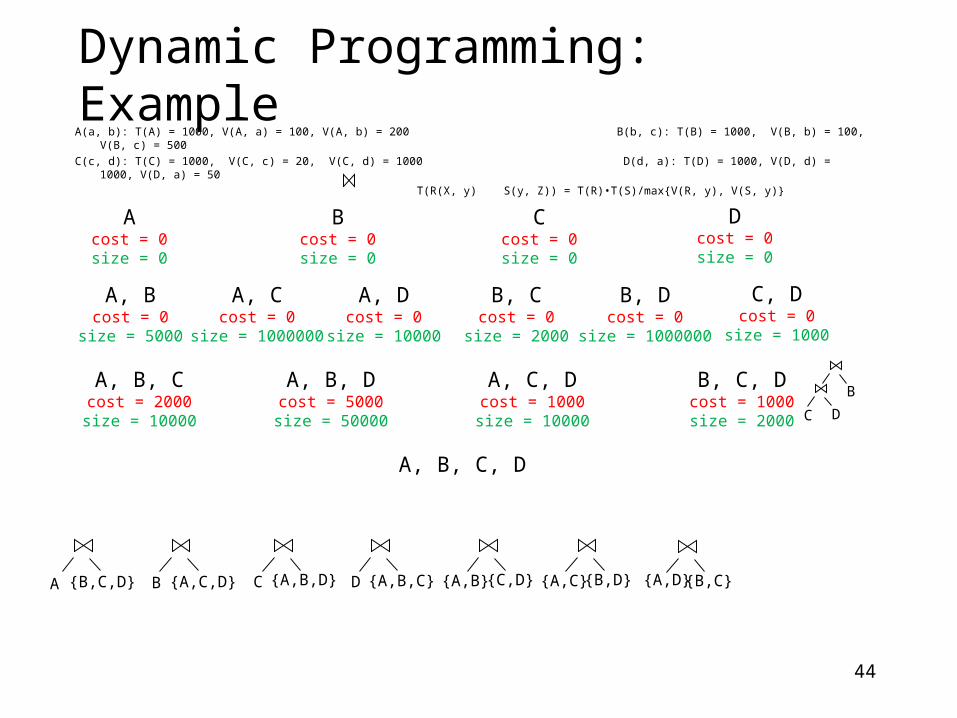
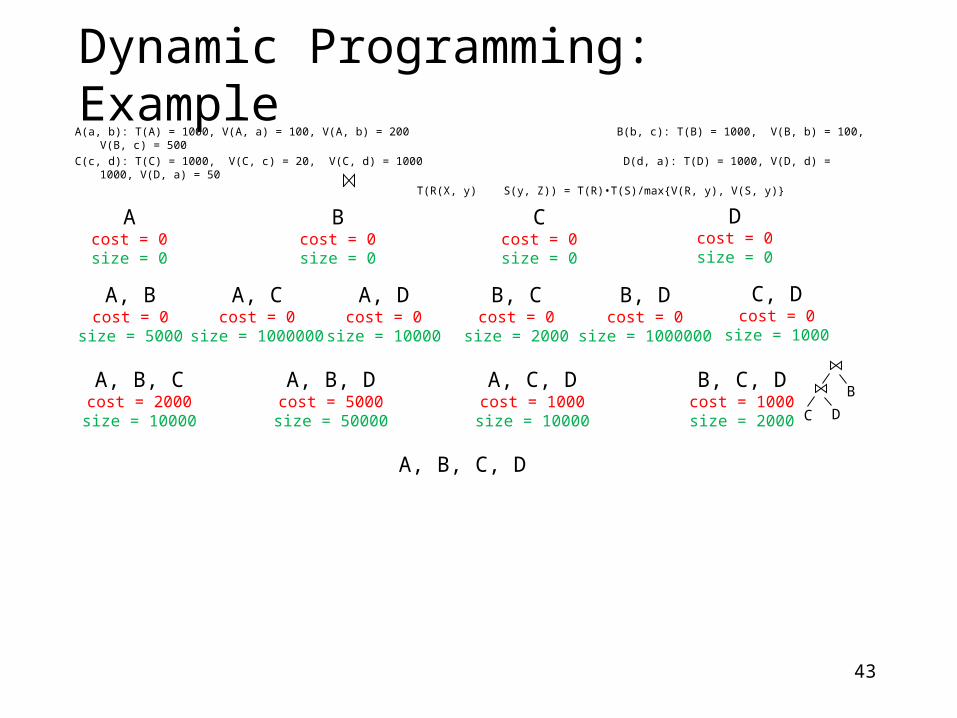
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
44
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
BC D

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
45
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000
BC D

Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
46
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 6000
BC D
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
47
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 11000 55000 12000 6000 2000000 12000
BC D
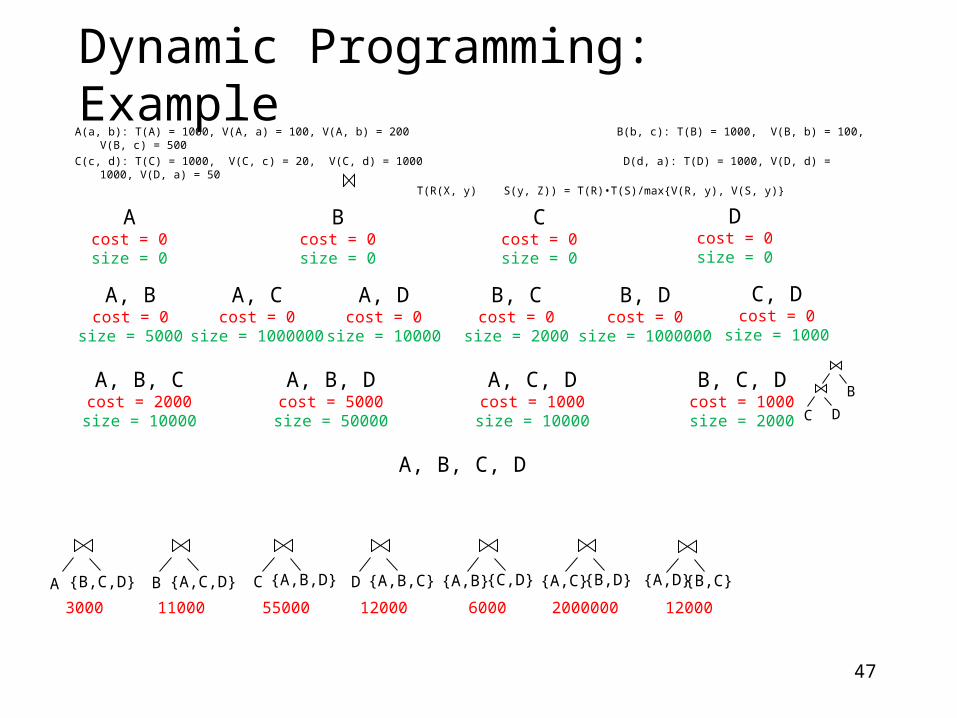
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
48
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 11000 55000 12000 6000 2000000 12000
BC D
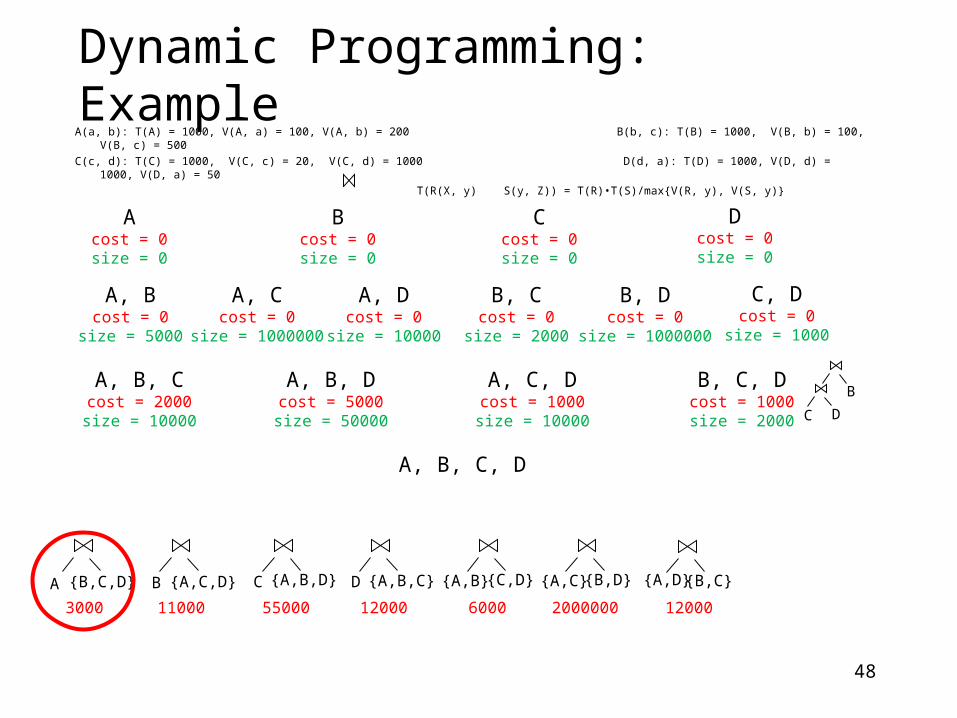
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
49
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 11000 55000 12000 6000 2000000 12000
A
BC D
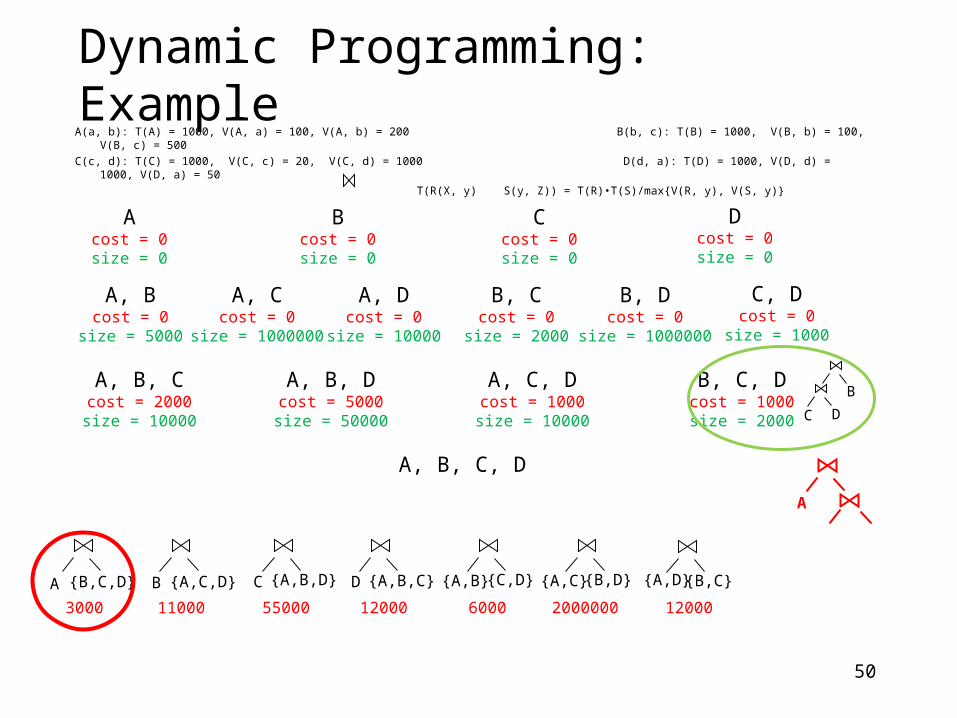
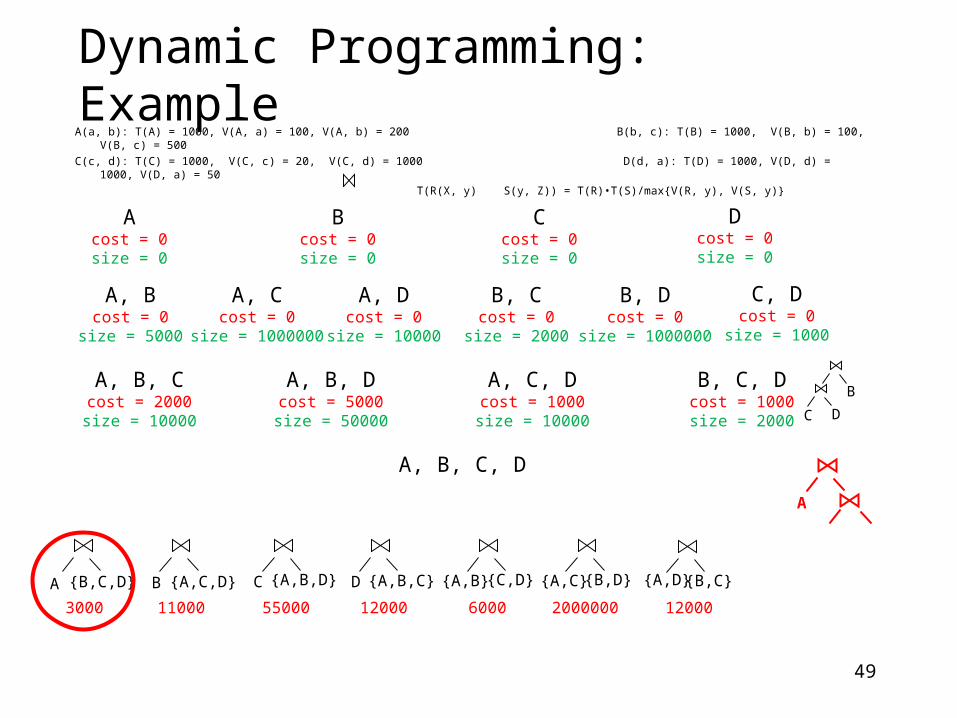
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
50
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 11000 55000 12000 6000 2000000 12000
A
BC D
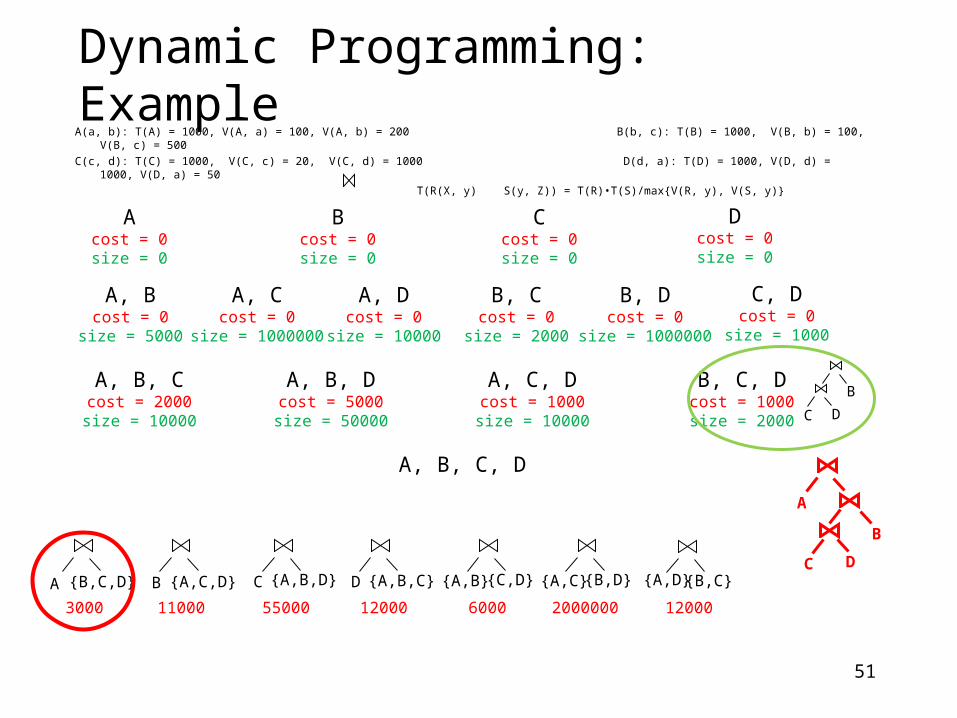
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
51
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, D
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 11000 55000 12000 6000 2000000 12000
A
B
C D
BC D
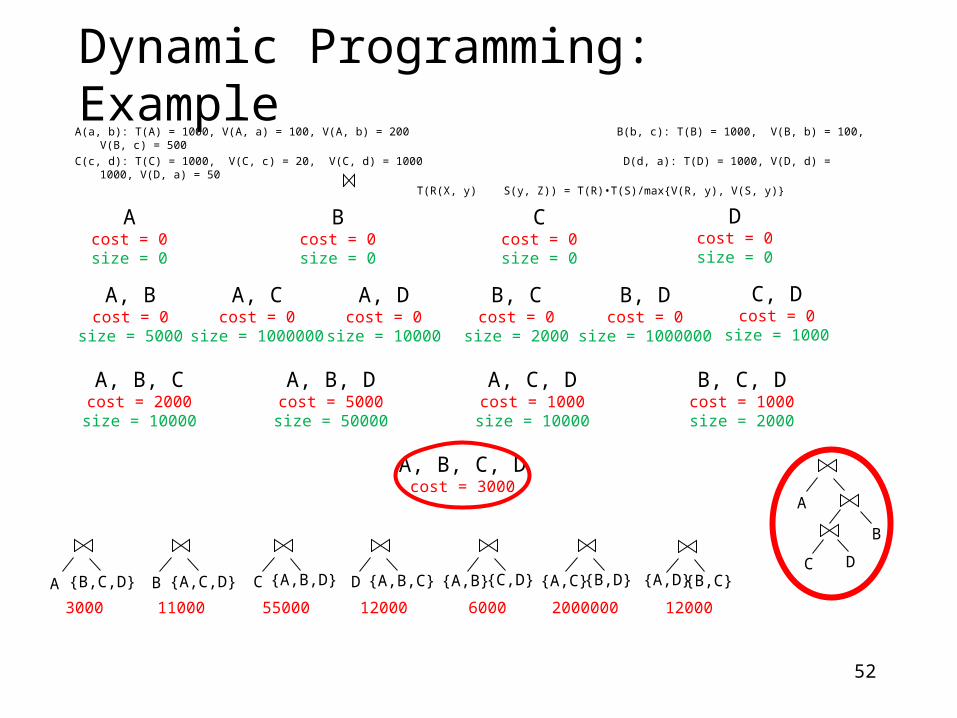
Dynamic Programming: ExampleA(a, b): T(A) = 1000, V(A, a) = 100, V(A, b) = 200 B(b, c): T(B) = 1000, V(B, b) = 100, V(B, c) = 500
C(c, d): T(C) = 1000, V(C, c) = 20, V(C, d) = 1000 D(d, a): T(D) = 1000, V(D, d) = 1000, V(D, a) = 50
T(R(X, y) S(y, Z)) = T(R)•T(S)/max{V(R, y), V(S, y)}
52
Acost = 0size = 0
Dcost = 0size = 0
Ccost = 0size = 0
Bcost = 0size = 0
A, Bcost = 0
size = 5000
C, Dcost = 0
size = 1000
B, Dcost = 0
size = 1000000
B, Ccost = 0
size = 2000
A, Dcost = 0
size = 10000
A, Ccost = 0
size = 1000000
A, B, Ccost = 2000size = 10000
B, C, Dcost = 1000size = 2000
A, C, Dcost = 1000size = 10000
A, B, Dcost = 5000size = 50000
A, B, C, Dcost = 3000
A
{B,C,D} DCB {A,C,D} {A,B,D} {A,B,C}
{A,B} {C,D} {A,C} {B,D} {A,D}{B,C}
3000 11000 55000 12000 6000 2000000 12000
A
B
C D
LQP Optimization with Size: Summary• Estimating sizes of immediate relations• Consider different order of an operation
left-deep tree
dynamic programming
53
Construction of Physical Query Plan
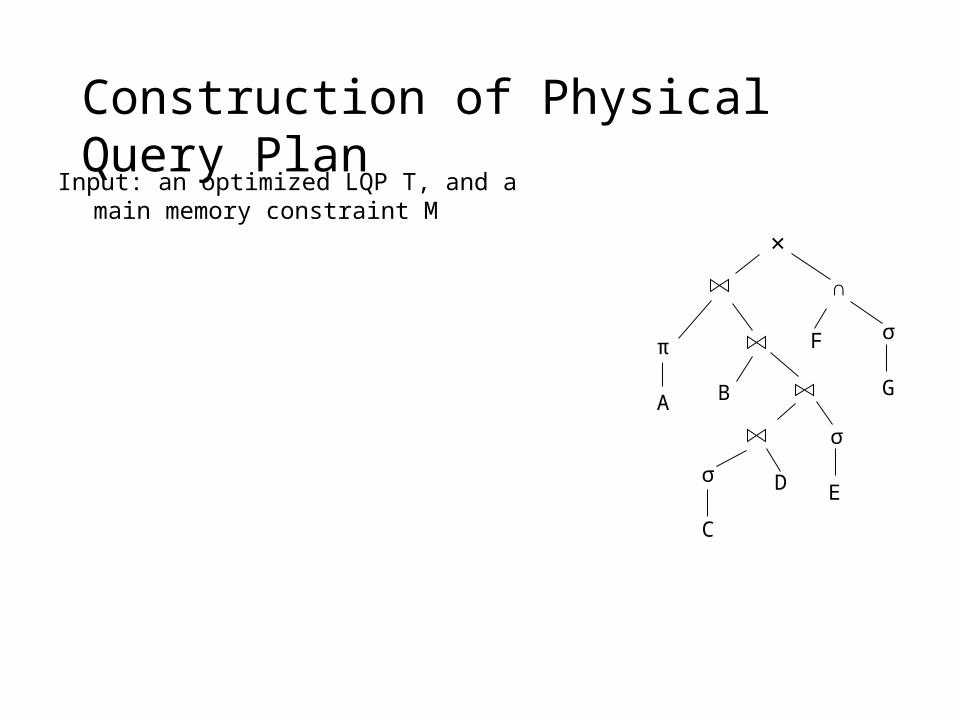
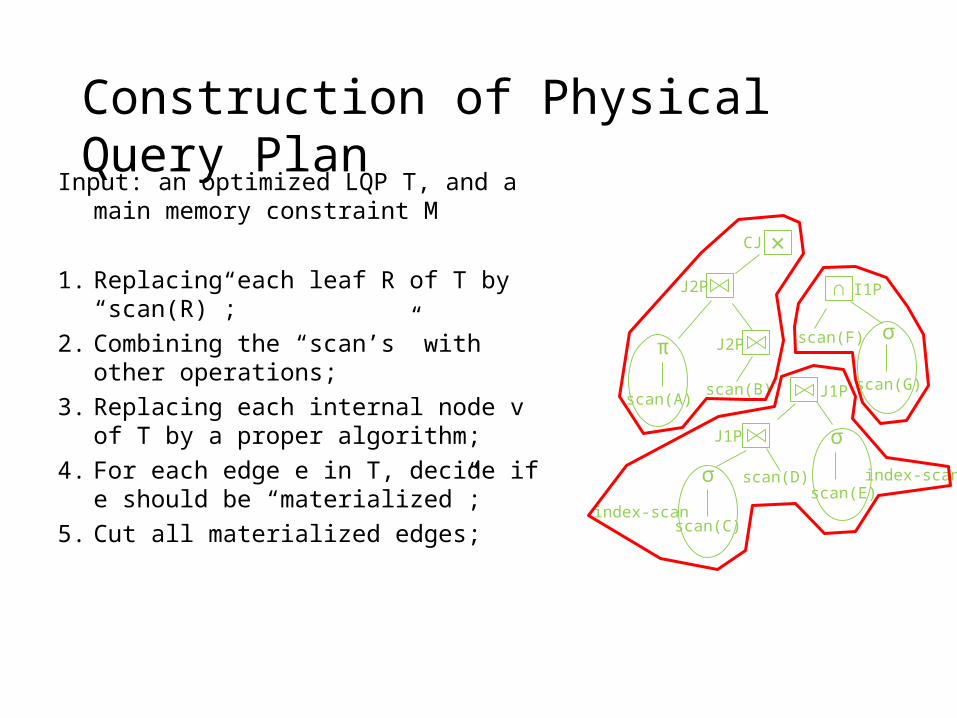
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
×
∩
π
σ
σ
σ
G
F
ED
C
BA

Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)

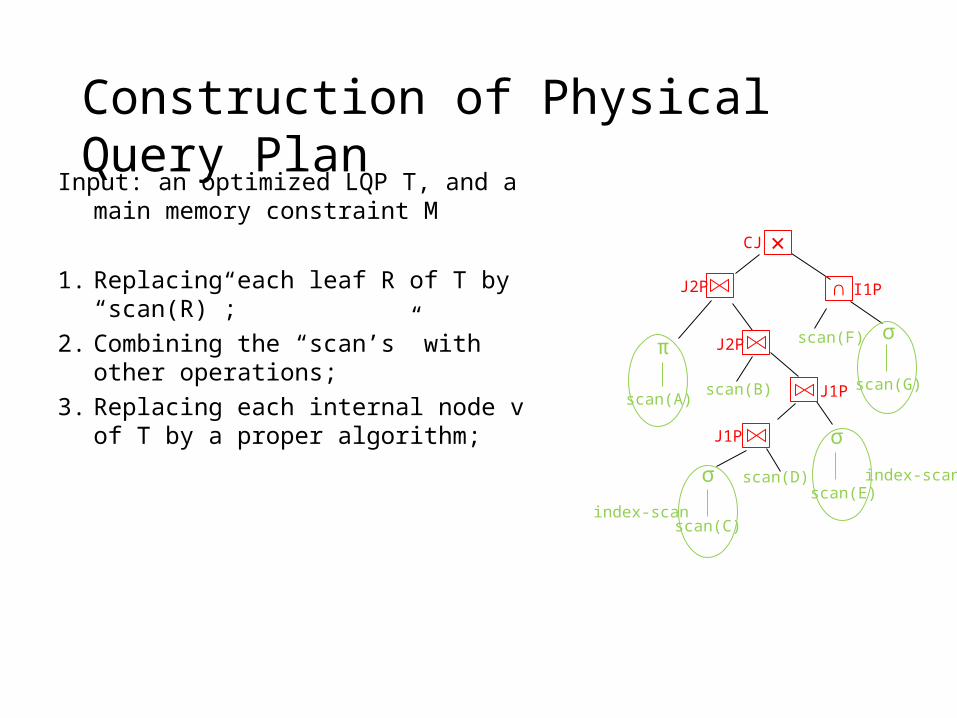
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
3. Replacing each internal node v of T by a proper algorithm;
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
J2P
J2P
J1P
J1P
CJ
I1P

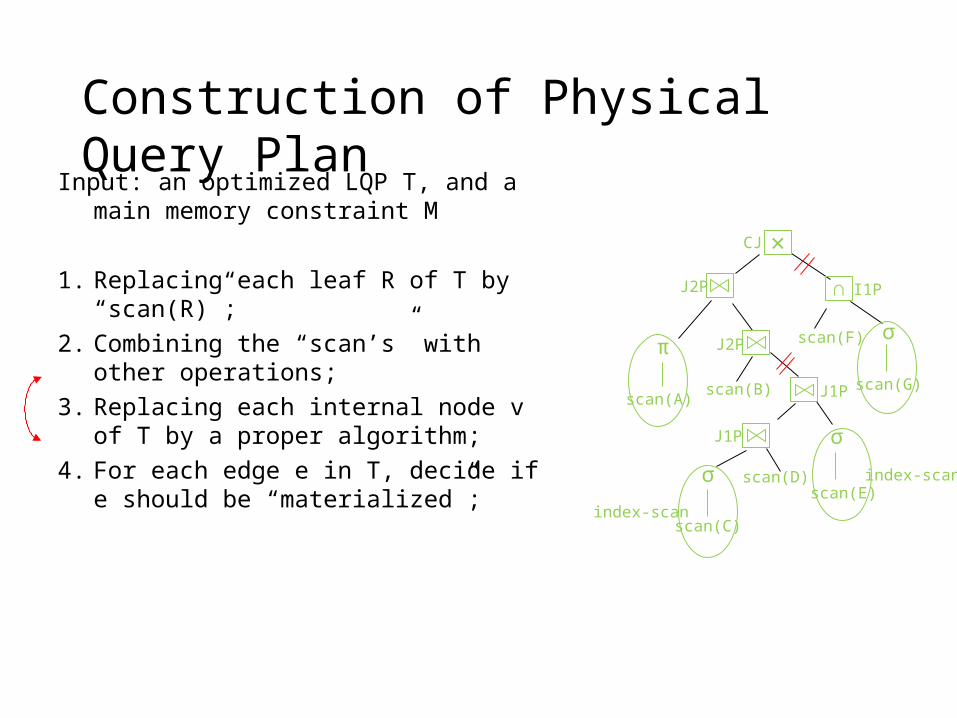
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
3. Replacing each internal node v of T by a proper algorithm;
4. For each edge e in T, decide if e should be “materialized”;
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
J2P
J2P
J1P
J1P
CJ
I1P
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
3. Replacing each internal node v of T by a proper algorithm;
4. For each edge e in T, decide if e should be “materialized”;
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
J2P
J2P
J1P
J1P
CJ
I1P
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
3. Replacing each internal node v of T by a proper algorithm;
4. For each edge e in T, decide if e should be “materialized”;
5. Cut all materialized edges;
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
J2P
J2P
J1P
J1P
CJ
I1P
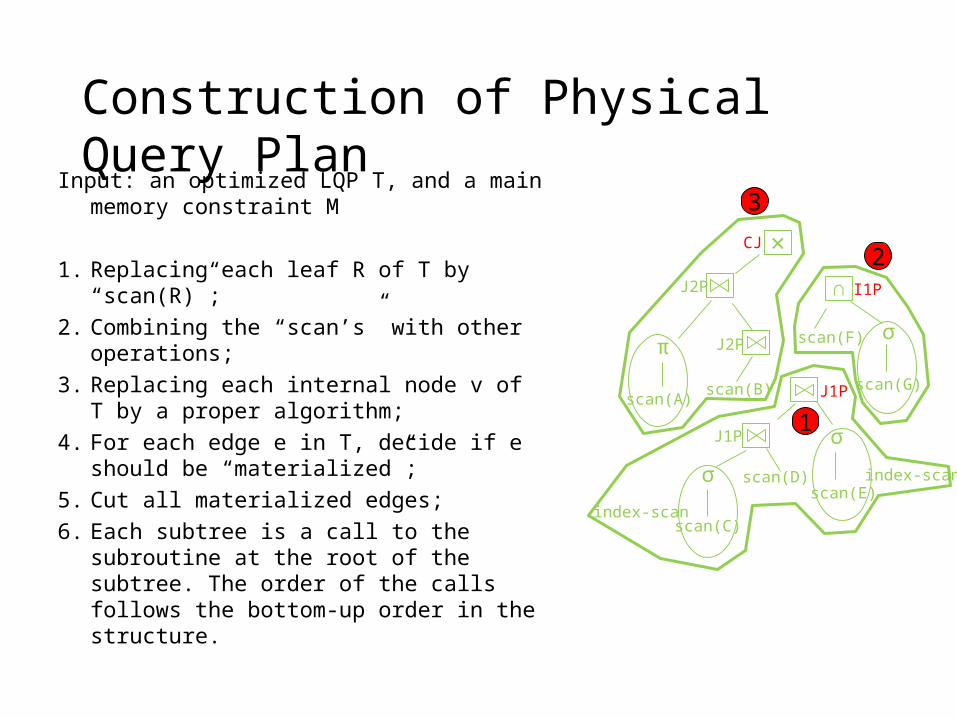
Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
3. Replacing each internal node v of T by a proper algorithm;
4. For each edge e in T, decide if e should be “materialized”;
5. Cut all materialized edges;
6. Each subtree is a call to the subroutine at the root of the subtree. The order of the calls follows the bottom-up order in the structure.
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
J2P
J2P
J1P
J1P
CJ
I1P
1
2
3

Construction of Physical Query PlanInput: an optimized LQP T, and a main memory
constraint M
1. Replacing each leaf R of T by “scan(R)”;
2. Combining the “scan’s” with other operations;
3. Replacing each internal node v of T by a proper algorithm;
4. For each edge e in T, decide if e should be “materialized”;
5. Cut all materialized edges;
6. Each subtree is a call to the subroutine at the root of the subtree. The order of the calls follows the bottom-up order in the structure.
×
∩
π
σ
σ
σ
scan(G)
scan(F)
scan(E)scan(D)
scan(C)
scan(B)scan(A)
index-scan
index-scan
J2P
J2P
J1P
J1P
CJ
I1P
1
2
3
This produces an executable code for the input DB program
Physical Query Plan: Summary
• Replacing internal nodes of a LQP by proper algorithms;
• Deciding if a subroutine call should be pipelined or materialized;
• Many optimization techniques are involved here;
• In practice, heuristic optimization techniques are used to construct good physical query plans;
• The resulting physical query plan is an executable code.
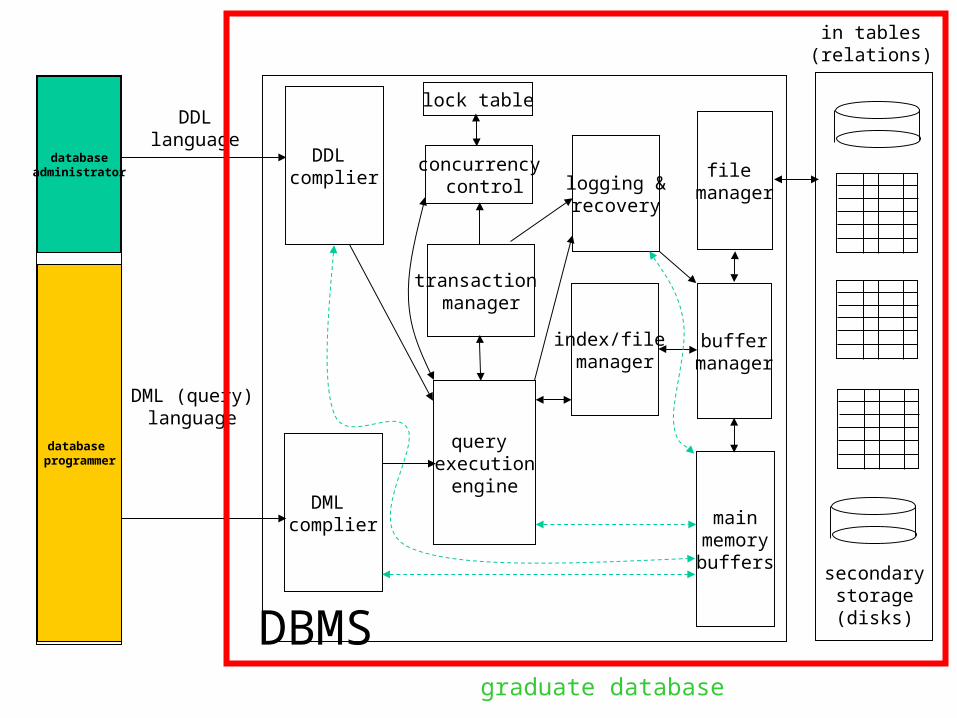
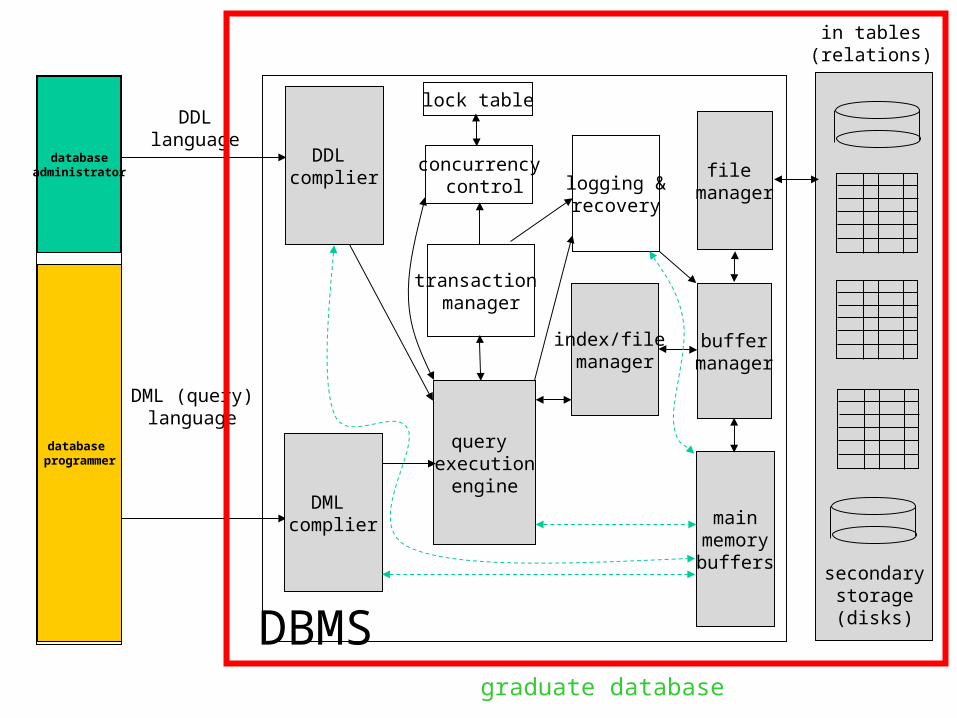
secondarystorage(disks)
in tables(relations)
databaseadministrator
DDLlanguage
database programmer
DML (query)language
DBMS
file manager
buffermanager
mainmemorybuffers
index/file manager
DML complier
DDL complier
query execution
engine
transaction manager
concurrency control
lock table
logging &recovery
graduate database
secondarystorage(disks)
in tables(relations)
databaseadministrator
DDLlanguage
database programmer
DML (query)language
DBMS
file manager
buffermanager
mainmemorybuffers
index/file manager
DML complier
DDL complier
query execution
engine
transaction manager
concurrency control
lock table
logging &recovery
graduate database