
Course Review for Final ECE460 Spring, 2012. Common Fourier Transform Pairs 2.
33
Course Review for Final ECE460 Spring, 2012
-
Upload
mavis-annis-riley -
Category
Documents
-
view
220 -
download
0
Transcript of Course Review for Final ECE460 Spring, 2012. Common Fourier Transform Pairs 2.

Course Review for Final
ECE460Spring, 2012

2
Common Fourier Transform Pairs
Time Frequency 1 t 1
2 1 f
3 0t t 02j f te
4 02j f te 0f f
5
cos 2 of t 0 0
1
2f f f f
6 0sin 2 f t 0 02
jf f f f
7 t sinc f
8 t 2sinc f
9 2sinc t f
10 , 0te u t 1
2j f
11 , 0tt e u t 2
1
2j f
12 , 0te 22
2
2 f
13 2te 2fe
14 sgn t 1
j f
15 u t 1 1
2 2f
j f
16 ( )n t 2n
j f
17 1
t sgnj f
18 0j n tn
n
X e
02 n
n
X n
19 0n
t nT
0 0
1
n
nf
T T
( ) ( ) 2j f tx t X f e dfp¥
- ¥ò@ ( ) 2( ) j f tX f x t e dtp
¥-
- ¥ò@

3
Fourier Transform Properties
Property Time Frequency Linearity 1 1 2 2( ) ( )x t x t 1 1 2 2( ) ( )X f X f
Time Shift 0x t t 02j f te X f
Duality X t x f
Time Scaling x at 1 f
Xa a
Convolution x t y t X f Y f
Multiplication ( ) ( )x t y t ( ) ( )X f Y f
Parseval’s Theorem
*( )x t y t dt
*( )X f Y f df
Differentiation n
n
dx t
dt 2
nj f X f
Integration t
x d
( ) 1(0) ( )
2 2
X fX t
j f
Rayleigh’s 2x d
2
X f df
Autocorrelation *( )xR t x t x t d
2[ ( )]xR t X fF
Moments nt x d
02
n n
n f
j dX f
df
Modulation 0( ) cos(2 )x t f t 0 0
1 1( ) ( )
2 2X f f X f f
( ) ( ) 2j f tx t X f e dfp¥
- ¥ò@ ( ) 2( ) j f tX f x t e dtp
¥-
- ¥ò@

4
Sampling TheoremAble to reconstruct any bandlimited signal from its samples if we sample fast enough.
If X(f) is band limited with bandwidth W
then it is possible to reconstruct x(t) from samples i.e., 0 for X f f W
s nx nT
1if
2sTW

5
Bandpass Signals & SystemsFrequency Domain:
Low-pass Equivalents:
Let
Giving
To solve, work with low-pass parameters (easier mathematically), then switch back to bandpass via
Y f X f H f
0 0 02lY f u f f X f f H f f
0 0
0 0
2
2
l
l
X f u f f X f f
H f u f f H f f
1
21
2
l l l
l l l
Y f X f H f
y t x t h t
2Re oj f tly t y t e

6
Analog ModulationAmplitude Modulation (AM)
Message Signal:Sinusoidal Carrier:
• AM (DSB)
• DSB – SC
• SSB• Started with DSB-SC signal and filtered to one sideband• Used ideal filter:
•
( )m t
( ) cos(2 )c cc t A f t
( ) 1 ( ) cos(2 )
( ) ( ) ( ) ( ) ( )2 2
c a c
c a cc c c c
s t A k m t f t
A k AS f f f f f M f f M f f
( ) cos(2 ) ( )
( ) ( ) ( )2
c c
c c
s t A f t m t
AcS f M f f M f f
1,( )
0, otherwisecf f
H f
ˆcos 2 sin 2
where
1ˆ
c c c cs t A m t f t A m t f t
m t m tt

7
Angular ModulationAngle Modulation
Definitions:
FM (sinusoidal signal)
2
2
cos 2 cos 2 2
t
p f
p f
t
c c p c c f
PM FM
t k m t k m d
d dt k m t k m t
dt dt
s t A f t k m t A f t k m d
Deviation constants ,
Modulation Index ( ) max
max max
Bandwidth 2 1
f p
p p
f f fm
c c
k k
k m t
m t m tk k
f W
B B W
( ) cos 2 sin 2
Re cos 2
2
c c m
c n c mn
cn c m c m
n
s t A f t f t
A J f n f t
AS f J f f n f f f n f

8
Combinatorics1. Sampling with replacement and ordering
2. Sampling without replacement and with ordering
3. Sampling without replacement and without ordering
4. Sampling with replacement and without ordering
Bernoulli Trials
Conditional Probabilities
where = population size and = subpopulation sizern n r
!
!
n
n r
!
! !
n n
r n r r
1n r
r
probability of success and 1 probability of failure
A event of k-success in n-trialsk
p p
1
; , Binomial Law
n kkk
nP A p p
k
b k n p
1 2
21 2 2
, 0( | )
0, Otherwise
P E EP E
P E E P E

9
Random Variables• Cumulative Distribution Function (CDF)
• Probability Distribution Function (PDF)
• Probability Mass Function (PMF)
• Key Distributions• Bernoulli Random Variable
• Uniform Random Variable
• Gaussian (Normal) Random Variable
XF x P X x
X X
df x F x
dx
i ip P X x
1
where = center line and width
X
xf x
1 , 0
, 1
0, otherwise
p x
P X x p x
2
2 221 or : ,
2
1
xx m
X x
xX X
X
f x e X N m
x mF x
Q x x

10
Functions of a Random VariableGeneral:
Statistical Averages• Mean
• Variance
:
where number of g x equal to y
Y
X iY i
i i
Y g X
F y P g X y
f xf y i
g x
x Xm E X x f x dx
22x xE X m

11
Multiple Random VariablesJoint CDF of X and Y
Joint PDF of X and Y
Conditional PDF of X
Expected Values
Correlation of X and Y
Covariance of X and Y - what is ρX,Y?
Independence of X and Y
, , ,X YF x y P X x Y y
2
, , ,X Y XYf x y F x yx y
,, , ,X YE g X Y g x y f x y dx dy
,( , ) ( ( , )) ,XY X YR x y E g X Y x y f x y dx dy
,COV( , ) ( )( ) ,x y X YX Y x m y m f x y dx dy
,
|
,, 0
|
0, otherwise
X YX
Y X X
f x yf x
f y x f x
, ,X Y X Yf x y f x f y

Jointly Gaussian R.V.’sX and Y are jointly Gaussian if
Matrix Form:
Function:
12
, 221 2
2 2
1 2 1 22 21 2 1 2
1 1, exp
2 12 1
2
X Yf x y
x m y m x m y m
1 1 2 1
2 1 2 2
1
Var Cov , Cov ,
Cov , Var Cov ,
Cov , Var
covariance matrix of .
T
n
n
n n
E
X X X X X
X X X X X
X X X
C X m X m
X
1[ ]
mean vector of .
[ ]n
E X
E
E X
m X X
11
22
1 1exp
22
T
nf
X x x m C x mC
Y AX b
Y XE E m Y A X b Am b
T
Y Y Y
T TX X
TX
E
E
C Y m Y m
A X m X m A
AC A

13
Random ProcessesNotation:
Understand integration across time or ensemblesMean
Autocorrelation
Auto-covariance
Power Spectral Density
Stationary Processes• Strict Sense Stationary• Wide-Sense Stationary (WSS)• Cyclostationary
Ergodic
x X tm t E X t f d
1 2
1 2 1 2
1 2 1 2 1 2,
,
,
X
X t X t
R t t E X t X t
x x f x x dx dx
1 2 1 1 2 2,X x xC t t E X t m t X t m t
1 2,X XS f R t tF

14
Transfer Through a Linear System
Mean of Y(t) where X(t) is wss
Cross-correlation function RXY(t1,t2)
Autocorrelation function RY(t1,t2)
Spectral Analysis
h t X t Y t
0Y X Xm t E Y t m h s ds m H
1 2 1 2,XY
X
R t t E X t Y t
R h
1 2 1 2,Y
XY
X
R t t E Y t Y t
R h
R h h
2
X X
XY XY X
Y X
S f R
S f R S f H f
S f S f H f
F
F

15
Energy & Power ProcessesFor a sample function
For Random Variables we have
Then the energy and power content of the random process is
2 ,i ix t dt
E
X
2
2
X
,
X
X
E E
E t dt
E X t dt
R t t dt
E
2 , ix t
2X X t dt
E
2 2
2
1lim ,
T
i iTTP x t dt
T
2
2
21lim
T
TX TX t dt
T P
2
2
2
2
2
2
X
2
2
1lim
1lim
1lim ,
T
T
T
T
T
T
X
T
T
XT
P E
E X t dtT
E X t dtT
R t t dtT
P

16
Zero-Mean White Gaussian NoiseA zero mean white Gaussian noise, W(t), is a random process with
4. For any n and any sequence t1, t2, …, tn the random variables W(t1), W(t2), …, W(tn), are jointly Gaussian with zero mean
and covariances
1. 0
2.2
3. Watt/Hz2
oW
oW
E W t t
NR E W t W t
NS f
, cov
(since zero mean)
2
X i j i j
i j
W j i
oj i
K t t W t W t
E W t W t
R t t
Nt t
0 for 1,2,...,iE W t i n

17
Bandpass ProcessesX(t) is a bandpass process
Filter X(t) using a Hilbert Transform:
and define
If X(t) is a zero-mean stationary bandpass process, then Xc(t) and Xs(t) will be zero-mean jointly stationary processes:
Giving
0
is a deterministic bandpass signal
and is non-zero about
X
X X
R
S f R f
F
1; sgnh t H f j f
t
0 0
0 0
cos 2 sin 2
cos 2 sin 2c
s
X t X t f t X t f t
X t X t f t X t f t
0
,
,
,
c c
s s
c s c s
c s
X X
X X
X X X X
E X t E X t
R t t R
R t t R
R t t R
0 0
0 0
cos 2 sin 2
sin 2 cos 2c s
c s
X X X X
X X X X
R R R f R f
R R f R f

18
Performance on an Analog System in Noise
Metric: SNR
Message Signal Power m(t):
Noise: 0M M MP R S f df
0
2wN
NS f f
Know , , , , ,ws t m t n t n t r t y t

19
SNR for Amplitude Modulated Systems
b
S
N in
S
N out
S
N
DSB-SC2 Mc
n
PA
P21
2b
Mc
n
PA
P21
2M
cn
PA
P
SSB2
b
Mc
n
PA
P2 Mc
n
PA
P2 Mc
n
PA
P
AM 2
211
2n
b
M
cn
a PA
P
2
211
2nM
cn
a PA
P
22 nMc
n
a PA
P

20
Digital Systems• Discrete Memoryless Source (DMS) completely defined by:
• Alphabet:
• Probability Mass Function:
• Self-Information• Log2 -
bits (b)
• Loge -nats
Entropy - measure of the average information content per source symbol and is measured in b/symbol
Discrete System:
Bounded:
– Joint entropy of two discrete random variables (X, Y)
– Conditional entropy of the random variable X given Y
– Relationships
logI p p
1 2{ , , , }Na a aA
( )i ip P X a
1 1
1log log
N N
i i i ii i i
H X E I x p p pp
20 logH X N
1 1
, , log ,n m
i j i ji j
H X Y p x y p x y
1 1
| , log |n m
i j i ji j
H X Y p x y p x y
, |
, |
H X Y H X Y H Y
H X Y H Y X H X

21
Mutual InformationMutual Information denotes the amount of uncertainty of X that has been removed by revealing random variable Y.
If H(X) is the uncertainty of channel input before channel output is observed
and H(X|Y) is the uncertainty of channel input after channel output is
observed,thenI(X;Y) is the uncertainty about the channel input that is resolved by
observing channel output
2,
; |
,, log
,
; min ,
i jx y
I X Y H X H X Y
p x yp x y
p x p y
H X H Y H X Y
I X Y H X H Y

22
Source CodingViable Source Codes
• Uniquely decodable properties• Prefix-free• instantaneously decodable
Theorem: A source with entropy H can be encoded with arbitrarily small error probability at any rate R (bits/source output)as long as R > H.
Conversely if R < H, the error probability will be bounded away from zero, independent of the complexity of the encoder and the decoder employed.
: the average code word length per source symbol
Huffman Coding
where is the length of the code wordx X
R p x l x l x
R
Huffman code: 1H X R H X

23
QuantizationQuantization Function:
Squared-error distortion for a single measurement:
Distortion D for the source since X is a random variable
In general, a distortion measure is a distance between X and its reproduction .
Hamming distortion:
ˆ for all i iQ x x x
2 2ˆ,d x x x Q x x %
2ˆ,D E d X X E X Q X
ˆ1,
ˆ,0, Otherwiseh
x xd x x
X̂

24
Rate DistortionMinimum number of bits/source output required to reproduce a memoryless source with distortion less than or equal to D is call the rate-distortion function, denoted by R(D):
For a binary memoryless sourceAnd with Hamming distortion, the rate-distortion function is
For a zero-mean, Gaussian Source with variance σ2
1 1 0i iP X P X p
0 min{ ,1 }
0, otherwiseb bH p H d D p p
R D
2
21log 0
20, otherwise
DR D D
2 2where log 1 log 1bH p p p p p

25
Geometric RepresentationGram-Schmidt Orthogonalization
1. Begin with first waveform, s1(t) with energy ξ1:
2. Second waveforma. Determine projection, c21, onto ψ1
b. Subtract projection from s2(t)
c. Normalize
3. Repeat
11
1
s tt
21 2 1c s t t dt
2 2 21 1d t s t c t
2 22 2 2
2
where d t
t d t dt
ki k ic s t t dt
1
1
k
k k ki ii
d t s t c t
2where kk k k
k
d tt d t dt

26
Pulse Amplitude ModulationBandpass Signals
What type of Amplitude Modulation signal does this appear to be?
X Baseband Signal
ms t
cos 2 cf t
Bandpass Signal
cos 2m cs t f t
cos 2 1, 2, ... ,
2
m m T c
mm T c T c
u t A g t f t m M
AU f G f f G f f
2
2 2 2
2 22 2
cos 2
cos 42 2
m m
m T c
m mT T c
u t dt
A t g t f t dt
A Ag t dt g t f t dt
0
27
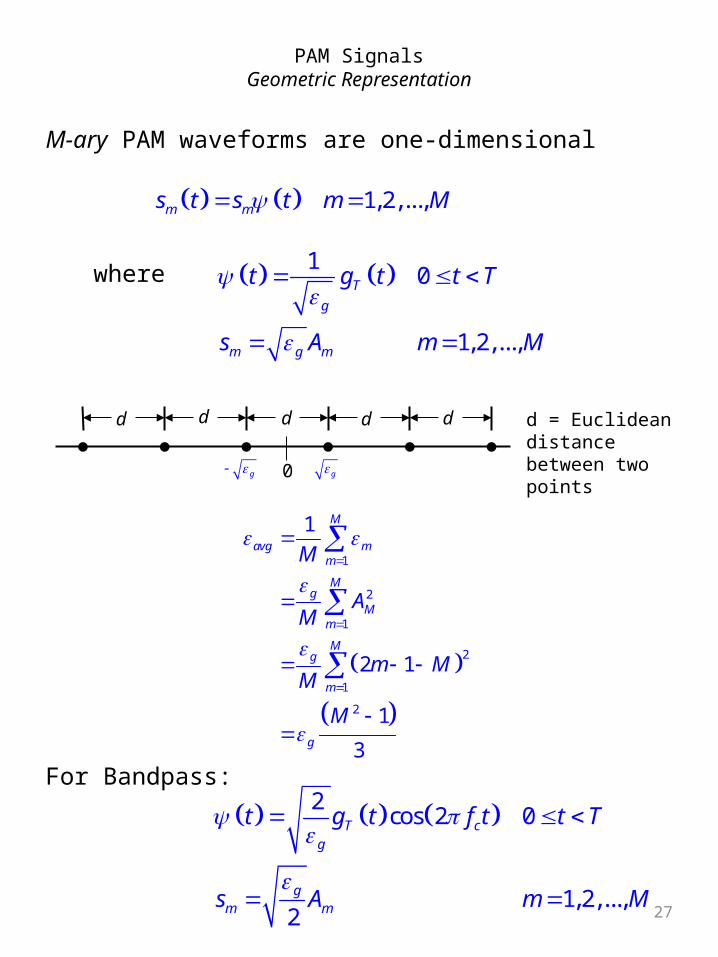
PAM SignalsGeometric Representation
M-ary PAM waveforms are one-dimensional
where
For Bandpass:
1,2,...,m ms t s t m M
10
1,2,...,
T
g
m g m
t g t t T
s A m M
d d d d d
0
d = Euclidean distance between two points
g g
1
2
1
2
1
2
1
2 1
1
3
M
avg mm
Mg
Mm
Mg
m
g
M
AM
m MM
M
2cos 2 0
1,2,...,2
T cg
gm m
t g t f t t T
s A m M

28
Optimum ReceiversStart with the transmission of any one of the M-ary signal waveforms:
1. Demodulatorsa. Correlation-Typeb. Matched-Filter-Type
2. Optimum Detector3. Special Cases (Demodulation and Detection)
a. Carrier-Amplitude Modulated Signalsb. Carrier-Phase Modulation Signalsc. Quadrature Amplitude Modulated Signalsd. Frequency-Modulated Signals
Demodulator Detector mr t s t n t
Sampler
OutputDecision
2 symbols having -bits , 1, 2,...,
Transmitted within timeslot 0
Corrupted with AWGN:
km
m
M k s t m M
t T
r t s t n t
g
g
g
1 2, ,..., Nr t r r r r
ms Tr

29
DemodulatorsCorrelation-Type
0
0
0 0
1,2,...,T
k k
T
m k
T T
m k k
mk k
k Nr r t t dt
s t n t t dt
s t t dt n t t dt
s n
m r s n
2
0/210
2
0/2
0
1,2,...,1| exp /
1exp /
N
m k mkNk
mN
m Mf r s N
N
NN
r s
r s
Next, obtain the joint conditional PDF

30
DemodulatorsMatched-Filter Type
Instead of using a bank of correlators to generate {rk}, use a bank of N linear filters.
The Matched Filter
Demodulator
Key Property: if a signal s(t) is corruptedby AGWN, the filter with impulse response matched to s(t) maximizes the output SNR

31
Optimum Detector
Maximum a Posterior Probabilities (MAP)
If equal a priori probabilities, i.e., for all M and the denominator is a constant for all M, this reduces to maximizing called maximum-likelihood (ML) criterion.
Decision based on transmitted signal
in each signal interval based on the
observation of the vector .r
signal was transmitted | 1,2,...,mP m Ms r
1
||
|
m mm N
m mm
f s PP s
f P
r s
rr s s
1/mP s M
| mf sr
2
1
2
2
, minimum distance detection
, 2 minimize
, 2 maximize (correlation metric)
N
m k mkk
m m m
m m m
D r s
D
C
r s
r s r s s
r s r s s

32
Probability of ErrorBinary PAM Baseband Signals
Consider binary PAM baseband signalswhere is an arbitrary pulse which is nonzero in the interval and zero elsewhere. This can be pictured geometrically as
Assumption: signals are equally likely and that s1 was transmitted. Then the received signal is
Decision Rule:
The two conditional PDFs for r are
1 2 Ts t s t g t Tg t
0 t T
02s 1s
b b
1 br s n n
1s
2sr 0
2
0
2
0
/
1
0
/
2
0
1| e
1| e
b
b
r N
r N
f r sN
f r sN

33
Probability of ErrorM-ary PAM Baseband Signals
Recall baseband M-ary PAM are geometrically represented in 1-D with signal point values of
And, for symmetric signals about the origin,
where the distance between adjacent signal points is .Each signal has a different energies. The average is
1,2,...,m g ms A m M
2 1 1, 2,...,mA m M m M 2 g
1
1
2
1
2
2
1cos
2 1
1
3
1
3
M
av mm
Mg
m
g
g
M
m MM
M M
M
M
2 1
3gav
av
MP
T T







![Reminder Fourier Basis: t [0,1] nZnZ Fourier Series: Fourier Coefficient:](https://static.fdocuments.us/doc/165x107/56649d395503460f94a13929/reminder-fourier-basis-t-01-nznz-fourier-series-fourier-coefficient.jpg)









