Courant Institute of Mathematical Scienceshofer/polyfolds/script1.pdf · 4.4 An Illustration of the...
98
Lectures on Polyfolds and Applications I: Basic Concepts and Illustrations Helmut Hofer ∗† Courant Institute December 3, 2008 Contents 1 Introduction 3 2 Generalizing Smoothness 8 2.1 Sc-Structures on Banach Spaces ................. 9 2.2 Sc-Smooth Maps ......................... 12 2.3 The Chain Rule .......................... 17 2.4 Two Examples for sc-Smoothness ................ 18 3 Generalizing Differential Geometry 26 3.1 New Local Models for Differential Geometry .......... 26 3.2 M-Polyfolds with Boundary with Corners ............ 30 3.3 An Instructive Model Relevant for Gromov-Witten ...... 35 3.4 A Basic Sc-Smoothness Proposition ............... 46 4 Polyfolds and Examples 56 4.1 The Space of Stable Maps as a Motivation ........... 56 4.2 Polyfold Groupoids and Polyfolds ................ 59 4.3 Deligne-Mumford-Type Spaces via Lie Groupoids ....... 69 * Research partially supported by NSF grant DMS-0603957. † Copyright by H. Hofer. Permission is granted for fair use in personal, noncommercial, and academic projects. 1
Transcript of Courant Institute of Mathematical Scienceshofer/polyfolds/script1.pdf · 4.4 An Illustration of the...

Lectures on Polyfolds and Applications I:
Basic Concepts and Illustrations
Helmut Hofer∗†
Courant Institute
December 3, 2008
Contents
1 Introduction 3
2 Generalizing Smoothness 82.1 Sc-Structures on Banach Spaces . . . . . . . . . . . . . . . . . 92.2 Sc-Smooth Maps . . . . . . . . . . . . . . . . . . . . . . . . . 122.3 The Chain Rule . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 Two Examples for sc-Smoothness . . . . . . . . . . . . . . . . 18
3 Generalizing Differential Geometry 263.1 New Local Models for Differential Geometry . . . . . . . . . . 263.2 M-Polyfolds with Boundary with Corners . . . . . . . . . . . . 303.3 An Instructive Model Relevant for Gromov-Witten . . . . . . 353.4 A Basic Sc-Smoothness Proposition . . . . . . . . . . . . . . . 46
4 Polyfolds and Examples 564.1 The Space of Stable Maps as a Motivation . . . . . . . . . . . 564.2 Polyfold Groupoids and Polyfolds . . . . . . . . . . . . . . . . 594.3 Deligne-Mumford-Type Spaces via Lie Groupoids . . . . . . . 69
∗Research partially supported by NSF grant DMS-0603957.†Copyright by H. Hofer. Permission is granted for fair use in personal, noncommercial,
and academic projects.
1

4.4 An Illustration of the Transversal Constraint Construction . . 82
5 The Polyfold Structure in Gromov-Witten Theory 995.1 Stabilization and Good Data . . . . . . . . . . . . . . . . . . . 995.2 A Basis for the Topology on Z . . . . . . . . . . . . . . . . . . 1085.3 The Polyfold Structure . . . . . . . . . . . . . . . . . . . . . . 1125.4 Details of the Polyfold Construction . . . . . . . . . . . . . . . 120
6 Strong Bundles 1246.1 Strong Bundles . . . . . . . . . . . . . . . . . . . . . . . . . . 1246.2 Strong Bundles over Polyfold Groupoids . . . . . . . . . . . . 1296.3 Strong Polyfold Bundles . . . . . . . . . . . . . . . . . . . . . 1326.4 The Example from Gromov-Witten Theory . . . . . . . . . . . 133
7 Polyfold Fredholm Theory 1397.1 Fillable Sections . . . . . . . . . . . . . . . . . . . . . . . . . . 1407.2 Fredholm Sections . . . . . . . . . . . . . . . . . . . . . . . . . 1457.3 Perturbation and Transversality Results . . . . . . . . . . . . 1507.4 Generalizations to Polyfolds . . . . . . . . . . . . . . . . . . . 160
8 The Nonlinear Cauchy-Riemann Operator 1708.1 Some Useful Estimates in Function Spaces . . . . . . . . . . . 1708.2 A Linear Estimate for Families of CR-Operators . . . . . . . . 1828.3 Local Estimates for the Nonlinear CR-Operator . . . . . . . . 1878.4 The Fredholm Property . . . . . . . . . . . . . . . . . . . . . . 202
9 Invariants 2049.1 Orientation, Determinants and Covariant Derivatives . . . . . 2059.2 Sc-Differential Forms and an Integration Theory . . . . . . . . 2139.3 Invariants in the Closed Case . . . . . . . . . . . . . . . . . . 2149.4 The Definition of the Gromov-Witten Invariant . . . . . . . . 214
10 A Functor into Kuranishi Structures 21710.1 Global Finite-Dimensional Reductions . . . . . . . . . . . . . 21710.2 The Functor into Kuranishi Structures . . . . . . . . . . . . . 21810.3 Decorated Perturbations . . . . . . . . . . . . . . . . . . . . . 21810.4 A Bordism Category . . . . . . . . . . . . . . . . . . . . . . . 218
2

11 Appendix 21811.1 Contrasting Smooth and sc-Smooth Retractions . . . . . . . . 21811.2 A Calculus Lemma About Gluing Length . . . . . . . . . . . . 21911.3 Proof of Proposition 3.22 and Theorem 3.24 . . . . . . . . . . 22111.4 Implantation of Local Constructions . . . . . . . . . . . . . . 22711.5 Properties of Gluing Profiles . . . . . . . . . . . . . . . . . . . 23011.6 A Result about Abstract Families of Linear Operators . . . . . 23411.7 Implanting the Hat-Gluing and the Map ψ . . . . . . . . . . . 23811.8 Proof of Lemma 8.5 . . . . . . . . . . . . . . . . . . . . . . . 24411.9 Proof of Lemma 7.48 . . . . . . . . . . . . . . . . . . . . . . . 24411.10More Structured sc+-Multisections . . . . . . . . . . . . . . . 244
12 How to use Polyfold Theory 24412.1 Step 1: What can we Learn from the Solution Set of Interest? 24412.2 Step 2: Constructing the ’Personalized Neighborhood’ . . . . . 24412.3 Step 3: Providing the Analysis . . . . . . . . . . . . . . . . . . 24412.4 Step 4: Application of the ’Tool Box’ . . . . . . . . . . . . . . 244
13 Some Kind of Glossary 24413.1 Generalizations of Smoothness . . . . . . . . . . . . . . . . . . 24413.2 New Local Models for Differential Geometry . . . . . . . . . . 24613.3 Strong Bundles . . . . . . . . . . . . . . . . . . . . . . . . . . 24813.4 Sc-Smooth Sections . . . . . . . . . . . . . . . . . . . . . . . . 250
1 Introduction
At least for the last twenty years elliptic partial differential equations witha lack of compactness have been studied in the literature. Such problemsarise for example in the study of symplectic geometry, like Gromov-Wittentheory, Floer-theory or more generally symplectic field theory, but are veryprominent also in different areas of analysis. One of the nice features of thosearising in symplectic geometry is that the non-compact solution spaces allowquite elaborate compactifications, which have geometric meaning and turnout to be the source of algebraic invariants. Well-known examples are theGromov-compactification of the space of stable holomorphic maps resultingfrom [13] and the SFT-compactification,[3]. However, it has been a long wayto understand these type of problems and to find ways to deal with them.
3

Besides the difficulties arising from compactness problems one of the big is-sues always complicating the discussion are transversality questions. Usuallythe geometric data is not rich enough to achieve transversality and one has toconstruct an artificial larger universe in which the problem can be perturbed.The classical nonlinear Fredholm theory provides such a universe when it isapplicable. However it is not applicable to the problems mentioned abovedue to analytical issues. Meanwhile we know different ways to overcomethe above mentioned difficulties. One of the methods is that of Kuranishistructures pioneered by Fukaya and Ono, [10] and further developed in [12].Another approach is the one described here. The author, jointly with K.Wysocki and E. Zehnder, analyzed the features of this type of problems andthe result of this study is what we call the polyfold Fredholm theory, see[21, 22, 23] and for a summary [18]. The nice thing about this theory is thatit functions like the classical theory which everybody understands very well,but is a much more powerful and flexible machinery than the classical the-ory. Moreover the formalism does not change either and is identical to thatof classical Fredholm theory. The work to build a Kuranishi structure or tobuild a polyfold structure (which is a much finer structure) is approximatelythe same and seems to have more or less the same ingredients. In particu-lar, whenever there exists a Kuranshi structure, there seems to be a polyfoldstructure as well. The polyfold structure captures not only more informationbut comes with a strikingly easier formalism. There is in fact a trivial functorfrom the polyfold Fredholm theory into the Kuranishi structures.
Let us discuss a little bit the issues of Fredholm theory. The Fredholmtheory for Fredholm sections of strong M-polyfold bundles is the theory inthe sc-world parallel to the classical Banach manifold version [41]. The poly-fold version is a generalization of the M-polyfold version which also keepstrack of local symmetries. In the classical theory the ambient space (theBanach manifold) has a very strong differential geometric structure and incase of transversality the zero set of a Fredholm section has a solution setwhich not only is a manifold but also a submanifold of the ambient space.In many cases one is in the first place interested in the solution space anddoes not care too much about the structure of the ambient space or the factthat the solution space is a submanifold. Keeping this in mind one can raisethe question if a Fredholm theory is possible in spaces with less structure.The closest thing to the existing classical theory is then to generalize differ-ential geometry by trying to find an extended list of local models for smoothspaces and to generalize what the regularity properties of a chart should be.
4

A nonlinear Fredholm operator in the classical theory is a smooth map whichlinearized at a point gives a linear Fredholm operator. Consequently one canbring it locally into some normal form. If indeed there is an extended listof smooth local models and a more generous notion what a chart should be,it is feasible that many more maps can be brought into some normal form(using the bigger list of charts) which we associate to Fredholm maps. Hencewe would generalize nonlinear Fredholm theory. In fact this idea works andis described in this lecture: We call it the polyfold Fredhom theory.
The polyfold machinery consists of several parts:
A) The differential geometric part.1) The notion of a smooth map in finite-dimensions is generalized to infinitedimensions in a non-standard way, called sc-smoothness, so that still thechain rule holds and smoothness still detects corners. The latter is importantsince spaces with boundary with corners occur frequently in problems havinga lot of algebraic structure like Floer-type theories.2) Using the new notion of smoothness it becomes possible to generalizedifferential geometry, replacing the open sets in Rn or Banach spaces bynew local models called sc∞-retracts. These sc∞-retracts can have finite orinfinite dimension and is one of the striking features that their local dimensionis in general not constant. Since differential geometry has a quite functorialstructure in general, every classical construction generalizes. For example thenotion of manifold generalizes to that of a M-polyfold and that of an orbifoldto that of a polyfold. In addition new constructions become possible.
B) The abstract Fredholm theory in M-polyfolds and polyfolds1) There is an implicit function theorem in the new context for a sufficientlylarge class of maps leading to a new Fredholm theory.2) There exists a Sard-Smale-type perturbation theory providing a tool tobring Fredholm sections into a general (transversal) position.
C) The nonlinear analysis part.1) A ”library” of examples of sc-smooth maps.2) A construction called splicing which is a large source of new local modelsfor the differential geometry.3) The description of the relevant splicings in Gromov-Witten theory (GW),Floer theory (FT), and symplectic field theory (SFT).
5

4) The Fredholm theory of the nonlinear Cauchy-Riemann operator in GW,FT and SFT.
D) Fredholm theory with operations.1) The study of large families of interacting Fredholm operators.2) The associated perturbation and transversality theory.3) Solution spaces related by operations.
E) Representation theory of data.1) Associating algebraic data to solution spaces related by operations.2) Representation theory for such data.
The current Volume I of this lecture series covers parts A), B) and parts ofC). The figure on the next page shows a finite-dimensional M-polyfold andalso the same M-polyfold with a one-dimensional submanifold. One mightthink of the submanifold as the zero-set of a smooth section of a finite-dimensional bundle with linear fibers over the M-polyfold, having varyingfiber dimensions, which change coherently with the dimensions of the base.Of course, the main applications deal with in finite-dimensional M-polyfoldsor polyfolds, where still, in some sense, the dimensions vary. Bubbling-offusually is connected with jumps in dimensions as we shall see later.
6

B3
B2
B3
B2
S
c1
c2
c1
c2
(a)
(b)
Figure 1: Figure a) shows a finite-dimensional M-polyfold X which is homeo-morphic to the space consisting of the disjoint union of an open three-ball B3
and an open two-ball B2 connected by two curves c1, c2. Figure b) shows thesame M-polyfold containing a one-dimensional S1-like submanifold S. Thissubmanifold could arise as the zero set of a transversal section of a strongM-polyfold bundle Y over X, which has varying dimensions. Namely, overthe tree-ball it is two-dimensional, over the two-disk one-dimensional andotherwise it is trivial. The polyfold theory would then guarantee a naturalsmooth structure on the solution set S.
7

2 Generalizing Smoothness
The first step consists of generalizing the notion of a smooth structure on aBanach space which in finite dimensions still is the standard notion, but ininfinite dimensions is disjoint from the standard generalization. This notionof smooth structure on a Banach space will be called a sc-structure. Thenwe introduce the notion of an sc-smooth map.
The reader should recall that a map f : U → F , where F is a Banachspace and U an open subset in the Banach space E, is said to be differentiableat the point x ∈ U provided there exists a bounded linear operator df(x) ∈L(E,F ) so that
limh→0
1
‖h‖E· ‖f(x+ h)− f(x)− df(x)h‖F = 0.
This notion of differentiability is called, more precisely, Frechet differentia-bility, but we shall just refer to it as (classical) differentiability. The map issaid to be of class C1, provided the map
U → L(E,F ) : x→ df(x)
is continuous, where L(E,F ) is obtained with its operator norm. If the lattermap is C1 we say that f is of class C2. Inductively one defines what it meansto be of class Ck. A map which is of class Ck for all k, is said to be of classC∞.
Differentiability is, of course, a notion (or measurement), of the regularityof a map. One of the important features of this notion of differentiabilityis that it comes with an implicit function theorem. As one can developdifferentiable geometry in finite-dimensions starting with finite-dimensionalcalculus, Frechet-differentiability allows to carry everything over to infinitedimensions provided one has smooth partitions of unity (they are automaticin finite dimensions but not in infinite dimensions with the exception beingHilbert spaces.)
Our aim is to find a class of less regular maps, generalizing finite-dimensionaldifferentiability, which still have a sufficient amount of structure to be able todevelop a new kind of infinite-dimensional differential geometry. The purposeis to study larger classes of nonlinear problems.
8

2.1 Sc-Structures on Banach Spaces
Scales of Banach spaces are a well-known object and occur for example ininterpolation theory, see [43]. From our point of view such scales shouldbe viewed as a generalization of a smooth structure in finite dimensions toinfinite-dimensions which is different from the usual generalization. We areonly interested in a certain class of scales. The following definition is takenfrom [21]. Put N = 0, 1, 2, ..
Definition 2.1. A sc-structure on a Banach space E consists of a nestedsequence of Banach spaces (Ei)i∈N with E0 = E, Ei+1 ⊂ Ei, so that thefollowing two conditions hold.
1) The inclusion maps Ei+1 → Ei are compact.
2) The set E∞ :=⋂i∈N
Ei is dense in every Ei.
A Banach space E equipped with an sc-structure is called an sc-Banach space.
An obvious example is E = L2([0, 1],R) and Ei being the standardSobolev scale Ei = H i,2([0, 1],R).
Given two sc-Banach spaces E and F , a linear sc0-operator Φ : E → Fis by definition a linear operator Φ : E → F mapping Em into Fm so thatΦ : Em → Fm is continuous. Given two sc-Banach spaces E and F thetopological direct sum E ⊕ F has an sc-structure defined by
(E ⊕ F )m = Em ⊕ Fm.
Observe that the only sc-structure of Rn is the constant structure (Ei), Ei =Rn. In the following we shall see that this corresponds to to standard smoothstructure on Rn.
Since we need for our applications a theory allowing the domains and co-domains to have boundaries with corners, we have to introduce the notion ofa partial quadrant C in an sc-Banach space E.
Definition 2.2. A partial quadrant C in E is a closed convex subset sothat there exists an sc-Banach space F and a linear sc-isomorphism S : E →Rk ⊕ F for some k ∈ N mapping C onto [0,∞)k ⊕ F .
Let E be an sc-Banach space and let C ⊂ E be a partial quadrant.Assume that U ⊂ C is relatively open. We have on U an induced filtration
9

Ui defined by Ui = U∩Ei, which we call the sc-structure on U . Given U withan sc-structure we can equip Ui0 with an sc-structure by defining (Ui0)m :=Ui0+m. We write U i0 for Ui0 equipped with this specific sc-structure. If U andV are equipped with sc-structures, the space U ⊕ V consists of the obviousset U × V , equipped with the sc-structure given by the filtration Um ⊕ Vm.If U is as described above its tangent is defined by
TU = U1 ⊕E.We note that TC = C1 ⊕ E. This is a partial quadrant in TE. Indeed, ifΦ : E → Rn ⊕W is a sc0-isomorphism mapping C to [0,∞)n ⊕W . ThenTΦ : TE → T (Rn ⊕W ) maps TC = C1 ⊕ E to [0,∞)n ⊕W 1 ⊕ Rn ⊕W ,which is sc-isomorphic to T ([0,∞)n)⊕ TW .
Here are two concrete examples.
Example 2.1. We start with the Hilbert space E = L2(R × S1) of (equiv-alence classes of) measurable square-integrable functions on the cylinderR× S1. For us S1 = R/Z.
a) Next define the weighted Sobolev space Hm,δ(R × S1) where δ ≥ 0as follows. It consist of all f ∈ L2(R × S1) so that (s, t) → (Dαf)(s, t)eδ|s|
belongs to L2(R× S1) for all multi-indices α satisfying 0 ≤ |α| ≤ m. Givena strictly increasing sequence of weights δm with
δ0 = 0 < δ1 < δ2..
we can define Em = Hm,δm(R×S1). In that case, using the compact Sobolevembedding for bounded domains and the increasing weights, we can showthat the embedding Ei+1 → Ei is compact. Clearly E0 = E and we obtain asc-structure on E = L2(R× S1).
b) Consider E = Rn ⊕ L2(R × S1) where L2 is equipped with the sc-structure just defined. Then E has a natural sc-structure. We can define apartial quadrant C by C = [0,∞)n ⊕ L2(R× S1).
The notion of a continuous map f : U → V between two relatively opensets in partial quadrants with sc-structures is the following.
Definition 2.3. A map f : U → V is said to be sc0 provided for everym ∈ N we have f(Um) ⊂ Vm and f : Um → Vm is continuous.
Here is an example. We assume that E = L2(R × S1) is equipped withthe previously defined sc-structure.
10

Proposition 2.4. The shift-map
Φ : R2 ⊕ L2(R× S1)→ L2(R× S1) : (c, d, u)→ (c, d) ∗ u
with ((c, d) ∗ u)(s, t) = u(s+ c, t+ d) is sc0.
Proof. To see this fix a level m. It is easy to see that in every Em the smoothcompactly supported maps are dense. Indeed, for this it suffices to know thatcompactly supported smooth maps are dense in the standard Sobolev spacesHm(R× S1), see for example [11]. We estimate ‖(c, d) ∗ u‖m as follows.
‖(c, d) ∗ u‖2m =∑
|α|≤m
∫|(Dαu)(c+ s, t+ d))|2e2δm|s|dsdt
≤∑
|α|≤m
∫|(Dαu)(s+ c, t+ d)|2e2δm|s+c|e2δm|c|dsdt
= e2δm|c|‖u‖2m.
Hence we have obtained the estimate
‖(c, d) ∗ u‖m ≤ eδm|c|‖u‖m.
If v is smooth and compactly supported then (c, d)∗v → v in C∞ as (c, d)→0. This, of course, implies for every m that
lim(c,d)→(0,0)
‖(c, d) ∗ v − v‖m = 0.
Let u0 and u be in Em and v a compactly supported smooth map. Then
‖ (c, d) ∗ u− u0 ‖m= ‖ ((c, d) ∗ u− (c, d) ∗ u0) + ((c, d) ∗ u0 − (c, d) ∗ v)
+((c, d) ∗ v − v) + (v − u0) ‖m≤ eδm|c| · (‖ u− u0 ‖m + ‖ u0 − v ‖m) + ‖ (c, d) ∗ v − v ‖m + ‖ v − u0 ‖m≤
(eδm|c| + 1
)· (‖ u− u0 ‖m + ‖ u0 − v ‖m)+ ‖ (c, d) ∗ v − v ‖m .
Given ε > 0 we chose v so that ‖ u0 − v ‖m< ε. Thus for all ‖ u− u0 ‖m< εand |c| small enough we have
‖ (c, d) ∗ u− u0 ‖m≤ 10 · ε+ ‖ (c, d) ∗ v − v ‖m
11

and taking |(c, d)| even smaller, the right hand side is smaller than 11 · ε.This proves the continuity at the point (0, u0). Observing that
(c, d) ∗ u− (c0, d0) ∗ u0 = (c− c0, d− d0) ∗ ((c0, d0) ∗ u)− (c0, d0) ∗ u0
we obtain continuity on level m at every point by the previous discussionapplied to (c0, d0) ∗ u0 and using the fact that u → (c0, d0) ∗ u is an sc0-operator.
2.2 Sc-Smooth Maps
Having introduced an appropriate notion of continuity, we shall define whatit means that f is sc1. This is the sc-generalization of the notion of being ofclass C1.
Definition 2.5. Let U ⊂ C ⊂ E and V ⊂ D ⊂ F be relatively opensubsets of partial quadrants in sc-Banach spaces. A sc0-map f : U → Vis said to be sc1 provided for every x ∈ U1 there exists a continuous linearoperator Df(x) : E0 → F0 so that the following holds.
1) For h ∈ E1 with x+ h ∈ C ⊂ E we have
lim‖h‖1→0
1
‖h‖1· ‖f(x+ h)− f(x)−Df(x)h‖0 = 0.
2) The map Tf defined by Tf(x, h) = (f(x), Df(x)h) for (x, h) ∈ TUdefines a sc0-map Tf : TU → TV .
We call 1) the approximation property. Let us emphasize that in generalthe operator Df(x) ∈ L(E0, F0) does not depend as an operator continuouslyon x ∈ U1. We only require that the map (x, h) → Df(x)h is continuous,which in infinite-dimensions is a much weaker requirement. Indeed, it pre-cisely means that the map x→ Df(x) is a continuous map into L(E0, F0)co,where the subscript co means that the space of bounded linear operators isequipped with the compact open topology which is a much coarser topologythan the norm topology.
Inductively we can define what it means that f is sck or sc∞. Indeed, iff is sc1 then Tf is defined and of class sc0. We say that f is sck providedT k−1f is sc1 which defines our notion inductively. A map f is sc∞ providedit is sck for all k.
In order to get a feeling for the sc1-notion we prove the following.
12

Lemma 2.6. If f : U → V is sc1 then f : U1 → V0 ⊂ F0 is C1.
Proof. The derivative df(x) of f : U1 → F0 at the point x ∈ U1 is obviouslydf(x) = Df(x)|E1 ∈ L(E1, F0). We only have to show that the map
U1 → L(E1, F0) : x→ df(x)
is continuous. Arguing indirectly we find a x ∈ U1, a sequence (xn) ⊂ U1
converging in E1 to x, and sequence of unit vectors (hn) ⊂ E1, ‖ hn ‖1= 1,so that for a suitable positive ε we have
‖ df(xn)hn − df(x)hn ‖0≥ ε.
After perhaps taking a subsequence we may assume in addition that hn → hin E0 for a suitable h using the compact embedding E1 → E0. Now we usethat
df(xn)hn − df(x)hn = Df(xn)hn −Df(x)hn → Df(x)h−Df(x)h = 0
since Tf is sc0. This contradiction proves the desired result.
Let us observe the following. If f : U → V is a sc0-map then the inducedmap f : U1 → V 1 is sc0 as well. The same is true for sc1-maps, but this isnot immediately obvious.
Lemma 2.7. If f : U → V is a sc1-map then the induced map f : U1 →V 1 is also sc1.
Proof. It is clear that Tf induces a sc0-map (TU)1 → (TV )1. Observe thattrivially T (U1) = (TU)1 and the same for V . Hence Tf : T (U1)→ T (V 1) issc0. It suffices therefore to show that
lim‖h‖2→0
1
‖h‖2‖f(x+ h)− f(x)−Df(x)h‖1 = 0.
For h ∈ E2 small enough so that x+h ∈ C we may assume that x+th ∈ U2 fort ∈ [0, 1] since U is relatively open in C. The map [0, 1]→ F : t→ f(x+ th)is continuously differentiable since f : U1 → F is C1 in view of the previouslemma. Hence we have
f(x+ h)− f(x)−Df(x)h =
∫ 1
0
(Df(x+ th)−Df(x))h dt.
13

Dividing by ‖h‖2 we obtain
‖f(x+ h)− f(x)−Df(x)h‖1‖h‖2
= ‖∫ 1
0
(Df(x+ th)−Df(x))h
‖h‖2dt‖1.
We need to show that
‖∫ 1
0
(Df(x+ th)−Df(x))h
‖h‖2dt‖1 → 0 as ‖h‖2 → 0.
Arguing indirectly we find a sequence hn → 0 in E2 with x + thn ∈ U2 fort ∈ [0, 1] and ε > 0 so that
‖∫ 1
0
(Df(x+ thn)−Df(x))hn‖hn‖2
dt‖1 ≥ ε.
Define kn = hn/‖hn‖2 and after perhaps taking a subsequence we may assumethat kn → k in E1 for a suitable k. Let us observe that the family of maps[0, 1] → E2 : t → x + thn converges in C0([0, 1], E2) to the constant mapt→ x. Using that Tf is sc0 we see that the maps
[0, 1]→ (Df(x+ thn)−Df(x))kn
converge in C0([0, 1], F1) to the zero-map. This implies that the associatedsequence of integrals converges to 0 in F1, giving a contradiction. This com-pletes the proof.
We can use Lemma 2.7 to prove inductively
Proposition 2.8. If f : U → V is sck so is f : U1 → V 1. Here U andV have the usual meaning.
Proof. The assertion was already proved for k = 1. Proceeding inductivelyassume it was proved for all maps of class sck. Assume next that f is ofclass sck+1. Then Tf : TU → TV is of class sck and therefore by inductionhypothesis Tf : (TU)1 → (TV )1 is of class sck. Now using that T (U1) =(TU)1 and similarly for V we have proved that
Tf : T (U1)→ T (V 1)
is of class sck. This precisely means that f : U1 → V 1 is of class sck+1.
14

The following proposition generalizes Lemma 2.6.
Proposition 2.9. If f : U → V is sck, then for every m ≥ 0 the mapf : Um+k → Vm is Ck. Since for 0 ≤ ℓ ≤ k the map f is also scℓ we have inaddition that f : Um+ℓ → Vm is of class Cℓ.
Proof. If f : U → V is sck so is f : Um → V m. Hence it suffices to show thatf : U → V being of class sck implies that f : Uk → F0 is of class Ck since thesame argument applies to f : Um → V m. We prove the result by inductionwith respect to k (and may assume that m = 0).
We already know that the statement is true for k = 1, see Lemma 2.6.Assume it has been proved for k and f is sck+1. Then f is in particular sck sothat f : Uk → F0 is Ck by induction hypothesis. Then also f : Uk+1 → F is ofclass Ck. Also Tf : TU → TF is of class sck and therefore Tf : (TU)k → TFis Ck as well. If π : TF → F is the projection onto the last factor we seethat
π Tf : (TU)k → F : (x, h)→ Df(x)h
is of class Ck. Hence
Φ : Uk+1 ⊕ Ek → F : (x, h)→ Df(x)h
is Ck. Taking k derivatives but only with respect to x we obtain a continuousmap
Uk+1 ⊕ Ek → L(Ek+1, .., Ek+1;F ) : (x, h)→ (DkxΦ)(x, h).
Observe that the map is linear in h. Using the compact embedding Ek+1 →Ek we obtain for every x ∈ Uk+1 a multi-linear map
Ek+1 ⊕ ...⊕Ek+1 → F : (h1, .., hk, h)→ (DkxΦ)(x, h)(h1, .., hk),
which we denote by Γ(x). Let us show that Γ : Uk+1 → L(Ek+1, .., Ek+1;F ) iscontinuous. Indeed, arguing indirectly we find xn → x in Uk+1 and hi,n, hn ∈Ek+1, all of unit length, so that
‖ (Γ(xn)− Γ(x))(h1,n, .., hk,n, hn) ‖0≥ ε > 0.
After perhaps taking a subsequence we may assume that hn → h in Ek.Now (xn, hn) → (x, h) in Uk+1 ⊕ Ek and (Dk
xΦ)(xn, hn) → (DkxΦ)(x, h) in
15

L(Ek+1, .., Ek+1;F ) which implies that
lim supn→∞
‖ (Γ(xn)− Γ(x))(h1,n, .., hk,n, hn) ‖0
= lim supn→∞
‖ ((DkxΦ)(xn, hn)− (Dk
xΦ)(x, hn))(h1,n, .., hk,n) ‖0
≤ lim supn→∞
‖ (DkxΦ)(xn, hn)− (Dk
xΦ)(x, hn) ‖L(Ek+1,..,Ek+1;F )
= limn→∞
‖ (DkxΦ)(xn, hn)− (Dk
xΦ)(x, hn) ‖L(Ek+1,..,Ek+1;F )
= ‖ (DkxΦ)(x, h)− (Dk
xΦ)(x, h) ‖L(Ek+1,..,Ek+1;F )
= 0
Let us consider now the limit of1
‖ δx ‖k+1
· [Dkf(x+ δx)−Dkf(x)− Γ(x)(...., δx)]
in L(Ek+1, .., Ek+1;F ). We claim the limit is zero proving that f : Uk+1 → Fis of class Ck+1. For δx ∈ Ek+1 small and x ∈ Uk+1 and t ∈ [0, 1] we considerthe Ck-map into F given by
(t, x, δx)→ Df(x+ tδx)δx.
Integrating with respect to t gives the Ck-map
(x, δx)→ f(x+ δx)− f(x).
Differentiating k times with respect to x with h1, .., hk ∈ Ek+1 gives
Dkf(x+ δx)(h1, .., hk)−Dkf(x)(h1, .., hk)
= Dkx(f(x+ δx)− f(x))(h1, ..., hk)
= Dkx
(∫ 1
0
(Df(x+ tδx)δx)dt
)(h1, .., hk)
=
∫ 1
0
Dkx((Df(x+ tδx)δx)(h1, .., hk)dt
=
∫ 1
0
Γ(x+ tδx)(h1, ..., hk, δx)dt.
Hence1
‖ δx ‖k+1· [(Dkf(x+ δx)−Dkf(x))(h1, .., hk)− Γ(x)(h1, .., hk, δx)]
=
∫ 1
0
[(Γ(x+ tδx)− Γ(x))(h1, ..., hk,δx
‖ δx ‖k+1)]dt.
16

We already proved that the map Uk+1 → L(Ek+1, .., Ek+1;F ) : x → Γ(x) iscontinuous which implies that the above converges to 0 as δx → 0 in Ek+1.Hence we have proved that f being sck+1 implies that f : Uk+1 → F isCk+1.
2.3 The Chain Rule
It is a crucial result that the chain rule holds for sc-smooth maps.
Theorem 2.10. Assume that U , V and W are relatively open subsets ofpartial quadrants of sc-Banach spaces and f : U → V and g : V → W aresc1. Then g f : U →W is sc1 and T (g f) = (Tg) (Tf).
Proof. As we have already proved, the maps g : V1 → G and f : U1 → F areof class C1. First of all we note that Dg(f(x))Df(x) for x ∈ U1 belongs toL(E0, G0). Pick x ∈ U1, h ∈ E1 close to x so that in addition x+ th ∈ U1 fort ∈ [0, 1]. Then f(x+ th) ∈ V1 and we compute
g(f(x+ h))− g(f(x))−Dg(f(x))Df(x)h (1)
=
∫ 1
0
Dg(tf(x+ h) + (1− t)f(x))(f(x+ h)− f(x)−Df(x)h)dt
+
∫ 1
0
(Dg(tf(x+ h) + (1− t)f(x))−Dg(f(x)))Df(x)hdt.
=: I + II (2)
We divide the first expression by ‖h‖1 giving us
I
‖h‖1(3)
=
∫ 1
0
[Dg(tf(x+ h) + (1− t)f(x))
(f(x+ h)− f(x)−Df(x)h)
‖h‖1
]dt.
Since h ∈ E1 \ 0 the map [0, 1]→ F1 defined by
t→ tf(x+ h) + (1− t)f(x)
is continuous and converges if h → 0 in E1 in C0([0, 1], F1) to the constantmap t→ f(x). Since f is sc1 we have
a(h) :=1
‖h‖1(f(x+ h)− f(x)−Df(x)h)→ 0 in F0
17

as ‖h‖1 → 0. Using the continuity assumption in the definition of sc1 themap
(t, h)→ Dg(tf(x+ h) + (1− t)f(x))a(h)
is continuous and as ‖h‖1 → 0 the family of maps
t→ Dg(tf(x+ h) + (1− t)f(x))a(h)
converges uniformly to 0 in C0([0, 1], G0). Hence (3) converges to 0 as‖ h ‖1 → 0. The second expression from (1) is more subtle. Again we divideby ‖h‖1 and obtain
∫ 1
0
(Dg(tf(x+ h) + (1− t)f(x))−Dg(f(x)))Df(x)
(h
‖h‖1
)dt. (4)
Since we have a compact embedding E1 → E0, the closure of the set of allh/‖h‖1, h ∈ E1 \ 0, in E0 is compact. Since Df(x) ∈ L(E0, F0) the closureof the set of all
Df(x)h
‖h‖1is compact in F0. Hence, for every sequence hn ∈ E1 converging in E1 to 0we may assume after taking a suitable subsequence that
Df(x)hn‖hn‖1
→ k
in F0 for some k. Using the sc0-continuity property for Dg we see that theexpression in (4) converges to 0 in G0. This completes the proof of the chainrule.
2.4 Two Examples for sc-Smoothness
The following example (in some modification) is very important in dealingwith bubbling-off phenomena of pseudoholomorphic curves.
Consider the Hilbert space E = L2(R×S1) equipped with the sc-structureEm, where Em = Hm,δm(R × S1). Here (δm) with δ0 = 0 is an increasingsequence of exponential weights. We consider the action of R2 defined by
Φ : R2 ⊕E → E : ((c, d), u)→ (c, d) ∗ u,where
((c, d) ∗ u)(s, t) = u(s+ c, t+ d).
The important result is
18

Proposition 2.11. The map Φ is sc-smooth.
Proof. We already know that the map is sc0. Let us first show that the mapis sc1. The candidate for DΦ((c, d), u) ∈ L(R2 ⊕ E0, E0) where u ∈ E1 isgiven by
DΦ((c, d), u)((h, k), v) = (c, d)∗ [h ·us+k ·ut+v] = Φ((c, d), h ·us+k ·ut+v)
We note that the map
(R2 ⊕ E)1 ⊕ (R2 ⊕ E)→ E (5)
((c, d), u, (h, k), v)→ Φ((c, d), h · us + k · ut + v)
is sc0. Indeed, we already know that the map
R2 ⊕E → E : ((c, d), v)→ Φ((c, d), v)
is sc0. The two maps E1 → E given by u → us and u → ut are sc0. Scalarmultiplication is a sc0-map
R⊕E → E.
Hence we see that the map in (5) can be written as the composition ofobvious sc0-maps and therefore is sc0. It remains to show the approximationproperty. We need to show that
lim‖(h,k,v)‖1→0
‖ Φ(c+ h, d+ k, u+ v)− Φ(c, d, u)− Φ(c, d, v + hus + kut) ‖0‖ (h, k, v) ‖1
= 0.
If this is proved we have by definition
DΦ(c, d, u)(h, k, v) = Φ(c, d, v + hus + kut).
The right-hand side is sc0 so that DΦ has the required properties. We con-sider
Φ(c+ h, d+ k, u+ v)− Φ(c, d, u)− Φ(c, d, h · us + k · ut + v)
= Φ(c+ h, d+ k, u)− Φ(c, d, u)− Φ(c, d, h · us + k · ut)+Φ(c+ h, d+ k, v)− Φ(c, d, v).
To continue we first show
lim‖(h,k,v)‖1→0
‖ Φ(c + h, d+ k, u)− Φ(c, d, u)− Φ(c, d, h · us + k · ut) ‖0‖ (h, k, v) ‖1
= 0.
19

We note that Φ(c, d, .) : E0 → E0 is an isometry so that it suffices to showthat
lim‖(h,k,v)‖1→0
‖ Φ(h, k, u)− u− h · us − k · ut) ‖0‖ (h, k, v) ‖1
= 0.
Of course this will hold true if we can show that
lim‖(h,k)‖1→0
‖ Φ(h, k, u)− u− h · us − k · ut) ‖0‖ (h, k) ‖1
= 0.
If u is compactly supported and smooth we calculate
Φ(c, d, u)− u− cus − dut
=
∫ 1
0
[Φ(τc, τd, cus + dut)− (cus + dut)]dτ.
If u is now in E1 we take a sequence of compactly supported smooth mapsconverging in E1 to u, say (un). We see that we can pass in the above identityto the limit and find that it holds for arbitrary u ∈ E1. We note that
‖ Φ(τc, τd, cus + dut)− (cus + dut) ‖0≤ |c|· ‖ Φ(τc, τd, us)− us ‖0
+|d|· ‖ Φ(τc, τd, ut)− ut ‖0 .
By the continuity property of Φ we see that this expression divided by |(c, d)|converges to 0 uniformly for τ ∈ [0, 1] as (c, d)→ (0, 0). Hence
1
|(c, d)| · ‖ Φ(c, d, u)− u− cus − dut ‖0
≤∫ 1
0
1
|(c, d)|· ‖ Φ(τc, τd, cus + dut)− (cus + dut) ‖0 dτ
≤∫ 1
0
1
|(c, d)| · |c|· ‖ Φ(τc, τd, us)− us ‖0 dτ
+
∫ 1
0
1
|(c, d)| · |d|· ‖ Φ(τc, τd, ut)− ut ‖0 dτ.
where the latter converges to 0 as (c, d) → 0. The more tricky part is toshow that
lim‖(h,k,v)‖1→0
‖Φ(c+ h, d+ k, v)− Φ(c, d, v)‖0‖(h, k, v)‖1
= 0.
20

This only is true due to the compact embedding E1 → E0. Arguing indirectlywe find a sequence (hn, kn, vn)→ (0, 0, 0) in R2 ⊕E1 and a ε > 0 so that
‖Φ(c + hn, d+ kn, vn)− Φ(c, d, vn)‖0‖ (hn, kn, vn) ‖1
≥ ε. (6)
The sequence (wn) = (vn/ ‖ (hn, kn, vn) ‖1) is ‖ · ‖1-bounded by 1 andwe may assume, using the compact embedding E1 → E after passing to asubsequence, that wn → w in E0. Hence by the already established sc0-continuity of Φ we conclude that
limn→∞
Φ(c + hn, d+ kn, vn)− Φ(c, d, vn)
‖ (hn, kn, vn) ‖1= lim
n→∞Φ(c + hn, d+ kn, wn)− Φ(c, d, wn)
= Φ(c, d, w)− Φ(c, d, w) = 0
contradicting (6). At this point we finished the proof that Φ is sc1. It isworthwhile to point out that the compact embedding E1 → E0 is absolutelycrucial. The tangent map has the form
TΦ(c, d, u, h, k, v) = (Φ(c, d, u),Φ(c, d, v + h · us + k · ut)).
This allows an easy inductive argument to show the higher sc-differentiability.We prove by induction the following statement:
(Sk) The map Φ is sck and for every projection π : T kE → Ej onto one ofthe summands, the map π T kΦ is a finite linear combination of expressionsof the form
R2 ⊕ Em ⊕R|α| :→ Ej : (c, d, u, h)→ Φ(c, d, h1 · ... · h|α| ·Dαu)
with |α| ≤ m− j being a multi-index.
For k = 1 we have seen that Φ is sc1 and π TΦ consists of R2 ⊕ E1 →E1 : (c, d, u) → Φ(c, d, u) if π is the projection onto the first factor and if πis the projection onto the second factor it is the sum of the expressions
R2 ⊕E → E : (c, d, v)→ Φ(c, d, v)
andR2 ⊕E1 ⊕ R→ E : (c, d, v, h)→ Φ(c, d, hDαv),
21

where α = (1, 0) or α = (0, 1). Hence (S1) holds. Assume now that (Sk)holds. Take any expression π T kΦ which we know is sc0 and the sum ofexpressions of the form described above. Hence consider
R2 ⊕Em ⊕ R|α| :→ Ej : (c, d, u, h)→ Φ(c, d, h1 · ... · h|α| ·Dαu),
where |α| ≤ m − j. It suffices to show that all such expressions are sc1 inorder to obtain that Φ is sck+1. That π T k+1Φ satisfies the other part ofstatement (Sk+1) follows then almost trivially. Let us observe that the aboveexpression can be written as a composition of the following maps. The firstone is
R2 ⊕Em ⊕ R|α| → R2 ⊕ Ej : (c, d, u, h)→ (c, d, h1 · .. · h|α|Dαu)
which obviously is sc∞. The second map is
Φ : R2 ⊕Ej → Ej.
By induction hypothesis and a previous lemma about raising the levels Φ :R2 ⊕ Ej → Ej is sck (k ≥ 1). Hence we see that the composition is at leastsc1. This is true for all such expressions implying that Φ is sck+1. If we nowtake T k+1Φ = T (T kΦ) and consider π T k+1Φ then, if π is a projection ontoone of the first 2k factors, we obtain that it is a sum of expressions of theform as described in (Sk), obtained from the old expressions by raising theindex by one. The next 2k expressions are derivatives of expressions givenby (Sk). Hence if we started with a
R2 ⊕ Em ⊕R|α| :→ Ej : (c, d, u, h)→ Φ(c, d, h1 · ... · h|α| ·Dαu)
we find that the derivative is given by a map
R2 ⊕ Em+1 ⊕ R|α| ⊕ R2 ⊕ Em ⊕R|α| → Ej
defined by
(c, d, u, h, δc, δd, δv, δh)→ Φ(c, d, h1 · ... · h|α| ·Dαδv)
+
|α|∑
ℓ=1
Φ(c, d, h1 · ..δhℓ · ..h|α| ·Dαu)
+ Φ(c, d, h1 · .. · h|α|(δc · (∂sDαu) + δd · (∂tDαu))).
22

This is the sum of expressions of the form
R2 ⊕ Em ⊕ R|α| → Ej : (c, d, v, h)→ Φ(c, d, h1 · .. · h|α| ·Dαv)
with |α| ≤ m− j, and
R2 ⊕ Em+1 ⊕R|α| → Ej
(c, d, u, (h1, .., δhℓ, .., h|α|))→ Φ(c, d, h1 · ..δhℓ · ..h|α|Dαu)
with |α| ≤ m− j ≤ m+ 1− j, and finally
R2 ⊕Em+1 ⊕ R|α|+1 → Ej : (c, d, u, (h, γ))→ Φ(c, d, h1..h|α|γDβu),
where β = α + (1, 0) or β = α + (0, 1). Then |β| = |α| + 1 ≤ m + 1 − j.Hence we see that Φ satisfies (Sk+1) and the proof is complete.
The following criterion for sc-smoothness will be quite useful.
Proposition 2.12. Assume that U and V are relatively open subsets ofpartial quadrants in the sc-spaces E and F , respectively. Further supposethat the map f : U → V for every m ≥ 0 and 0 ≤ ℓ ≤ k induces a map
f : Um+ℓ → Fm
of class Cℓ+1. Then f is sck.
Proof. We prove this by induction with respect to k. In order that the in-duction runs smoothly we have to prove slightly more:
(Sk) If f : U → V satisfies that f : Um+ℓ → Fm is of class Cℓ+1 for all mand 0 ≤ ℓ ≤ k then f is of class sck. Moreover if π : T kF → F q denotes theprojection onto any factor, the composition πT kf(x) is a linear combinationof sc0-maps of the following kind, where we write x = (x1, ..., x2k) ∈ T kU :
Uk ⊕ Em1 ⊕ ..⊕ Emj → F q : (x1, xk1, .., xkj)→ dj(x1)(xk1, .., xkj
),
where 0 ≤ j ≤ k − q, x1 ∈ Uk, and xki∈ Emi
with mi ≥ j − 1 + q.
We first verify (S1). Then f : Um+ℓ → Fm is of class Cℓ+1 for ℓ ≤ 1.Using that f : U1 → F0 is C2 we clearly have the approximation property.
23

Since f : Um → Fm is of class C1 the map Tf(x, h) = (f(x), df(x)h) definesa sc0-map
TU → TF.
Hence f is sc1. We have the projections π : TF → F 1 (onto the first factor)and π : TF → F onto the second factor. In the first case
π Tf(x1, x2) = f(x1)
expressed by the map f : U1 → F 1. Therefore q = 1, k = 1, j = 0. Clearly0 ≤ j ≤ k − q. The other condition is vacuous. In the second case
π Tf(x1, x2) = df(x1)(x2).
This is expressed by
U1 ⊕ E → F : (x, h)→ df(x)h.
Here j = 1, q = 0, m1 = 0 and k = 1. We verify 0 ≤ j ≤ k − q andm1 ≥ j − 1 + q. Of course both maps are sc0. This completes the proof ofour assertion.
Next assume that we have established (Sk) and we show that (Sk+1)holds. Assume that f : Um+ℓ → Fm is of class Cℓ+1 for all ℓ ≤ k + 1 andall m. Then by induction hypothesis statement (Sk) holds and this impliesthat T kf is sc0 and in addition we have structural statements about all theπ T kf . Pick a π : T kF → F q and take any of the terms making up π T kf .Such a term has the form
Uk ⊕ Em1 ⊕ ..⊕ Emj → F q : (x, h1, .., hj)→ djf(x)(h1, .., hj)
with mi ≥ q + j − 1 and 0 ≤ j ≤ k − q. We show first that this map is sc1.For this we first verify the approximation property and consider the map
Uk+1 ⊕Em1+1 ⊕ ..⊕ Emj+1 → Fq : (x, h1, .., hj)→ djf(x)(h1, .., hj). (7)
By assumption f : Uq+m+j → Fq+m is of class Cj+1 for all m. Hence the map
Uq+j ⊕ Eq+j ....⊕ Eq+j → Fq : (x, h1, .., hj)→ djf(x)(h1, .., hj)
is of class C1. Note that mi + 1 ≥ j + q and k+ 1 ≥ q+ j + 1. Hence we seethat the map in (7) is of class C1. The derivative has the form
Uk+1 ⊕ Em1+1 ⊕ ..⊕Emj+1 ⊕Ek+1 ⊕Em1+1..⊕ Emj+1 → Fq
(x, h1, .., hj, δx, δh1, .., δhj)→dj+1f(x)(δx, h1, .., hj) +
∑ji=1 d
jf(x)(h1, .., hi−1, δhi, hi+1, .., hj).
24

Now we observe that the following map is sc0
Uk+1 ⊕ Ek ⊕Em1+1..⊕ Emj+1 → F q (8)
(x, δx, h1, .., hj)→ dj+1f(x)(δx, h1, .., hj).
This follows since k,m1 + 1, .., mj + 1 ≥ q + j and f : Uj+q+m → Fq+m is ofclass Cj+1. The map
Uk+1 ⊕ Em1+1..⊕Emi−1+1 ⊕ Emi ⊕Emi+1+1..⊕ Emj+1 → F q (9)
(x, h1, .., δhi, .., hj)→ djf(x)(x, h1, .., δhi, .., hj)
is sc0 as a consequence of our induction hypothesis. From the previous dis-cussion we see that (Sk+1) implies that T k+1f is of class sck+1. Next considerthe terms occurring for π T k+1f . If π is a projection onto the first 2k sum-mands we see the terms guaranteed by the induction hypothesis (Sk) butwith the index of the spaces raised by one. If we project onto any of thelast 2k summands the previous discussion shows that they are sums of theexpressions given in (8) and (9). Let us denote the new values for the quanti-ties j, k etc. by primed symbols. For (8) we see that m′
1 = k, m′i = mi−1 + 1
for i = 2, .., j + 1. Further q′ = q, j′ = j + 1 and k′ = k + 1. Observe that0 ≤ j′ = j + 1 ≤ k − q + 1 = k′ − q′. Further m′
1 = k ≥ j + q = j′ − 1 + q′
and for i ≥ 2 we have m′i = mi−1 + 1 ≥ j − 1 + q + 1 = j′ − 1 + q′. For
the expression in (9) we have m′p = mp + 1 for p 6= i and m′
i = mi. Furtherk′ = k + 1 and j′ = j and q = q′. We verify that with these definitionsm′a ≥ ma ≥ j − 1 + q = j′ − 1 + q′. Further 0 ≤ j′ = j ≤ k − q < k′ − q′.
This completes the proof.
There is an obvious corollary to Proposition 2.12.
Corollary 2.13. Let U ⊂ C ⊂ E be a relatively open subset of a partialquadrant in the sc-Banach space E. Assume f : U → RN is a map so thatfor some k and all 0 ≤ ℓ ≤ k the map f : Uℓ → RN is Cℓ+1. Then f is sck.
We explain the usefulness of the previous results by the transversal con-straint construction. This construction will be needed when we build thepolyfolds of Gromov-Witten and SFT. Assume that D is the closed unit diskin C and u : D → RN satisfies u(0) = 0 and Du(0) has a 2-dimensionalimage. Denote by H the orthogonal complement of the image of Du(0).
Then we can find a C1-neighborhood O of u (in C1(D,RN)) and a number
ε ∈ (0, 1) so that O has the following properties.
25

1) If v ∈ O then there exists precisely one point zv with |zv| ≤ ε so thatv(zv) ∈ H .
2) If zv is the point guaranteed by 1), then the image of Dv(zv) and Hare transversal.
The implicit function theorem implies that the map
O → B 12
: v → zv
is of class C1. The map restricted to O∩Cm(D,RN) is of class Cm if m ≥ 1.Denote by E the space H3(D,RN) which we equip with the sc-structure
Em = H3+m(D,RN). Then O := O ∩ E is an open subset of E and in viewof the Sobolev embedding theorem Em → Cm+1. Consequently the mapEm → C : v → zv is of class C1+m. By the previous discussion, i.e. Corollary2.13, we conclude that
Proposition 2.14. The map O → C : v → zv is sc-smooth.
We call this construction the transversal constraint construction.
3 Generalizing Differential Geometry
The amazing fact, which leads to the richness of the theory, is that there aremany sc-smooth maps r : U → U , where U is open in some sc-space (or rel-atively open in a partial quadrant), satisfying r r = r and counter-intuitiveadditional properties. As it will turn out the images of such maps will be ina natural way the local models for a generalized differential geometry. Thereare even local models of finite, but varying dimension.
3.1 New Local Models for Differential Geometry
At this point we are able to introduce the main notion, which will allow usto construct new local models for spaces.
Definition 3.1. Let U be a relatively open subset of a partial quadrantC of a sc-Banach space E. A sc-smooth map r : U → U is called a sc∞-retraction or sc-smooth retraction provided it satisfies r r = r.
26

If r : U → U is a sc∞-retraction then Tr : TU → TU is a sc∞-retraction aswell. This is, of course, a consequence of the chain-rule implying (Tr)(Tr) =Tr. We shall call the image O = r(U) an sc-smooth retract. If we would liketo be more precise and r is defined on a relatively open subset U ⊂ C weshall call O a relative sc-smooth retract.
Here comes the crucial definition of new local models of smooth spaces.
Definition 3.2. A local sc-model is a triple (O,C,E), where E is ansc-Banach space, C a partial quadrant in E, O ⊂ C a subset, so that thereexists a relatively open subset U of C and a sc-smooth retraction r : U → Usatisfying r(U) = O.
If (O,C,E) is a local sc-model and O′ ⊂ O is relatively open then(O′, C, E) is also a local sc-model. Indeed U ′ = r−1(O′) is open in U ′ andtherefore U ′ is relatively open in C. We can take r′ = r|U ′ as the retraction.We need the following lemma.
Lemma 3.3. Assume that (O,C,E) is a local sc-model and that r : U → Uand s : V → V are sc-smooth retractions onto O defined on relatively opensubsets U and V of C. Then the subsets Tr(TU) and Ts(TV ) of TE are thesame.
Proof. If x ∈ O then x = r(x′) for some x′ ∈ U and therefore r(x) =r r(x′) = r(x′) = x. Similarly for s. This implies that s r = r andr s = s.
Assume that (x, h) ∈ Tr(TU). Then x ∈ O1 ⊂ V1. This implies that(x, h) ∈ TV . Write (x, h) = Tr(x′, h′) for some (x′, h′) ∈ TU . Then
Ts(x, h) = (Ts) (Tr)(x′, h′) = T (s r)(x′, h′) = (Tr)(x′, h′) = (x, h).
Consequently, if (x, h) ∈ Tr(TU) then (x, h) ∈ Ts(TV ). Since we can inter-change the order we see that Tr and Ts have the same image.
This allows us to define the tangent TO by Tr(TU). This does not dependon the choice of the sc-smooth retraction. Note that we have a natural mapTO→ O1. Finally we put
T (O,C,E) := (TO, TC, TE).
Here TC = C1 ⊕ E. Observe that Tr : TU → TU is a sc-smooth retractiondefined on the relatively open TU in TC with image TO.
27

Definition 3.4. The tangent T (O,C,E) of the local sc-model (O,C,E)is the local sc-model T (O,C,E) = (TO, TC, TE).
Remark 3.5. Rather than using relatively open subsets of partial quad-rants one might consider relatively open subsets of other convex subsets C(perhaps with suitable additional properties) to enforce certain behavior ofO on its boundary ∂O := O ∩ ∂C.
In order to define sck-maps between local models start with the followinglemma.
Lemma 3.6. Assume that (O,C,E) and (P,D, F ) are local sc-models.Consider a map f : O → P and assume that r : U → U and s : V → Vare sc-smooth retractions associated to O. Then f r : U → F is sck if andonly if this is true for f s : V → F . Moreover T (f r) and T (f s) definethe same maps on TO and the image of this set is contained in TP . Thisrestriction which is independent of the choices is denoted by Tf : TO→ TP .
Proof. Assume that f r : U → F is sck. Then using that s : V → U ∩ V issc∞ we see that f r s : V → F is sck. Observe that f r s(x) = f s(x)showing that f s is sck. Interchanging the role of r and s the result isproved. Define Tf on TO by
Tf(x, h) := T (f r)(x, h) with (x, h) ∈ TO.
The definition does not depend on the choice of r. Indeed
T (f r)(x, h)= T (f r)(Ts)(x, h)= T (f r s)(x, h)= T (f s)(x, h)
Let q : W → W with W relatively open in the partial quadrant Q ⊂ F sothat q(W ) = P and q q = q. We have q f = f . Hence q f r = f rimplying
T (f r)(x, h) = Tq T (f r)(x, h).Hence Tf maps TO into TP . Summarizing, if f r for some retraction issc1, we can can construct the sc0-map Tf : TO → TP .
28

Using the definition of Tf we have T (f r) = (Tf) (Tr). More precisely
Theorem 3.7 (Chain Rule). If (O,C,E), (P,D, F ) and (Q,A,G) arelocal sc-models and f : O → P and g : P → Q are sc1 then g f : O→ Q issc1 and
T (g f) = (Tg) (Tf).
Let us observe that we can take now the definition of a manifold and putit into our more general context. Let X be a paracompact space. An sc-chart(or chart for short) for X is a triple (ϕ, U, (O,C,E)), where (O,C,E) is alocal sc-model and ϕ : U → O a homeomorphism. Let us note the following.
Lemma 3.8. If X is paracompact and for every point x ∈ X there existsa homeomorphism ϕ : U(x) → O, where U(x) is an open neighborhood and(O,C,E) is a suitable local sc-model (depending on x), then X is metrizable.
Proof. Since O ⊂ C ⊂ X we see that O is metrizable. Hence every pointx ∈ X has an open neighborhood which is metrizable, i.e. X is locallymetrizable. Hence by a result of Palais, the space paracompact space Xwhich is locally metrizable is metrizable, see [38].
Given two such triples we can say the two charts are sc-smoothly com-patible provided ϕ′ ϕ−1 is sc-smooth.
Definition 3.9. An sc-smooth atlas for X consists of a collection ofcharts so that the associated open sets U cover X and the transition mapsare all sc-smooth. Two atlases are equivalent if the union is also a sc-smoothatlas. The space X equipped with an equivalence class of sc-smooth atlases iscalled a sc-smooth space.
In general the ”boundary”-structure of a sc-smooth space can be verycomplicated. Indeed, we never required that O as a subset of C lies in asuitable position to C (one should also keep in mind that O will in generalnot be relatively open in C). The spaces occurring in our applications havea much better structure and so it is natural to introduce a subclass of sc-smooth spaces which have a reasonable boundary structure. Before we dothis consider the following special case of sc-smooth spaces.
Consider the collection (O,E) := (O,E,E), where O is a subset of E sothat there exists an open subset U of E and a sc∞-retraction r : U → U with
29

r(U) = O. We call (O,E) a M-polyfold model without boundary.
Definition 3.10. A sc-smooth space modeled on M-polyfold models with-out boundary is called a M-polyfold without boundary.
In Section 3.3 we present a very important example of an M-polyfoldwhich is related to gluing constructions.
Remark 3.11. We refer the reader to Appendix 11.1 for a proof that ifwe use the classical notion of smoothness and consider smooth retractionsr : U → U where U is open in a Banach space then the image r(U) is a split-submanifold. Of course, taking those as new local models does not produceanything new. Hence the fact that the notion of smoothness is relaxed is thesource for the generality of the notion of sc-smooth retraction.
In the next subsection we define a suitable notion of an sc-model withboundary with corners. It is possible to generalize the up-coming discussionby allowing more general boundary structures. We shall not pursue thesepossible generalizations.
3.2 M-Polyfolds with Boundary with Corners
Given a local sc-model (O,C,E) the structure of O∩∂C might be quite wildsince we did not require O to be in a suitable position to ∂C. We define agood subclass as follows.
Definition 3.12. Let U be a relatively open subset of a partial quadrantC in the sc-Banach space E. A sc-smooth retraction r : U → U is calledneat provided the following holds:
1) For every smooth x ∈ O, i.e. x ∈ O∞, the kernel N of Id−Dr(x), hasa sc-complement M contained in C.
2) For every point x ∈ O there exists a sequence of smooth points (xk ∈O∞) with xk → x in O and dC(xk) = dC(x).
To illustrate this, assume that E = R3 and C = [0,∞)2 × R. Thendefine the set O = (a, a, 0) | a ≥ 0. Then O is clearly the image of asmooth retraction r : C → C. But there is no neat retraction. Indeed C
30

only contains one-dimensional linear subspaces. However O = [0,∞)2 × 0is the image of a neat retraction defined on C.
Definition 3.13. A local sc-model (O,C,E) is said to be neat providedO is the image of a sc-smooth, neat retraction r defined on relatively opensubset U of C.
Let (O,C,E) be a neat local sc-model. Then define the degeneracy mapdO : O → N as the restriction of dC to O. The crucial result is the followingtheorem.
Theorem 3.14 (Corner Recognition). Let (O,C,E) and (O′, C ′, E ′) betwo neat local sc-models and f : O → O′ a sc-diffeomorphism. Then
dO(x) = dO′(f(x)) for all x ∈ O.
Proof. We may assume without loss of generality that E = Rn ⊕ W andC = [0,∞)n ⊕W . Similarly E ′ = Rn′ ⊕W ′ and C ′ = [0,∞)n
′ ⊕W ′. Letus first assume x = (a, w) is a smooth point in O. Denote by N the kernelof Id − Dr(x), which is a closed sc-subspace having, by assumption, an sc-complement M contained in 0 ⊕W . Using this assumption we can write
N = (N ∩ (0 ⊕W ))⊕ (q, p) ∈ N | (0, p) ∈M =: N1 ⊕N2.
Then N is the sc-direct sum of two closed sc-subspaces. Let us verify thisstatement. Indeed, if (q, p) ∈ N1 ∩ N2, then q = 0 implying that (0, p) ∈N ∩M = 0, i.e. p = 0. On the other hand given a point (q, p) ∈ N we canwrite (q, 0) in a unique way in the form
(q, 0) = (c, d) + (0, m)
with (c, d) ∈ N and (0, m) ∈ M . This implies that q = c. Consequently(0, m) = (0,−d), i.e. (0, d) ∈M . Hence
(q, p) = (q, d) + (0,−d+ p).
Consequently (0, p−d) ∈ N is the difference of two elements in N . Therefore(q, d) ∈ N2 and (0, p− d) ∈ N1.
Recall that we fixed a smooth x = (a, w). Denote by I the collection of alli ∈ 1, .., n with ai = 0. Denote by Γ the subspace of N consisting of vectors
31

(q, p) ∈ N with qi = 0 for i ∈ I. From the decomposition N = N1⊕N2 we seethat Γ has codimension ♯I in N . The same argument applies to N ′ which isobtained by the same discussion at x′ = f(x). Denote by Γ′ the codimension♯I ′ subspace of N ′ consisting of all vectors (q′, p′) with q′i′ = 0 for i′ ∈ I ′. Letus also note that N and N ′ are precisely the tangent spaces TxO and Tx′O
′.Take any smooth vector (q, p) ∈ Γ. For τ ∈ [0, ε) the points x + τ(q, p)
belong to U∩C, provided ε > 0 is small enough. Hence r(x+τ(q, p)) belongsto O for τ ∈ [0, ε). Then
f(r(x+ τ(q, p))) ∈ O′ for τ ∈ [0, ε).
By assumption the map f r is sc-smooth. This implies that our map
[0, ε)→ E ′m : τ → f(r(x+ τ(q, p)))
is smooth into any level m. Write x′ = (a′, w′) = f(x) and let I ′ be thecollection of indices in 1, ..., n′ with a′i = 0. Let λi′ be the continuouslinear functional on Rn′ ⊕W ′ which associates to (b, y) the number bi′ . Fixi′ ∈ I ′. We have for all τ ∈ (0, ε)
0 ≤ 1
τλi′(f(r(x+ τ(q, p)))).
Using the previously established differentiability properties we find
0 ≤ λi′(1
τ[f(x) + τD(f r)(x)(q, p)) + om(τ)])
= λi′(D(f r)(x)(q, p) +1
τom(τ)).
Taking the limit τ → 0 we find
0 ≤ λi′(D(f r)(x)(q, p))
for all (q, p) ∈ Γ. Replacing (q, p) by −(q, p) we see that
0 = λi′(D(f r)(x)(q, p)
for all i′ ∈ I ′. Since Tf(x) is a linear sc-isomorphism Tf(x)Γ has codimension♯I. Since we proved that Tf(x)Γ ⊂ Γ′ we see that ♯I ′ ≤ ♯I. On the otherhand studying f−1 we obtain the opposite inequality. Hence we concludethat f preserves the degeneracy index for smooth points.
32

Next assume that x ∈ O is on level zero and x′ = f(x). We find since O isneat, a sequence of smooth points (xk) ⊂ O∞ with xk → x in O and d(xk) =d(x). By the previous discussion we know that d(f(xk)) = d(xk) = d(x).Since f(xk) → f(x) it follows immediately that d(f(x)) ≥ d(x). Applyingthe same argument to f−1 shows that we must have equality.
Using neat local sc-models we can define M-polyfolds with boundary withcorners. With other words starting with a paracompact space Z we consideratlases where the local models are neat local sc-models.
Definition 3.15. A sc-smooth space Z build on neat local sc-models iscalled a M-polyfold with boundary with corners.
We note that a M-polyfold with boundary with corners has a naturaldegeneracy index d : Z → N.
Before we discuss an instructive example in the next section we recall auseful concept from [21].
Definition 3.16. Let V ⊂ C ⊂W be a relatively open subset of a partialquadrant in an sc-Banach space W . Assume further that E is a sc-Banachspace and
πv : E → E
is a family of sc-projections parameterized by v ∈ V so that
V ⊕E → E : (v, e)→ πv(e)
is sc-smooth. The triple S = (π,E, V ) is called a sc-smooth splicing.
Given a sc-smooth splicing we can define a sc-smooth map
r : V ⊕ E → V ⊕ E
byr(v, e) = (v, πv(e)).
Clearly r r = r since πv as a projection satisfies πv πv = πv. FurtherV ⊕ E is relatively open in the partial quadrant C ⊕ E in W ⊕ E. Hencer is a sc-smooth retraction. Without loss of generality we may assume thatC = [0,∞)n ⊕W ′.
33

Our first observation is the following. Given any point p := (v, e) ∈ O =r(V ⊕E) let v = (a, w′) ∈ Rn⊕W ′. Then take smooth w′
k in W ′ convergingto w′ and smooth ek converging to e. Hence
pk := ((a, w′k), π(a,w′
k)ek)→ p = ((a, w), e)
and obviously d(pk) = d(p).Assume next that (w, e) ∈ V ⊕E is a smooth point. Consider the kernel
N of Id−Dr(w, e) and pick M = 0⊕ ker(πv). Clearly M ⊂ C⊕E, whereC ⊕E is our partial quadrant. Let us show that
W ⊕E = N ⊕M.
Once this is verified we know that r is neat and consequently (O,C⊕E,W ⊕E) with O = (v, e) | πv(e) = e is a neat sc-model.
The space N consists of all (q, p) with q arbitrary and
(Id− πv)(p) = Dv(πve)q.
Let us observe that the fact that πv is a projection implies that the imageof Dv(πve) (assuming πve = e) is contained in the image of Id − πv. Hencegiven any (q, p) it can be written as the sum
(q, p) = (q,Dv(πve)q) + (0, p−Dv(πve)q) ∈ N ⊕M.
This completes our argument.Given a splicing S = (π,E, V ) as before the associated splicing core KS
is the collection of all points (v, e) with πv(e) = e, v ∈ V . This is, of course,the set r(V ⊕ E), where r is the retraction associated to the splicing. Wecan therefore sum up the previous discussion as
Theorem 3.17. Given a splicing S = (π,E, V ) with V relatively open inthe partial quadrant C in the sc-Banach space W , the triple (KS , C⊕E,W ⊕E) is a neat local sc-model.
All the M-polyfolds occurring in our applications to SFT will be locallymodeled on neat local sc-models arising from splicings.
34

3.3 An Instructive Model Relevant for Gromov-Witten
The following example is very important for Gromov-Witten and symplecticfield theory.
Definition 3.18. A gluing profile is a diffeomorphism ϕ : (0, 1]→ [0,∞)
Two popular examples are the logarithmic gluing profile
r → − 1
2πln(r)
and the exponential gluing profile
r → e1r − e.
They will occur in concrete polyfold constructions as we shall see later. Forthe following denote by ϕ the exponential gluing profile. Given a complexnumber a with 0 < |a| < 1 define R = ϕ(|a|) and ϑ ∈ R/Z =: S1 bya = |a|e−2πiϑ. First we need to carry out a construction with two half-cylinders.
Assume we are given the two standard half-cylinders R±×S1. We denoteby (s, t) and (s′, t′) the coordinates on R+×S1 and R−×S1, respectively. If0 < |a| < 1
2is a gluing parameter we build the infinite cylinder Σa obtained
by taking the disjoint union R+×S1∐
R−×S1 and dividing by the relationthat (s, t) and (s′, t′) are equivalent provided s = s′ + R and t = t′ + ϑand, of course, the coordinates are constrained by (s, t) ∈ R+ × S1 and(s′, t′) ∈ R−× S1. Hence we have the natural embedding [0,∞)× S1 → Σa :(s, t)→ [s, t], where [s, t] is the equivalence class of (s, t). This map extendsto a biholomorphic map (for the obvious conformal structures)
R× S1 → Σa
still denoted by [s, t]. Using the natural embedding (−∞, 0] × S1 → Σa wewrite [s′, t′]′ for the equivalence class of (s′, t′). Again this map extends to abiholomorphic map R× S1 → Σa. Clearly the following relationship holds
[s +R, t+ ϑ] = [s, t]′,
where R = ϕ(|a|) and a = |a| · e−2πiϑ. The cylinder Σa has a finite sub-cylinder (with boundary) Ca consisting of the points having coordinates(s, t) ∈ [0, R]× S1:
Ca = [s, t] | (s, t) ∈ [0, R]× S1 = [s′, t′]′ | (s′, t′) ∈ [−R, 0]× S1.
35

Fix a δ0 ∈ (0,∞) and define a set X as follows:
X = (0 ×G)⋃
⋃
0<|a|< 12
a ×H3(Ca,R2n)
Here G consists of all pairs (η+, η−), where η± : R± × S1 → R2n are mapsso that there exists a constant c ∈ R2n depending on the pairs with η± − chaving partial derivatives up to order three which weighted by eδ0|s| belongto L2(R± × S1,R2n). Hence X as a set depends on the choice of δ0. In thefollowing the constant c will be referred to as the common asymptotic con-stant of (η+, η−). The space X will be equipped with a M-polyfold structurewhich will give an sc-smooth model how maps on cylinders, as the modulusof the cylinder goes to infinity, will decompose into maps on half-cylinders.
Theorem 3.19. Having fixed δ0 the set X = X(δ0) possesses a naturalsecond countable paracompact topology for which the complement of 0×G isopen and dense. Moreover, there exist a natural family F of homeomorphisms
Φ : X → OΦ,
where OΦ is a subset of C⊕G, having the form
Φ(a, u) = (a, φ(a, u))
and the following properties:
1) Taking any strictly monotonic increasing sequence δ = (δm), startingat δ0 and equipping G with the sc-structure where level m correspondsto regularity (m + 3, δm) the image OΨ for every Ψ ∈ F is a localM-polyfold model in C⊕G with the associated sc-structure.
2) Having fixed a choice of δ and the exponential gluing profile the sc-structure on C⊕G, all the transition maps Ψ2 Ψ−1
1 : OΨ1 → OΨ2 forΨ1,Ψ2 ∈ F are sc-smooth.
If δ = (δm) is the increasing sequence, then by the previous theoremX has a natural M-polyfold structure which we denote by X(δ). In theapplications to Gromov-Witten and SFT we need certain homeomorphismsΓ : X → O to be compatible with the sc-smooth structure on O. This will
36

require the sequence δ to satisfy additional properties and will be discussedin later sections.
In order to begin the construction denote by Hm,σc (R± × S1,R2n) the
Hilbert space of functions u : R± × S1 → R2n so that u − c ∈ Hm,σ(R± ×S1,R2n) for a suitable constant c depending on u. Given u we can write itin the form
u = r + c
with r ∈ Hm,σ(R± × S1,R2n). On the latter space we define the norm by
‖r‖m,σ =
∑
|α|≤m
‖ (Dαr)eσ|s| ‖2l2
12
.
The norm on Hm,σc is defined by
‖u‖Hm,σc
=[‖r‖2m,σ + |c|2
] 12
Of interest for us is the sc-Hilbert space G consisting of pairs (η+, η−) so thatη± ∈ H3,δ0
c (R± × S1,R2n) where δ0 > 0 and the asymptotic constants of η±
are matching. The sc-structure is given by defining the pairs on level m tobe of regularity (m+ 3, δm), where δm is a strictly monotonic sequence. Wedefine the norms associated to the scale (Gm) by
‖(η+, η−)‖m =[‖r+‖2m+3,δm + ‖r−‖2m+3,δm + |c|2
] 12 .
Pick a smooth cut-off function β : R→ R satisfying
β(s) = 1 for s ≤ −1
β ′(s) < 0 for s ∈ (−1, 1)
β(s) + β(−s) = 1 for all s.
Let us observe that β(0) = 12. This will be the only choice effecting the
construction of Φ (besides the exponential gluing profile, which in principlecould be replaced by other suitable gluing profiles.).
The main points in the construction of the M-polyfold structure on X aretwo concepts. One is the plus-gluing, the other the minus-gluing. Variantsof the plus-gluing are already well-known as pre-gluing in the gluing-analysisof solutions of elliptic problems, like Taubes’ instanton gluing and Floer’sgluing of broken pseudoholomorphic cylinders, [42, 8].
37

The plus-gluing ⊕a with parameter a produces a H3-map on Ca and theminus-gluing a H3,δ0
c on Σa. The latter space consists of all H3loc-maps u on
Σa, such that there exists a constant c = c(u) ∈ R2n with u([s, t]) − (±c)belonging to H3,δ0(R±×S1,R2n). In order to define these maps we shall usethe coordinates (s, t) rather than (s′, t′), i.e. we use the map Σa → R× S1 :[s, t]→ (s, t), rather than the map [s′, t′]′ → (s′, t′).
Given (η+, η−) ∈ G we define the plus-gluing for a complex number awith |a| < 1
2, denoted by ⊕a(η+, η−), as follows. If a = 0
⊕a(η+, η) = (η+, η−).
For a 6= 0 let R = e1|a| − e and define ϑ ∈ R/Z by a
|a|= e−2πiϑ. Then define
⊕a(η+, η−) : Ca → R2n
by
⊕a(η+, η−)([s, t])
= β(s− R
2)η+(s, t) + (1− β(s− R
2))η−(s−R, t− ϑ)
Clearly⊕a(η+, η−) ∈ H3(Ca,R
2n) for (η+, η−) ∈ G.The minus-gluing is defined by
⊖a(η+, η−) : Σa → R2n
where⊖0(η
+, η−) = 0
and for a 6= 0 with R and ϑ as before
⊖a(η+, η−)([s, t]) = −(1− β(s− R
2))(η+(s, t)− 1
2([η+]R + [η−]−R))
+β(s− R
2)(η−(s−R, t− ϑ)− 1
2([η+]R + [η−]−R)).
Here
[η+]R =
∫
S1
η+(R
2, t)dt and [η−]−R =
∫
S1
η−(−R2, t)dt.
38

If a 6= 0 then ⊕a(η+, η−) belongs to H3(Ca,R2n). We observe that
⊖a(η+, η−) = ⊖a(r+, r−)
writing η± = c + r±, where c is the asymptotic constant. Moreover ass → ±∞ we see that ⊖a(η+, η−)([s, t]) tends to ±1
2([r+]R + [r−]−R). Hence
⊖a(η+, η−) has antipodal asymptotic constants. The convergence to theseconstants is of the obvious exponential form. Hence the minus-gluing be-longs to H3,δ0
c (Σa,R2n).
⊖a(η+, η−) ∈ H3,δ0c (Σa,R
2n) for (η+, η−) ∈ G.
We equip the space H3,δ0c (Σa,R
2n with the sc-structure, where level m corre-sponds to regularity (m+ 3, δm).
Let us define for a the Banach spaces Ga as follows. We put G0 = G =G⊕ 0 and for a 6= 0 we put
Ga = H3(Ca,R2n)⊕H3,δ0
c (Σa,R2n).
Then defineY =
⋃
|a|< 12
a ×Ga.
We view it as some kind of bundle over B 12
= a | |a| < 12. On the other
hand we have the product bundle B 12×G. Define
Γ : B 12×G→ Y
by(a, η+, η−)→ (a,⊕a(η+, η−),⊖a(η−, η+)).
We first show that this is a fiber-wise linear topological isomorphism. It isclear that this is a fiber-wise bounded linear operator. We are done if we canshow that for given (a, w, p) in the target there is a unique (a, η+, η−) whichis mapped to it. Indeed in this case the open mapping theorem tells us thatwe have fiber-wise a linear topological isomorphism.
We start with the equation
⊕a(η+, η−) = w,
39

where w ∈ H3(Ca,R2n). If we integrate w over the circle at s = R
2and use
that β(0) = 12
we find∫
S1
w([R
2, t])dt =
1
2
[∫
S1
η+(R
2, t)dt+ η−(−R
2, t)dt
]=
1
2
([η+]R + [η−]−R
).
We abbreviate [w] :=∫S1 w([R
2, t])dt and write η± = d + r±. Then we can
rewrite the above as
[w] = d+1
2([r+]R + [r−]−R). (10)
If c is the asymptotic constant of p at +∞ we see from p = ⊖a(η+, η−) =⊖a(r+, r−) that the identity
1
2([r+]R + [r−]−R) = c (11)
holds. Combining (10) and (11) we obtain
[w] = d+ c.
We can rewrite the system
⊕a(η+, η−) = w and ⊖a (η+, η−) = p.
using the above information as
⊕a(r+, r−) = w − [w] + c
and
−(1− β(s− R2)) · r+(s, t) + β(1− R
2) · r+(s−R, t− ϑ) =
p([s, t])− (1− β(s− R2))c+ β(s− R
2)c.
Observe that right-hand side is produced from the data (w, p) by computing[w] and c. Let us introduce the abbreviations w and p by
w([s, t]) = w([s, t])− [w] + c
p([s, t]) = p([s, t])− (1− β(s− R2))c+ β(s− R
2)c.
We note that w ∈ H3(Ca,R2n) and p ∈ H3,δ0(Σa,R
2n). In order to simplify
the formulas further, we introduce β(s) := β(s− R2). Our system of equations
can be rewritten as[
β 1− β−(1− β) β
]·[
r+
r−(s− R, t− ϑ)
]=
[wp
].
40

We just have to invert the matrix and then shift the argument of r−. Weabbreviate γ = β2 + (1 − β)2 and γ := β2 + (1 − β)2. Then we can rewritethe above as
[r+
r−(s−R, t− ϑ)
]=
1
γ·[
β −(1− β)
1− β β
]·[wp
].
This gives the formula
r+(s, t) = βγ(s− R
2)w([s, t])− 1−β
γ(s− R
2)p([s, t])
and there is a similar formula for r−. Let us observe that r± belong to theSobolev space H3,δ0(R± × S1,R2n). Hence the associated η± defined by
η± = r± + d = r± + [w]− c
gives a pair (η+, η−) ∈ G. This proves that the map Γ is fiber-wise a linearbijection. Given a fixed a 6= 0 the natural decomposition of Ga
Ga = H3(Ca,R2n)⊕H3,δ0
c (Σa,R2n)
defines the topological direct sum decomposition of G
G = ker(⊖a)⊕ ker(⊕a).
For a = 0 we have G = G⊕ 0 since ⊕0 is defined as the identity map and⊖0 as the zero-map. Associated we have the continuous projection operator
πa : G→ G
which projects onto ker(⊖a) along ker(⊕a). Since πa is a projection we musthave πa πa = πa.
Remark 3.20. It is important to realize that the map a → πa is not(!)continuous as a map B 1
2→ L(G), where the latter is equipped with its usual
Banach space topology. Indeed, if it were, the continuity at a = 0 wouldimply by the openness of invertible operators in L(G) that πa is invertiblefor |a| small. However, ker(πa) = ker(⊕a) is obviously nontrivial for a 6= 0.On the other hand, if we equip L(G) with the compact open topology themap a → πa is continuous. Moreover, as we shall see soon, the family ofprojections has an associated sc-smooth retraction.
41

Associate to the family a→ πa the map
r : B 12⊕G→ B 1
2⊕G : r(a, (η+, η−)) = (a, πa(η
+, η−)).
Then r r = r and let O be the image of r.
O = r(B 12⊕G) ⊂ C⊕G.
Trivially, since we annihilated the kernel of the plus-gluing,
O → X : (a, (η+, η−))→ (a,⊕a(η+, η−))
is a bijection. The inverse is our promised map Φ. We shall show that(O,C ⊕ G) is a sc-model for various sc-structures on G. In fact we shallprove the following theorem.
Theorem 3.21. Consider for the previously constructed family B 12→
L(G) : a→ πa the associated retraction
r : B 12⊕G→ B 1
2⊕G : r(a, η+, η−) = (a, πa(η
+, η−))
Then given strictly increasing sequence δ = (δm) starting with δ0 the map r issc-smooth if we equip C⊕G with the sc-structure, where level m correspondsto regularity (m + 3, δm). Hence O = r(B 1
2⊕ G) is a sc-smooth retract in
C⊕G and therefore (O,C⊕G) a local sc-model.
Let us note that S = (π,G,B 12) is a sc-smooth splicing.
In order to prove the theorem we need a formula for πa. If a = 0 thisprojection is the identity since ⊖a was the zero-map. So assume 0 < |a| < 1
2.
Then (η+, η−) := πa(ξ+, ξ−) can be obtained by solving the following system
⊕a(η+, η−) = ⊕a(ξ+, ξ−)
⊖a(η+, η−) = 0.
Using our previous solution formula we obtain with w = ⊕a(ξ+, ξ−) andp = 0, implying that c = 0
η+ = [w] +β
γ(s− R
2)(⊕a(ξ+, ξ−)([s, t])− [w]).
42

We compute with [w] = 12([ξ+]R + [ξ−]−R)
η+(s, t) =
(1− β
γ(s− R
2)
)· 12· ([ξ+]R + [ξ−]−R)
+β2
γ(s− R
2)ξ+(s, t) +
β(1− β)
γ(s− R
2)ξ−(s−R, t− ϑ).
If we write ξ± = c + r±, where c is the common asymptotic constant weobtain
η+(s, t) =
(1− β
γ(s− R
2)
)· 12· ([r+]R + [r−]−R)
+β2
γ(s− R
2)r+(s, t) +
β(1− β)
γ(s− R
2)r−(s− R, t− ϑ)
+
(1− β
γ+β2
γ+β(1− β)
γ
)(s− R
2) · c
The last line simplifies since
1− βγ
+ β2
γ+ β(1−β)
γ= 1.
Hence we obtain the formula
η+ = c+
(1− β
γ(s− R
2)
)· 12([r+]R + [r−]−R) (12)
+β2
γ(s− R
2)r+(s, t) +
β(1− β)
γ(s− R
2)r−(s−R, t− ϑ).
We need to study the sc-smooth properties of the map (ξ+, ξ−)→ η+. Sincethe construction is symmetric the same will be true for of η−. The definingexpression for η+ given by (12) is the sum of several terms which we shallstudy independently. Therefore we shall study separately the following maps:
1) The map H3,δ0c (R+ × S1,R2n) → R2n : ξ+ → c which associates to ξ+
the asymptotic constant.
2) The map B 12× H3,δ0(R+ × S1,R2n) → R2n: (a, r+) →
∫S1 r
+(R2, t)dt.
(The result for r− is a consequence.)
43

3) The map B 12×H3,δ0(R+×S1,R2n)→ H3,δ0(R+×S1,R2n) which asso-
ciates to (a, r+) the map [(s, t)→ βγ(s− R
2)[r+]R].
4) The map B 12⊕H3,δ0(R+ × S1,R2n)→ H3,δ0(R+ × S1,R2n) : (a, r+)→
[(s, t)→ β2
γ(s− R
2)r+(s, t)].
5) The map (B 12⊕H3,δ0(R−×S1,R2n)→ H3,δ0(R+×S1,R2n) : (a, r−)→
[(s, t)→ β(1−β)γ
(s− R2)r−(s− R, t− ϑ)].
The sc-smoothness of the map (a, (ξ+, ξ−))→ πa(η+, η−) is a consequence
of the following proposition.
Proposition 3.22. The maps listed above 1)-5) are sc-smooth.
The statement 1) is rather trivial, the statements 2) and 4) are nontrivialand 3) and 5) are not only nontrivial but also subtle.
Part of the proof is contained in Appendix 11.3. However, we will provesome general result in the next Subsection 3.4 which will imply points 4) and5). Though the proof is somewhat tedious it can serve as a general modelhow to approach such concrete sc-smoothness questions.
Assuming that Proposition 3.22 has been proved, the proof of Theorem3.21 is complete. At this point we have then constructed (by making thechoice of β) a bijection
Φ : X → OΦ,
where O is a subset of B 12⊕G, so that for every increasing sequence δ starting
with δ0 and associated sc-structure on C⊕G the pair (OΦ,C⊕G) is a localsc-model. The subset OΦ of C⊕G is defined by (a, (η+, η−)) with |a| < 1
2and
πa(η+, η−) = (η+, η−). Since C⊕G is second countable and metric the same
is true for the subset. In particular OΦ is second countable and paracompact.Continuing the discussion we complete the proof of Theorem 3.19. Assumewe have constructed another Ψ : X → OΨ. We want to understand thetransition map Φ Ψ−1. Let us denote in the second example the choice ofthe ”β-function” by σ. It leads to a different gluing denoted by ⊕′
a. Usingthe definition of a smooth map between local sc-models we need to show thatthe map
B 12⊕G→ B 1
2⊕G : (a, ξ+, ξ−)→ (a, η+, η−)
44

defined via
⊕a(η+, η−) = ⊕′a(ξ
+, ξ−) and ⊖a (η+, η−) = 0
is sc-smooth. Let us write w = ⊕′a(ξ
+, ξ−) and ξ± = c + r±, where c is thecommon asymptotic constant. We note that
[w] = c+1
2· ([r+]R + [r−]−R).
η+(s, t) = [w] +β
γ(s− R
2) (w([s, t])− [w])
= c+ (1− β
γ(s− R
2)) · 1
2([r+]R + [r−]−R)
+βσ
γ(s− R
2)r+(s, t) +
β(1− σ)
γ(s− R
2)r−(s− R, t− ϑ)
In order to obtain sc-smoothness for the transition map ΦΨ−1 it suffices toshow the sc-smoothness of the map
(a, ξ+, ξ−)→ (η+, η−).
For symmetry reasons it suffices to show sc-smoothness for (a, ξ+, ξ−)→ η+.In view of the previous discussion and the results in Proposition 3.22 it issufficient to understand the sc-smoothness of the following expressions. Thefirst one is
(a, r+)→ [(s, t)→ βσ
γ(s− R
2)r+(s, t)] (13)
and
(a, r−)→ [(s, t)→ β(1− σ)
γ(s− R
2)r−(s− R, t− ϑ)] (14)
We have the following result which will be a consequence of a result provedin the next Subsection 3.4.
Proposition 3.23. The maps defined in (13) and (14) are sc-smooth.
45

As a consequence of the previous discussion the proof of Theorem 3.19 iscomplete.
For our applications, namely once we construct bundles over the polyfoldof stable maps, we need some variation of the previous splicing construction.Consider the space F of pairs (ξ+, ξ−) with ξ± ∈ H2,δ0(R± × S1,R2n). Wedefine a sc-structure where level m corresponds to regularity (m + 2, δm).Here δ is the previously used increasing sequence. We define gluing as beforebut denote it by ⊕a. Observe that the levels here are different then in theprevious example. We define the hat-plus-gluing
⊕a(ξ+, ξ−) : Ca → R2n
by
⊕a(ξ+, ξ−)([s, t]) = β(s− R
2)ξ(s, t) + (1− β(s− R
2))ξ−(s− R, t− ϑ).
For the anti-gluing⊖a : Σa → R2n
we use a different formula, namely
⊖a([s, t]) = −(1− β(s− R
2))ξ+(s, t) + β(s− R
2)ξ−(s− R, t− ϑ).
The gluing parameter lies in B 12. Using precisely the same discussion as
before (in fact one does not need all the sub-cases) one constructs a familyof projections πa : F → F , where the image is ker(⊖a). Then
Theorem 3.24. The triple S = (π, F, B 12) is a sc-smooth splicing.
The proof of this theorem is an easy consequence of the results in thenext subsection.
3.4 A Basic Sc-Smoothness Proposition
The following proposition states the sc-smoothness for two types of mapsand has many applications. Of course, these type of results can be extendedto other dimensions and other Sobolev spaces. We just prove this particularcase since it covers our applications. Again let δm be an increasing sequencewith 0 < δ0 < δ1 < ... For a nonzero complex number we define ϑ by
46

a = |a| · e−2πiϑ. With this definition and putting R = − 12π· ln(|a|) we see
that[0,∞)× S1 → D \ 0 : (R, ϑ)→ e−2π(R+iϑ),
i.e. holomorphic polar coordinates around 0 on the closed unit disk definesthe correspondence
(R, ϑ) ! a
This correspondence is associated to the logarithmic gluing profile. With ourdifferent choice of gluing profile, i.e. the exponential gluing profile we deformthe latter relationship where now
R = ϕ(|a|)
and ϑ stays as before.
Proposition 3.25. Let E = H3,δ0(R× S1,RN) be equipped with the sc-structure where level m corresponds to regularity (m + 3, δm). Using theexponential gluing profile ϕ put R = ϕ(|a|) for 0 < |a| < 1
2. Then the
following two mapsΓi : B 1
2⊕ E → E, i = 1, 2
are sc-smooth.(a) Let f1 : R→ R be a smooth map which is constant outside of a compactinterval so that f1(+∞) = 0. Define
Γ1(a, h)(s) = f1(s−R
2)h(s, t)
for a 6= 0 and Γ1(0, h) = f(−∞)h.(b) Let f2 : R→ R be a compactly supported smooth map and define Γ2(0, h) =0 and
Γ2(a, h) = f2(s−R
2)h(s− R, t− ϑ).
The key point in the proof is the following. The gluing length R as wellas the gluing angle ϑ are functions of the gluing parameter a. As long asa 6= 0 these functions are smooth. However, as a → 0 their derivativesblow-up. In order to achieve sc-smoothness as stated in Proposition 3.25 itis important that the other terms occurring in the formulae have a sufficientdecay. There the assumption on exponential decays, as well as the filtrationby levels comes in. We split the proofs into different parts.
47

Lemma 3.26. The maps Γ1 and Γ2 are sc0.
Proof. Since the shift operator is sc0 the only difficulty can arise at a = 0. Webegin with Γ1. Let us assume without loss of generality that f1(−∞) = 1. Fixa level m and observe that for a suitable constant C > 0 we have uniformlyfor |a| < 1
2that
‖ Γ1(a, h) ‖m≤ C ·[
sup0≤k≤m
sups∈R
|dkf(s)|]· ‖ h ‖m .
Next recall that smooth compactly supported maps are dense in Em forevery m. Pick such a smooth compactly supported u0. If |a| is small enoughΓ1(a, u0) = u0. Given h0 and ε > 0 pick a smooth compactly supported u0
with ‖ u0 − h0 ‖m≤ ε. Then, for a suitable constant C only depending on fand m and |a| small enough:
‖ Γ1(a, h)− Γ1(0, h0) ‖m= ‖ Γ1(a, h)− h0 ‖m= ‖ (Γ1(a, u0)− u0) + (u0 − h0) + Γ1(a, h0 − u0) + Γ1(a, h− h0) ‖m≤ ‖ Γ1(a, u0)− u0 ‖m + ‖ u0 − h0 ‖m +C· ‖ u0 − h0 ‖m +C· ‖ h− h0 ‖m
If |a| is small enough and h close enough to h0 we conclude that
‖ Γ1(a, h)− Γ1(0, h0) ‖m≤ 2 · (C + 1) · ε.
The sc0-continuity for Γ2 is somewhat more involved. Again the difficulty isat a = 0. If u0 is a smooth compactly supported map and a is close to 0 wehave Γ2(a, u0) = 0. Using the density of smooth compactly supported mapson level m it suffices, using the same idea as before, to show that the normof Γ2(a, ·) : Em → Em is uniformly bounded with respect to a (near 0). Thesupport of f2 belongs to [−A,A] for a suitable A > 0 by assumption. Takea so small that [−A − R
2, A− R
2] ⊂ (−∞, 0] and [−A + R
2, A + R
2] ⊂ [0,∞),
respectively. We estimate for a h ∈ Em and |a| small enough for a suitableconstant C > 0 independent of a and h:
48

‖ Γ2(a, h) ‖2m (15)
=∑
|α|≤m
∫
[−A+ R2,A+ R
2]×S1
|Dα(f(s− R
2)h(s− R, t− ϑ))|2 · e2δm|s|dsdt
≤ C2 ·∑
|α|≤m
∫
[−A+ R2,A+ R
2]×S1
|(Dαh)(s− R, t− ϑ)|2 · e2δmsdsdt
= C2 ·∑
|α|≤m
∫
[−A−R2,A−R
2]×S1
|(Dαh)(s, t)|2 · e2δm(s+R)dsdt
= C2 ·∑
|α|≤m
∫
[−A−R2,A−R
2]×S1
|(Dαh)(s, t)|2 · e2δm(−s+2s+R)dsdt
≤ C2· ‖ h ‖2m ·e4δmA.
This gives us the estimate
‖ Γ2(a, h) ‖m≤ C· ‖ h ‖m ·e2δmA.
Hence
‖ Γ2(a, u) ‖m≤‖ Γ2(a, h0) ‖m + ‖ Γ2(a, u0 − h0) ‖m + ‖ Γ2(a, u− u0) ‖m,
which implies for a suitable constant C > 0 independent of a and a compactlysupported smooth h0 with ‖ u0 − h0 ‖m< ε provided a is small enough
‖ Γ2(a, u) ‖m≤ C · ε+ C· ‖ u− u0 ‖mThis implies sc0-continuity at points with a = 0
Next we derive some decay estimates.
Lemma 3.27. If m, k ≥ 0 set dm+k,m = 12(δm+k − δm). Then there exists
a constant C = C(m, k) > 0 independent of h and a so that the followingholds
‖ h− Γ1(a, h) ‖m≤ C · e−dm+k,m·R· ‖ h ‖m+k
‖ Γ2(a, h) ‖m≤ C · e−dm+k,m·R· ‖ h ‖m+k
for all h ∈ Em+k, where R = ϕ(|a|).
49

Proof. We begin with the map Γ1. Again we assume without loss of generalitythat f1(−∞) = 1. Defining f = 1 − f1 the map f satisfies f(s) = 0 for alls << 0 and f(+∞) = 1. Instead of Γ1 we study Γ(a, h) = h−Γ1(a, h) whichis defined by
Γ(a, h)(s, t) = f(s− R
2)h(s, t).
We estimate with a suitable constant C and D independent of a and h ∈Em+k using that the support of f(s − R
2) is contained in [R
2− A,∞) for a
suitable A > 0 (assuming a is small enough so that the support is containedin [0,∞)):
‖ Γ(a, h) ‖2m≤
∑
|α|≤m
∫
R×S1
|(Dα(f(s− R
2)h(s, t)))eδm|s||2dstdt
=∑
|α|≤m
∫
R×S1
|(Dα(f(s− R
2)h(s, t)))eδms|2dstdt
≤ D2 ·∑
|α|≤m
∫
[ R2−A,∞)×S1
|(Dαh(s, t))eδm+ks−2dm+k,ms|2dsdt
≤ C2 ·∑
|α|≤m
·e−2·dm+k,mR
∫
[ R2−A,∞)×S1
|(Dαh(s, t))eδm+ks|2dsdt
Hence we conclude for sufficiently small a and h ∈ Em+k.
‖ Γ(a, h) ‖m≤ C · e−dm+k,mR· ‖ h ‖m+k .
This is precisely the required result.Next we consider Γ2. The support of f2 is contained in some [−A,A].
Consequently, the support of (s, t) → f2(s − R2)h(s − R, t − ϑ) is contained
in [−A + R2, A + R
2]× S1. If a is small enough −A + R
2≥ 0 and A− R
2≤ 0,
respectively. Now we compute assuming a is small enough:
50

‖ Γ2(a, h) ‖2m=
∑
|α|≤m
∫
[−A+ R2,A+ R
2]×S1
|Dα(f2(s−R
2)h(s− R, t− ϑ))eδm|s||2dsdt
=∑
|α|≤m
∫
[−A+ R2,A+ R
2]×S1
|Dα(f2(s−R
2)h(s− R, t− ϑ))eδms|2dsdt
≤ C2 ·∑
|α|≤m
∫
[−A+ R2,A+ R
2]×S1
|(Dαh)(s−R, t− ϑ))eδms|2dsdt
= C2 ·∑
|α|≤m
∫
[−A−R2,A−R
2]×S1
|(Dαh)(s, t)eδm(s+R)|2dsdt
= C2 ·∑
|α|≤m
∫
[−A−R2,A−R
2]×S1
|(Dαh)(s, t)e−δm+ks+(δm+δm+k)s+δmR)|2dsdt
≤ C2 ‖ h ‖2m+k ·(e2δmR · e2(δm+δm+k)(A−R
2))
≤ D2 ‖ h ‖2m+k ·e−2dm+kR.
Here D is a constant independent of small a and h ∈ Em+k.
As a consequence of the sc-smoothness of the shift-map we see immedi-ately that the following holds.
Lemma 3.28. The maps R2⊕E → E defined by (R, u)→ f1(·− R2)u and
(R, v)→ f2(s− R2)v(s− R, t− ϑ) are sc-smooth.
We need estimates for the derivative of the functions a → R(a), where
R = e1|a| − e and a → ϑ(a), where a = |a| · e−2πiϑ. As a consequence of
Lemma 11.1 proved in Appendix 11.2, we have the following estimates:
Proposition 3.29. For every multi-index α there exists a constant Csuch that
|DαR(a)| ≤ C · R(a) · [ln(R(a))]2|α|
for 0 < |a| < 12.
Let us continue with the study of the map
Γ1 : B 12⊕E → E : Γ(a, u)(s, t) = f1(s−
R
2)u(s, t).
51

As already done before we assume that f1(−∞) = 1 and study rather thanΓ1 the map Γ(a, u) = u−Γ1(a, u) which can be obtained with f = 1− f1 viathe formula
Γ(a, u)(s, t) = f(s− R
2)u(s, t).
Let us denote by R(a), for a 6= 0, any expression of the kind
R(a)(a1, ..., ak) = (Dk1R)(a)(a1, .., ak1) · .. · (DkℓR)(a)(akℓ−1+1, .., ak1+..+kℓ).
We call k = k1 + ..+ kℓ the order of R(a). We define the R(a) of order 0 tobe the constant 1-function.
In order to prove the sc-smoothness of Γ we need a structural statementabout the form of T kΓ as long as a 6= 0. Such statements are usually bestproved by induction.
Lemma 3.30. Assume that π : T kE → Ej is the projection onto a factor.Then for a 6= 0 the composition πT kΓ is a linear combination of expressionsof the form
A : (B 12\ 0)⊕ Cp ⊕ Em → Ej : (16)
(a, h1, .., hp, w)→ [(s, t)→ R(a)(h) · f (p)(s− R2)w(s, t)],
where R(a) has order p and the following inequalities hold
p ≤ m− j and p ≤ k.
Proof. We prove this by induction with respect to k starting with k = 0. Ifk = 0 with R(a) = 1, p = 0, and m = j = 0 the assertion is trivial. Assumeit holds for k. We show that it must hold for k + 1. If π : T k+1E → Ej
is a projection onto one of the first 2k factors we know that terms have therequired form by induction hypothesis. The only thing which is different isthat the indices m and j are both lifted by one (recall the definition of thetangent). If π projects onto one of the last 2k factors the terms which wesee are the linear combinations of derivatives of expressions guaranteed bythe induction hypothesis. Hence take an expression of the form (16) and sc-differentiate. We obtain for (a, h, w, δa, δh, δw) ∈ T ((B 1
2\0)⊕Cp⊕Em) =
(B 12\ 0)⊕Cp⊕Em+1⊕C⊕Cp⊕Em a linear combination of terms of the
following kind.
B 12⊕Cp+1 ⊕ Em+1 → Ej : (a, (δa, h), w)→ R′(a)(δa, h)f (p)(s− R
2)w,
52

where all the occurring R′(a) have order p′ = p + 1. Here m′ = m + 1 andj′ = j so that p′ ≤ m′ − j′. Then we have terms of the form
B 12⊕ Cp ⊕Em+1 → Ej : (a, (h1, ..δhi, ..hp), w)→ A(a, (h1, ..δhi, ..hp), w).
Here p′ = p, m′ = m+ 1 and j′ = j. Then we have
B 12⊕Cp+1 ⊕ Em+1 → Ej : (a, (δa, h), w)→ R′(a)(δa, h) · f (p+1)(s− R
2)w.
Here p′ = p+ 1 and R′(a) has order p+ 1. Moreover m′ = m+ 1 and j′ = j.Finally we have
B 12⊕Cp ⊕ Em → Ej : (a, h, δw)→ A(a, h, δw).
Here j′ = j, m′ = m and p′ = p. This completes the proof of the lemma.
Let us observe that any expression A as above has a continuous extensionto points (0, h, w) by defining A(0, h, w) = 0. Indeed, if m = j so that p = 0we have A(a, w) = Γ(a, w) as a map B 1
2⊕ Em → Em and we already know
that this is sc0. Hence, assume that m − j > 0. Then we combine theestimates in Lemmata 3.27 and 3.29. This gives for a suitable constant Cdepending on m, j and p, but not on a small
‖ A(a, h, w) ‖j≤ C · e−dm,jR ‖ w ‖m ·R3p · |h|p.
This clearly converges to 0 as a→ 0 if (h, w) are uniformly bounded. At thispoint we have proved the following
Lemma 3.31. The map Γ : (B 12\ 0)⊕ E → E is sc-smooth. Moreover
its iterated tangent T kΓ can be extended continuously by 0 over all pointswith a = 0.
What remains to be done is to show the approximation property at pointswith a = 0. Of course, the candidate is always the vanishing linear map. Fixany k. We have to consider
1
‖ (a,H) ‖1· ‖ T kΓ(a,H) ‖0 .
53

Since we know that the expressions π T kΓ are of the particular form itsuffices to consider
1
|a|+ |h|+ ‖ w ‖m+1
‖ A(a, h, w) ‖j .
Using a previous estimate the above expression can be estimated from above,while |a|+ |h|+ ‖ w ‖m+1→ 0, by
C · e−dm+1,jR · ‖ w ‖m+1
‖ w ‖m+1Rp+1,
which converges to 0. This proves the approximation property. At this pointwe have completed the proof that Γ1 is sc-smooth.
Next we consider Γ2. Again we prove a structural result about π T kΓ2
first. Before we do that let us note an estimate which we shall subsequentlyuse. It follows immediately from Lemma 11.2.
Proposition 3.32. For all multi-indices α there exists a constant C > 0so that for a 6= 0 we have
|Dαϑ(a)| ≤ C · |[ln(R(a))]|α|.
Denote by Θ(a) (similarly as R(a)) an expression of the form
Θ(a)(h1, .., hk) = Dk1ϑ(a)(h1, .., hk1) · .. ·Dkℓϑ(hkℓ−1+1, .., hk),
where k = k1 + ...+kℓ. As a consequence of the previous proposition we havethe following estimate for small a 6= 0 and a suitable constant C > 0:
|Θ(a)(h1, .., hk)| ≤ C · [ln(R)]k.
Next we prove inductively the necessary structural statement.
Lemma 3.33. Assume that π : T kE → Ej is the projection onto a factor.Then for a 6= 0 the composition πT kΓ2 is a linear combination of expressionsof the form
A : (B 12\ 0)⊕Cp+α1 ⊕Cα2 ⊕Em → Ej
(a, h, e, w)→ [(s, t)→ R(a)(h) ·Θ(a)(e) · f (p)(s− R2)(Dαw)(s− R, t− ϑ)],
where p + |α| ≤ m− j and |p|+ |α| ≤ k. Moreover the sum of the orders ofR(a) and Θ(a) does not exceed k.
54

Proof. Clearly the statement is true for k = 0. Assume it has been provedfor k. If we consider π T k+1Γ2, where π projects onto one of the first 2k
factors, the result follows from the induction hypothesis raising the indices indomain and target by one. If π projects onto one of the last 2k factors, thenπT k+1Γ2 is the linear combination of derivatives of terms guaranteed by theinduction hypothesis. More precisely, assume that we consider an expressionA of the form as described in Lemma 3.33. If we differentiate at a point witha 6= 0 it is a linear combination of the following type of expressions. Firstly
(B 12\ 0)⊕ C1+p+α1 ⊕Cα2 ⊕ Em+1 → Ej :
(a, (δa, h), e, w)→ R′(a)(δa, h) ·Θ(a)(e) · f (p)(s− R2)(Dαw)(s− R, t− ϑ)
Here R′(a) is a linear combination of terms of the form R(a) of order p +(α1 + 1). Hence this particular derivative is a finite linear combination ofterms of the described form. Denoting the new indices by primed letters wehave m′ = m + 1, α′
1 = α1, α′2 = α2, j = j′ and p′ = p and k′ = k + 1.
Obviously the sum of the orders of the occurring R(a) and Θ(a) is increasedby one and does not exceed k′ = k + 1.
The second type of expression is obtained by only differentiating R(a)(h)with respect to h. This also gives a linear combination of the required form.
The third type and fourth type comes from differentiating Θ(a)(e) eitherwith respect to a or only e. This is quite similar to the two previous cases.In this case we have m′ = m + 1, α′ = α and k′ = k + 1, p′ = p and againthe sum of the orders of the R(a) and Θ(a) is increased by one and thereforedoes not exceed k + 1.
The fifth type comes from differentiating f (p)(s− R(a)2
) with respect to a.In this case p′ = p + 1 and α′
1 = α1 + 1. The derivative of R(a) gives withR(a) a new term R′(a) but of one order higher. Again this has the requiredform.
If we differentiate with respect to w we have to replace this argument byδw, but with δw ∈ Em. In this case all the indices remain the same andtherefore the inequalities between them stay the same.
Finally we have the terms which we obtain by differentiating (Dαw)(s−R, t − ϑ) with respect to a. Differentiating the latter gives the two terms−(Dα+(1,0)w)(s−R, t−ϑ)DR(a)(δa) and −Dα+(0,1)w)(s−R, t−ϑ)Dϑ(a)(δ).Of course multiplied by R(a)(h) ·Θ(a) ·f (p)(s− R
2) gives terms of the required
form.
55

Using the previous lemma and the previously derived exponential decayestimates we see that every T kΓ2 can be extended in a sc0-continuous wayby 0 over points with a = 0. Arguing as before (just after Lemma 3.31) wecan also show the approximation property.
4 Polyfolds and Examples
In this section we introduce the notion of a polyfold. A polyfold is a paracom-pact space Z equipped with an equivalence class of polyfold structures. Theexistence of a polyfold structure implies that Z is locally metrizable, whichin turn with the paracompactness implies global metrizability. A polyfoldstructure is given by a homeomorphism between Z and the orbit space of aproper etale polyfold groupoid. The latter can be viewed as a generalizationof an etale proper Lie groupoid to the polyfold world. An etale proper Liegroupoid can be viewed for our purposes as a generalization of a smooth atlasin which additional local symmetries are encoded, see [17, 37].
It is useful to start with an example. The example we chose will lead tothe main polyfold construction in Gromov-Witten theory.
4.1 The Space of Stable Maps as a Motivation
Let (Q,ω) be a symplectic manifold where ∂Q = ∅ for simplicity. We con-sider maps defined on Riemann surfaces with images in (Q,ω) having variousregularity properties. We shall write
u : O(S, x)→ Q
for a germ around x ∈ S of map defined on (a piece) of Riemann surface S.
Definition 4.1. Let m ≥ 2 be an integer and ε > 0. We say a germof continuous map u : O(S, x) → Q is of class (m, ε) at the point x if for asmooth chart φ : U(u(0)) → R2n mapping u(0) to 0 and holomorphic polarcoordinates σ : [0,∞)× S1 → S \ x around x, the map
v(s, t) = φ u σ(s, t)
which is defined for s large, has partial derivatives up to order m, whichweighted by eεs belong to L2([s0,∞)× S1,R2n) if s0 is sufficiently large. Wesay the germ is of class m around a point z ∈ S provided u is of class Hm
loc
near z.
56

One easily verifies that if σ is a germ of biholomorphic map mappingx ∈ S to y ∈ S ′ then u is of class (m, ε) near x if and only if the sameis true for u σ−1 near y. Moreover we observe that the above definitiondoes not depend on the choices involved, like charts and holomorphic polarcoordinates.
We consider now tuples α = (S, j,M,D, u), where (S, j,M,D) is a nodedRiemann surface with ordered marked points and u : S →W is a continuousmap.
Definition 4.2. A noded Riemann surface with marked points is a tuple(S, j,M,D), where (S, j) is a closed Riemann surface, M ⊂ S a finite collec-tion of ordered marked points, and D is a finite collection of un-ordered pairsx, y of points in S, called nodal pairs, so that x 6= y and two pairs whichintersect are identical. The union of all x, y, denoted by |D| is disjointfrom M . We call D the set of nodal pairs and |D| the set of nodal points.
The Riemann surface S might consist of different connected componentsC. We call C a domain component of S. The special points on C are thepoints in C ∩ (M ∪ |D|). We say that (S, j,M,D) is connected providedthe topological space S obtained by identifying x = y for x, y ∈ D isconnected. So it is with our terminology possible that on the one hand(S, j,M,D) might be connected, but S on the other hand may have severalconnected components, i.e. its domain components.
Next we describe the tuples α in more detail.
Definition 4.3. We say that α = (S, j,M,D, u) is of class (m, δ) pro-vided the following holds, here m ≥ 2 and δ > 0.
0) The underlying topological space obtained by identifying the two pointsin any nodal pair is connected. (This requirement is not crucial.)
1) The map u is around the points in |D| of class (m, δ). It is around allother points of class m. (For certain applications it is useful to requirethe map u around the points in M to be of class (m, δ) as well. This,however requires only minor modifications which are left to the reader.)
2) We have u(x) = u(y) for every nodal pair x, y ∈ D.
3) For a domain component C of S of genus gC with nC special points sothat 2 · gC + nC ≤ 2 we have
∫Cu∗ω > 0.
57

We call two such tuples (S, j,M,D, u) and (S ′, j′,M ′, D′, u′) equivalent ifthere exists a biholomorphic map φ : (S, j,M,D)→ (S ′, j′,M ′, D′) with
u′ φ = u.
An equivalence class is called a (connected) stable curve of class (m, δ). An αis called a stable map. Hence a stable curve is an equivalence class of stablemaps. Requirement 3) is called the stability condition.
Next we introduce the space Z which later will be equipped with thepolyfold structure.
Definition 4.4. Fix a δ0 ∈ (0, 2π). The collection of all equivalenceclasses [α] of tuples α of class (3, δ0) is called the space of stable curves intoQ of class (3, δ0) and is denoted by Z, or by Z3,δ0(Q,ω).
The set Z has a natural topology. The topology is related to the topologyon the Sobolev space of H3-maps on a punctured Riemann surfaces withexponential decay near the nodes, where the model of decomposition (fromun-noded to noded) is that described in Subsection 3.3. We shall discussthis, of course, in more detail.
Theorem 4.5. Given δ0 ∈ (0, 2π) the space Z3,δ0(Q,ω) has a naturalsecond countable paracompact topology.
As we shall see the space even has some kind of a smooth structure,namely that of a polyfold. In order to prepare this notion we discuss ourexample a little bit further.
Consider the category C whose objects are the tuples α = (S, j,M,D, u).This is a very large category which is not even a set. Next we define mor-phisms as follows. A morphism Φ : α → α′ is a tuple (α, φ, α′), whereφ : (S, j,M,D) → (S ′, j′,M ′, D′) is a biholomorphic map preserving the or-dered marked points M and the nodal pairs, so that in addition u′ φ = u.If we call two objects equivalent if there is a morphism between them weobtain the orbit space |C| = C/ ∼. The latter is by our definition preciselyZ, which is a set.
The good thing of C compared to Z is that we keep track of the sym-metries, the bad thing (among others) is that C is too big. The first ideais now to ’weed’ out a lot of objects so that we obtain a small category, i.e.
58

the objects and morphisms form a set. If we have done it cleverly we try todefine a topology on the set of objects which gives us a notion about close-ness of two objects or two morphisms (note that we talk about closeness oftwo objects and not about the closeness of two equivalence classes). If thathas been achieved we even try more, namely to define M-polyfold structureson the topological spaces of objects and morphisms so that the natural op-erations in the category become smooth. This will lead to the notion of anep-groupoid (or polyfold groupoid), which can be viewed as a generalizationof an atlas of a M-polyfold.
4.2 Polyfold Groupoids and Polyfolds
The following material is discussed in detail in [23]. The reader should notethat in some sense we generalize the notion of an etale proper Lie groupoidto the differential geometry based on local sc-models. As such we generalizeideas described in [37] and which go back to ideas presented [15, 16, 17].
A groupoid G is a small category where every morphism is invertible. Re-call that a category is small provided the class of objects as well as morphismsis a set. In the future we shall denote the groupoid as well as its object setby G and the morphism set by G. From the category structure we have fivestructure maps. The source and target maps t, s : G → G associating toa morphism its source and target, respectively. Then there is the inversionmap i : G → G, the 1-map G → G : x → 1x and the multiplication mapm : Gs×tG→ G; (φ, ψ)→ φ ψ.
In the following we mean by a M-polyfold a sc-smooth space with buildon neat local sc-models. Of course, a subcase is that where we do not havea boundary with corners.
Definition 4.6. An ep-groupoid also called polyfold groupoid consists ofan groupoid X where the object and morphism set carry M-polyfold structuresso that the following holds.
1) The source and target maps are surjective local sc-diffeomorphisms. Inparticular the fibered product Xs×tX has a natural M-polyfold structure.
2) The structure maps i : X → X, u : X → X and m : Xs×tX → X aresc-smooth.
3) Every point x ∈ X has an open neighborhood U = U(x) so that
59

t : s−1(U) → X is proper. (Using that the inversion map is a sc-diffeomorphism one can interchange the role of s and t in this defini-tion.)
Given an ep-groupoid X we can define its orbit space |X| by calling twopoints x and y in X equivalent providing there exists a morphism φ : x →y. We equip |X| with the quotient topology. Clearly |X| has a filtration|X|m := |Xm| by nested topological spaces.
The following lemma is proved in [23]:
Lemma 4.7. For an ep-groupoid X the orbit space |X| as well as thespaces |X|i := |Xi| are metrizable spaces.
To begin the discussion we need the following definition.
Definition 4.8. A functor F : X → Y between two ep-groupoids is sck,provided the induced map between the object and morphism M-polyfold is sck.
Let us observe that a a sck-functors induces a sc0-map between the orbitspaces |F | : |X| → |Y |.
Let us denote for x ∈ G by G(x) the isotropy group of x. It consists of allmorphisms φ : x→ x. Observe that for ep-groupoid G every isotropy groupis finite. This is an immediate consequence of the properness condition andthe fact that the source and target maps are local sc-diffeomorphisms.
Definition 4.9. Let X and Y be two polyfold groupoids. An equivalenceF : X → Y is a functor satisfying the following
1) F is a local sc-diffeomorphism on objects.
2) F induces a sc-homeomorhism |F | : |X| → |Y |.
3) For every x ∈ G the functor F induces a bijection between the isotropygroups G(x) and G(F (x)).
Remark 4.10. It seems slightly annoying that equivalences are in gen-eral not invertible as functors. However, this picture will improve when wepass to some category with the same objects in which these equivalences canbe inverted. The big picture is the following. At the moment we considerthe category which has as objects the polyfold groupoids and the sc-smooth
60

functors as morphisms. If we view an ep-groupoid as a generalization of anatlas we would like that for example a refinement of an atlas is an isomorphicobject. An equivalence can be viewed as the generalization of such a refine-ment. However, as we have seen it is not invertible in general. Fortunately,category theorists thought about this problem. Namely given a categoryand a favorite set of arrows there is a natural procedure (called calculus offractions) which allows to produce a new category with the same objects sothat the favorite arrows are all turned into isomorphisms by only changingthe collection of morphisms as little as possible, i.e. keeping the ”structuraldamage” to the category minimal. The concrete realization of this procedurein our category has a simple description, which we will describe later andwhere we follow the ideas from the Lie groupoid case, see [37]. See [14] forthe general theory.
We want to relate two polyfold groupoids and introduce the notion ofa common refinement, which in some sense generalizes the idea that two(compatible) atlases on a manifold have a common refinement.
Definition 4.11. Let X and X ′ be two polyfold groupoids. A com-mon refinement consists of a third polyfold groupoid X ′′ and equivalencesF : X ′′ → X and F : X ′′ → X ′.
An important observation is that this defines an equivalence relation.
Proposition 4.12. The notion of having a common refinement is anequivalence relation.
In order to show this, one needs a fundamental construction which willfrequently occur. This is the so-called weak fibered product. We start withthe notion of natural equivalence in our category of polyfold groupoids.
Definition 4.13. Two sc-smooth functors F,G : X → Y between thesame pair of polyfold groupoids are called naturally equivalent provided thereexists a sc-smooth map τ : X → Y associating to an object x ∈ X a mor-phism τ(x) : F (x) → G(x) which is natural in the sense that for everyh : x→ x′ in X the identity
τ(x′) F (h) = G(h) τ(x)holds. The map τ is called a natural transformation.
61

Let us observe that two naturally equivalent functors induce the samemaps |F | and |G| between the orbit spaces. We also observe that naturalequivalence is an equivalence relation.
Consider a diagram of sc-smooth functors
XF−→ Y
G←− X
between polyfold groupoids. Our aim is to define a new polyfold groupoidL = X ×Y Z. This will only be possible under some assumptions on thediagram, f.e. if one of the functors is an equivalence. The object set L isby definition the collection of all triples (x, ϕ, z) ∈ X × Y × Z such thatϕ : F (x)→ G(z) is a morphism in Y:
L = (x, ϕ, z) ∈ X ×Y × Z |s(ϕ) = F (x), t(ϕ) = G(z).
The morphism set L is defined as
L = (h, ϕ, k) ∈ X×Y × Z | s(F (h)) = s(ϕ), s(G(k)) = t(ϕ).
We define s, t : L→ L by
s(h, ϕ, k) = (s(h), ϕ, s(k)), t(h, ϕ, k) = (t(h), G(k) ϕ F (h−1), t(k)).
Composition of morphisms is defined by
(h, ϕ, k) (h′, ψ, k′) = (h h′, ψ, k k′).
The identity map and inversion maps are clear, namely
(x, ϕ, y)→ (1x, ϕ, 1y) and (h, ϕ, k)→ (h−1, G(k) ϕ F (h−1), k−1)
At this point we have defined a weak fibered product L as a set. We wantto define it as a polyfold groupoid. For this one needs the following easylemma. The proof can be found in [23] and is quite straight forward.
Lemma 4.14. Assume that X, Y and Z are M-polyfolds and f : X → Ya local sc-diffeomorphism and g : Z → Y a sc-smooth map. Then the fiberedproduct Xf×gZ has a natural M-polyfold structure and the projection π2 :Xf×gZ → Z is a local sc-diffeomorphism.
Armed with this lemma we can prove the following important result.
62

Theorem 4.15. Assume that F : X → Y and G : Z → Y are sc-smooth maps between polyfold groupoids. In addition assume that F is anequivalence. Then the weak fibered product X ×Y Z is in a natural way apolyfold groupoid and the projection X ×Y Z → Z is an equivalence.
We note that in case both maps are equivalences, then the projectionsonto X and Z are both equivalences. The following proof is taken in someslight modification from [23].
Proof. One can identify X ×Y Z naturally with either XF×sπ1(Yt×GZ)or (XF×sY)tπ2×GZ. Using either of both bracketings and the previouslemma we obtain a natural M-polyfold structure on the object set L. For themorphism set one can argue similarly. It is rather straight forward to verifythat all structural maps have the desired properties, i.e. the source and targetmaps are local sc-diffeomorphisms and the one-map, multiplication map andinversion map are sc-smooth. The next point is to show the properness.
Pick a point a = (x0, ϕ0, z0). Using the properness of X and Z we findopen neighborhoods U(x0) and V (z0) so that
t : s−1(U(x0))→ X and t : s−1(V (z0))→ Z
are proper. Define for a0 = (x0, ϕ0, z0) ∈ L the open subset W (a0) by
W (a0) = (x, ϕ, z) ∈ L | x ∈ U(x0), z ∈ V (z0).
Let us show that t : s−1(W (a0)) → L is proper. Assume we are givena sequence (hj , ϕj, kj) ∈ L with s(hj, ϕj , kj) ∈ W (a0) and without loss of
generality t(hj, ϕj , kj) → b = (x, ϕ, z). Since t(hj) → x and s(hj) ∈ U(x0)we may assume by the properness of X (after taking a subsequence) thathj → h and similarly utilizing the properness of Z that (after taking afurther subsequence) kj → k. Since ϕj : s(F (hj)) → s(G(kj)) and Y isproper we may assume that ϕj → ϕ. Hence we have proved that (hj , ϕj, kj)has a convergent subsequence. This proves properness.
Next we show that
p : X ×Y Z → Z (17)
is an equivalence. We know that p is a sc-smooth functor which is a local sc-diffeomorphism on objects and morphisms in view of the previous Lemma.
63

If a = (x, ϕ, z) ∈ L we have p(a) = z and have to show that p induces abijection L(a)→ Z(z). We have
L(a) = (h, ϕ, k) | h : x→ x, k : z → z, ϕ F (h) = G(k) ϕ.
Since F is an equivalence h is completely determined by k so that our mapp defines the correspondence
(F−1(ϕ−1 G(k) ϕ), ϕ, k) ! k.
Finally we need to show that |p| : |L| → |Z| is a sc-homeomorphism. Sincep is a sc-smooth functor |p| is sc0. If |p(x, ϕ, z)| = |p(x′, ϕ′, z′)| there existsa morphism k : z → z′. Since F is an equivalence there exists a morphismh : x→ x′ such that F (h) = (ϕ′)−1 G(k) ϕ. Then
(h, ϕ, k) : (x, ϕ, z)→ (x′, ϕ′, z′)
is a morphism. Hence |p| is injective. If |z| ∈ |Z| is given consider G(z). Since|F | is a homeomorphism we find a x ∈ X with |F (x)| = |G(z)|. Hence thereexists a morphism ϕ : F (x) → G(z). This implies that |p|(|(x, ϕ, z)|) = |z|.Since p is a local sc-diffeomorphism we find for given a = (x, ϕ, z) an openneighborhood W (a) and an open neighborhood U(z) so that p : W (a) →U(z) is a sc-diffeomorphism. We can define W(a) to be the collection ofall morphisms between points in W (a). Then p−1 is a sc-smooth functorW (a) → L and induces a sc0 map |p−1|. Clearly this is a local inverse.Hence |p| is a sc-homeomorphism. This completes the proof.
Given a polyfold groupoid Y an equivalence F : X → Y can be viewedas a refinement. Given another refinement G : Z → Y we have now tworefinements of Z. We shall show now how to construct a common refinementof X and Z which in some sense is compatible with the given refinements byF and G.
Proposition 4.16. Assume that F : X → Y and G : Z → Y areequivalences between polyfold groupoids. Then there exists a polyfold groupoidL and equivalences Φ : L→ X and Ψ : L→ Z so that F Φ and G Ψ arenaturally equivalent.
Proof. Define L = X ×Y Z and let Φ = π1 and Ψ = π2 which we know areequivalences. Define the natural transformation τ : L→ Y by τ(x, ϕ, y) = ϕ.
64

Note that
ϕ : F (π1((x, ϕ, y)) = F (x)→ G(z) = G(π2(x, ϕ, z)).
Here π2 is the projection onto the Z-factor.
As we already mentioned before we would like to construct a new categoryin which equivalences are invertible. In order to do so we consider diagrams
d : XF←− A
Φ−→ Y,
where X, A and Y are polyfold groupoids, F is an equivalence and Φ ansc-smooth functor. Such a diagram will, as we shall see, be a representativeof a morphism between X and Y . Let us call such a diagram d a diagramfrom X to Y . We observe that such a diagram induces an sc0-map |d| definedby
|d| = |Φ| |F |−1.
In a first step we define the notion of a refinement of such a diagram.
Definition 4.17. Assume that d : XF←− A
Φ−→ Y is a diagram from X to
Y . A diagram d′ : XF ′
←− A′ Φ′
−→ Y from X to Y will be called a refinementof d if there exists an equivalence H : A′ → A such that F H and F ′ arenaturally equivalent and Φ F and F ′ are naturally equivalent. Let us writeH : d′ → d if d′ refines d via the equivalence H ′ : A′ → A.
Here are two remarks:
Remark 4.18. 1) Trivially, if d′ refines d, the induced maps |d| and |d′|are the same. Indeed,
|d′| = |Φ′| |F ′|−1 = |Φ H| |F H|−1 = |Φ| |H| |H|−1 |F |−1 = |d|.
2) If d′ refines d, and d′′ refines d′, then d′′ refines d. Then H ′ H ′′ : A′′ → Ais an equivalence. Moreover, F H ′ H ′′ is naturally equivalent to F ′ H ′′
which in turn is naturally equivalent to F ′′, so that F ′′ is naturally equivalentto F (H ′ H ′′). Similarly for the functors G′′ and G (H ′ H ′′).
It is clear what it means that two diagrams d and d′ from X to Y have acommon refinement. The crucial observation is the following:
65

Proposition 4.19. Assume that d, d′ and d′ are diagrams from X toY . Assume that d and d′ have a common refinement e and d′ and d′′ have acommon refinement e′. Then d and d′′ have a common refinement.
Proof. Let d′ be the diagram XF ′
←− A′ Φ′
−→ Y . Assume that the commonrefinements e and e′ of (d, d′) and (d′, d′′), respectively, are given by
XG←− B Ψ−→ Y and X
G′
←− B′ Ψ′
−→ Y.
Let H : B → A′ and H ′ : B′ → A′ be the the equivalences associated to theserefinements. We can build the associated weak fibered product L = B×A′B′
and write (xϕx′) for its elements. We write π1 for the projection to B and
π2 for the projection to B′. Consider now the diagram
f : XGπ1←−−− L
Ψπ1−−−→ Y.
This is our candidate for a common refinement. Recall that we know from theresult about weak fibered products that π1 and π2 are equivalences. Henceπ1 : f → e is an obvious refinement. We claim that π2 refines e′ by f . Forthis it suffices to show that Ψ π1 and Ψ′ π2 are naturally equivalent andthat the same holds for G π1 and G′ π2.
We have Ψ′ π2(xϕx′) = Ψ′(x′) and since Ψ′ is naturally equivalent to
Φ′ H ′ we see that Ψ′ π2 is naturally equivalent to Φ′ H ′ π2. The latteris, however, naturally isomorphic to Φ′ H π1. Since Φ′ H is naturallyisomorphic to Ψ we see that Ψ′ π2 is naturally isomorphic to Ψ π1. Theremaining part of the proof is similar.
As a consequence of the proposition we see that saying the two diagramsfrom X to Y have a common refinement defines an equivalence relation.
Definition 4.20. The equivalence class [d] of a diagram from X to Y iscalled a generalized map.
By a previous discussion we know that there is a well-defined map |[d]| :=|d| : |X| → |Y | to such an equivalence class.
Let us note that if [d] : X → Y and [e] : Y → Z are generalized maps,there is a well-defined composition [e] [d] := [f ], where f is constructed as
follows. Assuming that d : XF←− A
Φ−→ Y and e : YG←− B
Ψ−→ Z consider the’long’ diagram
XF←− A
Φ−→ YG←− B Ψ−→ Z.
66

Using the middle portion we can build the weak fibered product and obtain
f : XFπ1←−−− A×Y B Ψπ2−−−→ Z.
Note that F π1 is an equivalence since G is an equivalence. We leave it asan exercise that [f ] does not depend on the choice of the representatives dand e.
At this point, the category of interest for us is the category where theobjects are polyfold groupoids and the morphisms are generalized maps, i.e.equivalence classes of diagrams. The original category with the same objects,but the sc-smooth functors as morphisms maps into this new category as theidentity on objects, and on morphisms, by mapping an sc-smooth functorΦ : X → Y to the equivalence class of the diagram
XId←− X
Φ−→ Y.
If we start with an equivalence F : X → Y the associated diagram dF hasan equivalence class [dF ] which is inverted by the equivalence class of the
diagram YF←− X
Id−→ X. In particular any diagram XF←− Y
F−→ X, where Fis an equivalence represents the identity morphism of X.
Remark 4.21. Assume that d : XF←− A
Φ−→ Y is a diagram from X to Y .If Φ is an equivalence, it is a trivial exercise that [d] is invertible. Hence one
might raise the question if invertibility of some class [XF←− A
Φ−→ Y ] impliesthat Φ is an equivalence. In finite dimensions, i.e. in the context of etaleproper Lie groupoids this is indeed the case. However the finite-dimensionalproof relying on the implicit function theorem does not go through in ourmore general situation and it might even be wrong.
In view of this remark we define the notion of strong invertibility asfollows.
Definition 4.22. A generalized map [d] : X → Y is said to be stronglyinvertible (s-invertible for short) if there exists a representative d of the form
XF←− A
G−→ Y with F and G being equivalences.
Now we can define the notion of a polyfold structure.
Definition 4.23. A polyfold structure on a paracompact space Z is a pair(X, β), where X is a polyfold groupoid and β : |X| → Z a homeomorphism.
67

Two polyfold structures (X, β) and (X ′, β ′) on Z are equivalent provided thereexists an s-invertible generalized map [d] : X → X ′ with β|d| = β. A secondcountable paracompact space equipped with an equivalence class of polyfoldstructures is called a polyfold.
Let us observe that a polyfold Z has a degeneracy map d : Z → N
defined by d(z) := dX(β−1(z)), where X is a polyfold groupoid so that (X, β)defines the polyfold structure. This is independent of the representativesince equivalences preserve the degeneracy index, since they are local sc-diffeomorphisms.
In some sense a polyfold structure is a generalization of an atlas fora M-polyfold. To see this start with a M-polyfold Z and take an atlas(φi, Ui, Oi)i∈I where (Ui) is a locally finite covering of Z and the Oi are the lo-cal M-polyfold models. Define a groupoid X having as object set the disjointunion of all Oi. This carries in a natural way the structure of M-polyfold.Next we define a morphism set X as follows. A morphism Φ : o → o′ whereo ∈ Oi and o′ ∈ Oi′ is the triple (o, φi′ φ−1
i , o′). Take the union of all theseand denote the set by X. Define the source map and target maps by
s(o, φi′ φ−1i , o′) = o and t(o, φi′ φ−1
i , o′) = o′.
The maps s and t are surjective. Then it is straight forward to equip X withthe sc-smooth structure making the map s a local sc-diffeomorphism. Sincethe transition maps are sc-smooth the same is true for t. It is clear whatcomposition of morphisms is and that all structure maps are sc-smooth. Leto ∈ X. Then o belongs to a unique Oi. There exists an open neighborhoodV (o) so that V (o) ⊂ Oi, and there are only finitely many j with φ−1
j (Oj) ∩φ−1i (V ) 6= ∅. Consider t : s−1(V )→ X and let K ⊂ X be a compact subset.
We have to show that under the previous map t the preimage is compact.Take therefore any sequence of morphisms Φk with t(Φk) ∈ K and s(Φk) ∈ V .After taking a subsequence we may assume that Φk = (ok, φj φ−1
i , o′k) ando′k → o′ in K. This implies that ok converges as well. Hence Φk convergesas well by the definition of the topology on X. Hence we see that a locallyfinite atlas for the M-polyfold Z gives us an ep-groupoid. We leave to thereader to work out the notion generalizing the equivalence of two atlases?
Definition 4.24. Let Z and Z ′ be two polyfolds with polyfold structuredefined by (X, β) and (X ′, β ′), respectively. An sc-smooth map f : Z → Z ′,
68

is an equivalence class of pairs [(f, [d])], where [d] : X → X ′ is a generalizedmap so that β ′ |d| = f β. It is clear what the notion of equivalence is.
So studying an sc-smooth map f : Z → Z ′ is equivalent to study forsuitable ep-groupoids A and X ′ a sc-smooth functor Φ : A→ X ′. Indeed, if
(X, β) is the model for Z and (X ′, β ′) for Z ′ and d : XF←− A
Φ−→ X ′ satisfiesβ ′|d| = f β, then (A, β|F |) is an equivalent model for Z and with respectto this model f is represented by Φ : A→ X ′.
4.3 Deligne-Mumford-Type Spaces via Lie Groupoids
In the next subsection we give an overview over the polyfold construction inGromov-Witten theory. In a first step we recall the necessary results aboutDeligne-Mumford type spaces. We give a Lie groupoid version which willprepare us for the polyfold construction. More precisely we need etale properLie groupoids. Let us recall that polyfold groupoids are generalizations ofetale proper Lie groupoids.
Definition 4.25. A Lie groupoid X consists of a small category wherethe object set as well as the morphism set carry a manifold structure. More-over the source and target maps are surjective submersions. In addition allstructure maps are smooth. A Lie groupoid is called etale provided the sourceand target maps are local diffeomorphisms. A Lie groupoid is called properprovided the map
X(s,t)−−→ X ×X
is proper.
Let us start with the space of biholomorphic equivalence classes of con-nected, stable, noded Riemann surfaces with un-ordered marked points.More precisely we consider tuple α = (S, j,M,D), where (S, j) is a closedRiemann surface, M a collection of un-ordered marked points and D a col-lection of nodal pairs. The set D consists of finitely many two point setsx, y with x 6= y and x, y ∈ S. We write |D| for the union of all x, y andcall the elements of |D| nodal points. We assume that the pairs in D havethe property that x, y and x′, y′, if they intersect, are the same sets. Inaddition we assume that M and |D| are disjoint. The tuple α is said to beconnected provided the topological space obtained by identifying for every
69

x, y ∈ D the point x with the point y results in a connected topologicalspace S. We note that S itself might have different connected components.The stability condition on α requires that for every connected component Cthe inequality 2 · g(C) + ♯(C ∩ (M ∪ |D|)) ≥ 3 holds. Here g(C) is the genusof C. We call C ∩ (M ∪ |D|) the collection of special points on C. Two suchtuples are considered equivalent (or isomorphic) if there exists a biholomor-phic map φ : (S, j) → (S ′, j′) satisfying φ(M) = M ′ and φ(D) = D′. Hereφ(D) = φ(x), φ(y)| x, y ∈ D. The set N consists of all such equiva-lence classes [α]. The set N has interesting subsets. For example if g and kare non-negative integers with 2g+k ≥ 3 we denote by Ng,k the subset of all[α] so that α has arithmetic genus g and k marked points. The arithmeticgenus of α is defined by the formula
ga = 1 + ♯D +∑
C
[g(C)− 1].
Note that ♯D is the number of nodal pairs and half the number of specialpoints |D|. This geometric genus can be obtained geometrically as the genusof the Riemann surface obtained by taking disk around the nodes in everynodal pair and replacing the two disk by a connecting tube (for all nodalpairs).
The space N has a natural second countable paracompact topology whichwe call the DM-topology. For this topology the subspace of all [α] withD = ∅is open and dense. We shall give a basis for the topology. The constructionof the topology will involves a gluing profile. The topology, however, will beindependent of the choices involved. We take the exponential gluing profileϕ(r) = e
1r − e and start with α = (S, j,M,D) representing an element in N .
Definition 4.26. The automorphism group G of α consists of all iso-morphisms α→ α.
The stability condition implies that G is a finite group.Fix for every nodal point x ∈ |D| a small disk Dx centered at x with
smooth boundary. We assume that any two of such disks are disjoint andthat none of them contains any point from M . We assume that the unionof all such disks ∪x∈|D|Dx is invariant under the action of G. We call thecollection of such disks invariant under G a small disk structure and write
70

D = (Dx)x∈|D|. We define
|D| =⋃
x∈|D|
Dx.
Assume we are given a collection of complex numbers a = ax,y | x, y ∈D in the open unit disk parameterized by the nodal pairs x, y. We calla a gluing parameter and ax,y the gluing parameter at x, y. Denote byDa the subset of D consisting of all nodal pairs x, y with vanishing gluingparameter. If ax,y 6= 0 take positive holomorphic polar coordinates at x,say and negative ones at y.
hx : R+ × S1 → Dx \ 0 and hy : R− × S1 → Dy \ 0.
Discard all points hx(s, t) in Dx and hy(s′, t′) in Dy with ϕ(|ax,y|) < s,−s′.
Then identify the point hx(s, t) with hy(s′, t′) provided s = s′+ϕ(|ax,y|) and
t = t′ +ϑ, where ax,y = |ax,y| ·e−2πiϑ. We do this at every nodal pair if theassociated gluing parameter is nonzero. At the nodal pairs with vanishinggluing parameters we do nothing. Consequently we obtain a new Riemannsurface (Sa, ja) with a new set of nodal pairs Da. The marked points on Sgive marked points Ma on Sa. Hence we obtain (Sa, ja,Ma, Da) which wecall the glued surface or the surface obtained by plumbing.
If k is a smooth complex structure on S which coincides with j on thedisks of the small disk structure we obtain a complex structure ka on Sa. Nowstarting with α = (S, j,M,D), having fixed a small disk structure D = (Dx),and an open C∞-neighborhood of j consisting of smooth complex structureson S, we define for ε ∈ (0, 1)
V (α, U,D, ε) = [Sa, ka,Ma, Da] | |a| < ε, k ∈ U and k = j on |D|.
Indeed, these are the typical sets of a basis for the natural DM-topology.
Proposition 4.27. The collection of all V (α, U, |D|, ε) is a basis for thenatural DM-topology. This topology does not depend on the choice of thegluing profile. Moreover, the topology is second countable and paracompact.For this topology the subsets Ng,k with 2g + k ≥ 3 are compact.
We shall need the explicit constructions of the glued surfaces later if theobjects are also equipped with maps and we have to implant our gluingconstructions for maps.
71

In a first step we describe an open neighborhood of [α] in the subspace ofN having the same nodal structure. Assume that α = (S, j,M,D) representsan element in N and G is its automorphism group. We denote by Γ0(α) thevector space of all smooth sections of TS → S which vanish at the pointsin M ∪ |D|. Further let Ω0,1(α) be the space of all smooth sections y ofHomR(TS, TS)→ S so that y(z) is complex anti-linear. The linear Cauchy-Riemann operator defines a linear operator
∂ : Γ0(α)→ Ω0,1(α).
In local holomorphic coordinates ∂ is defined by
(∂f)(z) =1
2· (∂xf(z) + i∂yf(z))(dx− idy).
As a consequence of Riemann-Roch we obtain the following result.
Proposition 4.28. Let α be stable and connected. Then the operator∂ : Γ0(α)→ Ω0,1(α) is a complex linear and injective Fredholm operator with(complex) index given by
ind(∂) = −(3 · ga + ♯M − ♯D − 3).
We can define a complex vector space of dimension 3 · ga + ♯M − ♯D− 3,denoted by H1(α), by
H1(α) = Ω0,1(α)/im(∂),
where im denotes the image. The automorphism group G acts on H1(α) ina natural way via
g ∗ [r] = [(Tg)r(Tg)−1].
We call this the natural representation of G. If we have a G-action on acomplex vector space, which is equivariantly isomorphic to H1(α) we saythat G has the natural representation on E.
If we are given a connected stable α and a smooth family v → j(v) ofcomplex structures on S we can consider the family
v → αv = (S, j(v),M,D).
Here let us assume that V is an open neighborhood of 0 in some complexvector space E. If j(0) = j we call v → j(v) a deformation of j. If we
72

differentiate j(v) with respect to v into the direction δv we see that Dj(v) ·δvis a complex anti-linear map. Indeed, since j(v) j(v) = −Id, we obtain
j(v) (Dj(v)δv) + (Dj(v)δv) j(v) = 0.
Hence, for every z ∈ S we have that (Dj(v)δv)(z) : TzS → TzS is a complexanti-linear map if domain and target are equipped with j(v)(z). Conse-quently the map δv → Dj(v)δv induces a linear map
[Dj(v)] : E → H1(αv)
via δv → [Dj(v)δv]. We call [Dj(v)] the Kodaira differential. In some sense,if we consider all [α′] near [α] having the same nodal structure, then H1(α)can be viewed as the tangent space. This will become clear from the followingdiscussion. There are several important definitions.
Definition 4.29. Let α = (S, j,M,D) represent a class in N and let Ea complex vector space with the natural representation of the automorphismgroup G of α. Assume that V ⊂ E is an open neighborhood of 0 ∈ E andv → j(v), v ∈ V , a smooth family of complex structures on S.
1) The family is called complex if [Dj(v)] is complex linear for every v ∈V .
2) The family is called effective if [Dj(v)] is a real linear isomorphism forevery v ∈ V .
3) The family is symmetric if V is invariant under the natural G-action onE and for every g ∈ G the diffeomorphism g : S → S is a biholomorphicmap
g : αv → αg∗v.
A good deformation of j consists of a complex vector space E with the naturalrepresentation of G, an G-invariant open neighborhood V of 0 ∈ E and asmooth family v → j(v) of complex structures on S such that j(0) = j,in addition the family is effective and symmetric and there exists an openneighborhood U of |D| so that j(v) = j on U for all v ∈ V . It is called agood complex deformation if the family in addition is complex.
73

We note that in the symmetric case we have
[Dj(g ∗ v)(g ∗ δv)] = [(Tg)(Dj(v)δv)(Tg)−1].
It takes a little bit of construction to prove the following, see [?]
Proposition 4.30. For every stable α there exists a good complex defor-mation.
The following is quite straight forward and states given the previousproposition an obvious result.
Proposition 4.31. Given a good deformation v → j(v) with j(v) = jon U = U(|D|) for v ∈ V we can find a small disk structure D with |D| ⊂ U .
At this point we are almost prepared to describe the neighborhood of aclass [α] firstly in the subspace of elements having the same nodal structurejust using suitable good deformations and secondly in N by using the gooddeformations used in case one combined with the plumbing (or equivalently:gluing) construction.
For the following part of the construction let us make the following stand-ing assumption. The representative (S, j,M,D) of a stable class [α] ∈ N isgiven and we have fixed a good deformation v → j(v) of j parameterizedby v ∈ V , where V is an open G-invariant open neighborhood of 0 ∈ E.Here G is, of course, the automorphism group of α. In addition a small diskstructure D is fixed so that j(v) = j on |D| for all v ∈ V . Having fixed allthis data we proceed with our construction.
We take for every nodal point x ∈ |D| a biholomorphic map hx : (D1, 0)→(Dx, x) (There is an ambiguity coming from rotations.). For every nodalpair x, y ∈ D there exists a uniquely determined complex anti-linear mapϕx,y : TyS → TxS (called nodal tangent identification) such that with ϕy,xbeing the inverse
T hy(0)−1 ϕy,x T hx(0) : C→ C
is complex conjugation z → z. For a nodal pair x, y and g ∈ G thecomposition
ϕx,y Tg(y)−1 ϕg(x),g(y) Tg(x) : TxS → TxS
74

is unitary and consequently multiplication by an element in the unit circleS1 ⊂ C. Here is an important remark. By a straight forward calculationone verifies that replacing the order of x and y gives the same element inS1 defining the unitary map TyS → TyS. We denote this element in S1 byσx,y(g). It only depends on g and the nodal pair x, y ∈ D. One easilyverifies for h, g ∈ G and arbitrary nodal pair x, y the formula
σx,y(hg) = σg(x),g(y)(h) · σx,y(g). (18)
Using this construction we can define a natural action on the gluing param-eters as follows. Denote by N the finite-dimensional vector space of mapsD → C which associate to a nodal pair x, y a complex number ax,y. Thendefine a G-action by
b = g ∗ a, bg(x),g(y) = σx,y(g)ax,y.
The fact that this indeed defines an action relies on the identity (18). Wecan use the natural G-action on E and extend it to an action on N × E inthe obvious way.
g ∗ (a, e) = (q ∗ a, g ∗ e).At this point we take for every nodal pair x, y (note that this this is un-ordered) positive holomorphic polar coordinates for Dx defined by
hx : [0,∞)× S1 → Dx : hx(s, t) = hx(e−2π(s+it))
and negative ones
hy : (∞, 0]× S1 → Dy : hy(s′, t′) = hy(e
2π(s′+it′)).
In the following (s, t) will always denote positive and (s′, t′) negative holomor-phic polar coordinates. The following constructions a priori might dependon the order of x and y, but, as it turns out, this will not be the case.
Next we will use the gluing (or plumbing) construction and this requiresthe choice of gluing profile ϕ. There are two profiles of interest to us. One isthe logarithmic gluing profile ϕ(r) = − 1
2πln(r) and the other the exponential
one ϕ(r) = e12 −e. In [?], using implicit function type arguments it is evident
that any gluing profile with suitable estimates on its derivatives can be usedto define a smooth orbifold structure on N .
75

We first use the the logarithmic gluing profile. Using the good defor-mation v → j(v) and the small disk structure D (previously described) weobtain the family
(a, v)→ α(a,v) = (Sa, j(a, v),Ma, Da)
defined for (a, v) ∈ A × V , where A ⊂ N is a suitable G-invariant openneighborhood of 0. Here, using previous notation j(a, v) = j(v)a. Let usnote that every g ∈ G gives a canonical automorphism
ga : α(a,v) → αg∗(a,v).
The Riemann surface Sa has certain distinguished sub-domains which are ofthe kind which already appeared in the discussion of the plus- and the minus-gluing. To see this fix a nodal pair x, y ∈ D. Associated to it we have the
finite cylinder Cx,yax,y
consisting of the set of points z ∈ Sa with z = [hx(s, t)]and (s, t) ∈ [0, R]× S1. Here, of course, R = ϕ(|ax,y|), assuming that the
gluing parameter is non-zero. Otherwise Cx,yax,y = Dx ∪ Dy together with
the nodal pair x, y. As already discussed before, if ax,y 6= 0, the cylinder
Cx,yax,y has to two different distinguished holomorphic coordinate systems.
Namely [hx(s, t)] → (s, t) and [hy(s′, t′)] → (s′, t′). Of course, they will
play a role in the gluing constructions when we also deal with maps on theRiemann surface. Let us define Ca ⊂ Sa by
Ca =⋃
x,y∈D
Cx,yax,y
.
Definition 4.32. The complement in S of the interiors of the disks ofthe small disk structure will be called the core of S. Similarly the core of Sais the complement of the interior of Ca.
Let us observe that the core of S as well as the core of Sa can be naturallyidentified.
Assume that (a0, v0) ∈ N × V is given and denote by D∗ the collectionof all nodal pairs in D with a0
x,y 6= 0. Assume that we only vary thesenon-zero gluing parameters. Then it is an easy exercise to construct a newsmooth complex structure j∗(b, v) on Sa0 , where b ∈ N(a0) := CD∗
is small,so that (Sa0 , j
∗(b, v),Ma0 , Da0) and α(a0+b,v) are isomorphic by a map which isthe identity on the core. Let us call this construction the ”freezing of gluing
76

parameters”. Then we can take the Kodaira differential at (b, v) = (0, v0)with respect to (b, v). and obtain a linear map
[PDj(a0, v0)] : N(a0)× E → H1(α(a0,v0)),
called the partial Kodaira differential. At this point we are able to identifycertain families of stable Riemann surfaces which will turn out the buildingblocks for our etale proper Lie groupoids describing the smooth structure onN . In the following we continue to work with the logarithmic gluing profile.
Definition 4.33. We denote by (S, j,M,D) a stable element and con-sider a family (a, v) → α(a,v) defined for (a, v) ∈ O ⊂ N × E, where O isan open G-invariant neighborhood of (0, 0), constructed from a good complexfamily v → j(v) and a small disk structure D as described above so that thefollowing properties hold true:
1) The set U = [α(a,v)] | (a, v) ∈ O is open in N .
2) The map p : O → U : (a, v) → [α(a,v)] induces a homeomorphismG\O→ U .
3) If there exists an isomorphism φ : α(a,v) → α(a′,v′), where (a, v), (a′, v′) ∈O, then there exists a g ∈ G with (a′, v′) = g ∗ (a, v) and φ = ga.
4) The partial Kodaira differentials for (a, v) ∈ O, say
PDj(a, v) : N(a)×E → H1(α(a,v))
are complex linear isomorphisms.
Then we say that (a, v)→ α(a,v) is a uniformizing family with domain O.
The following theorem and its consequences will give a repacking of someof the classical Deligne-Mumford theory.
Theorem 4.34. For the logarithmic gluing profile there exists for everystable α = (S, j,M,D) representing a class in N a uniformizing family
(a, v)→ α(a,v), (a, v) ∈ O.
77

Whatever comes now is a consequence of this theorem, though in generalit requires some nontrivial work on the level of implicit function theorems.Associated to a uniformizing family (a, v) → α(a,v) we can define the setΞ = Ξα by
Ξ = (a, v, α(a,v)) | (a, v) ∈ O.We equip it with the structure of a complex manifold by requiring that themap
Ξ→ O : (a, v, α(a,v))→ (a, v)
is biholomorphic. We shall also call such a Ξ an uniformizing family. Wehave a natural map p : Ξ→ N defined by
p(a, v, α(a,v)) = [α(a,v)].
Let us write o for an element in Ξ, ie. o = (a, v, α(a,v)). We also write αo forα(a,v) occurring in o = (a, v, α(a,v)). Assume next we are given Ξ and Ξ′. Weconsider tuples (o, φ, o′), where o ∈ Ξ and o′ ∈ Ξ′ and
φ : αo → α′o′
is biholomorphic. Denote the collection of all such tuples by M(Ξ,Ξ′).We have two natural maps s, t, called source- and target-map defined onM(Ξ,Ξ′). Namely
s : M(Ξ,Ξ′)→ Ξ : s(o, φ, o′) = o.
andt : M(Ξ,Ξ′)→ Ξ : t(o, φ, o′) = o′.
In addition there is the 1-map
Ξ→M(Ξ,Ξ) : (o, αo)→ 1o := (o, Id, o),
and the inversion map
I : M(Ξ,Ξ′)→M(Ξ′,Ξ) : (o, φ, o′)→ (o′, φ−1, o).
Finally for three uniformizing families Ξ,Ξ′,Ξ′′ we obtain the multiplicationmap defined on the obvious fibered product:
M(Ξ′,Ξ′′)s×tM(Ξ,Ξ′)→M(Ξ,Ξ′′) :
m((o′, ψ, o′′), (o, φ, o′)) = (o, ψ φ, o′′).
78

The following crucial theorem is a repacking of the classical Deligne-Mumfordtheory and is a consequence of Theorem 4.34 and implicit function type the-orems, which can be viewed as ’baby-versions’ of the implicit function the-orems in polyfold theory. Recall that we have equipped any uniformizingfamily Ξ with the unique holomorphic manifold structure making the pro-jection Ξ→ O biholomorphic. Then the following holds:
Theorem 4.35. If Ξ and Ξ′ are uniformizing families then M(Ξ,Ξ′) hasa natural holomorphic manifold structure for which the source and the targetmap are locally biholomorphic maps. In addition the 1-map and the inversionmap associated to the two uniformizing families are holomorphic. Given athird uniformizing family the multiplication map is holomorphic. In additionthe map
M(Ξ,Ξ′)s×t−−→ Ξ× Ξ′
is proper.
We refer the reader to a derivation of the DM-theory along the lines justpresented to the upcoming text [26].
The construction of a holomorphic orbifold structure via the Lie groupoidproceeds as follows. We start with a definition and the reader should noticethe parallels with the the definition of polyfolds.
Definition 4.36. Let Z be a second countable paracompact topologicalspace. An orbifold structure on Z is given by a pair (X, β), where X is anetale proper Lie groupoid and β : |X| → Z is a homeomorphism.
The notion of equivalence of orbifold structures is similar to that of theequivalence of polyfold structures. Every Ng,k for 2g+ k ≥ 3 is compact andN is the disjoint union of theNg,k. Having fixed (g, k) we find by compactnessfinitely many Ξ1, ..,Ξℓ so that their images under p cover Ng,k. Doing thisfor all pairs (g, k) we find a countable family Ξi, i ∈ N so that the associatedp-images are a locally finite covering. Then let X be the disjoint union of allΞi. This defines a complex manifold. Then define X as the disjoint unionof all M(Ξi,Ξj), where i, j ∈ N, which again defines a complex manifold.Clearly X is a groupoid in the obvious way and the source and target mapsare surjective locally biholomorphic maps. Moreover, all the structure mapsare holomorphic. Also X is proper, and summarizing we have constructed aholomorphic etale proper Lie groupoid. The maps p induce a map X → N
79

by o → [α(a,v)] which induce a homeomorphism |X| → N . Hence we haveconstructed a holomorphic orbifold structure on N . This is the classicalholomorphic orbifold structure of N .
If we change in the plumbing construction the gluing profile and useinstead of ϕ(r) = − 1
2πln(r) the exponential gluing profile ϕ(r) = e
1r − e we
obtain analogously a smooth orbifold structure for N , which however is notholomorphic, but has a natural orientation. We refer the reader to [26] forthe construction. Let us denote this orbifold by N e and the classical oneby NDM . Presumably both spaces are diffeomorphic orbifolds with even anatural family of diffeomorphisms (homotopic to the identity) between them.But so far this has not been proved yet. Let us add that the topologicalconsiderations aboutN are covered in Hummel’s book [33]. The constructionof the complex orbifold structure on N (more precisely a version were themarked points are numbered) from a more geometric points of view canalso be found in a recent paper by Robbin and Salamon, [39], [40]. In thecontext of the exponential gluing profile the Definition 4.33 is replaced bythe following modification, the plumbing construction being based on theexponential gluing profile.
Definition 4.37. We denote by (S, j,M,D) a stable element and con-sider a family (a, v) → α(a,v) defined for (a, v) ∈ O ⊂ N × E, where O isan open G-invariant neighborhood of (0, 0), constructed from a good familyv → j(v) and a small disk structure D so that the following properties holdtrue:
1) The set U = [α(a,v)] | (a, v) ∈ O is open in N .
2) The map p : O → U : (a, v) → [α(a,v)] induces a homeomorphismG\O→ U .
3) If there exists an isomorphism φ : α(a,v) → α(a′,v′), where (a, v), (a′, v′) ∈O, then there exists a g ∈ G with (a′, v′) = g ∗ (a, v) and φ = ga.
4) The partial Kodaira differentials for (a, v) ∈ O, say
PDj(a, v) : N(a)×E → H1(α(a,v))
are linear isomorphisms.
80

We end this subsection with a very useful discussion about smooth fam-ilies of stable Riemann surfaces and their equivalent representation via auniformizing family. To be precise, assume we are given a stable Riemannsurface β = (T, k,N, F ) which represents a class [β] ∈ N . Now consider anysmooth family w → Nw, which associates to a parameter value w in somefinite dimensional smooth space W a deformation Nw of N = Nw0 , wherew0 ∈W . Here smoothness means that locally we can parameterize the pointsindividually by smooth maps. Of course, the points are assumed to stay dif-ferent. Then assume that we have fixed for every nodal points a disk Dz withsmooth boundary so that the plumbing construction can be carried out. Wedo not require any compatibility with the automorphism group of β. Let |D|be the union of all such disks. We assume that Nw ∩ |D| = ∅. Finally weassume that we are given a smooth family of complex structures k(w) withk(w0) = k which is constant over |D|. Then we obtain a family
(b, w)→ (Tb, k(w)b, N(w)b, F ) =: β(b, w).
Finally let Ξ be a uniformizing family
(a, v)→ α(a,v) = (Sa, j(a, v),Ma, Da), (a, v) ∈ O
so that there exists an isomorphism
φ : β(b0,w0) → α(a0,v0).
Then the following result holds:
Theorem 4.38 (Universal Family Property). There exists a smooth germOp(W,w0)→ (O, (a0, v0)) of map
(b, w)→ (a(b, w), v(b, w))
and a germ of core-smooth family (defined below)
(b, w)→ φ(b,w) (with φ(b0,w0) = φ)
satisfyingφ(b,w) : β(b,w) → α(a(b,w),v(b,w)).
81

The interpretation is of course clear and justifies calling it a ’UniversalFamily Property’. The universal family is our uniformizer. Given a smooth(local) family, i.e. (b, w) → β(b,w) so that a member (β(b0,w0)) is isomorphicto a member of the universal family α(a0,v0), then up to ’smoothly varying’isomorphism it can be realized by a suitable pull-back of the universal family,namely
(b, w)→ α(a(b,w),v(b,w)).
Let us define what we need by core-smooth family. Assume that besidesthe family (b, w) → β(b,w) we have the smooth family (b′, w′) → β ′
(b′,w′) con-structed in a similar way. Given the family of isomorphisms
φ(b,w) : β(b,w) → β ′(b′(b,w),w′(b,w)),
where (b, w) → (b′(b, w), w′(b, w)) are smooth maps it, of course, does notmake sense to say that family is smooth since the domains are varying. Nev-ertheless if we fix a point z ∈ T(b,w) which is not a nodal point then its imagez′ under φ(b,w) is not a nodal point of T(b′(b,w),w′(b,w)). If z is in the core, aneighborhood can be canonically identified with a neighborhood of z viewedas a point in T . If it does not belong to the core we find a nodal pair x, yand can identify it either with a point in Dx \ x or Dy \ y. The samealternative holds for z′. Via these identification the family φ(b,w) provides uswith a germ of local diffeomorphisms defined on a neighborhood of z in Tand z′ in T ′. Being core-smooth requires these maps to be smooth in theusual sense for all possible choices of z (avoiding nodal points).
4.4 An Illustration of the Transversal Constraint Con-struction
The following example isolates some important features of the polyfold con-struction in Gromov-Witten and symplectic field theory.
Denote by (Q,ω) a closed symplectic manifold. We consider tuples (S, j, u)where (S, j) is a closed simply-connected Riemann surface (i.e. a model forthe Riemann sphere) and u : S → Q a map of Sobolev class H3(S,Q) satis-fying
∫
S
u∗ω > 0. (19)
82

In view of this integral condition there exist points z ∈ S such that Tu(z) isinjective.
Of interest for us will be the space Y of equivalence classes [S, j, u], wheretwo triple (S, j, u) and (S ′, j′, u′) are called equivalent provided there existsa biholomorphic map φ : (S, j) → (S ′, j′) with u′ φ = u. Of course, this isa special case of the space Z introduced in Subsection 4.1 we are ultimatelyinterested in. The space Y carries a natural topology. In order to constructthis topology we will construct a basis V, consisting of suitable subsets of Y .Recall that a basis has the following two properties:
• Given any [α] ∈ Y there exists a V ∈ V with [α] ∈ V .
• Given any element [α] ∈ V1∩V2, where V1, V2 ∈ V there exists a V3 ∈ Vsuch that
[α] ∈ V3 ⊂ V1 ∩ V2.
The topology T associated to a basis V consists then of all sets which can bewritten as a union of sets in V. We construct V as follows. For [α] ∈ Y picka representative α = (S, j, u). Then fix an open C∞-neighborhood U of jin the space of smooth almost complex structures on S (which of course areintegrable since dim(S) = 2) and an open neighborhood W of u ∈ H3(S,Q).Define
V (α, U,W ) = [S, k, w] ∈ Y | k ∈ U, w ∈ W.The collection of all these sets we denote by V.
Proposition 4.39. The collection V is the basis for a topology.
Proof. Assume that [α] ∈ V (α′, U ′,W ′) ∩ V (α′′, U ′′,W ′′). Then we mayassume with α = (S, j0, u0) that
[S, j0, u0] = [S ′, k′0, u′0] = [S ′′, k′′0 , u
′′0],
where k′0 ∈ U ′(j′), k′′0 ∈ U ′′(j′′), u′0 ∈ W ′ and u′′0 ∈ W ′′. If φ′0 : (S, j0, u0) →
(S ′, k′0, u′0) and φ′′
0 : (S, j0, u0) → (S ′′, k′′0 , u′′0) are isomorphisms, it is clear,
that if U(j0) and W (u0) are small enough that the push forwards by φ′0 and
φ′′0 respectively satisfy (φ0)∗U(j0) ⊂ U ′(j′0) and (φ0)∗(W (u0)) ⊂ W (u′0) and
similarly for φ′′0. Hence
V (α, U(j0),W (u0)) ⊂ V (α′, U ′(j′0),W (u′0)) ∩ V (α′′, U ′′(j′′0 ),W ′′(u′′0)).
83

Of course, by construction we can start with any [α] to build a set V ∈ Vwith [α] ∈ V . This shows that V is a basis for a topology T .
We call T the Sobolev H3-topology on Y . Let us show next that thetopology has certain additional properties.
Theorem 4.40. The Sobolev H3-topology on Y is second countable andparacompact.
Proof. Consider the standard Riemann sphere (S2, i). The Hilbert spaceH3(S2,RN) is separable. As a smooth manifold we may assume that Q isembedded in RN implying that H3(S2, Q) is separable as well. Thereforewe can take a dense sequence (uk). We claim that the sequence ([S2, i, uk])is dense in Y . Indeed, pick an arbitrary element in Y . It clearly can berepresented by an element of the form (S2, i, u). We find a subsequence(S2, i, ukℓ
) so that ukℓ→ u in H3. Hence given any V ((S2, i, u), U(i),W (u))
we see that for large ℓ we have
(S2, i, ukℓ) ∈ V ((S2, i, u), U(i),W (u)).
This shows that the topology has a dense sequence. We also note that every[α] has a countable neighborhood basis. Indeed, there exists for every smoothcomplex structure j on S a decreasing sequence Uk(j) so that for every U(j)there exists a k with Uk(j) ⊂ U(j) (Note that the space of smooth almostcomplex structures on S is a separable metrizable space.). Finally recall thata topological space A, admitting a countable dense set, where every pointhas a countable neighborhood basis is second countable. This shows that Yis second countable. The topology T is Hausdorff. Indeed, if [α] 6= [α′], letα = (S2, i, u) and α′ = (S2, i, u′). Take 1
k-neighborhoods (in H3(S2, Q) ⊂
H3(S2,RN)) around u and u′ respectively, say Bk(u) and Bk(u′). Then define
Vk = V (α, Uk(i), Bk(u)) and V ′k = V (α′, Uk(i), Bk(u
′)).
We show that for large k we have Vk ∩ V ′k = ∅. Arguing indirectly we find
sequences uk → u, u′k → u′, jk, j′k → i and isomorphisms
φk : (S2, jk, uk)→ (S2, j′k, u′k).
Using that u and u′ have somewhere an injective derivative implies imme-diately that the gradient of φk stays bounded (We leave this as an exercise!
84

It is a nice warm-up towards Gromov compactness, see the original paperby Gromov, [13], and the detailed presentation by [33]. As a preparationtowards Volume II one can continue with the compactness proof for SFT,[3], and for extending some of the polyfold constructions in Volume II tothe relative case one should continue with [1]). Hence, using that the com-plex structures converge in C∞, after taking a suitable subsequence we mayassume that φk → φ in C∞, where
φ : (S2, j, u)→ (S2, i, u′)
giving the contradiction [α] = [α′]. At this point we know that the topologyis Hausdorff and second countable. A well-known topological result saysthat a second countable Hausdorff space which also is completely regular isalso paracompact. Hence we are done if we can show that our topology iscompletely regular, i.e. given a point [α] ∈ Y and an open neighborhood V of[α] there exists a continuous real-valued map β : Y → [0, 1] with β([α]) = 0and β(y) = 1 if y 6∈ V . Hence the proof will be completed provided thefollowing lemma has been proved.
Lemma 4.41. The second countable Hausdorff space (Y, T ) is completelyregular.
The proof is given after Proposition 4.49.If we compare our space Y with Z, we have stripped away the occurrence
of nodes and concentrate on the idea how to deal with morphisms. Here thefollowing issue arises which has to be dealt with in our groupoid approach ina way similar to slice theorems in the theory of group actions. The difficulty,however, is that we have a lack of (ordinary) smoothness which prevents usto use the implicit function theorem. To be more precise, we observe thatany two triples of the form (S2, i, u φ) are isomorphic, where (S2, i) is thestandard Riemann sphere and φ is a Moebius transformation. What becomesapparent is that a description of the equivalence classes near a given class[S, j, u] would require some kind of slice theorem, where we divide out bythese transformations. The structure we would like to capture is, of course,the automorphism group of (S, j, u), i.e. all biholomorphic φ : (S, j)→ (S, j)such that u φ = u and more generally the structure of automorphismsfor close by elements (S ′, j′, u′). Not surprisingly the use of ep-groupoids isprecisely what one needs to describe this. In our case, without the problemsarising through nodes, the object and morphism sets of our groupoids are in
85

fact sc-manifolds without boundaries. Such sc-manifold are build on opensubsets of sc-Banach spaces via charts with sc-smooth transition maps.
Lemma 4.42. Given a representative (S, j, u) of a class in Y the auto-morphism group G is finite. Moreover there exists a point z ∈ S such thatTu(z) : TzS → Tu(z)Q is injective.
This is an easy exercise. First derive the existence of the point z withTu(z) being injective using, of course, condition (19). We may assume that(S, j) = (S2, i), i.e. the standard Riemann sphere. Then G is a subgroup ofthe group of Moebius transformations. One precisely knows the structure ofa non-convergent sequence of such transformations. Combing this with theinjectivity of Tu(z) one can proof the lemma. The following concept will beimportant and will be generalized in the discussion of the space Z occurringin the Gromov-Witten theory.
Definition 4.43. Let α = (S, j, u) be the representative of a class in Y .A finite set Ξ of points in S is called a stabilization provided the followingholds:
1) The tangent map Tu(z) is for every z ∈ Ξ injective.
2) For every z ∈ Ξ the only element in G which fixes z is the identity.
3) The set Ξ is invariant under the action of G on S.
4) If u(z) = u(z′) for two points in Ξ, then there exists a g ∈ G withg(z) = z′.
The following result is again an exercise.
Lemma 4.44. Given a representative (S, j, u) of a class in Y and anyinteger k ≥ 0 there exists a stabilization Ξ with ♯Ξ ≥ k.
Starting with a representative (S, j, u) we fix a stabilization Ξ which hasat least three elements. This is a requirement connected to the fact thatthe subgroup of the group of Moebius transformations mapping a set of atleast three points into itself is finite. Recall that a Moebius transformationfixing at least three points is the identity. Of course there are precisely sixtransformations permuting these points.
86

Having fixed the stabilization Ξ consider (S, j,Ξ) which is a stable Rie-mann surface. Its automorphism group G∗ contains G as a subgroup. Fromour discussion about Deligne-Mumford we find a good uniformizing family
v → (S, j(v),Ξ), v ∈ O,
where O is an open neighborhood of 0 ∈ E and E is equipped with thenatural G∗-action. Observe that this is a very special case of Definition 4.37in which also the plumbing construction was used (Also dealing with nodes!).That means our family has the following properties:
1) E is a complex vector space with the natural G∗-action and O ⊂ Eis an invariant open neighborhood of 0 ∈ E. The family v → j(v) iscomplex, effective and symmetric.
2) If there exists an isomorphism
φ : (S, j(v),Ξ)→ (S, j(v′),Ξ)
then φ ∈ G∗ and v′ = φ ∗ v.
3) The set U = [S, j(v),Ξ] | v ∈ O is open in N and the map p : O →N : p(v) = [S, j(v),Ξ] induces a homeomorphism G∗\O→ U .
For further constructions some compactness statements are very impor-tant. As a warm-up we prove the following lemma.
Lemma 4.45. There exists an G∗-invariant open neighborhood O∗ of 0with cl(O∗) contained in O, so that the existence of an isomorphism φ :(S, j(v), u) → (S, j(v′), u) for v, v′ ∈ cl(O∗) implies φ ∈ G. In particularφ ∗ v = v′.
Remark 4.46. The philosophy is the following. Starting with (S, j, u) thestabilization set Ξ incorporates some of the features of the map u (Recall thatΞ consists of points where Tu is injective. These are the points responsiblefor the finiteness of the automorphism group of (S, j, u).). Then considering(S, j,Ξ) instead of (S, j, u) we might get a slightly bigger automorphism groupG∗. Of course, an important benefit is that we understand the neighborhoodof (S, j,Ξ) via Deligne-Mumford theory. Indeed we have a good uniformizingfamily v → (S, j(v),Ξ). Then replacing Ξ by u we obtain the ”stability” of
87

the automorphism group G in the sense that (S, j(v), u) and (S, j(v′), u) canonly be isomorphic by an element in G, assuming that v and v′ are smallenough. As we shall see later this stability will be retained even if we deformu in a suitable way.
Proof. We can fix for every z ∈ Ξ a disk-like open neighborhood B(z) suchthat u|B(z) is an embedding. Arguing indirectly we find sequences vk, v
′k → 0
and a sequence of isomorphisms φk : (S, j(vk), u) → (S, j(v′k), u) so thatφk 6∈ G. Using that Tu(z) is injective for some point z ∈ S it is an easyexercise that the gradient of φ (fix any Riemannian metric on S) is bounded.(The argument roughly goes like this. A priori the φk behave like a family ofMoebius transformations. Such a family could in principle by non-compact.However, there is only one way to be non-compact from which one can de-rive a contradiction to the injectivity of Tu(z) at some z.). Hence, afterperhaps taking a subsequence we may assume that φk → φ in C∞, whereφ : (S, j, u) → (S, j, u) is an isomorphism. Clearly this means that φ ∈ G.With other words φk → g for some g ∈ G in C∞. Fix z ∈ Ξ. Then
u φk(z) = u(z)
and φk(z) is close to g(z) for large k. Since u|B(g(z)) is an embedding andφk(z) is close to g(z) we must have for large k that
φk(z) = g(z) for all z ∈ Ξ.
This implies that φk ∈ G∗ for k large. Since in addition φk → g ∈ G in C∞
it follows, since G∗ is finite that φk ∈ G for large k giving a contradiction.Summarizing we have shown the existence of a G∗-invariant open neigh-
borhood O∗ of 0 ∈ O with cl(O∗) ⊂ O, so that the existence of an isomor-phism φ : (S, j(v), u) → (S, j(v′), u) for v, v′ ∈ O∗ implies that φ = g ∈ Gfor some g. We know that g : (S, j(v),Ξ)→ (S, j(v′),Ξ) is an isomorphism.Since w → (S, j(w),Ξ), w ∈ O, is a good uniformizing family we have thatv′ = φ ∗ v. This proves our lemma.
Let us assume that S is equipped with a G∗-invariant metric d. Thisallows us to define for two diffeomorphisms φ1, φ2 of S their distance
ρ(φ1, φ2) = supd(φ1(z), φ2(z)) | z ∈ S.Denote by ε∗ > 0 half of the minimal distance two different elements in G∗
have. Using the previous compactness assertions we can derive the followingresult.
88

Proposition 4.47. With the data just prescribed there exists for givenε ∈ (0, ε∗) a C0-neighborhood U(u) in C0(S,Q) so that given u1 and u2 inU(u) and v1, v2 ∈ O∗ the existence of a biholomorphic map
φ : (S, j(v1))→ (S, j(v2))
with u1 = u2 φ implies the existence of a uniquely determined g ∈ G withρ(φ, g) < ε.
Proof. Let us first show that the distance of such a φ to G is smaller than ε >0 provided U(u) is small enough. Arguing indirectly we find sequences uk,u
′k
converging to u in C0 and vk and v′k converging to some v, v′ ∈ cl(O∗) ⊂ Oand φk with
φk : (S, j(vk))→ (S, j(v′k))
being biholomorphic and u′k φk = uk. In addition, however, the distance ofφk from G is at least ε. We leave it again as an exercise that after taking asubsequence we may assume that φk → φ in C∞. Hence, passing to the limitwe see that
φ : (S, j(v))→ (S, j(v′))
is biholomorphic and u φ = u. But this means that φ ∈ G giving acontradiction. Hence such a C0-neighborhood U(u) exists. If now u1, u2 ∈U and v1, v2 ∈ O∗, the existence of an isomorphism φ : (S, j(v1), u1) →(S, j(v2), u2) implies that the distance of φ to G is strictly less than ε. Bythe definition of ε∗ this implies the existence of a unique g ∈ G with ρ(φ, g) =distance(φ,G).
In the next step we utilize the transversal constraint construction. DefineW = u(Ξ). The map u : Ξ → W has by construction the property that thepreimage of a point w is a G-orbit of a point in Ξ.
To proceed with our construction we fix for every w ∈ W a bijectivesmooth chart
φw : (R(w), 0)→ (R2n, 0),
such that the closures of the various domains are mutually disjoint. Wedenote for r > 0 by Rr(w) the preimage of the Euclidean r-ball. We equipQ with Riemannian metric g which over every R4(w) is the pull-back of thestandard Euclidean metric by φw.
Let us observe that for every w ∈ W and u(z) = w, z ∈ Ξ, the imageof Tu(z) is independent of the choice of z. Indeed if u(z) = u(z′) then by
89

construction there exists a g ∈ G such that g(z) = z′. Since u g = u itfollows that
Tu(z)TzS = Tu(g(z))Tg(z)TzS = Tu(z′)Tz′S.
Let us fix for every w the g-orthogonal of the image of Tu(z) which we denoteby Hw ⊂ TwQ. We define an associated codimension submanifold Mw of Qby the formula
Mw = φ−1w (Tφw(w)Hw).
Then Mw is properly embedded in R(w) and at least the part contained inR2(w) is totally geodesic. We observe that u : S → Q at a point z ∈ Ξ hasthe following property. Restricted to a sufficiently small open neighborhoodU(z), z ∈ Ξ, the restriction u|U(z) : U(z) → Q is an embedding which isdisjoint from every Mw as long as w ∈ W \ u(z) and moreover u|U(z)intersects Mu(z) at precisely one point, namely at z and this intersection istransversal.
Having these submanifolds Mw in place we continue with our construc-tion. We fix for every z ∈ Ξ a closed disk-like open neighborhoodDz centeredat z with smooth boundary such that the following holds
1) We have u(Dz) ⊂ R1(u(z)).
2) u : Dz → Q is an embedding.
3) If u(y) ∈Mu(z) and y ∈ Dz, then y = z.
4) Any two disks are mutually disjoint and the union of the disks is in-variant under the action of the automorphism group G.
Denote by exp the exponential map associated to g. We observe that ifu ∈ R1(w) and ξ ∈ TuQ with |ξ| ≤ 1, then expu(ξ) ∈ R2(w). Indeed,
φw(expu(ξ)) = φw(u) + Tφw(u)ξ ∈ B2(0) ⊂ R2n.
We find an open neighborhood O of the zero-section in TQ, which is fiber-wise convex, so that the restriction of exp to Oq := TqQ∩O is an embedding.We assume in addition that O is fiber-wise contained in the 1-ball in TqQ.
Given (S, j, u) we carry out the construction as above. We can build thepull-back u∗TQ and denote by H3(u∗TQ) the space of sections of Sobolevclass H3 along u. Let us observe that if u is only of class H3 we cannot talk
90

about smooth sections of u∗TQ → S. Denote by Fu the finite codimensionsubspace of H3(u∗TQ) defined by
Fu = η ∈ H3(u∗TQ) | η(z) ∈ Hu(z), z ∈ Ξ.Pick any convex open neighborhood B of 0 ∈ Fu which has the followingproperties, where 0 < ε < ε∗ and ε is so small that d(z′, z) < ε for z ∈ Ξ (dwas the metric on S) and z′ ∈ S implies that z′ ∈ Dz:
1) For η ∈ B we have η(s) ∈ Ou(s) for all s ∈ S. Moreover |η(s)| < 1 forall s ∈ S.
2) expu(η) ∈ U(u), where U(u) is given by Proposition 4.47 for the ε justdescribed.
3) For every η ∈ B the map expu(η) restricted to any Dz with z ∈ Ξ isan embedding intersecting Mu(z) at exactly one point in Dz which thenhas to be z. Moreover, this intersection is transversal.
Let us make some remarks about these conditions. The condition |η(s)| < 1is connected to the fact that we need to use the special properties of the expo-nential map on the disks Dz. Condition 2) is needed to have the compactnessproposition at our disposal. Now we consider the family
(v, η)→ (S, j(v), expu(η)), (v, η) ∈ O∗ ⊕B.In principle this should be our uniformizing family for Y centered at (S, j, u)playing a role analogously to such families in the Deligne-Mumford theory.There is, however, the subtlety here which makes it necessary to change theconstruction. The map u is only of class H3. Hence u∗TQ → S is not asmooth bundle and consequently Fu does not admit any obvious and usefulsc-structure since it does not make sense to talk about sections with betterregularity than Sobolev-class H3. However, there is a certain stability inthe construction since most of the relevant properties are controlled by theC0-topology on maps (on S) and the C1-topology on the disks Dz. Namelywe note the following proposition which is quite obvious.
Proposition 4.48. Let (S, j, u′) be a representative of a class in Y . Thenthere exists a smooth u : S → Q which is H3-close to u′ such that theassociated family
(v, η)→ (S, j(v), expu(η)), (v, η) ∈ O∗ ⊕ B
91

satisfies that [S, j, u′] = [α(v0,η0)] for some (v0, η0) ∈ O∗ ⊕ B.
Proof. We carry out our construction above for (S, j, u′). In the space of Fu′we can consider the subspace of all sections which are G-invariant such thatη(z) = 0 for z ∈ Ξ and the linearisation η′(z) = 0 for z ∈ Ξ vanishes as well.There are such sections which are arbitrarily small such that u = expu(η) issmooth. By construction u is invariant under the G-action and u(z) = u′(z)and Tu(z) = Tu′(z) for all z ∈ Ξ. Then Ξ is a stabilization for (S, j, u) andwe can use the other elements of the construction. If just η is small enoughour assertion trivially holds.
At this point we have shown that given any (S, j, u′) representing a class inY we can find a smooth (S, j, u) so that the previously described constructioncan be carried out, resulting in a family
(v, η)→ (S, j(v), expu(η))
so that (S, j, u′) is isomorphic to some element in the image of the family.Let us denote such a family by Γ and call it a good uniformizing family. Wealso write Γ for its graph, i.e.
Γ = (v, η, α(v,η)) | (v, η) ∈ O∗ ⊕ B.
Observe that Fu admits the sc-structure where levelm corresponds to Sobolevclass 3+m. We equip Γ with the M-polyfold structure so that the projectionmap
Γ→ O∗ ⊕Bis a sc-diffeomorphisms. We note that we have a natural map
p : Γ→ Y : p(v, η, α(v,η)) = [α(v,η)].
By our discussion the images of all such p-maps cover Y .
Proposition 4.49. The map p is continuous and open and, with U beingits image, induces a homeomorphism G\(O∗ ⊕B)→ U .
Proof. The continuity of p is clear. Assume next that φ is an isomorphism
φ : α(v,η) → α(v′,η′),
92

where (v, η), (v′, η′) ∈ O∗ ⊕ B. Then there exists a unique g ∈ G such thatρ(φ, g) < ε. This in particular implies that for z ∈ Ξ we have φ(z) ∈ Dg(z).Hence
(expu(η′)) φ(z) = expu(η)(z) ∈Mu(z).
Since φ(z) ∈ Dg(z) we see that φ(z) = g(z) since expu(η′) intersects Mu(g(z)) =
Mu(z) only at the point g(z). Hence φ belongs to G∗ but is in ε-distance toG. This implies φ ∈ G. Hence
φ : (S, j(v),Ξ)→ (S, j(v′),Ξ)
is an isomorphism implying that v′ = φ ∗ v. At this point we have shownthat p induces a bijection
G\(O∗ ⊕ B)→ U .
Next we show that this is a homeomorphism. Assume that [T, k0, w0] ∈ U .Hence we can find (v0, η0) ∈ O∗ ⊕B and an isomorphism
φ0 : (T, k0, w0)→ α(v0,η0).
Consider (T, k, w) where k is C∞-close to k0 and w is H3-close to w0. Themap (k, w)→ [T, k, w] into Y is continuous by the definition of the topology.Denote by Θ0 the preimage of Ξ under φ0. Then w0 at φ−1
0 (z) is transversalto Mu(z). If we deform w0 to w in H3 the intersection points Θw changecontinuously from Θ0 = Θw0 . By the universal family property there existsa continuous map
(k,Θ)→ v(k,Θ)
with v(k,Θ0) = v0 and a continuous family (k,Θ)→ φ(k,Θ) with φ(k0,Θ0) = φ0
such thatφ(k,Θ) : (T, k,Θ)→ (S, j(v(k,Θ)),Ξ)
are isomorphisms. Now observe that
w φ−1(k,Θw)(z) ∈Mu(z)
for z ∈ Ξ andΦ : (k, w)→ w φ−1
(k,Θw)(z) ∈ Mu(z)
as map into Fu is continuous with Φ(k0, w0) = η0. This proves the desiredresult.
93

As a corollary we obtain that T is completely regular. Indeed, let y ∈ Ybe a point and U(y) an open neighborhood. We find a family (v, η) →(S, j(v), expu(η)) as described above having y in the image of the p-map.Let y = p(v0, η0). Consider the orbit of (v0, η0) under G. We can define acontinuous map O∗ ⊕ B → [0, 1] which vanishes at the points in G ∗ (v0, η0)and is outside of a small neighborhood of G∗(v0, η0), whose closure in E⊕Fuis contained in O∗⊕B, identical to 1. Now we average with respect to G andobtain a continuous map which descends to a continuous map on G\(O∗⊕B).This can be pushed forward by a homeomorphism onto some open subset Uand extended continuously by 1 to Y \ U . Hence the proof of the followingproposition is completed.
Proposition 4.50. The topological space Y is a second countable para-compact Hausdorff space.
In the next step we have to compare two such good uniformizing families.Call these families Γ and Γ′. Assume that
φ : α′(v′0,η
′0) → α(v0,η0)
is an isomorphism. We can use the above argument to obtain for (v′, η′)near to (v′0, η
′0) a continuous map (v′, η′)→ (v, η) = (v(v′, η′), η(v′, η′)) and a
family (v′, η′)→ φ(v′,η′) of isomorphisms
φ(v′,η′) : α′(v′,η′) → α(v,η).
Let us consider the map(v′, η′)→ (v, η)
in more detail. It has the following form. For η′ near η′0 we consider thedeformation Θη′ of Θ = φ−1
0 (Ξ) obtained as the intersection points with theMu(z). The map
η′ → Θη′
is sc-smooth which follows from the discussion about transversal constraints(Here of course we mean that every point in Θη′ depends sc-smoothly on η′.).Using the universal family property we obtain for Θ near Θ0 a smooth family(v′,Θ)→ φ(v′,Θ)
φ(v′,Θ) : (S ′, j′(v′),Θ)→ (S, j(v(v′,Θ)),Ξ),
94

where v is depending smoothly on v′ and Θ. Then we define η = η(v′, η′) by
η = exp−1u ((exp′
u′(η′)) φ−1
(v′,Θη′)).
Let us verify that this map
(v′, η′)→ (v, η)
is sc-smooth. This will imply then that the ”transition map” (v′, η′)→ (v, η)is sc-smooth. The above map can be viewed as the composition of severalsc-smooth maps. First of all we associate to (v′, η′) the triple (v′,Θη′ , η
′).We already now that η′ → Θη′ is sc-smooth. If we consider a deformationΘ of Θ0, then we know by the universal family property that there existsa smooth map (v′,Θ) → v(v′,Θ) and a smooth family of diffeomorphisms(v′,Θ)→ φ(v′,Θ)
φ(v′,Θ) : (S ′, j′(v′),Θ)→ (S, j(v(v′,Θ)),Ξ)
so that η is computed from the identity
expu(η) = exp′u′(η
′) φ−1(v′,Θη′)
.
We may assume that Q is embedded in some RN as a smooth submanifold.Then the map
η′ → exp′u′(η
′)
is by standard results smooth as a map Hm((u′)∗TQ) → Hm(S ′,RN) forall m ≥ 2 which of course implies that it is sc-smooth for the obvious sc-structures. The basic question is then if the following map is sc-smooth.
Let H be an open subset of some Euclidean space and h→ φh a smoothfamily of diffeorphisms φh : S → S, where S is a closed surface. Assume thatE := H3(S,RN) is equipped with the sc-structure where level m correspondsto regularity m+3. The following result about diffeomorphism group actionsis important.
Proposition 4.51. The map H ⊕E → E defined by
(h, u)→ u φh
is sc-smooth.
95

The proof will be given later in Subsection 5.4. Using this proposition itis obvious that the transition map studied above is sc-smooth.
Given good uniformizing families Γ and Γ′ define M(Γ,Γ′) to consist of alltriple ((o, αo), φ, (o
′, α′o′)), where φ : αo → α′
o′ is an isomorphism and (o, αo) ∈Γ and similarly (o′, α′
o′) ∈ Γ′. We can equip M(Γ,Γ′) with a topology byidentifying it with a subset of the topological space Γ× Diff(S, S ′)× Γ′. Weequip the diffeomorphism space with the C∞-topology.
We define in the obvious way the source map s : M(Γ,Γ′) → Γ and thetarget map t : M(Γ,Γ′)→ Γ′.
Proposition 4.52. The source and target maps are local homeomor-phisms.
Assume this is proved. Then M(Γ,Γ′) carries in a natural way a M-polyfold structure. Indeed, pick any point in this space, say (o0, αo0 , φ0, o
′0, α
′o′0
).
Then by the previous discussion we obtain a germ of sc-smooth maps o →o′(o) and a continuous map o → φo with φo : α0 → α′
o′(o). Then o →(o, αo, φo, o
′(o), α′o′) is the local inverse which is continuous. Equip M(Γ,Γ′)
with the M-polyfold structure making s a local sc-diffeomorphism. Then itfollows immediately from the previous discussion that t s−1(o) = o′(o), asalready established, is sc-smooth. Hence t is a local sc-diffeomorphism aswell. Let us observe that we have several natural maps. The first one is
Γ→M(Γ,Γ) : γ → 1γ,
which obviously is sc-smooth since s(1γ) = γ is sc-smooth and s is a localsc-diffeomorphism. Then we have the inversion map
I : M(Γ,Γ′)→M(Γ′,Γ) : (o, αo, φ, o′, α′
o′)→ (o′, α′o′, φ
−1, o, αo).
Since we can take the source and target maps as local charts it follows from
t(I(s−1(o, αo)) = (o, αo)
that I is sc-smooth. Finally we can take for Γ,Γ′ and Γ′ the fibered productM(Γ′,Γ′′)s×tM(Γ,Γ′), which carries a natural M-polyfold structure since sand t are local sc-diffeomorphisms. Finally we can consider the multiplicationmap
m : M(Γ′,Γ′′)s×tM(Γ,Γ′)→M(Γ,Γ′)
96

and again one easily verifies that this map is sc-smooth.Now we can define a polyfold structure on Y as follows. We take a family
Γa, a ∈ A, such that p(Γa) | a ∈ A is an open covering of Y . Since Yis a second countable paracompact space we can take a countable subset A′
of A such that the associated covering still covers Y . Hence, without lossof generality we may assume that A is countable. Now, by standard resultsthere exists an open subordinated covering with the same index set whichis locally finite, say Va, a ∈ A. Take the preimage of Va under pa. Thiscorresponds to a family
(v, η)→ α(v,η),
where (v, η) lies in a suitable open subset of O∗⊕B. Taking this new familiesagain denoted by Γa, a ∈ A, we have constructed a countable family so thatthe images Ua = pa(Γa) define a locally finite covering of Y . Denote by X thedisjoint union of these Γa and by X the disjoint union of all M(Γa,Γa′). Thisdefines a small category X with morphism set X so that both sets have a M-polyfold structure for which the obvious source and target maps are surjectivelocal sc-diffeomorphisms, so that all structure maps are sc-smooth. Hence Xis etale.
We want to show that X is a polyfold groupoid. For this it suffices toprove the following:
Lemma 4.53. The map M(Γ,Γ′)(s,t)−−→ Γ× Γ′ has the following property.
For every x ∈ Γ there exists an open neighborhood U so that for every compactsubset K of Γ′ the preimage of cl(U)×K under (s, t) is compact.
Proof. If x0 ∈ Γ the set of all morphisms Φ with s(Φ) = x0 is bounded by♯G′, where G′ is the automorphism group associated to the second family Γ′.Indeed, assume we have at least one morphism Φ0 with source x0 and targetx′0. If Φ is another with source x0 we can consider Φ Φ−1
0 : x′0 → t(Φ). Thecollection of all morphisms starting at x′0 is in bijective correspondence toG′. Let x ∈ Γ be given. Recall that Γ is the graph of a map parameterizedby a set O∗⊕B, where O∗ and B are open subsets of Banach spaces. We cantake an open neighborhood of U of x which corresponds to an open subsetwhose Banach space closure also belongs to O∗ ⊕ B. Assume that K ⊂ Γ′
is compact. Consider the preimage of U × K under (s, t). Consider anysequence (Φk) ⊂ M(Γ,Γ′) with s(Φk) ∈ U and t(Φk) ∈ K. After perhapstaking a subsequence we may assume that t(Phik) → x′. Hence we have
97

sequences (vk, ηk)→ (v, η) and (v′k, η′k)→ (v′, η′) and isomorphisms
φk : (S, j(vk), expu(ηk))→ (S ′, j′(v′k), exp′u′(η
′k)).
Here (v′k, η′k)→ (v′0, η
′0) and the Banach space closure of the sequence ((vk, ηk))
lies in O∗ ⊕ B. In particular, after perhaps taking another subsequence wemay assume that vk → v0 ∈ O∗. Again one easily verifies that after perhapstaking another subsequence
φk → φ0 in C∞,
whereφ0 : (S, j(v0))→ (S ′, j′(v′0))
is a biholomorphic map. In the formula
expu(expu′(η′k) φk)−1 = ηk
we can pass to a limit on the left and see as a consequence that ηk convergesas well. This implies that (Φk) has a convergent subsequence and finishesthe proof of the lemma.
Using the fact the Ua = p(Γa) give a locally finite covering of Y it followsfrom the previous lemma that X is an ep-groupoid. The maps p : Γa → Ydefine a map p : X → Y which induces a homeomorphism β : |X| → Y .Hence (X, β) defines a polyfold structure for Y .
Assume we have made different choices Γ′a′ , a
′ ∈ A′, where the associatedU ′a′ define again a locally finite covering. From this data we obtain a second
ep-groupoid X ′ and a homeomorphism β ′ : |X ′| → Y . Hence we obtaina second polyfold structure (X ′, β ′). Both are equivalent. Indeed take thedisjoint union of both families which we denote by Γ′′
a′′ , a′′ ∈ A′′ = A
∐A′.
This gives us a third polyfold structure (X ′′, β ′′) for Y . Now observe that wehave natural inclusion functors X → X ′′ and X ′ → X ′′ which obviously areequivalences. The weak fibered product X×X′′X ′ gives a common refinementfor X and X ′ showing that these polyfold structures are equivalent. Hence
Theorem 4.54. The second countable paracompact space Y has in a nat-ural way the structure of a polyfold, where level m corresponds to Sobolevregularity m+ 3.
98




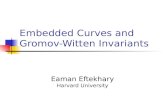






![Gromov-WittenGaugeTheory - arXivstack of K-connections on Σ, where K is the compact form of G, and so one can view our construction of Gromov-Witten invariants for [pt/C×] as a topological](https://static.fdocuments.us/doc/165x107/5e3b11469208b4764810abba/gromov-wittengaugetheory-arxiv-stack-of-k-connections-on-where-k-is-the-compact.jpg)