Cooperatively Learning Footprints of Multiple Incumbent...
23
Cooperatively Learning Footprints of Multiple Incumbent Users Mihir Laghate and Danijela Cabric 21 st April 2017 Supported by NSF Grant 1527026: Dynamic Spectrum Access by Learning Primary Network Topology
Transcript of Cooperatively Learning Footprints of Multiple Incumbent...

CooperativelyLearningFootprintsofMultipleIncumbentUsers
MihirLaghateandDanijelaCabric21st April2017
SupportedbyNSFGrant1527026:DynamicSpectrumAccessbyLearningPrimaryNetworkTopology
D. Markovic / Slide 2
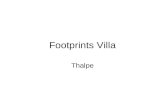
Goal:FootprintLearning
2
Incumbentusers(IUs)1T
2T
3T

D. Markovic / Slide 3
Goal:FootprintLearning
3
CognitiveRadios(CRs)
Incumbentusers(IUs)1T
2T
3T
D. Markovic / Slide 4
Goal:FootprintLearning
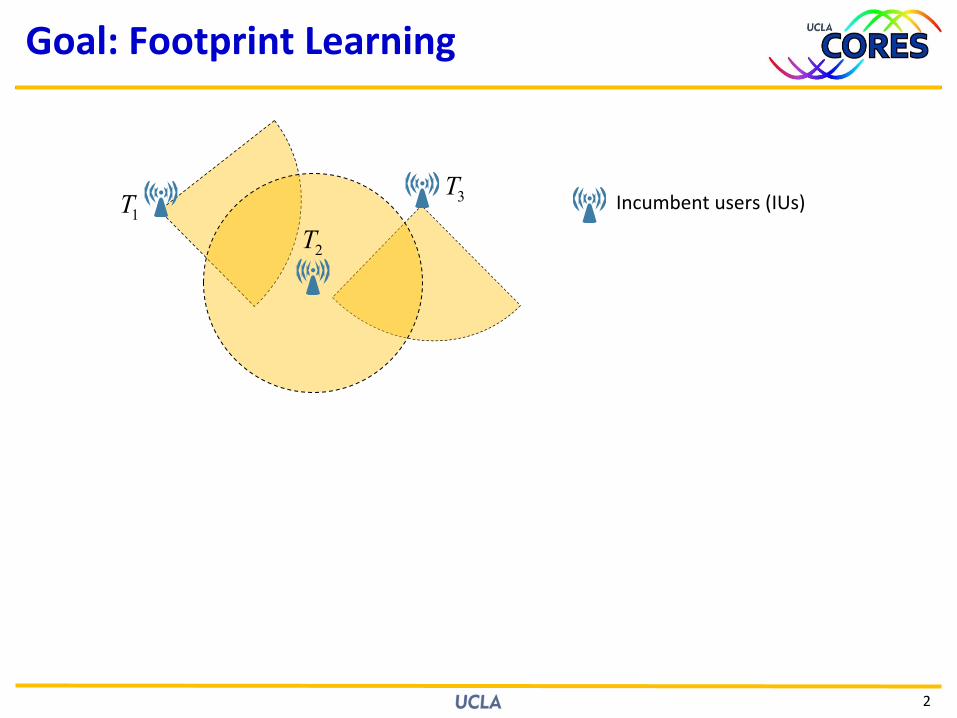
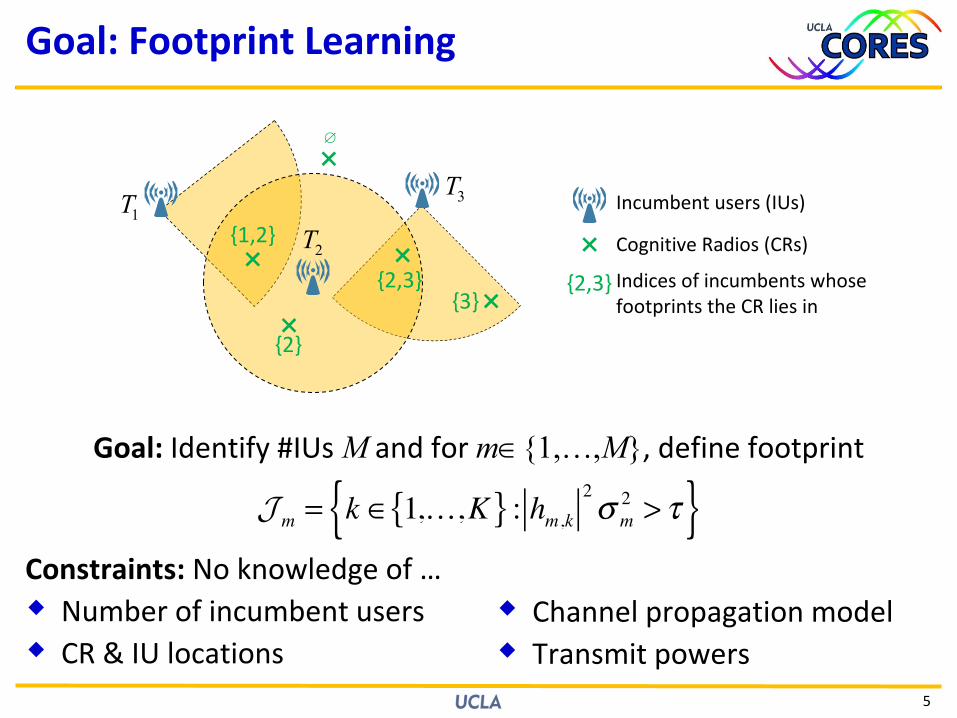
Goal: Identify#IUsM andformÎ{1,…,M},definefootprint
4
CognitiveRadios(CRs)
Incumbentusers(IUs)
{2,3} IndicesofincumbentswhosefootprintstheCRliesin
{2}
1T2T
3T
{2,3}{3}
{1,2}
∅
Jm = k ∈ 1,…,K{ } : hm,k2σ m2 > τ{ }
D. Markovic / Slide 5
Goal:FootprintLearning
Goal: Identify#IUsM andformÎ{1,…,M},definefootprint
5
CognitiveRadios(CRs)
Incumbentusers(IUs)
{2,3} IndicesofincumbentswhosefootprintstheCRliesin
{2}
1T2T
3T
{2,3}{3}
{1,2}
∅
Jm = k ∈ 1,…,K{ } : hm,k2σ m2 > τ{ }
Constraints:Noknowledgeof…w Numberofincumbentusersw CR&IUlocations
w Channelpropagationmodelw Transmitpowers

D. Markovic / Slide 6
ChallengesofDistinguishingIUs
w Anisotropicradiationpatterns– Directionalantennas– Beamforming
w Locationuncertainty
6
Incumbentusers
Example:Sectorized cellularnetwork
w Intermittenttransmissions
w Unknownnumberoftransmitters

D. Markovic / Slide 7
ChallengesofDistinguishingIUs
w Anisotropicradiationpatterns– Directionalantennas– Beamforming
w Locationuncertainty
7
Incumbentusers
Example:Sectorized cellularnetwork
w Intermittenttransmissions
w Unknownnumberoftransmitters
Don’tuselocationinformation!

D. Markovic / Slide 8
ChallengesofDistinguishingIUs
w Anisotropicradiationpatterns– Directionalantennas– Beamforming
w Locationuncertainty
8
Incumbentusers
Example:Sectorized cellularnetworkDistinguishIUs
w Intermittenttransmissions
w Unknownnumberoftransmitters
Don’tuselocationinformation!

D. Markovic / Slide 9
ExistingMethodstoLearnFootprints
9
Based on Anisotropicfootprints
SpatialOverlap
BlindtoChannel Requires
Transmission protocols[1,2] ü ü ü
PriorInformationCyclicfrequency[6] ü ü ü
Channelmodel &location[3-5] û ü û
Angle ofArrival[7,8] ü ü û MultipleAntennasReceivedenergy[9,10] ü û ü BlindDistribution ofreceivedenergy ü ü ü BlindProposedmethod

D. Markovic / Slide 10
Incumbentnetwork:w M transmittersindexed{1,…,M}w Transmitsw Fixedspatialradiationpatternw Spectrumoccupancy:am[n] = 1 iftransmitting,0 otherwise
Cognitivenetwork:w K CRreceiversw Slowfadingchannelhm,k frommth incumbenttokth CR
Receivedenergy:
w CRscancommunicatewithacentralserver
SystemModel
10
CognitiveRadios
Incumbenttransmitter
Example:Sectorized cellularnetwork
( )2[ ] ~ 0, mmx n sCN
2 2 2 2, 2
1
1~ [[ ]2
] | [ ]kk
M
m k m m Tm
h a ne n a n ns s c=
æ ö+ç ÷
è øå

D. Markovic / Slide 11
GaussianMixtureModelofRxEnergy
w Component⇔ UniquesetofIUstransmittingsimultaneouslyw M transmitters⇔ #Components= 2M
11
Example:Scatterplotofreceivedenergyat2CRsfrom2sources.Alsoshown:marginalconditionaldistributionsgiventransmitterID
2 2 2 2, 2
1
1~ [[ ]2
] | [ ]kk
M
m k m m Tm
h a ne n a n ns s c=
æ ö+ç ÷
è øå

D. Markovic / Slide 12
LearningusingSoftReports
12
SalientFeaturesw Onlinealgorithmww
Energy Detection Threshold
Noise Energy
D. Markovic / Slide 13
LearningusingSoftReports
13
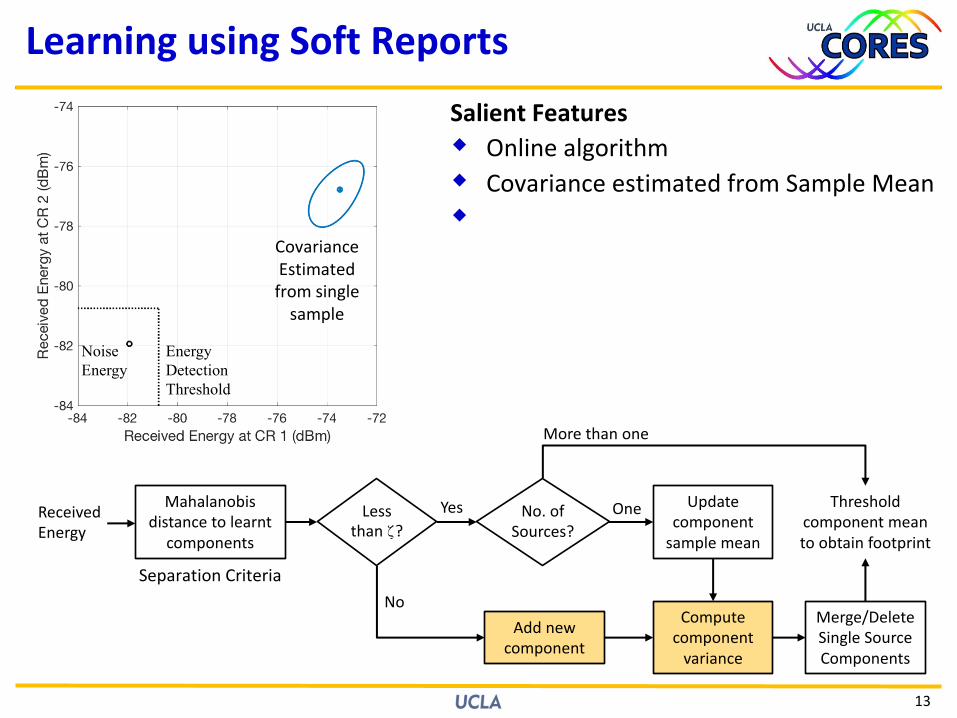
SalientFeaturesw Onlinealgorithmw CovarianceestimatedfromSampleMeanw
CovarianceEstimatedfromsinglesample
ReceivedEnergy
Mahalanobisdistancetolearnt
components
Lessthanζ?
No.ofSources?
Updatecomponentsamplemean
Thresholdcomponentmeantoobtainfootprint
Addnewcomponent
Computecomponentvariance
Merge/DeleteSingleSourceComponents
No
Yes One
Morethanone
SeparationCriteria
Energy Detection Threshold
Noise Energy

D. Markovic / Slide 14
LearningusingSoftReports
14
SalientFeaturesw Onlinealgorithmw CovarianceestimatedfromSampleMeanw
NewSourceComponent
ReceivedEnergy
Mahalanobisdistancetolearnt
components
Lessthanζ?
No.ofSources?
Updatecomponentsamplemean
Thresholdcomponentmeantoobtainfootprint
Addnewcomponent
Computecomponentvariance
Merge/DeleteSingleSourceComponents
No
Yes One
Morethanone
SeparationCriteria
Energy Detection Threshold
Noise Energy

D. Markovic / Slide 15
LearningusingSoftReports
15
SalientFeaturesw Onlinealgorithmw CovarianceestimatedfromSampleMeanwNewSample,
KnownComponent
ReceivedEnergy
Mahalanobisdistancetolearnt
components
Lessthanζ?
No.ofSources?
Updatecomponentsamplemean
Thresholdcomponentmeantoobtainfootprint
Addnewcomponent
Computecomponentvariance
Merge/DeleteSingleSourceComponents
No
Yes One
Morethanone
SeparationCriteria
Energy Detection Threshold
Noise Energy

D. Markovic / Slide 16
LearningusingSoftReports
16
SalientFeaturesw Onlinealgorithmw CovarianceestimatedfromSampleMeanw
ComponentMeanUpdated
ReceivedEnergy
Mahalanobisdistancetolearnt
components
Lessthanζ?
No.ofSources?
Updatecomponentsamplemean
Thresholdcomponentmeantoobtainfootprint
Addnewcomponent
Computecomponentvariance
Merge/DeleteSingleSourceComponents
No
Yes One
Morethanone
SeparationCriteria
Energy Detection Threshold
Noise Energy

D. Markovic / Slide 17
LearningusingSoftReports
17
SalientFeaturesw Onlinealgorithmw CovarianceestimatedfromSampleMeanw
NewSourceComponent
ReceivedEnergy
Mahalanobisdistancetolearnt
components
Lessthanζ?
No.ofSources?
Updatecomponentsamplemean
Thresholdcomponentmeantoobtainfootprint
Addnewcomponent
Computecomponentvariance
Merge/DeleteSingleSourceComponents
No
Yes One
Morethanone
SeparationCriteria
Energy Detection Threshold
Noise Energy
D. Markovic / Slide 18
LearningusingSoftReports
18
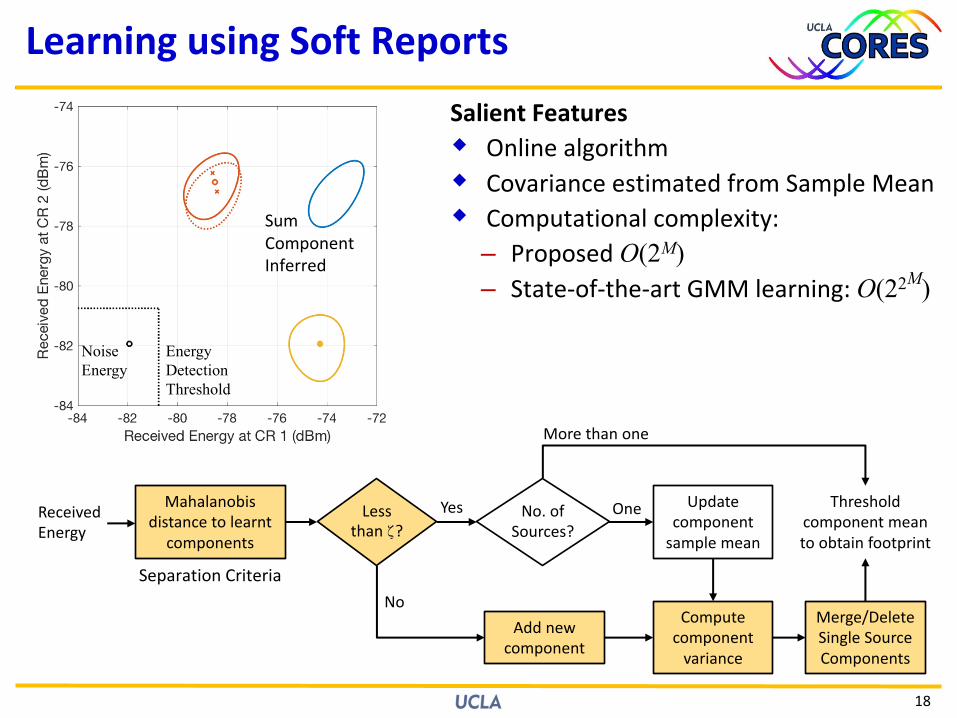
SalientFeaturesw Onlinealgorithmw CovarianceestimatedfromSampleMeanw Computationalcomplexity:– ProposedO(2M)– State-of-the-artGMMlearning:O(22M)
SumComponentInferred
ReceivedEnergy
Mahalanobisdistancetolearnt
components
Lessthanζ?
No.ofSources?
Updatecomponentsamplemean
Thresholdcomponentmeantoobtainfootprint
Addnewcomponent
Computecomponentvariance
Merge/DeleteSingleSourceComponents
No
Yes One
Morethanone
SeparationCriteria
Energy Detection Threshold
Noise Energy
D. Markovic / Slide 19
SimulationofSlottedALOHA
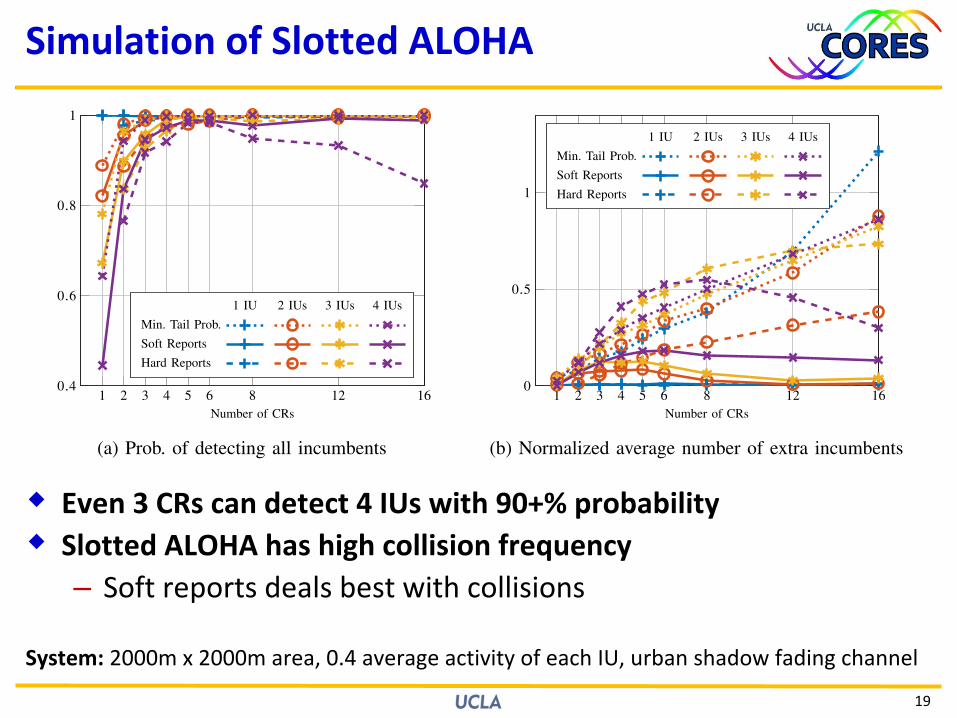
w Even3CRscandetect4IUswith90+%probabilityw SlottedALOHAhashighcollisionfrequency– Softreportsdealsbestwithcollisions
19
25
0.95 0.96 0.97 0.98 0.990.8
0.85
0.9
0.95
1
Threshold (⇣)
1 IU 2 IUs 3 IUs 4 IUsMin. Tail Prob.Soft ReportsHard Reports
(a) Prob. of detecting all incumbents
0.95 0.96 0.97 0.98 0.990
0.2
0.4
0.6
0.8
Threshold (⇣)
1 IU 2 IUs 3 IUs 4 IUsMin. Tail Prob.Soft ReportsHard Reports
(b) Normalized average number of extra incumbents
Fig. 9. Effect on detection performance when threshold ⇣ is varied from 0.95 to 0.99. Parameters: M = 1 to 4 IUs, K = 4 CRs,
0.4 average activity, N = 200 frames of T = 32 samples each.
1 2 3 4 5 6 8 12 160.4
0.6
0.8
1
Number of CRs
1 IU 2 IUs 3 IUs 4 IUsMin. Tail Prob.Soft ReportsHard Reports
(a) Prob. of detecting all incumbents
1 2 3 4 5 6 8 12 160
0.5
1
Number of CRs
1 IU 2 IUs 3 IUs 4 IUsMin. Tail Prob.Soft ReportsHard Reports
(b) Normalized average number of extra incumbents
Fig. 10. Effect on detection performance when CRs are increased from 1 to 16 for up to 4 IUs with average activity 0.4. Hard
reports algorithm not run for 1 CR system. Parameters: N = 200 frames of T = 32 samples each.
C. Assumption of Constant Channel
An important assumption in our algorithm is that the channels between IUs and CRs are
constant, i.e., the channel coherence time is greater than the time required to collect N energy
measurements. We shall now estimate the measurement time for CRs using 6MHz wide bands,
similar to IEEE 802.22 [20], and find the minimum coherence time supported by our algorithm.
Time required to collect a single energy measurement of T samples is T/6µs, i.e., 5.33µs
for T = 32. To ensure that different IUs are transmitting in different energy measurements, we
assume a fixed time interval between successive measurements. A suitable sensing time interval
depends on the medium access control protocol of the IU systems because that controls the
transmission duration and interval between successive transmissions. For the sake of argument,
if the IUs belong to the commonly used IEEE 802.11 standards, the time interval between
System:2000mx2000marea,0.4averageactivityofeachIU,urbanshadowfadingchannel
D. Markovic / Slide 20
Applications:AnisotropicAntennas
20
27
�1,000 0 1,000
�1,000
0
1,000
X-Coordinate (m)
Y-C
oord
inat
e(m
)
DBE [10]Hard ReportsTrue Footprints
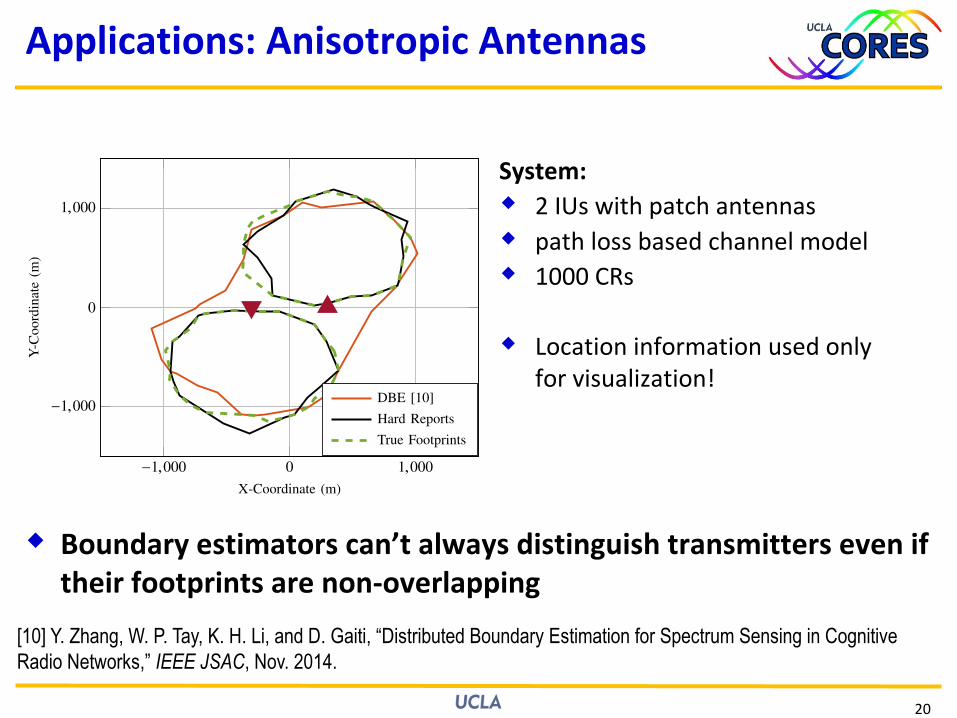
Fig. 12. Boundaries of the footprints of two IUs with patch antennas as detected by the hard reports algorithm and the DBE
algorithm proposed in [10]. Dots represent CR locations and triangles represent IU locations.
multiple 802.11n networks sharing a 20 MHz 802.11 channel in a square area of side 50m.
A simple log distance propagation loss model was used between IUs with exponent 3. 1000
network topologies were generated and simulated for 3 seconds each. By sampling the packet
traces every 150 µs, each topology provided 100 time sequences of 200 frames each. Each
network consists of 1 AP and 2 STAs. UDP flows are set up on both downlink and uplink. 2000
byte packets are generated at each radio at periodic intervals. To control the network load, these
intervals are chosen as multiples of the transmit times for an individual packet. Fig 11 shows
the performance of 6 CRs as this “load factor” is varied from 0.5 to 100. First, we note that
all three algorithms detect very few extra IUs. Secondly, the hard reports algorithm detects all
IUs with approximately the same probability as the soft reports algorithm. Both these properties
can be explained by the fewer number of collisions due to the collision avoidance mechanisms
of 802.11. Reducing number of collisions also explain why the probability of detecting all IUs
increases with increasing load factor. However, as the load factor reduces below 10, candidate
components may not get confirmed because of the low activity.
E. Comparison to Existing Work
Apart from [16], methods proposed in existing literature do not consider multiple IUs with spa-
tially overlapping footprints. For comparison on a simpler system, we implemented the distributed
boundary estimation (DBE) algorithm proposed in [10] that finds anisotropic non-overlapping
footprints. In addition to received energy, the DBE algorithm assumes geographical location for
clustering and pair wise communication channels for message exchanges. We simulated a single
IU located at the center of a 2000m ⇥ 2000m area with 100 CRs distributed uniformly around
System:w 2IUswithpatchantennasw pathlossbasedchannelmodelw 1000CRs
w Locationinformationusedonlyforvisualization!
[10] Y. Zhang, W. P. Tay, K. H. Li, and D. Gaiti, “Distributed Boundary Estimation for Spectrum Sensing in Cognitive Radio Networks,” IEEE JSAC, Nov. 2014.
w Boundaryestimatorscan’talwaysdistinguishtransmitterseveniftheirfootprintsarenon-overlapping

D. Markovic / Slide 21
Applications:ExtendExistingAlgorithms
21
28
�1 �0.5 0 0.5 1
�1
�0.5
0
0.5
1
X-Coordinate (km)
Y-C
oordinate
(km
)
(a) Locations of all CRs (crosses) and IUs (triangles)
�1 �0.5 0 0.5 1�1
�0.5
0
0.5
1
�1 �0.5 0 0.5 1�1
�0.5
0
0.5
1
�1 �0.5 0 0.5 1�1
�0.5
0
0.5
1
�1 �0.5 0 0.5 1�1
�0.5
0
0.5
1
(b) Darker crosses mark CRs in footprint of IU, triangle marks
location of IU, and square marks estimated location of IU
Fig. 13. Weighted Centroid Localization of 4 IUs using 200 measurements at 64 CRs. The component means estimated by the
soft reports algorithm are used as input to the WCL algorithm.
it. The footprint detected by the hard reports algorithm had, on average, 8.16% error while the
footprint detected by the DBE algorithm had 24.45% error.
Furthermore, as the example in Fig. 12 shows, the DBE algorithm is not able to distinguish
two IUs even though their footprints do not overlap. For Fig. 12, we simulated two IUs with
patch antennas directed in opposite directions being sensed by 1000 CRs uniformly distributed
in a square area of side 3000m. A channel model with path loss exponent 4 and no fading was
used to ensure a compact footprint as modeled in [10].
F. Example Application: Localization of Multiple IUs
Localization of multiple IUs is a practical application of our proposed algorithms. The source
components’ sample means as estimated by the soft reports algorithm can be used as input for
received energy based localization algorithms. For our example scenario, we use the relative
weighted localization algorithm from [36]. We estimate the location of the mth IU as
lm ,KX
k=1
max(Cµ(m),k � �2
⌫k , 0)
pkPK
k=1 max(Cµ(m),k � �2
⌫k , 0) (41)
where pk 2 R2 is the location of the kth CR. An example of 4 IUs coexisting in space and
spectrum is shown in Fig. 13. Fig. 13(a) shows the locations of all the IUs and CRs and Fig. 13(b)
shows the identified footprints of each IUs and the estimated locations of the corresponding IUs.
SimultaneousWeightedCentroidLocalizationofMultipleIUs
System:w 4IUswithisotropicantennasw urbanshadowfadingchannel
modelw 64CRsw trianglemarkslocationofIUw squaremarksestimatedlocation
ofIU
w Originallyproposedforlocalizingasingletransmitter,ourproposedalgorithmextendsWCLtomultipletransmitters

D. Markovic / Slide 22
ConclusionsandApplications
Conclusions:w Receivedenergycontainsmoreinformationthannoisevs.signalw Channelmodelandlocationarenotnecessaryfortransmitter
identification
Applications:w Higherlayerinferences– IUtrafficestimation– MAClayer– Networktopology
w RoutinginCRAdhocnetworks– QoS supportforrouting– Redundantrouting
22
0.7GHz TVWhitespace2.3GHz SatelliteRadio+LTE3.5GHz Naval Radar +LTE+WiFi5.9GHz DSRC +WiFi
UnderUtilizedLicensedChannels
UnlicensedChannels
2.4GHz Bluetooth+WiFi5.0GHz WiFi +LTE-Unlicensed

D. Markovic / Slide 23
References
23
[1]I.Bisio,M.Cerruti,F.Lavagetto,M.Marchese,M.Pastorino,A.Randazzo,andA.Sciarrone,“Atrainingless WiFi fingerprintpositioningapproachovermobiledevices,”IEEEAntennasWirelessPropag.Lett.,vol.13,pp.832–835,2014.[2]M.IbrahimandM.Youssef,“CellSense:Anaccurateenergy-efficientGSMpositioningsystem,”IEEETrans.Veh.Technol.,vol.61,no.1,pp.286–296,Jan.2012.[3]J.Bazerque andG.Giannakis,“Distributedspectrumsensingforcognitiveradionetworksbyexploitingsparsity,”IEEETrans.SignalProcess.,vol.58,no.3,pp.1847–1862,Mar.2010.[4]H.Yilmaz,T.Tugcu,F.Alagoz,andS.Bayhan,“Radioenvironmentmapasenablerforpracticalcognitiveradionetworks,”IEEECommun.Mag.,vol.51,no.12,pp.162–169,Dec.2013.[5]S.Mishra,R.Tandra,andA.Sahai,“Coexistencewithprimaryusersofdifferentscales,”inIEEEDySPAN,Apr.2007,pp.158–167.[6]S.Chaudhari andD.Cabric,“Cyclicweightedcentroidlocalizationforspectrallyoverlappedsourcesincognitiveradionetworks,”inIEEEGLOBECOM,Dec.2014.[7]J.WangandD.Cabric,“AcooperativeDoA-basedalgorithmforlocalizationofmultipleprimary-usersincognitiveradionetworks,”inIEEEGLOBECOM,Dec.2012.[8]N.Bulusu,J.Heidemann,andD.Estrin,“GPS-lesslow-costoutdoorlocalizationforverysmalldevices,”IEEEPersonalCommun.Mag.,vol.7,no.5,pp.28–34,Oct.2000.[9]L.Bolea,J.Perez-Romero,R.Agusti,andO.Sallent,“Contextdiscoverymechanismsforcognitiveradio,”inIEEEVTC,May2011.[10]Y.Zhang,W.P.Tay,K.H.Li,andD.Gaiti,“Distributedboundaryestimationforspectrumsensingincognitiveradionetworks,”IEEEJSAC,Nov.2014.