Control Systems I - ETH Z · 2018-11-19 · Nyquist contour); Symmetry of poles/zeros about the...
26
Control Systems I Lecture 9: The Nyquist condition Readings: ˚ Astrom and Murray, Chapter 9.1–4 www.cds.caltech.edu/ ~ murray/amwiki/index.php/First_Edition Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Z¨ urich November 16, 2018 J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 1 / 26
Transcript of Control Systems I - ETH Z · 2018-11-19 · Nyquist contour); Symmetry of poles/zeros about the...

Control Systems ILecture 9: The Nyquist condition
Readings: Astrom and Murray, Chapter 9.1–4www.cds.caltech.edu/~murray/amwiki/index.php/First_Edition
Jacopo Tani
Institute for Dynamic Systems and ControlD-MAVT
ETH Zurich
November 16, 2018
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 1 / 26

Tentative schedule
# Date Topic
1 Sept. 21 Introduction, Signals and Systems2 Sept. 28 Modeling, Linearization
3 Oct. 5 Analysis 1: Time response, Stability4 Oct. 12 Analysis 2: Diagonalization, Modal coordinates5 Oct. 19 Transfer functions 1: Definition and properties6 Oct. 26 Transfer functions 2: Poles and Zeros7 Nov. 2 Analysis of feedback systems: internal stability,
root locus8 Nov. 9 Frequency response9 Nov. 16 Analysis of feedback systems 2: the Nyquist
condition10 Nov. 23 Specifications for feedback systems11 Nov. 30 Loop Shaping12 Dec. 7 PID control13 Dec. 14 State feedback and Luenberger observers14 Dec. 21 On Robustness and Implementation challenges
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 2 / 26

Recap
A system is a function mapping input signals into output signals.
An LTI system can be described by a transfer function.
L(s)u y
L(s) = N(s)D(s)
D(s) is the characteristic polynomial of the matrix A.
Poles: the roots of D(s), zeros: the roots of N(s)
u(t) = sin(ωt) → yss(t) = |L(jω)| sin(ωt + ∠L(jω)).
For any input U(s) → Y (s) = L(s)U(s)
Stable system: a system that does not “blow up”.
The system L(s) is BIBO-stable if all of its poles are on the LHP.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 3 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Recap
Feedback control allows one to
Stabilize an unstable system;Handle uncertainties in thesystem;Reject external disturbances.
k L(s)r e u y
−
The closed-loop transfer function is:kL(s)
1 + kL(s).
It is also called the “complimentary sensitivity function”.
The closed-loop poles: the zeros of 1 + kL(s).
The poles of 1 + kL(s) are identical to the poles of L(s).
The closed-loop system is stable if all of its poles are on the LHP.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 4 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

The phase rule and the magnitude rule
G (s) = k(s − z1)(s − z2) . . . (s − zm)
(s − p1)(s − p2) . . . (s − pn)
Re
Imjωjωjωjω
|G (s)| = |k | |s − z1||s − z2| . . . |s − zm||s − p1||s − p2| . . . |s − pn|
∠G (s) = ∠k + ∠(s − z1) + ∠(s − z2) + . . .+ ∠(s − zm)
−∠(s − p1)− ∠(s − p2)− . . .− ∠(s − pn)
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 5 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Classical methods for feedback control
The main objective here is to assess/design the properties of the closed-loopsystem by exploiting the knowledge of the open-loop system, and avoidingcomplex calculations.
Stability analysis of closed-loop system:
Routh-Hurwitz criterion: a mathematical evaluation of the characteristicequation of the closed-loop system.
There are three geometric methods to find out the stability of a systems:
They are useful both in analysis and synthesis.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 6 / 26

Classical methods for feedback control
Root Locus
Quick assessment of control design feasibility. The insights are correct andclear.
Can only be used for finite-dimensional systems (e.g. systems with a finitenumber of poles/zeros)
Difficult to do sophisticated design.
Hard to represent uncertainty.
Nyquist plot
The most authoritative closed-loop stability test. It can always be used (finiteor infinite-dimensional systems)
Easy to represent uncertainty.
Difficult to draw and to use for sophisticated design.
Bode plots
Potentially misleading results unless the system is open-loop stable andminimum-phase.
Easy to represent uncertainty.
Easy to draw, this is the tool of choice for sophisticated design.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 7 / 26

Towards Nyquist’s theorem
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 8 / 26

The goal
k L(s)r e u y
−
Our goal is to count the number of RHP poles (if any) of the closed-looptransfer function
T (s) =kL(s)
1 + kL(s)
based on the frequency response of the open-loop transfer function L(s).
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 9 / 26

The principle of variation of the argument
If we take a complex number in the s-plane and substitute it into a functionG (s), it results in another complex number which could be plotted in theG (s)-plane.Let Γ be a simple closed curve in the s-plane, which does not pass throughany pole of a function G (s).As s moves along the closed curve Γ, G (s) describes another closed curve.
D
G(s)
Re
Im Im
Re
Remarkable fact: The number of times G (s) encircles the origin, or,equivalently, the total variation in its argument ∠G (s), as s moves along Γ,counts the number of zeros and poles of G (s) in D.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 10 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Phase change and encirclements
Consider a clockwise closed contour, Γ, not passing through the origin 0,traversed by s.
The origin is either inside or outside Γ.
What is the net change in ∠s as s traverses Γ?
The phase change as a s traverses a closed path Γ is equal to −2πN , whereN is the number of clockwise encirclements of 0 by Γ.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 11 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Phase change and encirclements
Consider a simple closed contour, Γ , traversed clockwise by s.
A fixed complex number r is either inside or outside Γ.
What is the net phase change in ∠(s − r) as s traverses Γ?
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 12 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Principle of argument
Find the image of Γ under G (s) = k(s − z1)(s − z2) . . . (s − zm)
(s − p1)(s − p2) . . . (s − pn)At any value of s, the angle of G (s) is:
∠G (s) = ∠k + ∠(s − z1) + . . .+ ∠(s − zm)− ∠(s − p1)− . . .− ∠(s − pn)
−2π(number of clockwise encirclements of 0 by G (Γ)) =
= net change in ∠G (s) as s traverses Γ =
= net change in ∠(s − z1) + . . .+ net change in ∠(s − zm)−−net change in ∠(s − p1)− . . .− net change in ∠(s − pn)
⇒ −2πN = −2πZ − (−2πP)
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 13 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

The general case
Theorem (Variation of the argument [Proof in A&M, pp. 277–278])
The number N of times that G (s) encircles the origin of the complex plane as smoves along the simple closed curve Γ satisfies
N = Z − P,
where Z and P are the numbers of zeros and poles of G (s) in D, respectively.Note that the encirclements are counted positive if in the same direction as smoves along Γ, and negative otherwise.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 14 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

How do we use these results for feedback control?
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 15 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

The Nyquist or D contour
For closed-loop stability, the closed-loop poles, which corresponds to theroots (i.e., zeros!) of 1 + kL(s), must have negative real part.
The poles of 1 + kL(s) are also the poles of L(s).
Construct the region D as a D-shaped region containing an arbitrarily large(but finite) part of the complex right-half plane.
As s moves along the boundary of this region, 1 + kL(s) encircles the originN = Z − P times, where
Z is the number of unstable closed-loop poles (zeros of 1 + kL(s) in the rhp);
P is the number of unstable open-loop poles (poles of 1 + kL(s) in the rhp);
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 16 / 26

The Nyquist plot
The previous statement can be rephrased:
As s moves along the boundary of this region, L(s) encircles the −1/k pointN = Z − P times, where
Z is the number of unstable closed-loop poles (zeros of 1 + kL(s) in theNyquist contour);
P is the number of unstable open-loop poles (poles of 1 + kL(s) in theNyquist contour);
Symmetry of poles/zeros about the real axis implies that
∠L(−jω) = −∠L(jω),
hence the plot of L(s) when s moves on the boundary of the Nyquist contouris just the polar plot + its symmetric plot about the real axis. This is what iscalled the Nyquist plot.
The key feature of the Nyquist plot is the number of encirclements of the−1/k point.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 17 / 26

The Nyquist contour
Segment 1 corresponds to s = jω, where ω : 0→∞.
On this segment, L(Γ) is just L(jω): frequency response.
Segment 2 corresponds to s = Re jθ, where R → ∞ and
θ :π
2→ −π
2.
On this segment, L(Γ) collapses on a single point, sinceR is very large.
Segment 3 corresponds to s = jω, where ω : −∞→ 0.
On this segment, L(Γ) is just L(−jω), where ω : 0→∞.L(−jω) is complex-conjugate of L(jω), so L(−jω) is thereflection of L(jω) about the real axis.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 18 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

The Nyquist condition
Theorem
Consider a closed-loop system with loop transfer function kL(s), which has Ppoles in the region enclosed by the Nyquist contour. Let N be the net number ofclockwise encirclements of −1/k by L(s) when s moves along the Nyquist contourin the clockwise direction. The closed loop system has Z = N + P poles in theNyquist contour.
In particular:
If the open-loop system is stable, the closed-loop system is stable as long asthe Nyquist plot of L(s) does NOT encircle the −1/k point.
If the open-loop system has P poles, the closed-loop system is stable as longas the Nyquist plot of L(s) encircles the −1/k point P times in the negative(counter-clockwise) direction.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 19 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Counting encirclements
Draw a line out from the −1/k point in any arbitrary direction.
Count the number of times that the Nyquist path crosses the line in theclockwise direction, and subtract the number of times it crosses in thecounterclockwise direction.
You get the number of clockwise encirclements of the −1/k point.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 20 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Nyquist plot when L(s) has no pole on the jω axis
1 Image of Segment 1: Plot L(jω) for ω : 0→∞. This is also called the polarplot of L(s). There is no special rules for drawing it.
2 Image of Segment 3: Reflect it about the real axis to draw L(jω) forω : −∞→ 0.
3 Image of Segment 2: This segment maps onto a point, in the case ofphysically realizable systems.
For a strictly proper systems: if s →∞, then L(s) maps onto origin.
For a proper systems: if s →∞, then L(s) would be a constant.
4 The points where the Nyquist plot crosses the real axis and the unit circle areof importance.
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 21 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Nyquist condition — single real, stable pole
L(s) =2
s + 1
Re
Im
Re
Im
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 22 / 26
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi
Shima Mousavi

Nyquist condition — open-loop unstable system
L(s) =s + 2
s2 − 1
Re
Im
Re
Im
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 23 / 26

Dealing with open-loop poles on the imaginary axis
If there are open-loop poles on theimaginary axis, make small“indentations” in the Nyquistcontour, e.g., leaving the imaginarypoles on the left.
Be careful on how you close theNyquist plot “at infinity:” If movingCCW around the poles, then closethe plot CW.
Re
Im
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 24 / 26

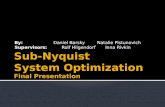
Nyquist — poles on the imaginary axis
L(s) =2
(s2 + 1)(s + 1)
Re
Im
Re
Im
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 25 / 26

Summary
In this lecture, we learned:
How to sketch a Nyquist plot.
The Nyquist condition to determine closed-loop stability using a Nyquist plot.
How to check the Nyquist condition..
J. Tani, E. Frazzoli (ETH) Lecture 9: Control Systems I 16/11/2018 26 / 26