
Wireless and hardwired intrusion control panel IC60 - Sintony 60

Control Design
Chapter 5. JPH.

Processor with DP and CU
Register FileRF
CONTROLUNIT
F1 F2
Multiplexers MUX2
Multiplexers MUX1
DatapathUnit
ControlSignals Instructions
Data

A := A + B
CU
F1 F2
DatapathUnit
ControlSignals Instructions
p q r s MUX1
A
B
t
A+B
RF
u v MUX2
w x y z
A B
A+B
Select p-t
Write ARead ARead B
Select u-w
Select v-x
AddOverflow

Finite State Machine
Wikipedia

GCD Procedure

GCD Procedure
Conditions Actions
XR > 0:
XR := 20; YR := 12;
XR > 0:
XR > 0:
XR > 0:
XR ≤ 0:
XR > YR:
XR ≤ YR:
XR ≤ YR:
XR ≤ YR:
XR := XR – YR = 8;
YR := 8; XR := 12;
YR := 4; XR := 8;
YR := 4; XR := 4;
Z := 4;
XR := XR – YR = 4;
XR := XR – YR = 4;
XR := XR – YR = 0;
20 12
8 12
12 8
4 8
8 4
4 4
0 4

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
Select XY

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
Select XY

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
Select XY
Load XR
Load YR

GCD Control Unit
State
S0 (Begin)
Subtract Swap Select XY
0 0 1
Load XR
1
Load YR
1
InputsOutputs

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
Next States?

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
CU Inputs
XR > 0
XR >= YR

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
CU Inputs
XR > 0
XR >= YR
CU New State
Subtract

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
CU Inputs
XR > 0
XR >= YR
CU New State
Swap

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Begin
CU Inputs
XR > 0
XR >= YR
CU New State
Exit

GCD Control Unit
State
S0 (Begin)
0-
S3
10
S1
11
S2
Subtract Swap Select XY
0 0 1
Load XR
1
Load YR
1
Inputs
(XR > 0) (XR >= YR)Outputs
S1
S2
Swap
Subtract
S0
S1
S2
10
11
0XS3

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Swap
CU Outputs

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Swap
Swap
Load XR
Load YR
CU Outputs

GCD Control Unit
State
S0 (Begin)
0-
S3
10
S1
11
S2
Subtract Swap Select XY
0 0 1
Load XR
1
Load YR
1
Inputs
(XR > 0) (XR >= YR)Outputs
S1
S2
Swap
Subtract
S0
S1
S2
10
11
S1 (Swap) 0 1 0 1 1
S3
0X

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Swap
Subtract
CU Next States
Subtract
CU Inputs
XR > 0
XR >= YR
CU Inputs
XR > 0
XR >= YR

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Swap
Subtract
CU Next States
Subtract
CU Inputs
XR > 0
XR >= YR
CU Inputs
XR > 0
XR >= YR

GCD Control Unit
State
S0 (Begin)
S1 (Swap)
0-
S3
S2
10
S1
S2
11
S2
S2
Subtract Swap Select XY
0
0
0
1
1
0
Load XR
1
1
Load YR
1
1
Inputs
(XR > 0) (XR >= YR)Outputs
S0
S1
S2
10
11S3
0X
XX

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Subtract
CU Outputs

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Subtract
CU Outputs
Subtract
Load XR

GCD Control Unit
State
S0 (Begin)
S1 (Swap)
0-
S3
S2
10
S1
S2
11
S2
S2
Subtract Swap Select XY
0
0
0
1
1
0
Load XR
1
1
Load YR
1
1
Inputs
(XR > 0) (XR >= YR)Outputs
S0
S1
S2
10
11S3
0X
XX
S2 (Subtract) 1 0 0 1 0

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Subtract
CU Next State?
Swap
Subtract
CU Inputs
XR > 0
XR >= YR
CU Inputs
XR > 0
XR >= YR

GCD Hardware
Subtractor Comparators
Multiplexers MUX
Datapath Unit
Reset
Register XR Register YR
Z X Y
Subtract
Swap
Select XY
Load XR
Load YR
(XR ≥ YR)
(XR > 0)
ControlUnit
Subtract
CU Next State?
Swap
Exit
CU Inputs
XR > 0
XR >= YR
CU Inputs
XR > 0
XR >= YR

GCD Control Unit
State
S0 (Begin)
S1 (Swap)
S2 (Subtract)
0-
S3
S2
S3
10
S1
S2
S1
11
S2
S2
S2
Subtract Swap Select XY
0
0
1
0
1
0
1
0
0
Load XR
1
1
1
Load YR
1
1
0
Inputs
(XR > 0) (XR >= YR)Outputs
S0
S1
S2
10
11S3
0X
XX
0X
10
Exit State?

GCD Control Unit – Truth Table
State
S0 (Begin)
S1 (Swap)
S2 (Subtract)
S3 (End)
0-
S3
S2
S3
S3
10
S1
S2
S1
S3
11
S2
S2
S2
S3
Subtract Swap Select XY
0
0
1
0
0
1
0
0
1
0
0
0
Load XR
1
1
1
0
Load YR
1
1
0
0
Inputs
(XR > 0) (XR >= YR)Outputs
S0
S1
S2
10
11S3
0X
XX
0X
10
FSM

Control Unit Design● Hardwired Control
– Specific to the function of the processor (eg. GCD)
– CU design starts from the FSM
– Fast
– Classical Method
– One hot method
● Microprogrammed Control– Uses control memory – can be reprogrammed to suit
the function
– Software controlled

Hardwired Control Design
SequentialLogicCircuit
InstructionRegister
StatusSignals
ControlSignals

GCD Control Unit – Truth Table
State
S0 (Begin)
S1 (Swap)
S2 (Subtract)
S3 (End)
0-
S3
S2
S3
S3
10
S1
S2
S1
S3
11
S2
S2
S2
S3
Subtract Swap Select XY
0
0
1
0
0
1
0
0
1
0
0
0
Load XR
1
1
1
0
Load YR
1
1
0
0
Inputs
(XR > 0) (XR >= YR)Outputs
S0
S1
S2
10
11S3
0X
XX
0X
10
FSM

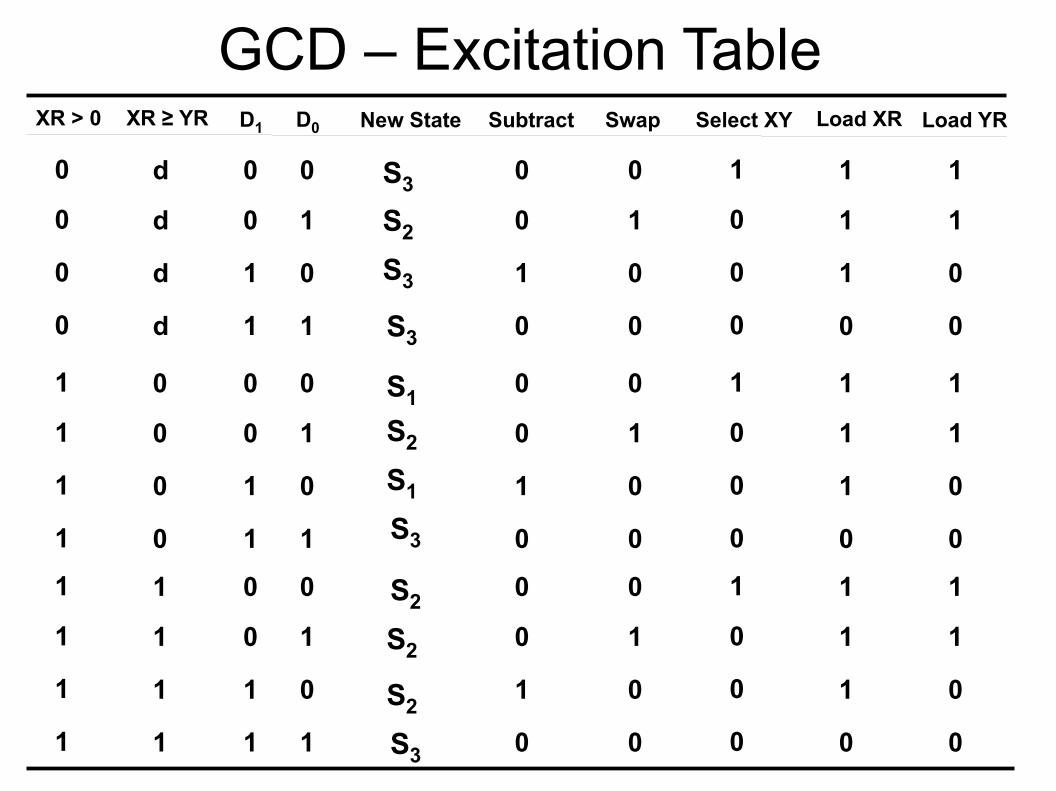
GCD – Excitation TableXR > 0 Subtract Swap Select XY Load XR Load YRXR ≥ YR
0
0
0
0
1
1
1
1
1
1
1
1
d
d
d
d
0
0
0
0
1
1
1
1
0
0
1
0
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
1
1
0
1
1
1
0
1
1
1
0
1
1
0
0
1
1
0
0
1
1
0
0
S3
S0
S1
S2
S3
S0
S1
S2
S3
S0
S1
S2
S3
S3
S3
S2
S1
S2
S1
S3
S2
S2
S2
S3
Old State New State

CU Design – Classical Method
S0 = 0 0
S1 = 0 1
S2 = 1 0
S3 = 1 1
Assign a number for each State
● How many Flip flops are needed to realize an n state FSM?
● D0 and D1 are FF present state outputs.
● D0+ and D1
+ are FF next state outputs.
D0D1
GCD – Excitation TableXR > 0 Subtract Swap Select XY Load XR Load YRXR ≥ YR
0
0
0
0
1
1
1
1
1
1
1
1
d
d
d
d
0
0
0
0
1
1
1
1
0
0
1
0
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
1
1
0
1
1
1
0
1
1
1
0
1
1
0
0
1
1
0
0
1
1
0
0
S3
S3
S3
S2
S1
S2
S1
S3
S2
S2
S2
S3
New StateD1 D0
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1

GCD – Excitation TableXR > 0 D1 D0 D1 Subtract Swap Select XY
+Load XR Load YRXR ≥ YR
0
0
0
0
1
1
1
1
1
1
1
1
d
d
d
d
0
0
0
0
1
1
1
1
D0+
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
1
1
0
1
0
1
1
1
1
1
1
0
1
1
1
0
1
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
1
1
0
1
1
1
0
1
1
1
0
1
1
0
0
1
1
0
0
1
1
0
0

GCD – Classical Method
Subtract=D1⋅D̄ 0
Swap= D̄1⋅D 0
Select XY=D̄1⋅D̄ 0
Load XR=D̄0+ D̄1
Load YR=D̄ 1
What are the equations for each of the outputs in the excitation table?What are the equations for each of the outputs in the excitation table?
Subtract=D1⋅D̄ 0
Swap= D̄1⋅D 0
Select XY= D̄1⋅D̄ 0
Load XR=D0⋅D1

Subtract=D1⋅D̄0
Swap= D̄1⋅D 0
GCD – All NAND Classical Design
Select XY= D̄1⋅D̄ 0Load XR=D0⋅D1 Load YR=D̄ 1

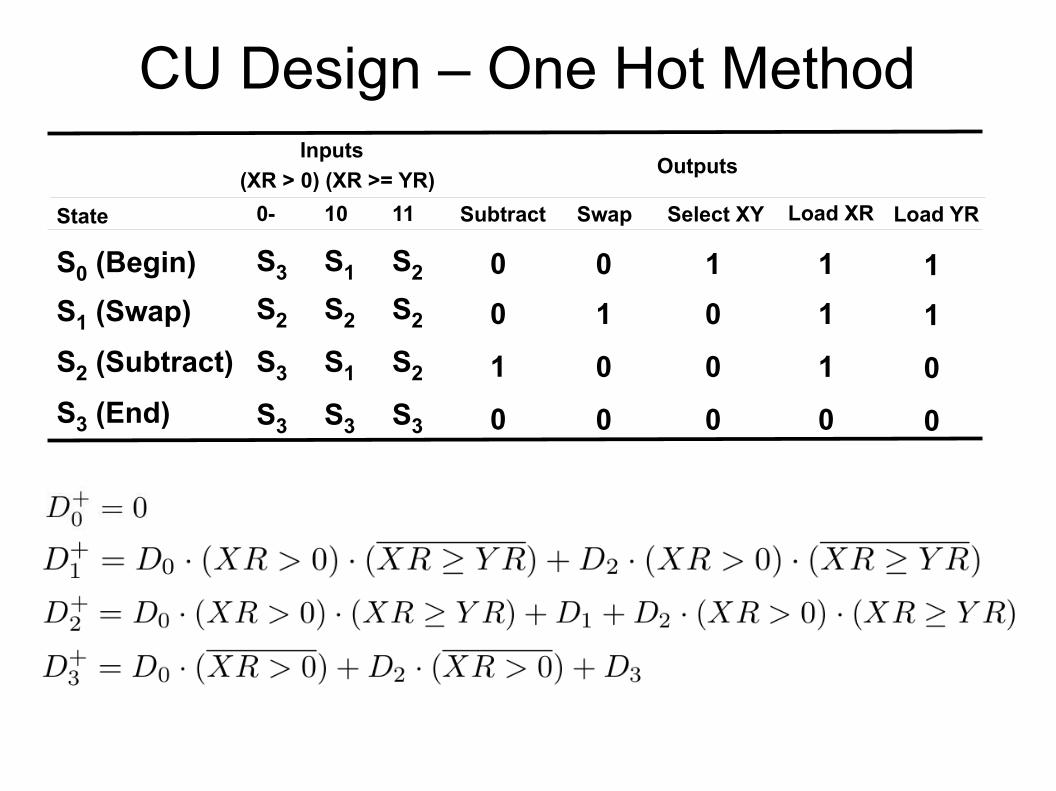
CU Design – One Hot Method
S0 = 0 0 0 1
S1 = 0 0 1 0
S2 = 0 1 0 0
S3 = 1 0 0 0
Assign a one hot combinationfor each State
● n Flip flops are needed to realize an n state FSM
D0D1D2D3

CU Design – One Hot Method
State
S0 (Begin)
S1 (Swap)
S2 (Subtract)
S3 (End)
0-
S3
S2
S3
S3
10
S1
S2
S1
S3
11
S2
S2
S2
S3
Subtract Swap Select XY
0
0
1
0
0
1
0
0
1
0
0
0
Load XR
1
1
1
0
Load YR
1
1
0
0
Inputs
(XR > 0) (XR >= YR)Outputs
D1+
D0+
D2+
D3+
CU Design – One Hot Method
State
S0 (Begin)
S1 (Swap)
S2 (Subtract)
S3 (End)
0-
S3
S2
S3
S3
10
S1
S2
S1
S3
11
S2
S2
S2
S3
Subtract Swap Select XY
0
0
1
0
0
1
0
0
1
0
0
0
Load XR
1
1
1
0
Load YR
1
1
0
0
Inputs
(XR > 0) (XR >= YR)Outputs

CU Design – One Hot Method
State
S0 (Begin)
S1 (Swap)
S2 (Subtract)
S3 (End)
0-
S3
S2
S3
S3
10
S1
S2
S1
S3
11
S2
S2
S2
S3
Subtract Swap Select XY
0
0
1
0
0
1
0
0
1
0
0
0
Load XR
1
1
1
0
Load YR
1
1
0
0
Inputs
(XR > 0) (XR >= YR)Outputs
Subtract=D2
Swap=D1
Select XY=D 0
Load XR=D0+D1+D 2
Load YR=D 0+D1

All NAND One-Hot Design

Two's Complement Multiplier
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
ExternalControlSignals
Comparator
7
COUNT7 ControlUnit

Multiplier FlowchartBegin
A := 0COUNT := 0
F := 0M := INBUS
Q := INBUS
Q(0) = 0?
A := A + MF := M(7) and Q(0) or F
A(7) := FA(6:0).Q := A.Q(7:1)
COUNT := COUNT + 1
COUNT7 = 1?
Q(0) = 0?
A := A – MQ(0) := 0
OUTBUS := Q
OUTBUS := A
End
S0
S1
S2
S3
S4
S5
S6
S7
S0
Yes
Yes
No
Yes
No
No
Cycle 0 Cycle 1 to 7 Cycle 8 Cycle 9

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
S1
A := 0COUNT := 0
F := 0M := INBUS

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
S2
Q := INBUS

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
S3
A := A + MF := M(7) and Q(0) or F
c3 c4c2

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
S4
c3 c4c2
A(7) := FA(6:0).Q := A.Q(7:1)
COUNT := COUNT + 1c0
c1
c11

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
c3 c4c2
c0
c1
c11
S5
A := A – MQ(0) := 0

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
S5
c3 c4c2
c0
c1
c11
A := A – MQ(0) := 0
c5
c5

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
S6
c3 c4c2
c0
c1
c11
c5
c5
OUTBUS := Q
c7

Multiplier Control Points
Count
BEGIN
END
CLOCK
...c0
c1
c10
A Q M
Parallel Adder
SignLogic
Q[0]M[7]
cin
F
OUTBUS
INBUS
InternalControlSignals
c9
c10
c10
ExternalControlSignals
Comparator
c10
7
COUNT7 ControlUnit
c8
S7
c3 c4c2
c0
c1
c11
c5
c5
c7
OUTBUS := A
c6

Multiplier Control Signalsc0
c1
c2
c3
c4
c5
c6
c7
c8
c9
c10
c11
END
Set sign bit of A to F
Right-shift register-pair A.Q
Transfer adder output to A
Transfer A to left input of adder
Transfer M to right input of adder
Perform subtraction. Clear Q[0].
Transfer A to output bus.
Transfer Q to output bus.
Transfer word on input bus to Q
Transfer word on input bus to M
Clear A, COUNT, and F registers
Increment COUNT
Completion signal (CU idle)

Multiplier FlowchartBegin
A := 0COUNT := 0
F := 0M := INBUS
Q := INBUS
Q(0) = 0?
A := A + MF := M(7) and Q(0) or F
A(7) := FA(6:0).Q := A.Q(7:1)
COUNT := COUNT + 1
COUNT7 = 1?
Q(0) = 0?
A := A – MQ(0) := 0
OUTBUS := Q
OUTBUS := A
End
S0
S1
S2
S3
S4
S5
S6
S7
S0
Yes
Yes
No
Yes
No
No
c9, c10
c8
c2, c3, c4
c0, c1, c11
c2, c3,c4, c5
c7
c6
Cycle 0 Cycle 1 to 7 Cycle 8 Cycle 9

Multiplier Control Unit – State Table
S0
S1
S2
S3
S4
S5
S6
S7
S0 S0 S0 S0 S1 S1 S1 S1 0 0 0 0 0 0
State 000 001 010 011 100 101 110 111 c0 c1c2 c3 c4 c5
S2 S2 S2 S2 S2 S2 S2 S2 0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 1 1 0
1 1 0 0 0 0
0 0 1 1 1 1
0 0 0 0 0 0
0 0 0 0 0 0
Inputs: BEGIN Q[0] Count7Inputs: BEGIN Q[0] Count7
S4 S4 S3 S3 S4 S4 S3 S3
S4 S4 S4 S4 S4 S4 S4 S4
S4 S6 S3 S5 S4 S6 S3 S5
S6 S6 S6 S6 S6 S6 S6 S6
S7 S7 S7 S7 S7 S7 S7S7
S0 S0 S0 S0 S0 S0 S0S0
D0=D 0⋅BEGIN +D7+
D1=D0⋅BEGIN
D 2=D 1
+
+
D3=D2⋅Q [0]+D4⋅Q [0 ]⋅COUNT7+
D 4=D2⋅D0+D3+D 4⋅Q [0]⋅COUNT7+
D5=D4⋅Q [0]⋅COUNT7+
0
c6
0
0
0
0
0
1
0
0 0 0 0 1
c7 c8 c9 c10 END
0 1 1 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 1 0
0 0 0 0 0
0 0 0 0 0
1 0 0 0 0
c11
0
0
1
0
0
0
0
0

Multiplier Control Unit – State Table
S0
S1
S2
S3
S4
S5
S6
S7
S0 S0 S0 S0 S1 S1 S1 S1 0 0 0 0 0 0 0
State 000 001 010 011 100 101 110 111 c0 c1c2 c3 c4 c5 c6
S2 S2 S2 S2 S2 S2 S2 S2 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 1 1 1 0 0
1 1 0 0 0 0 0
0 0 1 1 1 1 0
0 0 0 0 0 0 1
0 0 0 0 0 0 0
Inputs: BEGIN Q[0] Count7Inputs: BEGIN Q[0] Count7
S4 S4 S3 S3 S4 S4 S3 S3
S4 S4 S4 S4 S4 S4 S4 S4
S4 S6 S3 S5 S4 S6 S3 S5
S6 S6 S6 S6 S6 S6 S6 S6
S7 S7 S7 S7 S7 S7 S7S7
S0 S0 S0 S0 S0 S0 S0S0
D6=D 5+D4⋅Q [0]⋅COUNT7+
D7=D6+
0 0 0 0 1
c7 c8 c9 c10 END
0 1 1 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 1 0
0 0 0 0 0
0 0 0 0 0
1 0 0 0 0
c11
0
0
1
0
0
0
0
0

Multiplier Control Unit – State Table
S0
S1
S2
S3
S4
S5
S6
S7
S0 S0 S0 S0 S1 S1 S1 S1 0 0 0 0 0 0 0 0 0 0 0 1
State 000 001 010 011 100 101 110 111 c0 c1c2 c3 c4 c5 c6 c7 c8 c9 c10 END
S2 S2 S2 S2 S2 S2 S2 S2 0 0 0 0 0 0 0 0 1 1 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 1 1 0 0 0 0 0 0 0
1 1 0 0 0 0 0 0 0 0 1 0
0 0 1 1 1 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
Inputs: BEGIN Q[0] Count7Inputs: BEGIN Q[0] Count7
S4 S4 S3 S3 S4 S4 S3 S3
S4 S4 S4 S4 S4 S4 S4 S4
S4 S6 S3 S5 S4 S6 S3 S5
S6 S6 S6 S6 S6 S6 S6 S6
S7 S7 S7 S7 S7 S7 S7S7
S0 S0 S0 S0 S0 S0 S0S0
c0=c1=c11=D 4
c2=c3=c4=D3+D5
c5=D5
c6=D6
c7=D7
c8=D2
c9=c10=D1
END=D0
c11
0
0
1
0
0
0
0
0

MultiplierCU –One HotDesign

Microprogrammed Control
● Hardwired control unit design – inflexible, difficult to verify.
● Microprogramming– Control Memory
– Microinstructions, Microprogram
– Microassembler


Microprogrammed Control Design
ControlMemory
μInstructionRegister
Decoder
AddressLogic
InstructionRegister

Microprogrammed Controller
CONTROLMEMORY
(CM)
μPCMUX
External address
External conditions
ConditionSelect
Increment
Microprogram Counter
Microinstruction Register μIR
Decoders
Control signals to DPU
Controlfields
BranchAddress
Condition Select
Microinstruction Format

Two's Complement MultiplicationA := 0, COUNT := 0, F := 0, M := INBUS;
Q := INBUS;
If Q[0] = 0 then go to RSHIFT:
A[7:0] := A[7:0] + M[7:0], F := (M[7] and Q[0]) or F;
A[7] = F, A[6:0].Q = A.Q[7:1], COUNT = COUNT + 1,if COUNT7 = 0 then go to TEST1;
if Q[0] = 0 then go to OUTPUT1;
A[7:0] := A[7:0] – M[7:0], Q[0] := 0;
OUTBUS := A;
OUTBUS := Q;
Halt;END:
OUTPUT2:
OUTPUT1:
SUBTRACT:
TEST2:
RSHIFT:
ADD:
TEST1:
INPUT:
BEGIN: c9, c10
c8
c2, c3, c4
c0, c1, c11
c2, c3, c4, c5
c6
c7
END

Binary Microprogram for 2's Complement Multiplication
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
00
00
01
00
10
01
00
00
00
11
0000
0000
0100
0000
0010
0111
0000
0000
0000
1001
Address in CM
Control fieldsCondition select
BranchAddress
0 0 0 0 0 0 0
c1 c2 c3 c4 c5 c6
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 1 1 1 0 0
1 1 0 0 0 0 0
0 0 1 1 1 1 0
0 0 0 0 0 0 1
0 0 0 0 0 0 0
0 0 0 0 1
c7 c8 c9 c10 END
0 1 1 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 1 0
0 0 0 0 0
0 0 0 0 0
1 0 0 0 0
c11
0
0
1
0
0
0
0
0
c0
0 0 0 0 0 0 0 0 0 0 0 00
0 0 0 0 0 0 0 0 0 0 0 00

Two's Complement MultiplierMicroprogrammed Control Unit
CONTROLMEMORY
(10 x 19 bits)
μPC
BEGIN
ConditionSelect
Increment
μIR
0
Q[0]
COUNT7
1
TimingLogic
Branch Address
Reset
{ci}, END
134
2
19
00
01
10
11


















