
When you see… Find the zeros You think…. To find the zeros...

Control 4
PID Control Techniques
Tuning PID Controllers
Finding the values for KP, KI and KD to make
the system behave as desired can be
difficult
Tuning PID Controllers
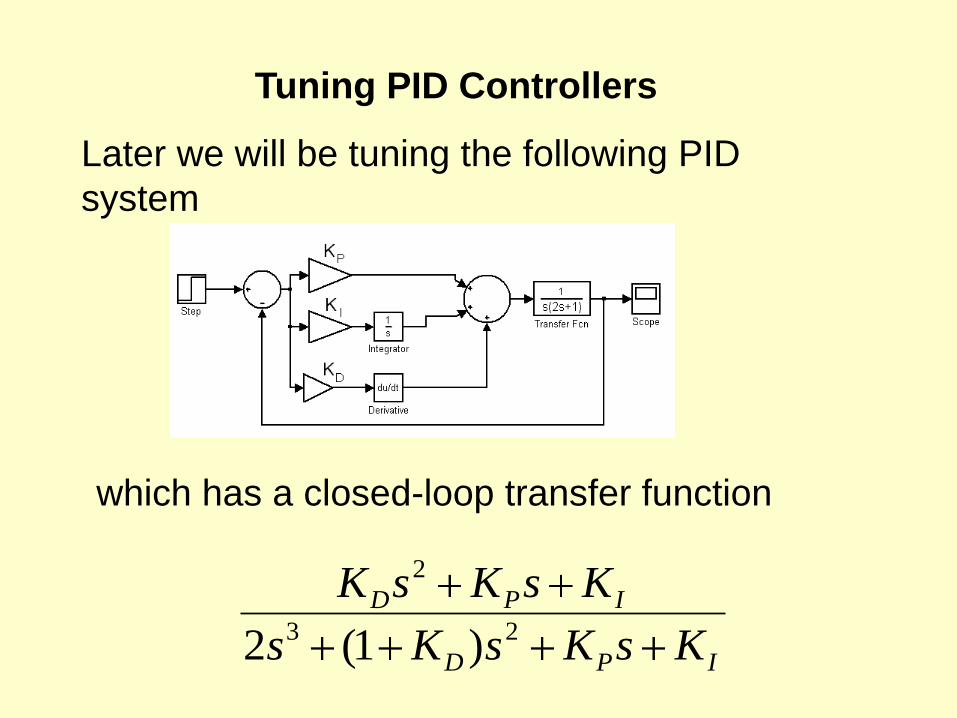
Later we will be tuning the following PID
system
IPD
IPD
KsKsKs
KsKsK23
2
)1(2
which has a closed-loop transfer function

Tuning PID Controllers
Changes in the values of the controller
gains move not only the system poles but
also the system zeros.
IPD
IPD
KsKsKs
KsKsK23
2
)1(2
The consequence of this is that adjustment
of a controller gain makes multiple changes
to the system performance some of which
can be undesirable.

Ziegler-Nichols open-loop PID tuning
A step input is applied to the open-loop
system and the response is plotted.

The settings for KP, KI and KD are shown
below
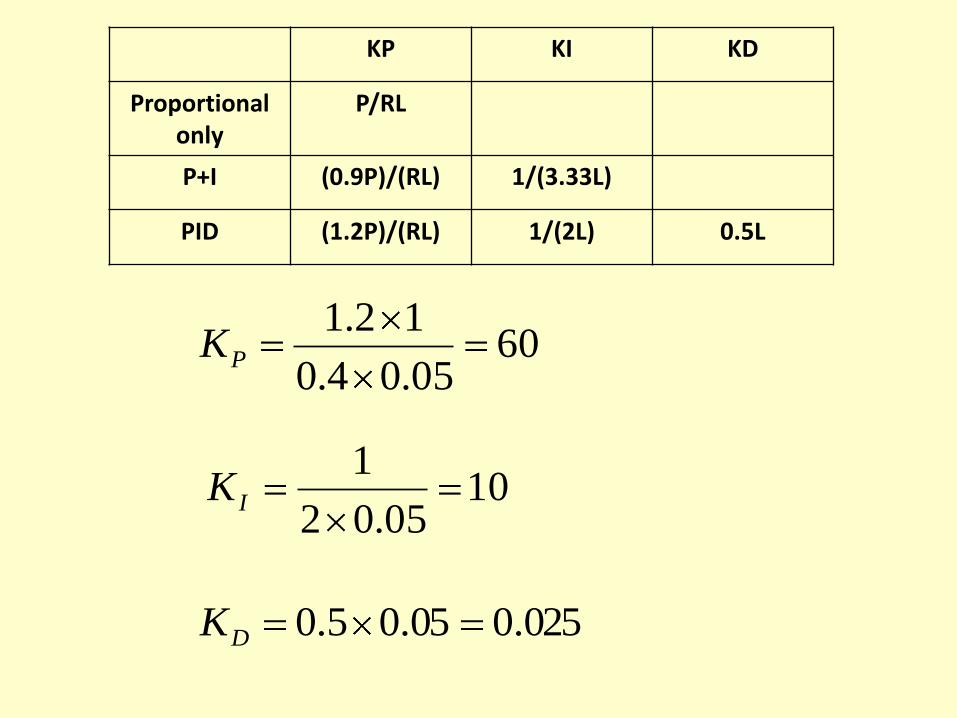
KP KI KD
Proportional only
P/RL
P+I (0.9P)/(RL) 1/(3.33L)
PID (1.2P)/(RL) 1/(2L) 0.5L
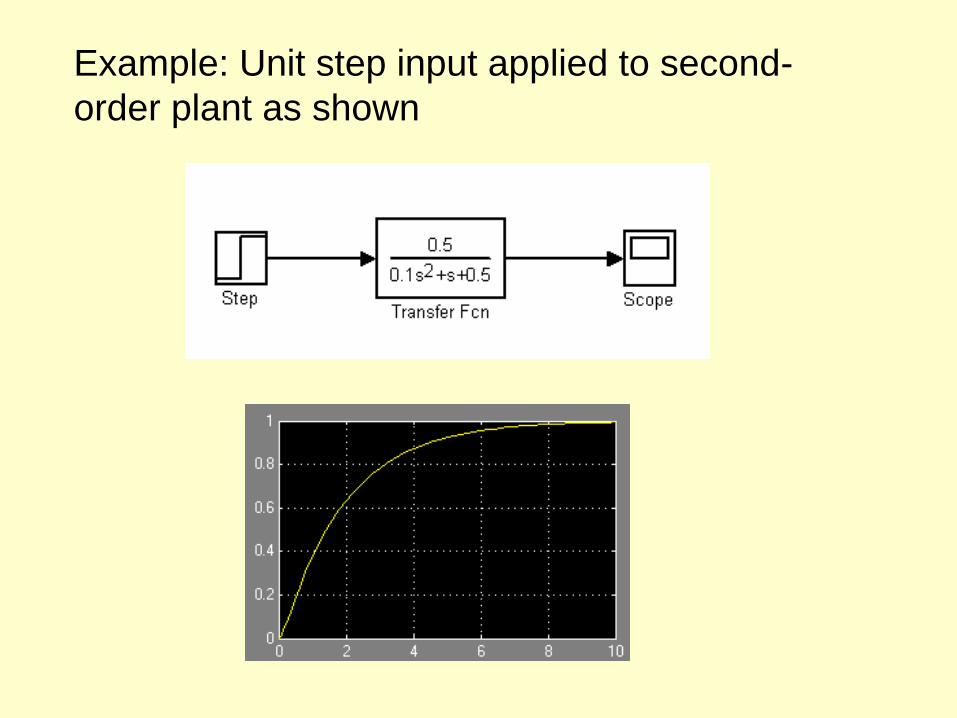
Example: Unit step input applied to second-
order plant as shown

To evaluate the lag, L we’ll run the
sequence over 1 sec

Returning to the 10 sec plot
4.02
8.0RSlope
Slope of response 4.0R
sec05.0L
1P
Lag
Height of step input
So the three parameters are
Now we will use the Ziegler-Nichols table to
calculate the controller gains
KP KI KD
Proportional only
P/RL
P+I (0.9P)/(RL) 1/(3.33L)
PID (1.2P)/(RL) 1/(2L) 0.5L
6005.04.0
12.1PK
1005.02
1IK
025.005.05.0DK

Putting the plot into a PID control loop
and setting the gains

We get a peak time of 0.2 sec, a 40 %
overshoot, a settling time of 0.8 sec and
zero steady-state error

Increasing the derivative gain KD from 0.025
to 1, halves the overshoot
The Ziegler-Nichols rules can provide a
starting point for further tuning.
The rules do not allow for exact specification of
performance parameters but it is not necessary to
have a system model.

Controller design by pole-placement
Pole placement controller design consists
of calculating the gains to produce a
characteristic equation equivalent to the
desired pole location.
We will start with an example based on a
second-order response
Example 1
An electric motor with transfer function
is to respond to a step input with 5%
overshoot and a peak time tp=2 sec.
2
1)(
ssG
Calculate the required gains for a PI
controller

The required value for ζ
corresponding to a 5%
overshoot is 0.69
The given value of peak time
tp=2 sec
allows us to calculate ωn.
21n
pt

21n
pt
21p
n
t
269.012n
sec/17.2 radn

Inserting these values for ζ and ωn into the
standard second order characteristic equation
02 22
nnss
gives
07.499.22 ss
This is the desired closed-loop characteristic
equation.

The block diagram for the PI controller is shown
below.

The PI section
reduces tos
KK I
P
s
KsK IP
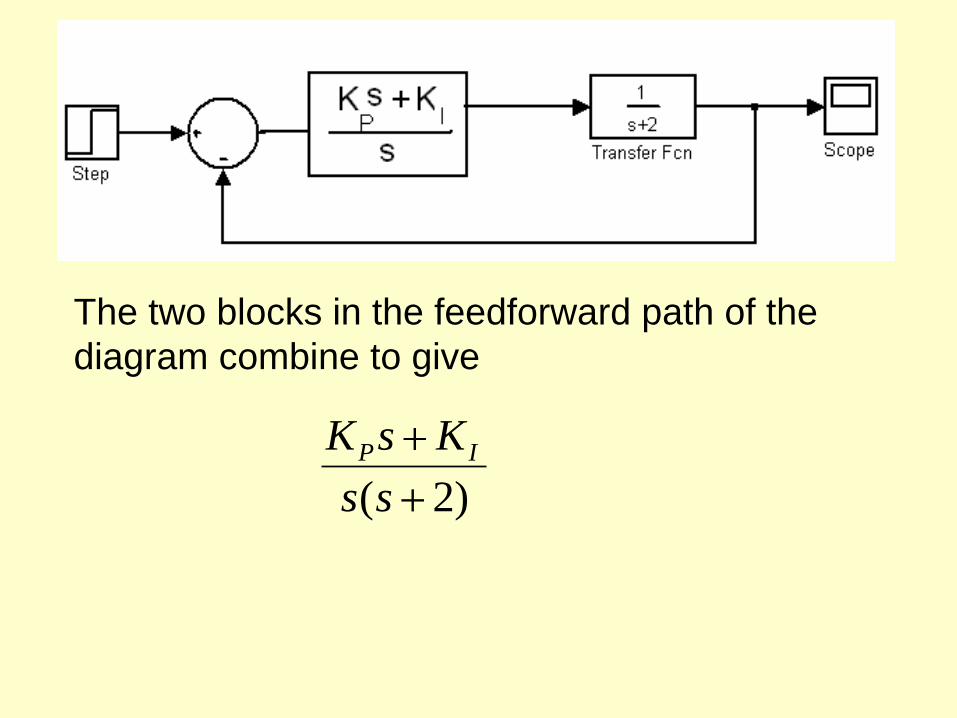
The two blocks in the feedforward path of the
diagram combine to give
)2(ss
KsK IP
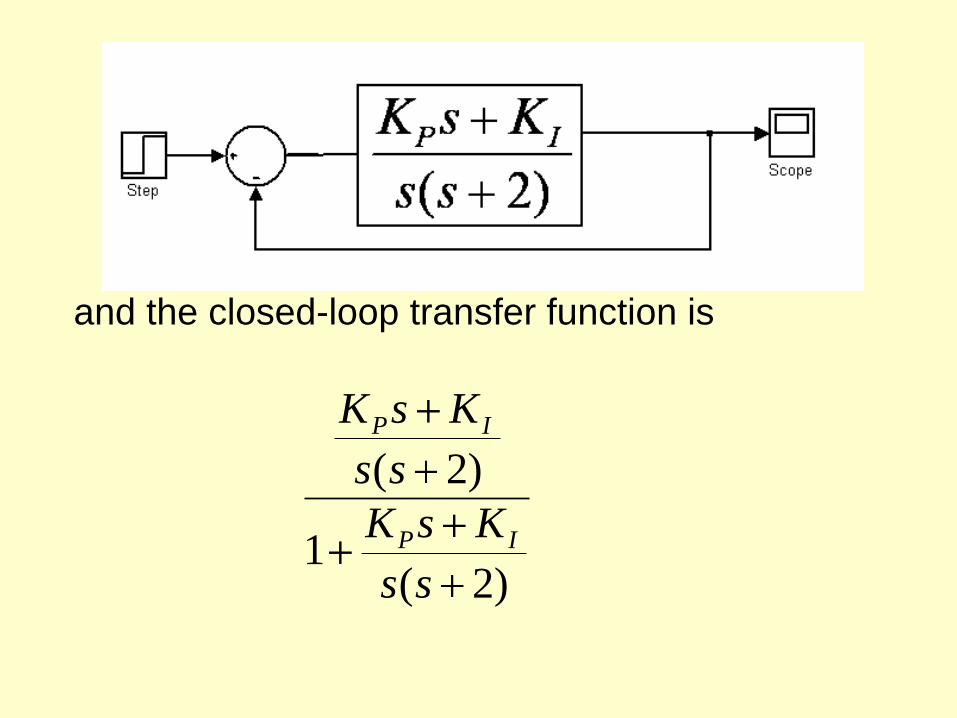
and the closed-loop transfer function is
)2(1
)2(
ss
KsK
ss
KsK
IP
IP

)2(1
)2(
ss
KsK
ss
KsK
IP
IP
IP
IP
KsKss
KsK
)2(
IP
IP
KsKs
KsK
)2(2
IP
IP
KsKs
KsK
)2(2
The characteristic equation is
0)2(2
IP KsKs
It remains to compare this with the desired
characteristic equation
07.499.22 ss
to get 7.4IK
and 99.0PK

Entering these values into the block diagram

The peak time ≈ 2 sec and the overshoot =5%
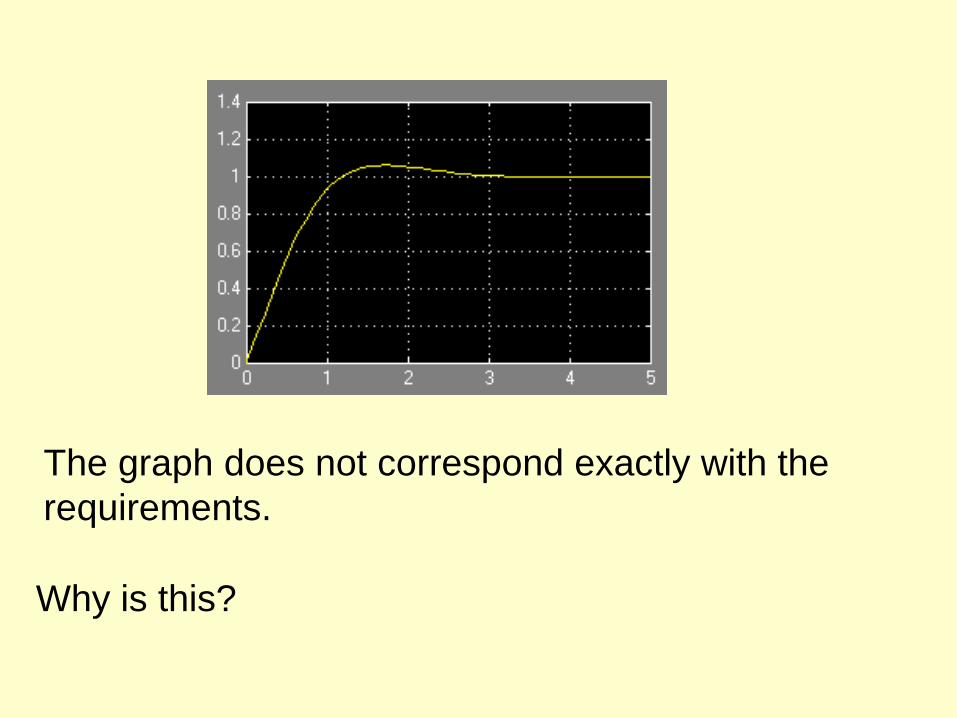
The graph does not correspond exactly with the
requirements.
Why is this?

The required characteristic equation, based on ζ
and ωn is
07.499.22 ss
The corresponding transfer function is
7.499.2
7.42 ss
This goes to 1 in steady state when the output
reaches set point

Putting this transfer function into Simulink

The peak time = 2 sec and the overshoot =5%

The cltf of the PI controller is
IP
IP
KsKs
KsK
)2(2
7.499.2
7.499.02 ss
s
7.499.2
7.499.02 ss
s
It has a zero at
99.0
7.4
75.4

Putting this transfer function into Simulink
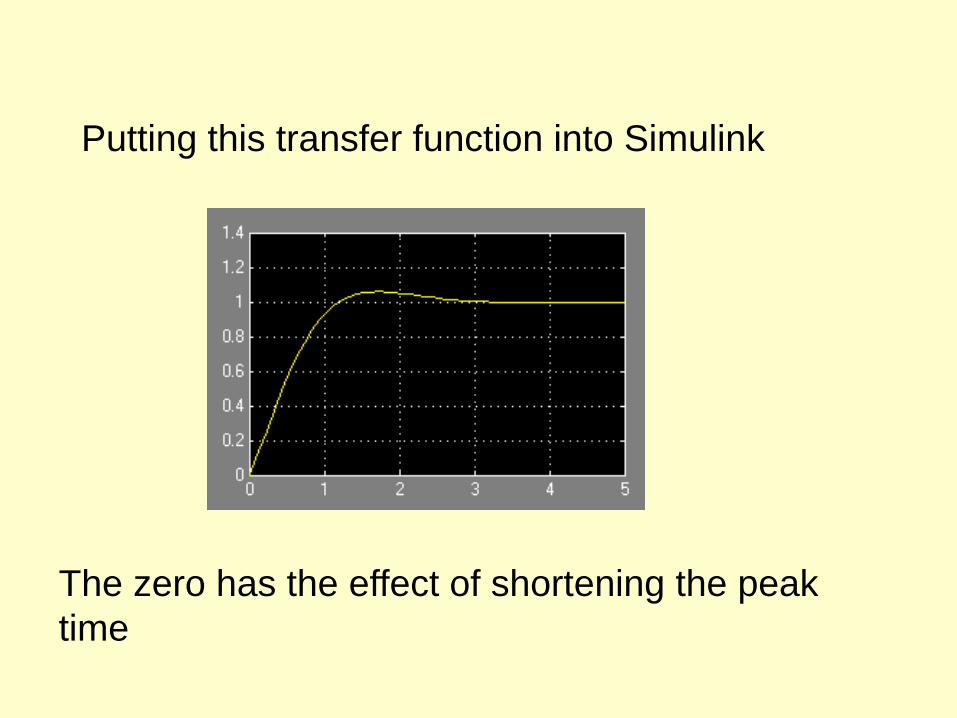
Putting this transfer function into Simulink
The zero has the effect of shortening the peak
time
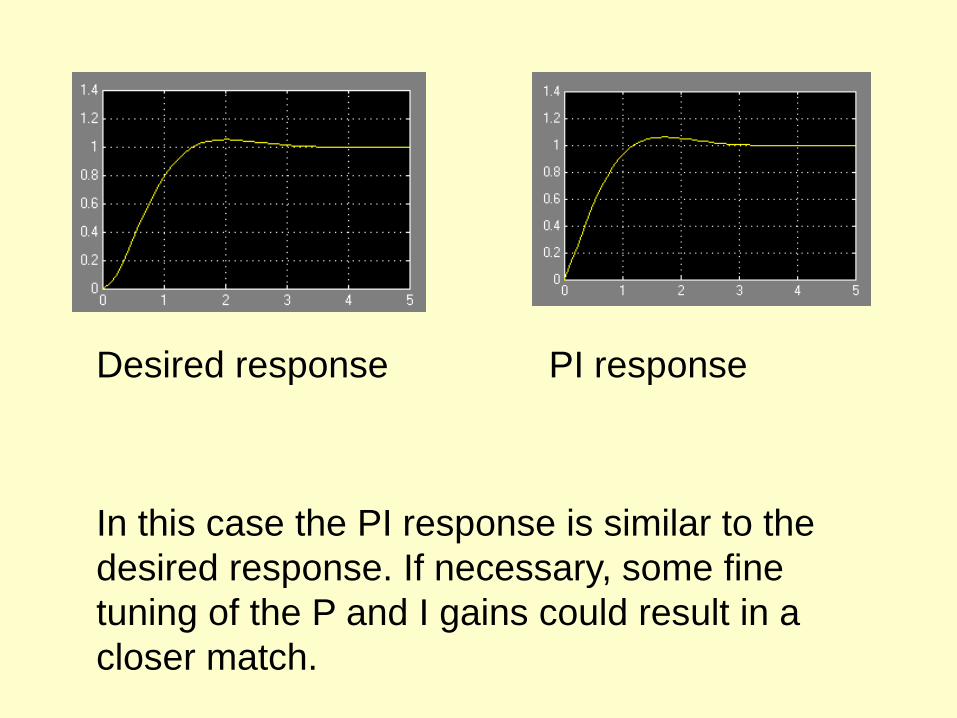
Desired response PI response
In this case the PI response is similar to the
desired response. If necessary, some fine
tuning of the P and I gains could result in a
closer match.

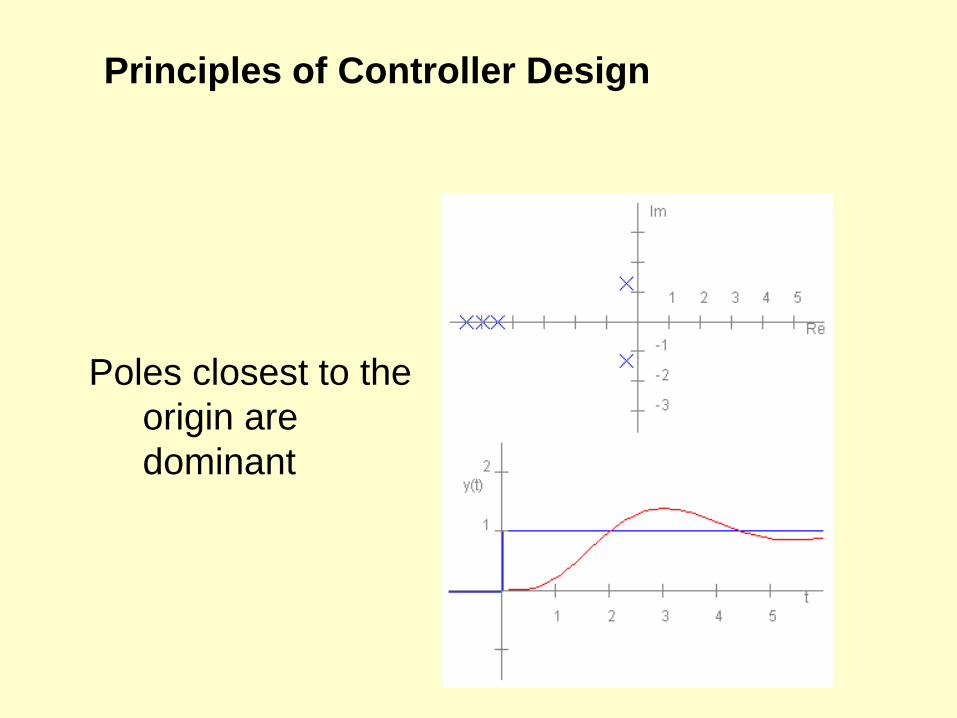
Principles of Controller Design
Controller design in mathematical terms
means the placement of system poles and
zeros
Real poles lead to an
overdamped step
response

Principles of Controller Design
Complex conjugate
poles lead to an
underdamped step
response

Principles of Controller Design
Closed-loop zeros
may cause
overshoot, even if
the system is
overdamped
Principles of Controller Design
Poles closest to the
origin are
dominant

Example 2
Design a PID controller for a plant with transfer
function
)12(
1)(
sssG
The peak time is to be 2 sec and the overshoot
5%

The system block diagram is shown below

We can try the open-loop Ziegler Nichols method
but the system is open-loop unstable, so it
doesn’t work.
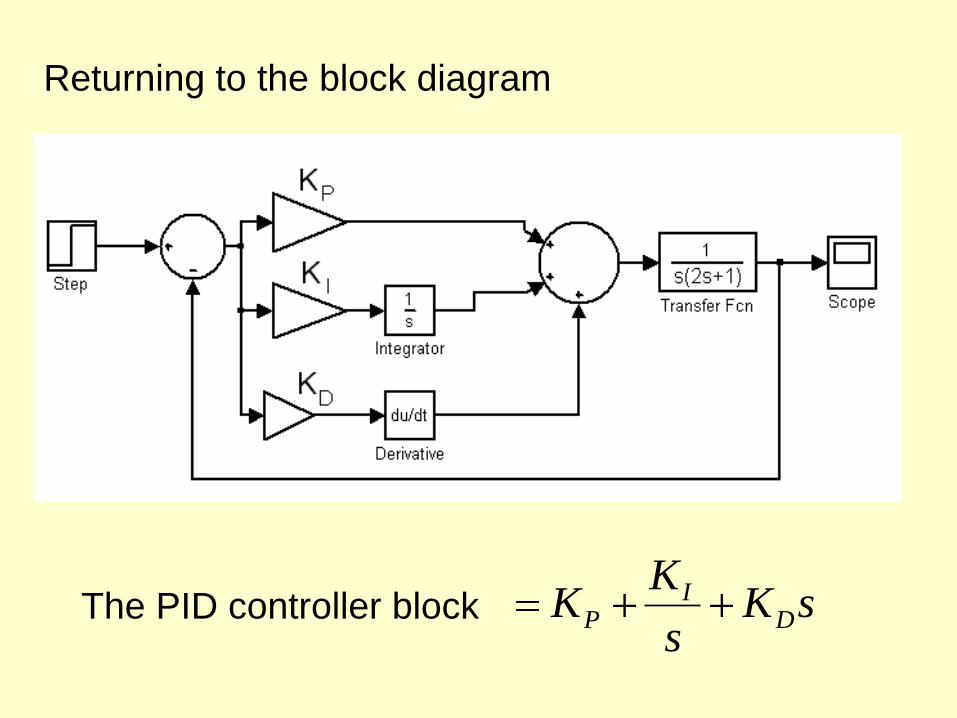
Returning to the block diagram
The PID controller block sKs
KK D
IP
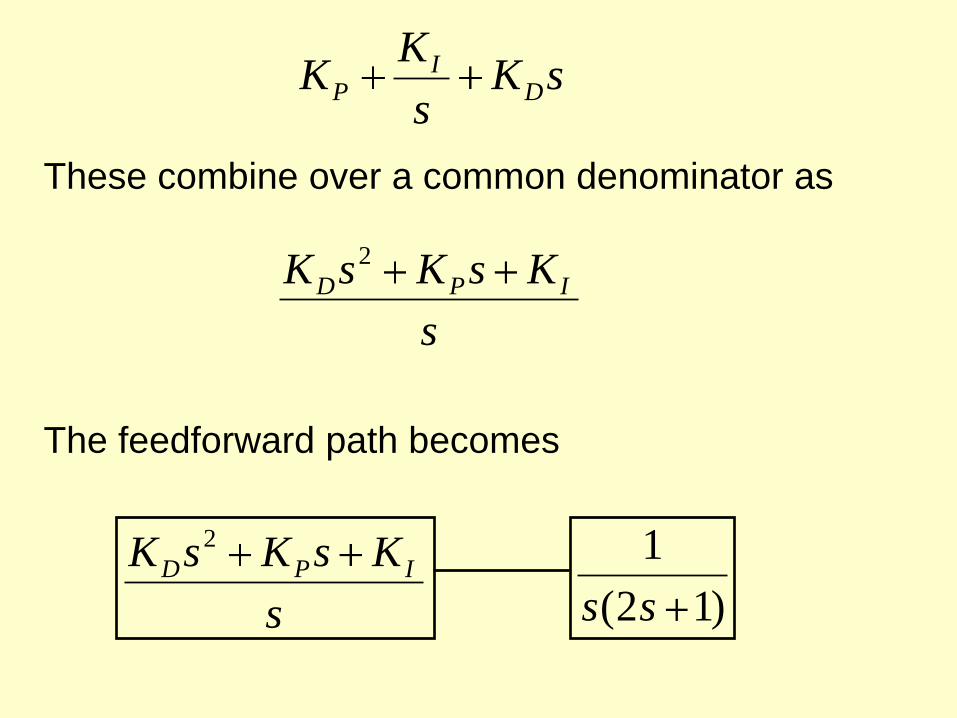
These combine over a common denominator as
sKs
KK D
IP
s
KsKsK IPD
2
The feedforward path becomes
s
KsKsK IPD
2
)12(
1
ss

s
KsKsK IPD
2
)12(
1
ss
and these combine in series to form
)12(2
2
ss
KsKsK IPD
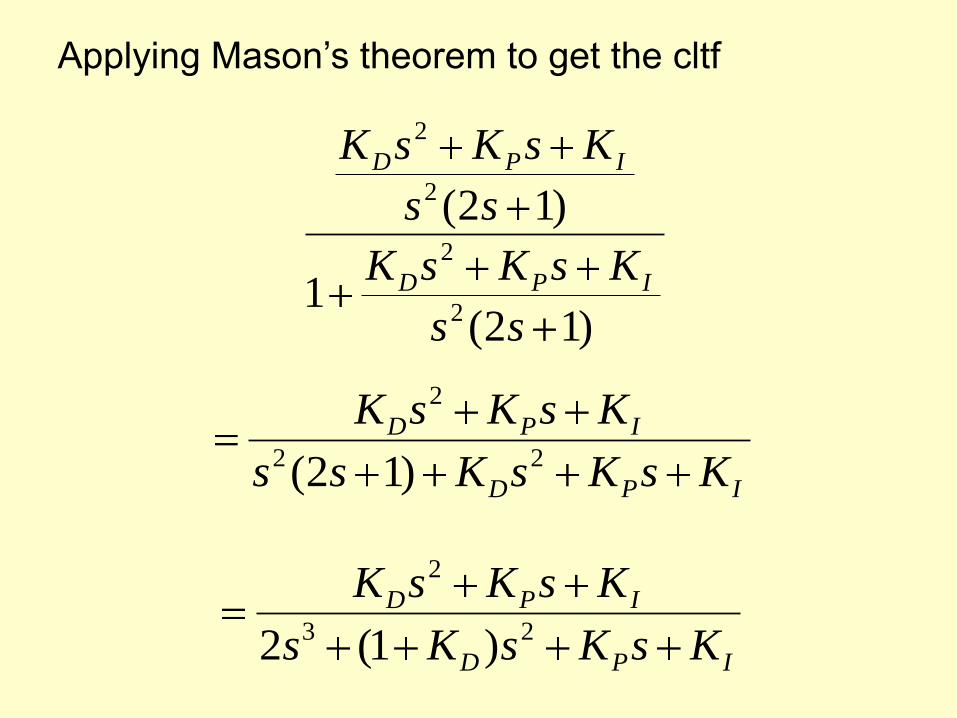
Applying Mason’s theorem to get the cltf
)12(1
)12(
2
2
2
2
ss
KsKsK
ss
KsKsK
IPD
IPD
IPD
IPD
KsKsKss
KsKsK22
2
)12(
IPD
IPD
KsKsKs
KsKsK23
2
)1(2

IPD
IPD
KsKsKs
KsKsK23
2
)1(2
The system characteristic equation is
0)1(2 23
IPD KsKsKs
There are also two system zeros located at the
roots of the numerator equation
02
IPD KsKsK
We need to find the characteristic equation
which has these parameters and then we can
calculate the controller gains by equating
coefficients.
Recall that we are designing a controller with a
peak time of 2 sec and an overshoot of 5%
0)1(2 23
IPD KsKsKs
The system is third order so we will use the
software “exploring the s-plane” to place three
poles to give these characteristics


The poles are located at
,8.1
3.23.1 jand
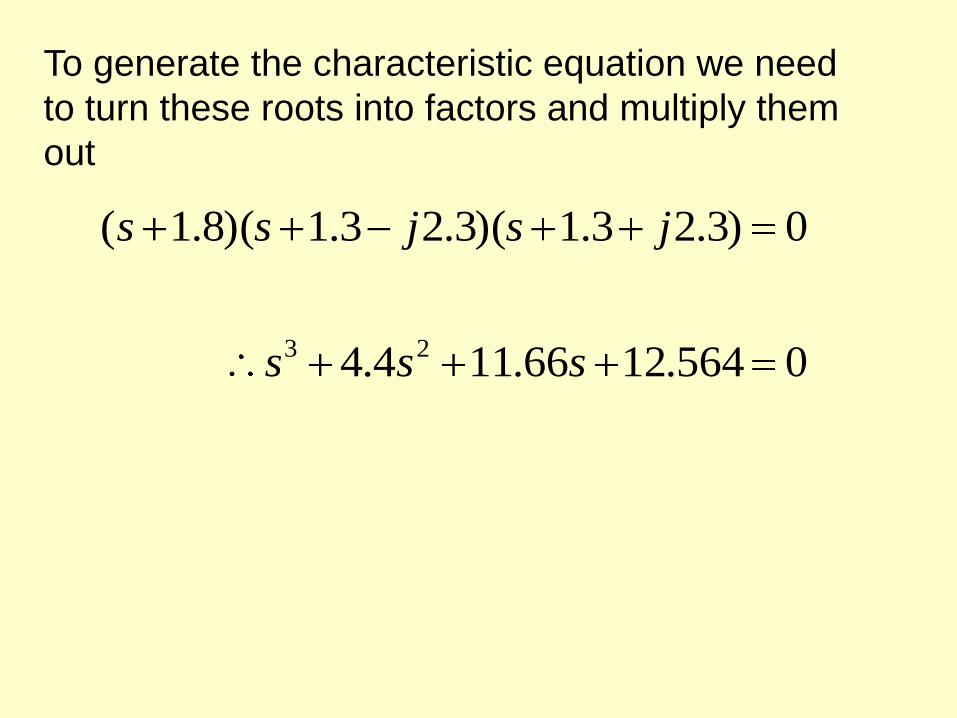
To generate the characteristic equation we need
to turn these roots into factors and multiply them
out
0)3.23.1)(3.23.1)(8.1( jsjss
0564.1266.114.4 23 sss

0564.1266.114.4 23 sss
Now we compare this equation with the
controller characteristic equation
0)1(2 23
IPD KsKsKs
The coefficients of s3 need to be equal so we’ll
multiply the top equation by 2
0128.2532.238.82 23 sss

128.25IK
32.23PK
8.7DK
0)1(2 23
IPD KsKsKs
0128.2532.238.82 23 sss

Putting these gain values into the PID controller

The overshoot is ~ 40% and the peak time ~1 sec
02
IPD KsKsK
The zeros in the numerator of the cltf are increasing
the overshoot so further tuning is required.

We will finish by attempting instead to tune the
system using the Ziegler-Nichols closed-loop
method described in the Control 3 lecture.

1. SET KP. Starting with KP=0, KI=0 and KD=0,
increase KP until the output starts overshooting
and oscillating significantly.
2. Reduce KP to 75% of the value established in
step 1.
3. SET KD. Increase KD until the overshoot is
reduced to an acceptable level
4. SET KI. Increase KI until the final error is
equal to zero.
Recall the rules for the modified Ziegler-Nichols
closed-loop method
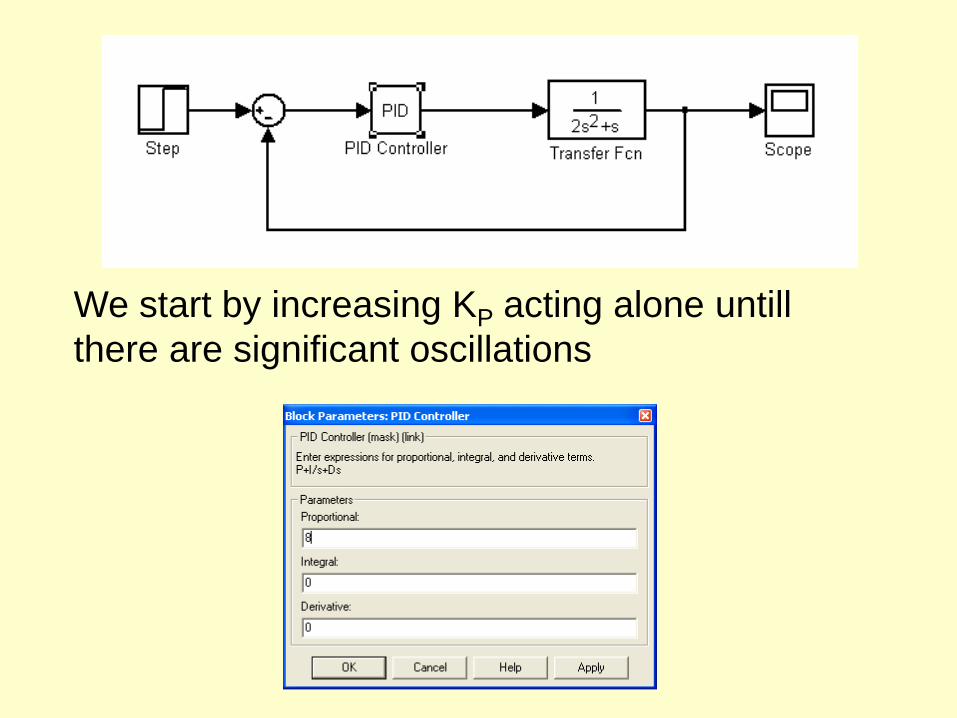
We start by increasing KP acting alone untill
there are significant oscillations

Next we reduce KP to 75% of the previous value
and increase KD to reduce the overshoot
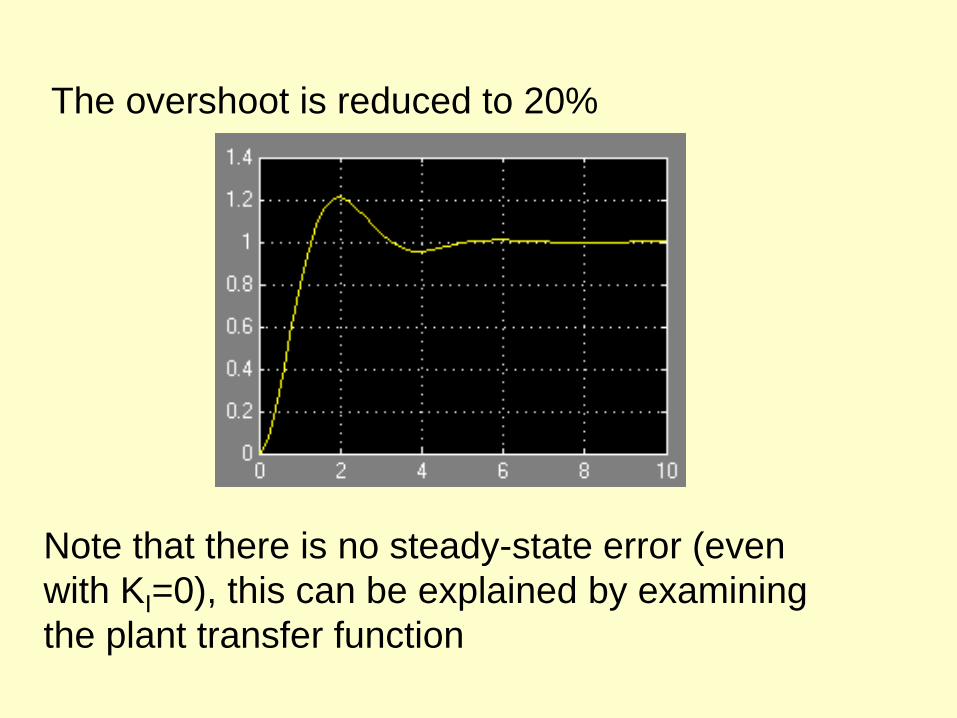
The overshoot is reduced to 20%
Note that there is no steady-state error (even
with KI=0), this can be explained by examining
the plant transfer function

12
12 ss
The cltf
which1 in steady state for a unit step input

12
11
)12(
1
ssss
Viewing this mathematically, the plant transfer
function
already contains an integrator.

Controller tuning strategies
1. Modified Ziegler-Nichols closed-loop
2. Ziegler-Nichols open-loop
3. pole placement
4. trial and error
Whatever method is employed, some further fine
tuning is required . Sometimes the desired
response cannot be achieved for the given plant
and controller.


















