continuum
33
Conservation Laws for Continua e 3 e 1 e 2 Original Configuration Deform ed Configuration S R R 0 S 0 b t n V T(n) y x u(x) or ij j j i b a y y σ b a e 3 e 1 e 2 Original Configuration Deform ed Configuration S R R 0 S 0 n V y x u(x) V 0 Mass Conservation Linear Momentum Conservation 0 0 i i i i const const V v v dV t y t y x x 0 ( ) 0 i i const const v t y t y y y v Angular Momentum Conservation ij ji
description
final review
Transcript of continuum

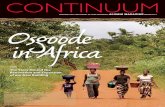
Conservation Laws for Continua
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
R
R0S0b
t
n
V T(n)
yx
u(x)
or ij
j ji
b ay
y σ b a
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
R
R0S0
n
V
yx
u(x)V0
Mass Conservation
Linear Momentum Conservation
0 0i i
i iconst constV
v vdV
t y t y
x x
0 ( ) 0i
iconst const
v
t y t
yy y
v
Angular Momentum Conservation ij ji

( ) 1
2i i i ij ij i iiA V V V
dr T v dA b v dV D dV v v dV
dt
n
Rate of mechanical work done ona material volume
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
R
R0S0b
t
n
V T(n)
yx
u(x)
Conservation laws in terms of other stresses
0 0 0 0ij
j ji
Sb a
x
S b a
0 0 0 0ik jk
j ji
Fb a
x
TF b a
Mechanical work in terms of other stresses
0 0
( )0 0 0
1
2i i i ij ji i iiA V V V
dr T v dA b v dV S F dV v v dV
dt
n
0 0
( )0 0 0
1
2i i i ij ij i iiA V V V
dr T v dA b v dV E dV v v dV
dt
n
Work-Energy Relations

2
0iij ij i i i i i
V
dvD dV dA
dtV V S
dV v b v dV t v
Principle of Virtual Work (alternative statement of BLM)
1
2ji i
ij ijj j i
vv vL D
y y y
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S2R0S0
b
t
Vyx
u(x) S1
ji ii
j
dvb
y dt
If for all iv
Then
i ij jn t 2Son

Thermodynamics
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
R
R0
S0 b
t
Specific Internal EnergySpecific Helmholtz free energy s
Temperature
Heat flux vector q
External heat flux q
First Law of Thermodynamics ( )d
KE Q Wdt
iij ij
iconst
qD q
t y
x
Second Law of Thermodynamics 0dS d
dt dt
Specific entropy s
( / )0i
i
qs q
t y
10ij ij i
iD q s
y t t

Transformations under observer changes
Transformation of space under a change of observer
e3
e1
e2
DeformedConfiguration
b
n
y
DeformedConfiguration
b*
n*
y*
e2*
e3*
e2*
Inertial frame
Observer frame
* *0 0( ) ( )( )t t y y Q y y
All physically measurable vectors can be regarded as connecting two points in the inertial frame
These must therefore transform like vectors connecting two points under a change of observer
* * * * b Qb n Qn v Qv a Qa
Note that time derivatives in the observer’s reference frame have to account for rotation of the reference frame
*** * * * *0
0 0
2 * *2 2 2 * ** * * 2 * *0 0
0 02 2 2 2
( ( )) ( ( ))
( )( ( )) ( ( )) 2 ( )
T
T
dd d dt t
dt dt dt dt
d d td d d d dt t
dt dt dtdt dt dt dt
yy yv Qv Q Q Q y y Ω y y
y yy y Ω ya Qa Q Q Q y y Ω y y Ω
Td
dt
QΩ Q

The deformation mapping transforms as * *0 0( , ) ( ) ( ) ( , )t t t t y X y Q y X y
The deformation gradient transforms as *
*
y y
F Q QFX X
The right Cauchy Green strain Lagrange strain, the right stretch tensor are invariant * * * * *T T T C F F F Q QF C E E U U
The left Cauchy Green strain, Eulerian strain, left stretch tensor are frame indifferent * * * *T T T T T B F F QFF Q QCQ V QVQ
The velocity gradient and spin tensor transform as
* * * 1 1
* * *( ) / 2
T T
T T
L F F QF QF F Q QLQ Ω
W L L QWQ Ω
The velocity and acceleration vectors transform as **
* * * * *00 0
2 * *2 2 2 * ** * * 2 * *0 0
0 02 2 2 2
( ( )) ( ( ))
( )( ( )) ( ( )) 2 ( )
T
T
dd d dt t
dt dt dt dt
d d td d d d dt t
dt dt dtdt dt dt dt
yy yv Qv Q Q Q y y Ω y y
y yy y Ω ya Qa Q Q Q y y Ω y y Ω
(the additional terms in the acceleration can be interpreted as the centripetal and coriolis accelerations)
The Cauchy stress is frame indifferent * Tσ QσQ (you can see this from the formal definition, or use the fact that the virtual power must be invariant under a frame change)
The material stress is frame invariant * Σ Σ
The nominal stress transforms as * 1 1( ) T T TJ J S QF Q Q F Q SQσ σ (note that this transformation rule will differ if the nominal stress is defined as the transpose of the measure used here…)
Some Transformations under observer changes

e3
e1
e2
DeformedConfiguration
b
n
y
DeformedConfiguration
b*
n*
y*
e2*
e3*
e2*
Inertial frame
Observer frame
Objective (frame indifferent) tensors: map a vector from the observed (inertial) frame back onto the inertial frame
t n σ
* *T T σ QσQ D QDQ
Invariant tensors: map a vector from the reference configuration back onto the reference configuration
0 T m Σ
* Σ Σ
Mixed tensors: map a vector from the reference configuration onto the inertial frame
d dy F x
* F QF
Some Transformations under observer changes

Constitutive Laws
General Assumptions:1.Local homogeneity of deformation (a deformation gradient can always be calculated)2.Principle of local action (stress at a point depends on deformation in a vanishingly small material element surrounding the point)
Restrictions on constitutive relations: 1. Material Frame Indifference – stress-strain relations must transform consistently under a change of observer 2. Constitutive law must always satisfy the second law of thermodynamics for any possible deformation/temperature history.
Equations relating internal force measures to deformation measures are knownas Constitutive Relations
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
10ij ij i
iD q s
y t t

Fluids
Properties of fluids• No natural reference configuration• Support no shear stress when at rest
Kinematics• Only need variables that don’t depend
on ref. config
Conservation Laws
e3
e1
e2
DeformedConfiguration
S
R
b
t
y
iij
j
vL
y
( ) / 2 ( ) / 2ij ij ij ij ij ji ij ij jiL D W D L L W L L k
i ijk ijk ijj
vW
y
1 1( ) 2 ( )
2 2
k i i i
k
i i k i i ii ik k ik ik k
kx const y const y const y const
ik k ik k k k ijk j k
i iy const
v v y v v va L v D W v
t y t t t t
vv v W v v v v
y t y
0 or 0ikk
iconst const
vD
t t y
x y
i
ji i ii k ij ji
j k y const
v vb v
y y t
iij ij
iconst
qD q
t y
x
10ij ij i
iD q s
y t t

General Constitutive Models for Fluids
Objectivity and dissipation inequality show that constitutive relations must have form
Internal EnergyEntropyFree EnergyStress response functionHeat flux response function
ˆ( , ) ˆ( , )s s
ˆ ( , ) s
ˆ ˆ ˆ( , , ) ( , ) ( , , )visij ij ij eq ij ij ijD D
ˆ , , ,i i iji
q q Dy
In addition, the constitutive relations must satisfy
2
2 2
22
2 2 2
ˆˆ ˆ
ˆ ˆ ˆˆˆ
ˆˆ
eq
eq eqeq
eqvv
s
s
cc
( , , ) 0 , , 0vis
ij ij ij ii i
D D qy y
ˆ( , )vc
where

Constitutive Models for Fluids
ˆ ( ) ( )ij eq ij Elastic Fluid
0log log( 1)v v v ij ij ij
pc c c R s p R
Ideal Gas
ˆ ( , ) ( ( , ) ( , ) ) 2 ( , )( / 3)ij eq kk ij ij kk ijD D D Newtonian Viscous
1 1 2 3 2 1 2 3 3 1 2 3
ˆ ( , )
( , ) ( , , , , ) ( , , , , ) ( , , , , )ij eq ij ij ij ik kjI I I I I I D I I I D D
Non-Newtonian
ˆ ˆ ˆ( , , ) ( , ) ( , , )visij ij ij eq ij ij ijD D ˆ ( , ) s

Derived Field Equations for Newtonian Fluids
1( )
2i k
ji i i ii i i k k k ijk j k
j k iy const y const
v v vb a a v v v v
y y t t y
Combine BLM
With constitutive law. Also recall
Compressible Navier-Stokes 2 ( , ) / 3 ( , ) ( , )ij kk ij i i eq kki j
pD D b a p D
y y
221 2
3eq ji
i ii j j j i
vvb a
y y y y y
With density indep viscosity
1( )
2k
eq ii k k ijk j k
i iy const
vb v v v
y t y
For an elastic fluid (Euler eq)
21 ii i
i j j
vpb a
y y y
For an incompressible Newtonianviscous fluid
1
2ji
ijj i
vvD
y y
0i
i
v
y
Incompressibility reduces mass balance to
0 or 0ikk
iconst const
vD
t t y
x yMust always satisfy mass conservation
Unknowns: , ip v

Derived Field Equations for Fluids
2 2 2
2
1 2( )
3i k l k i
ijk ijk k ij j ij j j l l l k j k const
v v vb D
y y y y y y y y y t
x
Vorticity transport equation (constant temperature, density independent viscosity)
For an elastic fluid
ki ijk ijk ij
j
vW
y
Recall vorticity vector
( ) k iijk k ij j i
j k const
vb D
x y t
x
2( )i i
ijk k ij jj j j const
b Dy y x t
xFor an incompressible fluid
k i kijk ij j i
j kconst
a vD
y t y
x
If flow of an ideal fluid is irrotational at t=0 and body forces are curl free, then flow remains irrotational for all time (Potential flow)

Derived field equations for fluids
• Bernoulli1
constant2
eqi iH v v
along streamline
For an elastic fluid
For irrotational flow1
constant2
eqi iH v v
everywhere
For incompressible fluid 1constant
2 i ip
v v

Normalizing the Navier-Stokes equation
21 1( )
2k
i ii k k ijk j k
i j j iy const
v vpb v v v
y y y t y
Characteristic length
Characteristic velocity
Characteristic frequency
P Characteristic pressure change
L
V
f
Normalize as
2
2
ˆ ˆ ˆˆ 1 1 ˆ ˆEu Stˆˆ ˆ ˆ ˆRe Fr
k
i i ii i
i j j iy const
v v vpb v
y y y t y
Re /VL Reynolds number
Incompressible Navier-Stokes
ˆ
ˆ
ˆ
ˆ P
ˆ
i i
i i
i
y Ly
v Vv
t ft
p p
b gb
Euler number 2Eu /P V
Froude number Fr /V gL Strouhal number St /fL V
V
L

Limiting cases most frequently used
2
ˆ ˆˆ 1 ˆ ˆEu Stˆˆ ˆFr
k
i ii i
i iy const
v vpb v
y t y
Ideal flow Re
Stokes flow
2 ˆ ˆˆ 1 ˆˆˆ ˆ ˆRe
k
i ii
i j j y const
v vpb
y y y t
2
2
ˆ ˆ ˆˆ 1 1 ˆ ˆEu Stˆˆ ˆ ˆ ˆRe Fr
k
i i ii i
i j j iy const
v v vpb v
y y y t y
0V
1( )
2k
eq ii k k ijk j k
i iy const
vb v v v
y t y
21
k
i ii
i j j y const
v vpb
y y v t

Governing equations for a control volume (review)
B
R
Solving fluids problems: control volume approach

Example
v0
v1
v2
A0
A2
A1
A3
A4
A5
ji
Steady 2D flow, ideal fluidCalculate the force acting on the wallTake surrounding pressure to be zero
( )B R R B
ddA dV dV dA
dt n σ b v v v n
3
20 0 0 0 0( ) sin ( ) 0
A A
p dA A v p p dA n j j j j
20 0 0 sinA v F j

Exact solutions: potential flow
20 0i
i i i
v
y y y
Mass cons
Bernoulli1
constant2 i i
pv v
t
If flow irrotational at t=0, remains irrotational; Bernoulli holds everywhere
Irrotational: curl(v)=0 so ii
vy
V
e1
e2
a2
2
( )( )( )
a V y V tr y V t y V t
r

Exact solutions: Stokes Flow
Vy2
y1
h
Steady laminar viscous flow between platesAssume constant pressure gradient in horizontal direction
22 2 1
2
( )2
2
y pV y h y
h L
V p hy
h L
v e
σ
2 2
22
10
k
i ii
i j j y const
v vp p fb
y y v t L y
Solve subject to boundary conditions

Exact Solutions: AcousticsAssumptions:
Small amplitude pressure and density fluctuationsIrrotational flowNegligible heat flow
Mass conservation:
ss const
pc
For small perturbations: 2
sp
ct t
k
ii
i y const
vpb
y t
Approximate N-S as:22
2k
i
i y const
vp
y t t
0i
iconst
v
t y
x
22
k
ii
i i i y const
vpb
y y y t
22 22 2
2 20 0
jis s
i j i i
vvc c
y y y yt t
Combine:
(Wave equation)

Wave speed in an ideal gas
i
iconst
qsq s const
t y
xEntropy equation:
0log logv v vc c c R s p R
/0 0log log exp[( ) / )vR c
v vs c R s s s c
Hence:
Assume heat flow can be neglected
1s
s const
p pc k R
/ 1vR c p k so

Application of continuum mechanics to elasticity
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
RR0
S0 b
t
u
x
y
Material characterized by
Modulus G' (N/m2)
(frequency)-1
109
105
GlassyViscoelastic
Rubbery
MeltGlass Transitiontemperature Tg

General structure of constitutive relations
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
RR0
S0 b
t
u
x
y
0
0
ˆ ˆˆ ˆ2
ˆ ˆ2
ijij
ij
ij
sC
s
C
0kk
Qx
iij ij
j
uF
x
ij ki kj
ij ik jk
C F F
B F F
1
i ik kQ JF q
1 1ij ik kjJ JFS S F σ
1 1 1Tij ik kl jlJ JF F Σ F Fσ
0 0i
ji ii
j x const
S vb
x t
01 1
02 ij ij i
iC Q s
x t t
* F QF
* Σ Σ
* * *
* * *
T T
T
B F F QBQ
C F F C
Frame indifference, dissipation inequality

Forms of constitutive relation used in literature
1
2 22 1 1
23
trace( )
1 1
2 2
det
kk
ik ki
I B
I I I B B
I J
B
B B
B
11 2 / 3 2 / 3
2 222 1 14 / 3 4 / 3 4 / 3
=
1 1
2 2
det
kk
ik ki
BII
J J
B BII I I
J J J
J
B B
B
1 2 3 1 2 1 2 3ˆ( ) ( ) ( , , ) ( , , ) ( , , )W W U I I I U I I J U F C
• Strain energy potential 0W
1ij ik
jk
WF
J F
1 31 2 2 33
22ij ij ik kj ij
U U U UI B B B I
I I I II
1 1 22 /3 4 /31 2 1 2 2
2 1 12
3ij
ij ij ik kj ijU U U U U U
I B I I B BJ I I I I I JJ J
(1) (1) (2) (2) (3) (3)31 2
1 2 3 1 1 2 3 2 1 2 3 3ij i j i j i j
U U Ub b b b b b
2 (1) (1) 2 (2) (2) 2 (3) (3)1 2 3 B b b b b b b

Specific forms for free energy function
• Neo-Hookean material21 1
1( 3) ( 1)2 2
KU I J
• Mooney-Rivlin 21 2 11 2( 3) ( 3) ( 1)
2 2 2
KU I I J
115/ 3
11
3ij ij kk ij ijB B K JJ
21 215/3 7 /3
1 1 1[ ] 1
3 3 3ij ij kk ij kk ij kk ij ik kj kn nk ij ijB B B B B B B B B K JJ J
• Generalized polynomial function 21 2
1 1
( 3) ( 3) ( 1)2
N Ni j ii
iji j i
KU C I I J
211 2 32
1
2( 3) ( 1)
2i i i
Ni
ii
KU J
• Ogden
22 31 1 12 4
1 1 11( 3) ( 9) ( 27) ... 1
2 220 1050
KU I I I J
• Arruda-Boyce

Solving problems for elastic materials (spherical/axial symmetry)
r
eR
ee
e1
e2
e3
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
rr rr rrF B
F B
F B
σ F B
2 2
rr rrdr r dr r
F F F B B BdR R dR R
• Assume incompressiblility
• Kinematics
2
1dr r
dR R
3 3 3 3r a R A
21 21
1 2 1 2 2
21 21
1 2 1 2 2
22
3 3
22
3 3
rr rr rrI IU U U U U
I B B pI I I I I
I IU U U U UI B B p
I I I I I
• Constitutive law
01
2 0rrrr r
db
dr r • Equilibrium (or use PVW)
( ) ( )r a r bu a g u b g
(gives ODE for p(r)
( ) ( )rr a rr ba t b t • Boundary conditions

Linearized field equations for elastic materials
2
2
* *1 2
1( )
2
( ) on ( ) on
j ij jiij ij ijkl kl kl j
j i i
i i ij i j
u uuC b
x x x t
u u t R n t t R
e3
e1
e2
OriginalConfiguration
DeformedConfiguration
S
R
R0
S0 b
t
2 2ˆ ˆij ijijkl ij
kl ij kl ij
U UC
Elastic constants related to strain energy/unit vol
Approximations:• Linearized kinematics• All stress measures equal• Linearize stress-strain relation
1ij ij kk ij ijT
E E
1 1 2 1 2ij ij kk ij ijE E T
Isotropic materials:
( )T σ C ε αT ε Sσ α

Elastic materials with isotropy
11 11
22 22
33 33
23 23
13 13
12 12
1 0 0 0
1 0 0 0 11 0 0 0 1
1 2 10 0 0 0 02 2 0(1 )(1 2 ) 1 2
1 22 00 0 0 0 0
22 0
1 20 0 0 0 0
2
E E T
11 11
22 22
33 33
23 23
13 13
12 12
1 0 0 0 1
1 0 0 0 1
1 0 0 0 110 0 0 2 1 0 02 0
0 0 0 0 2 1 02 0
0 0 0 0 0 2 12 0
TE
1ij ij kk ij ijT
E E
1 1 2 1 2ij ij kk ij ijE E T

Solving linear elasticity problems spherical/axial symmetry
R
eR
ee
e1
e2
e3
0 0 0 0
0 0 0 0
0 0 0 0
RR RR
1 2 1
1 11 1 2 1 2RR
duE E TdR
u
R
01
2 0RRRR R
db
dR R
• Constitutive law
22
02 2 2
1 1 1 22 2 1( )
1 1
d u du u d d d TR u b R
R dR dR dR dR EdR R R
• Equilibrium
RRdu u
dR R • Kinematics
( ) ( )r a r bu a g u b g
( ) ( )rr a rr ba t b t • Boundary conditions

Some simple static linear elasticity solutions
2
2 3
2 3
(1 )(3 4 )
8 (1 )
3(1 )(1 2 )
8 (1 )
31(1 2 )
8 (1 )
k k ii i
k k i j k k ij i j j iij
k k i j i j j i ij k kij
P x xu P
E R R
P x x x P x P x P x
R RE R R
P x x x P x P x P x
RR R
04
ii
P
R
Point force in an infinite solid:
Point force normal to a surface:
e1
P
e3
R3
3(1 ) (1 2 )(1 )
log( )ii R x
R
3 333
3
(1 ) (1 2 )(3 4 )
2i i i
i ix x xP
uE R R x RR
2
3 233 3 3 3 3 32 3 2 2
3 3
(1 2 )(2 ) (1 2 )3
2 ( ) ( )
i jij i j ij i j j i i j ij
x x x R xP Rx x x x x x
R R R R x R x
2 2 20
0 2
1
1 2k i i i
k i k k
u u b u
x x x x t
Navier equation:
2(1 ) 1
4(1 )i i k ki
u xE x
Potential Representation (statics): 2 2
0 0i
i i ij j k k
b b xx x x x

Simple linear elastic solutions
a
e2
e1
e3
30 0
3 3 3 33
3 2 22 2 2 20 0 33 3 2
(1 ) (1 ) (5 1)5
(1 ) 2(1 2 )(7 5 )
(1 ) (1 ) 3(7 5 )(3 )
(1 ) 2(1 2 )(7 5 )
i i i ia
x x xR
a x ax R R a
R R
3 50
3 33 5
23 53
3 5 2
(1 ) 5(5 4 ) 62
2 (7 5 ) (7 5 )
52 (5 6) 31
(1 ) (7 5 ) (7 5 )
i i
i
a au x
E R R
xa ax
R R R
3 23 2 23
3 2 5 2 20
33 5 23 3 3 3 3
3 5 5 2
333 5 4 6 5 5 10
2(7 5 ) 2(7 5 )
15 ( )(7 5 ) 5(1 2 ) 3
(7 5 ) (7 5 )
ij i jij
i j j i i j
a x x xa a a
R R R R R
a x x xa a a
R R R R
33 0 Spherical cavity in infinite solid under remote stress:

Dynamic elasticity solutions
( )i i k ku a f ct x p Plane wave solution
2 2 20
0 2
1
1 2k i i i
k i k k
u u b u
x x x x t
Navier equation
20 0
1 2k i i kc a p a p
2 22 00 /i ia p c c Solutions:
2 202 (1 ) / (1 2 )i i La p c c