1 MODELING Solution-Phase Nonlinear Dynamics Heterogeneous Dynamics.
Constructive Nonlinear Dynamicsin
Process Systems Engineering
Wolfgang Marquardt and Martin Mönnigmann
Process Systems EngineeringRWTH Aachen University
ESCAPE-14, Lisbon, May 16-19, 2004
1Constructive Nonlinear Dynamics in Process Systems Engineering
Nonlinear Analysis of Chemical Process Systems
• Chemical reactorsBilous & Amundsen (1955), van Heerden (1958),Aris & Amundsen (1958), Razon & Schmitz (1987), ...Altimari et al. (2004)
• Distillation columnsPetlyuk & Avet'yan (1971), Michelsen & Villadsen (1979), Kienle & Marquardt (1991), Jacobsen & Skogestad (1991), Bekiaris et al. (1993), Kienle et al. (1994), ..., Li et al. (2004)
• Reactive distillation columnsPisarenko et al. (1987), Jacobs & Krishna (1993),Nijhuis et al. (1993), Ciric & Miao (1994), ...
• Reactor-Separator processes with recycleBildea & Dimian (1998), Kiss & Bildea (2002, 2003),Zeyer et al. (2003), Balasubramanian et al. (2003), ... , Bildea et al. (2004), Schmidt & Jacobsen (2004)
2Constructive Nonlinear Dynamics in Process Systems Engineering
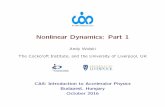
Example: Ammonia Reactor
Zeit [min]
Tem
pera
tur [
C]
1916:first industrial process(Bosch, BASF)
1997:global production>100 mio t/year
Nonlinear modelwith temperature coupling
Simulatedtemperature waves
Understandingnonlinear dynamics
>80 years later
Influence of preheateron root locus
Morud, Skogestad(1998)
Large scaleindustrial process
Temperature recordings ofindustrial ammonia reactor
3Constructive Nonlinear Dynamics in Process Systems Engineering
Example: Decanting Reactor
D
Phase IPhase II C
A
DB E
EF
B
E
++
+
+
C
A, B : Educts
D : Main productC : Catalyst
E, F : By-product
Liquid/LiquidReactor
ComplexNonlinear Dynamics
H: HopfHV: HysteresisDL: Double LimitBL: Boundary LimitDH: Degenerate HopfHH: Hopf-HopfDZ: Double ZeroBH: Boundary Hopf HL: Hopf-Limit
Coolant average temperature Θm[-]
Coo
ling
capa
city
∆ [−
]
Phase I : A, B, C Phase II : B, D, E
B, C, D, E, FLC
Phase II
TC
(b) periodicoscillations
(as one example)
Luss et al.(1998)
(a) multiple steady states
Rea
ctor
tem
pera
ture
Θ [−
]
Coolant average temperature Θm[-]
„simple" process
4Constructive Nonlinear Dynamics in Process Systems Engineering
Example: Heteroazeotropic Rectification
0 40 800.8
0.85
0.9
0.95
D [ml/h]120
xB,E ExperimentSimulation
A
B
Column with decanterethanole / water / cyclohexane
DF
xB,E
0
333
338
343
348
Tem
pera
tur [
K]
20 40 60 80 Zeit [h]
T8
T4
T1
A B A
353
• SimulationMagnussen et al. (1979)
• TheoryPetlyuk and Avet'yan (1971)Bekiaris et al. (1996)
• Experimental verificationMüller and Marquardt (1997)
5Constructive Nonlinear Dynamics in Process Systems Engineering
Example: Reactor-Separator Recycle ProcessKiss and Bildea (2002, 2003)
• unique steady-state for isothermalstand-alone reactor
• feasibility constraint, Da > Dacr,for isothermal reactor-separatorrecycle process
stand alone CSTR
CSTR-seperator-recylce
Rea
ctio
nco
nver
sion
Damkoehler number
Dacr
Rea
ctio
nco
nver
sion
Damkoehler number
Monomerfeed
Recycle
TC
Sepa
ratio
n
CC
CC
Product
Coolant
CC
Initiatorfeed
PFR
Multiplicity for non-isothermal polymerization process wit PFR-separator recycle
6Constructive Nonlinear Dynamics in Process Systems Engineering
Bifurcation Analysis
continuation
stability analysis
(steady-state) simulation
continuation and local stability analysis
singularity analysis and unfolding
||x||
pi
pj
• large-scale DAE systems• two-parameter continuation• stability analysis via test functions• ...but ...• only few parameters• not part of process modelling software• not constructive
analytical and numerical techniques ... dynamicsimulation
7Constructive Nonlinear Dynamics in Process Systems Engineering
From Analysis to Synthesis
Ramirez & Gani (2004)
Process synthesis
Find (process structure,) designparameters and operating point such that
- profit is maximized
- quality and safety constraintsare fulfilled
How to considerNonlinear Dynamics?
),(0),(0..
),(max,
αα
αφα
xgxfts
xx
≤=
Nonlinear programming problem
Synthesis
Analysis
8Constructive Nonlinear Dynamics in Process Systems Engineering
Conceptual Problem Formulation (1)
• model of open-loop or closed loop process system with given structure
- large-scale system of (index one) DAEs- time-varying inputs u(t), references r(t), or disturbances d(t)- process, equipment, model ... parameters, subject to uncertainty
• simplifying assumptions
- only differential equations (for this presentation)- u(t), r(t), d(t) vary much slower than plant dynamics
0)0(,),( xxxfx == η&
... a parametric dynamic process model
9Constructive Nonlinear Dynamics in Process Systems Engineering
Conceptual Problem Formulation (2)
Steady-state process design by optimization
• parameter space with different types of regions• regions separated by critical manifolds• a design is a point in parameter space
• formulate and solve optimizationproblem with cost function, processmodel and inequality constraints(feasibility, stability etc.)
• optimal solution: η = η∗, x=x*
),(0..
),(min,
η
ηφη
xfts
xx
=
unstable
stable
η1
η2
feasible
infeasibleη1
η2 η1
η2P
(i) stability boundary
(ii) feasibility boundary
(i) + (ii)
10Constructive Nonlinear Dynamics in Process Systems Engineering
Optimization Problem Formulations
Optimization with respect to cost function φ, model and ...
without stability or feasibility constraints
),(0..
),(min,
η
ηφη
xfts
xx
=
η1
η2
optimum
feasible but not stable
with stability or feasibility constraints
Pxfts
xx
∈=
ηη
ηφη
),(0..
),(min,
η1
η2P
optimum
stable and feasible, but not robust to parametric
uncertainty
PRxfts
xx
⊆= ),(0..
),(min,
η
ηφη
with robust stability and feasibility constraints
stable, feasible and robust to parametric
uncertainty
η1 = α2
η2 = α2
P
R optimum
profit loss
11Constructive Nonlinear Dynamics in Process Systems Engineering
Leveraging the Profit Loss
• Quantification of loss
– to specific parametric uncertainty,
– to specific stability or feasibility constraint
• Reduction of the loss by structural modifications
– implementation or modification of feedback control system
– modification of the process structure
• Reduction of the loss by reduction of parametric uncertainty
12Constructive Nonlinear Dynamics in Process Systems Engineering
Parameterization of Uncertainty ... a deterministic rather than a stochastic setting
Approximated robustness box • Ellipsoid overestimates
parametric uncertainty• Kreisselmeier-Steiner function
underestimatesparametric uncertainty
• Biegler, Rooney (2001)
∆α2
∆α1
α1
r
α2specialization and approximation
Robustness manifold• arbitrary connected smooth manifold• r normal to both, the critical and the
robustness manifold• high computational effort
rα2
α1
13Constructive Nonlinear Dynamics in Process Systems Engineering
Parametric Distance to a Critical Manifold
x
α1 α2α1
α2
α2(0)
α1(0)
∆α1
∆α2
• Normal vector to nearest saddle-node and Hopf bifurcation points (Dobson, 1993)
• Normal vector to general critical manifolds, simplificationof defining equations (Mönnigmann & Marquardt, 2002)
14Constructive Nonlinear Dynamics in Process Systems Engineering
Normal Vector Equation SystemsSaddle-node bifurcation
augmented system
vfrvvvf
f
T
T
x
α−=−=
==
010
00
Hopf bifurcation
augmented system
)2()2()1()1(
)2()2()1()1(
)1()2()2()1(
)2()2()1()1(
)1(2
)2(1
)1()2(
)2(2
)1(1
)2()1(
)2()1(
)1()2(
)2()1(
000
100000000
wfvwfvufrwfvwfvuf
wvwvwvwv
wwvvfwwvvf
wwww
wwfwwf
f
xT
xTT
xxT
xxTT
x
TT
TT
Tx
Tx
T
T
x
x
ααα
γγωγγω
ωω
++−=++=
−=−+=
+++=−+−=
==
−=+=
=
2n +2m+ 2n + 1Feasiblityconstraint
2n + m + 12n + 2Isola
4n + m + 43n + 3Cusp
6n + m + 43n + 2Hopf
2n + m + 12n + 1Saddle node
normal vectorsystem
augmentedsystem
15Constructive Nonlinear Dynamics in Process Systems Engineering
Optimization under Uncertainty – the General Case
number and types of critical manifolds:• feasibility constraints (e.g. safety, quality, equipment ...)• stability boundaries (Hopf and saddle-node bifurcations)• performance constraints (eigenvalue sectors)• higher codimension bifurcations
(cusp, isola, non-transversal Hopf, ... bifurcations)
KkIi
l
mrl
rl
rxF
xf
x
i
ii
iieqi
iiiik
eqeq
eqeq
lx ieqeq
∈=≥
≥
+=
=
=
)(
)(
,,10
),,(0
),(0
,max
)(
)()(
)()()(
)()()()(
)()(
)()(
,, )()()(
K
ααα
α
αφα
cost function
normal vector r(i) to critical manifold i
normal distance between designand critical manifold i
steady state (x(eq), α(eq) )
minimal normal back-off
16Constructive Nonlinear Dynamics in Process Systems Engineering
Complicated Real Situations
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
��
��
����
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
����
����
??
?
location of critical manifolds usually unknown a priori
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
��
test function may fail to detect crossing of critical manifold
critical manifolds have to be detected as the optimization proceeds
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇ
��
1
2
����
������
ÇÇÇÇÇÇ
ÇÇÇÇÇÇ
ÇÇÇÇÇÇ
ÇÇÇÇÇÇ
ÇÇÇÇÇÇ
1
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ ��
2
1
(i) (ii)
different critical manifolds may result in more than one normal vector constraint
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
��
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
2
1
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
��
��
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
2
1
(i) (ii)
17Constructive Nonlinear Dynamics in Process Systems Engineering
Overview on Algorithm
(i) initialization
(ii) update set of locally closest points
initialization with steady state which is feasible and has desired nonlinear dynamic properties
(a) find locally closest points and corresponding normal vector of known critical manifolds(b) remove normal vector constraints for which distance exceeds specified value
run optimization with active normal vector constraintssearch for new critical points along the linear connection between starting and end point of optimization
return to step (ii) if new critical point is found
check for critical points with interval arithmetics in the robustness region
optimal and steady state is found – parametrically robust with respect to feasiblity and nonlinear dynamics constraints
add new critical point
to set of critical points
(iii) optimization
(iv) analysis
(v) rigorous search
robust optimum found
new critical point?yes
yes
no
new critical point?
no
18Constructive Nonlinear Dynamics in Process Systems Engineering
Software Implementation – the Status
Augmented process model involves higher order derivatives of process model equations (normal vector constraints)
• process model is coded in MAPLE (Monagan et al. 2000)
• normal vector constraints are calculated by symbolic differentiation with MAPLE (Monagon et al. 2000) to augment process model
• first order derivates for numerical solution of NLP calculated by automatic differentiation with ADIFOR (Bischof et al. 1998)
• optimization by standard NLP solverso should use feasible path solver (e.g. FSQP, Lawrence &
Tits (2001)) to properly apply test functionso using NPSOL (Gill et al., 1986) and apply test functions along
the linear connection between starting and end point
• rigorous search with interval mathematics (Belitz et al., 2004) limited to small models, alternatively carefully selected test points
19Constructive Nonlinear Dynamics in Process Systems Engineering
Applications: Three Problem Classes
• design under uncertaintyContinuous fermenter
(Mönnigmann & Marquardt, 2002)Continuous vinylacetate polymerization
(Mönnigmann & Marquardt, 2003)
• controller tuning and robustness analysisCSTR with unmodelled dynamics
(Hahn et al. 2003, Gerhard et al., 2004)
• integration of design and controlMSMPR crystallizer
(Grosch et al., 2003)Reaction section of HDA plant
(Mönnigmann & Marquardt, 2004)
Halemane & Grossmann (1982)Swaney & Grossmann (1986) Kokossis & Floudas (1994)Bahri et al. (1996) ...
Ackermann (1980)Cibrario & Levine (1991)Giona & Paladino (1994) ...
Brengel &Seider (1992)Lewin & Bogle (1996)Mohideen et al. (1996, 1997)Bahri et al. (1997) ...
20Constructive Nonlinear Dynamics in Process Systems Engineering
Applications: Three Problem Classes
design under uncertainty- open-loop process system- operating point & equipment parameters- stability & feasibility- process & model uncertainty
controller tuning and robustness analysis- closed-loop process system- control system design parameters - stability (and performance) in a large
region of operating conditions- process & model uncertainty
integration of design and control- closed-loop process system - operating point, equipment parameters
& control system parameters- stability & feasibility- process & model uncertainty
21Constructive Nonlinear Dynamics in Process Systems Engineering
Design Under Uncertainty: Fermenter (1)
φ = cost of the substrate− profit from produced cells
uncertain parameters• Damköhler Number Da = µ(SF) V/F • substrate feed concentration SF
degrees of freedom• SF, Da
robustness w.r.t. stability boundaries
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
ÉÉÉÉÉÉÉÉÉ
0.2
0.3
0.4
0.5
0.6
0.7
2 3 4 5 6 7
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
ÉÉÉ
Hopf saddle–nodeSF [kmol m–3]
F [kg s–1]
0.8
two stability boundaries:Hopf and saddle-node bifurcations
Fermenter(Agrawal et al., 1982)
state variablesS, substrate concentrationX, biomass concentration
F, SF
S, X
V
22Constructive Nonlinear Dynamics in Process Systems Engineering
Design under Uncertainty: Fermenter (2)
0
0.05
0.1
0.15
0.2
0.25
0.5 0.6 0.7 0.8 0.9 1
stableunstable
Hopfsaddle-node
Da
x1
0.2
0.25
0.3
0.35
0.4
0.45
0.5 0.6 0.7
saddle-nodeHopf
Da
SF
0
0.2
0.4
0.6
0.8
1
0.5 0.6 0.7 0.9 10.8 Da
φ
Optimization• without normal
constraints• with normal
vector constraints for robust stability
0.2
0.25
0.3
0.35
0.4
0.45
0.5 0.6 0.7 0.8Da
SF
23Constructive Nonlinear Dynamics in Process Systems Engineering
Design Under Uncertainty: VA Polymerization (1)
0
0.02
0.04
0.06
0.08
0.1
0 50 100 150 200residence time [min]
20406080
100120140160180
temperature
0 50 100 150 200residence time[min]
stableinstableoptimal
saddle-node
Hopf
500
conc
entra
tion
of in
itiat
or[m
ol/l]
VA Polymerisation(Teymour & Ray, 1992)
state variablesM, monomer conc.I, initiator conc.P, polymer conc.T, reactor temperature
F, IF, MF
M, I, P, T
V
• small model• experimentally validated• critical (stability) manifoldsare known
24Constructive Nonlinear Dynamics in Process Systems Engineering
Design Under Uncertainty: VA Polymerization (1)
VA Polymerisation(Teymour & Ray, 1992)
state variablesM, monomer conc.I, initiator conc.P, polymer conc.T, reactor temperature
F, IF, MF
M, I, P, T
V
• small model• experimentally validated• critical (stability) manifoldsare known
φ = profit from polymer− cost of initiator− cost of monomer− cost of solvent
uncertain parameters• residence time θ = V/F • initiator feed concentration IF
degrees of freedom• F, IF, MF, θ
robustness w.r.t• stability boundaries (Hopf and
saddle-node)• feasibility constraints
(avoid boiling, T≤100°C)
25Constructive Nonlinear Dynamics in Process Systems Engineering
Robust Design: Stability and Feasibility (2)
residence time [min]
0
0.02
0.04
0.06
0.08
0.1
0 50 100 150 200
20406080
100120140160180
temperature
0 50 100 150 200residence time [min]
stableinstableoptimal
saddlenode
Hopf
conc
. of i
nitia
tor [
mol
/l]
saddle-node bifurcation only
20406080
100120140160180
temperature
0 50 100 150 200residence time[min]
stableinstableoptimal
saddlenode
Hopf
temp.constr.
residence time [min]0 50 100 150 200
0
0.02
0.04
0.06
0.08
0.1
conc
.on
of In
itiat
or [m
ol/l]
saddle-node and Hopf bifurcationsand temperature bound
26Constructive Nonlinear Dynamics in Process Systems Engineering
Applications: Three Problem Classes
design under uncertainty- open-loop process system- operating point & equipment parameters- stability & feasibility- process & model uncertainty
controller tuning and robustness analysis- closed-loop process system- control system design parameters - stability (and performance) in a large
region of operating conditions- process & model uncertainty
integration of design and control- closed-loop process system - operating point, equipment parameters
& control system parameters- stability & feasibility- process & model uncertainty
27Constructive Nonlinear Dynamics in Process Systems Engineering
Tuning and Robustness Analysis: CSTR (1)
CSTR, exothermic 1st order reaction A -> B, with unmodeledcooling jacket dynamics(Hahn et al. 2003)
• linearizing feedback (and PID) temperature control, parameter ε
• unmodeled dynamics in inner cascade control loop (TC2) parameterized by 2nd order dynamics
TC1
Coolant
TC2
Tc
q, CAF, Tf
CA, T
state variablesCA, conc. of AT, reactor temp.
max φ = yield of product B
find control parameters to guarantee stability for all set-points Tsp
non-transversal Hopf (NTH) manifoldsplits parameter space into • region with stable behavior for all
values of Tsp• region with unstable behavior for
some values of Tsp
uncertain parameters• feed rate q• time constant εv of unmodeled
dynamics
degrees of freedom: Tsp, q, ε
28Constructive Nonlinear Dynamics in Process Systems Engineering
Tuning and Robustness Analysis: CSTR (2)
unstable for some values of Tspwithout normal vector constraints
0 510
15
q /∆
q
εv/ ∆εv 300 350 4000
0.5
C A
Tsp
stableunstableHopf
setp
oint
tem
pera
ture
Tsp
Control parameter ε
stable forall Tsp
unstable
nontransversalHopf
stable for all values of Tspwith normal vector constraints
0 510
15
q /∆
q
εv/ ∆εv 300 350 4000
0.5
CA
Tsp
29Constructive Nonlinear Dynamics in Process Systems Engineering
Applications: Three Problem Classes
design under uncertainty- open-loop process system- operating point & equipment parameters- stability & feasibility- process & model uncertainty
integration of design and control- closed-loop process system - operating point, equipment parameters
& control system parameters- stability & feasibility- process & model uncertainty
controller tuning and robustness analysis- closed-loop process system- control system design parameters - stability (and performance) in a large
region of operating conditions- process & model uncertainty
30Constructive Nonlinear Dynamics in Process Systems Engineering
Integrated Design & Control: MSMPR Crystallizer (1)
F=τ • V
c0 ε = suspension density
ideal controlT, V
Kp, Ti
F=τ • V
c0 ε = suspension density
ideal controlT, V
F=τ • V
c0 ε = suspension density
ideal controlT, V
Kp, Ti
discretized population balance, solute balance, controller
PI control of suspension density εvia feed concentration c0
state variables mi,momentsc, concentrationεi, suspension
density 990 992 994 996 998 10000
0.5
1
1.5
2
2.5
3x 10-3
c0 [kg/m3]
m3 stableunstable
τ=1h τ=2h
τ=3h
990 992 994 996 998 10000
1
2
3
4
c0 [kg/m3]
τ [h]
σ = 0 1/h
σ = -0.1 1/h
σ = -0.5 1/h
unstable
stable
stability boundaryperformance constr.
open-loop behaviorMSMPR crystallizer(Jerauld, Doherty, 1982)
31Constructive Nonlinear Dynamics in Process Systems Engineering
Integrated Design & Control: MSMPR Crystallizer (1)
max φ = mass production rate
find design and controller tuning that guarantee dynamic performance
uncertain parameters• residence time τ• feed concentration c0 (open loop)
degrees of freedom• τ, Kp, Ti
use normal vector constraints on eigenvalue bounds to enforce performance
MSMPR crystallizer(Jerauld, Doherty, 1982)
F=τ • V
c0 ε = suspension density
ideal controlT, V
Kp, Ti
F=τ • V
c0 ε = suspension density
ideal controlT, V
F=τ • V
c0 ε = suspension density
ideal controlT, V
Kp, Ti
discretized population balance, solute balance, controller
PI control of suspension density εvia feed concentration c0
state variables mi,momentsc, concentrationεi, suspension
density
32Constructive Nonlinear Dynamics in Process Systems Engineering
Integrated Design & Control: MSMPR Crystallizer (2)
Optimization of the closed-loop process with guaranteed performance
990 995 1000 1005 1010 10150.20.5
1
1.5
2
2.5
c0 [kg/m3]
τ[h
]
0 300.0364
0.0366
0.0368
0.037
0.0372
t [h]
m3
[-]σ = -0.1 1/hnon-performant
performant
performance constraintconstraintsrobustness ellipse
σο = −0.2 h
σο = 0 h
productivity – open-loop stable φ = 12.0 kg/m3/h− closed-loop φ = 46.0 kg/m3/h
33Constructive Nonlinear Dynamics in Process Systems Engineering
Integrated Design & Control – HDA Process (1)
HDA process (Douglas, 1988)
Reaction section & simplified separation section
• 8 units• 5 PI controllers• large-scale model
- 100 differential eqs.- 370 algebraic eqs.
• 12 uncertain parameters• no knowledge on nonlinear
dynamics
compressorpurge
purge
mixer
heat exchanger
furnace
toloueneH2
TC
TC
TC
LC
PC
fuel
flash splitter methane
benzene
dyphenyltolouene
reactor
34Constructive Nonlinear Dynamics in Process Systems Engineering
Integrated Design & Control – HDA Process (2)
2.0
2.1
2.2
2.3
benzene prod. rate [kmol/min]
3.6
3.7
3.8
3.9
–1.20
–1.15
–1.10
–1.05
–4.00
–3.90
–3.80
–3.70
3.6
3.7
3.8
3.9
4.0
4.1
4.2
30 60 90 120 150 180
3.3
3.4
3.5
3.6
3.7
�������������
[kJ/min]
������������ [kJ/min] ���
��������
[kJ/min]
0
��������� [kJ/min] ���������� [kJ/min]
30 60 90 120 150 1800time [min] time [min]
30 60 90 120 150 1800
30 60 90 120 150 1800
30 60 90 120 150 1800
30 60 90 120 150 1800
Optimization
min φ = Total annual costs =∑annual capital costs+ operating costs
+ costs of chemicals
uncertain process design & control parameters
parametric robustness w.r.t. performance, bounds on eigenvalues, σ0 ≤ 30 min
step response at optimal steady state, 10% increase of toluene feed rate
35Constructive Nonlinear Dynamics in Process Systems Engineering
Summary and Future Perspectives
Constructive Nonlinear Dynamics: from science to engineering
• a unifying framework for the treatment of parametric uncertainty in process and control system design
• computationally feasible even for large-scale processes
• necessary extensions– time domain performance constraints– fast inputs– structural decisions and non-smooth models– processes with optimizing controllers– improvement of numerical methods
• software further development– large-scale problems– part of process modeling environments
applicationsin
design & controlof
process systems,vehicles, ...
Constructive Nonlinear Dynamicsin Process Systems EngineeringExample: Ammonia ReactorExample: Decanting ReactorExample: Heteroazeotropic RectificationExample: Reactor-Separator Recycle ProcessBifurcation AnalysisFrom Analysis to SynthesisConceptual Problem Formulation (1)Conceptual Problem Formulation (2)Optimization Problem FormulationsLeveraging the Profit LossParameterization of UncertaintyParametric Distance to a Critical ManifoldNormal Vector Equation SystemsOptimization under Uncertainty – the General CaseComplicated Real SituationsOverview on AlgorithmSoftware Implementation – the StatusApplications: Three Problem ClassesApplications: Three Problem ClassesDesign Under Uncertainty: Fermenter (1)Design under Uncertainty: Fermenter (2)Design Under Uncertainty: VA Polymerization (1)Design Under Uncertainty: VA Polymerization (1)Robust Design: Stability and Feasibility (2)Applications: Three Problem ClassesTuning and Robustness Analysis: CSTR (1)Tuning and Robustness Analysis: CSTR (2)Applications: Three Problem ClassesIntegrated Design & Control: MSMPR Crystallizer (1)Integrated Design & Control: MSMPR Crystallizer (1)Integrated Design & Control: MSMPR Crystallizer (2)Integrated Design & Control – HDA Process (1)Integrated Design & Control – HDA Process (2)Summary and Future Perspectives