Confidence Intervals for the Scale Parameter of the Power-Law Process
21
- 1 - Confidence Intervals for the Scale Parameter of the Power-Law Process Olivier Gaudoin 1,* , Bo Yang 2 and Min Xie 3 1 Laboratoire de Modélisation et Calcul, Institut National Polytechnique de Grenoble, France 2 Department of Information Engineering, University of Electronic Science & Technology of China, Chengdu, China 3 Department of Industrial and Systems Engineering, National University of Singapore, Singapore ABSTRACT The Power-Law Process (PLP) is a two-parameter model widely used for modeling repairable system reliability. Results on exact point estimation for both parameters as well as exact interval estimation for the shape parameter are well-known. In this paper, we investigate the interval estimation for the scale parameter. Asymptotic confidence intervals are derived using Fisher information matrix and theoretical results by Cocozza- Thivent (1997). The accuracy of the interval estimation for finite samples is studied by simulation methods. Key Words: Power-law process, repairable system reliability, nonhomogeneous Poisson process, maximum likelihood estimation, asymptotic confidence interval, information matrix, *Correspondence: Olivier Gaudoin, Laboratoire LMC, Institut National Polytechnique de Grenoble, BP 53, 38041 Grenoble Cedex 9, France; E-mail : [email protected]
Transcript of Confidence Intervals for the Scale Parameter of the Power-Law Process

- 1 -
Confidence Intervals for the Scale Parameter
of the Power-Law Process
Olivier Gaudoin1,*, Bo Yang2 and Min Xie3
1Laboratoire de Modélisation et Calcul, Institut National
Polytechnique de Grenoble, France 2Department of Information Engineering, University of Electronic
Science & Technology of China, Chengdu, China 3Department of Industrial and Systems Engineering,
National University of Singapore, Singapore
ABSTRACT
The Power-Law Process (PLP) is a two-parameter model widely used for modeling
repairable system reliability. Results on exact point estimation for both parameters as
well as exact interval estimation for the shape parameter are well-known. In this paper,
we investigate the interval estimation for the scale parameter. Asymptotic confidence
intervals are derived using Fisher information matrix and theoretical results by Cocozza-
Thivent (1997). The accuracy of the interval estimation for finite samples is studied by
simulation methods.
Key Words: Power-law process, repairable system reliability, nonhomogeneous Poisson
process, maximum likelihood estimation, asymptotic confidence interval, information
matrix,
*Correspondence: Olivier Gaudoin, Laboratoire LMC, Institut National Polytechnique de
Grenoble, BP 53, 38041 Grenoble Cedex 9, France; E-mail : [email protected]

- 2 -
1. INTRODUCTION
The Power-Law Process (PLP) is a well-known model used to study the reliability of
repairable systems by analyzing the failure dates collected over time. Duane (1964) was
the first to report that the cumulative number of failures of such systems up to time t , tN ,
often have a “power-law” growth pattern. Then, Crow (1974) formulated the
corresponding model as a nonhomogeneous Poisson process (NHPP) having the mean
value function:
( ) .0,0,0, )( ≥>>== ttNEtm t βαα β (1) The failure intensity of the model is:
1 )()( −== βαβλ ttmdtdt (2)
where α is a scale parameter and β is a shape parameter. When 1<β , the failure
intensity is decreasing; when 1>β , the failure intensity is increasing and when 1=β ,
the PLP becomes an Homogeneous Poisson process (HPP) and the failure intensity is a
constant. Hence, the PLP is a flexible model which can be used to model both reliability
growth ( 1<β ) and reliability deterioration ( 1>β ) which are two different, but common
situations.
Another interesting property of the PLP which account for its popularity among
researchers and practitioners is that it has closed form expressions for the maximum
likelihood (ML) estimators of parameters α and β (Crow, 1974). If n failures have been
observed at times 1T , 2T , …, nT , then the likelihood function is:
( ) ( ) βαββαλ nTn
ii
nnnTmn
ii eTeTL −
=
−−
=
=
= ∏∏
1
1
1 (3)
The log-likelihood is:
βαββα nn
ii TTnnL −−++= ∑
=1ln)1(lnlnln (4)

- 3 -
By maximizing Lln as defined above, the ML estimators, nα and nβ , are found to be:
∑−
=
== 1
1
ˆ
ln
ˆ and ˆn
i i
nn
nn
TT
nTn βα
β (5)
Other than point estimation of model parameters, it is also important to have some idea
about the estimation errors. Interval estimation, therefore, should be considered.
The PLP has been studied by many researchers. Detailed reviews of these studies are in
Rigdon and Basu (1989, 2000). Recent studies on the PLP focus on goodness-of-fit tests
(Park and Seoh 1994, Baker 1996, Crétois et al. 1999, Gaudoin et al. 2003), Bayesian
inference (Sen 2002), graphical properties (Rigdon 2002) and generalized PLP (Pulcini
2001, Muralidharan 2002, Ryan 2003).
Crow (1974) provided exact confidence interval for the shape parameter β . Using basic
results on nonhomogeneous Poisson processes, it is easy to prove the following.
Property 1: The vector
−− 121ln,...,ln,ln
TT
TT
TT n
n
n
n
n βββ is distributed as the order
statistics of a sample of size 1−n from the exponential distribution with parameter 1.
The following result is an immediate corollary.
Property 2: ∑−
=
=1
1ln2ˆ2
n
i i
n
n TT
n βββ has the chi-square distribution with )1(2 −n degrees of
freedom 2)1(2 −nχ .
From this result, an exact 100(1-γ)% confidence interval (CI) for β can be derived:
−−−
22),1(2
221),1(2 2
ˆ,
2
ˆγγ χβχβ
nn
nn
nn (6)

- 4 -
where 2
,γχv is the 1-γ percentile of the chi-square distribution with v degrees of freedom.
It is also easy to prove the following asymptotic results on nβ :
ββ → as
nˆ (7)
)1,0(ˆ
Nn dn →−β
ββ (8)
Crow (1974) also proposed CI for the scale parameter α when β is known, but CI for α
when β is unknown have not been proposed yet. The purpose of this paper is to study
confidence intervals for the scale parameter of the Power-Law Process, when the shape
parameter is unknown.
This paper is organized as follows. Section 2 presents some results for another
formulation of the Power-Law Process. In Section 3, several asymptotic CI for α are
derived. The accuracy of these asymptotic CI for small samples is assessed in Section 4
by simulation methods. Finally, some concluding remarks are given in Section 5.
2. ANOTHER FORMULATION OF THE POWER-LAW PROCESS
The original formulation (1) of the model has been proposed by Crow in order to capture
the power-law growth pattern of data observed by Duane. However, for statistical
purposes, it appears to be very convenient to write the model as:
β
η
= ttm )( (9)
Let nnn
βαηˆ/1ˆˆ −= be the ML estimator of η. Finklestein (1976) showed that

- 5 -
( ) ββββα
ηη nn Tn n 2ˆ2ˆ/ = has the 2
2nχ distribution and can be used as a pivotal quantity for
η. The distribution of ( ) nnW βηη
ˆ/ˆ= does not depend on η and β, so a 100(1-γ)%
confidence interval for η is:
−nn
n
n
n
n
WW βγ
βγ
ηηˆ12,
ˆ1)21(,
ˆ,
ˆ (10)
where )21(, γ−nW and 2,γnW are percentiles of the distribution of W. They can be
obtained from Finklestein’s table which was generated by extensive simulation.
The asymptotic properties of nη have been studied by Cocozza-Thivent (1997), who
proved that (proposition 3.22 and 3.23 p. 78-79):
ηη → as
nˆ (11)
)1,0(ˆ
lnˆ N
nn dn
n →−
ηηηβ (12)
From (12) an asymptotic 100(1-γ)% confidence interval for η can be derived:
−+n
nzn
nzn
n
n
n
β
η
β
η
γγ ˆln1
ˆ,
ˆln1
ˆ
2/2/
(13)
where 2/γz is the 2/1 γ− percentile of the standard normal distribution.
The lower bound in (13) can be negative, so it is not appropriate since η is a positive
parameter. A usual way to get rid of this problem is to use the delta method with the
logarithmic function (see Nelson 1982, p. 331). It leads to the following result, also
proved by Cocozza-Thivent (1997):

- 6 -
)1,0(ˆ
lnln
ˆ Nnn dn
n →ηηβ (14)
From (14), we obtain another asymptotic 100(1-γ)% confidence interval for η with
always positive bounds:
+
−
nnz
nnz
nn
nn β
ηβ
η γγ ˆlnexpˆ,ˆ
lnexpˆ 2/2/ (15)
Then, all the desirable results on confidence intervals for parameter estimators of the PLP
have been proved under Finklestein’s formulation. However, Crow’s formulation is more
used in practice because of its physical meaning. It is for example the case in the recent
IEC International Standard (2000). In this case, exact interval estimation for α cannot be
built because it is not possible to find a pivotal quantity for α. In the following section,
asymptotic CI for α will be studied.
3. ASYMPTOTIC CONFIDENCE INTERVALS FOR αααα
3.1. Asymptotic CI derived from Finklestein’s formulation
The relationship between Crow’s and Finklestein’s formulations of the PLP is given by
βαη /1−= or αβ
η ln1ln −= . The same relationships hold for the maximum likelihood
estimators of these parameters. The asymptotic properties of nα can be derived from
those of nη .
First of all, Equations (7) and (11) lead to :
αα → as
nˆ (16) Regarding asymptotic normality, (12) leads to asymptotic CI with possibly negative

- 7 -
bounds. So we concentrate on a result derived from (14). In Crow’s formulation, (14) can
be written as:
)1,0(lnˆ
1lnˆ
lnln
ln1ˆlnˆ1
lnˆ N
nn
nn
nn dn
nn
nn →
−−=
+− α
ββ
ααα
βα
ββ (17)
Using (7), we obtain:
)1,0(ˆ
lnln
Nnn dn →
αα
(18)
from which a 100(1-γ)% confidence interval for α with positive bounds can be derived:
+
−nnz
nnz nn
lnexpˆ,lnexpˆ 2/2/ γγ αα (19)
This interval is obviously similar to (15). A problem raised by (19) is that this interval
may be very wide for some values of the parameters. For example, a simulation with
60=n , 90=α and 1=β led to 9.98ˆ =nα and CI (19) for γ = 0.10 was obtained as
[41.5, 235.9]. Such CI is much too wide to be useful.
Hence, it is important to find narrower confidence intervals for α. Next section presents a
way to find such CI using the Fisher information matrix of the model.
3.2. Asymptotic CI derived from Fisher information matrix
A common approach for obtaining asymptotic confidence regions for model parameter is
to use the asymptotic theory of maximum likelihood estimation. In a general framework,
let θ be the model parameter and nθ be its maximum likelihood estimator.
When observed data are independent and identically distributed, it is well known that the
asymptotic distribution of nθ is given by:

- 8 -
[ ] ),0(ˆ2/1 IdNI d
nn →−θθ (20)
where nI is the Fisher information matrix of the model and Id is the identity matrix.
Since nI contains unknown parameters, it is more useful to consider the estimated
information matrix nI and the asymptotic result:
[ ] ),0(ˆˆ 2/1 IdNI d
nn →−θθ (21)
When observed data come from a random process, similar results have been established
by several authors, for example Basawa and Prakasa Rao (1980) and Van Pul (1992). In
the case of nonhomogeneous Poisson processes, Cocozza-Thivent (1997) and Kutoyants
(1998) gave rather complex conditions upon which the asymptotic normality of nθ is
showed. Unfortunately, it happens that these conditions are not completed by the Power-
Law Process. So we can not directly state that, for PLP,
−−
ββαα
n
nnI ˆ
ˆ2/1 is asymptotically
standard normal distributed. However, we will use the information matrix in order to
propose approximate CI for the parameters and the validity of these approximations will
be proved by another way.
The Fisher information matrix of the model is:
−
−
−
−
=
2
22
2
2
2
lnln
lnln
β∂∂
βα∂∂∂
βα∂∂∂
α∂∂
LELE
LELEIn (22)
The log-likelihood is given in Equation (4), so the information matrix is:
[ ][ ] [ ]
+=
ββ
β
αβ
α
nnnn
nn
nTTEnTTE
TTEn
I2
2
2
)(ln)(ln
)(ln (23)

- 9 -
Using the fact that βnT has the gamma ),( αnG distribution (Crow, 1974), the
expectations in (23) can be derived as:
[ ] [ ]αψαβ
β ln)1()(ln −+= nnTTE nn (24)
and
[ ] [ ][ ]2)1(2
2 ln)1()1()(ln αψψαβ
β −+++= nnnTTE nn (25)
In Equations (24) and (25), )(ln)( zdzdz Γ=ψ is the digamma function and
)()()1( zdzdz ψψ = is the polygamma function of order 1, where ∫
+∞ −−=Γ 01)( dxxez zx is
the gamma function. These functions have very useful properties (Abramovitz and
Stegun, 1984):
Property 3. Since 1+n is an integer, γψ −=+ ∑=
n
i in
1
1)1( and ∑=
−=+n
i in
12
2)1( 1
6)1( πψ ,
where 5772156.0=γ is the Euler constant.
Property 4. When n converges to infinity, )(nψ is equivalent to nln and )()1( nψ is
equivalent to n1 .
Then, the information matrix (23) has a tractable expression and it can be easily inverted
as:
[ ]
[ ]
++++−+−
++−+−
++−++
=−
)1(1)1(1ln)1(
)1(1ln)1(
)1(1ln)1(1
)1(
2
)1(
)1()1(
22
1
nnnn
n
nn
nnn
nIn
ψβ
ψαψαβ
ψαψαβ
ψαψα
(26)
With property 4 above, it is easy to show that when n converges to infinity, this matrix is

- 10 -
equivalent to:
−
−
+
=−
nn
n
nn
nnI en 2
22
11,
ln
lnln1
βα
αβα
αβα
α
(27)
which itself is equivalent to:
−
−=−
nnn
nn
nn
I en 2
22
12, ln
ln)(ln
βαβ
αβα
(28)
The diagonal components or matrices 1
1,−
enI and 12,
−enI give approximate asymptotic
variances of nα and nβ which are much easier to use than those provided by 1−nI .
If a property similar as (20) were true for the PLP, we would derive the asymptotic
distribution of the maximum likelihood estimators of the PLP parameters:
)1,0(ˆ
lnN
nn dn →
−α
αα (29)
)1,0(ˆ
Nn dn →−β
ββ (30)
In fact, these convergences can be proved without the equivalent of (20) for the PLP: (30)
is exactly the same result as (8) and the proof of (29) is similar to that of (18) using (12)
instead of (14).
Equation (29) leads to a second asymptotic 100(1-γ)% confidence interval for α :
−+ 2/2/ln1
ˆ,
ln1
ˆ
γγ
αα
znnz
nn
nn (31)

- 11 -
Interval (31) is clearly similar to (13). Since )(1 xoxe x ++= , it appears that intervals (19)
and (31) are asymptotically equivalent. However, CI (31) is of poor practical use, for the
following reasons.
First, note that the upper bound of (31) is positive only if 2/ln γznn > . Since the sequence
( ) 1ln ≥nnn converges extremely slowly to the infinity, this condition is not always
satisfied. This is the case, for example, when n = 50 and γ = 0.05, since 50ln50 =
1.808 and 960.1025.0 =z .
The minimum value of the sequence is obtained for n = 7 and is 360.17ln7 = . For γ =
0.20, 282.11.0 =z , so the condition is always satisfied. In fact, if γ is greater than 0.1739,
the condition is always true and interval (31) can be used for any sample size. If γ is less
than 0.1739, (31) can be used only for sample sizes such that the condition is satisfied.
For example, if γ = 0.05, n has to be greater than 69, and if γ = 0.10, n has to be greater
than 34.
Another problem raised by (31) is that the interval may be excessively wide. For the same
example as in section 3.1., the CI is [52.9, 757.9], which is much wider than [41.5, 235.9]
found for (19).
The explanation of this result lies in the link between (27) and (28). In fact, matrix 11,
−enI is
asymptotically equivalent to matrix 12,
−enI because
+
2ln11
αn
n is asymptotically
equivalent to ( )nn 2ln . But because the growth of the logarithm is extremely slow, for
finite n, these values can be very different.

- 12 -
For example, with 60=n , ( ) 2794.06060ln 2
= . For 90=α , 0194.09060ln1
601 2
=
+
and for 01.0=α , 2780.101.0
60ln1601 2
=
+ . These two values are very far from
0.2794. In fact, the equivalence between 11,
−enI and 1
2,−
enI is valid for finite samples only if
α is close enough to 1.
By now the conclusion that can be drawn is that CI (31) will be of poor practical use for
finite sample size n.
A solution is to use matrix 11,
−enI rather than matrix 1
2,−
enI to approximate 1−nI . It is
equivalent to use 2
ln1
+
αn
n instead of nn
ln in the previous results. In order to avoid
the problem of negative lower bound, we will give only the result for the delta method
with log-transform. Using (18) and the asymptotic equivalence between the above
quantities, we obtain:
)1,0(ˆ
lnln1
2 Nn
n dn →
+
αα
α
(32)
Since nα converges almost surely to α, we also have:
)1,0(ˆ
ln
ˆln1
2 Nn
n dn
n
→
+
αα
α
(33)
from which a third asymptotic (1-γ)% confidence interval for α is derived:

- 13 -
++
+−
22/
22/
ˆln1expˆ,
ˆln1expˆ
nn
nn
nn
znn
zα
αα
α γγ (34)
For the example presented in Section 3.1, the interval is [78.0,125.4], which is much
better than [41.5,235.9] for (19) and [52.9,757.9] for (31).
It can be noticed that the estimated information matrix for PLP is:
n
n
LL
LL
I n
ββααβ∂
∂βα∂∂
∂βα∂∂
∂α∂
∂
ˆˆ2
22
2
2
2
lnln
lnln
ˆ
==
−−
−−= (35)
Then it can be shown that
+=
nn
n
nnnn
nn
nnn
nTTnTT
TTn
Iββ
β
αβ
αˆ2
2
ˆ
ˆ
2
)(lnˆˆ)(ln
)(lnˆˆ (36)
Using (5), n
nnT n
αβ
ˆˆ = and
nnn
nTα
βˆ
lnlnˆ = , so the determinant of nI is found to be
22
2
ˆˆ nn
nβα
. Then, straightforward calculation leads to the inverse of nI :
−
−
+
=
−
−+=−
nn
n
nn
nn
nnT
nT
nT
nIn
n
nn
n
nn
n
n
nnnn
nnnnnnn
n 2
22
22
22222
1
ˆ
ˆln
ˆˆ
ˆln
ˆˆˆ
ln1ˆ
ˆ)(lnˆˆ
)(lnˆˆ)(lnˆˆˆˆ
βα
βα
αβα
αα
ββα
βαβαα
(37)
Equation (37) is exactly the empirical equivalent of (27). And the expected
corresponding asymptotic CI for α with the log-transform is exactly (34).

- 14 -
4. SIMULATION STUDY
In this section, we investigate the influence of model parameters and sample size on the
asymptotic CI (19) and (34) for α. The accuracy of the interval estimation is assessed by
simulation method. m samples of size n of a PLP with specific values of α and β are
simulated. For each sample, the parameters are estimated and CI (19) and (34) are
derived. The empirical confidence level (ECL) of CI, or coverage probability, is the
fraction of the m replicates for which the true value of α falls into the interval. When n
converges to infinity, ECL converges to the nominal confidence level γ−1 . However,
when n is small, this value may not be close to γ−1 . The objective of this section is to
find out for which scope of n values ECL is close enough to γ−1 , so that the proposed
CI can be used for finite samples.
From Crow (1974), the distribution of nα does not depend on β. Since only nα is
involved in the CI, the value of model parameter β has no influence on the ECL.
Therefore, in the simulations, β is set to 1. The ECL depends only on n, α and γ.
We studied the cases of several usual values of γ . Since the same kind of results are
obtained for each value of γ, we only present here the plots for γ = 0.10. We take some
representative values of α as examples, which are scattered on both sides of the value 1:
α = 0.01, 0.1, 1, 10 and 50. The number of replications in simulations is m = 10000.
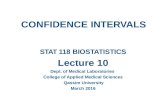
It can be seen on Figure 2 that the convergence of the ECL of (34) to the nominal value
γ−1 is rather fast. Roughly speaking, for 20≥n , the error on the confidence level is less
than 1%, for any value of α. The influence of α can be seen only for small samples: the
CI seems to be conservative for 1<α (ECL γ−>1 ). For 50=α , it is anticonservative
(ECL γ−<1 ) but for 10=α , the ECL oscillates between values larger and lower than γ−1 .

- 15 -
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100 120 140 160 180 200
n
ECLn α=0.01
α=0.1α=1
0
0.2
0.4
0.6
0.8
1
1.2
0 20 40 60 80 100 120 140 160 180 200
n
EC
Ln α=10
α=50
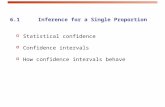
Figure 1 : Empirical confidence level of (19) for 10.0=γ
0.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92
0.93
0.94
0 20 40 60 80 100 120 140 160 180 200
n
EC
Ln α=0.01
α=0.1α=1
0.85
0.86
0.87
0.88
0.89
0.9
0.91
0.92
0.93
0.94
0 20 40 60 80 100 120 140 160 180 200
n
EC
Ln α=10
α=50
Figure 2 : Empirical confidence level of (34) for 10.0=γ

- 16 -
On the contrary, the convergence of the ECL of (19) to γ−1 is extremely slow. The
speed of convergence is satisfactory only for α = 1. For 1<α , the ECL is much lower
than γ−1 , and for 1>α , it is much larger, and close to 100%.
A possible explanation lies in the lengths of CI (19) and (34), which are:
=
−−
+=
nnzsh
nnz
nnzL nn
lnˆ2lnexplnexpˆ)19( 2/2/2/ γγγ αα (38)
+=
+−−
++=
22/
22/
22/
ˆln1ˆ2
ˆln1exp
ˆln1expˆ)34(
nn
nnn
nn
zshn
n
znn
zL
αα
ααα γγγ
(39)
where sh is the hyperbolic sine function. Since sh is an increasing function, these lengths are increasing functions of nα , as
expected. They are also increasing functions of nnln , so they are decreasing functions of
n, as expected, as soon as n > 7. Moreover, it can be proved that (19) is included in (34) or (34) is included in (19),
depending on the sign of 2
ˆln1ln
+−
n
nnα
. More precisely, (19) is included in (34) if
0)ˆ(lnˆlnln21 2 >+− nnn αα and (34) is included in (19) if 0)ˆ(lnˆlnln21 2 <+− nnn αα .
Then, it is easy to show that:
• For 1ˆ ≤nα , (19) is included in (34) for each 1≥n .
• For 1ˆ >nα , (34) is included in (19) for each
≥
nnn
αα
ˆln21expˆ .

- 17 -
Regarding empirical confidence levels, large CI will have greater ECL than narrow CI.
So it is not surprising that ECL(19) < ECL(34) for 1≤α and ECL(19) > ECL(34) for
1>α . However, ECL(19) was expected to be much closer to 1-γ that is shown in figure
1, at least for large values of n. Then, for 01.0=α and 10.0=γ , we have computed more
values of ECL(19) with very large sample sizes:
• n = 2000 , ECL(19) = 0.692300
• n = 5000 , ECL(19) = 0.715800
• n = 10000 , ECL(19) = 0.722600
We are still very far from γ−1 = 0.90. Then, the convergence of ECL(19) to γ−1 is
extremely slow.
Figure 3 plots the average lengths of CI (19) and (34) over the m replications, for
10.0=γ .
0
0.5
1
1.5
2
2.5
3
3.5
0 20 40 60 80 100 120 140 160 180 200
n
Ave
CI
a=0.01, using (19) a=0.01, using (34) a=0.1, using (19) a=0.1, using (34)a=1, using (19) a=1, using (34)
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100 120 140 160 180 200
n
Ave
CI
a=10, using (19) a=10, using (34) a=50, using (19) a=50, using (34)
Figure 3 : Average lengths of (19) and (34) for 10.0=γ

- 18 -
The theoretical results about CI lengths are confirmed: the length is a decreasing function
of n and an increasing function of α, (19) is included in (34) for 1<α and (34) is
included in (19) for 1>α . For 1=α , (19) and (34) are nearly identical. Moreover, it can
be seen that the lengths of these CI are reasonably small (except (19) for 50=α ), so they
can be useful in practice.
Finally, we have computed the CI for real data sets. Table 1 give CI (19) and (34) for data
sets in Kumar and Klefsjö (1992), regarding failures of load-haul dump (LHD) machines.
Goodness-of-Fit tests have been applied to these data and the assumption that they come
from a PLP has not been rejected. Then, it is appropriate to compute the CI for these data.
As expected, since the sample sizes are small, all CI are very wide. Moreover, nα is
always lower than 1, so (19) is always included in (34).
CI for αααα (10-5) Machine no. Sample
size n nα
(10-5) nβ Using (19) Using (34)
LHD1 23 6.768 1.628 [2.309, 19.84] [0.0846, 541.5] LHD3 25 12.69 1.492 [4.401, 36.59] [0.227, 709.9] LHD9 27 2.247 1.654 [0.791, 6.377] [0.0264, 191.1] LHD11 28 77.08 1.316 [27.35, 217.2] [2.903, 2046.5] LHD17 26 11.26 1.528 [3.935, 32.20] [0.2068, 613.0] LHD20 23 117.0 1.220 [39.92, 343.1] [3.874, 3535.8]
Table 1. Confidence intervals for α, LHD data, γ = 0.10
Table 2 gives CI (19) and (34) for software reliability data sets in Gaudoin (1990). Since
the sample sizes and the values of nα are much greater than those in table 1, the CI are
reasonably narrow. Moreover, nα is greater than 1 for C2, so (34) is included in (19) for
this data set.

- 19 -
CI for αααα Data Set Sample
size n nα nβ Using (19) Using (34)
C1 169 0.8103 0.5715 [0.4234, 1.5509] [0.4075, 1.611] C2 395 2.7090 0.46240 [1.6515, 4.4435] [1.778, 4.126] C3 40 0.0346 0.6689 [0.0132, 0.0902] [0.0054, 0.2205] C4 46 0.5671 0.3787 [0.2240, 1.4352] [0.1900, 1.6924]
Inc1 30 0.2486 0.4243 [0.0895, 0.6905] [0.0571, 1.0818] Inc2 25 0.0113 0.7116 [0.0039, 0.0325] [0.00087, 0.1452] Inc3 21 0.0170 0.6973 [0.0057, 0.0506] [0.0013, 0.2243]
Table 2. Confidence intervals for α, software reliability data, γ = 0.10
5. CONCLUSION
In this paper, we have proposed several ways to build asymptotic confidence intervals for
the scale parameter of the Power-Law Process. Among them, CI (34) seems to be the best
because its coverage rate is close to the nominal level, even for rather small samples.
Regarding the lengths of the CI, the narrowest interval will depend on whether nα is
lower or greater than 1. Further work could be to build CI based on likelihood ratio or
bootstrap procedures.
REFERENCES
Abramowitz, M., Stegun, I.A. (1984). Handbook of Mathematical Functions with
Formulas, Graphs, and Mathematical Tables. Wiley, New York.
Baker, R.D. (1996). Some new tests of the power law process. Technometrics, 38:256-
265.
Basawa, I.V., Prakasa Rao, B.L.S. (1980). Statistical Inference for Stochastic Processes.
Academic Press, London.
Cocozza-Thivent, C. (1997). Processus Stochastiques et Fiabilité des Systèmes. Springer-

- 20 -
Verlag, Berlin (in French).
Crétois, E., El Aroui, M.A., Gaudoin, O. (1999). U-plot method for testing the goodness-
of-fit of the power-law process. Commun. Statist. Theory Meth. 28:1731-1747.
Crow, L.H. (1974). Reliability analysis for complex, repairable systems. Reliability and
Biometry, Proschan F. and Serfling R.J. eds. Philadelphia, SIAM. 379-410.
Duane, J.T. (1964). Learning curve approach to reliability monitoring. IEEE Trans.
Aerospace, AS-2:563-566.
Finkelstein, J.M. (1976). Confidence bounds on the parameters of the Weibull process.
Technometrics. 18:115-117.
Gaudoin, O. (1990). Outils statistiques pour l’évaluation de la fiabilité des logiciels. PhD
thesis (in French). Université Joseph Fourier, Grenoble.
Gaudoin, O, Yang, B., Xie, M. (2003). A simple goodness-of-fit test for the Power-Law
Process, based on the Duane plot. IEEE Trans. Reliability, R-52(1):69-74.
IEC 61710 (2000). Power law model – Goodness-of-fit tests and estimation methods.
International Electrotechnical Commission Standard, CEI/IEC 61710:2000
Kumar, U., Klefsjö, B. (1992). Reliability analysis of hydraulic systems of LHD
machines by using the Power-Law process model. Rel. Eng. System Safety. 35:217-
222.
Kutoyants, Y. (1998). Statistical inference for spatial Poisson processes. Lecture Notes
in Statistics. Springer, New-York.
Muralidharan, K. (2002). Reliability inferences of modulated Power-Law process, IEEE
Trans. Reliability, R-51 (1):23-26.
Nelson, W. (1982). Applied Life Data Analysis. Wiley, New-York.
Park, W.J., Seoh, M. (1994). More goodness-of-fit tests for the power-law process. IEEE
Trans. Reliability, R-43:275-278.
Pulcini, G. (2001). A bounded intensity process for the reliability of repairable equipment.
J. Quality Tech. 33(4):480-492.
Rigdon, S.E. (2002). Properties of the Duane plot for repairable systems, Quality
Reliability Eng. Int. 18 (1):1-4.
Rigdon, S.E., Basu, A.P. (1989). The power law process: a model for the reliability of
repairable systems. J. Quality Tech. 21:251-260.

- 21 -
Rigdon, S.E., Basu, A.P. (2000). Statistical Methods for the Reliability of Repairable
Systems. Wiley, New York.
Ryan, K.J. (2003). Some flexible families of intensities for non-homogeneous Poisson
process models and their Bayes inference, Quality Reliability Eng. Int. 19(2):171-
181.
Sen, A. (2002). Bayesian estimation and prediction of the intensity of the Power-Law
Process. J. Statist. Comput. Simul. 72(8):613-631.
Van Pul, M.C. (1992). Asymptotic properties of a class of statistical models in software
reliability. Scand. J. Statist. 19:235-253.