
Computer vision
204
Transcript of Computer vision
Computer Vision ?
• Computer vision is a field that includes
methods for acquiring, processing,
analyzing, and understanding images.
• In general, high-dimensional data from the
real world in order to produce numerical or
symbolic information, in the forms of
decisions.
Dr. C. Saravanan, NIT Durgapur,
India
CV Continues …
• For duplicating the abilities of human
vision by electronically perceiving and
understanding an image with the aid of
geometry, physics, statistics, and learning
theory.
• Computer vision is concerned with the
theory behind artificial systems that extract
information from images. Dr. C. Saravanan, NIT Durgapur,
India
CV Continues …
• The image data can take many forms,
such as video sequences, views from
multiple cameras, or multi-dimensional
data from a medical scanner.
• Computer vision seeks to apply its
theories and models to the construction of
computer vision systems.
Dr. C. Saravanan, NIT Durgapur,
India
CV Applications (few)
– reconstruction,
– event detection,
– video tracking,
– object recognition,
– object pose estimation,
– learning,
– indexing,
– motion estimation,
– image restoration etc.Dr. C. Saravanan, NIT Durgapur,
India
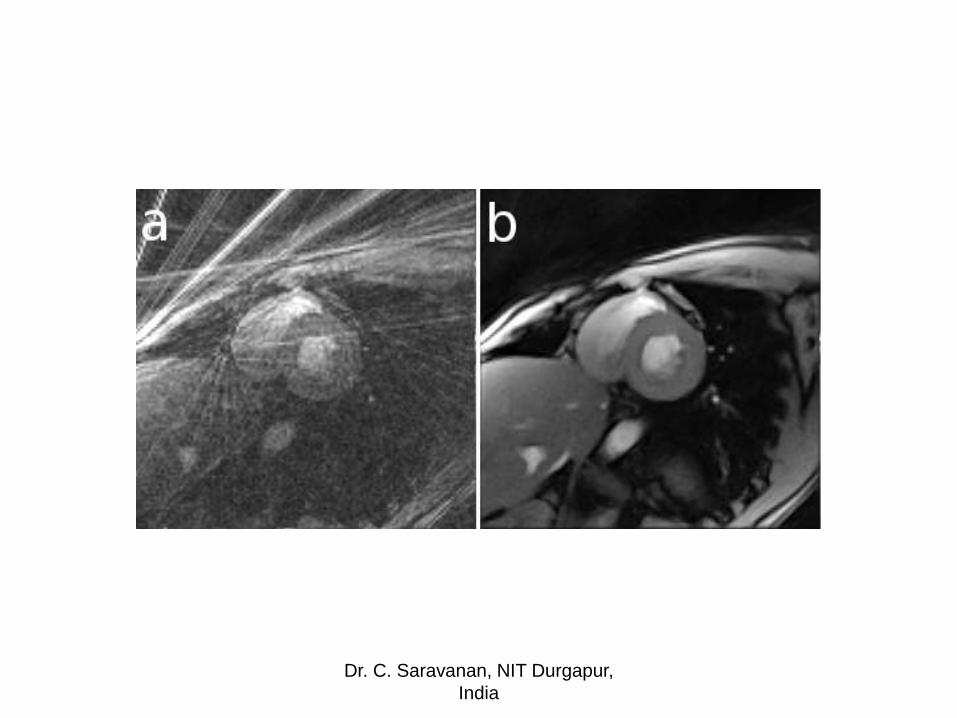
Reconstruction
• Image reconstruction techniques are used
to create 2-D and 3-D images from sets of
1-D projections. These reconstruction
techniques form the basis for common
imaging modalities such as CT, MRI, and
PET, and they are useful in medicine,
biology, earth science, archaeology,
materials science, and nondestructive
testing.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Event Detection
• An interesting event may be defined as
something that is “not normal”.
• For this purpose, we need to model the
normal situation and device means to
discover deviations from this model.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
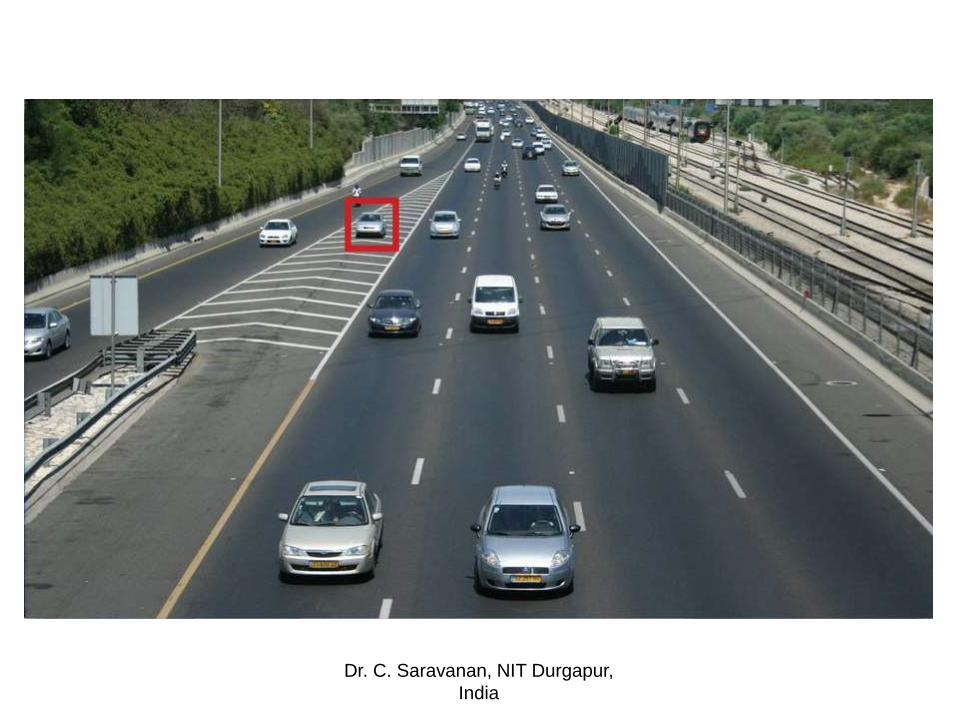
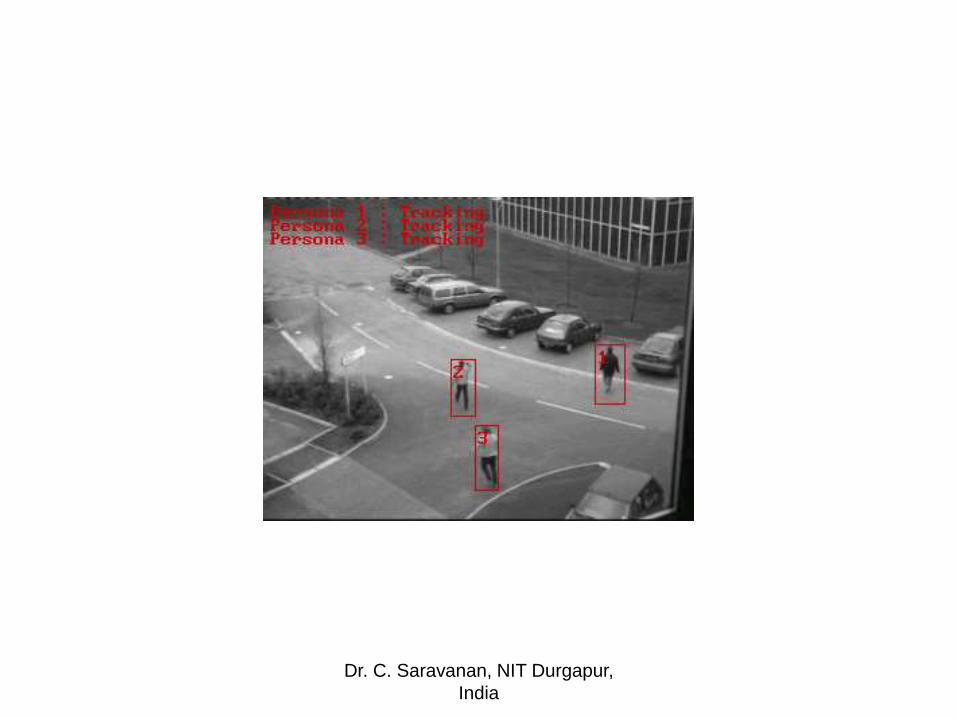
Video Tracking
• Video tracking is the process of locating
a moving object (or multiple objects) over
time using a camera. It has a variety of
uses, some of which are: human-computer
interaction, security and surveillance,
video communication and compression,
augmented reality, traffic control, medical
imaging and video editing.
Dr. C. Saravanan, NIT Durgapur,
India
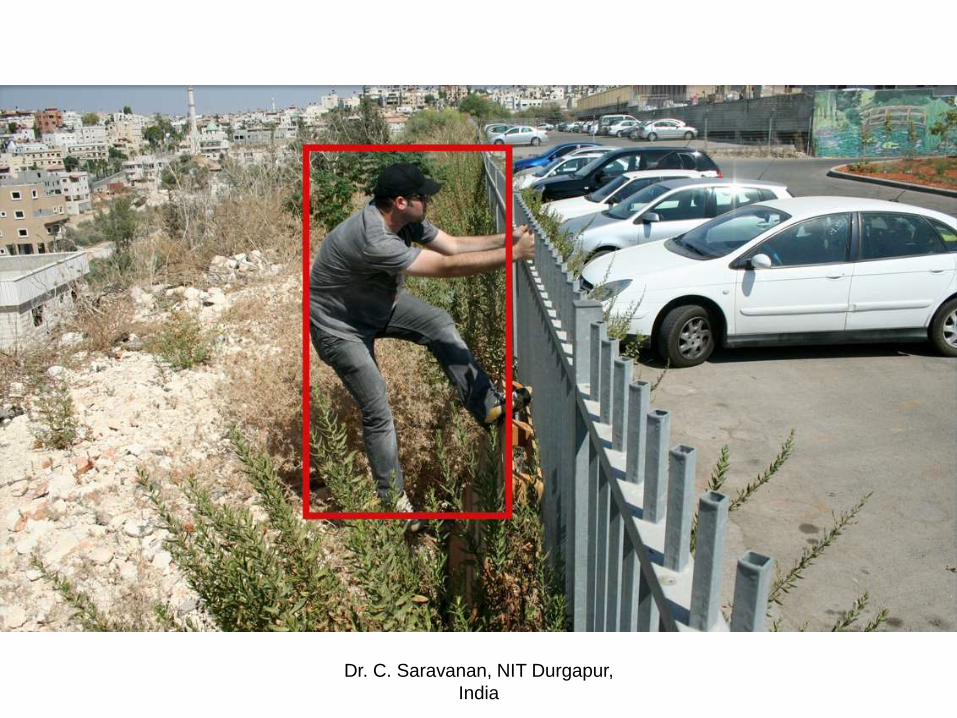
Video Tracking
• Video tracking can be a time consuming
process due to the amount of data that is
contained in video. Adding further to the
complexity is the possible need to
use object recognition techniques for
tracking, a challenging problem in its own
right.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Object Recognition
• A task of finding and identifying objects in
an image or video sequence.
• Humans recognize a multitude of objects
in images with little effort. Objects can
even be recognized when they are
partially obstructed from view, the objects
may vary somewhat in different view
points, in many different sizes and scales
or even when they are translated or
rotated. Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
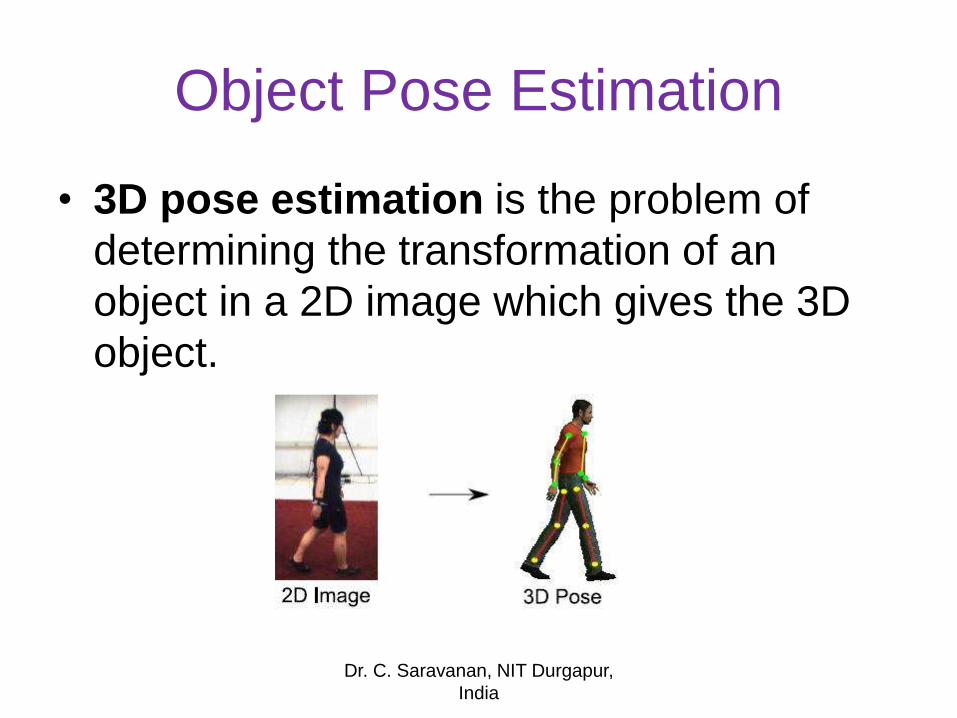
Object Pose Estimation
• 3D pose estimation is the problem of
determining the transformation of an
object in a 2D image which gives the 3D
object.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Digital Image Processing (DIP)
• DIP is the use of computer algorithms to
perform image processing on digital images.
--WIKI
Dr. C. Saravanan, NIT Durgapur,
India
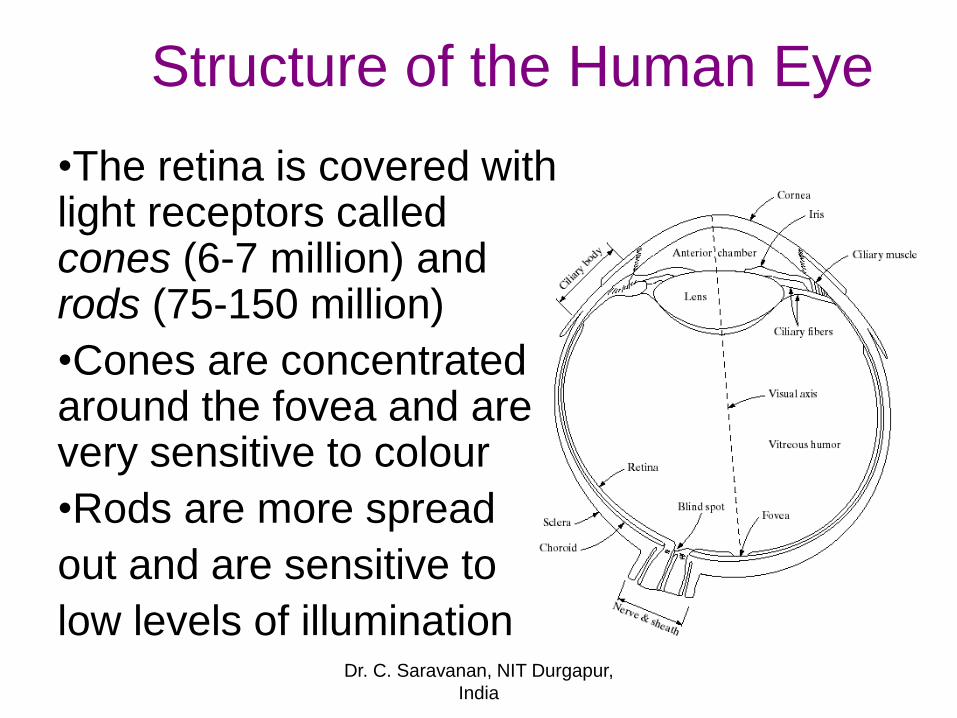
Structure of the Human Eye
•The retina is covered with light receptors called cones (6-7 million) androds (75-150 million)
•Cones are concentrated around the fovea and are very sensitive to colour
•Rods are more spread
out and are sensitive to
low levels of illuminationDr. C. Saravanan, NIT Durgapur,
India
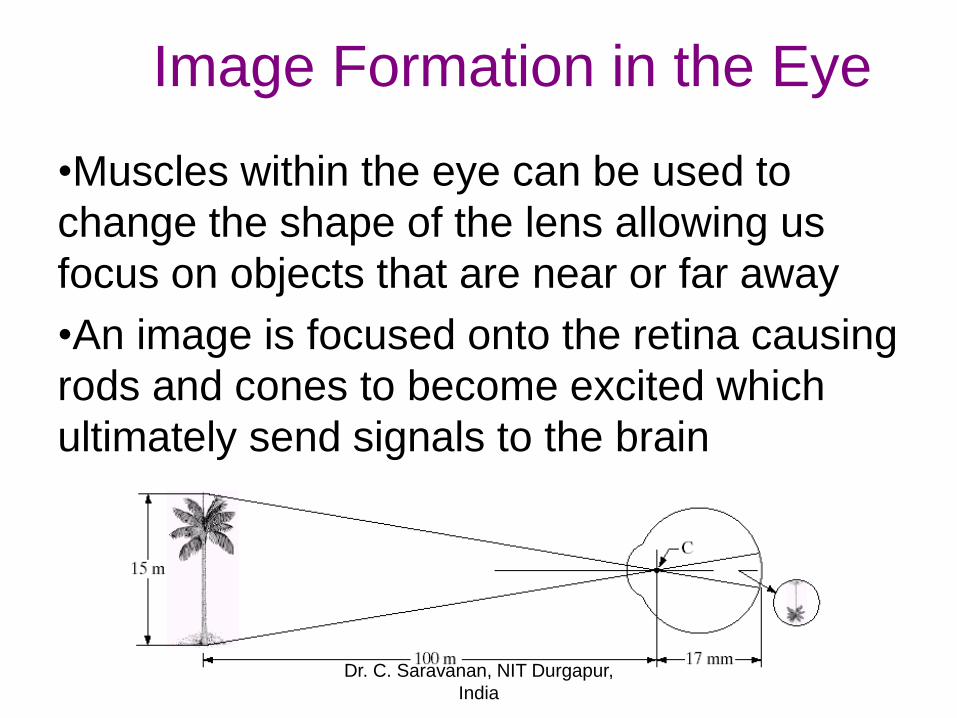
Image Formation in the Eye
•Muscles within the eye can be used to
change the shape of the lens allowing us
focus on objects that are near or far away
•An image is focused onto the retina causing
rods and cones to become excited which
ultimately send signals to the brain
Dr. C. Saravanan, NIT Durgapur,
India
Brightness Adaptation & Discrimination
•The human visual system can perceive
approximately 1010 different light intensity
levels
•However, at any one time we can only
discriminate between a much smaller
number – brightness adaptation
•Similarly, the perceived intensity of a region
is related to the light intensities of the
regions surrounding it
Dr. C. Saravanan, NIT Durgapur,
India
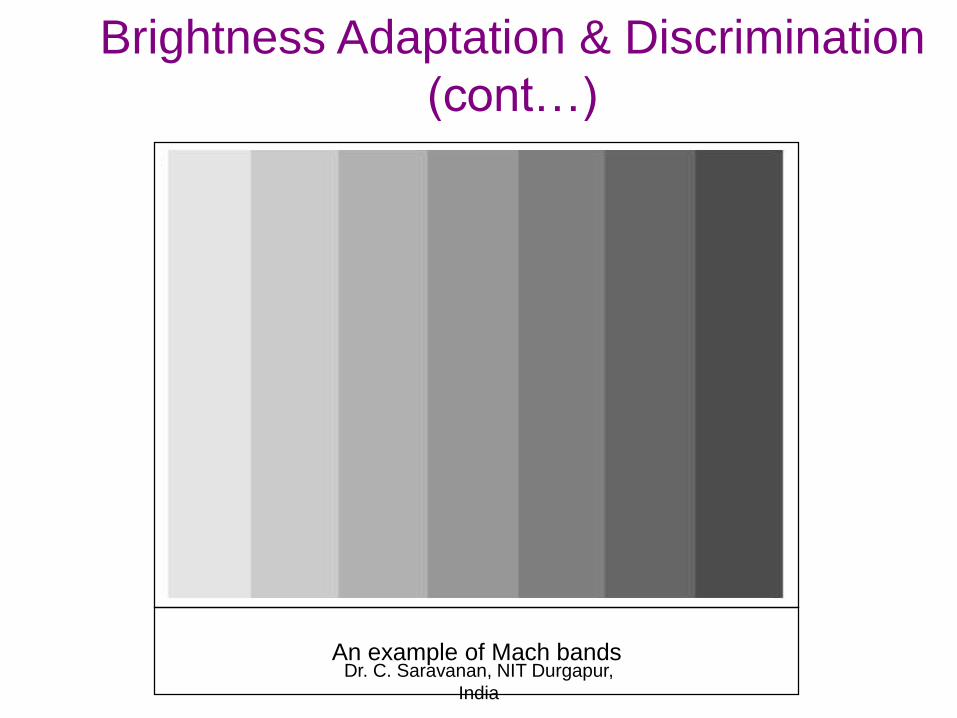
Brightness Adaptation & Discrimination
(cont…)
An example of Mach bandsDr. C. Saravanan, NIT Durgapur,
India
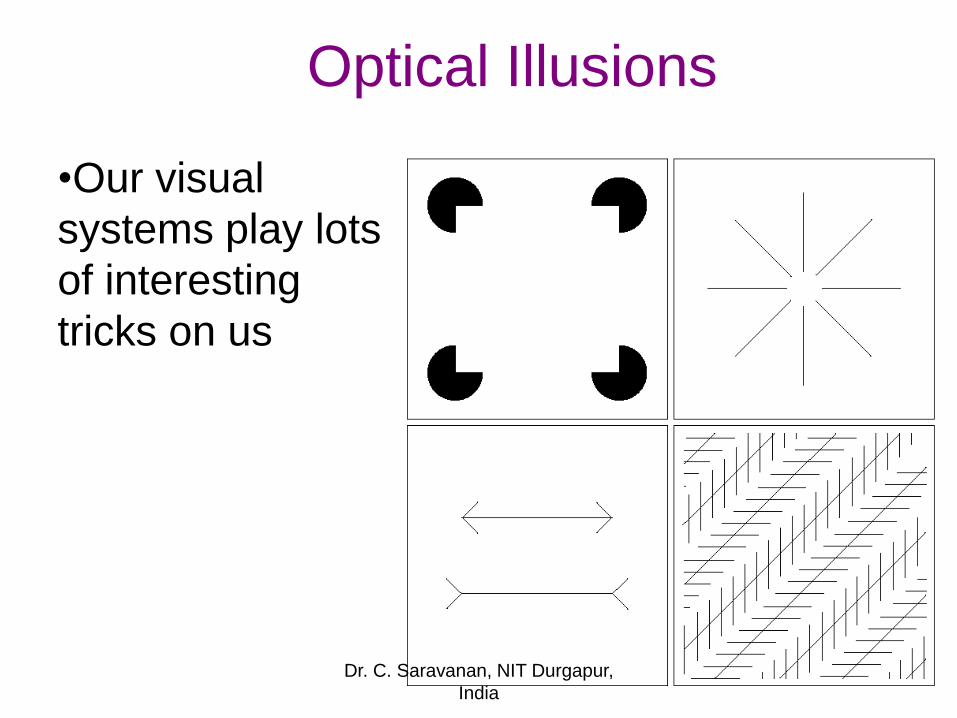
Optical Illusions
•Our visual
systems play lots
of interesting
tricks on us
Dr. C. Saravanan, NIT Durgapur,
India
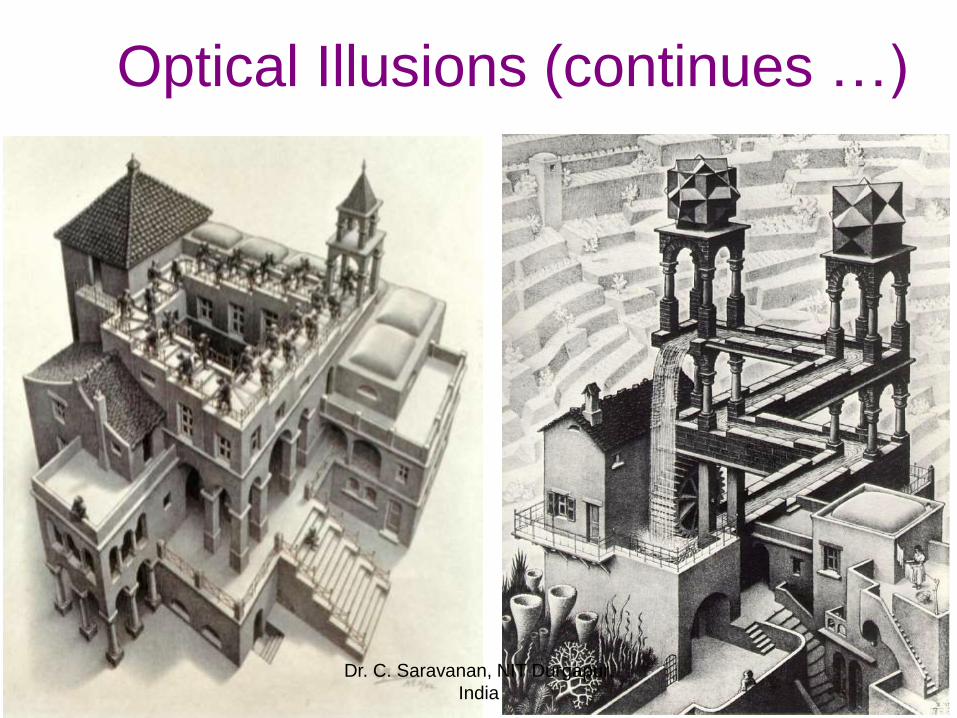
Optical Illusions (continues …)
Dr. C. Saravanan, NIT Durgapur,
India
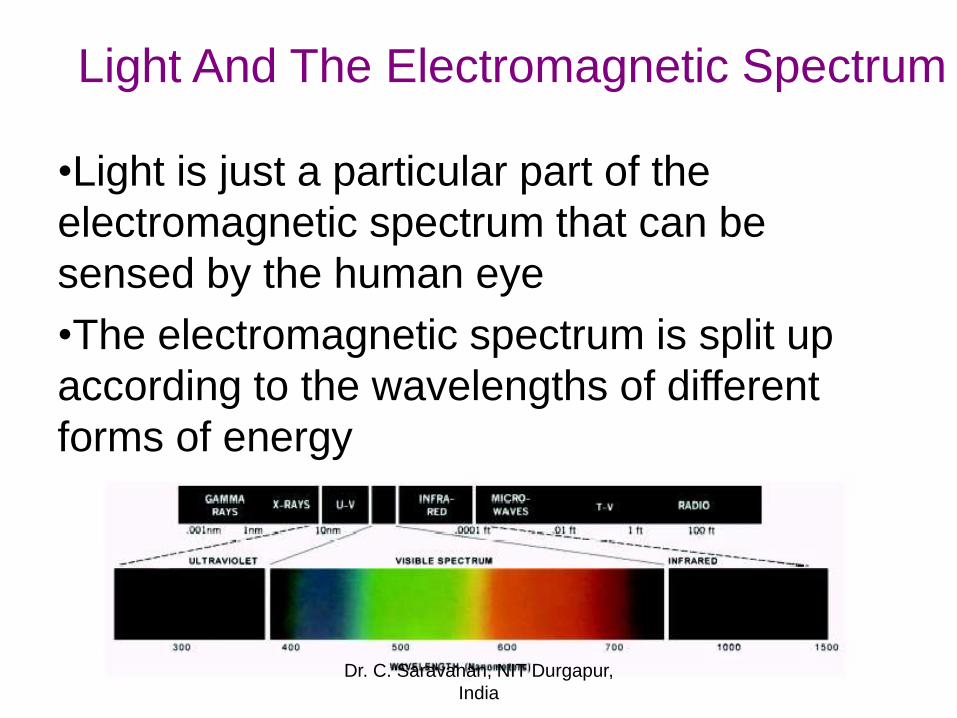
Light And The Electromagnetic Spectrum
•Light is just a particular part of the
electromagnetic spectrum that can be
sensed by the human eye
•The electromagnetic spectrum is split up
according to the wavelengths of different
forms of energy
Dr. C. Saravanan, NIT Durgapur,
India
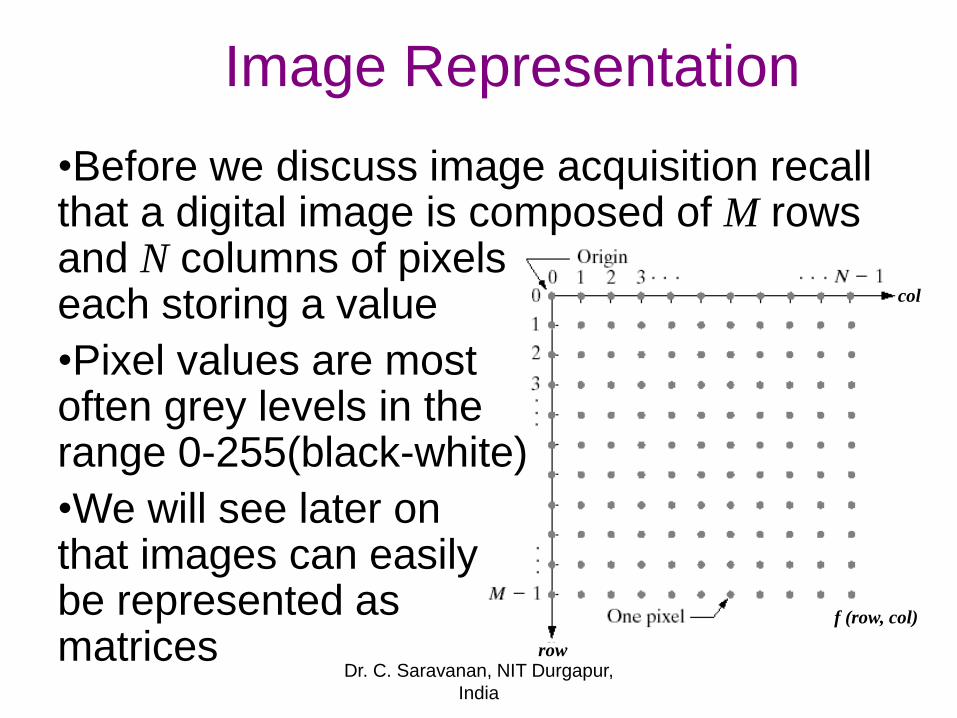
Image Representation
col
row
f (row, col)
•Before we discuss image acquisition recall that a digital image is composed of M rows and N columns of pixels each storing a value
•Pixel values are most often grey levels in the range 0-255(black-white)
•We will see later on that images can easily be represented as matrices
Dr. C. Saravanan, NIT Durgapur,
India
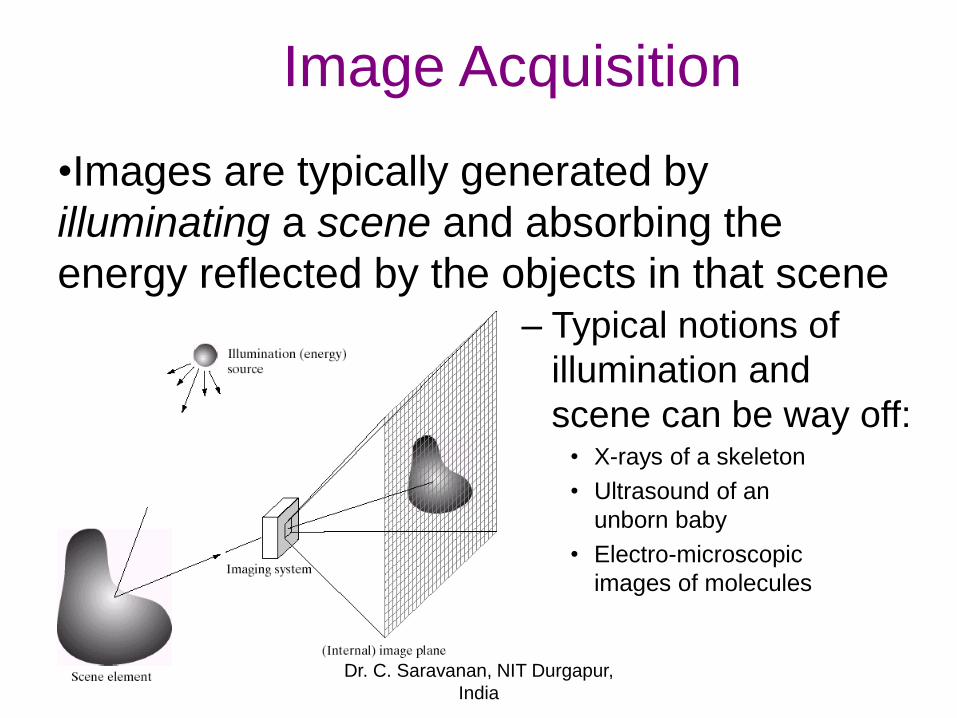
Image Acquisition
•Images are typically generated by
illuminating a scene and absorbing the
energy reflected by the objects in that scene– Typical notions of
illumination and
scene can be way off:• X-rays of a skeleton
• Ultrasound of an
unborn baby
• Electro-microscopic
images of molecules
Dr. C. Saravanan, NIT Durgapur,
India
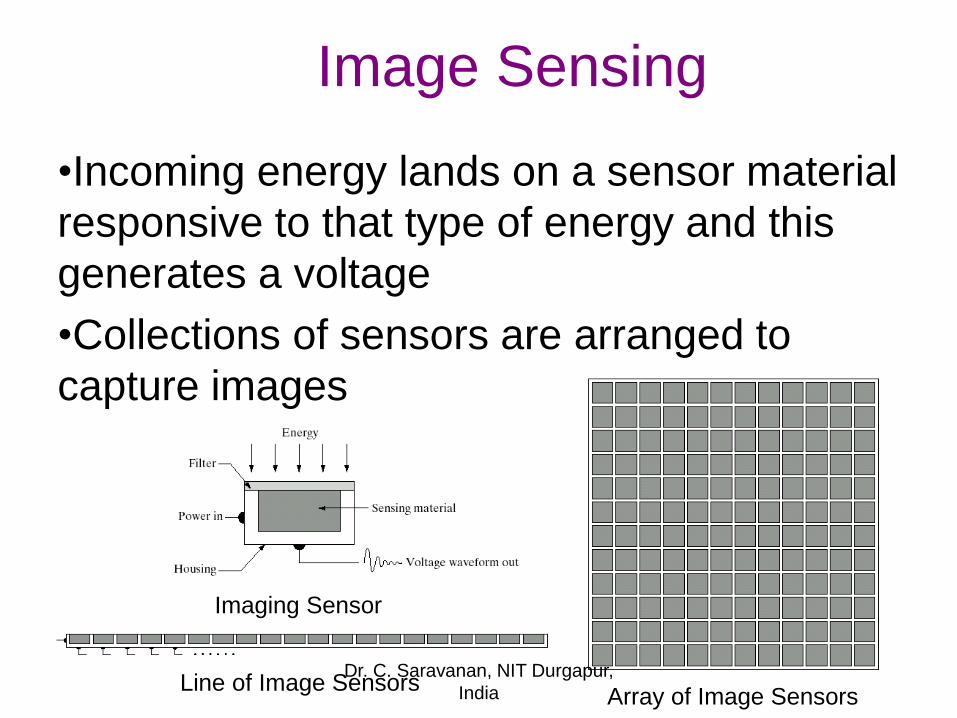
Image Sensing
•Incoming energy lands on a sensor material
responsive to that type of energy and this
generates a voltage
•Collections of sensors are arranged to
capture images
Imaging Sensor
Line of Image SensorsArray of Image Sensors
Dr. C. Saravanan, NIT Durgapur,
India
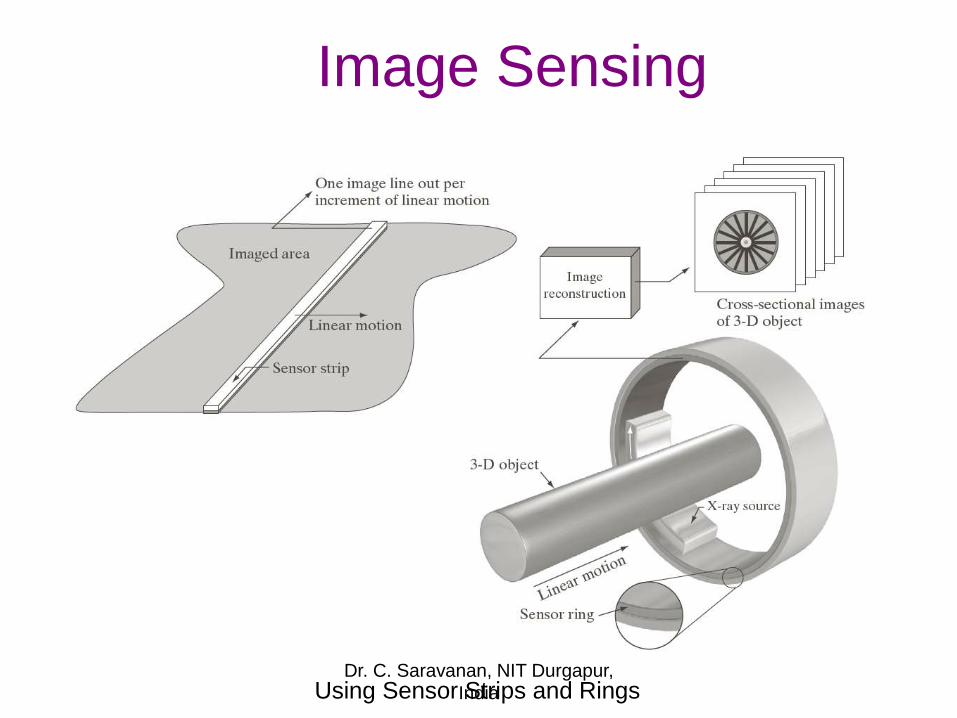
Image Sensing
Using Sensor Strips and RingsDr. C. Saravanan, NIT Durgapur,
India
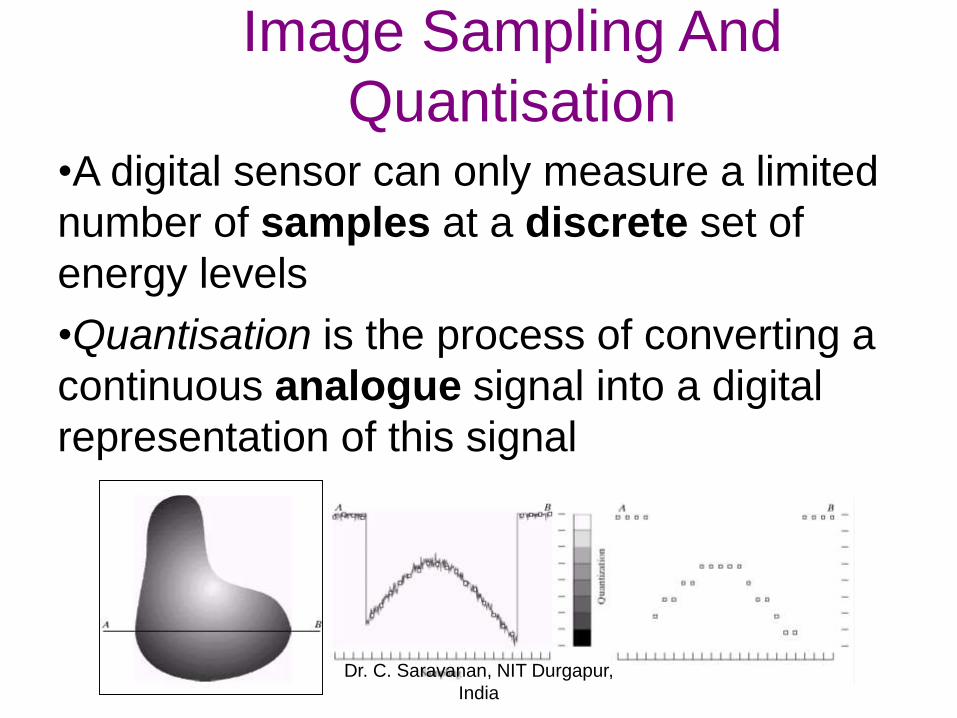
Image Sampling And
Quantisation•A digital sensor can only measure a limited
number of samples at a discrete set of
energy levels
•Quantisation is the process of converting a
continuous analogue signal into a digital
representation of this signal
Dr. C. Saravanan, NIT Durgapur,
India

Image Sampling And Quantisation
(continues …)
•Remember that a digital image is always
only an approximation of a real world
scene
Dr. C. Saravanan, NIT Durgapur,
India
Spatial Resolution
•The spatial resolution of an image is
determined by how sampling was carried out
•Spatial resolution simply refers to the
smallest discernable detail in an image
– Vision specialists will
often talk about pixel
size
– Graphic designers will
talk about dots per
inch (DPI)Dr. C. Saravanan, NIT Durgapur,
India
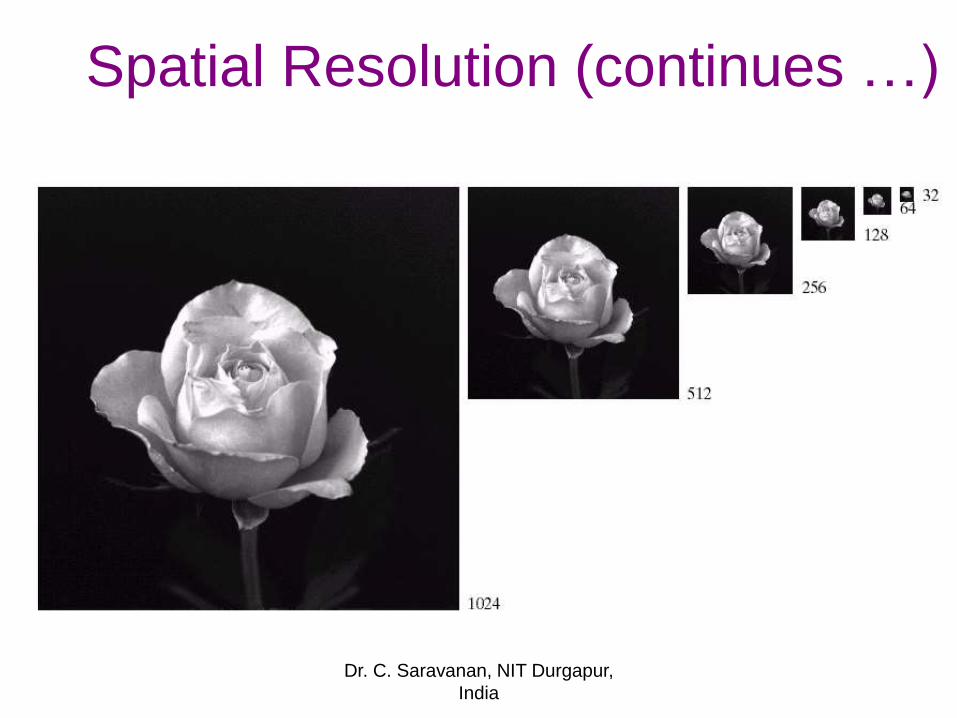
Spatial Resolution (continues …)
Dr. C. Saravanan, NIT Durgapur,
India
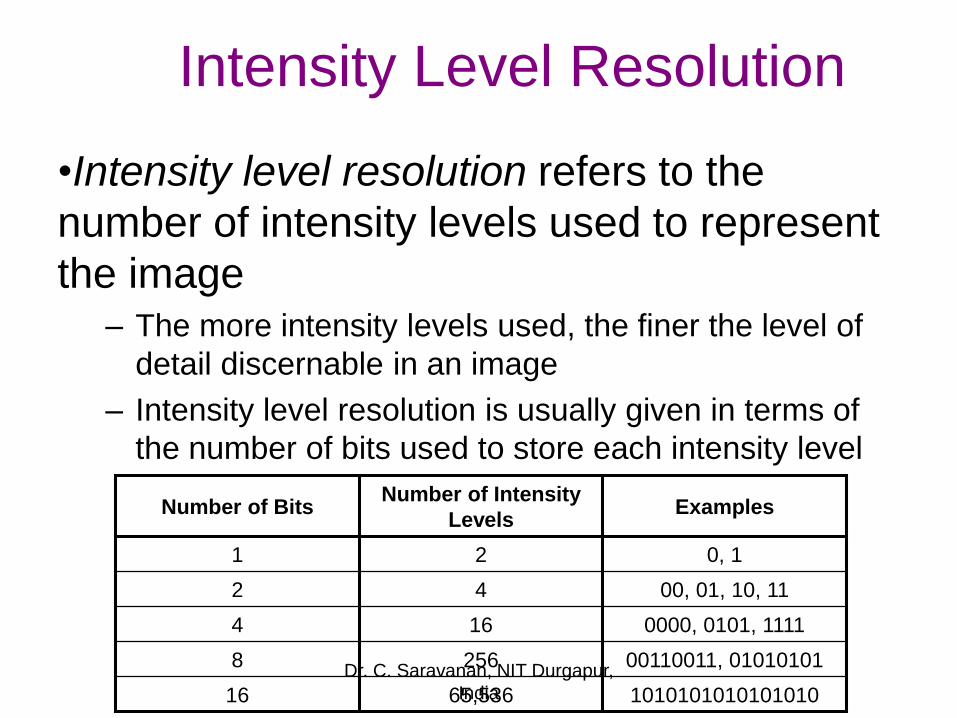
Intensity Level Resolution
•Intensity level resolution refers to the
number of intensity levels used to represent
the image– The more intensity levels used, the finer the level of
detail discernable in an image
– Intensity level resolution is usually given in terms of
the number of bits used to store each intensity level
Number of BitsNumber of Intensity
LevelsExamples
1 2 0, 1
2 4 00, 01, 10, 11
4 16 0000, 0101, 1111
8 256 00110011, 01010101
16 65,536 1010101010101010
Dr. C. Saravanan, NIT Durgapur,
India
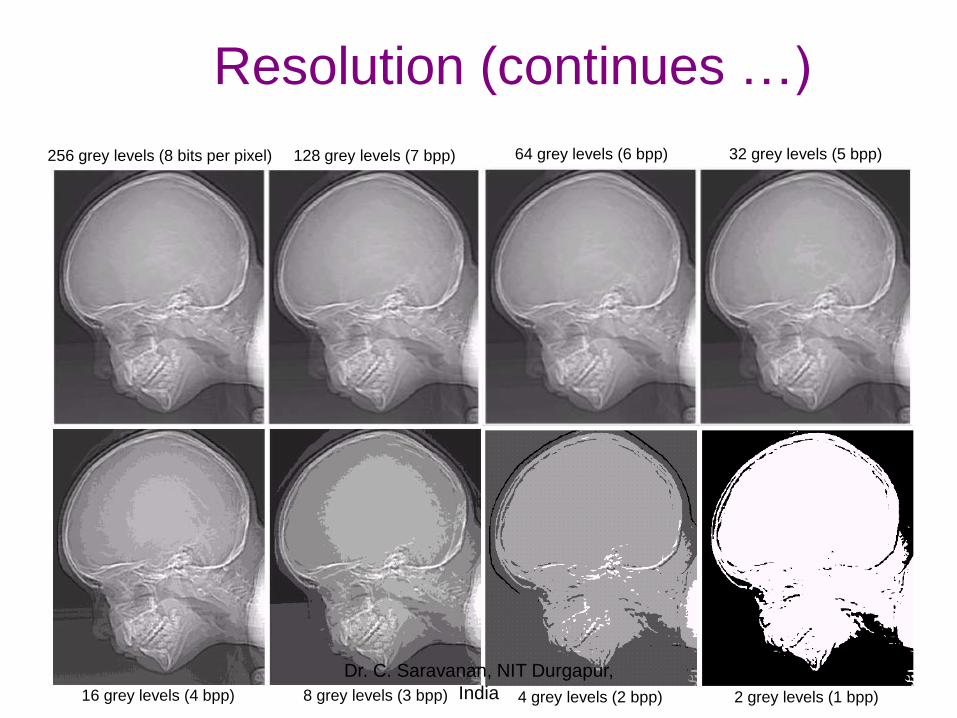
Resolution (continues …)
128 grey levels (7 bpp) 64 grey levels (6 bpp) 32 grey levels (5 bpp)
16 grey levels (4 bpp) 8 grey levels (3 bpp) 4 grey levels (2 bpp) 2 grey levels (1 bpp)
256 grey levels (8 bits per pixel)
Dr. C. Saravanan, NIT Durgapur,
India
Resolution: How Much Is
Enough?•The big question with resolution is always
how much is enough?
– This all depends on what is in the image and
what you would like to do with it
– Key questions include
• Does the image look aesthetically pleasing?
• Can you see what you need to see within the
image?
Dr. C. Saravanan, NIT Durgapur,
India
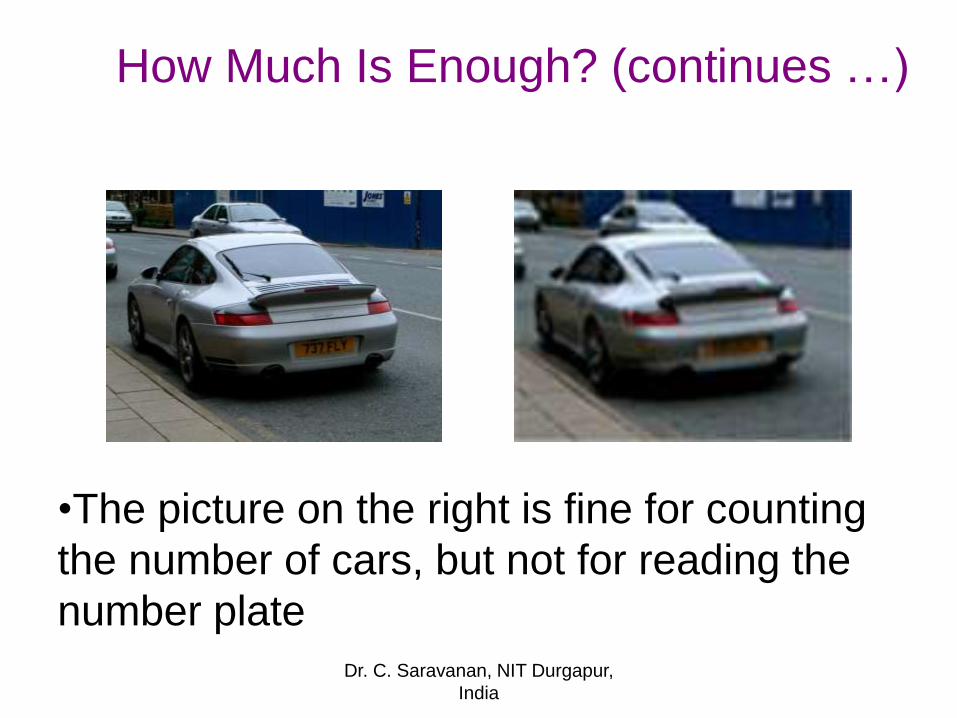
How Much Is Enough? (continues …)
•The picture on the right is fine for counting
the number of cars, but not for reading the
number plate
Dr. C. Saravanan, NIT Durgapur,
India

Resolution (continues …)
Low Detail Medium Detail High Detail
Dr. C. Saravanan, NIT Durgapur,
India
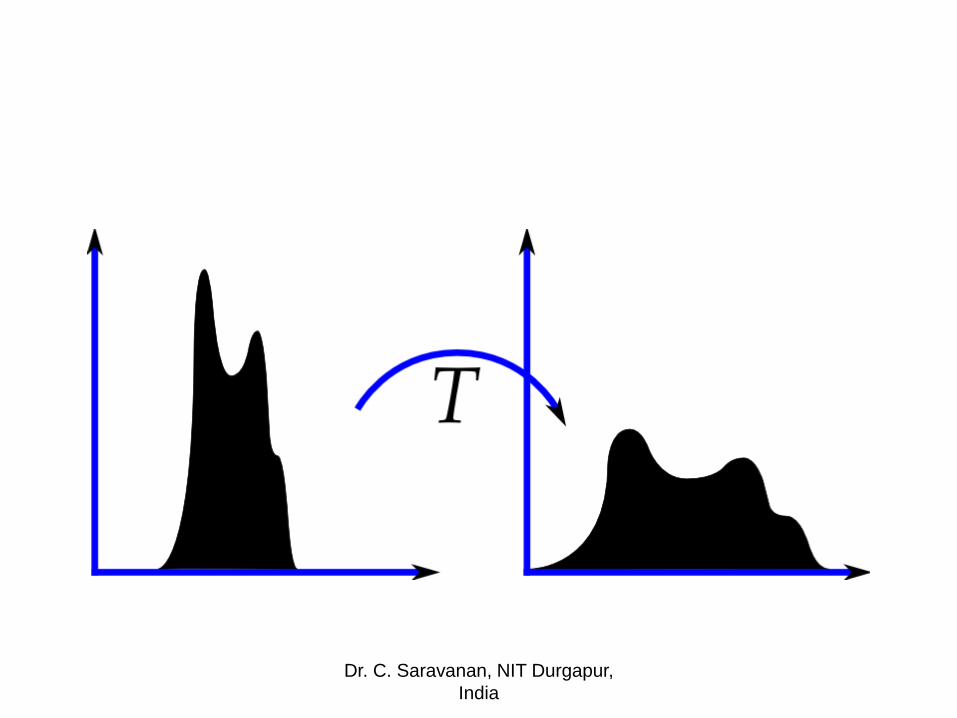
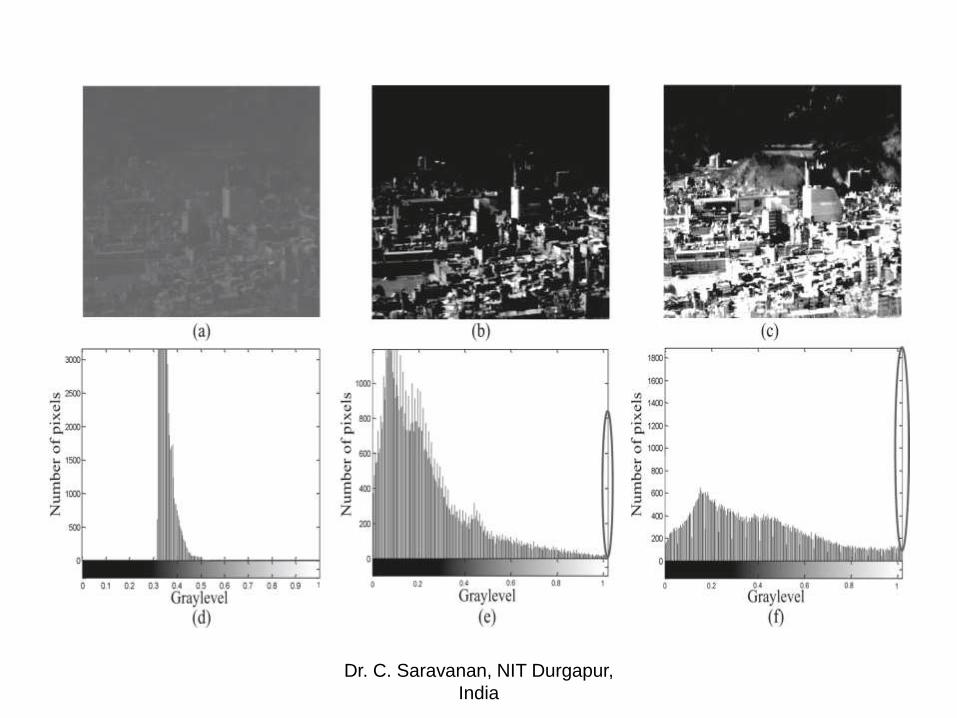
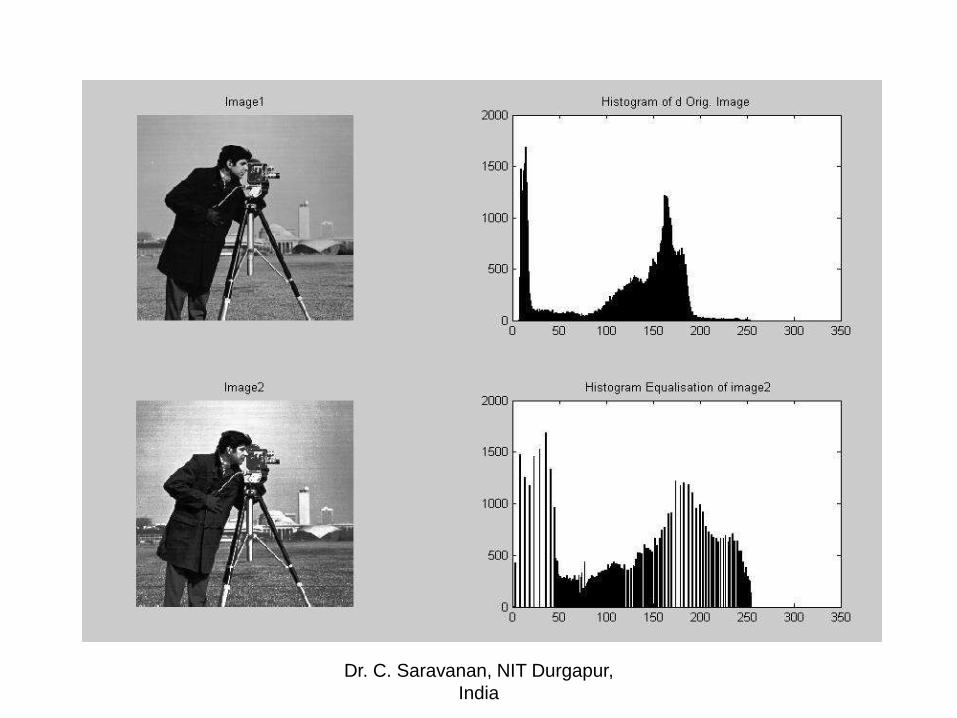
Histogram Equalization
• Histogram equalization is a technique for
adjusting image intensities to enhance contrast.
• Let f be a given image represented as a m by n
matrix of integer pixel intensities ranging from 0
to L − 1.
• L is the number of possible intensity values,
often 256.
• Let p denote the normalized histogram of f with a
bin for each possible intensity.
Dr. C. Saravanan, NIT Durgapur,
India
HE Formula
• Pn= number of pixels with intensity n /
total number of pixels,
• n=0, 1, 2, ... L-1
Histogram Equalized image G = floor ((L-1)
Summation of Pn from n=0 to Fi,j)
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Correlation and Convolution
• Correlation and Convolution are basic operations that we will perform to extract information from images.
• They are shift-invariant, and they are linear.
• Shift-invariant means that we perform the same operation at every point in the image.
• Linear means that we replace every pixel with a linear combination of its neighbors.
Dr. C. Saravanan, NIT Durgapur,
India
Correlation
• Performed by Local Averaging
Image I = {5,4,2,3,7,4,6,5,3,6}
Fourth value 3 is replaced with average of 2, 3, 7 (neighbours)
J(4)=(I(3)+I(4)+I(5))/3=(2+3+7)/3=4
Dr. C. Saravanan, NIT Durgapur,
India
2D correlation
8 3 4 8 8 3 4 4 6.44 5.22 4
7 6 4 8 8 3 4 4 5.77 5.33 4.88
4 5 7 7 7 6 4 4 5.11 5.44 5.77
4 4 5 7 7
4 4 5 7 7
Dr. C. Saravanan, NIT Durgapur,
India
Convolution
• Convolution is just like correlation, except
that flip over the filter before correlating.
• For example, convolution of a 1D image
with the filter (3,7,5) is exactly the same as
correlation with the filter (5,7,3).
• In the case of 2D convolution flip the filter
both horizontally and vertically.
Dr. C. Saravanan, NIT Durgapur,
India
Filtering
• Images are often corrupted by random variations
in intensity, illumination, or have poor contrast
and can’t be used directly
• Filtering: transform pixel intensity values to
reveal certain image characteristics
– Enhancement:improves contrast
– Smoothing: remove noises
– Template matching: detects known patterns
Dr. C. Saravanan, NIT Durgapur,
India
Smoothing Filters
• Additive smoothing / Laplace / Lidstone
• Butterworth filter
• Digital filter
• Kalman filter
• Kernel smoother
• Laplacian smoothing
• Stretched grid method
• Low-pass filter
• Savitzky–Golay smoothing filter based on the least-squares fitting of polynomials
• Local regression also known as "loess" or "lowess"
• Smoothing spline
• Ramer–Douglas–Peucker algorithm
• Moving average
• Exponential smoothing
• Kolmogorov–Zurbenko filter
Dr. C. Saravanan, NIT Durgapur,
India
Sharpening Filters
• A high-pass filter can be used to make an
image appear sharper.
• If there is no change in intensity, nothing
happens. But if one pixel is brighter than
its immediate neighbors, it gets boosted.
0 -1/4 0
-1/4 +2 -1/4
0 -1/4 0
Dr. C. Saravanan, NIT Durgapur,
India
Unsharp Mask
• An unsharp mask is simply another type of
high-pass filter.
• First, a mask is formed by low-pass
filtering an image.
• This mask is then subtracted from the
original image.
• This has the effect of sharpening the
image.
Dr. C. Saravanan, NIT Durgapur,
India
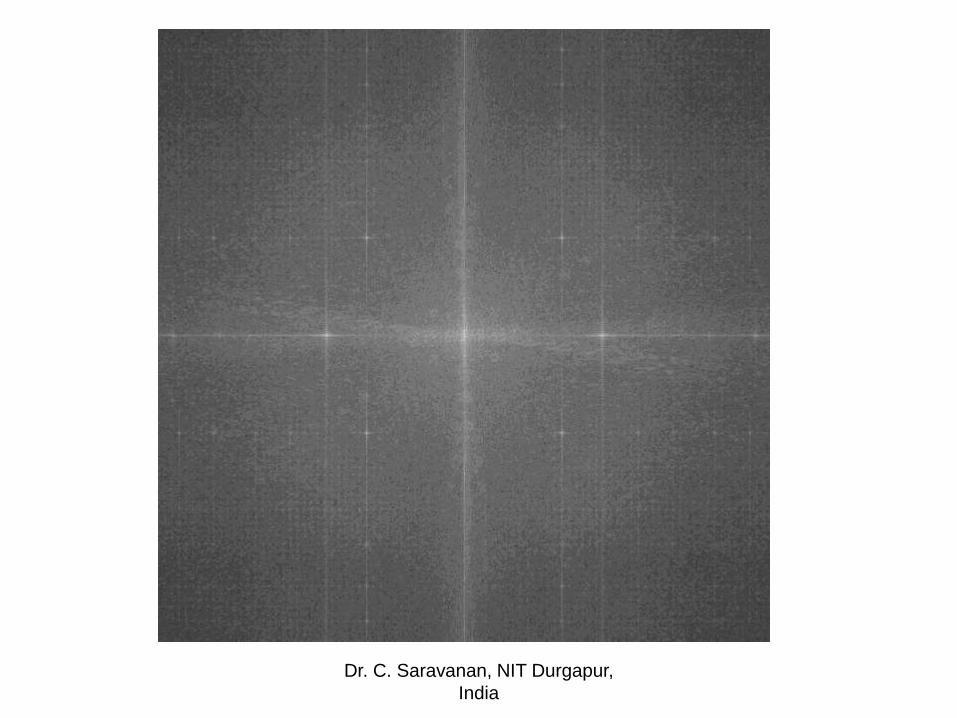
Fourier Transform
• The Fourier Transform is used to decompose an image into its sine and cosine components.
• The output of the transformation represents the image in the Fourier or frequency domain, while the input image is the spatial domain equivalent.
• In the Fourier domain image, each point represents a particular frequency contained in the spatial domain image.
Dr. C. Saravanan, NIT Durgapur,
India
Discrete Fourier Transform
• Jean Baptiste Joseph Fourier (1768--1830), a French mathematician and physicist.
• Fourier transform is linear!
• It possesses the properties ofhomogeneity and additivity.
• Time / Frequency Domain.
Dr. C. Saravanan, NIT Durgapur,
India
DFT
• The DFT is the sampled Fourier Transform and therefore does not contain all frequencies forming an image, but only a set of samples which is large enough to fully describe the spatial domain image.
• The number of frequencies corresponds to the number of pixels in the spatial domain image, i.e. the image in the spatial and Fourier domain are of the same size.
Dr. C. Saravanan, NIT Durgapur,
India
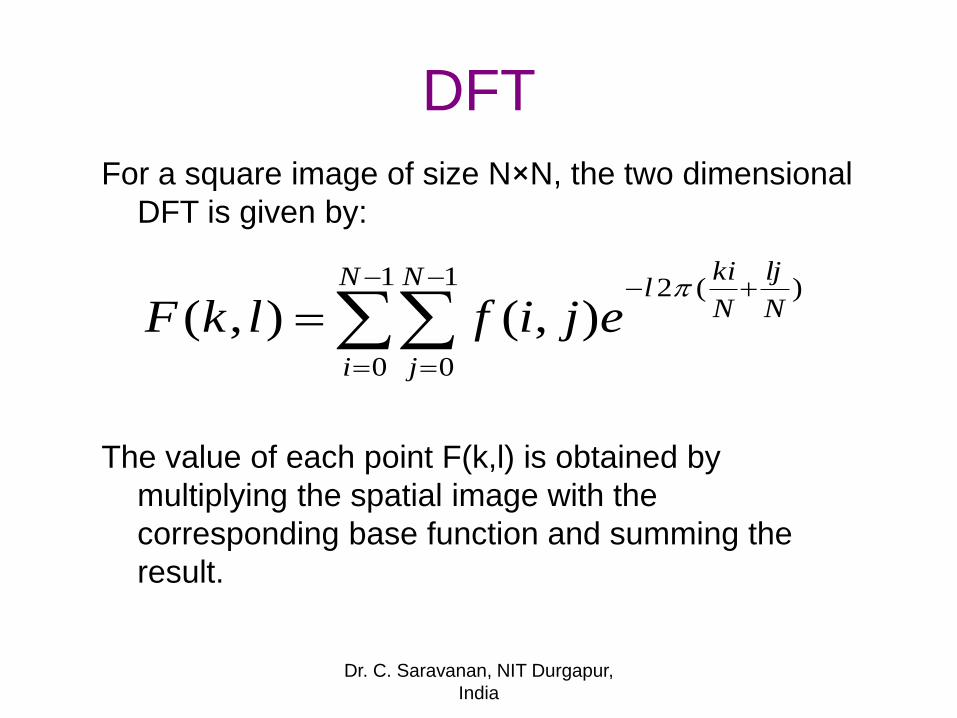
DFT
For a square image of size N×N, the two dimensional
DFT is given by:
1
0
1
0
)(2
),(),(N
i
N
j
N
lj
N
kil
ejiflkF
The value of each point F(k,l) is obtained by
multiplying the spatial image with the
corresponding base function and summing the
result.
Dr. C. Saravanan, NIT Durgapur,
India
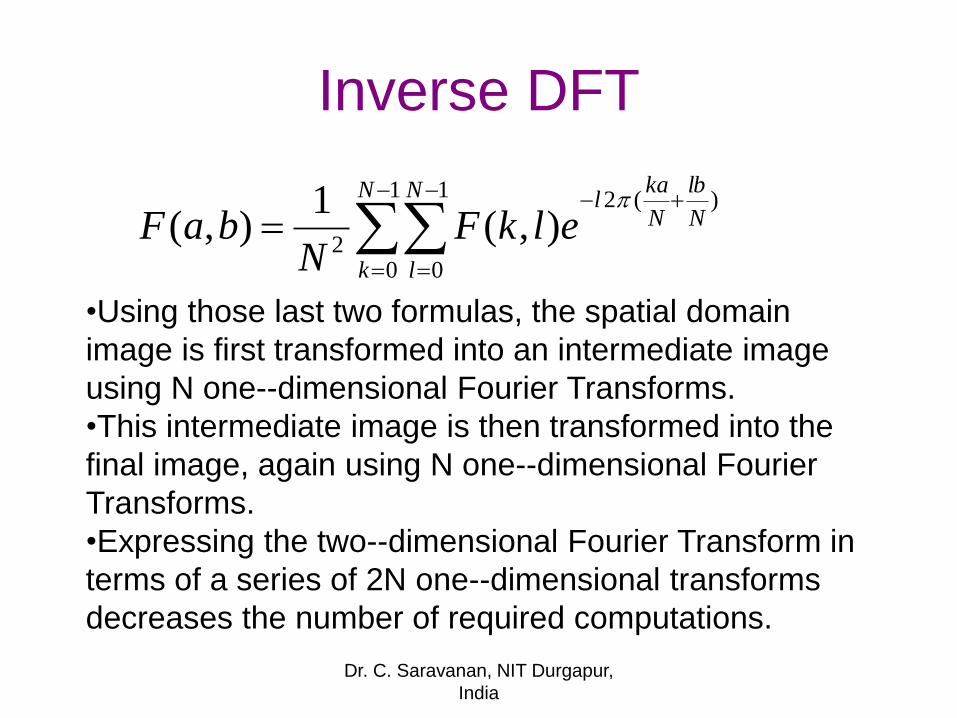
Inverse DFT
1
0
1
0
)(2
2),(
1),(
N
k
N
l
N
lb
N
kal
elkFN
baF
•Using those last two formulas, the spatial domain
image is first transformed into an intermediate image
using N one--dimensional Fourier Transforms.
•This intermediate image is then transformed into the
final image, again using N one--dimensional Fourier
Transforms.
•Expressing the two--dimensional Fourier Transform in
terms of a series of 2N one--dimensional transforms
decreases the number of required computations.
Dr. C. Saravanan, NIT Durgapur,
India
Discrete Cosine Transform (DCT)
• The DCT transforms a signal or image from the spatial domain to the frequency domain.
• The DCT-II is often used in signal and image processing, especially for lossy data compression, because it has a strong "energy compaction" property.
• Modified Discrete Cosine Transform (MDCT) (based on the DCT-IV), is used in JPEG, AAC, Vorbis, WMA, MP3, MJPEG, MPEG, DV, Daala, and Theora.
Dr. C. Saravanan, NIT Durgapur,
India
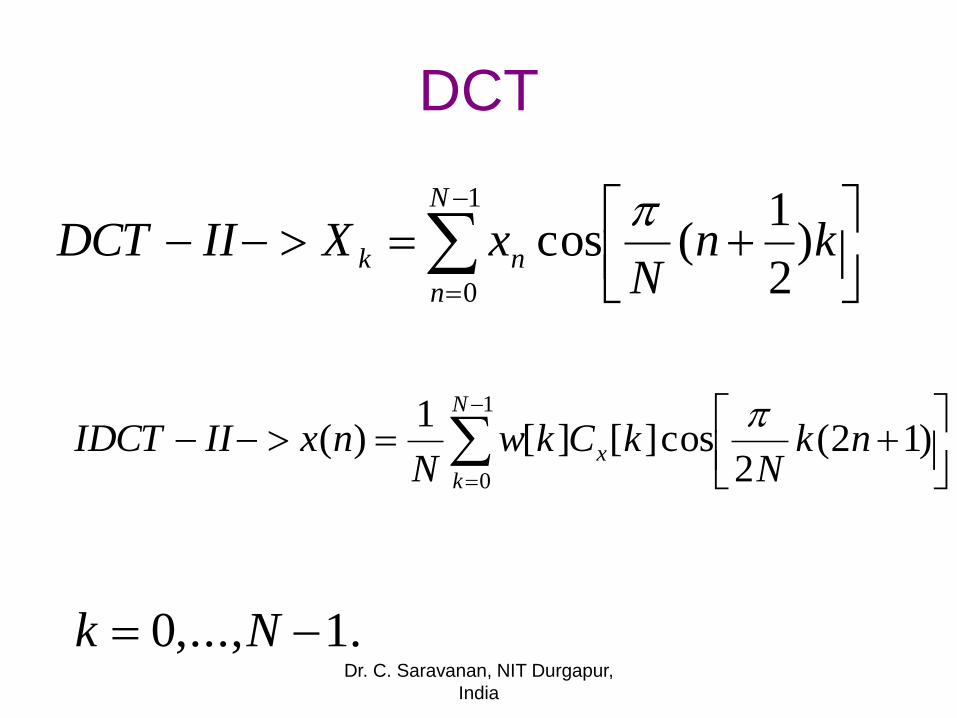
DCT
1
0
)2
1(cos
N
n
nk knN
xXIIDCT
.1,...,0 Nk
1
0
)12(2
cos][][1
)(N
k
x nkN
kCkwN
nxIIIDCT
Dr. C. Saravanan, NIT Durgapur,
India
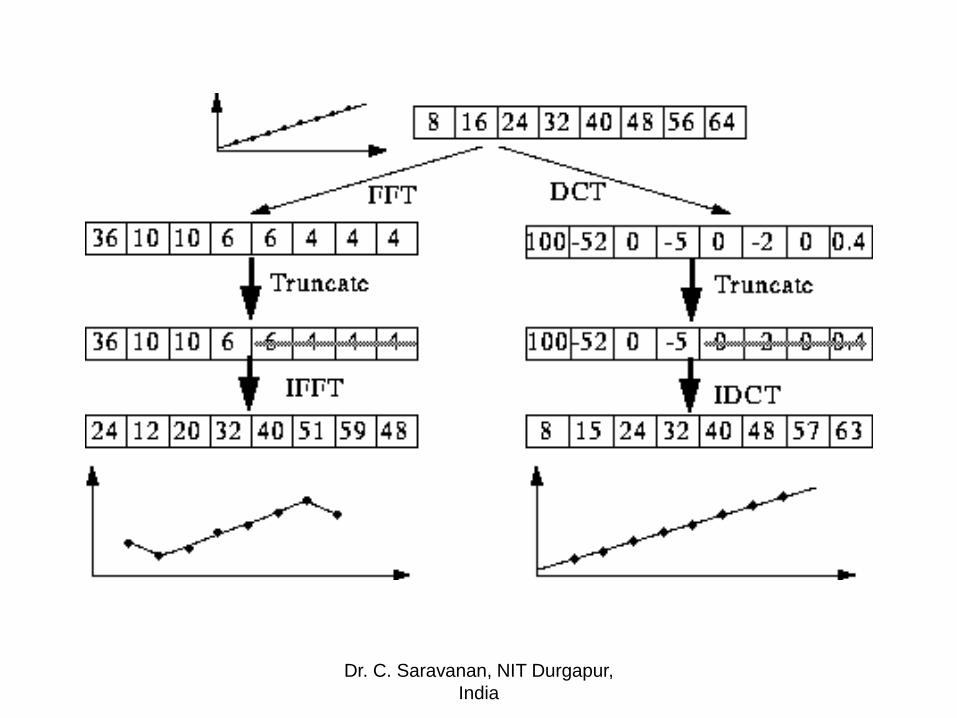
FT vs. DCT
• DCT use Cosine functions and real coefficients.
• FT use both Sines and Cosines and complex numbers.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
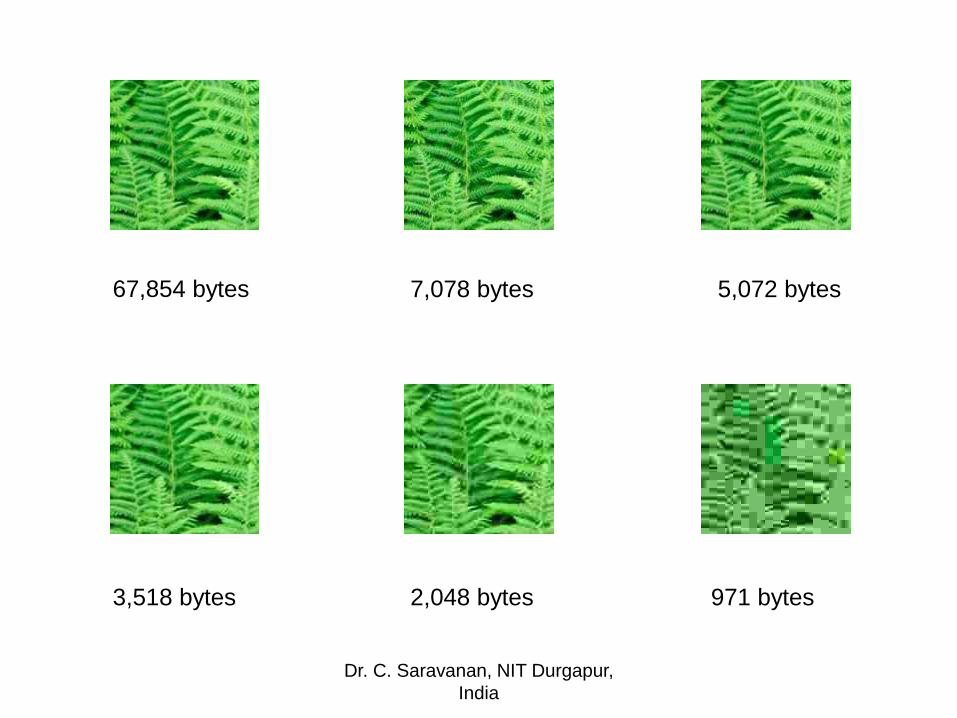
67,854 bytes 7,078 bytes 5,072 bytes
3,518 bytes 2,048 bytes 971 bytes
Dr. C. Saravanan, NIT Durgapur,
India
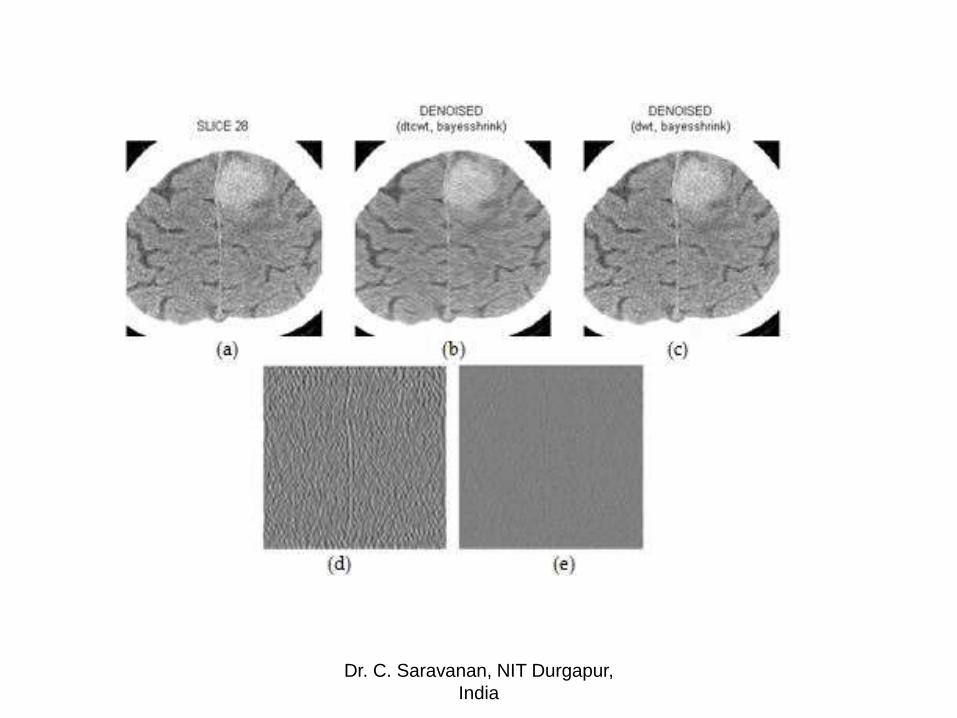
Discrete Wavelet Transform
• In mathematics, a wavelet series is a
representation of a square-integrable (real- or
complex-valued) function by a certain
orthonormal series generated by a wavelet.
• Wavelet-transformation contains information
similar to the short-time-Fourier-transformation,
but with additional properties of the wavelets,
which show up at the resolution in time at higher
analysis frequencies of the basis function.
Dr. C. Saravanan, NIT Durgapur,
India
DWT
• The discrete wavelet transform (DWT) is a linear transformation that operates on a data vector whose length is an integer power of two,transforming it into a numerically different vector of the same length.
• It is a tool that separates data into different frequency components, and then studies each component with resolution matched to its scale.
Dr. C. Saravanan, NIT Durgapur,
India
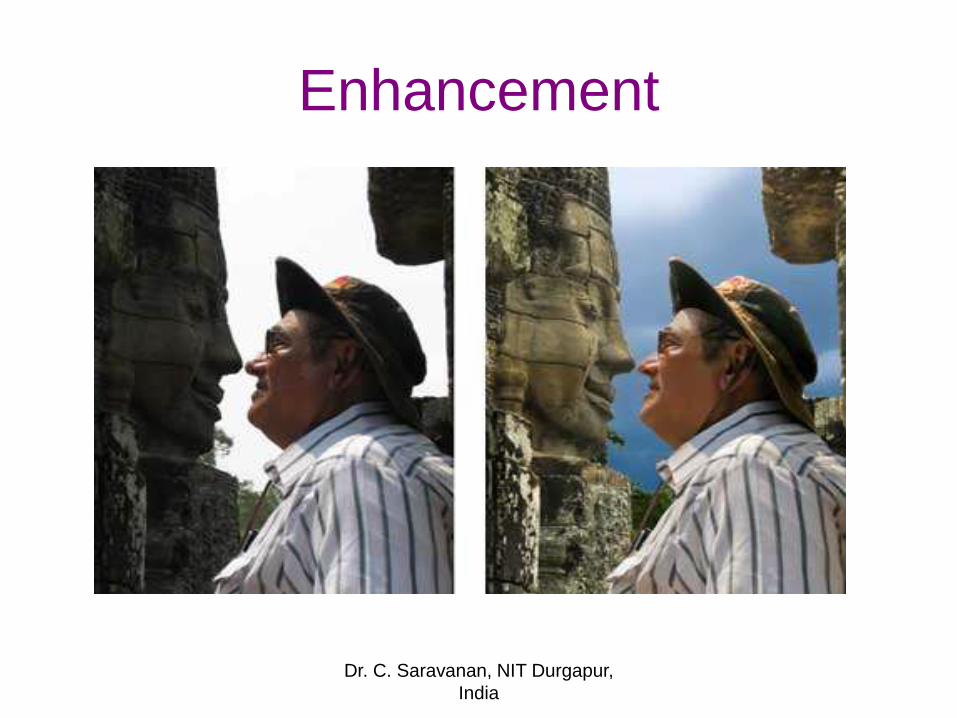
Enhancement
Dr. C. Saravanan, NIT Durgapur,
India
1 Selection
2 Layers
3 Image size alteration
4 Cropping an image
5 Histogram
6 Noise reduction
7 Removal of unwanted elements
8 Selective color change
9 Image orientation
10 Perspective control and distortion
11 Lens correction
12 Enhancing images
13 Sharpening and softening images
14 Selecting and merging of images
15 Slicing of images
16 Special effects
17 Stamp Clone Tool
18 Change color depth
19 Contrast change and brightening
20 Gamma correction
21 Color adjustments
22 Printing
23 Warping
Dr. C. Saravanan, NIT Durgapur,
India
Noise reduction
• Salt and pepper noise
• Gaussian noise
• Shot noise
• Quantization noise (uniform noise)
• Film grain
• Anisotropic noise
Dr. C. Saravanan, NIT Durgapur,
India
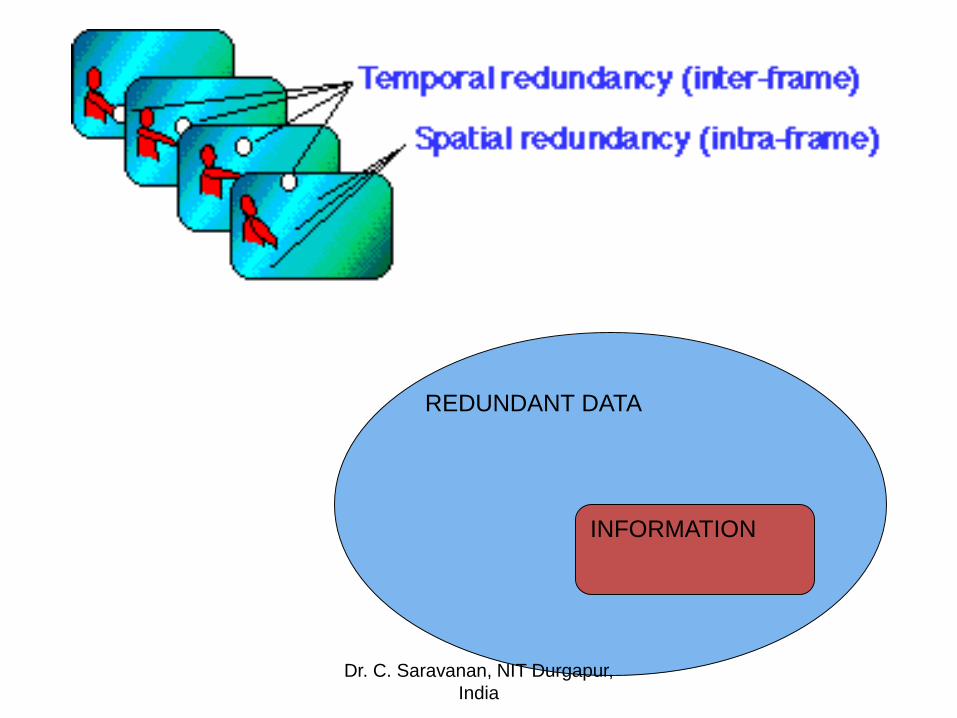
Image Compression
• Lossy and lossless compression
• Data compression refers to the process of reducing the amount of data required to represent given quantity of information.
• Data redundancy is the central concept in image compression and can be mathematically defined.
• IMAGE = INFORMATION + REDUNDANT DATA
Dr. C. Saravanan, NIT Durgapur,
India
Compression Ratio
• CR=n1 / n2
• CR - Compression Ratio
• n1 -Source image
• n2 - Compressed image
Dr. C. Saravanan, NIT Durgapur,
India

Types of Redundancy
• Coding redundancy
• Interpixel redundancy
• Psychovisual redundancy
• Coding Redundancy : A code is a system of symbols (i.e. bytes, bits) that represents information.
• Interpixel correlations
• Certain information has relatively less importance for the quality of image perception. This information is said to be psychovisually redundant.
Dr. C. Saravanan, NIT Durgapur,
India
Huffman Coding
• Set of symbols and probability are
collected.
• Binary tree is formed using probability.
• The shortest codeword is given for the
symbol/pixel with the highest probability.
• The longest codeword is given for the
symbol/pixel with the lowest probability.
Dr. C. Saravanan, NIT Durgapur,
India
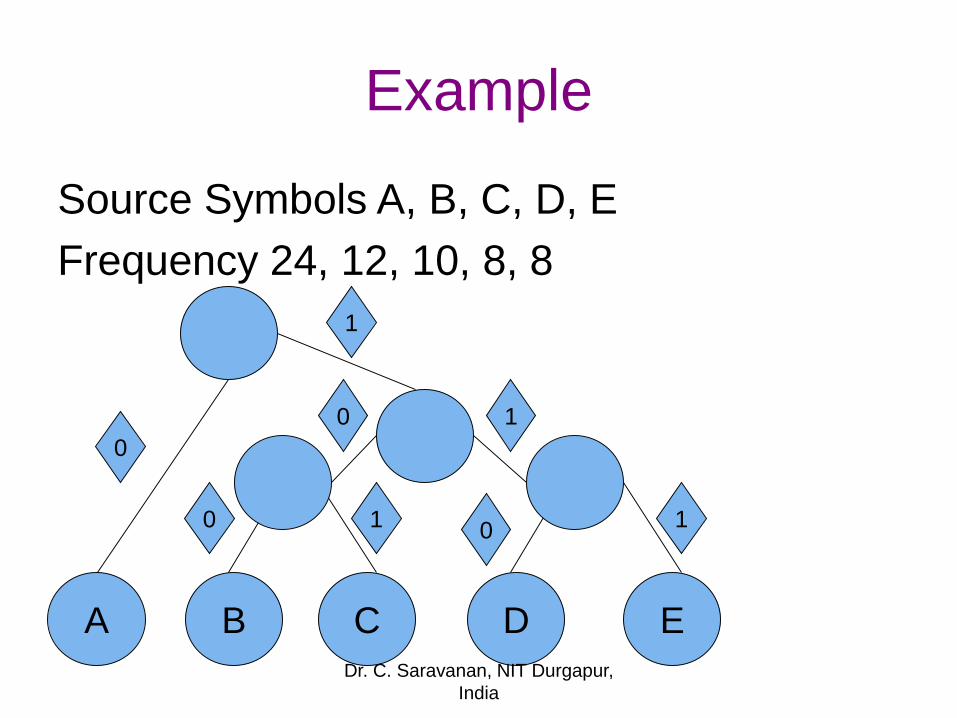
Example
Source Symbols A, B, C, D, E
Frequency 24, 12, 10, 8, 8
A B C D E
0
0 0
0
1
1 1
1
Dr. C. Saravanan, NIT Durgapur,
India
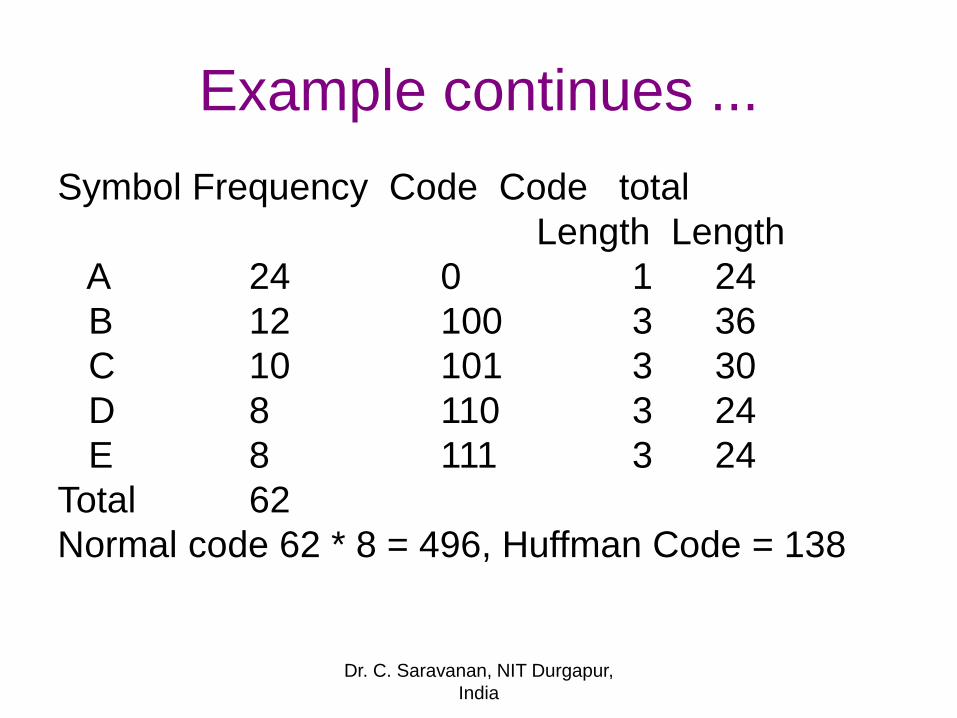
Example continues ...
Symbol Frequency Code Code total
Length Length
A 24 0 1 24
B 12 100 3 36
C 10 101 3 30
D 8 110 3 24
E 8 111 3 24
Total 62
Normal code 62 * 8 = 496, Huffman Code = 138
Dr. C. Saravanan, NIT Durgapur,
India
Arithmetic Coding
• A form of entropy encoding used in lossless data compression.
• Normally, a string of characters such as the words "hello there" is represented using a fixed number of bits per character, as in the ASCII code.
• Arithmetic coding encodes the entire message into a single number, a fraction nwhere (0.0 ≤ n < 1.0).
Dr. C. Saravanan, NIT Durgapur,
India
Arithmetic Encoding
• Probability is calculated for each unique symbol.
• Based on the probability value range is calculated for each unique symbol.
Step 1: Initially, L=0 and R=1.
Step 2: Read Symbol (S)
Step 3: R=L+(R-L) X CIV
Step 4: L=L+(R-L) X OIV
Step 5: Repeat steps 2-4 until symbols.
Step 6: Any value between L and R is encoded value (EV) normally L is referred.
Dr. C. Saravanan, NIT Durgapur,
India
Arithmetic Decoding
Step 1: Read the encoded value (EV)
2: Find the matching range value
3: Popup the corresponding symbol
4: EV=EV-OIV
5: EV=EV/(CIV-OIV)
6: Repeat steps 2-5 until EV reaches 0
Dr. C. Saravanan, NIT Durgapur,
India
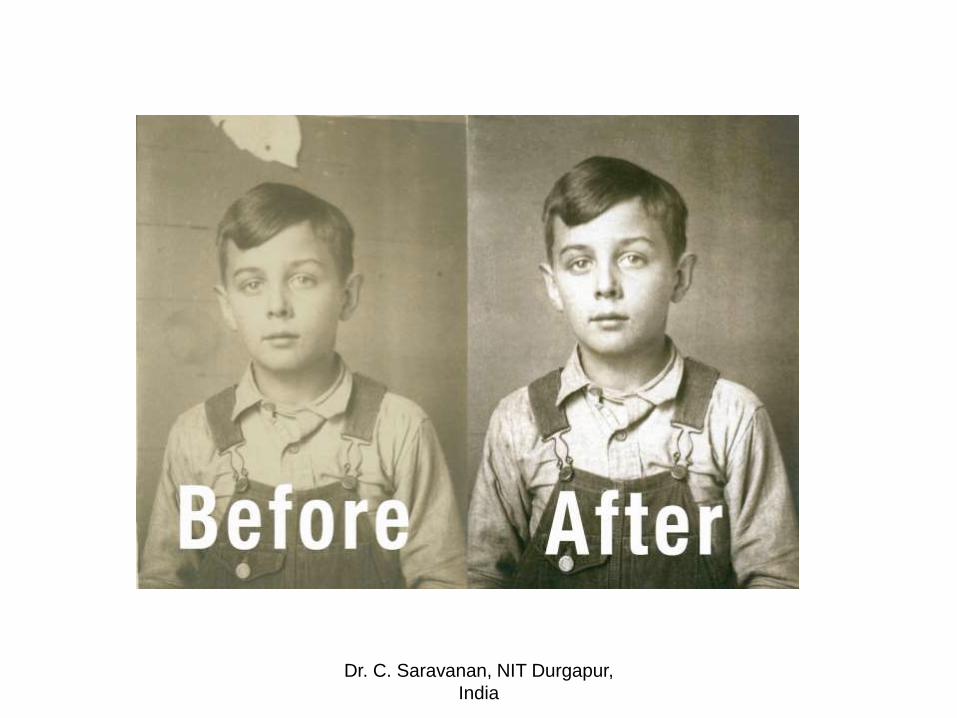
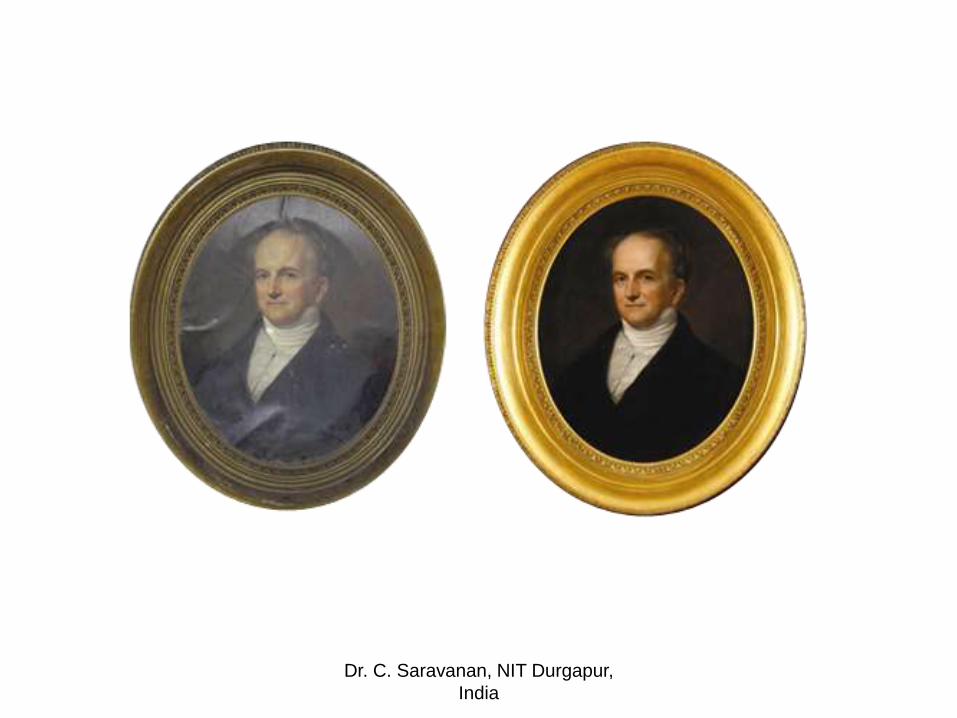
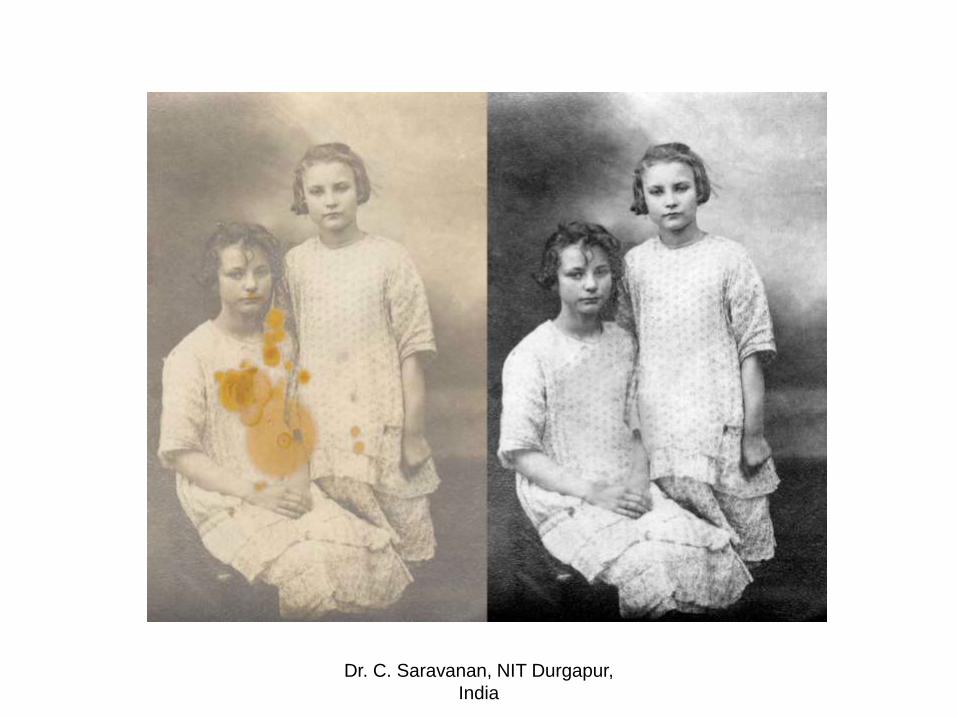
Image Restoration
• A photograph blurred by a defocused camera is analyzed to determine the nature of the blur.
• Degradation comes in many forms such as motion blur, noise, and camera misfocus.
• It is possible to come up with an very good estimate of the actual blurring function and "undo" the blur to restore the original image
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Application Domains
• Scientific explorations
• Legal investigations
• Film making and archival
• Image and video (de-)coding
....
• Consumer photography
Dr. C. Saravanan, NIT Durgapur,
India
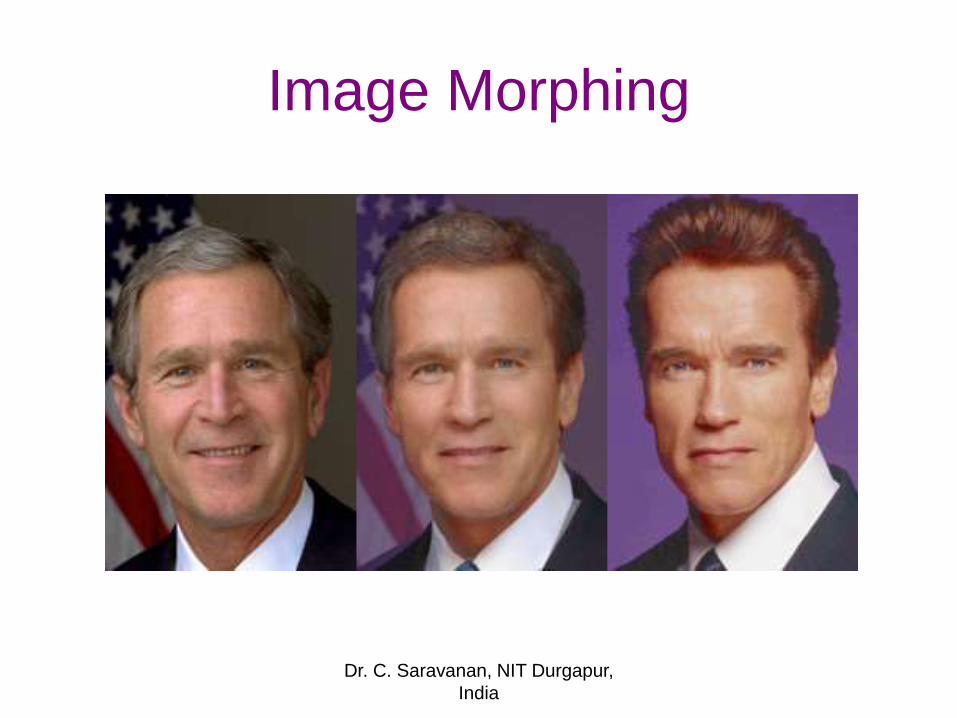
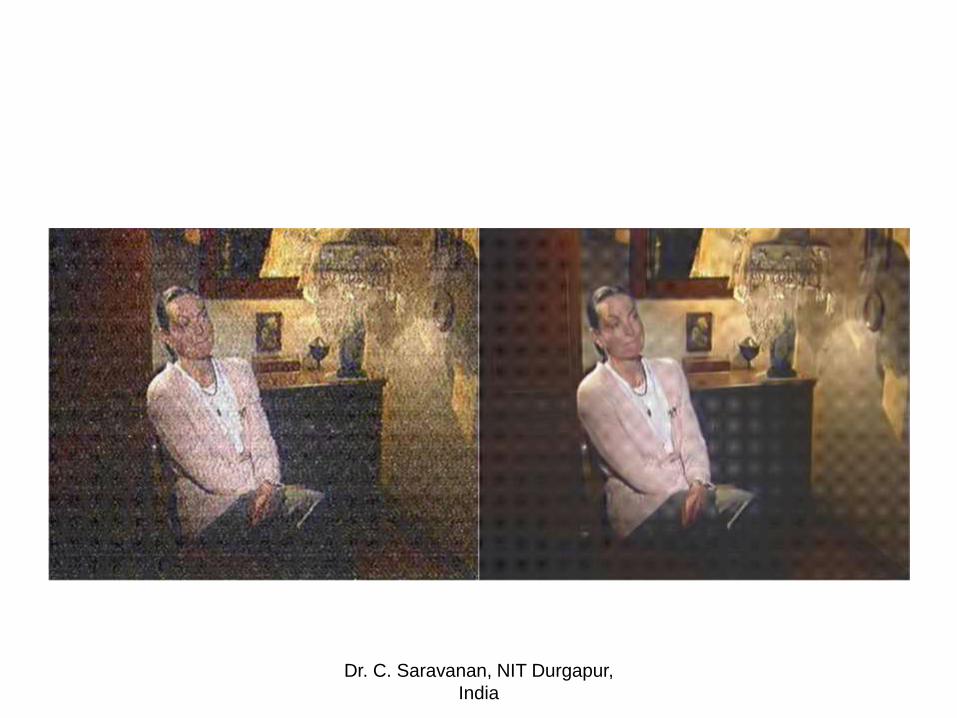
Image Morphing
Dr. C. Saravanan, NIT Durgapur,
India
• Depict one person turning into another
• Morphing is a special effect in motion
pictures and animations that changes (or
morphs) one image or shape into another
through a seamless transition.
• Achieved through cross-fading techniques
Dr. C. Saravanan, NIT Durgapur,
India
• Morphing is an image processing
technique used for the metamorphosis
from one image to another.
• Cross-dissolve between them
• The color of each pixel is interpolated over
time from the first image value to the
corresponding second image value.
Dr. C. Saravanan, NIT Durgapur,
India
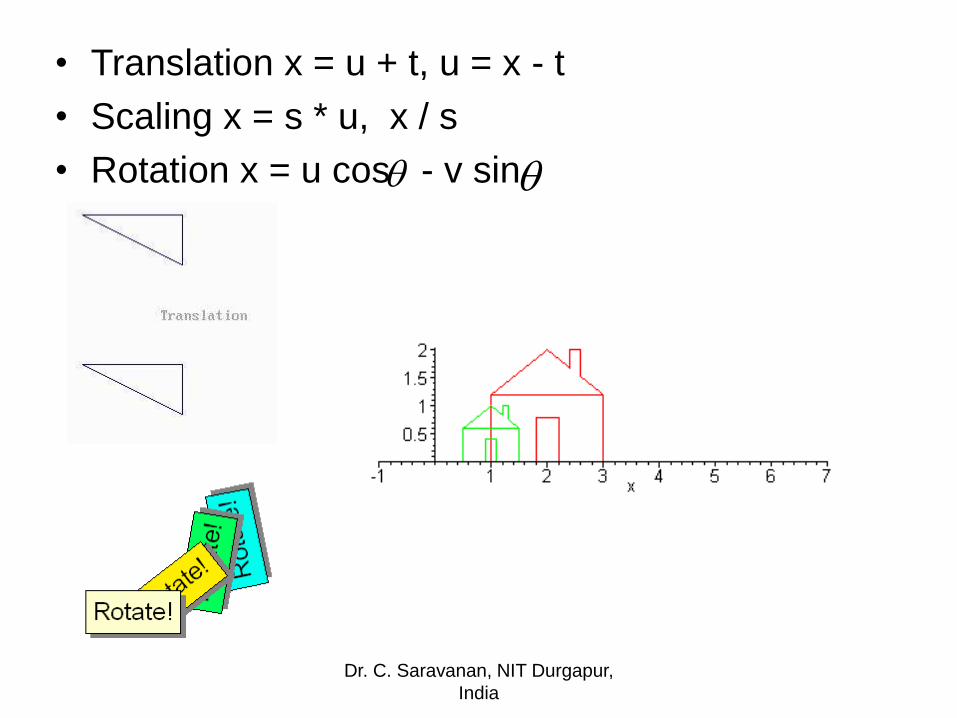
• Translation x = u + t, u = x - t
• Scaling x = s * u, x / s
• Rotation x = u cos - v sin
Dr. C. Saravanan, NIT Durgapur,
India
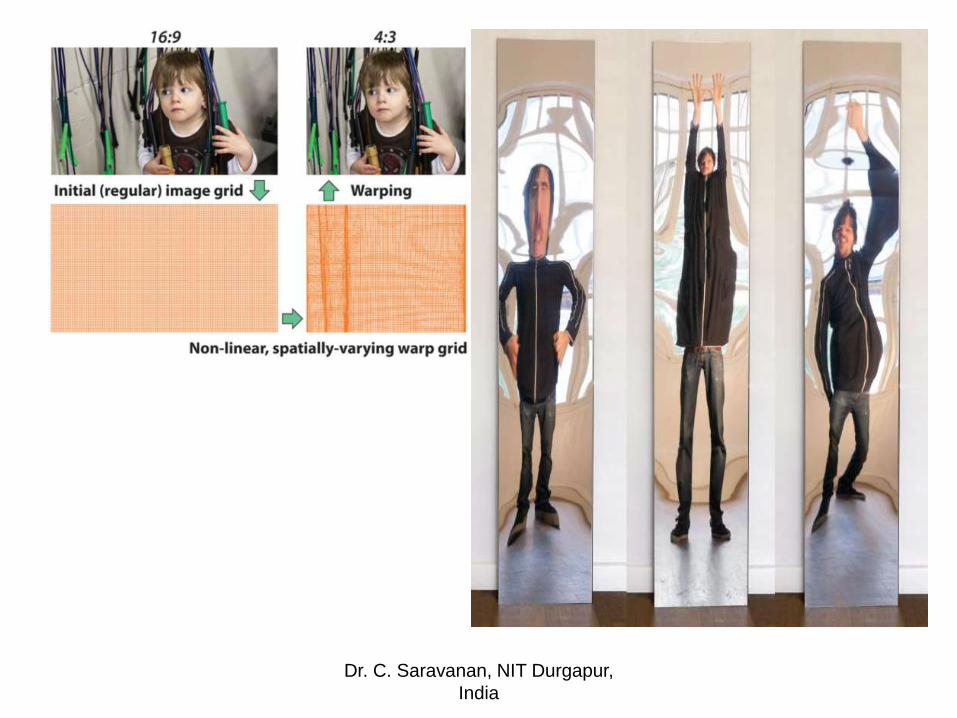
Image Warping
• Warping may be used for correcting image
distortion and for creative purposes.
• Points are mapped to points without
changing the colors.
• Applications - Cartoon Pictures and
Movies.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
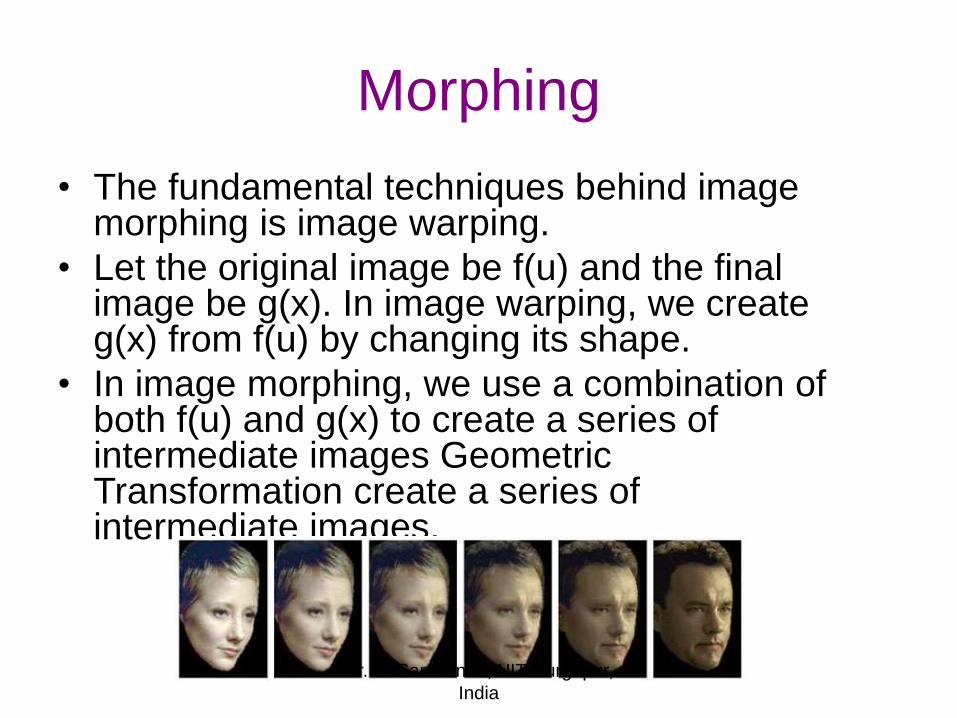
Morphing
• The fundamental techniques behind image morphing is image warping.
• Let the original image be f(u) and the final image be g(x). In image warping, we create g(x) from f(u) by changing its shape.
• In image morphing, we use a combination of both f(u) and g(x) to create a series of intermediate images Geometric Transformation create a series of intermediate images.
Dr. C. Saravanan, NIT Durgapur,
India
Image Restoration
• To remove or reduce the degradations.
• The degradations may be due to
– sensor noise
– blur due to camera misfocus
– relative object-camera motion
– random atmospheric turbulence
– others
Dr. C. Saravanan, NIT Durgapur,
India
Restoration Methods
• Deterministic– work with sample by sample processing
• Stochastic– work with the statistics of the image
• Non-blind– The degradation process is known
• Blind– The degradation process is unknown
• Direct, Iterative, and Recursive (implementation)
Dr. C. Saravanan, NIT Durgapur,
India
Restoration Domain
• Restoration techniques are best in the
spatial domain - scanned old images - not
occured at the time of image acquiring.
• Spatial processing is applicable if the
degradation is additive noise.
• Frequency domain filters too used.
Dr. C. Saravanan, NIT Durgapur,
India
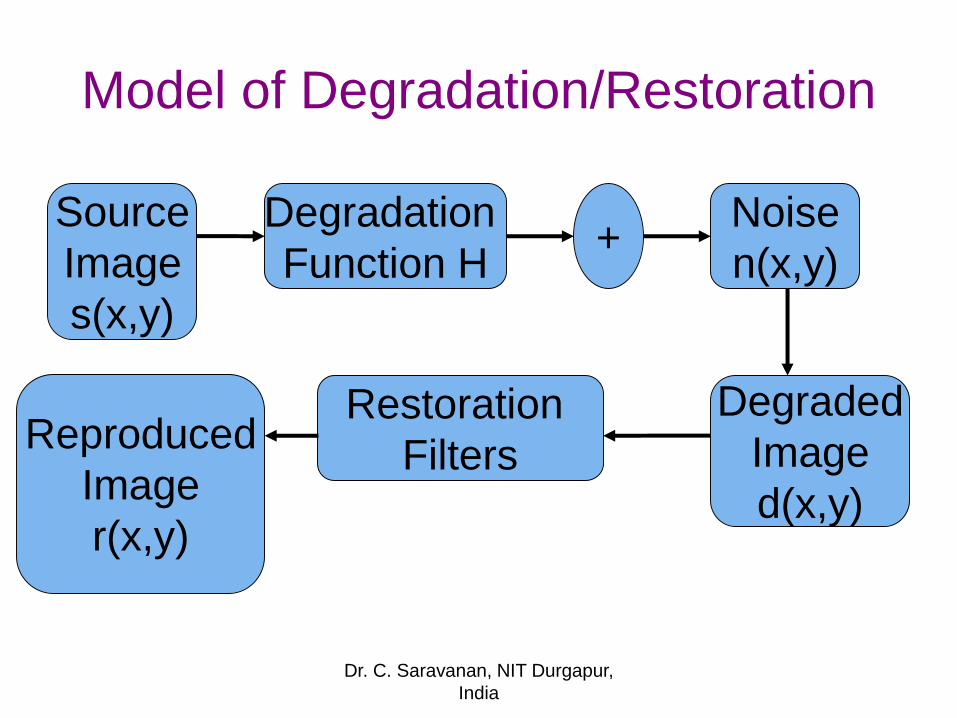
Model of Degradation/Restoration
Source
Image
s(x,y)
Degradation
Function H
Noise
n(x,y)+
Degraded
Image
d(x,y)
Restoration
FiltersReproduced
Image
r(x,y)
Dr. C. Saravanan, NIT Durgapur,
India
Estimation of Restoration
• Objective of restoration is to estimate
r(x,y) using
– Degraded image d(x,y)
– Knowledge of degraded function H
– Knowledge of additive noise n(x,y)
• The estimate should be as close as
possible to the source image s(x,y).
Dr. C. Saravanan, NIT Durgapur,
India
Enhancement Vs. Restoration
• Reconstruction techniques are oriented toward modeling the degradation.
• Applying the inverse process for recovering the original image.
• Restoration - Deblurring - removal of blur.
• Enhancement - Contrast Stretching -improves the visual quality of the image.
• Enhancement is Subjective and Restoration is Objective.
Dr. C. Saravanan, NIT Durgapur,
India
Noise
• Digital image has several different noise sources, some of them fixed, some temporal, some are temperature dependent.
• The noise characteristics of the camera are analyzed by shooting numerous frames both in complete darkness (for dark signal and noise properties) with several exposure times and on different exposure levels with flat field target.
Dr. C. Saravanan, NIT Durgapur,
India
Noise
• Principal source of noise - image acquisition (digitisation) - transmission.
• Performance of imaging sensors are affected by environmental conditions and quality of sensing elements.
• Light levels and sensor temperature -major factors.
• Transmission - Wireless - Atmospheric disturbance - Lightning.
Dr. C. Saravanan, NIT Durgapur,
India
• Based on these measurements, several parameters describing camera’s noise characteristics and sensitivity are calculated.
• These parameters include for example camera gain constant (electrons/output digital number), dark signal nonuniformity, photoresponse nonuniformity and STDs of temporal noise and fixed pattern noise.
Characterisation of Noise
Dr. C. Saravanan, NIT Durgapur,
India
Types of Noise
• Noise components divided into three groups: signal dependent, temperature dependent and time dependent.
• Signal dependent noise components are photon shot noise, photoresponse nonuniformity (PRNU) and amplifier gain non-uniformity.
Dr. C. Saravanan, NIT Durgapur,
India
Classification
• Time dependent noise components include photon shot noise, dark current shot noise, reset noise and thermal noise.
• Random components include photon shot noise, dark current shot noise, reset noise and thermal noise.
• Pattern components are amplifier gain non-uniformity, PRNU, dark current non-uniformity and column amplification offset.
• Quantization noise is caused by discrete output levels of A/D converter.
Dr. C. Saravanan, NIT Durgapur,
India
Noise Types
• Gaussian noise
• Rayleigh noise - skewed histograms.
• Erland (Gamma) noise
• Exponential noise
• Uniform noise
• Impulse (salt-and-pepper) noise– bipolar, shot, spike, are known as S&P noise.
– assumption - impulse noise - extreme values -negative impulse - black - +ve impluse - white.
Dr. C. Saravanan, NIT Durgapur,
India
Shot Noise
• Shot noise results from the discrete nature of electronic charge.
• During Current flows, the electrons will fluctuate slightly and give rise to variation in current flow.
• Both photoelectrons and dark current contribute to shot noise and are referred to as photon shot noise and dark current shot noise respectively.
• Shot noise exhibits a Poisson distribution and has a square root relationship between signal and noise.
• PRNU is signal dependent and multiplicative in nature.
Dr. C. Saravanan, NIT Durgapur,
India
Thermal Noise
• Temperature dependent noise components are thermal noise and dark current.
• Dark current arises through thermal generation of electrons (TGEs) in the silicon. The dark current is usually different from pixel to pixel. The average value of dark current for all pixels might be referred to as the dark current bias.
• If this bias is subtracted from every pixel the variation remaining is referred to as fixed pattern noise (FPN).
• Additionally there is dark current shot noise (shot noise associated with the portion of current that is dark current).
• Dark current can be significantly reduced through cooling of the sensor; the number of TGEs can be halved with every 8-9 °C of cooling.
Dr. C. Saravanan, NIT Durgapur,
India

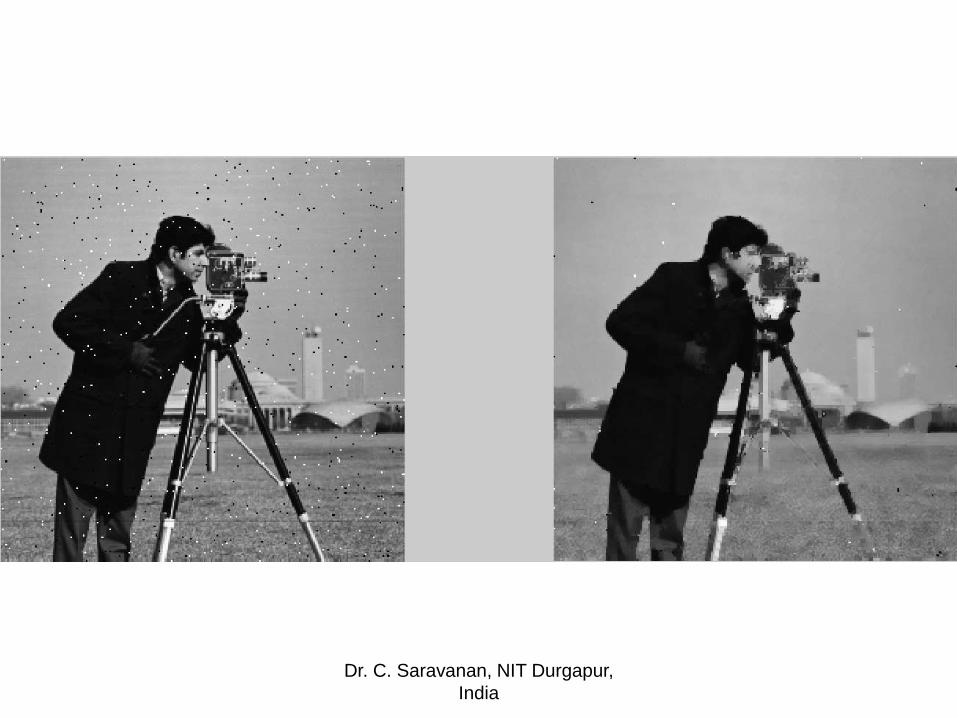
Salt and Pepper Noise
• Also known as Impulse Noise.
• Cause by sharp & sudden disturbance in
the image signal.
• Sparsely occurring white and black pixels.
• Certain amount of the pixels in the image
are either black or white.
• Median Filter
• Morphological Filter
Dr. C. Saravanan, NIT Durgapur,
India
S & P Noise
• Minimum Filtering
– Current pixel replaced by minimum pixel value
• Maximum Filtering
– Current pixel replaced by maximum pixel value
• Mean Filtering
– Current pixel replaced by mean value of neighbour.
• Median Filtering
– Current pixel replaced by mid value of neighbour.
Dr. C. Saravanan, NIT Durgapur,
India

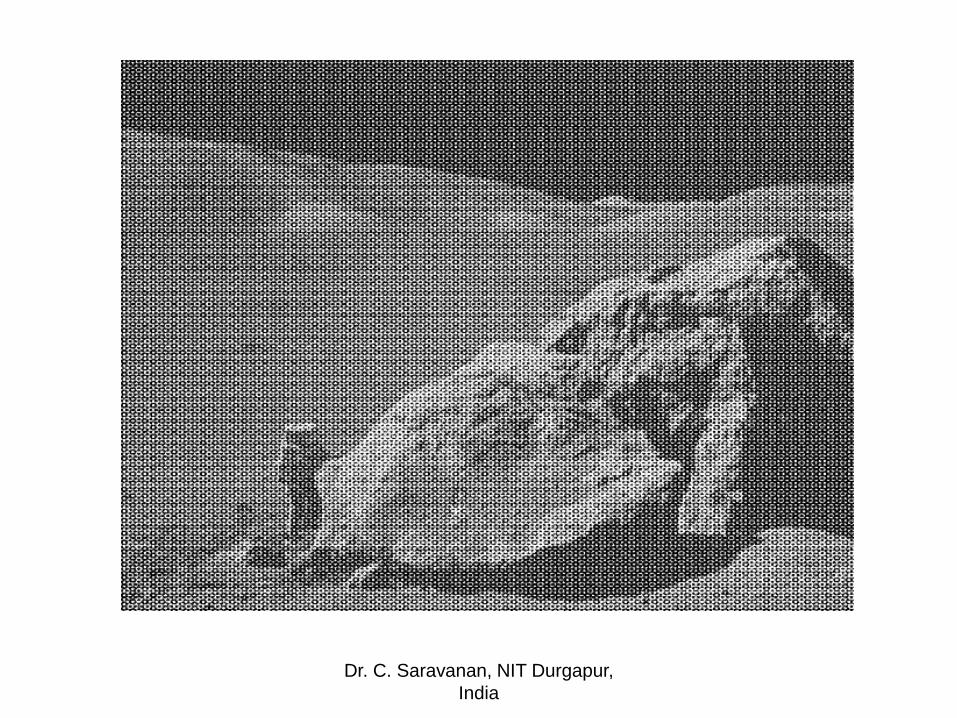
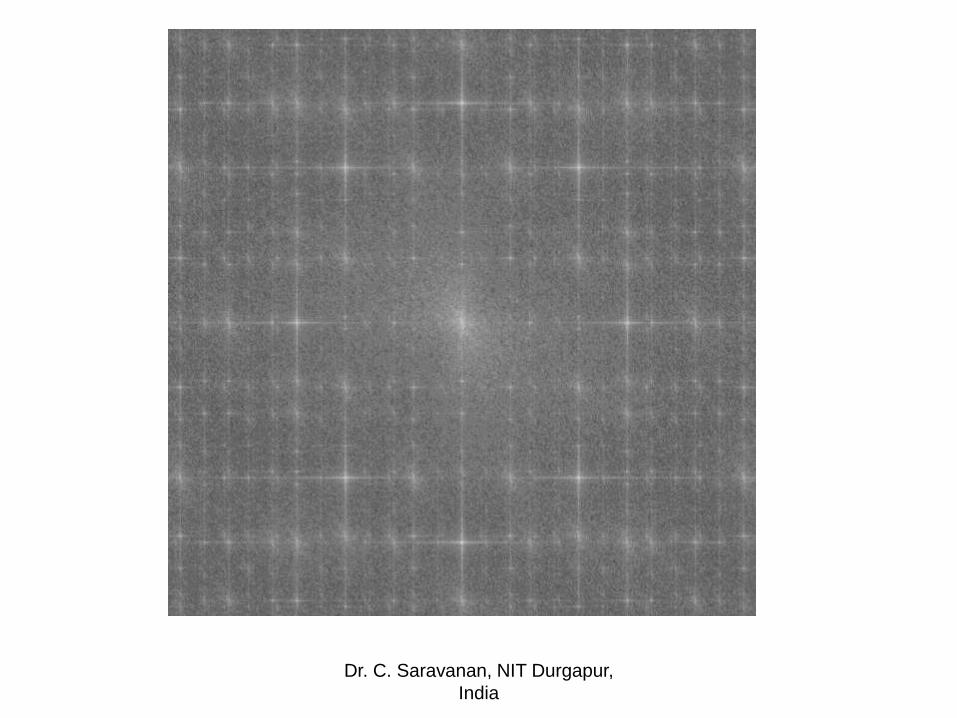
Periodic Noise
• Irises from electrical or electromechanical
interference.
• Spatially dependent noise.
• Reduced using frequency domain filtering.
• Peaks in Fourier Transform.
• Applying a Butterworth band-reject filter
(sets the peaks to zero)
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
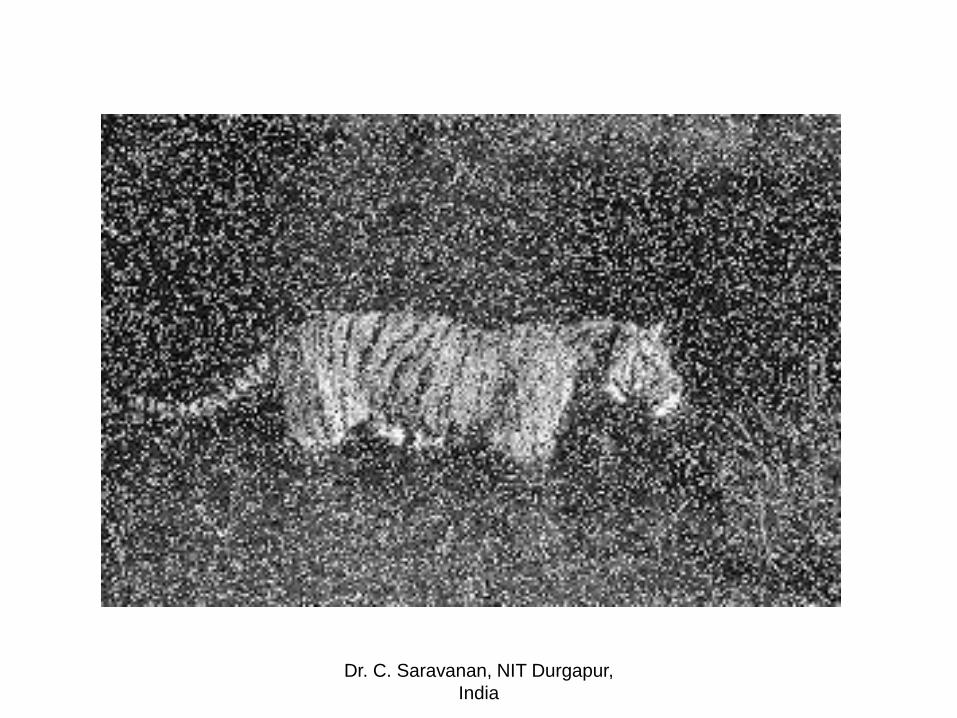
Gaussian Noise
• Karl Friedrich Gauss, an 18th century German physicist
• Is caused by Random fluctuations
• Also called statistical noise
• Gaussian noise in digital images arise during acquisition.
• Sensor noise caused by poor illumination and/or high temperature, and/or transmission e.g. electronic circuit noise
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Estimating Noise Parameters
• Choose an Optical sensor
• Preoare a solid gray board
• Set up an uniform illumination
• Capture set of images
• Resulting images are indicators of system
noise.
Dr. C. Saravanan, NIT Durgapur,
India
Spatial Filtering
• Mean Filter– Arithmetic mean - simple average of m x n.
– Geometric mean - product of pixels - raised to power 1/mn
– Harmonic mean - mn/(sum(1/pixel)) - works well for salt noise - fails for pepper noise.
– Contraharmonic mean - sum(pixel, pow(q+1))/ sum(pixel, pow(q))
– q is order of the filter - +ve values of q eliminates salt noise. if q=0 Arithmetic Mean, q=-1 Harmonic Mean.
Dr. C. Saravanan, NIT Durgapur,
India
Order Statistics Filters
• Median Filter - median of the pixel value in the neighborhood pixels - random, bipolar, unipolar noise - less blurring.
• Max and Min Filter - used to reduce brightest and darkest pixels - S&P noise.
• Midpoint Filter - midpoint between max. and min. pixel values - gaussion noise.
• Alpha-trimmed Mean Filter - delete d/2 lowest and d/2 highest gray level values - filter formed by averaging these remaining pixels.
Dr. C. Saravanan, NIT Durgapur,
India
Adaptive Filters
• Adaptive filters - better performance.
• Adaptive local noise reduction filter– AF based on pixel value, variance, local mean,
local variance
– mean gives a measure of average gray level
– variance gives a measure of average contrast
L
L
myxgyxgyxf ),(),(),(2
2
Dr. C. Saravanan, NIT Durgapur,
India
Adaptive Median Filter
• AMF can handle impulse noise with larger probabilities compared to median filter -preserves details while smoothing.
• sxy is rectangular working area
• zmin = minimum gray level in sxy
• zmax = maximum gray level in sxy
• zmed = median of gray level in sxy
• zxy = gray level at coordinates (x,y)
• smax = maximum allowed size of sxy.
Dr. C. Saravanan, NIT Durgapur,
India
AMF Algorithm
Level A: A1 = zmed - zmin
A2 = zmed - zmax
if A1 > 0 and A2 < 0, Goto Level B
else increase the window size
if window size <= smax repeat level A
else output zxy.
Level B: B1 = zxy - zmin
B2 = zxy - zmax
if B1 > 0 and B2 < 0, output zxy
else output zmed.
Dr. C. Saravanan, NIT Durgapur,
India
Purposes
• The output is single value.
• The algorithm starts from first area location 0,0
• outputs value and
• shifts to the next area
• algorithm reinitializes and applies on the area
• Three main purposes
– removing salt and pepper noise
– provide smoothing
– reduce distortion
Dr. C. Saravanan, NIT Durgapur,
India
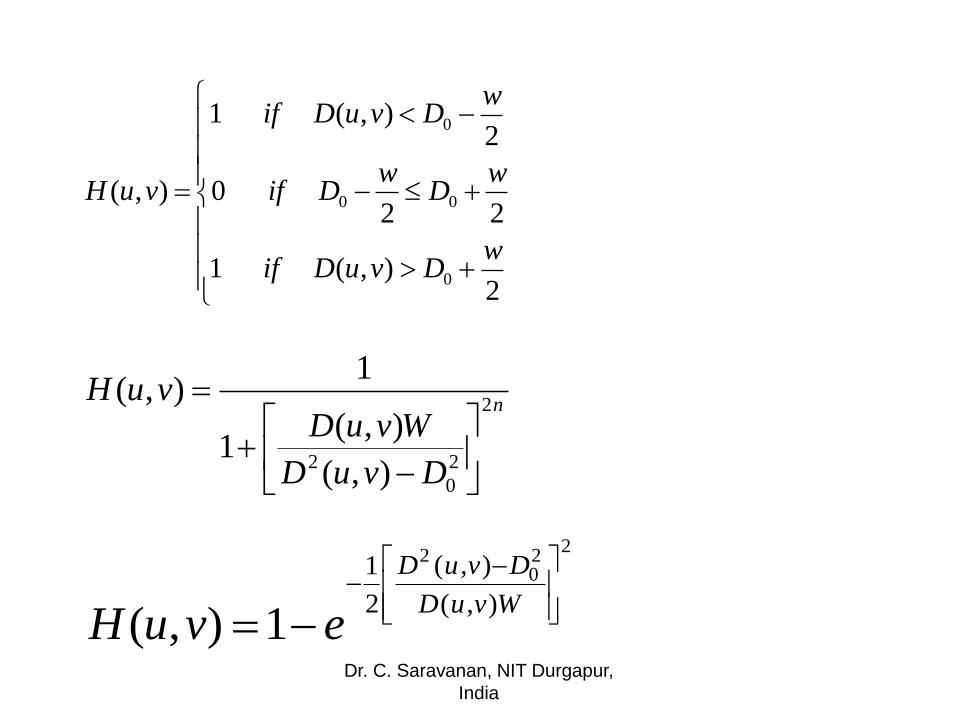
Frequency Domain Filtering
• Bandreject Filters - attenuates those in a
specific range to very low levels -
Butterworth - Gaussian
• Bandpass Filters - attenuates those in a
specific range to very high levels
• Notch Filters - rejects frequencies in
predefined neighborhoods about center
frequency.
Dr. C. Saravanan, NIT Durgapur,
India
2),(1
220
2),(1
),(
0
00
0
wDvuDif
wD
wDif
wDvuDif
vuH
n
DvuD
WvuDvuH
2
2
0
2 ),(
),(1
1),(
220
2
),(
),(
2
1
1),(
WvuD
DvuD
evuHDr. C. Saravanan, NIT Durgapur,
India
• D(u,v) is the distance from the origin of the centered frequency rectangle.
• W is the width of the band.
• Do is its radical centre.
• order 'n' is given by the expression.
• br - bandreject, bp - bandpass
),(1),( vuHvuH brbp
Dr. C. Saravanan, NIT Durgapur,
India
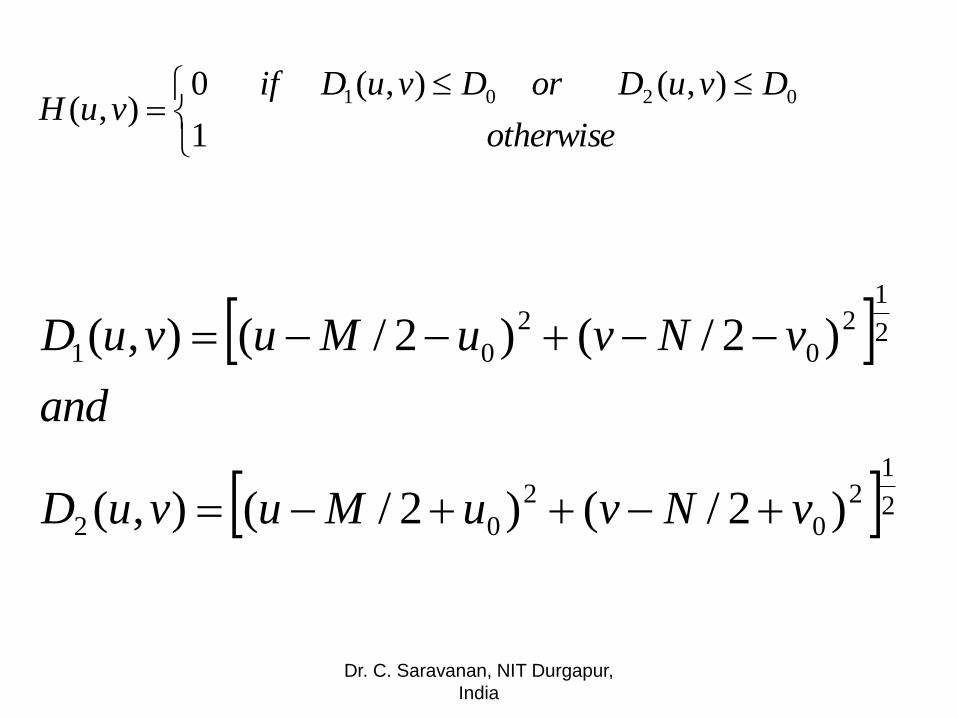
otherwise
DvuDorDvuDifvuH
0201 ),(),(
1
0),(
21
2
0
2
02
2
12
0
2
01
)2/()2/(),(
)2/()2/(),(
vNvuMuvuD
and
vNvuMuvuD
Dr. C. Saravanan, NIT Durgapur,
India
Estimating the Degrading Function
• Observation - degraded image - no knowledge - gather information from the image itself - uniform background regions -strong signal content - estimate the power spectrum or the probability density function - studying the mechanism that caused the degradation.
• Experimentation - equivalent equipment
• Mathematical Modeling
Dr. C. Saravanan, NIT Durgapur,
India
Inverse Filtering
• If we know of or can create a good model of the blurring function that corrupted an image, the quickest and easiest way to restore that is by inverse filtering.
• The inverse filter is a form of high pass filter.
• Noise tends to be high frequency.
• Thresholding and an Iterative method.
Dr. C. Saravanan, NIT Durgapur,
India
Weiner Filtering
• also called Minimum Mean Square Error
Filter or Least Square Error Filter
• its a statistical approach.
• incorporates both the degradation function
and statistical characteristics of noise.
• noise and image are uncorrelated.
Dr. C. Saravanan, NIT Durgapur,
India
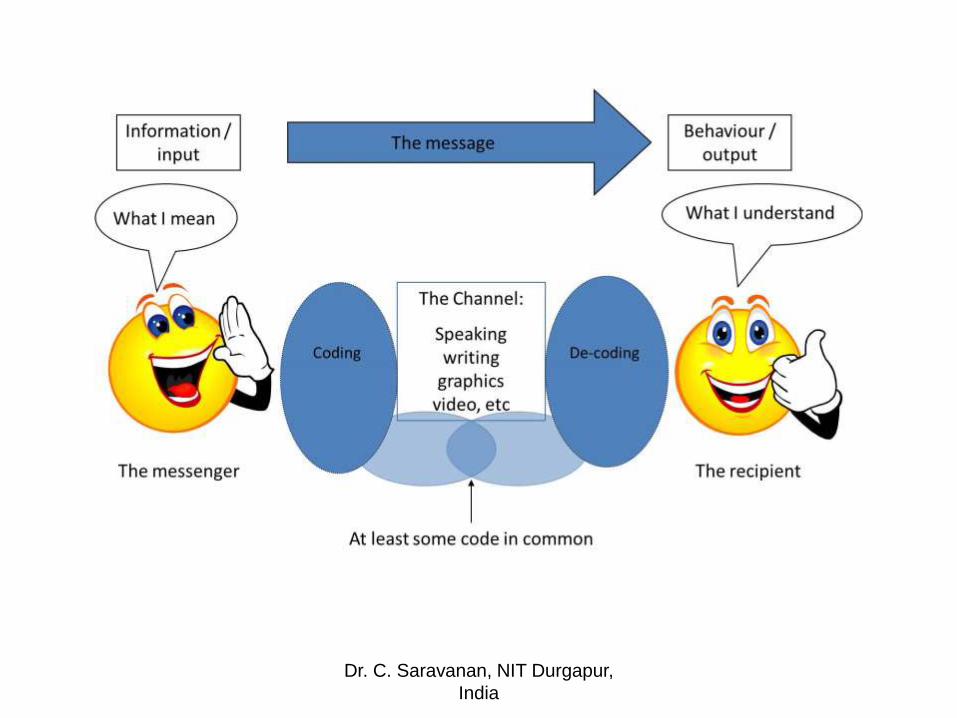
Encoder and Decoder Model
• The Encoding/decoding model of
communication was first developed by
cultural studies scholar Stuart Hall in 1973,
titled 'Encoding and Decoding in the
Television Discourse,'
• Hall's essay offers a theoretical approach
of how media messages are produced,
disseminated, and interpreted.
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Three different positions
• For example, advertisements can have
multiple layers of meaning, they can be
decoded in various ways and can mean
something different to different people.
• Decoding subject can assume three
different positions: Dominant/hegemonic
position, negotiated position, and
oppositional position.
Dr. C. Saravanan, NIT Durgapur,
India
Four-stage model
• Production – This is where the encoding of a
message takes place.
• Circulation – How individuals perceive things:
visual vs. written.
• Use (distribution or consumption) – This is the
decoding/interpreting of a message which
requires active recipients.
• Reproduction – This is the stage after audience
members have interpreted the message in their
own way based on their experiences and beliefs.Dr. C. Saravanan, NIT Durgapur,
India
Dominant/hegemonic position
• This position is one where the consumer takes
the actual meaning directly, and decodes it
exactly the way it was encoded.
• The consumer is located within the dominant
point of view, and is fully sharing the texts codes
and accepts and reproduces the intended
meaning.
• Here, there is barely any misunderstanding
because both the sender and receiver have the
same cultural biases.
Dr. C. Saravanan, NIT Durgapur,
India
Negotiated position
• This position is a mixture of accepting and
rejecting elements.
• Readers are acknowledging the dominant
message, but are not willing to completely
accept it the way the encoder has
intended.
• The reader to a certain extent shares the
texts code and generally accepts the
preferred meaningDr. C. Saravanan, NIT Durgapur,
India
Oppositional position
• In this position a consumer understands
the literal meaning, but due to different
backgrounds each individual has their own
way of decoding messages, while forming
their own interpretations.
• The readers' social situation has placed
them in a directly oppositional relation to
the dominant code.
Dr. C. Saravanan, NIT Durgapur,
India
Types of Redundancies
• Psycho-visual Redundancy
– corresponding to eliminating less relative
important information in a visual object.
• Inter-pixel Redundancy
– corresponding to statistical dependencies
among pixels (neighbouring).
• Coding Redundancy
– Fixed length code - variable length code
(Huffman coding and arithmetic coding).
Dr. C. Saravanan, NIT Durgapur,
India
REDUNDANT DATA
INFORMATION
Dr. C. Saravanan, NIT Durgapur,
India
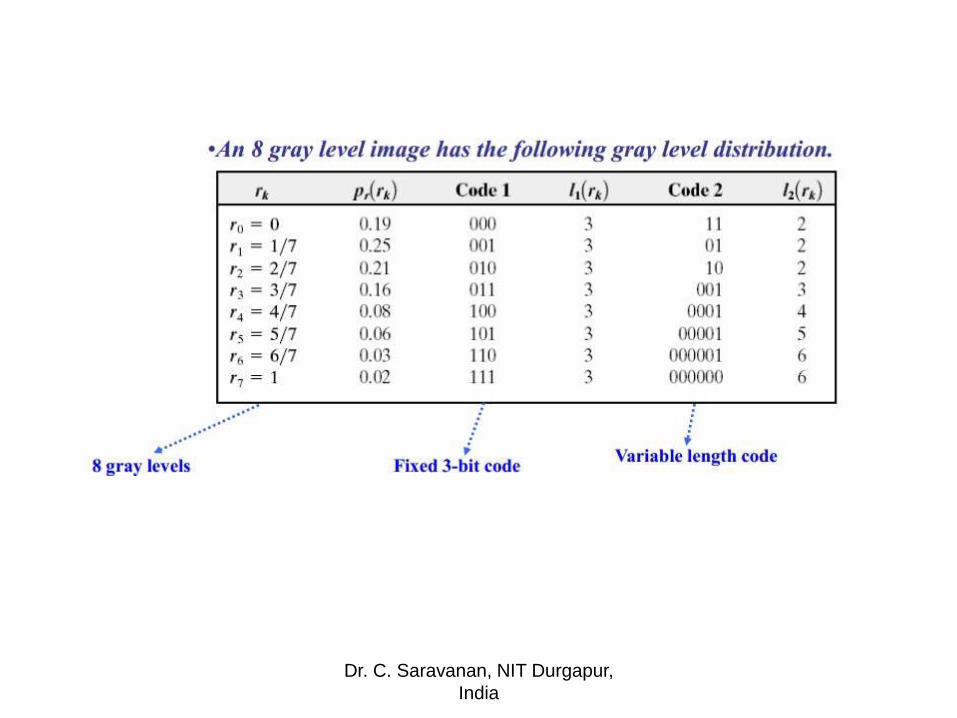
Coding Redundancy
• A code is a system of symbols (i.e. bytes,
bits) that represents information.
• Each piece of information is represented
by a set of code symbols.
• The gray level histogram of an image can
be used in construction of codes to reduce
the data used to represent it.
Dr. C. Saravanan, NIT Durgapur,
India
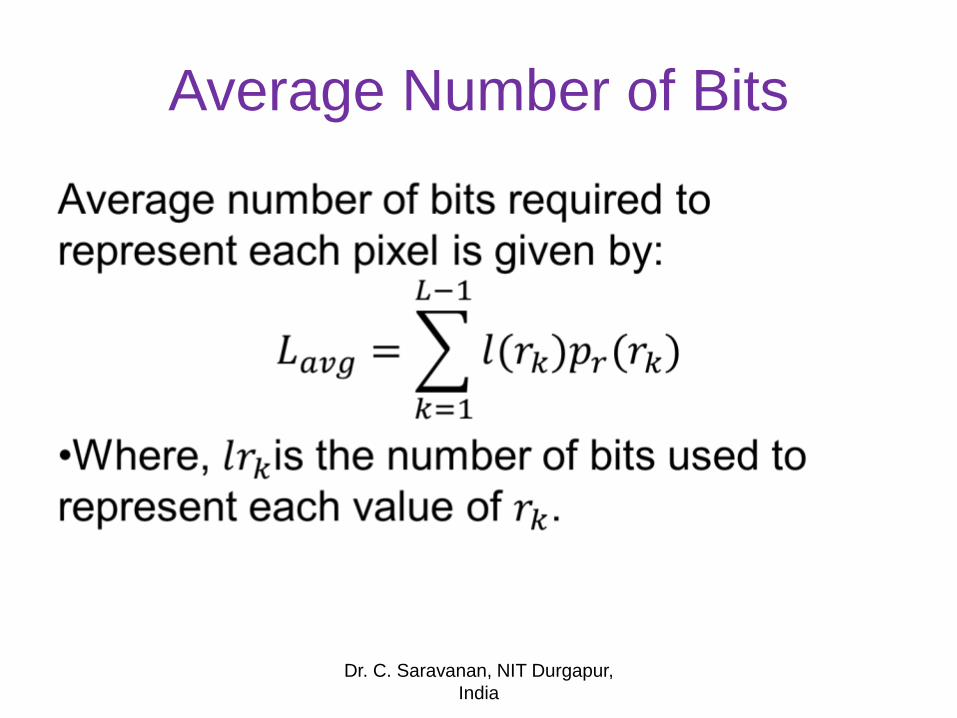
Average Number of Bits
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
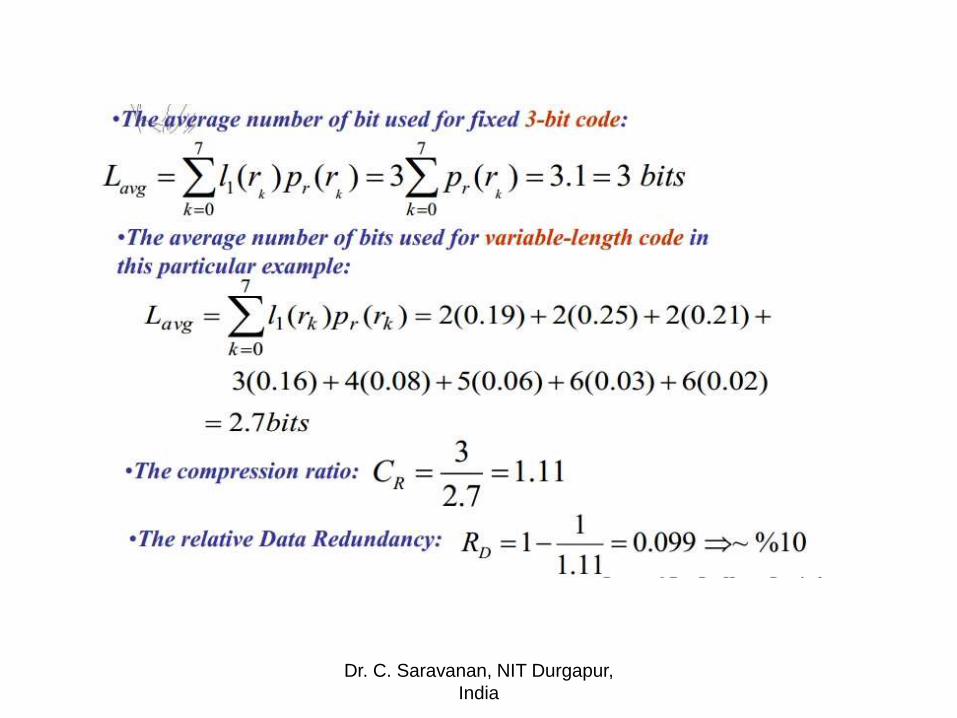
• The shortest code words are assigned to
the most frequent (high probability) gray
levels.
• The longest code words are assigned to
the least frequent (low probability) gray
levels.
• Data compression is achieved by
assigning fewer bits to more probable gray
levels than the less probable gray levels.Dr. C. Saravanan, NIT Durgapur,
India
Interpixel Redundancy
• This type of redundancy is related with the
interpixel correlations within an image.
• Much of the visual contribution of a single
pixel is redundant and can be guessed
from the values of its neighbours.
• Assume a line is represented in an binary
image,
– The line is represented 000000… could be
represented as (0,n). Run Length CodingDr. C. Saravanan, NIT Durgapur,
India
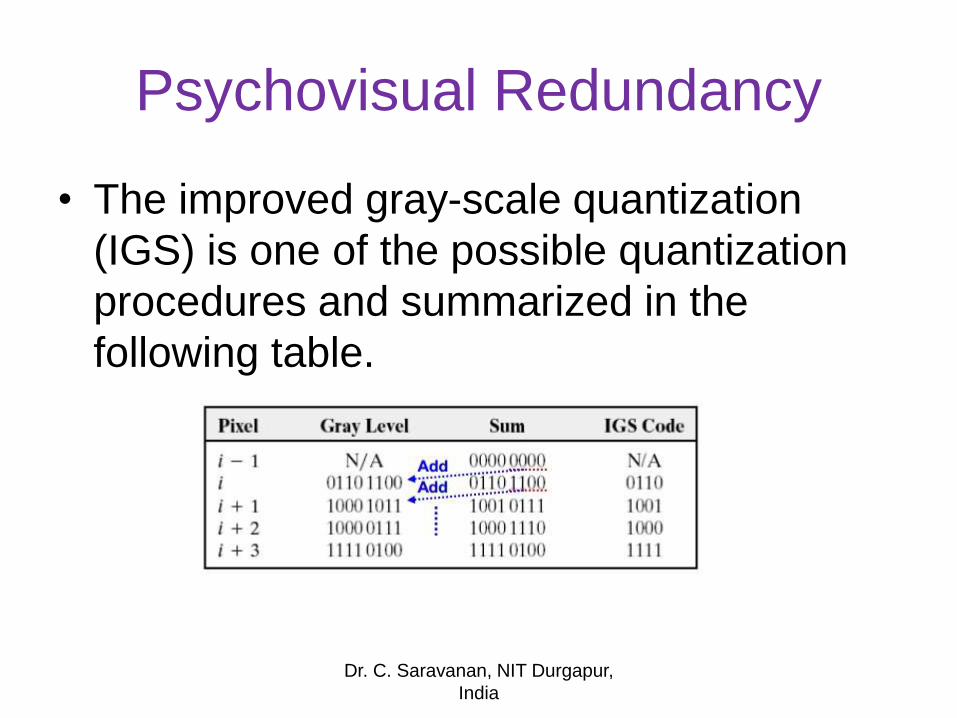
Psychovisual Redundancy
• The improved gray-scale quantization
(IGS) is one of the possible quantization
procedures and summarized in the
following table.
Dr. C. Saravanan, NIT Durgapur,
India
IGS Quantization Procedure
• Add the Least Significant Nibble (4 bits) of
the previous sum to the current 8-bit pixel
value.
• If the MSN of a given 8-bit pixel is 1111
then add zero instead.
• Declare the Most Significant Nibble of the
sum to be the 4-bit IGS code.
Dr. C. Saravanan, NIT Durgapur,
India
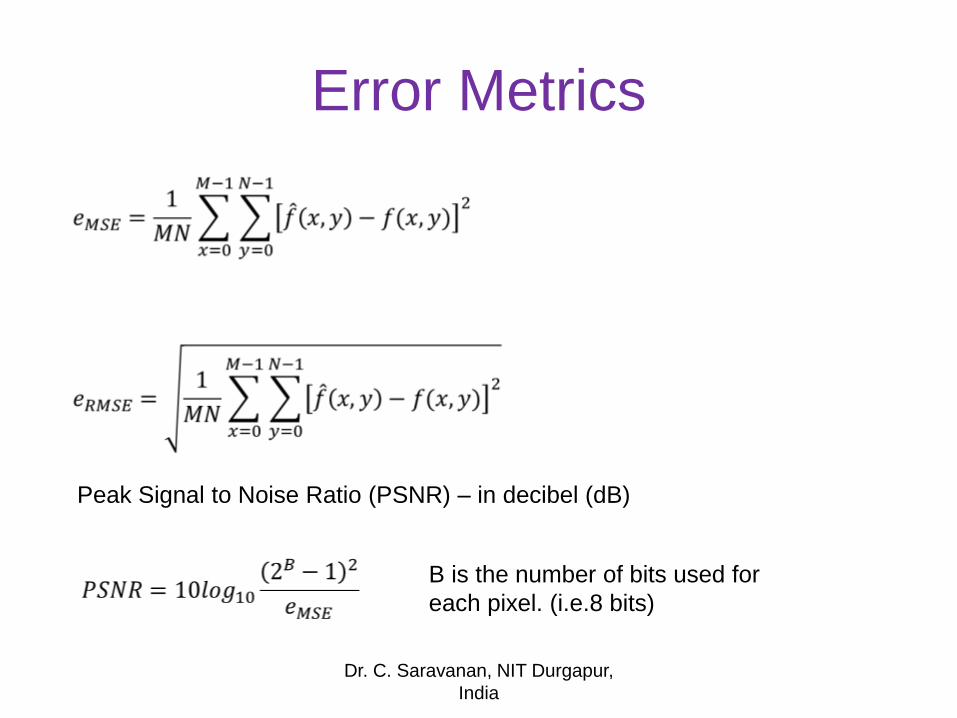
Error Metrics
B is the number of bits used for
each pixel. (i.e.8 bits)
Peak Signal to Noise Ratio (PSNR) – in decibel (dB)
Dr. C. Saravanan, NIT Durgapur,
India
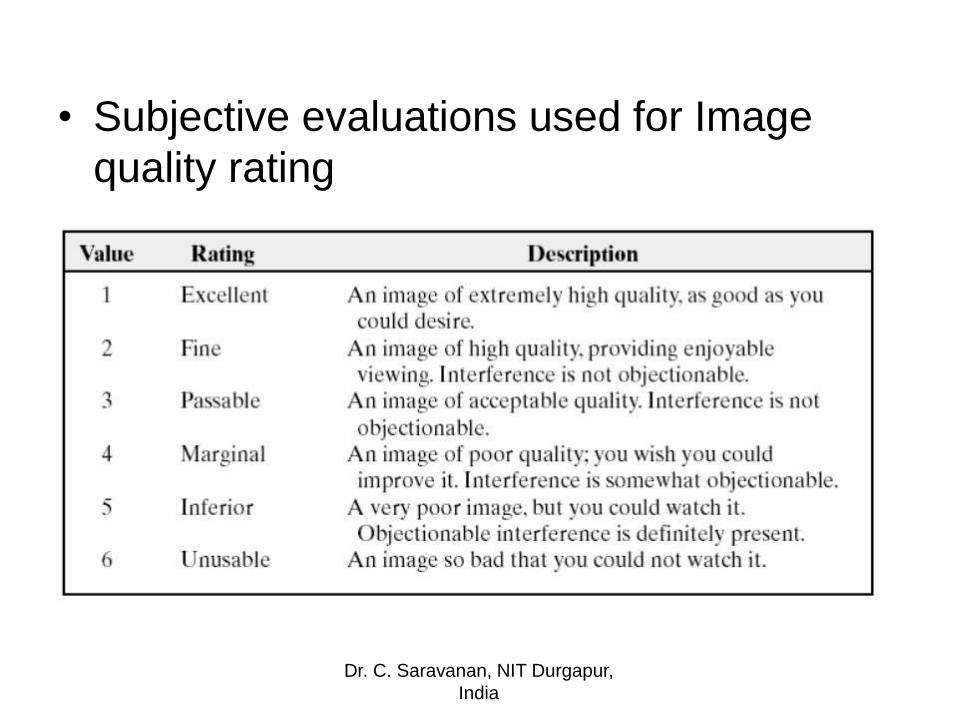
• Subjective evaluations used for Image
quality rating
Dr. C. Saravanan, NIT Durgapur,
India
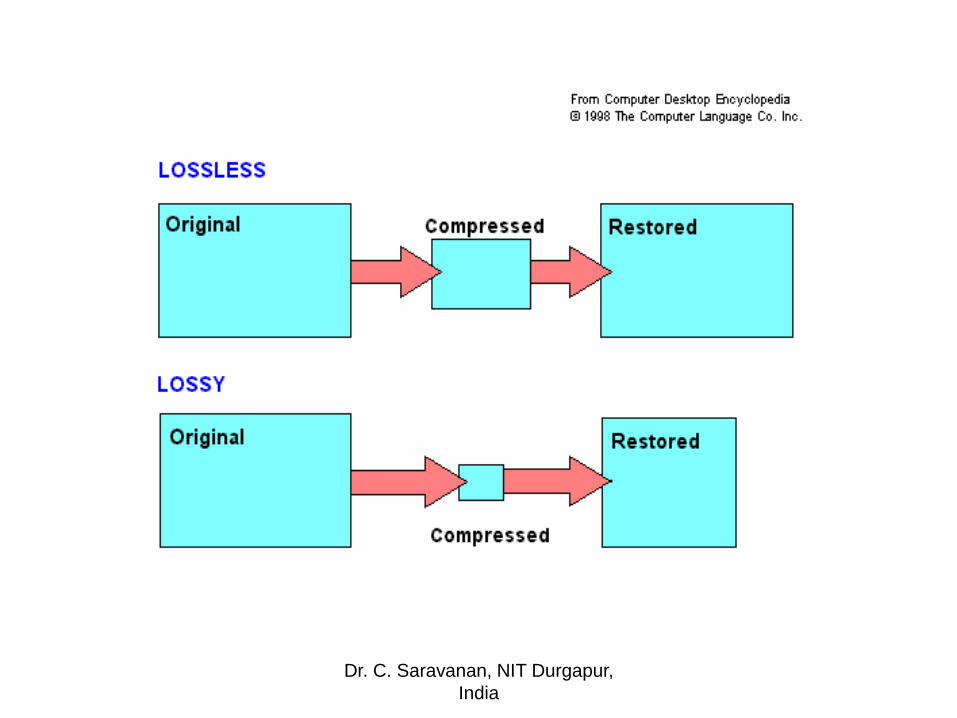
Lossy Compression
• "Lossy" compression is the class of data encoding methods that uses inexact approximations (or partial data discarding) for representing the content that has been encoded.
• Lossy compression technologies attempt to eliminate redundant or unnecessary information.
• Most video and audio compression technologies use a lossy technique.
• Compromise in the accuracy of the reconstructed image - distortion to a level of acceptance
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Lossy Predictive Coding
• Local, Global, Adaptive methods
• Encoder
• Decoder
• Predictor
– pixel value sent to the predictor
– based on past inputs a output value is
predicted
– the predicted value is converted to integer
Dr. C. Saravanan, NIT Durgapur,
India
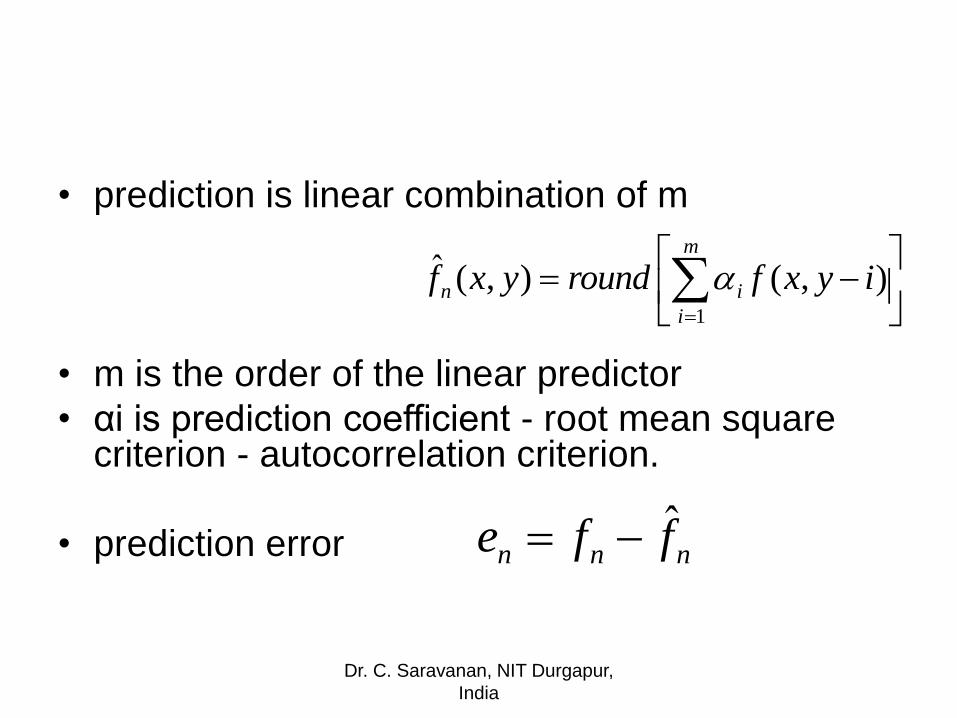
nnn ffe ˆ
m
i
in iyxfroundyxf1
),(),(ˆ
• prediction is linear combination of m
• m is the order of the linear predictor
• αi is prediction coefficient - root mean square criterion - autocorrelation criterion.
• prediction error
Dr. C. Saravanan, NIT Durgapur,
India
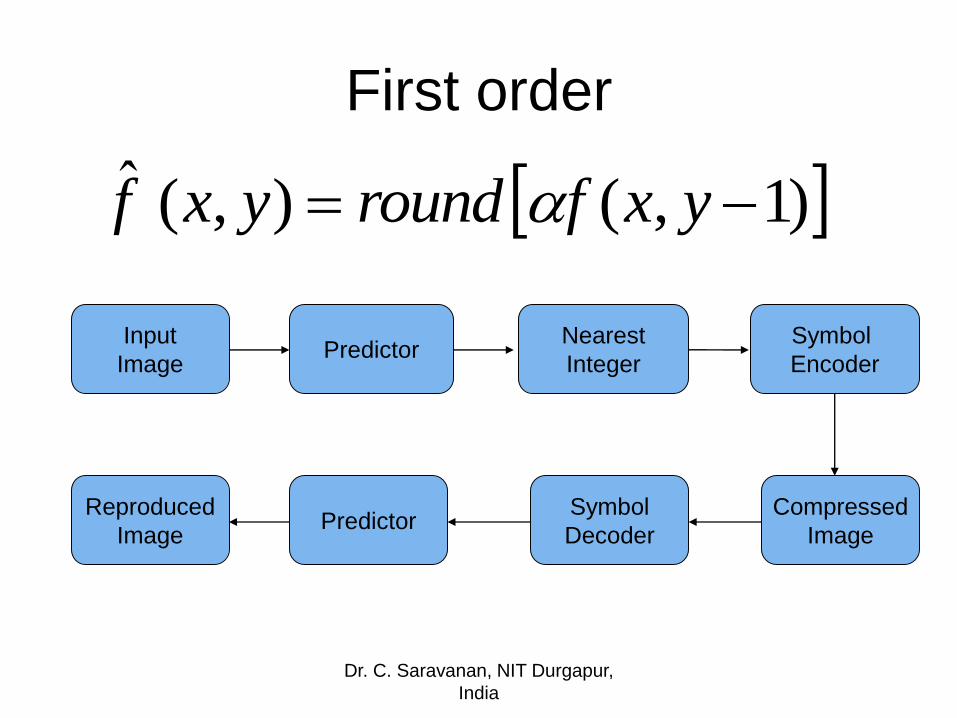
First order
)1,(),(ˆ yxfroundyxf
Input
ImagePredictor
Nearest
Integer
Symbol
Encoder
Compressed
Image
Symbol
DecoderPredictor
Reproduced
Image
Dr. C. Saravanan, NIT Durgapur,
India
Transform Coding
• Reversible, Linear transform such as Fourier Transform is used.
• Transform coding is used to convert spatial image pixel values to transform coefficient values.
• Since this is a linear process and no information is lost, the number of coefficients produced is equal to the number of pixels transformed.
Dr. C. Saravanan, NIT Durgapur,
India
• The desired effect is that most of the
energy in the image will be contained in a
few large transform coefficients.
• If it is generally the same few coefficients
that contain most of the energy in most
pictures, then the coefficients may be
further coded by lossless entropy coding.
Dr. C. Saravanan, NIT Durgapur,
India
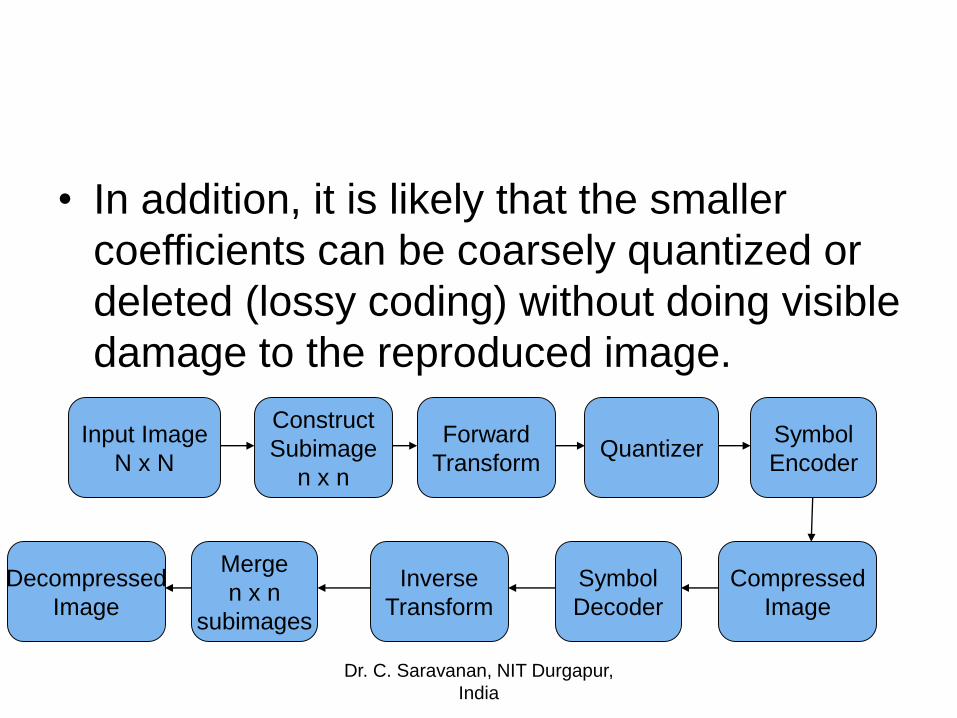
• In addition, it is likely that the smaller
coefficients can be coarsely quantized or
deleted (lossy coding) without doing visible
damage to the reproduced image.
Input Image
N x N
Forward
TransformQuantizer
Symbol
Encoder
Construct
Subimage
n x n
Compressed
Image
Inverse
Transform
Symbol
Decoder
Merge
n x n
subimages
Decompressed
Image
Dr. C. Saravanan, NIT Durgapur,
India
• Fourier Transform
• Karhonen-Loeve Transform (KLT)
• Walsh-Hadamard Transform
• Lapped orthogonal Transform
• Discrete Cosine Transform (DCT)
• Wavelets Transform
Dr. C. Saravanan, NIT Durgapur,
India
LZW coding
• Lempel-Ziv-Welch, 1978, 1984
• assigns fixed length code words to
variable length sequences of source
symbols.
• no priori knowledge of the probability of
source symbols
• GIF, PDF, TIFF
Dr. C. Saravanan, NIT Durgapur,
India
• Codebook / dictionary is constructed
• Encoder: As the input is processed
develop a dictionary and transmit the
index of strings found in the dictionary.
• Decoder: As the code is processed
reconstruct the dictionary to invert the
process of encoding
Dr. C. Saravanan, NIT Durgapur,
India
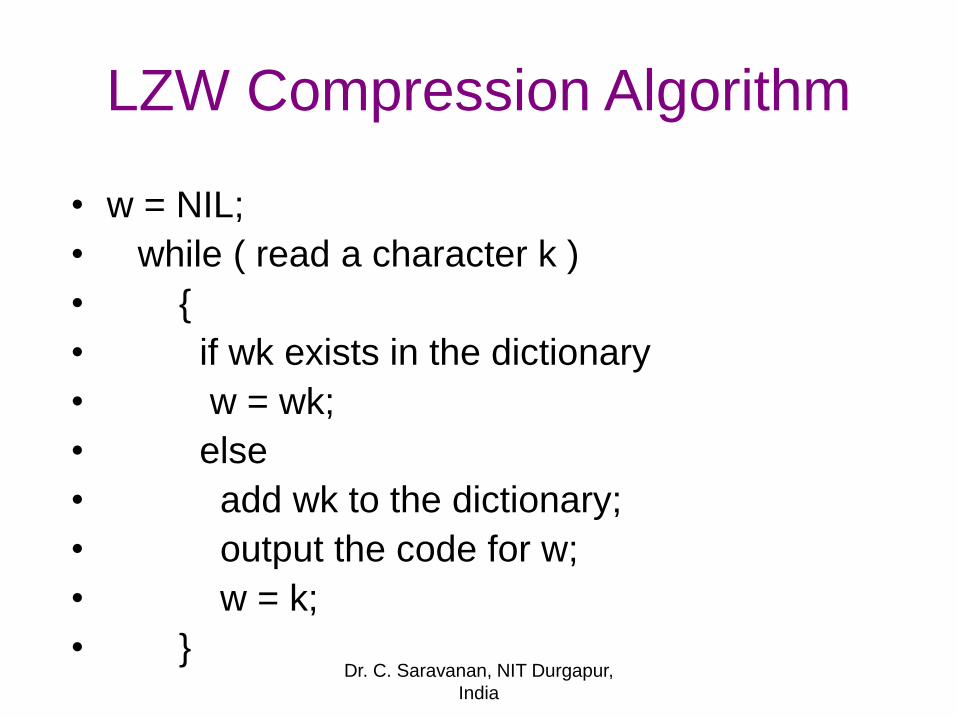
LZW Compression Algorithm
• w = NIL;
• while ( read a character k )
• {
• if wk exists in the dictionary
• w = wk;
• else
• add wk to the dictionary;
• output the code for w;
• w = k;
• }Dr. C. Saravanan, NIT Durgapur,
India
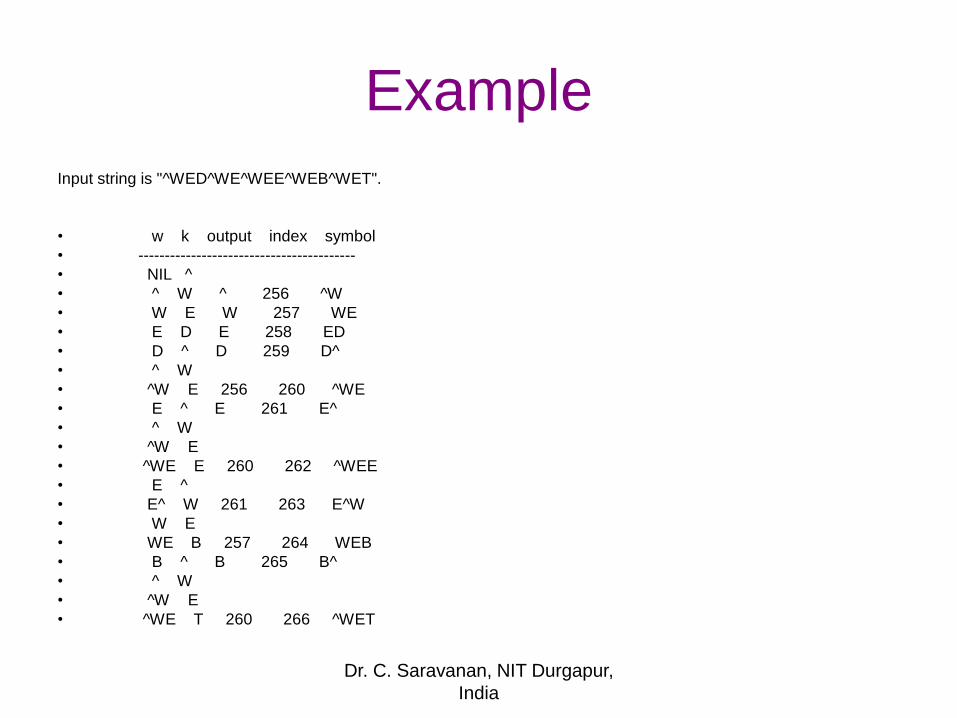
Example
Input string is "^WED^WE^WEE^WEB^WET".
• w k output index symbol
• -----------------------------------------
• NIL ^
• ^ W ^ 256 ^W
• W E W 257 WE
• E D E 258 ED
• D ^ D 259 D^
• ^ W
• ^W E 256 260 ^WE
• E ^ E 261 E^
• ^ W
• ^W E
• ^WE E 260 262 ^WEE
• E ^
• E^ W 261 263 E^W
• W E
• WE B 257 264 WEB
• B ^ B 265 B^
• ^ W
• ^W E
• ^WE T 260 266 ^WET
Dr. C. Saravanan, NIT Durgapur,
India
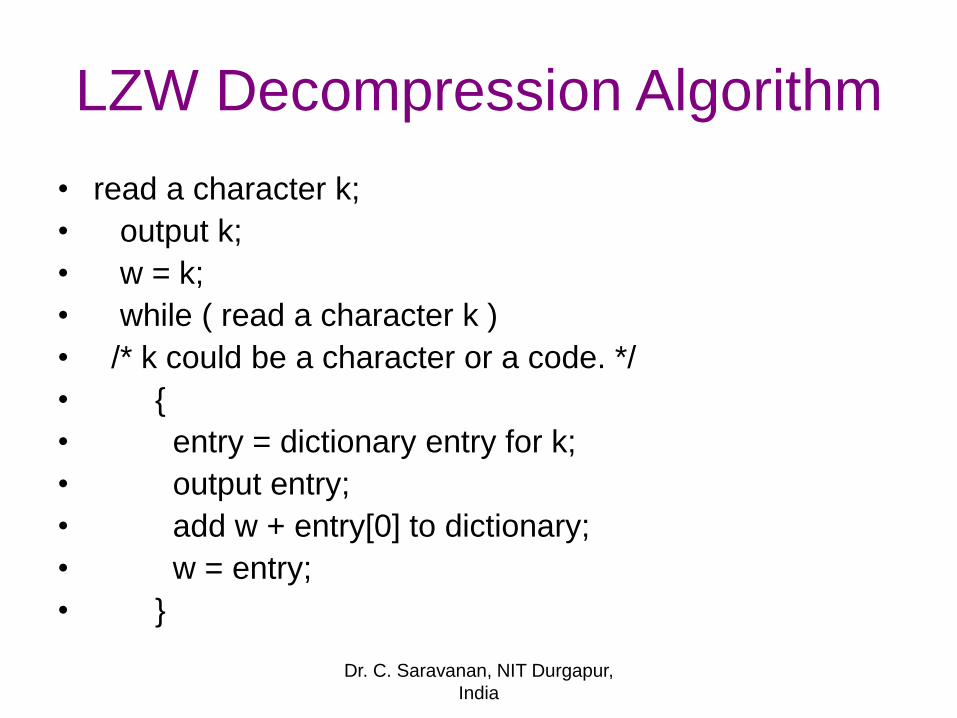
LZW Decompression Algorithm
• read a character k;
• output k;
• w = k;
• while ( read a character k )
• /* k could be a character or a code. */
• {
• entry = dictionary entry for k;
• output entry;
• add w + entry[0] to dictionary;
• w = entry;
• }
Dr. C. Saravanan, NIT Durgapur,
India
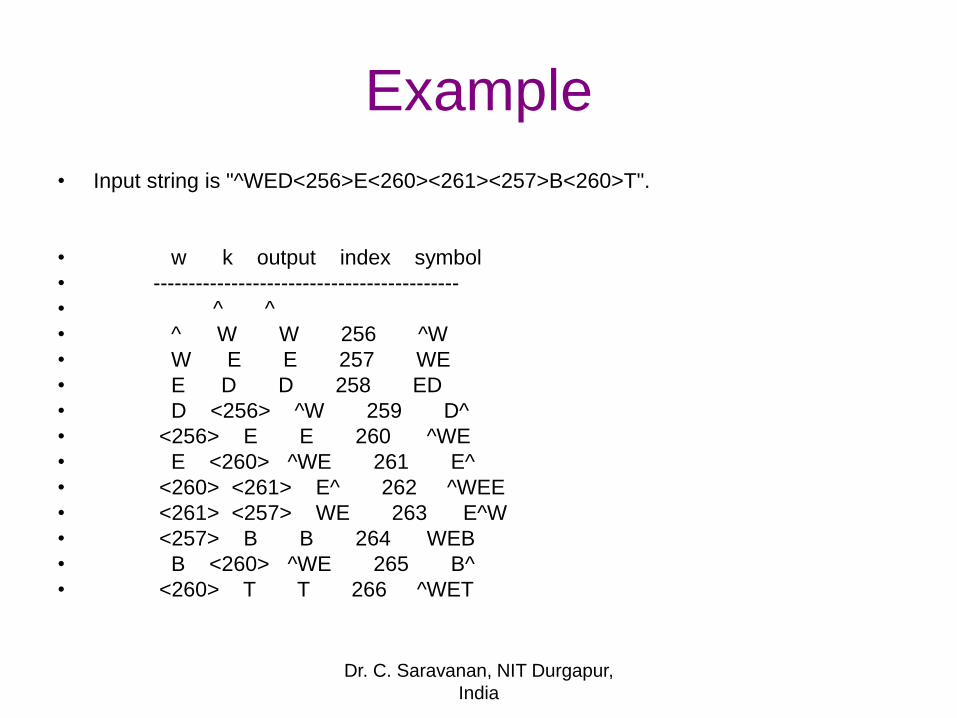
Example
• Input string is "^WED<256>E<260><261><257>B<260>T".
• w k output index symbol
• -------------------------------------------
• ^ ^
• ^ W W 256 ^W
• W E E 257 WE
• E D D 258 ED
• D <256> ^W 259 D^
• <256> E E 260 ^WE
• E <260> ^WE 261 E^
• <260> <261> E^ 262 ^WEE
• <261> <257> WE 263 E^W
• <257> B B 264 WEB
• B <260> ^WE 265 B^
• <260> T T 266 ^WET
Dr. C. Saravanan, NIT Durgapur,
India
Problems
• Too many bits,
• everyone needs a dictionary,
• dictionary space
• Creates entries in the dictionary that may
never be used.
Dr. C. Saravanan, NIT Durgapur,
India
Run Length Coding
• Stored as a single data value and count,
rather than as the original run
• Simple graphic images such as icons, line
drawings, and animations
B BBB BB
12W1B12W3B24W2B14W
Dr. C. Saravanan, NIT Durgapur,
India
Example
• consider a screen containing plain
black text on a solid white
background
• There will be many long runs of white
pixels in the blank space, and many
short runs of black pixels within the
text.
Dr. C. Saravanan, NIT Durgapur,
India
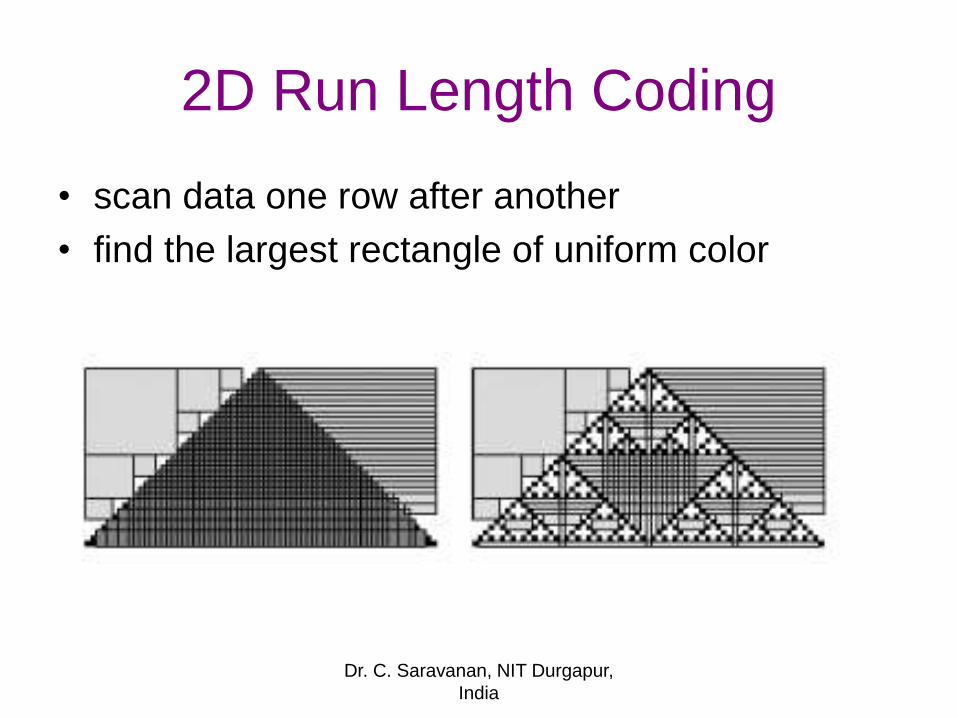
2D Run Length Coding
• scan data one row after another
• find the largest rectangle of uniform color
Dr. C. Saravanan, NIT Durgapur,
India
Procedure
• Make a duplicate image matrix
• quantize the colour levels
– reduce the colour levels
– from 256 to 128 / 64 / 32 / 16
– depends on the application reduction level is maintained
– uniform colour level regions are identified
– different colour level regions are labeled and mapped
Dr. C. Saravanan, NIT Durgapur,
India
Applications
• Texture Analysis
• Compression
• Segmentation
• Medical Image Analysis
• Layout Analysis
• Text finding, word / line spacings
Dr. C. Saravanan, NIT Durgapur,
India
Burrows-Wheeler-Transformation
(BWT)
• The BWT is named after Michael Burrows
and David J. Wheeler, who had published
this procedure in their article "A Block-
sorting Lossless Data Compression
Algorithm" in 1994.
• The fundamental algorithm had been
developed by David J. Wheeler in 1983.
Dr. C. Saravanan, NIT Durgapur,
India
Principle of the algorithm
• A block of original data will be converted
into a certain form and will be sorted
afterwards.
• The result is a sequence of ordered data
that reflect frequently appearing symbol
combinations by repetitions.
Dr. C. Saravanan, NIT Durgapur,
India
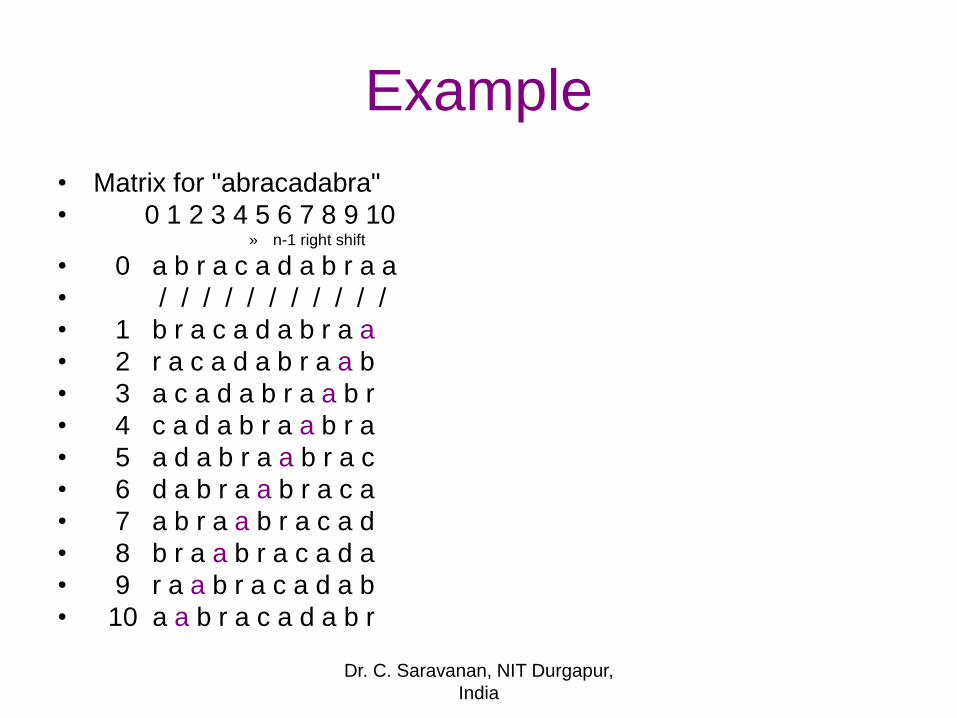
Example
• Matrix for "abracadabra"
• 0 1 2 3 4 5 6 7 8 9 10» n-1 right shift
• 0 a b r a c a d a b r a a
• / / / / / / / / / / /
• 1 b r a c a d a b r a a
• 2 r a c a d a b r a a b
• 3 a c a d a b r a a b r
• 4 c a d a b r a a b r a
• 5 a d a b r a a b r a c
• 6 d a b r a a b r a c a
• 7 a b r a a b r a c a d
• 8 b r a a b r a c a d a
• 9 r a a b r a c a d a b
• 10 a a b r a c a d a b r
Dr. C. Saravanan, NIT Durgapur,
India
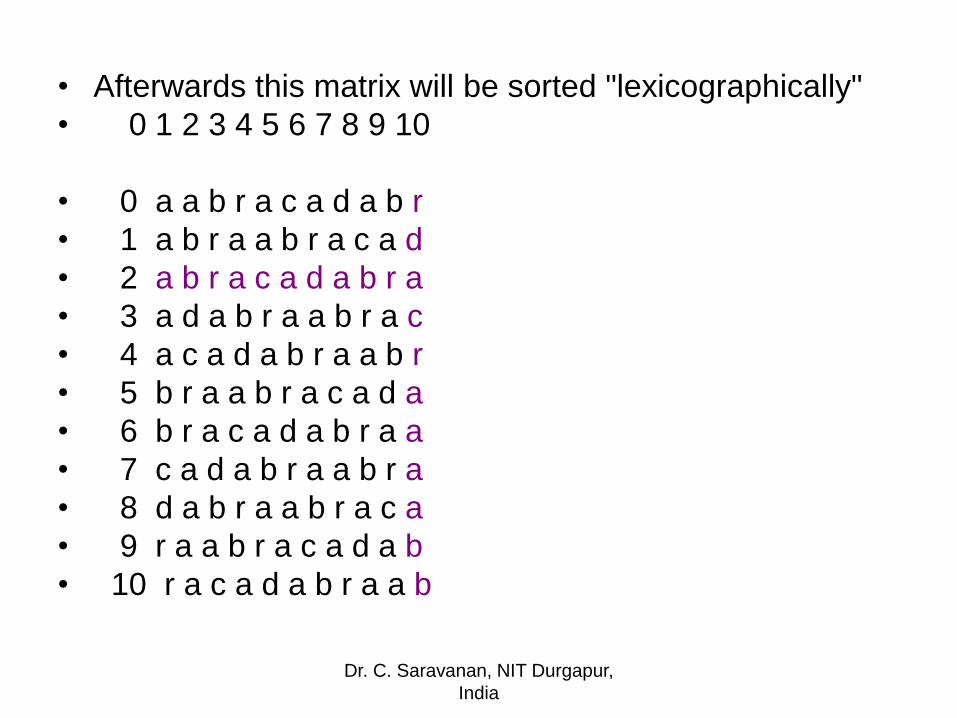
• Afterwards this matrix will be sorted "lexicographically"
• 0 1 2 3 4 5 6 7 8 9 10
• 0 a a b r a c a d a b r
• 1 a b r a a b r a c a d
• 2 a b r a c a d a b r a
• 3 a d a b r a a b r a c
• 4 a c a d a b r a a b r
• 5 b r a a b r a c a d a
• 6 b r a c a d a b r a a
• 7 c a d a b r a a b r a
• 8 d a b r a a b r a c a
• 9 r a a b r a c a d a b
• 10 r a c a d a b r a a b
Dr. C. Saravanan, NIT Durgapur,
India
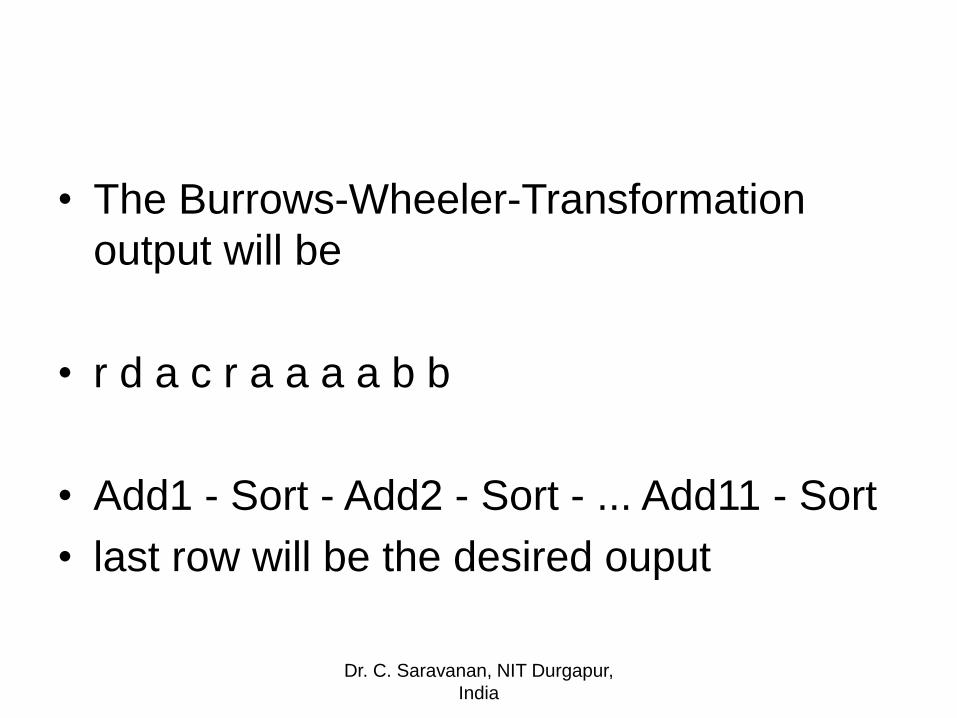
• The Burrows-Wheeler-Transformation
output will be
• r d a c r a a a a b b
• Add1 - Sort - Add2 - Sort - ... Add11 - Sort
• last row will be the desired ouput
Dr. C. Saravanan, NIT Durgapur,
India
• BWT is a transformation algorithm
• BWT transforms a set of symbols to a
large blocks
• the transformed large blocks will have
longer runs of identical symbols
• compression rate will be higher
• BWT implemented using pointer
Dr. C. Saravanan, NIT Durgapur,
India
Entropy Coding
• Entropy - smallest number of bits needed,
on the average, to represent a symbol
• creates and assigns a unique prefix-free
code to each unique symbol that occurs in
the input.
• compress data by replacing each fixed-
length input symbol with the corresponding
variable-length prefix-free output
codewordDr. C. Saravanan, NIT Durgapur,
India
Entropy Coding Techniques
i
iin ppppH 21 log)...(
• Huffman coding
• Arithmetic coding
• Lempel-Ziv coding
• Entropy of a set of elements e1,…,en
with probabilities p1,…,pn is:
Dr. C. Saravanan, NIT Durgapur,
India
• Entropy of e1,…en is maximized when
• 2k symbols may be represented by k bits
• Entropy of p1,…pn is minimized when
0),...,(0...,1 121 nn eeHppp
Max and Min Entropy
neeHn
ppp nn 2121 log),...,(1
...
Dr. C. Saravanan, NIT Durgapur,
India
Entropy Example
• Example 1
– A, B pA=0.5 pB=0.5
– H(A,B) = -pA log2 pA -pB log2 pB
– = -0.5 log2 0.5 -0.5 log2 0.5 =1
• Example 2
– A, B pA=0.8 pB=0.2
– H(A,B) = -pA log2 pA -pB log2 pB
– = -0.8 log2 0.8 - 0.2 log2 0.2 = 0.7219
Dr. C. Saravanan, NIT Durgapur,
India
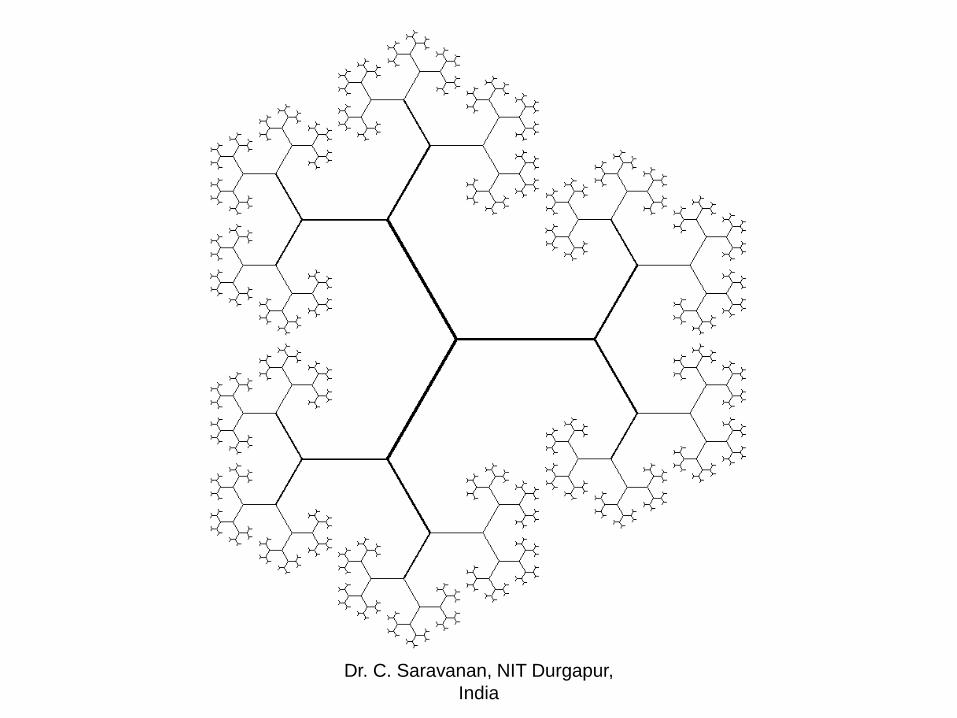
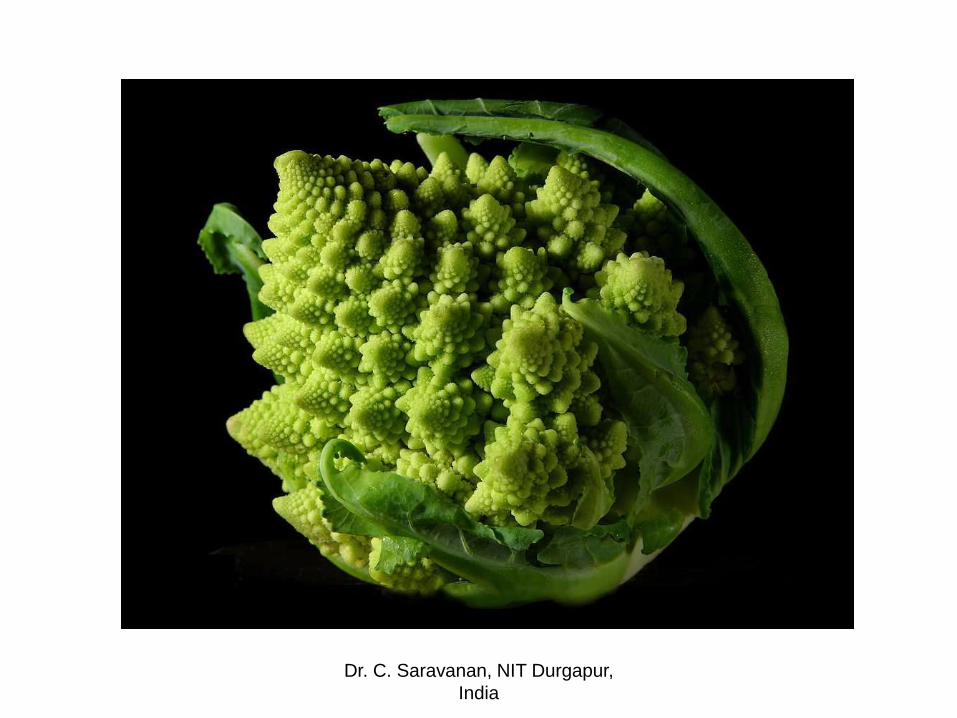
Fractal Compression
• Self similiar regions
• Fractal compression stores this type of
information to achieve compression
• Fractal Image Decoding is resolution
independent.
• if you compress a 64x64 image , you can
decompress it to any size (say 128x128)
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
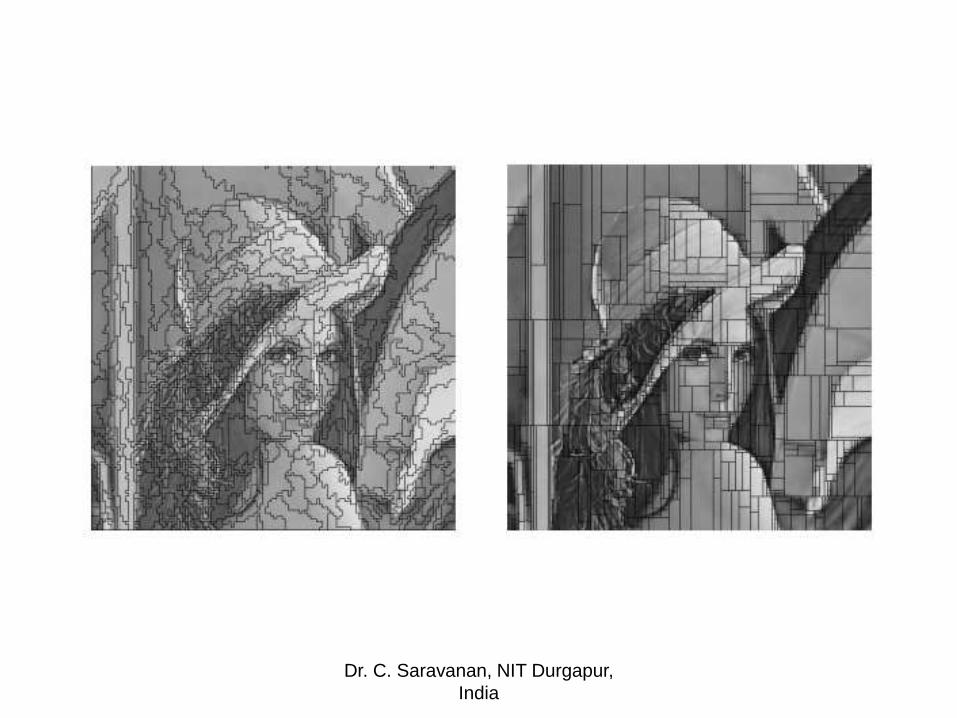
• Research on fractal image compression evolved in the years 1978-85 using iterated function system (IFS)
• subdivide the image into a partition fixed size square blocks
• then find a matching image portion for each part
• this is known as Partitioned Iterated Function System (PIFS).
Dr. C. Saravanan, NIT Durgapur,
India
Challenges
• how should the image be segmented,
• where should one search for matching
image portions,
• how should the intensity transformation
bedesigned
Dr. C. Saravanan, NIT Durgapur,
India
Four views of fractal image
compression
1. Iterated function systems (IFS)
– operators in metric spaces (metric space is a set for which
distances between all members of the set are defined)
2. Self vector quantization
– 4 x 4 blocks - code book
3. Self-quantized wavelet subtrees
– organize the (Haar) wavelet coefficients in a tree and to
approximate subtrees by scaled copies of other subtrees closer
to the root of the wavelet tree
4. Convolution transform coding
– convolution operation used for finding matching regions
Dr. C. Saravanan, NIT Durgapur,
India
Dr. C. Saravanan, NIT Durgapur,
India
Digital Watermarking
• "digital watermark" was first coined in
1992 by Andrew Tirkel and Charles
Osborne.
• First watermarks appeared in Italy during
the 13th century
• Watermarks are hiding identification marks
produced during the paper making
process
Dr. C. Saravanan, NIT Durgapur,
India
• process of hiding digital information in a image / audio / video.
• identify ownership / copyright of image / audio / video.– copy right infringements
– banknote authentication
– pirated movie - source tracking
– broadcast monitoring
Dr. C. Saravanan, NIT Durgapur,
India
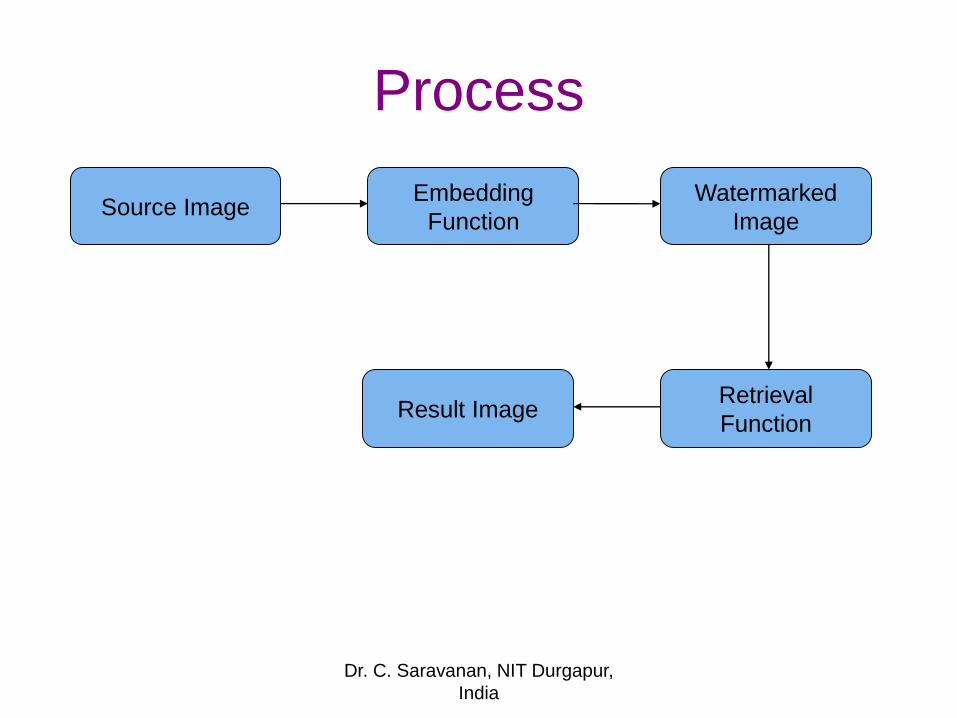
Process
Source ImageEmbedding
Function
Watermarked
Image
Retrieval
FunctionResult Image
Dr. C. Saravanan, NIT Durgapur,
India
Visible Watermark
Dr. C. Saravanan, NIT Durgapur,
India
• Digital watermarking techniques may be
classified in several ways.
– Robustness
• Fragile watermarks are commonly used for tamper
detection - A digital watermark is called semi-
fragile if it resists benign transformations, but fails
detection after malignant transformations.
• Semi-fragile watermarks commonly are used to
detect malignant transformations.
• A digital watermark is called robust if it resists a
designated class of transformations. Robust
watermarks may be used in copy protection
applications to carry copy and no access control
information.Dr. C. Saravanan, NIT Durgapur,
India
– Perceptibility• A digital watermark is called imperceptible if the
original cover signal and the marked signal are perceptually indistinguishable.
• A digital watermark is called perceptible if its presence in the marked signal is noticeable.
– Capacity• The message is conceptually zero-bit long and the
system is designed in order to detect the presence or the absence of the watermark in the marked object. This kind of watermarking scheme is usually referred to as zero-bit or presence watermarking schemes. Sometimes, this type of watermarking scheme is called 1-bit watermark, because a 1 denotes the presence (and a 0 the absence) of a watermark.
Dr. C. Saravanan, NIT Durgapur,
India
– Embedding method• A digital watermarking method is referred to
as spread-spectrum if the marked signal is obtained by an additive modification.
• Spread-spectrum watermarks are known to be modestly robust, but also to have a low information capacity due to host interference.
• A digital watermarking method is said to be of quantization type if the marked signal is obtained by quantization.
• Quantization watermarks suffer from low robustness, but have a high information capacity due to rejection of host interference.
• A digital watermarking method is referred to as amplitude modulation if the marked signal is embedded by additive modification which is similar to spread spectrum method, but is particularly embedded in the spatial domain.Dr. C. Saravanan, NIT Durgapur,
India
Models
• Communication based models
– The sender would encode a message using
some kind of encoding key to prevent
eavesdroppers to decode the message. Then
the message would be transmitted on a
communications channel. At the other end of
the transmission by the receiver, try to decode
it using a decoding key, to get the original
message back.
Dr. C. Saravanan, NIT Durgapur,
India
• Geometric models
– watermarked and unwatermarked, can be
viewed as high-dimensional vectors
– Geometric Watermarking process consists of
several regions.
– The embedding region, which is the region
that contains all the possible images resulting
from the embedding of a message inside an
unwatermarked image using some watermark
embedding algorithm.Dr. C. Saravanan, NIT Durgapur,
India
– Another very important region is the detection
region, which is the region containing all the
possible images from which a watermark can
be successfully extracted using a watermark
detection algorithm.
Dr. C. Saravanan, NIT Durgapur,
India
• http://hal.inria.fr/docs/00/08/42/68/PDF/ch
apter7.pdf
• https://www.cl.cam.ac.uk/teaching/0910/R
08/work/essay-ma485-watermarking.pdf
Dr. C. Saravanan, NIT Durgapur,
India
Point Detection
• Discontinuities in a digital image
• Run a mask through the image
w1 w2 w3
w4 w5 w6
w7 w8 w9
R=w1z1+…+w9z9 R-> Response of the
mask Dr. C. Saravanan, NIT Durgapur,
India
• ABS(R) >= T
– T Threshold
• Isolated point will be different from its
background / neighbors
-1 -1 -1
-1 8 -1
-1 -1 -1
• R will be zero in areas of constant gray
level. Dr. C. Saravanan, NIT Durgapur,
India
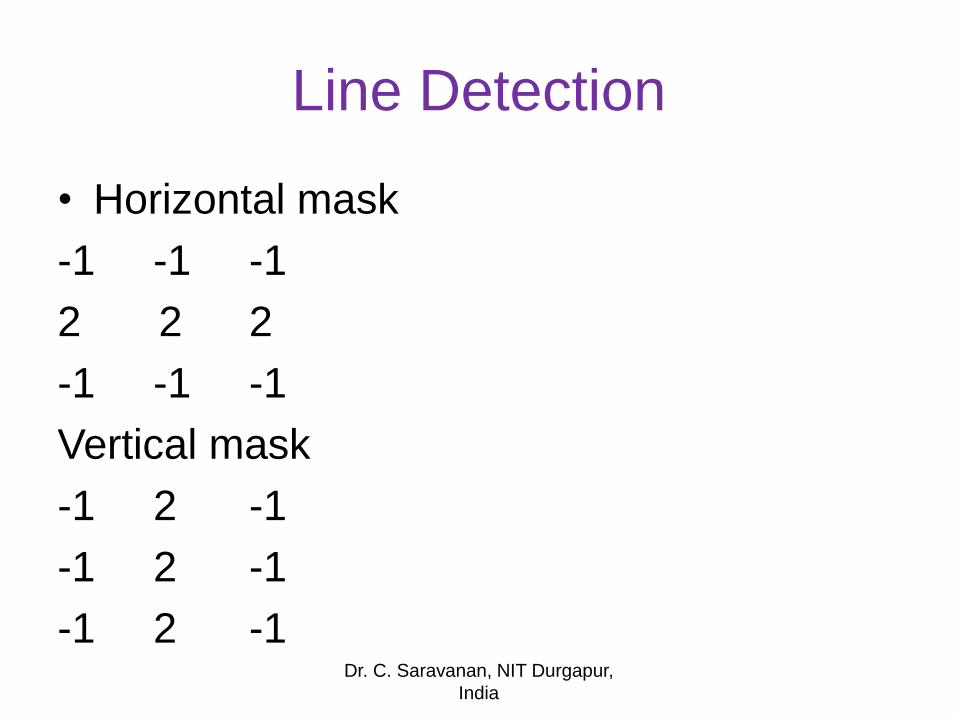
Line Detection
• Horizontal mask
-1 -1 -1
2 2 2
-1 -1 -1
Vertical mask
-1 2 -1
-1 2 -1
-1 2 -1Dr. C. Saravanan, NIT Durgapur,
India
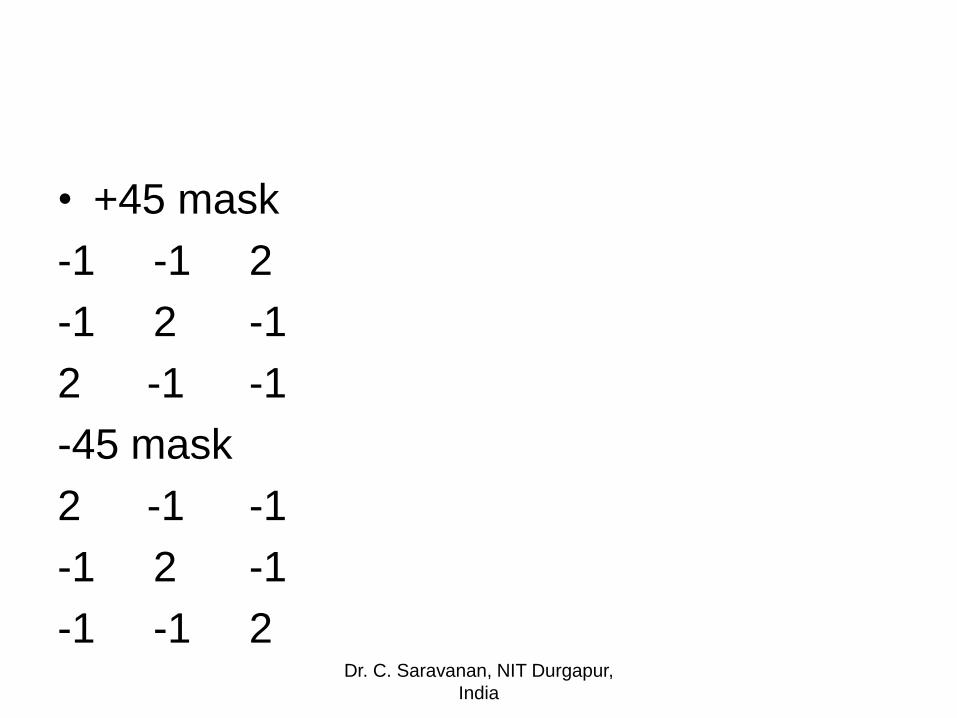
• +45 mask
-1 -1 2
-1 2 -1
2 -1 -1
-45 mask
2 -1 -1
-1 2 -1
-1 -1 2Dr. C. Saravanan, NIT Durgapur,
India
• Four masks run individually through an
image,
• At an certain point Abs(Ri) > Abs(Rj) for all
j not equal i,
• That point is said to be more likely
associated with a line in the direction of
the mask i.
Dr. C. Saravanan, NIT Durgapur,
India
Edge Detection
• Meaningful discontinuities
• First and second order digital derivative
approaches are used
• Edge is a set of connected pixels that lie
on the boundary between two regions
Dr. C. Saravanan, NIT Durgapur,
India
Segmentation
• Classified into
– Edge based
– Region based
– Data clustering
Dr. C. Saravanan, NIT Durgapur,
India
Any Questions ?
Dr. C. Saravanan, NIT Durgapur,
India
References
Computer Vision: A Modern Approach by David Forsyth and Jean Ponce
Computer Vision: Algorithms and Applications by Richard Szeliski's
Computer Vision: Detection, Recognition and Reconstruction
En.wikipedia.org
in.mathworks.com
imagej.net
Dr. C. Saravanan, NIT Durgapur,
India












