Computer Graphics Techniques for Modeling Cloth - IEEE ...frey/papers/draping... · In computer...
14
Computer Graphics in Textiles and Apparel odeling Cloth lexible objects are inherently more diffi- F cult to model than rigid objects. Until about a decade ago, computer graphics was limited to modeling rigid objects, but subsequent advances in algorithms and graphics hardware now support the processing of flexible objects. Nineteen cloth-modeling techniques are summarized and categorized by their main theoretical method: geometrical, physical, or hybrid. Recommendations for future work consider the different goals in textile engineering and computer graphics. Cloth is one class of flexible objects that has received consider- able attention in the computer graphics community. The appear- ance of clothing worn by modeled humans is of particular interest in animation. The textile and fashion industries also welcome tools that accurately generate the shapes of cloth objects and link them with CAD/CAM systems. Cloth is normally woven, giving it special properties that generate interesting shapes when draped. These shapes have always interest- ed textile scientists (for excellent surveys of this work, see Breen’,’). Textile science has concentrated on studying a material’s behavior according to its mechanical proper- ties. As a result, current methods for measuring the physical properties of cloth are very sophisticated. The computation of shape based on these mechanical properties, however, is expensive. In computer graphics or animation, appearance is generallymore important than physical accuracy, so the emphasis has been more on visual realism than on phys- ical accuracy. The textile and apparel industries, how- ever, require both. Nissel~on~,~ discussed early applications of computer graphics in the fashion industry. In this survey, we present a contemporary overview of cloth-modeling techniques and conclude by speculating on future research directions that could optimize the agreement Hing N. Ng and Richard L. Grimsdale University of Sussex between the requirements of visual realism and physi- cal accuracy. Cloth-modelingtechniques are usually classified into three categories: geometrical, physical, and hybrid. The techniques within each category do not follow well- defined patterns. We therefore generally report each work independently accordingto the chronology of pub- lication. Figure 1 presents an overview of the techniques to be discussed. At the end of the discussion of all tech- niques, we summarize their features in a table. Geometrical techniques Geometrical models do not consider the physical properties of cloth. Rather, they focus on appearance, particularly folds and creases, which they represent by geometrical equations. Geometrical techniques require a considerable degree of user intervention; they can be regarded as a form of advanced drawing tool. The work of We;/ Weil’ was probably the first to apply geometricaltech- niques to cloth visualization in computer graphics. He represented hanging cloth as a grid of points and simu- lated its shape by fitting catenary curves between the hanging or constraint points (see Figure 2). A catenary curve is the natural shape of a hanging heavy cable and has the form y = a cosh(x/a) where a is the scaling factor. If two catenary curves inter- sect when projected on the x-z plane, as in Figure 2, a new resultant curve should be determined. Because this would require an extra computation, Weil simplifiedthe process by removing the lower curve. At this stage, his model consists only of a curved wire- frame that approximates the cloth’s structure. A proper simulation of the shape requires the addition of surfaces, which are generated by subdividingthe triangles formed by the catenary curves connecting the constraint points. Figure 3 shows how the surfaces, and thus details of 28 September 1996 0272-1 7-1 6196/$5.00 0 1996 IEEE
Transcript of Computer Graphics Techniques for Modeling Cloth - IEEE ...frey/papers/draping... · In computer...

Computer Graphics in Textiles and Apparel
odeling Cloth lexible objects are inherently more diffi- F cult to model than rigid objects. Until
about a decade ago, computer graphics was limited to modeling rigid objects, but subsequent advances in algorithms and graphics hardware now support the processing of flexible objects.
Nineteen cloth-modeling
techniques are summarized
and categorized by their
main theoretical method:
geometrical, physical, o r
hybrid. Recommendations
fo r future work consider the
different goals in textile
engineering and computer
graphics.
Cloth is one class of flexible objects that has received consider- able attention in the computer graphics community. The appear- ance of clothing worn by modeled humans is of particular interest in animation. The textile and fashion industries also welcome tools that accurately generate the shapes of cloth objects and link them with CAD/CAM systems.
Cloth is normally woven, giving it special properties that generate interesting shapes when draped. These shapes have always interest- ed textile scientists (for excellent surveys of this work, see Breen’,’). Textile science has concentrated on studying a material’s behavior according to its mechanical proper- ties. As a result, current methods for measuring the physical properties
of cloth are very sophisticated. The computation of shape based on these mechanical properties, however, is expensive.
In computer graphics or animation, appearance is generally more important than physical accuracy, so the emphasis has been more on visual realism than on phys- ical accuracy. The textile and apparel industries, how- ever, require both.
Nisse l~on~,~ discussed early applications of computer graphics in the fashion industry. In this survey, we present a contemporary overview of cloth-modeling techniques and conclude by speculating on future research directions that could optimize the agreement
Hing N. Ng and Richard L. Grimsdale University of Sussex
between the requirements of visual realism and physi- cal accuracy.
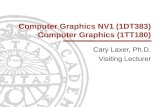
Cloth-modeling techniques are usually classified into three categories: geometrical, physical, and hybrid. The techniques within each category do not follow well- defined patterns. We therefore generally report each work independently according to the chronology of pub- lication. Figure 1 presents an overview of the techniques to be discussed. At the end of the discussion of all tech- niques, we summarize their features in a table.
Geometrical techniques Geometrical models do not consider the physical
properties of cloth. Rather, they focus on appearance, particularly folds and creases, which they represent by geometrical equations. Geometrical techniques require a considerable degree of user intervention; they can be regarded as a form of advanced drawing tool.
The work of We;/ Weil’ was probably the first to apply geometrical tech-
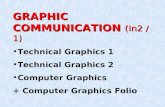
niques to cloth visualization in computer graphics. He represented hanging cloth as a grid of points and simu- lated its shape by fitting catenary curves between the hanging or constraint points (see Figure 2).
A catenary curve is the natural shape of a hanging heavy cable and has the form
y = a cosh(x/a)
where a is the scaling factor. If two catenary curves inter- sect when projected on the x-z plane, as in Figure 2, a new resultant curve should be determined. Because this would require an extra computation, Weil simplified the process by removing the lower curve.
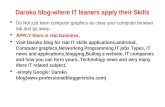
At this stage, his model consists only of a curved wire- frame that approximates the cloth’s structure. A proper simulation of the shape requires the addition of surfaces, which are generated by subdividing the triangles formed by the catenary curves connecting the constraint points.
Figure 3 shows how the surfaces, and thus details of
28 September 1996 0272-1 7-1 6196/$5.00 0 1996 IEEE

the shape, are generated by subdi- viding triangles. New catenary curves are fitted between these new triangles, and folds are subsequent- ly produced by relaxing every point until an arbitrary offset position value is reached. Prior to rendering, spline curves are fitted to the surface of the cloth to make it smoother. Finally, the cloth is represented as a set of cylindrical objects and ren- dered by ray tracing.
Although Weil did not mention execution speed in his paper, we believe it would be fast, excluding rendering time, since it involves no complex numerical methods. The main limitation of the model is that it simulates onlyhanging cloth. And, of course, as a geometrical tech- nique, it does not simulate the prop- erties of real cloth.
The work of Agui et a/. Agui et aL6 presented a geometri-
cal method for modeling a sleeve on a bending arm. They represented the cloth as a hollow cylinder con- sisting of a series of circular rings, indicated as Ri in Figure 4 on the next page. They observed that folds form as a consequence of the differ- ences in curvature between the
Weil (1 986)
Agui et al. (1 990)
Hinds et al. (1 990, 1991, 1992)
Ng et al. (1 995) 1 Overview of cloth-modeling work.
Rudomin (1 990)
Kunii et al, (1 990)
Hybrid Taillefer (1 990)
Tsopelas (1 991)
Dhande et al. (1 993)
Feynman (1 986)
Terzopoulos et al. (1 987, 1988)
b Ng et al. (1 995)
Sakaguchi et al. (1 991)
Thalmann team Magnenat Tahalmann et al. (1 991) Lafleur et al. (1 991) Cariganan et al. (1 992) Yang et al. (1 992, 1993, 1994) Werner et al. (1 993) Magnenat Thalmann (1 994) Volino et al. (1 994, 1995)
Li et al. (1 993, 1994, 1995, 1996) Aono (1 990)
Breen et al. (1 992, 1993, 1994), Anderson (1 993)
Okabe et al. (1 992)
Provot (1 995)
inner and outer part of the bent sleeve. Figure 5 shows two cases, before and after bending.
L(i, j) is the distance betweenPij and&+ Deformation of the cloth-a fold-occurs when dL(i, j ) is kept to a minimum, where dL(i, j) represents the difference in dis- tance before and after the deformation and is defined as
Using this idea, folds are simulated by transforming the circular rings into polygons. Figure 6a shows an unde- formed ringR, on thex-y plane. The shaded area repre- sents the cross section of the arm. The process is simplified by assuming that R, and the resulting poly- gons are symmetrical about they-axis.
In the first step, the process locates the point Na with
Step 1
Y
Step 4
IEEE Computer Graphics and Applications
2 Twocatenary curves.
3 Subdivision of triangles t o generate surfaces and details of shape.
29

Computer Graphics in Textiles and Apparel
4 Cloth sleeve represented as a hollow cylinder.
5 Asleeve section (a) before bending and (b) after bending.
6 The process of forming a polygon: (a) undeformed ring R;, (b) transformed to compute a sleeve fold.
7 Layered structure for associating cloth to skin and skeleton for animation.
30
&(i, j) set to greater than a predetermined threshold &,. The region with j < Na remains unchanged. The process continues for N1 with threshold dL1 and for N2 with threshold dLz where dL2 > dL,. Based on the
X
assumption that real folds are always flat on the top part of the sleeve, a straight line parallel to the x-axis is always assumed (indicated as the segmentbetweenj = J/2 and j = N2 in Figure 6b).
This process of creating polygons is applied to every ring on the sleeve. The resulting acute corners must then be smoothed by repositioning each point to be at the average of its four neighboring points.
The simulation described in Agui et a1.‘ targets just the specific application of a folding sleeve. They do not state how they determine thresholds.
The work of Hinds et a/. Hinds et al.7 targeted the automation of garment
manufacture. They obtained the shape of the human body by digitizing the upper torso of a mannequin. In their system, a garment is represented by a number of 3D surfaces (panels). A 3 D interactive editor allows the garment designer to position a panel on the body.
The panel is defined by its edges, and these are spec- ified as offsets from the body. All remaining points of the panel are then generated by interpolation. e conti- nuity is maintained between the panels forming a gar- ment by choosing the interpolation technique carefully. The designer can add textures and folds to achieve fur- ther realism. A fold is introduced as a harmonic func- tion superimposed on the panels.
Hinds et al. addressed the early design stage of man- ufacturing in their early work. In later work,’ they reported how to translate the 3D panels to 2D patterns by using Calladine’s method.’ They returned later to refinements of interactive garment design.”
Geometrical work of Ng et a/. Intending to provide an animation tool that would
quickly produce images of clothed objects, Ng et a1.”J2 proposed a modeling technique that closely associated the cloth layer with the shape of the underlying skin layer. The two layers consist of a series of sections with identical numbers of vertices on each layer. Figure 7 shows the data structure.
To support the important role that folds play in giv- ing cloth a realistic appearance, an algorithm was devised to generate them by using gaps between the cloth and skin layers. The algorithm is based on the idea that folds are likely to occur where the cloth is slack.
Once the position of a fold line has been nenerated. sinusoidal func-
September 1996
- tions are mapped along the line to mimic natural folds (see Figure 8).
The technique incorporates an interactive editor called Geoff (Geometrical Editor for Fold Formation), which gives the user considerable control over fold gen- eration. Folds also occur as a result of the underlying structural forma- tions. For instance, when an arm is bent, folds are likely to occur on the sleeve near the bend. Therefore, a set of rules was developed to gener- ate fold lines automatically. The user

can modify these fold lines via the editor. Attributes are allocated to each fold line to support individual patterns and simple animations. The technique is very fast since there are no complex equations to be solved. ....
Physical techniques We turn now to physical techniques. The techniques
in this category represent cloth models as triangular or rectangular grids, with points of finite mass at the inter- sections. The forces or energies of points on the cloth are calculated in relation to other points.
The formations or the number of neighboring points vary according to the technique. Energy-based tech- niques calculate the energy of the whole cloth from a set of equations and determine the shape of the cloth by moving the points to achieve a minimum energy state. Force-based techniques represent the forces among points as differential equations and perform a numeri- cal integration to obtain the point positions at each time step. In general, energy-based techniques are used to produce static simulations while force-based techniques are used in dynamic simulations.
Physical techniques generally produce the behavior of a flexible object that resembles cloth. The degree of this resemblance varies from technique to technique.
The work of Feynman Feynman13 proposed a physical method for modeling
draped cloth. He represented the cloth in 3D space by a 2D grid, as shown in Figure 9. Observing that the equi- librium shape of the draped cloth is obtained when its energy is a minimum, he then derived an energy equa- tion from the theory of elastic plates:
where k,, kb, and kg are elasticity, bending, and density constants, respectively. The energy terms included are the elasticity energyEeimt, the bending energyEbend, and the gravitational energy$,. The energy at point PIJ is calculated in relation to the eight surrounding points. The steepest descent method is used in searching for the energy minima. A multigrid technique accelerates the process.
Feynman presented simulations that included hang- ing clothes and cloth draped over a sphere. No simula- tion times were reported.
The work of Terzopoulos et a/. Terzopoulos et al.14,15 introduced a deformable model
intended for generalized flexible objects, but the model has been used in several cases for cloth visualization. Referring to Figure 10, the position of a point on the body is represented by
where a is a point in the intrinsic coordinates of the body. In its undeformed state, the body can be repre- sented by
Profile function J /Fold function
a2 Deforming body m
Pi,j
i -
P n d e f o r m e d body
ro
J rl
Lagrange's equations of motion are used to obtain
d2r h at2 at
p- + y - + Q(r) = f (r, t )
where p is the mass density, yis the damping density, &e is the internal elastic force that counteracts defor- mation, and f(r, t) is the net external force. The energy function e(r) for a deformable curve is
E@)= 1G-G' 12,+IB-Bo1$dalda2 I n
where I . I u and I . Ip are weighted matrix norms. The metric tensor G is defined as
IEEE Computer Graphics and Applications
8 Mapping process to determine fold lines and generate folds along them.
9 A 3D cloth represented as a 2D grid.
10 Definitions of the deform- able model of Terzopoulos et al.
31

Computer Graphics in Textiles and Apparel
11 (a) Cloth represented as a grid and (b) point Pi,j
with its four neighboring points.
12 Three main parts of the Thalmann system: (a) 2D panel edit, (b) 3D seaming, and (c) 3D animation.
32
d r d r Gij(r(a)) = aai dai
The curvature tensor B is defined as
d2r Bij(r(a)) = n.- aaiaaj
where n is the unit surface normal at point a. To obtain the solutions, Equation 1 is first discretized
by a finite-difference or finite-element method, result- ing in a large system of simultaneous ordinary differ- ential equations. By integrating the equations through time, the model simulates the dynamics at each time step. The model is numerically expensive.
The work produced simulations of a waving flag, a carpet draped over various objects, and a sequence in which a piece of cloth is torn apart.
The work of Aono Aono16 used elasticity theory and DAlembert’s prin-
ciple to produce a wrinkle-propagation model. In his model, cloth is viewed as a medium that transmits wrin- kles. A basic model is first produced by making the fol- lowing assumptions:
In the initial state, the cloth is homogeneous, isotrop- ic, and linearly elastic.
w By using D’Alembert’s principle, the cloth is in an equi- librium state at all times under the given applied forces.
w The cloth never stretches or shrinks along the surface normal direction.
Using the first assumption and the stress-strain equa- tion, Aono obtains the following equation:
t ’ pi,j+l
I Lab
September 1996
b- Body
E _ 1 E
V _ _ E
0
E
E v _ _
1 E -
1 2G -
where eU is the strain, z$ is the stress, E is the Young’s modulus, vis the Poisson’s ratio, G is the modulus of rigidity, andG =E/(2(l+v)). Usingthesecondassump- tion and introducing damping, Aono obtains the next equation:
(3) %+++-+A az, az, =p-u,+c,-u, a2 a
at2
where5 is an applied force along thex, y , or z direction, cl is the damping constant, ul is the displacement and p is the density of the cloth. By using the strain-displace- ment equation, E~ = -((auJ/ax,) + (Wax,)), and elimi- nating z, from Equations 2 and 3, the following is obtained:
a d2 a &I at2
GV2u, + (A + G)-e + f, = p-U, + C, -u, (4)
where il= Ev/((l- 2v)(1 + v)) is the Lam& constant. This is a modified form of the equation for a wave prop- agating in an elastic continuum.
From the third assumption, no displacements occur along the z-axis. Therefore,
(5)
where u, v, and w are the displacements along the x, y , and z axes, By substituting Equation 5 into Equation 4, the equation for the intrinsic model is
-1 d d“ d GV;,p, + (A + G)-e,,y + f, = p-U, + C, -u, &I at2 at
where V:, = a2i&? + a2iayZ and e,,=au/ax + av/&. Aono then modified this intrinsic model to include
anisotropy and viscoelasticity. He considered two types of anisotropy, global and local. Global anisotropy affects the whole shape. Aono included it by adjusting the ratio of the Young’s modulus to the modulus of rigidity. Local anisotropy affects the shape of the fibers and is included by employing different displacements uxx along the warp and weft directions.
Aono modeled the viscoelasticity effect by a system of springs and dashpots connected in parallel. Finally, he compared the modifica- tions to the original model.
kBody (4

Aono’s model concentrated on the propagation prop- erties of a wrinkle on a piece of cloth under an applied force. The cloth acts as the transmitting medium. The model does not consider draping or interaction with the underlying object.
The work of Sakaguchi et a/. This team from the Kyoto University of Japan devel-
oped a system called Party17 to simulate clothes. The sys- tem used a grid to represent the cloth, as shown in Figure 11. The simulation was based on Newton’s law of dynamics:
where r is a point on the grid, m is the mass of that point, and F,, and Pint are respectively the external and inter- nal forces acting on the point.
The internal forces included are
Fint = Fspring + Fvisco + Fplas
The components of the internal forces are based on Terzopoulos’ deformable model,15 where Fspring is the force due to the elongation of a spring, Fwsco is the force due to viscosity, and Fplas is the force due to plasticity.
Sakaguchi et al. determined the velocity and position of the cloth by using Euler’s method. They also consid- ered the interactions of the cloth with the underlying human body. They based collision handling on the con- servation of momentum. Since the cloth and the human body are represented by manyvertices, checking for col- lisions would be a very costly computational task. They sped up the process by using a finite bounding volume to limit the amount of space involved in a collision detec- tion. The responses to collision detection included con- sideration of friction.
They presented simulations that included a cloth hanging from a pole and blowing in the wind and a dress on a model of a human body. No simulation times were given.
The work of the Thalmanns and their team The Thalmann research team has addressed cloth
visualization problems in an approach analogous to the production of a garment by a tailor. Their system con- sists of three main parts, shown in Figure 12. The gar- ment is first represented as a polygonal panel (Figure 12a). Then its edges and vertices are seamed together in 3D (Figure 12b). Finally, the animation addresses the interaction between the body and the garment (Figure 12c).
The Thalmanns’ first paper” briefly surveyed cloth modeling, particularly comparing the models of Terzopoulos and Aono before describing their own work, which involves dressing synthetic actors. They focused on how to manage the interaction between the garment and the body.
Lafleur et a1.I9 investigated collisions between the gar- ment and the body. This work recognized that the Moore-
NO
P surface
Wilhelms collision method” for dealingwith rigid objects did not apply to flexible objects such as cloth. Therefore, Lafleur et al. proposed a new method for creating a vol- ume force field around the cloth surface.
Consider the triangle Po-P1-P2 in Figure 13-one of many triangles that make up the surface of a cloth. The normals (NO, N1, Nz) at each vertex of the triangle form a force field. When a point enters this volume force field, the Lafleur method applies a repulsive force so that, in the next step of the calculation, the point moves away from the cloth triangle.
Animation must handle many collisions between the cloth and the body and among the triangular facets in the cloth itself. This can be very time-consuming, since the cloth and body are normally represented by many small triangular facets. Yang et al.’l gave a more com- prehensive treatment that increased its speed by using a bounding box around the facet and by employing an octree structure to search for facets that might intersect.
Carignan et a1.” presented the method of determin- ing the cloth deformation during animation and used the following dynamic equation:
where
Equation 6 is based on Terzopoulos’ deformable model with Equation 7 substituted for the original scalar term. Carignan et al. eliminated the bouncing effect by using the collision-handling method presented in Lafleur.19 An inelastic collision results from using con- servation of momentum to determine self collisions and collisions between the cloth and the body. In addition, by introducing extra force constraints to the garment panel and the human body, this approach can achieve the effects of seaming and fixation of the garment to cer- tain parts of the body.
The Thalmanns’ system required a special user inter- face.23 The immediate application of their work is in the garment ind~stry.‘~ A recent paperz5 summarized the work and outlined the possibility of using the system in a virtual environment.
Instead of Equation 1 proposed by Terzopoulos et Yangz6 used Newton’s law of motion
IEEE Computer Graphics and Applications
13 Force field around a cloth surface.
33

Computer Graphics in Textiles and Apparel
14 Compo- nents of F(r, t).
15 f i , j and its neighbors.
16 Cloth represented as triangles.
34
f . . .
fexternal
friction
fcurvature-elasticity
fcurvature-viscosity
F(r,t)
ti I
j+2
j+l
i
j-1
j-2 i
k 2 i-1 i i+l i+2
(8) d2r
F(r,t) = m(r)- At2
where F is the resultant force at the point r. The com- ponents of this force are quite comprehensive (see Figure 14).
Yang introduced thefcurva~re-viscosi~ force term to sim- ulate the viscose nature of the cloth and computed the internal force on a point in relation to the 12 neighbor- ing points (Figure 15). By applying Euler's method to Equation 8, he calculated the velocity and position of the cloth at a certain time. By employing a bounding box and an efficient hierarchical data structure, he reduced the time needed for collision detection. Collision response was calculated using inverse dynamics and conservation of momentum.
Yang also realized that the normal constraints used for rigid objects may not be suitable for flexible objects. Therefore, he developed special constraints for attach- ing and seaming the cloth and smoothing the seams.
September 1996
He produced several impressive computer-generated animations to demonstrate the capability of the tech- nique. The computation time to calculate one frame of animation, in which a cloth is represented by a 25 x 40 grid, is about 20 minutes on an SGI Indy workstation. Yang indicated that 40 percent of the total computation time is spent handling collisions.26
Later, Volino et aLZ7 used elasticity theory and Newtonian dynamics to simulate deformable objects, including cloth. They represented cloth as a set of par- ticles arranged as vertices of many small triangles (see Figure 16). Their model takes atwo-pass approach. The first pass considers interparticle constraints and exter- nal constraints such as gravity and wind. The second pass determines collisions by using the law of conser- vation of momentum.
The approach ofVolino et al. is similar to that of Breen et al. (next section), but in the reverse order. The inter- particle constraints are derived from the classical elas- ticity theory of an isotropic surface. The force due to the stresses at the edgej of the ith triangle is
where Tis the thickness, L, is the length of the edge j, m, is a unit vector perpendicular to the edge j, o, and Tare the stresses in the corresponding direction. The force on the edge is then translated equally to the vertices (or particles) joining this edge.
Volino et a1.28 also improved collision detection in the Thalmanns' system. By exploiting the geometrical reg- ularity of the cloth surface and representing it hierar- chically, the time to detect collisions became roughly proportional to the number of colliding polygons, rather than the total number of polygons. Several cloth simu- lations of one minute were developed, and the time to produce them was on the order of hours on an SGI work- station.
The work of Breen et a/. Breen et al.1329 used particles3' to model the draping
behavior of woven cloth. This method treats the cross- ing points of the warp and weft threads as particles (see Figure 17). The Breen et al. simulation was in two stages. In the first, particles are allowed to fall freely (see Figure 18a). Any collisionwith the object or the ground is deter- mined during this step. The particle positions can be obtained using the equation
m a + cv = m g
where a is the acceleration, v is the velocity, m is the mass, c is the air resistance, and g is the gravitational acceleration constant.
The result is a rough shape of the draped cloth. In the second stage (Figure 18b), an energy mini-
mization process is applied to the interparticle energy functions to generate fine detail in the shape of the cloth. The total energyEtorallJ of the particle P,, is defined as

where Erepellj iS the repulsion energy among particles, EscretchIJ is the stretching energy, EbendIJ is the energy due to interthread bending out of the plane, EtrellIsIJ is the energy due to interthread bending in the plane, and EgrayltylJ is the gravitational energy. The final equilibri- um shape of the cloth occurs when there is minimum energy over the whole of the cloth.
To search for the energy minima, Breen et al. devel- oped an algorithm called stochastic gradient descent.’ SGD is an improved simulated annealing method to determine the global minima of a system, but it takes considerable time. The simulation time used in their examples ranged from three days to a week on an IBM RS6000 workstation. They believe that the message- passing environment, on which the model is built, imposes a large overhead.
The parameters used in calculat- ing the energy terms are determined on an ad-hoc basis. In a 1994 Siggraph paper,3’ Breen et al. used piecewise polynomial and approxi- mation techniques to derive the bending energy termEbendlJ and trel- lis energy term Ecre~,,, from empiri-
Warp threads
$ 2 ‘ $
(a)
4 x o I Yo A - J\,
-_ cal data. They presented several simulations, including cloth draped over an armchair, a square table, and a circular table.
Anderson3’ implemented Breen’s model on the trans- puter-based Edinburgh Concurrent Supercomputer. He reported obtaining results within hours, instead of days.
Y
The work of Okabe et a/. The Okabe et al. cloth visualization system33 is direct-
ed toward automating the traditional garment manu- facturing process. The user supplies a rough 2D paper pattern, which is scanned and then mapped onto a 3D object (a model of a mannequin was used). The system first forms a 3D structure that roughly resembles the underlying body. To add the drape effects of real cloth, the system formulates the cloth’s mechanical properties as energy equations and uses a minimization technique to determine the shape of the cloth at eq~i l ibr ium.~~ The 3D structure, with the drape effects, then undergoes another mapping process to generate a more accurate 2D paper pattern.
In the mechanical analysis of the drape effects, their system represents cloth by a triangular mesh, as shown in Figure 19. Parametric values of u and v (representing the cloth’s warp and weft) are used so that a pointp(u, v) has a corresponding pointp(x,y, z) in the model.
The equilibrium shape of a cloth can be determined by finding its energy minima. The set of energy equation in this case is
where E, is the elongation energy, Esh the shearing ener- gy, Eb the bending energy, E, the twisting energy, Eg the gravitational energy, and Ep the penalty energy function to prevent the cloth from penetrating the body.
The energy terms Ee, Esh, Eb, and Em are derived from
I
i +
V
the elasticity theory of shell structures. Every point on the cloth has a certain energy value that can be calcu- lated according to Equation 9. Therefore, by moving every point toward the energy minima, the cloth achieves an equilibrium shape. The energy minima was defined by a steepest descent method called Adaptive Coefficient Gradient Method (ACGM) .
This approach took about 20 minutes of computation time on an IBM RS6000/320 workstation to model a cloth represented by 1,300 nodes.35
The work of Li et a/. Li et a1?6 considered the particular situation of a piece
of cloth immersed in an airflow. The cloth is represent- ed as an impermeable stream surface in the form of m x n small patches. They used the simplified Reynold’s aver- aged Navier-Stokes equations to find the forces on each patch and thus to determine distributed forces on the whole cloth. Cloth deformations are determined by using these forces and Terzopoulos’s model.
The reported simulations used 200 patches to repre- sent the cloth and required about 3 seconds on an SGI Power workstation to complete a 1,000-step calculation of the distributed forces. The model’s memory require- ments will increase enormously if larger numbers of patches are used.
Their early work36 treated the airflow as quasi-steady, that is, the instantaneous airflow velocity is unchanged. In later work,37 Li et al. changed their model to treat the airflow as unsteady, that is, with a constant change of flow velocity. This modified model is suitable for simu- lating large cloth movements with rapid changes of air velocity. The simulation time is longer than with the quasi-steady version. For a cloth represented by 20 x 20
IEEE Computer Graphics and Applications
17 A woven cloth as particles.
18 Thetwo stages of the Breen et al. simulation.
19 Represen- tation of cloth as a triangular mesh.
35

Computer Graphics in Textiles and Apparel
20 Themass- spring model.
36
Flexion springs . Pi,j+2
Pi,j+l
Structural L springs
Pi,j P.+I,,
“i,j+l pi+l ,j+l
Sheer X springs
Pi,, Pi+1 ,j
patches, it took about 32 seconds on the same platform to perform a 1,000-step simulation. The memory requirement to represent a cloth with a large number of patches remains a limitation.
This work formed Li’s doctoral d i~ser ta t ion ,~~ a con- densed version of which appeared in The Visual Computer.39 The model targeted the particular applica- tion of cloth in an airflow and was not concerned with draping effects. The simulation of a flag blowing in the wind was impressively realistic.
The work of Provot Provot4’ used the classic mass-spring model shown in
Figure 20a to simulate cloth under constraints. He clas- sified the springs as flexion, structural, or sheer springs, as shown in Figure 20b, and used Newton’s law of dynamics in the simulation:
where m is the mass of the pointP(i,j) and a(i,j) is the acceleration of that point. Fint(i, j) represents the inter- nal forces at P(i, j) :
f
where xis the stiffness of the springs, R is a set of neigh- boring points surrounding Pi,, and
is the undeformed length between the point P,, andPk,l. This model considered FexiiJ to be composed of three
external forces. First, the gravitational force is
where g is the gravitational acceleration constant Second is the damping force
Fdamp(Pi,) =-Wij
where c is the damping constant and VIJ is the velocity of l?,.
Third is the viscosity force
September 1996
where k is the viscosity constant, n,, is the unit normal at%, and ufluld is the fluid velocity. Provot used the Euler method to integrate Equation 10 through time so that the position ofP,, at each time step can be obtained.
Provot observed that when a hanging cloth is simu- lated using the classical model, unrealistic deformations will occur at the constraint points. To reduce this effect, the stiffness could be increased. However, this would require more iterations to yield the solution. Provot solved this problem by detecting the deformation rate in those springs around the constraint points to deter- mine if any exceeded the predetermined threshold. If so, their elongation was limited to 10 percent. Provot illustrated the effect of this modification by giving sev- eral simulations, including a cloth held by two corners and a flag in the wind. The computation time was about 1 minute to compute 1 second of animation for a cloth represented by a 17 x 17 mesh on a Sun Sparc 10 work- station.4l Collisions were not considered.
The physical work of Ng et a/. Ng et al.42 presented a cloth-visualization system that
determined the cloths shape by an energy minima gov- erned by a set of energy functions. These are modifica- tions of Feynman’s functions.13 An improved multigrid method and searching method for the energyminimum allow the system to run on a PC. The results are pre- sented in DXF format, commonly used by many CAD software packages.
Simulation examples included hanging clothes and a cloth draped over a square surface. The simulation time in each case was under two minutes on a 486 33MHz PC.
Hybrid techniques
metrical methods. The hybrid techniques combine physical and geo-
The work of Rudomin R ~ d o m i n ~ ~ suggested reducing the computation time
required by traditional physical techniques by using a geometrical approximation as a starting condition. His method simulates drape effects by first effectivelywrap- ping the object in the cloth to determine the object’s con- vex hull (Figure 21a). Next, the lower part of the convex hull is removed by introducing a lower point along the axis of the object’s center of mass (Figure 21b) and recal- culating the hull. This computed upper hull may be larg- er than the actual cloth.
Rudomin then developed an algorithm to map this upper hull onto the cloth space (a simple 2D rectangle) and to trim any points lying outside the cloth. All the remaining points inside the cloth are then recomputed to form a 3D cloth hull. This gives the approximate shape of the draped cloth. Terzopoulos’ deformable is then used to refine the shape.
The simulation examples reported for this work used small grid sizes and did not include enough detail to assess the method. Finding the convex hull of a polyhe- dral object can be quite time-consuming, and therefore

the benefit of using this geometrical initial input was not clearly demonstrated.
w
The work of Kunii et a/. Although Kunii et al.44 recognized the realistic
images possible from using physical techniques to model flexible objects like garments, they also recog- nized the limitations. First, flexible objects are usually represented by many small elements, so the computa- tion time is very long. Second, it is difficult to obtain the right parameters for the differential equations rep- resenting the objects.
Since geometrical techniques have their own limita- tions-namely, the difficulty of incorporating dynamic constraints and representing local structure accurate- ly-Kunii et al.44,45 therefore proposed a hybrid method. The first step is a physical simulation of the cloth in which the two boundary edges are gradually brought together. The simulation represents the cloth as a grid with springs connecting the points, as shown in Figure 22a. Two kinds of energy are defined, metric and cur- vature, shown in Figure 22b and 22c, respectively. The shape of the cloth is obtained by using a gradient descent method to find the energy minima.
After this step, singularity theory is used to charac- terize the resulting wrinkles. Subsequent simulations use the captured features as modeling primitives. These features include the position and types of characteris- tic points, and the contours associated with the charac- teristic points.
In the second step, these features are specified on a garment and surfaces are then constructed between the characteristic points to form the wrinkles. A sinusoidal curve is used to construct the surface:
nrc f(s) = xsin(-s) a
where x is a small constant, n is a natural number, A is the length of the curve, s is the parameter for arc length (0 5 s 2 A), andf(s) is the vertical displacement of the points. Energy minimization is then applied again to the garment with the wrinkles added.
Kunii et al. produced several animation sequences of a sleeve on a bending arm using the following assumptions:
The number of characteristic points remain constant. The contours get sharper as the animation progresses.
H The wrinkles get deeper as the animation progresses.
There was no strategy for specifymg the characteristic points, and interactions with the underlying object were not considered.
The work of Taillefer Taillefer% categorized the folds in a hanging cloth into
two types, horizontal and vertical, as shown in Figure 23. He modeled the horizontal folds using catenaries, as suggested inWeL5 The offset of each horizontal fold (z value) from the plane containing the hanging points PI and PZ is calculated by
Convex hull ,d
Upyer hull
i
/ Horizontal folds
arctan(lO(l- PIPz / L ) ) rc/2 \ z = z m a x
\ \
The vertical folds are modeled using a relaxatioh process similar to Weil's but with more external constqaints. These constraints include stretching, bending, g rT ta - tional, and self-repulsion energies. To reduce the COY- putation time, the relaxation is only carried out on the contours of the vertical folds.
Taillefer's work is an extension of Weil's and address- es only hanging cloth.
The work of Tsopelas T ~ o p e l a s ~ ~ adopted a hybrid technique to model folds.
He treats garments as thin cylindrical tubes under axial loads and simulates garment folds using thin-walled deformation theory. This process focuses on regions where folds are most likely to appear, that is, regions with large curvatures. These occur at the back of the knees or at seams.
In processing thin-walled objects under axial load,
IEEE Computer Graphics and Applications
21 Definitions of the hulls: (a) convex hull from wrapping and (b) upper hull recomputed from dropped lower point.
22 Physical model of cloth using (a) spring connecting points, (b) metric energy, and (c) curvature energy.
23 Two types of folds: horizontal and vertical.
37

Computer Graphics in Textiles and Apparel
24 Parameters of a buckled cylindrical object under axial force.
25 Generating a swept surface.
38
Force
I Generatrix curve’
diamond patterns occur (see Figure 24) and the buck- ling wavelength il can be calculated using
1=1.74t /D
where tis the fabric thickness and D is the diameter of the tube.
Once these diamond patterns have been located, the process traces several principal curve lines (which Tsopelas refers to as threads) in each diamond and then fits them with elasticas. The deformation of an individ- ual elastica is calculated using the equation
where B is the bending rigidity, ko is the initial curva- ture of the elastica, Ris the reactive force, w is the weight per unit length, @is the angle between the tangent of the elastica and the line joining the endpoints after the force F is applied, and s is the length of the elastica.
The deformed surfaces can now be constructed by interpolating between the points on the elasticas using nonuniform B-splines. When the garment moves, the points that form the folds also move. For each step in the motion, new principal curve lines (threads) are traced and elasticas are fitted. The force needed to pro- duce such a movement is calculated using an inverse dynamics process and is subsequently applied to other threads to form crumples.
September 1996
Tsopelas presented several diagrams of symmetric and unsymmetric collapses of sleeves. Neither the col- lisions between the garment with itself nor with the underlying body were considered. The work was imple- mented on a Sun Sparc2 workstation. Although he did not mention computation time in his paper, we estimate that Tsopelas’s approach would obtain results in the order of minutes.
The work of Dhande et al. Dhande et al.48 used a swept surface to model the
draping effects of a fabric. They use a generatrix and a directrix curve to generate a biparametric surface (see Figure 25). The surface is defined by
where r (u , v) is any point on the surface, r2(v) is the directrix curve defining the surface of the underlying object, M is the transformation matrix for the genera- trix curve rl from the local n-b-t coordinate system to the global x-y-z coordinate system, and r l (v , (u)) defines the shape of the fabric when it is outside the underlying object.
An elastica that includes the fabric’s bending and shear properties is used to represent rl. We therefore classify the technique as hybrid. It produced a good approximation of the way fabric drapes over a rigid flat surface. However, as the authors admitted, it will be dif- ficult to simulate the effects of cloth draped over com- plex objects.
Conclusions Table 1 summarizes the essential features of the work
on cloth visualization surveyed here. Execution time, an important issue, was not always reported. Where tim- ing information was not available, we estimated it. We classify a technique as fast if it requires seconds to com- plete a simulation, medium if it requires minutes, and long if it requires days. This roughly indicates the com- putational requirements of the individual technique.
Our survey shows that physical techniques normally involve solving a large set of differential equations or iterating the process many times to search for an ener- g y minima. Hence they require longer computation times than other techniques. The time required ranges from minutes to days.
Some physical parameters are better expressed in the form of energy (for example, strain energy of the cloth); others are better expressed as forces (for example, wind). The nature of the application therefore drives the choice between these two forms of physical repre- sentation. Otherwise there is little to choose between them. Physical techniques allow intuitive control in selecting the parameter values, hence their popularity. For example, an increase in the mass value will result in a heavier cloth.
The alternative geometrical techniques do not attempt to model the cloth properties faithfully. Instead, they produce satisfactory shapes that give the appear- ance of the cloth sample. Geometrical techniques do not provide as intuitive control over parameters selection as
\

do physical techniques. They have the advantage, how- ever, of short execution times.
Hybrid techniques exploit the advantages of the other two techniques. They usually employ a geometrical tech- nique to determine a rough shape for the simulated cloth and then use a physical technique to refine the structure.
Cloth is a nonlinear material. Most models employed in the physical techniques are based on elasticity theo- ry, which considers macroscopic behavior and thus does not accurately describe a cloth. However, representing every thread would require too large a model. Garment
manufacturing and textile engineering require an accu- rate description of cloth. Moreover, garment design, ani- mation, and visualization require a model that produces results rapidly yet simulates the behavior of cloth satis- factorily.
Can we obtain a scalable model that satisfies both worlds? This is still an open question. The degree of accu- racy can depend on the number of iterations. We foresee this scalable model using some form of hybrid technique.
We also foresee the need for a unified model that can simulate a cloth in all situations, from a hanging cloth to
IEEE Computer Graphics and Applications 39

Computer Graphics in Textiles and Apparel
40
one draped over a complexobject. Currently, most mod- els can do well in one situation but cannot deal with other situations without modification.
Textile engineers investigating cloth modeling prob- lems have generally focused on deriving accurate mod- els or methods to measure the properties of cloth. The overall shape of a cloth was not of major interest. Recent work has focused on the use of finite-element meth- o d ~ . ~ ~ - ~ ~ Cloth is a complex material and to describe it accurately and quickly requires long-term research. Research workers in the textile and graphics communi- ty need to tackle these problems collaboratively.
Current cloth visualization techniques lack the means for fashion designers to input their requirements. Models should help designers visualize their ideas dur- ing the garment design process. Before a garment is manufactured, fashion designers already have a con- cept of what it will look like when it is worn. They have hitherto expressed their designs with pencil sketches. If they can move their design stage to computers, the time and cost of the whole garment manufacturing cycle will go down. People at different physical locations can par- ticipate in the design process via communication links. We believe that VR technology can be applied success- fully in this area.
Cloth visualization is an exciting branch of computer graphics. We hope our review will stimulate further interest.
Acknowledgments We would like to thank Mamiko Murao, Akria Ijuin,
and Kazuhira Kondo for their help in translating the Japanese references. Many authors sent their reports, papers, and theses, and answered our queries in com- piling this overview. We thank them. Thanks also go to the reviewers for their helpful comments. The first author is supported by scholarships awarded from the Croucher Foundation and the University of Sussex; their help is gratefully acknowledged.
References 1. D.E. Breen,AParticle-BasedModelfor Simulating the Drap-
ing Behavior of Woven Cloth, doctoral dissertation, Rens- selaer Polytechnic Inst., Apr. 1993.
2. D.E. Breen, A Survey of Cloth Modeling Research, Tech. Report TR-92030, Center for Advanced Technology, Rens- selaer Polytechnic Inst., July 1993.
3. J. Nisselson, “Computer Graphics and the Fashion Indus- try,”Proc. of Graphics Interface, 1986, pp. 1-6.
4. J. Nisselson et al., “Computer Graphics in Fashion,” Com- puter Graphics (Proc. Siggraph), Vol. 21, No. 4, July 1987,
5. J. Weil, “The Synthesis of Cloth Objects,” Computer Graph- ics (Proc. Siggraph), Vol. 20,1986, pp. 49-54.
6. T. Agui, Y. Nagao, and M. Nakajma, “An Expression Method of Cylindrical Cloth Objects-An Expression of Folds of a Sleeve using Computer Graphics,” Trans. SOC. of Electron- ics, Information and Communications, Vol. J73-D-11, No. 7, 1990, pp. 1,095-1,097. (In Japanese.)
7. B.K. Hinds and J. McCartney, “Interactive Garment
pp. 333-334.
September 1996
Design,” Visual Computer, Vol. 6,1990, pp. 53-61. 8. B.K. Hinds, J. McCartney, and G. Woods, “Pattern Devel-
opments for 3D Surfaces,” Computer-AidedDesign, Vol. 23,
9. C.R. Calladine, “Gaussian Curvature and Shell Structures,” Proc. Con5 on Mathematics of Surfaces, 1984, pp. 179.196.
10. B.K. Hinds and J. McCartney, “Computer Aided Design of Garments Using Digitized 3D Surfaces,” J. Engineering Manufacture: PartB, Vol. 206,1992, pp. 199-206.
11. H. Ng and R.L. Grimsdale, “GEOFF-A Geometrical Edi- tor for Fold Formation,”Lecture Notes in Computer Science Vol. 1024: ImageAnalysisApplicatio~ and Computer Graph- ics, R. Chin et al., eds., Springer-Verlag, Berlin, 1995, pp. 124.131.
12. H. Ng, Fast Techniques for the Modeling and Visualization of Cloth, doctoral dissertation, Centre for VLSI and Comput- er Graphics, University of Sussex, UK, May 1996.
13. C. Feynman, Modeling the Appearance of Cloth, master’s thesis, Dept. of EECS, Massachusetts Inst. of Technology, Cambridge, Mass., 1986.
14. D. Terzopoulos et al., “Elastically Deformable Models,” Computer Graphics (Proc. Siggraph), Vol. 21, No. 4, July 1987, pp. 205-214.
15. D. Terzopoulos and K. Fleischer, “Deformable Models,” Visual Computer,Vol. 4,1988, pp. 306-331.
16. M. Aono M., “A Wrinkle Propagation Model for Cloth,” Proc. CGInt’l, Springer-Verlag, Berlin, 1990, pp. 95-115.
17. Y. Sakaguchi, M. Minoh, and K. Ikeda, ‘‘PARTY: Physical Environment of Artificial Reality for Dress Simulation (1)- ADynamically Deformable Model of Dress,” Trans. SOC. of Electronics, Information and Communications, Dec. 1991, pp. 25-32. (In Japanese.)
18. N. M-Thalmann and Y. Yang, “Techniques for Cloth Ani- mation,” inNew Trends inAnimation and Visualization, N. M-Thalmann and D. Thalmann, eds., John Wiley & Sons,
19. B. Lafleur, N. M-Thalmann, and D. Thalmann, “Cloth Ani- matingwith Self-collision Detection,” in Modelingin Com- puter Graphics, T.L. Kunii, ed., Springer-Verlag, Berlin, 1991, pp. 179-187.
20. M. Moore and J. Wilhelms, “Collision Detection and Response for Computer Animation,” Computer Graphics (Proc. Siggraph), Vol. 22, No. 4, Aug. 1988, pp. 289-298.
21. Y. Yang and N. Magnenat Thalmann, “An Improved Algo- rithm for Collision Detection in Cloth Animation with Human Body,” Proc. ofPacific Graphics, World Scientific Press, Singapore, 1993, pp. 237-251.
22. M. Carignan et al., “Dressing Animated Synthesis Actors with Complex Deformable Clothes,” Computer Graphics (Proc. Siggraph),Vol. 26, No. 2, July 1992, pp. 99-104.
23. H.M. Werner, N. Magnenat Thalmann, and D. Thalmann, “User Interface for Fashion Design,”Proc. IFIPInt’l Conf. on Computer Graphics, North-Holland, Amsterdam, 1993, pp.
24. Y. Yang, N. Magnenat Thalmann, and D. Thalmann, “Three-Dimensional Garment Design and Animation-A New Design Tool for the Garment Industry,” Computers in Industry, Vol. 19,1992, pp. 185-191.
25. N. Magnenat Thalmann, “Tailoring Clothes for Virtual Actors,” in Interactive with Virtual Environments, L. Mac- Donald and J. Vince, eds., John Wiley & Sons, UK, 1994, pp. 205-216.
NO. 8, AUg. 1991, pp. 583-592.
UK, 1991, pp. 243-256.
197-204.

26. Y. Yang, Cloth Modeling and Animation Using Viscoelastic Surfaces, doctoral dissertation, MIRAlab, Univ. of Geneva, 1994.
27. P. Volino, M. Courchesne, and N. Magnenat Thalmann, “Versatile and Efficient Techniques for Simulating Cloth and Other Deformable Objects,” Proc. Siggraph, ACM Press, NewYork, 1995, pp. 137-144.
28. P. Volino and N. Magnenat Thalmann, “Efficient Self-col- lision Detection on Smoothly Discretized Surface Anima- tions using Geometrical Shape Regularity,” Proc. Eurographics, Blackwell, UK, 1994, pp. 155-166.
29. D.E. Breen, D.H. House, and P.H. Getto, “APhysical-Based Particle Model of Woven Cloth,” Visual Computer, Vol. 8,
30. W.T. Reeves, “Particle Systems-A Technique for Model- ing a Class of Fuzzy Objects,” Computer Graphics (Proc. Sig- graph), Vol. 17, No. 3, July 1983, pp. 91-108.
31. D.E. Breen, D.H. House, and M.J. Wozny, “Predicting the Drape of Woven Cloth Using Interacting Particles,” Proc. Siggraph, ACM Press, New York, 1994, pp. 365-372.
32. G. Anderson, “A Particle-Based Model of the Draping Behavior of Woven Cloth,” internal report, Edinburgh Par- allel Computer Center, Univ. of Edinburgh, UK, Sept 1993.
33. H. Okabe et al., “Three-Dimensional Apparel CAD System,” Computer Graphics (Proc. Siggraph), Vol. 26, No. 2, July
34. H. Imaoka et al., “Prediction of 3D Shapes of Garment from 2D Paper Patterns,”Sen-i Gakkaishi, Vol. 45, No. 10,1989, pp. 420-426. (In Japanese.)
1992, pp. 264-277.
1992, pp. 105-110.
35. H. Okabe, Personal communication, Feb. 1993. 36. L. Li, M. Damodaran, R.K.L. Gay, “A Quasi-Steady Force
Model for Animating Cloth Motion,” Proc. IFIP Int’l Conf. on Computer Graphics, North-Holland, Amsterdam, 1993,
37. L. Li, M. Damodaran, and R.K.L. Gay, “Physical Modeling for Animating Cloth Motion,” in Computer Graphics: Devel- opments in Virtual Environments (Proc. CGI), R. Earnshaw and J. Vince, eds., Academic Press, UK, 1995, pp. 461-474.
38. L. Li, Modeling and ComputerAnimation ofcloth Motion in AirFlow, doctoral dissertation, School ofApplied Science, Nanyang Technological Univ., Singapore, June 1994.
39. L. Li, M. Damodaran, and R.K.L. Gay, “Aerodynamic Force Models for Animating Cloth Motion in Air Flow,” Visual Computer, Vol. 12,1996, pp. 84-104.
40. X. Provot, “Deformation Constraints in a Mass-spring Model to Describe Rigid Cloth Behavior,” Proc. of Graphics Inter- face, 1995, pp. 147-154.
pp. 357-363.
41. X. Provot, Personal communication, April 1995. 42. H.N. Ng, R.L. Grimsdale, and W.G. Allen, “A System for
Modeling and Visualization of Cloth Materials,” Comput- ers and Graphics, Vol. 19, No. 3,1995, pp. 423-430.
43. I.J. Rudomin, Simulating Cloth using a Mixed Geometry- Physical Method, doctoral dissertation, Dept. of Computer and Information Science, Univ. of Pennsylvania, 1990.
44. T.L. Kunii and H. Gotoda, “Singularity Theoretical Model- ing and Animation of Garment Wrinkle Formation Process,”Visual Computer,Vol. 6, No. 6,1990, pp. 326-336.
45. T.L. Kunii and H. Gotoda, “Modeling and Animation of Gar-
ment Wrinkle Formation Processes,” Proc. Computer Ani- mation, Springer-Verlag, Berlin, 1990, pp. 131-147.
46. F. Taillefer, “Mixed Modeling,” Proc. Compugraphics, 1991,
47. N. Tsopelas, “Animating the Crumpling Behavior of Gar- ments,” Proc. 2nd Eurographics Workshop on Animation and Simulation, Blackwell, UK, 1991, pp. 11-24.
48. S.G. Dhande et al., “Geometric Modeling of Draped Fabric Surface,”Proc. IFIPlntl Con& on Computer Graphics, North Holland, Amsterdam, 1993, pp. 349-356.
49. J.R. Collier et al., “Drape Prediction by Means of Finite-Ele- ment Analysis,”J. Textile Institute, Vol. 82, No. 1,1991, pp.
50. B. Chen and M. Govindaraj, “A Physically Based Model of Fabric Drape Using Flexible Shell Theory,” Textile Research
51. L. Gan and N.G. Ly, “A Study of Fabric Deformation Using Nonlinear Finite Elements,” Textile Research J., Vol. 65, No.
52. T.J. Kang and W.R. Yu, “Drape Simulation of Woven Fab- ric by Using the Finite-Element Method,” J. ofthe Textile Institute,Vol. 86, No. 4,1995, pp. 635-648.
53. J. Ascough, H.E. Bez, andA.M. Brick, “A Simple Beam Ele- ment, Large Displacement Model for the Finite Element Simulation of Cloth Drape,”J. TextileInstitute, Vol. 87, Part
pp. 467-478.
96-107.
J., Vol. 65, NO. 6,1995, pp. 324-330.
11,1995, pp. 660-668.
1, NO. 1,1996, pp. 152-165.
Hing N. N g is a technical specialist a t CentroDigital Pictures, HongKong. He received his PhDfrom the Univer- sity of Sussex, Center f o r VLSI and Computer Graphics, in May 1996. In his dissertation, he developed two fast techniques f o r visualizing cloth. His
research interests include computer animation, physical- ly based modeling, multimedia, and VR. He is a member ofACM, IEEE, and a n associate member of IEE.
Richard L. Grimsdale is aprofes- sor of electronic engineering a t the University of Sussex, and founder of the Center f o r VLSI and Computer Graphics. His research interests are in rendering, expert systems in comput- er graphics, animation, and VLSI
architectures f o r graphics accelerators. He obtained his Ph.D a t Manchester University where he designed the first transistor computer and contributed to theAtlas Machine. He is a chartered engineer and fellow of the Institution of Electrical Engineers, British Computer Society, and Euro- graphics Association.
Readers may contact Ng at HKlTC #601, 72 Tat Chee Avenue, Kowloon Tong, Hong Kong, e-mail krates@ centro.com.hk.
IEEE Computer Graphics and Applications 41