Computer Animation of Soft Tissues - Brno University of...
39
BRNO UNIVERSITY OF TECHNOLOGY FACULTY OF INFORMATION TECHNOLOGY Department of Computer Graphics and Multimedia Study program INFORMATION TECHNOLOGY COMPUTER ANIMATION OF SOFT TISSUES PO ˇ C ´ ITA ˇ COV ´ A ANIMACE M ˇ EKK ´ YCH TK ´ AN ´ I Ph.D. Thesis Summary by Ing. Martin Dobˇ s´ ık Supervisor: Doc. Dr. Ing. Pavel Zemˇ c´ ık Date of state doctoral exam: 24.9.1999 Date of thesis submission: 31.5.2005 Thesis is available at: the library of the FIT, BUT and at http://www.fit.vutbr.cz/
Transcript of Computer Animation of Soft Tissues - Brno University of...

BRNO UNIVERSITY OF TECHNOLOGYFACULTY OF INFORMATION TECHNOLOGY
Department of Computer Graphics and Multimedia
Study programINFORMATION TECHNOLOGY
COMPUTER ANIMATION OF SOFT TISSUESPOCITACOVA ANIMACE MEKKYCH TKANI
Ph.D. Thesis Summary
by
Ing. Martin Dobsık
Supervisor: Doc. Dr. Ing. Pavel ZemcıkDate of state doctoral exam: 24.9.1999Date of thesis submission: 31.5.2005Thesis is available at: the library of the FIT, BUT
and at http://www.fit.vutbr.cz/

Abstract
Although the computer graphics (CG) and computer animation (CA) are rel-atively new scientific disciplines, they have gained strong and stable posi-tion within computer sciences (CS). It is partly because the main channelof computer-human communication is visual. The exploration of possibilitiesto involve computers in modeling and animation of living creatures, such ashuman beings are, by the means of three-dimensional (3D) models realisticallyrepresenting the figure of living creature started with growing development invisualization techniques of CG. These models usually exploit the anatomy ofreal body at least in two aspects and thus divide the whole modeling and an-imation process into two sub-problems: modeling and animation of skeletalsystem and modeling and animation of body surface deformation. These twosub-problems are usually treated independently and this thesis deals only withthe later one.
Despite the extreme complexity of living creatures, many human body ani-mation models use very simplified geometrical abstraction of body surface andits deformation. This inevitably leads to skin deformations and movementdynamics, which is contrary to what we observe in reality. Therefore, recentresearch in this field has focused on modeling methods based on physical realityand inclusion of biomechanical knowledge. At present, there is great spectrumof different physically-based models for soft object’s and human soft tissue’s de-formation animation. They were often designed for very specific purposes withvery different demands thus they are very different and often incompatible.
This work proposes soft tissue model, which tries to make step towardssoft tissue animation applicable to wide spectrum of human body animationproblems including real-time and photorealistic rendering systems. Model ofincompressible soft object, which is extension of Elastically Deformable Modelproposed by Terzopoulos et al. 1987, is presented first. It is later used as basicbuilding block for soft tissue models of active skeletal muscle and tendon. Set ofexperiments was run in experimental animation system to quantitatively eval-uate following properties of proposed animation models: spatial discretizationindependence, incompressibility, and accuracy of static and dynamic biome-chanical behavior.
Face of human being is exceptional in comparison with other body parts.There is only one movable joint in the skull and large number of muscles accu-mulated in small facial area. Therefore, specially designed models are usuallyused to perform animation of face. It is, actually, one of the potential applica-tions of proposed musculotendon model. This work, therefore, briefly presentsalso authors contribution in this area.
i

Contents
1 Introduction 1
2 Computer Animation of Human Body (State of the Art) 32.1 Character Animation . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Physically-Based Soft Object Animation . . . . . . . . . . . . . 9
3 The Volume Preserving Soft Object Model 113.1 Original Model – Continuous Formulation . . . . . . . . . . . . 113.2 The Damping Term . . . . . . . . . . . . . . . . . . . . . . . . . 123.3 Incompressibility . . . . . . . . . . . . . . . . . . . . . . . . . . 133.4 External Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.5 Discretization in Space . . . . . . . . . . . . . . . . . . . . . . . 153.6 Solution of Equations of Motion in Time . . . . . . . . . . . . . 17
4 Biomechanically-Based Muscle Model 184.1 Zajac’s Musculotendon Model . . . . . . . . . . . . . . . . . . . 184.2 Building the Musculotendon Model . . . . . . . . . . . . . . . . 20
5 Results 215.1 Shape and Material Properties . . . . . . . . . . . . . . . . . . . 215.2 Volume Preservation . . . . . . . . . . . . . . . . . . . . . . . . 235.3 Biomechanical Properties of Musculotendon . . . . . . . . . . . 245.4 Stability of Integration Methods . . . . . . . . . . . . . . . . . . 25
6 Conclusions 27
References 33
Author’s Publications 34
Curriculum Vitae 36
ii

1 Introduction
Motivation. Although first digital computers emerged about half centuryago, they have spread into so many fields of our everyday life that we can hardlyavoid their usage. Contemporary computer-human interfaces try to use theobjects, which are natural to human observer as the means of communication.The need for displaying graphical information, which is easy to be understoodand used, led later into establishing of stand-alone scientific field of ComputerGraphics (CG). Later, the discipline, which investigates the means of “bringingstill computer images to life” – computer animation (CA) – have been found.
Similar way as computers and CG, also CA is becoming more and morecommon in our lives. Moreover, computer animated virtual characters havepopulated places such as computer/video games, virtual reality applications,teleconferencing, films, commercials, but also other scientific disciplines suchas design, architecture, ergonomics, textile industry, medicine, biomechanics,and many others and they are becoming almost indistinguishable from realhumans in some cases. The CA exploits the same basic principle as traditionalhand drawn animation in animated sequence production. It presents very fastchanging sequence of still images to the viewer, in order to create an illusionof movement in his/her mind. In traditional animation, the animator drawscharacters shape in several key poses as it is supposed to evolve in time andsecondary animators draw the character’s shape for all frames of film tapeneeded. CA has used the same way of animation creation in its beginningand automatic computation of “in-between” shapes has been one of the firstsignificant computer help.
The CA techniques have developed greatly since that time into the stagewhen human body is being modeled as precise 3D geometric model exactlyrepresenting body shape, color, and texture. Most of the present human bodyanimation models bring at least two aspects from real human anatomy. Theymodel at least to layers: layer of underlying skeletal system, on whose levelthe global motion is usually specified and the layer of skin model together withmethods allowing to deform skin according to current skeletal posture. Latestachievements in the field show that in order to achieve high realism of bodyshape and motion, it is necessary to consider anatomical and biomechanicalknowledge as much as possible. For this reason, some authors have includeddetailed models of underlying organs. The most important organs from ourCA perspective are those, which have some effect on the skin deformation– skeletal muscles, tendons, and fatty tissues. Different approaches for theirmodeling and animation have been used. From purely geometric, throughmodels including some physically-based components, up to the 3D physically-based models incorporating anatomical and biomechanical knowledge.
1

Thus the role of modeling and animation of soft tissues itself plays nowadaysimportant role in whole body modeling for CA purposes. Since the majorityof animation systems were developed independently from the others, usuallyfor some special purposes, huge variety of soft tissue animation/deformationmodels of various complexity levels now exist, which are mostly completelyincompatible. The specific application areas have contradictory requirementson the animation models. For example real-time animation systems try toachieve the high speed of computation by neglecting “unimportant” detailswhile photo-realistic systems attempt to achieve high quality outputs withoutpaying much attention to the speed of computation.
This thesis focuses specifically on physically-based animation (PBA) of softtissues of muscle and tendon. The aim of this work is to find model which canbe used on several levels of detail in variety of application areas, with varietyof requirements.
Although, the thesis bring some biomechanical knowledge into the proposedmusculotendon model, it does not aim to deal with precise biomechanical sim-ulation, but rather it proposes model suitable for CA of human body, whichtakes into account some biomechanical limitations of living tissues. Therefore,the main concern is realistic result visually pleasing the observers eye and notprecise numeric simulation. Despite the close link of CG and CA, most ofthe CA techniques can be treated independently on its visualization (renderingmethod) and it is the case of this thesis. It will be concerned mostly with themethods for producing movement of soft tissues, not their visualization.
The Goal of the Thesis. Main goals of this thesis can be outlined in moredetail as follows:
• Design new model for physically-based animation of volume preservingsoft object (VPSOM) with scalable spatial resolution, which can serve asa basement for physically based soft tissue modeling and animation.
• Extend proposed VPSOM by incorporating biomechanical properties ofsoft tissues into it and thus create model of musculotendon unit capableof exerting active forces on surrounding environment.
The following set of subsequent goals was also set:
• Choose appropriate method for integration of differential equations of mo-tion for proposed model.
• Evaluate the proposed models with respect to spatial resolution scalabilityand validity of biomechanical properties.
• Make steps towards the incorporation of proposed models into more com-plex human body animation system.
2

2 Computer Animation of Human Body
Brief review, concerning the important streams and methods relevant to thisthesis is provided in the following text.
2.1 Character Animation
Rich variety of different human body modeling and animation techniques existtoday. Many authors have tried to categorize them in several different ways.In scope of this thesis two key aspects of human body modeling and anima-tion are most relevant. First is the representation of layer which transmits thechanges of skeleton configuration to skin deformation. We distinguish whetherthis layer is purely geometric, or if it involves, even partly, physically-based an-imation/simulation, and we want to know to what extent the models involvebiomechanical or anatomical knowledge. Second aspect important for this the-sis is the way the motion of animated character is specified. In this text we willdistinguish between the animation driven by skeleton motion and animationdriven by actuator activation. We will also call it inverse and forward methodrespectively.
Geometrical Models. First systems for CA of human body either modeledonly rigid skeleton or included also simple representation of skin with simplegeometric skin deformation technique or were even completely modeled usinglocal or global deformation techniques. Deformation techniques were formallyintroduced to CG in the year 1984 in [3]. More general approach called Free-Form Deformation (FFD) have been introduced later in [43], and still laterextended to EFFD in [10]. These techniques were later adapted by many otherauthors specifically for skeleton driven CA of characters. Please, see e.g [31]for an overview of such methods and exemplar application.
One of the very first systems for modeling and animation of human beingsin realistic way was designed by D. Thalmann and N. Magnenant-Thalmann.They have presented their first movie with synthetic characters with title Radez-vous a Motreal in the year 1987 [28]. Deformable skin of synthetic actorswas modeled using skeleton based deformation scheme called Joint-DependentLocal Deformations (JLD) [24], which deform the polygonal skin representationaround skeletal joints according to relatively simple geometric rules.
J. Shen and D. Thalmann in [44] exploited the flexibility of metaball objects(metaball = blobs = implicit surface), which proved to be promising way ofhuman body modeling. For correct skin deformation they modified parametersof some metaballs close to skeleton joints according to joint angles. To speedup visualization of implicitly defined skin they convert the implicit surface into
3

B-spline surface.
JLD operators, hierarchical B-slpines, or metaballs techniques described sofar have all one major disadvantage: they are closely linked to one specificgeometric skin representation. J. Chadwick, D. Haumann, and R. Parent camein 1989 with animation system named CRITTER [7]. They have introducedan intermediate layer between skeleton and skin in the form of lattices of FFDblocks attached to the skeleton and thus allowing any kind of skin representa-tion like polygons or splines to be inlaid inside the FFD lattices. L. Moccozethave introduced new FFD technique called Dirichlet Free-Form Deformations(DFFD) in [31] for the purposes of skin deformation in in hand animation.
Animation methods such as the above presented are mostly designed to workin interactive frame rates in animation editors while off-line rendering is used forfinal rendering of high resolution animation. Thus, these methods can providevery realistic human body animation. The level of realism, however, dependson the animators’ artistic skill. Separate group of techniques used in real-timecharacter animation systems exist, in which the key aspect is speed of charactervisualization. So called skinning is perhaps the most simple technique in thisgroup. It operates usually with simple polygonal representation of skin. Vertexposition of deformed skin is given by weighted linear combination of locallytransformed vertex positions by all bone segments involved. The advantagefor which this technique is still used is that it is very simple to implementand very fast to compute. Otherwise, these techniques suffer series of seriousproblems, for example, weights can never be set so that deformation wouldyield realistic results in all circumstances. Methods in this group are oftencalled Skeleton Subspace Deformation (SSD) because the “control vertex v onthe deforming surface of an articulated object lies in the subspace defined bythe rigid transformations of that point by some number of relevant skeletalcoordinate frames” [26].
In [26] the authors brought new method called Pose-Space Deformation, inwhich deformation interpolation parameter lies generally in some other sub-space not directly defined by skeleton and the skin deformation is defined byblending of predefined set of key shapes. It easily overcomes most of the dif-ficulties of simple SSD methods and yet does not increase the computationalcosts much, thus keeping the possibility of real-time performance.
Some of the results achieved by presented techniques are breathtaking intheir level of convincing – almost life-like – realism. However, these methodsare still not capable to animate creatures like human beings in their tremendouscomplexity of detail. For example human shoulder is one of the most complexarticulations of human body. The animations including shoulder are oftenproduced so, that the authors avoid the poses yielding unrealistic deformationsor the post correction of animation sequences by animator is done [30]. Even
4

Figure 1: The Shoulder Case presents unrealistic deformations produced by geometric sys-tems. (reprinted from [30])
with the most promising PSD method it is almost impossible to model theshoulder joint realistically since very large set of poses is needed. An exampleillustrating this difficulty is presented in Figure 1.
Physically-Based Models. Simulation of physical laws can be helpful toolin achieving realistic deformation and especially the dynamics of motion in CA.Thus, variety of physically-based modeling and animation systems have beendeveloped. Different methods were used for physically-based animation (PBA)of different objects and materials. These methods are reviewed in Section 2.2.This paragraph briefly mentions three important skeleton-based deformationtechniques, which engage some kind of physically-based approach.
One of the first attempts in this field was made by J. P. Gourret et al. in[15]. For the first time in CA the authors have used engineering method ofFinite Elements (FEM) to simulate deformation of objects and human hand ingrasping task. They have achieved very good results, even thought they havemodeled linear compressible material only.
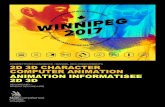
Animation system, which modeled skin as the only component with phy-sically-based characteristics, was published in [48]. The authors attached rigidnon-deformable ellipsoids onto skeleton as representation of internal organs.They modeled skin as mass-spring system1, which is attached to underlying el-lipsoids via another set of springs. Movement of character is driven by skeletonand the dynamics of skin is simulated by integration of differential equations(DE) of motion of mass spring system. The animation could run in interac-tive frame rates for low resolution of skin mesh, but off-line rendering had tobe used for final high resolution images. Scheme of internal arrangement andscreen-shots from resulting animations are shown in Figure 2.
L. P. Nedel et al. have used mass-spring system for real-time animation ofmuscle deformation in [32]. They modeled muscle in two levels: level of action
1Please, see section 2.2 for explanation.
5

SkinFatty tissue
α
SkeletonMuscleConnectivetissue
Controlangles
αi+1
αi-1i
a) b)
Figure 2: LEMAN animation system. (a) layered character construction and skin defor-mation model. (b) screen-shots from animation produced by LEMAN (reprinted from [48])
lines, where the exerted muscle force is computed and the level of geometri-cal model that simulates muscle deformation and volume preservation duringcontraction.
Anatomically and Biomechanically Based Models. PBA took much ofthe burden from the animator away yet increasing the realism of animation viaphysically correct dynamics. However, many problems still remain unsolved be-cause all methods mentioned so far do not model real physiological propertiesand limitations of living tissues which are given by anatomical arrangementsof organs and structure of living materials. Thus incorrect artifacts, such asunrealistic skeletal joint angles, too fast acceleration of hand movement, unre-alistic muscle bulging, or speed of muscle contraction can appear. Researchesrecognized this problem and made attempts to solve it. Two main streamswhich resulted from this endeavor can be identified.
Works fitting to the first stream put emphasis on anatomically accuratemodeling of geometry and neglect the biomechanical aspects considerably. Thework [54] presents model of monkey in which the authors have modeled anatom-ically accurate skeletal system with muscles represented by discretized de-formable cylinders, internal organs by static ellipsoids and with polygonal skin“anchored” to underlying components. Although this approach does not bringsignificant increase in complexity of model, the idea of “as accurate as possible”geometrical modeling of internal anatomy brought considerable improvementin the realism of skin deformation. In [42] the concept of so called artisticanatomy was introduced into CA. The authors have modeled two differentmuscle shapes: fusiform and general muscle that can bend, using simple ellip-soids and bicubic Bezier patches. These simplified shapes were used in placeswhere muscles exist in real human shoulder anatomy. Although, the skin wasvisualized via implicit surfaces resampled to B-splines, similarly as in previouslymentioned work [44], the anatomically correct positioning and deformation of
6

a) b) c) d) e)
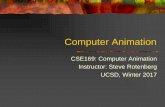
Figure 3: Anatomically-based models for geometric and physical reconstruction ofhumans by Ng-Thow-Hing. (a) B-spline solid fitted to data from VHP in model of soleusand gastrocnemius muscle. (b) Simulation of physically-based B-spline model of musculoten-don. (c) B-spline solid as model of ligaments with biomechanical properties. (d) “Shrink-wrap”used in skin deformation. (d) Muscle fiber orientation measurements (left) and synthesis duringanimation (right). (reprinted from [34])
ellipsoids produced more realistic results.
Because of their faster computation, geometric techniques allow greatermodeling detail in interactive applications than physically-based. However,they still suffer many problems typical to geometric approaches – mainly theimpossibility to capture correct dynamics of deformation. Also thanks to thisfact another stream of biomechanicaly-based CA systems emerged trying tomodel living tissues on the basis of biomechanics2. Pioneering work on thisfield was presented in [8]. The authors combined the power of Finite ElementMethod used in dynamic application, precise geometric model of muscle, and upto date knowledge of biomechanics of muscle contraction in their model. Theyhave created FE mesh to simulate static, linear, isotropic properties of muscletissue and they have incorporated Zajac’s biomechanical model of muscle fiberinto it [58]. They made also one of the first attempts to use whole muscle modelfor activation driven animation. V. Ng-Thow-Hing have developed model ofmuscle precise in three aspects – accuracy of geometry, accuracy of biome-chanics, and visual accuracy [34]. He have developed new deformable objectmodeling technique – B-Spline Solid and methods for fitting B-Spline solidsinto the 3D data sets measured from real anatomy. He extended B-spline solidmodel into physically-based volume preserving muscle model capable of sim-ulating muscle contraction. He included muscle fiber orientation visualizationand used B-spline solids to model also ligaments. He made a series of experi-ments on activation based motion specification in limb modeling example andproposed also the skin model. Hings’ work is presented in Figure 3. It certainlyrepresents one of the most detailed and most general modeling approaches de-
2I.e. in physically-based manner with the properties of real tissues included
7

veloped up to date. Anatomical model of whole human body designed forinverse skeleton driven animation was presented in [1]. Models of skeleton,muscles, and skin together with anatomically accurate joint limits were cre-ated. The muscle model comprises of two layers: physically-based mass-springmodel of action lines and the geometry definition. The author uses inversetechniques to estimate the force exerted by muscle in current pose and deformsmuscle based on the estimation. For skin deformation he uses two stage ap-proach of simple skinning technique and “sculpturing” by underlying anatomy.Biomechanical modeling was successfully used also in the field of facial anima-tion. Facial modeling and animation system in which physically-based threelayered mass-spring system was used as model of skin and underlying tissueswas presented in [25]. This model consists of static model of skull includingmovable jaw, skin mass-spring system, and active muscles. Muscles, designedas piecewise linear lines or sheets of actions, are attached to the lowermost layerof masses and have also nonlinear activation dependent behavior. This systemwas successfully used in study where EMG3 recorded data from facial musclesduring speech was used to drive the animation system via muscle activation[27]. Later the authors computed the muscle activations via inverse dynamicapproach directly from optical motion captured data [38]. FEM was used insystem designed to simulate the influence of aesthetic surgery on appearanceof face in [21]. Surface FE in combination with mass-spring system attachingthe skin surface to skull was used. Later, authors included also models of ac-tive muscles, thus allowing for facial animation [20]. They also extended thesurface FEM to volumetric one and presented more interesting results of facialsurgery planning in [22]. Another facial animation system originally designedfor surgery simulation was presented in [14]. Muscle and other surroundingfacial tissue are both modeled as volumetric FE. As a part of his Ph.D. studiesW. Maurel have performed an extensive study of current knowledge in severalfields: musculoskeletal anatomy and biomechanics of the human upper limb,biomechanical constitutive modeling of muscles and soft tissues, and nonlinearcontinuum mechanics and numerical methods necessary for their simulation[30]. Results were summarized also in the book [29]. In his thesis he proposesthe anatomical and biomechanical model of the scapulo-thoracic constraint andthe shoulder joint sinus cones and applies it to the realistic animation of ananatomic musculoskeletal body model using inverse kinematics. This studyprovides perhaps the most comprehensive knowledge base for biomechanically-based computer animation up to this date.
3Electromyography.
8

2.2 Physically-Based Soft Object Animation
In PBA the motion of objects is described by physical laws using means ofmathematical equations and their solution. In this way animator only specifiesthe material properties of animated objects in quantities known from everyday life like mass or friction, sets the initial conditions of animation (suchas velocities of objects in scene), and runs the program which computes thesolution. This advantage, however, brings also some difficulties. First we needsome tools to control what is going on in the scene which is usually tackled bymethod of constraint optimization (see e.g. [39]). Second problem arises oncethe animator wants to create effect which does not satisfy the laws of physicsand it is also often solved via of constraint methods. Subject of this thesis isPBA approximating the physically correct behavior. Methods of controllingthe model will not be discussed here.
Physically-based CA is relatively new phenomenon since it has emergedabout in 1987. However, techniques used on this field are often very wellknown from some other engineering fields. The new, is the idea of their appli-cation to CA. Even in this short course of time, many models of many differentobjects were developed. They can be classified with regard to rigidity of theobjects being modeled into two classes – rigid and soft. These two classes areusually treated separately as their problem description and formulation is verydifferent. The soft objects are those used in soft tissue modeling. Their briefreview follows4.
PBA was used in modeling of variety of different soft objects. Models ofgeneral dynamic deformable objects, fluid like materials, textile materials, softtissues, and many others can be found in the spectrum. However, in all of themwe struggle with similar problems.
Firstly, we need to define material behavior formally using mathematicalequations and we need to find method of discretization and solution of resultingequations. Different formulation of elasticity and discretization of material havebeen used. The pioneering work on the field [46] have used means of differen-tial geometry, integral formulation, variational derivatives and finite differencemethod (FDM). Work [6] have introduced finite element method (FEM) tophysically-based free-form shape design. In [17] the authors have exploitedboundary integral equation formulation of static linear elasticity and boundaryelement method (BEM) for discretization. Finite volume method (FVM) wasused in [45] for incompressible solid implementation and active muscle simula-tion. Continuous variational principle without discretization was used in [53]for variational surface modeling. Many authors have exploited the mass-spring
4It was not possible to provide complete overview of PBA because of the space limitation of this thesissummary. Please, see the full version of this thesis or e.g. [29] for more details.
9

formulation commonly used in computer graphics. It was used mainly for tex-tile animation [4, 9], but also for general deformable objects [47], and soft tissuesimulation [25].
Majority of mentioned works lead to similar set of ordinary differentialequations (ODE), which need to be integrated numerically. Thus, anotherimportant issue in PBA are numerical methods of ODE integration and nu-merical methods for solution of large systems of equations. The ODE beingsolved are almost always numerically “stiff” and very difficult to solve usingordinary explicit methods. Thus, already the pioneering work [46] have intro-duced semi-implicit integration scheme, which allowed to use relatively longintegration time steps, but in the cost of solving linear system of equations ineach time step. Following works (such as [49, 47]) often returned to explicitintegration schemes, because they are easier to implement and faster in com-puting single integration step. Explicit methods, however, force us to makethe time step very small and they are not very stable especially when used inenvironments with collision handling and response. In [2] the authors madea breakthrough on this field when they introduced stable implicit integrationscheme allowing to take large steps without loosing stability properties whileallowing fast real-time computation of large systems. Several similar worksarose soon after this, for example [51, 9].
Because of the need to solve large systems of equations at every time step,current PBA systems are often limited to small number of objects in scenewith coarse spatial discretization. Therefore, another important issue in PBAis speed of computation. Many different methods were used also on this field.First attempt used modal dynamic analysis in FEM to find only the importantdeformation modes [37]. Later the authors have limited the number of free vari-ables by restricting the deformations to specific controllable set of linear defor-mations [57]. Adaptive space and time sampling is another common approach[11, 12, 13, 19]. In the attempt to speed up computation, also special elasticityformulation were developed [17]. Lately, several methods of deformation forreal-time animation, which use some way of deformation pre-computation wereintroduced [18, 23, 16]
Extreme diversity of PBA methods is obvious from the presented incompletelist. These methods have often very few common features. They differ inthe areas of their application, in methods used for elasticity formulation, andin methods of solution of resulting equations. Despite the tremendous effortspent so far method, which would be general enough and fast enough still,does not exist. Therefore, the most of this thesis is devoted to design of newphysically based animation model of soft objects and tissues, which would beeasily scalable and ready to use in various application areas.
10

r0
r
W
W0
a1
a2
a1
a2
y
x
z
undeformed body
body indeformed state
G
G0
Figure 4: Geometric representation of deformable object using material coordinates
3 The Volume Preserving Soft Object Model
Elastically deformable model (EDM) of curves, surfaces and solids was pro-posed by D. Terzopoulos and K. W. Fleischer in [46]. They described thepotential energy of elastic deformation via energy functional derived from dif-ferential geometry and discretized the resulting partial differential equations(PDE) in space using FDM. They have used semi-implicit integration schemefor the solution of resulting second order ODE in time. FDM discretizes thespace domain of object into finite set of spatial points which provides an intu-itive way for model creation in different resolutions. FDM is independent onformulation of internal elastic energy and it also provides simple way to incor-porate the biomechanical properties of muscle and tendon. This advantageswere main reasons for which we have decided to base our deformation modelon the original work [46]. This section presents the original formulation of thedeformable model of elastic solids5, including its discretization using FDM andODE solution. It introduces several extensions, mainly the authors’ incom-pressibility constraint. Finally, it presents authors solution to discretizationindependent material parameters.
3.1 Original Model – Continuous Formulation
The deformable body Ω can be described in its material coordinates a =[a1, a2, a3]. The Euclidean coordinates of point in Ω is then r(a, t) = [r1(a, t),-r2(a, t), r3(a, t)]. We will denote body in its natural undeformed state asr0(a) = [r0
1(a), r02(a), r0
3(a)]. The situation is described in Figure 4. Using thisnotation, the motion of all points r(a, t) in Ω can be described in Lagrange’s
5We will restrict to the case of solids only in this text, because of the lack of space. The reader is kindlyreferred to full text of thesis or to original paper [46] for details on curve and surface formulation.
11

form [35] as:
µ∂2r
∂t2+ γ
∂r
∂t+δε(r)
δr= f(r, t), (1)
where: µ(a) is mass density , γ(a) is damping density and f(r, t) are externalforces. ε(r) is a functional measuring potential energy of elastic deformation.The authors of [46] have used differential geometry to measure the amount ofdeformation. The fundamental theorem of solids6 says that “two 3D solids havethe same shape if their metric tensors G are identical functions of a”. So wecan use the metric tensor (or first fundamental form) in current state G andmetric tensor in rest state G0 to define the functional of potential energy ofdeformation:
ε(r) =
∫∫∫Ω
∥∥G−G0∥∥2
ηda1da2da3, where Gij(r(a, t)) =
∂r
∂ai· ∂r∂aj
(2)
where symbol ‖·‖η denotes the weighted matrix L2 norm which involves theweighting functions ηij(a1, a2, a3). This functional provides zero energy forbody in rest shape and growing energy with growing amount of deformation.
In [39] authors quote that simulation of physically-based system is actu-ally an optimization procedure. In our case we are looking for function r(a)minimizing the functional ε(r). The authors of original model have used ap-proximation of variational derivative of equation (2) in form7
δε(r)
δr≈ e(r) =−
3∑i,j=1
∂
∂ai
(αij
∂r
∂aj
)(3)
where αij(a, r) = ηij(a)(Gij −G0ij) are constitutive functions describing elastic
properties of material. The term δε(r)δr actually represents the elastic forces of
deformation.
3.2 The Damping Term
The authors of [46] have used constant damping term γ in their original modelin equation (1). Constant damping, however, dissipates the energy no matterwhere it comes from by the same amount. The result is, for example, thatthe global movement of muscle during free fall will be dissipated the same wayas the shortening of muscle at the same speed. Therefore we have chosen toaugment proposed model with the dissipative function which was used in [5].
6Please, see e.g. [41] for details.7Please, see [46] or full text of this thesis for details on derivation.
12

The term E = G − G0 is also known as Lagrangian strain tensor [5] andit measures the “amount of deformation”. Differentiation of this tensor withrespect to time E = dE/dt yields the measure of “speed” at which deformationoccurs:
Eij(r(a),v(a)) =d
dt
(∂r
∂ai· ∂r∂aj
− ∂r0
∂ai· ∂r
0
∂aj
)=∂v
∂ai· ∂r∂aj
+∂r
∂ai· ∂v∂aj
(4)
Using this quantity we can define functional
ν(r) =
∫∫∫Ω
∥∥∥E∥∥∥2
ϕda1da2da3 (5)
which can be considered as measure of “total speed of deformation”. The“speed of deformation” can be minimized by taking its variational derivativewith respect to velocity [5]. Keeping only first order terms yields:
δν(r)
δv≈ −
3∑i,j=1
∂
∂ai
(γij
∂r
∂aj
)(6)
where γij(a, r) = ϕij(a)(Eij) is a constitutive function defining the amount
of dissipation in material. Term δν(r)δv can be added to the left hand side of
equation (1) to represent more physically accurate damping whose amount isset through functions ϕij.
3.3 Incompressibility
The model presented so far approximates the “Hookean” elastic material, whichcan be easily compressed or extended. Aim of this work is to create animationmodel of soft tissues which are quasi-incompressible8 [29]. Thus, some addi-tional constraints need to be added to the model in order to maintain “almostconstant” volume.
Different modeling methods usually require different way of imposing dif-ferent kind of constraints. In [39] an overview of constraint methods whichadd external forces to physical system was provided. Methods allowing exactconstraint preservation exist, for example the one proposed in [56]. However,their straightforward application to incompressibility constraint leads to thecomputation of large Jacobian matrices of complicated functions, which arenot easy to compute in reasonable time. Therefore, we have decided to usepenalty method9 similarly as for internal elastic forces and dissipation forces.
8By quasi-incompressible we mean “almost incompressible” in this context.9Please, see [39] for definition of this term.
13

So we define an energy functional κ(r), which returns value 0 for configu-rations r in which current volume V (r) does not differ from volume V 0, whilethe value of functional increases as the difference |V − V 0| increases:
κ(r) =
∫∫∫Ω
ψ(dV − dV 0)2da1da2da3 where dV =
∣∣∣∣ ∂r∂a1· ∂r∂a2
× ∂r
∂a3
∣∣∣∣ (7)
is the differential volume element at point r(a) and dV 0 is volume of the sameelement in rest shape. ψ(a) is the weighting function.
The functional κ(r) can be minimized the same way as in case of elastic en-ergy and dissipation energy by variational derivative. Minimization procedureof proposed functional yields the volume preserving forces in the form:
δκ(r)
δr= k(r) = − ∂
∂a1t1 +
∂
∂a2t2 −
∂
∂a3t3 (8)
where
t1 = 2ψ(dV − dV 0)
(∂r
∂a2× ∂r
∂a3
), t2 = 2ψ(dV − dV 0)
(∂r
∂a1× ∂r
∂a3
),
t3 = 2ψ(dV − dV 0)
(∂r
∂a1× ∂r
∂a2
).
This expression can be directly added into equation of motion (1) to yield:
µ∂2r
∂t2+ γ
∂r
∂t+δν(r)
δv+δε(r)
δr+δκ(r)
δr= f(r, t). (9)
The term (8) introduces extra internal forces to the model trying to pushit into such deformation which preserves the volume. As a consequence ofthis formulation the volume of object during deformation will not be exactlyconstant. However, we will see in section 5 that the deviation of volume isreasonably small and decreases with increasing resolution.
3.4 External Forces
Simple simulation environment MDDAnim have been implemented in order toverify proposed soft object animation model. The VPSOM is passive10, andwill not start to move until it will be exposed to influence of external forces.Thus, several simple externally applied forces have been added in order to toverify proposed VPSOM. They are simply summed into net external force andadded to the right hand side term f(r, t) of equation of motion (9).
10I.e. it only passively reacts to exerted external forces.
14

Gravitational force f gravity(a) = µ(a)g, where g is the gravitational field,acts on all points of deformable body. Simple linear (Hookean) spring definedby its stiffness k and rest length l0 can be attached to any point r(ainsertion) andfixed point in space O. Three other types of force generators also attachableto any point in the object af have been added solely for testing purposes. Thegenerators apply force in the direction of prescribed vector vdir and intensity ofapplied force is driven by one of the three implemented functions: box, triangleand sinus. The simulation environment MDDAnim allows direct visualization ofsimulation and the user can point out any point on the deformable body andattach interactive spring with zero rest length to it. The free end point of theattached spring is then moved by the mouse cursor. External forces such asthose mentioned in original work [46] or any other can be easily included.
3.5 Discretization in Space
The equation (9) which includes internal elastic forces (3), dissipation forces(6), and volume preserving forces (8) is partial differential equation of secondorder in space11 and time. Thus, we are solving initial-boundary-value problemexpressed by this equation. We use FDM to discretize it in space domain first.
Finite Difference Method. Basic idea behind the FDM is that insteadof working in continuous domain of interest Ω, we choose finite set of nodalpoints on Ω, which we call grid, and replace the partial derivatives of involvedfunctions in grid nodal points by Finite Difference quotients (FD).
Application of FD to our force equations means to discretize function r(a)on the domain Ω of material coordinates a. In case of 3D parametric model wecreate M ×N ×O nodal points on the parametric space 0 ≤ a1, a2, a3 ≤ 1 withinter-node spacing h1 = 1/(M − 1), h2 = 1/(N − 1) and h3 = 1/(O− 1). Thuswe approximate continuous vector function r(a1, a2, a3) by the grid functionr[m,n, o] = r(mh1, nh2, oh3), where 0 ≤ m ≤ (M − 1), 0 ≤ n ≤ (N − 1), and0 ≤ o ≤ (O − 1).
To evaluate the force approximation functions (3), (6), and (8) we needdiscrete approximation of first and second partial derivatives of nodal variableswith respect to parameters ai – difference operators (DO). Large number ofDO are used in theory and practice of FDM. However, as previous work [36]and also our investigation and experience shows, the simplest one are mostappropriate due to the nature of equations we are solving. We use the sameDO as are proposed in original work [46] and justified in [36]: first order forward(FW) and backward (BK) DO and central and cross DO; with natural (free)
11It is DE of 4th order in space for case of surfaces.
15

a) b) c) d)
Figure 5: Material properties depend on spatial resolution in original formulation [46]. Imagesshow the solid with parameters ηij = 0.01, ϕij = 0.001 and m = 4 discretized to resolutions:3 × 3 × 3 (b), 4 × 4 × 4 (c), and 5 × 5 × 5 (d). Topmost plane is fixed in space. (a) is solidin rest state. Figures (b)–(d) show solid after reaching equilibrium. Gravity is introduced attime t = 0.
boundary conditions. For example first order forward and backward DO in a1are defined as:
D+1 (r)[m,n] = r[m+1,n]−r[m,n]
h1, D−
1 (r)[m,n] = r[m,n]−r[m−1,n]h1
,
and higher order central and cross DO are derived using their combination.Direct substitution of these DO into equations (3), (6), and (8) yields thediscrete approximation of elastic, damping, and volume preservation forces.Please, see the full version of this thesis, section 3.5.1 – 3.5.2 for full specificationof DO and resulting discrete approximation functions.
Resolution Independent Material Parameters. Equations describingelastic (3), dissipative (6), and volume preserving (8) forces define the materialproperties through the weighting functions ηij(a), ϕij(a), and ψ(a). This wayof material properties specification, however, suffers one major disadvantage.Discretization of above mentioned expressions yields, unfortunately, differentmaterial behavior under different spatial resolution of discretization as it isillustrated on figure 5.
So, we introduce new discrete functions λij[m,n, o] which are user definedand which will define the stiffness material properties in ij directions indepen-dently on resolution. From these functions we derive ηij[m,n, o] and substituteit into the discrete constitutive functions. The formulas are12:
η11[m,n, o] =λ11[m,n, o]
(M − 1)NO
η22[m,n, o] =λ22[m,n, o]
M(N − 1)O
η33[m,n, o] =λ33[m,n, o]
MN(O − 1)
η12[m,n, o] = η21[m,n, o] =η11[m,n, o] + η22[m,n, o]
2
η13[m,n, o] = η31[m,n, o] =η11[m,n, o] + η33[m,n, o]
2
η23[m,n, o] = η32[m,n, o] =η22[m,n, o] + η33[m,n, o]
2
(10)
12Please, see full text of this thesis for derivation.
16

Similarly, we propose the resolution independent functions ωij[m,n, o] fordamping parameters specification, from which functions ϕij[m,n, o] are de-rived. They are of the same form as (10), except symbols η are replaced by ϕand λ by ω.
3.6 Solution of Equations of Motion in Time
After discretization in space using FDM, we collect the nodal variables com-prising grid functions r[m,n, o] and e[m,n, o] into 3MNO dimensional vectorsr and e (for example 2D model discretized into 2×3 = 6 nodal points would be
written as r = [r[1, 1] r[1, 2] r[1, 3] r[2, 1] r[2, 2] r[2, 3]]T ). To simplify notationwe will refer to one element r[m,n, o] of vector r as ri and similarly for otherquantities. Then we can rewrite (9) into set of 3MNO “independent” ordinarydifferential equations of this form
miri + ciri + ei(r, ˙r) = f i(r, t) (11)
where ˙r and ¨r means first and second time derivative of the vector r, i.e. thefirst and second time derivative of its components ri = ∂ri
∂t and ri = ∂2ri
∂t2 . Termmi is the mass in nodal point ri, similarly ci is constant damping13 at thesame nodal point. The term ei(r, ˙r) = e[m,n, o] represents discrete version ofelastic, damping and volume preserving forces from equations (3), (6), and (8).f i are externally applied forces.
The equation (11) can be converted from second order ODE into two ODEof first order by rearranging and substitution:
vi = ai(t, r, v) =1
mi(f i(r, t)− civi − ei(r, v)) (12a)
ri = bi(t, v) = vi (12b)
Large variety of integration methods have been developed to solve first orderDE of this form. We have implemented and tested following explicit methods :Euler’s, Verlet’s, Runge-Kutta 2nd and 4th order, Runge-Kutta 5th order withstep-size control, Bulirsch-Stoer with step-size control, Adams-Bashforth multi-step, and Adams-Moulton predictor-corrector. From implicit methods we haveimplemented and tested the original mathod proposed in [46] and backwardEuler’s step from [2]. Please, see for example [40] for details on these methodsand section 5 for the comparison of their application to the problem solvedhere.
Whether to use implicit or explicit method is not always obvious from thefirst look and depends heavily on the problem being solved. Both methods
13Physically “more correct” damping is included in term ei(r, ˙r), but we still include constant damping ciri
into equation of motion, for reasons described in the full text of thesis.
17

have its use during development. Explicit methods are useful to check ourthoughts and derivations during development via observing preliminary resultsfast, while implicit methods are worthy of implementation for system whichwill not be changed very often because it can benefit from their advantagesand the benefits will “pay back” the time invested to implementation. Currentstate-of-the-art works such as [2, 51, 50, 9] suggest that implicit methods arethe future of PBA, mainly because of their stability.
4 Biomechanically-Based Muscle Model
Human body is composed of hundreds of muscles of different kind. Our aim isto model muscles which serve as a motor actuators of body movement. We havechosen to model the linear muscle with pennation14 since it is very commonskeletal muscle and is very well described by number of different biomechanicalmodels.
4.1 Zajac’s Musculotendon Model
The smallest element of muscle on whose level we describe the shortening pro-cess, is called sarcomere. It is a small longitudinal element about 1µm long.Hundreds of sarcomera are arranged in parallel along its length. They formpatterns which are connected in series to compose myofibril, which is long ele-ment running along the length of muscle fiber. The order of tens to hundredsof myofybrils can be found in single muscle fiber. The fiber usually runs alongwhole length of muscle and is about 10 to 100µm in diameter. Fibers are ar-ranged into bundles called fasciculi and connected with connective tissue toform all together the muscle bely. The connective tissue penetrates the muscleand outside the muscle bely forms tendons, which connect the muscle to bones.Whole muscle holds in place thanks to extensive connective tissue layers calledfascia. Muscle fibers may not be exactly parallel to tendons, but they areconnected to it rather in some angle called angle of pennation.
Zajac’s dimensionless musculotendon model is designed for completemusculotendon unit. It means that it models muscle together with tendon.Figure 6a) shows the model schematically. Characteristics of interest are length,force, and speed. They are all described without dimensions and instead oftheir direct use, Zajac used their normalized version. For example from actualtendon length lT we get its normalized equivalent using lT = lT
lTS. Zajac measured
mechanical characteristics of isolated muscle fiber and tendon. They can beeasily scaled to simulate complete muscle. The five important parameters which
14Please, see the full text of theses or [29] for example, for more details on muslce anatomy.
18

~MlM
~TlT~M cos αlM cos α
~MTlMT
~SEkSE
CE ~TFT
~PEkPE α~MkT~TFT
a(t) ... activation signal
(a)
(b)
Velocity
Forc
e
F0
vMmax
(c)
Length
Forc
e
F0
l0(d)
Figure 6: Zajac’s model: (a) the scheme of mechanical arrangement; (b) passive tendon stress(kT ) depending on tendon strain; (c) velocity dependence of active exerted force; (d) dashedline – active muscle force (CE), dotted line – passive muscle force (kPE), solid line – active +passive.
describe the model are: α . . . pennation angle; FM0 . . . maximum isometric force
of active muscle; lM0 . . . optimal muscle length at which FM0 is developed; lTs
. . . tendon rest length; vMmax . . . maximum shortening velocity of muscle fibers.
Figures 6b) to 6d) describe their meaning.Based on mechanical arrangement from Figure 6a), the force generated by
musculotendon can be expressed as:
F T = FM cosα =(FM
active + FMpassive
)cosα.
Zajac modeled force, generated by activated muscle, as a function of threenormalized variables: activation, velocity of shortening, and length of musclefibers. This relation can be expressed by equation:
FMactive = a(t)fv(vM)active(lM)
where a(t) is the muscle activation function, fv(vM) is the velocity dependencefrom Figure 6c), and active(lM) is the dashed line from Figure 6d), which is inthis thesis represented as Catmull-Rom interpolation spline15 passing throughthe data points measured by F. E. Zajac. The expressions suggested in [33] areused to model force-velocity relationship fv(vM), passive muscle force fM
passive,
and tendon force fT .This model have already been successfully used in several computer anima-
tion projects (e.g [8, 33, 34]). Reader should kindly refer to full text of thisthesis, materials [29, 8, 55, 58], or any relevant text on biomechanics for furtherdetails about the model.
15Please, see for example [52] for definition of Catmull-Rom spline.
19

active and passiveforce generator
tendon forcegenerator
nodal points anchor
m (a1)
n (a2)o
(a3)
Figure 7: Musculotendon model scheme. Model of active and passive muscle fiber force isadded between every two successive nodal points in the direction of m axis. Muscle is attachedat both ends to fixed plane using tendon models.
4.2 Building the Musculotendon Model
The VPSOM from section 3 is used as a base material for active musculotendonmodel. The rest shape r0(a) of VPSOM can be set freely to any shape, it canbe fitted, for example, to the data measured from real muscles (see e.g. [34]).Two basic shapes of rectangular and round muscle are used for testing purposesin this thesis. The round shape is presented in section 5 in Figure 10.
Active and passive nonlinear muscle forces, defined in previous subsection,are included into model after spatial discretization. The muscle fiber forcegenerators are added between each two consecutive nodal points of discretizedmaterial along the direction of m axes as it is illustrated in Figure 7. Muscleis attached to planar anchor at both ends via nonlinear models of tendons.(M − 1)NO muscle fiber models and 2NO tendon fiber models are addedaltogether.
The aim of this work is to use proposed musculotendon model in morecomplex systems, where the skin is also included. Thus, chosen visualizationmethod, illustrated in Figure 10, does not seek realistic visual appearance ofmuscle, but is meant to provide useful feedback during implementation and test-ing. All nodal points of discretized grid are drawn as interconnected with theirneighbors using OpneGL libraries’ line primitive and the surface nodal pointsare interconnected via transparent triangular mesh using OpenGLs’ polygonprimitive and alpha blending.
Applications. The author of this work was participating on the developmentof Finnish speaking talking head (the audiovisual speech synthesis system) in
20

LCE HUT16, which was published in [iii]. This animation system uses gen-eralized parametrization approach of weighted superposition of linear trans-formations for facial deformation animation. Promising future application ofproposed VPSOM and musculotendon model planned by the author, is to useproposed PBA models as a boot-strap stage of real-time facial animation sys-tem [iii].
Since the talking head animation system [iii] is actually developed as apart of neuro-scientific experimental environment and it is used as stimuli inexperiments examining cognitive functions of human brain, the actual rangeof potential applications of proposed PBA methods extends far beyond theCA. Methods of neuro-sciences are used, for example, in studies of audiovisualspeech perception or helping to understand the movement coordination drivenby human brain. Moreover, they can actually serve as useful tool in animationsystem evaluation. They can help to increase the quality of produced animationby finding the features important to the human observer. The brain activityis in these studies usually recorded using EEG, MEG, fMRI techniques, ortheir combination. The author of this thesis have already gained long termexperience in EEG and fMRI techniques (please, see e.g.: [xiii], [xviii], [xi])and he aims to make some steps in both these neuro-scientific aspects of muscleactivated computer animation of human body in coming future.
5 Results
Series of example animations will be presented in this section. First the range ofmaterials and objects possible to model by proposed methods will be presented.Later the quality of volume preservation and biomechanical properties willbe examined. Finally, the stability of numerical integration methods will beevaluated.
5.1 Shape and Material Properties
Original EDM from [46] provides means for modeling of curves, surfaces, andsolids. Even though, this thesis focuses primarily on modeling of solid materialas “basement” for soft tissues, also model of surface and cylinder is presented,because its use for skin modeling is considered. The rest shape G0 of all pro-posed deformable bodies can be set arbitrarily. In presented examples theplane was used for surfaces, cube or general block for solids and discretizedsolid cylinder for muscles. Material parameters which can be controlled are:
16Laboratory of Computational Engineering, Helsinki University of Technology, Finland.
21

a) c) e)
b) d) f)
Figure 8: Illustration of range of objects and materials modeled by proposed meth-ods. Material properties: m = 4kg, ω = 0.1, c = 0.1 unless specified otherwise; (a) λ =0.25, ζ = 0.0001, discr. 13× 13; (b) λ = 20, ζ = 0.5, ω = 0.6, c = 1.75, discr. 13× 13; softenedon the right half; (c) λ = 10, ζ = 0.1, discr. 13× 14; (d) the same as in (c) but softened on theright half; (e) ψ = 1, λ = 0.75, discr. 7 × 7 × 7; (f) ψ = 1, λ = 500,m = 10kg, ω = 1.5, c = 5;η22, η23, η32 were softened in the middle region, discr. 11× 11× 5.
stiffness, internal friction, incompressibility and weight. Stiffness to compress-ing, stretching, and shearing is specified via 3× 3 tensor η. Similarly tensor ϕdefines material friction in different directions. Incompressibility parameter ψand general constant friction γ are scalars, similarly as weight m, thus yielding21 independent numbers altogether17. Each of these parameters can be setindependently in every nodal point of discretized material, thus allowing tomodel inhomogeneous anisotropic materials. In case of isotropic homogenousmaterials, the tensor parameters can be easily set using two material constantsλ and ω through formulas derived in section 3.5. Furthermore, musculotendonmodel from section 4, introduces another set of 5 parameters through whichthe behavior of Zajac’s nonlinear model can be adjusted.
Figure 8 shows deformable surface, cylinder and solid. Surface in Picturea) has three corners fixed in space using 9 nodal points and presents soft,cloth like material in gravity. Surface in Picture b) represents the stiff metalsheet like material which is fixed in space in 2 corners using 6 nodal points.In The bending stiffness gradually decreases, starting with nodal point rowmb = n/2 − 1, to illustrate the inhomogeneous properties. Cylinder can beeasily derived from surface model by changing the meaning of FD at borders
17Surfaces require us to define also resistance to bending through bending stiffness tensor B. Size of tensorsused in surface modeling is 2× 2, therefore total number of surface material parameters per nodal point is 14.
22

of parametric space at n = 0 and n = (N − 1) and by setting another restshape G0. The cylinder in second column of figure 8 is fixed in space using tworows of nodal points m = 0 and m = 1 and represents stiff material. Cylinderin Picture d) has modified bending stiffness similarly as in surface model fromPicture b). Picture e) presents incompressible solid in gravitational field, whosetopmost plane is fixed in space. Block of inhomogeneous anisotropic materialis shown on last picture of this figure. Three planes on both sides have verystiff material properties. Block is fixed in space on both sides using two rowsof altogether 40 nodal points. Stiffness constants η22, η23 and η32 were softenedin middle region.
5.2 Volume Preservation
The incompressibility constraint of VPSOM from Section 3.3 was examined bysimple experiment, in which incompressible cube was “attached to the ceiling”and the gravity was introduced suddenly at time t = 0. This incompressibleobject after reaching equilibrium is shown in Figure 8e). The same experimentwas run with the same object with same material parameters, but for differentspatial discretizations. The overall volume of object V , together with the sumover all nodal points of quantity dV from equation (7), marked as ΣdV , wasrecorded during animation. Resulting plots, which display the change of ΣdV(a) and V (b) in % relatively to their respective value in rest state, are shownin Figure 9. Since dV is directly used in constraint volume forces computationΣdV is maintained almost exactly, with only negligible variation. The totalvolume of object V undergoes considerable variation, up to 10% in presentedexample for discretization 3×3×3. Plot b), however, shows that this variationdecreases with increasing spatial resolution, i.e. with increasing accuracy ofcomputation and it is approaching some small positive value, different fromzero. This and other experiments presented in section 5.2 of full text of thethesis show that the inexactness of proposed volumetric constraint is causedmainly by the fact that FD needed to compute constraint forces are nonexistenton the boundary of object. Thus, the variation increases with increasing sizeof discrete elements on the boundary, i.e. with decreasing spatial resolution.In light of fact that living tissues are not exactly incompressible, but quasiincompressible, we conclude, that the variation around 1% achieved alreadywith spatial resolution 9× 9× 9 is satisfactory for the purposes of CA.
The exact volumetric constraint derived using methodology presented in[56] was also tested in this work. Its high computational complexity, however,prohibits its practical use18.
18Please, see section 3.3 and 5.2 of the thesis full text for more details.
23

0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
0 1 2 3 4 5 6 7 8 9 10 11
3x3x34x4x45x5x56x6x67x7x78x8x89x9x9
10x10x1011x11x1112x12x1213x13x13
a)
0
1
2
3
4
5
6
7
8
9
10
0 1 2 3 4 5 6 7 8 9 10 11
3x3x34x4x45x5x56x6x67x7x78x8x89x9x9
10x10x1011x11x1112x12x1213x13x13
b)
Figure 9: Volume change of incompressible solid under the influence of gravityduring simulation. Weight mobject = 4kg, ψ = 10, c = 0, λ = 1.5, ω = 0.1. (a) Relativechange in % of ΣdV vs time; (b) Relative change in % of overall volume V vs time.
a)
b)
Figure 10: Zajac’s tension-length experiment simulation. (a) muscle rest shape; (b)muscle shortened to lMT = 5 and activated.
5.3 Biomechanical Properties of Musculotendon
One way to validate capabilities of proposed musculotendon model is to performexperiments known from investigations of biomechanical properties of living tis-sues similarly as the authors of [8] did, thus we have performed tension-lengthexperiment and quick-release experiment to validate static and dynamic prop-erties of muscle respectively. Series of measurements under various conditionswere performed during these experiments. They are fully described in section5.3 of full thesis text. The main results are present here.
Tension-Length Experiment. Passive musculotendon unit is stretched orshortened to certain length and after some time of reaching equilibrium theexerted force is measured. Passive muscle is then activated and force is mea-sured again. The plot of active contractile force component is obtained bysubtracting the two characteristics. This experiment was performed with theproposed cylindrical model of muscle. Figure 10a) shows rest shape of mus-culotendon and 10b) shows musculotendon shortened by 1cm and activated.Characteristics obtained in this simple experiment are shown in Figure 11a).This and other measurements of static properties of muscle described in section5.3 of the thesis are in good agreement with measurements performed on living
24

0
0.5
1
1.5
2
0 0.5 1 1.5 2
Active ForcePassive ForceActive-Passive
a)
0
200
400
600
800
1000
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
v_max=10v_max=4v_max=2
b)
Figure 11: Results of Zajac’s tension-length (a) and Gasser–Hill’s quick-release (b)
experiments. (a) Plot of normalized force vs shifted normalized muscultendon length ∆lMT =
lMT − lTs . (b) Three results of quick-release experiment for three different values of vMmax. Total
force is plotted vs simulation time. Model discretization was 6× 6× 6 in both cases.
tissues as reported for example in [58, 55].
Quick-Release Experiment. Gasser and Hill activated the muscle and heldit in isometric condition and after equilibrium was reached, the muscle wassuddenly released against no load and it was allowed to shorten to a new lengthwhere it was again fixed and held isometrically. The force recorded immediatelyafter reaching new length was much smaller then the muscle would be expectedto exert at fully activated isometric level at this length and it returned tothe expected level slowly (see e.g. [8]). This experiment was repeated withproposed musculotendon model. The muscle was activated at time t = 0.001s.The insertion tendon attachment of muscle was moved the amount of −0.25during 1ms, after the muscle have reached equilibrium at time t = 0.2. Theforce response of activated muscle is displayed in Figure 11b). Plots from thisfigure suggest that also dynamic properties of muscle are modeled correctly,because they are in good agreement with the previously published results [8].
5.4 Stability of Integration Methods
Adjusting the material properties of proposed models can easily lead to stiffequations of motion19, which are difficult to solve numerically. Furthermore, thestiffness of resulting equations is increasing with increasing spatial discretiza-tion of the model. Therefore, one of the most crucial parts of PBA system isnumerical integration of DE of motion. All implicit and explicit methods men-tioned in section 3.6 were implemented in simulation environment MDDAnim andseries of experiments was performed in order to compare their suitability forDE of motion being solved in this work.
19Please, see section 3.6.4 of full text of theses for explanation.
25

0.001
0.01
0.1
1
10
100
1e-05 0.0001 0.001 0.01
EulerRK2RK4
RKCKVerlet
A-BA-M
a)
10
100
1000
1e-06 1e-05 0.0001 0.001 0.01
EulerRK2RK4
RKCKVerlet
A-BA-M
b)
Figure 12: Stability of explicit integration methods during simulation of cube (a)and muscle (b) in gravitational field. Horizontal axes represent the size of time-step h.Vertical axis represents the value of internal damping ω in (a) and total number of nodal pointsin (b).
For evaluation of explicit methods, the incompressible solid “hanging downthe ceiling”, together with Zajac’s tension-length experiment, were used. Thestability dependence on stiffness of material, material damping, and spatialdiscretization was measured using simple experimental setup. Longest timestep from predefined table of time steps was selected and experiment was runfor 7.5s of simulation time. If the simulation was successful, then this time stepwas marked as maximum stable possible. Smaller time step was selected, if thesolution to DE of motion diverged during the simulation time. Two exampleplots are presented in Figure 12. Plot a) presents the dependence of stability onmaterial damping in cube experiment and Plot b) shows dependence of stabilityon spatial discretization in musculotendon experiment. The experiments haveconfirmed the results of integration method survey presented in section 3.6of thesis text. It suggests that Runge-Kutta methods of order higher than 2are the most appropriate for the problem being solved and that the simplestEuler’s integration method has still much better stability properties then highorder multi-step and predictor corrector methods. 5th order R-K method withadaptive step size control from [40] was used in all experiments presented inthis section.
Implemented implicit methods exhibit unconditional stability20, which mea-ns that the solution to ODE of motion does not diverge to infinity for anystep-size h. Therefore, different experimental setup had to be used to evaluatetheir suitability. Scene from Figure 8a) was used for evaluation of implicit Eulerstep from [46] and implicit method of Terzopoulos from [2]. The simulation wasstarted manually and run for 10s of simulation time. The error of solution wasevaluated visually by the thesis author. The stability dependence on resolutionshows the following table:
20The values of steps sizes up to 106s were tested and result was still visually acceptable.
26

Terzopoulos Implicit Euler
7× 7 0.0325 1.499× 9 0.0292 0.245
11× 11 0.026 0.07
We see that Implicit Euler allows to use about an order of 10 larger time-stepthan method suggested by Terzopoulos. Numerical computation of Jacobianmatrix makes, however, the evaluation of one step in Implicit Euler methodmuch slower then in Terzopoulos’ method and thus the two are of approximatelythe same overall performance.
6 Conclusions
The scope of this thesis was modeling and simulation for the purposes of com-puter animation. The main goals were to design a new model of incompressiblesolid, and to use it as a basis in design of biomechanically based active modelof skeletal muscle with tendon. Secondary goals, naturally arising from maingoals were: to evaluate proposed methods, to evaluate suitability of numeri-cal integration methods, and to make step towards the practical application ofproposed models. Brief summary of author’s contributions is presented in thefollowing lines, while referring to the full text of the thesis in braces.
Elastically deformable model of Terzopoulos et al. was extended into vol-ume preserving soft object animation model in section 3 (chapter 3) by adding:internal friction in subsection 3.2 (section 3.2), incompressibility constraintin subsection 3.3 (section 3.3), means of numerical simulation in subsection3.6 (section 3.6), and discretization independent material properties in sub-section 3.5 (subsection 3.5.3). Model of muscle with tendon was developed insection 4 (chapter 4) by incorporating biomechanical properties of real tissueinto VPSOM, in subsection 4.2 (section 4.2). Series of simulation experimentshave been performed and the qualities of proposed models have been evalu-ated together with solution methods in section 5 (chapter 5). Experimentalsimulation environment MDDAnim have been implemented. It was used to ob-tain all the experimental results presented in this work. It is briefly describedin thesis Appendix B. For the audiovisual speech synthesis animation system(talking head) being developed in LCE, HUT, Helsinki Finland, texturing/headdeforming subsystem and higher-to-lower level command translating subsystem,described in Appendix C of thesis were developed, during authors participationon EU research project – MUHCI.
FDM as a way of numerical solution of continuous elasticity formulationin connection with modeling of skeletal muscle as it is used in this work hasnot been reported nor published yet in CA scientific community. FDM has
27

advantage in relatively simple formulation, and relatively straight-forward im-plementation but it also brings some difficulties, mainly difficult formal eval-uation of stability and convergence of the method and difficulties in handlingderivative approximations on boundaries of objects. Proposed methods andtheir evaluation suggest the need for fast efficient implementation of implicitintegration scheme in order to be able to animate models composed of an orderof thousands of nodal points in real-time. Despite all these facts, the evalua-tions presented in section 5 (chapter 5) show that proposed models are usefulrepresentation of incompressible solid material and a good approximation ofmusculotendon unit ready to be used in higher level animation systems. As anatural conclusion of this work several other possible future development direc-tions can be suggested:
We suggest to increase spatial resolution in order to overcome the problemsof missing FD on objects boundary if needed by application, however, it willnever solve the problem completely. This work have tried to overcome it alsousing “non-symmetric” FD similarly as in [36] but only for deformable surfaceswhere it had proved to be completely inappropriate because of numerical in-stability. Accuracy and stability of non-symmetric FD could be tested withdeformable solid and especially with incompressibility constraint. Some wayof adaptive spatial refinement applied to proposed models could improve thespeed of simulation similarly as in [11]. To define clearer relation of proposedmaterial parameters to real world parameters would simplify model parame-ter adjustments. Some more sophisticated method, which takes into accountoverall performance of integration scheme could be used in evaluation of in-tegration methods, similarly as in [50]. Also evaluation of adaptive step sizecontrol methods and automatic evaluation of absolutely stable methods wouldbe an advantage. The integration of proposed musculotendon model into morecomplex human body animation system will require muscle geometry definitionbased on anatomy. Author has already taken first steps towards this direction.The VHD21 was obtained and several steps towards obtaining anatomical mus-cle model were already reported in work of M.Sc. students A. Herout, J. Velesık,and M. Prchlık. Also collision detection and proper physically correct responseneeds to be implemented together with additional constraints tying the muscu-lotendon component into complex human body model. Steps towards the useof deformable surface from this work as nonlinear model of skin have been donein the work of M.Sc. student P. Jurzykowski. More investigation in this direc-tion would be desirable. Musculotendon model proposed in this work could beadjusted and redirected into different scientific field, for example biomechanics.
The use of physically based models with biomechanical knowledge included
21Visible Human Data set provides precise colorful volumetric model of human body. It is part of VisibleHuman Project of National Library of Medicine, Bethesda, MD, USA.
28

is increasing in recent years. Their deployment in practical systems opensalso many new questions such as coordination of complex motions driven byneural excitation of muscle models, which have hardly been tackled. However,advances achieved in this field during recent years suggest that biomechanicallybased modeling is one of the promising ways.
References
[1] Amaury Aubel. Anatomically-Based Human Body Deformations. PhD thesis, Ecole Poly-technique Federale de Lausanne, Lausanne, EPFL, 2002.
[2] David Baraff and Andrew Witkin. Large Steps in Cloth Simulation. In Computer Graphics(proceedings of SIGGRAPH’98), pages 43–54, 1998.
[3] Alan H. Barr. Global and local deformations of solid primitives. In Ed. H. Christiansen,editor, Computer Graphics (SIGGRAPH ’84 Proceedings, pages 21–30, July 1984.
[4] David E. Breen, Donald H. House, and Michael J. Wozny. Predicting the drape of wovencloth using interacting particles. In Proceedings of SIGGRAPH’94, pages 365–372, 1994.
[5] Michel Carignan, Ying Yang, Nadia Magnenat Thalmann, and Daniel Thalmann. Dressinganimated synthetic actors with complex deformable clothes. In Proceedings of the 19thannual conference on Computer graphics and interactive techniques, pages 99–104. ACMPress, 1992.
[6] George Celniker and Dave Gossard. Deformable Curve and Surface Finite-Elements forFree-Form Shape Design. In SIGGRAPH’91: Proceedings of the 18th annual conferenceon Computer graphics and interactive techniques, pages 257–266. ACM Press, 1991.
[7] John E. Chadwick, David R. Haumann, and Richard E. Parent. Layered Construction forDeformable Animated Characters. In Computer Graphics (SIGGRAPH’89 Proceedings),pages 243–252, 1989.
[8] David Tzu-Wei Chen. Pump It Up: Computer Animation of a Biomechanically Based ofMuscle using the Finite Element Method. PhD thesis, Media Arts and Sciences section,School of Architecture and Planning, Massachusetts Institute of Technology, February1992.
[9] Kwang-Jin Choi and Hyeong-Seok Ko. Stable but Responsive Cloth. In SIGGRAPH’02:Proceedings of the 29th annual conference on Computer graphics and interactive tech-niques, pages 604–611, New York, NY, USA, 2002. ACM Press.
[10] Sabine Coquillart. Extended free-form deformation: A sculpturing tool for 3D geometricmodeling. In Computer Graphics (SIGGRAPH ’90 Proceeding), August 1990.
[11] Gilles Debunne, Mathieu Desbrun, Alan Barr, and Marie-Paule Cani. Interactive Mul-tiresolution Animation of Deformable Models. In Eurographics Workshop on ComputerAnimation and Simulation, 1999.
29

[12] Gilles Debunne, Mathieu Desbrun, Marie-Paule Cani, and Alan H. Barr. Adaptive simu-lation of soft bodies in real-time. In Computer Animation 2000, Philadelphia, USA, pages133–144, May 2000.
[13] Gilles Debunne, Desbrun Mathieu, Marie-Paule Cani, and Alan H. Barr. Dynamic Real-Time Deformations using Space & Time Adaptive Sampling. In Computer Graphics(proceedings of SIGGRAPH’01), 2001.
[14] Evgeny Gladilin. Biomechanical Modeling of Soft Tissue and Facial Expressions for Cran-iofacial Surgery Planning. PhD thesis, Fachbereich Mathematik und Informatik, derFreien Universitat Berlin, Berlin, Germany, October 2002.
[15] Jean-Paul Gourret, Nadia Magnenant Thalmann, and Daniel Thalmann. Simulation ofObject and Human Skin Deformations in a Grasping Task. In SIGGRAPH’89, pages21–30, 1989.
[16] Doug L. James and Kayvon Fatahalian. Precomputing Interactive Dynamic DeformableScenes. ACM Trans. Graph., 22(3):879–887, 2003.
[17] Doug L. James and Dinesh K. Pai. Artdefo: Accurate real time deformable objects. InSIGGRAPH’99: Proceedings of the 26th annual conference on Computer graphics andinteractive techniques, pages 65–72. ACM Press/Addison-Wesley Publishing Co., 1999.
[18] Doug L. James and Dinesh K. Pai. Dyrt: Dynamic response textures for real time defor-mation simulation with graphics hardware. In SIGGRAPH’02: Proceedings of the 29thannual conference on Computer graphics and interactive techniques, pages 582–585, NewYork, NY, USA, 2002. ACM Press.
[19] Doug L. James and Dinesh K. Pai. Multiresolution Green’s Function Methods for Inter-active Simulation of Large-scale Elastostatic Objects. ACM Transactions on Graphics,22(1):47–82, 2003.
[20] Rolf M. Koch and Albert A. Bosshard. Emotion editing using finite elements. ComputerGraphics Forum, 17(3), 1998.
[21] Rolf M. Koch, Markus H. Gross, Friedrich R. Carls, Daniel F. von Buren, GeorgeFankhauser, and Yoav I. H. Parish. Simulating facial surgery using finite element mod-els. In Proceedings of the 23rd annual conference on Computer graphics and interactivetechniques, pages 421–428. ACM Press, 1996.
[22] Rolf M. Koch, S. H. M. Roth, M. H. Gross, A. P. Zimmermann, and H. F. Sailer. Aframework for facial surgery simulation. In SCCG’02: Proceedings of the 18th springconference on Computer graphics, pages 33–42, New York, NY, USA, 2002. ACM Press.
[23] Paul G. Kry, Doug L. James, and Dinesh K. Pai. EigenSkin: Real Time Large Defor-mation Character Skinning in Hardware. In ACM SIGGRAPH Symposium on ComputerAnimation, pages 153–160. ACM Press, 2002.
[24] Richard Laperriere, Nadia Magnenant-Thalmann, and Daniel Thalmann. Joint-Dependent Local Deformations for Hand Animation and Object Grasping. In GraphicsInterface’88, Edmonton, 1988.
[25] Yuencheng Lee, Demetri Terzopoulos, and Keith Waters. Realistic Modeling for FacialAnimation. In ACM SIGGRAPH’95 Conference, pages 55–62, 1995.
30

[26] J. P. Lewis, Matt Cordner, and Nickson Fong. Pose space deformation: a unified approachto shape interpolation and skeleton-driven deformation. In SIGGRAPH’00: Proceedingsof the 27th annual conference on Computer graphics and interactive techniques, pages165–172. ACM Press/Addison-Wesley Publishing Co., 2000.
[27] Jorge C. Lucero and Kevin G. Munhall. A Model of Facial Biomechanics for SpeechProduction. Journal of the Acoustical Society of America, 106(5):2834–2848, 1999.
[28] Nadia Magnenant-Thalmann and Daniel Thalmann. The Direction of Synthetic Actors inthe Film Rendez-vous a Montreal. IEEE Computer Graphics & Applicaions, pages 41–51,1987.
[29] W. Maurel, Y. Wu, N. Magnenat-Thalmann, and D. Thalmann. Biomechanical Modelsfor Soft Tissue Simulation. Springer-Verlag Berlin/Heidelberg, 1998.
[30] Walter Maurel. 3D Modeling of Human Upper Limb Including the Biomechanics of Joints,Muscles and Soft Tissues. PhD dissertation, Ecole Polytechnique Federaly de Lausanne,Lausanne, EPFL, 1999.
[31] Laurent Moccozet. Hand Modeling and Animation for Virtual Humans. PhD thesis,University of Geneva, 1996.
[32] Luciana Porcher Nedel and Daniel Thalmann. Real Time Muscle Deformations UsingMass-Spring Systems. In Computer Graphics Interface, 1998.
[33] Victor Ng-Thow-Hing. A Biomechanical Musculotendon Model for Animating Articu-lated Objects. Master’s thesis, Graduate Department of Computer Science, University ofToronto, 1994.
[34] Victor Ng-Thow-Hing. Anatomically-based models for physical and geometric reconstruc-tion of humans and other animals. PhD thesis, Graduate Department of Computer Sci-ence, University of Toronto, 2001.
[35] Hana Novotna, Stanislav Cais, and Miroslav Ptacek. Teoreticka mechanika. SNTL, ALFA,Praha, 1983.
[36] P. Palmer, A. Mir, and M. Gonzales. Stability and Complexity Study of Animated Elasti-cally Deformable Objects. In Hans-Helmut Nagel and Francisco J. Perales Lopez, editors,Articulated Motion and Deformable Objects, pages 58–71. Department de Matematiquesi Informatica, 2000.
[37] A. Pentland and J. Williams. Good Vibrations: Modal Dynamics for Graphics and An-imation. In SIGGRAPH’89: Proceedings of the 16th annual conference on Computergraphics and interactive techniques, pages 215–222. ACM Press, 1989.
[38] Michel Pitermann and Kevin G. Munhall. An Inverse Dynamics Approach to Face Ani-mation. Journal of the Acoustical Society of America, 110(3):1570–1580, 2001.
[39] John Platt and Alan Barr. Constraint Methods for Flexible Models. In SIGGRAPH’88:Proceedings of the 15th annual conference on Computer graphics and interactive tech-niques, pages 279–288, 1988.
[40] William H. Press, Brian P. Flannery, Saul A. Teukolsky, and William T. Vetterling. Nu-merical Recipes: The Art of Scientific Computing. Cambridge University Press, Cam-bridge (UK) and New York, 2nd edition, 1992.
31

[41] Karel Rektorys and spolupracovnıci. Prehled uzite matematiky I. Prometheus, Praha,1995.
[42] Ferdi Scheepers, Richard, E. Parent, Wayne, E. Carlson, and Stephen, F. May. Anatomy-Based Modeling of the Human Musculature. In ACM Computer Graphics (SIG-GRAPH’97), 1997.
[43] T. W. Sederberg and S. R. Perry. Free-form deformation of solid geometric models. In Ed.H. Christiansen, editor, Computer Graphics (SIGGRAPH’86 Proceedings), pages 151–160,July 1986.
[44] Jianhua Shen and Daniel Thalmann. Interactive Shape Design Using Metaballs andSplines. In Proc. Implicit Surfaces 95, pages 187–196, 1995.
[45] J. Teran, S. Blemker, V. Ng Thow Hing, and R. Fedkiw. Finite volume methods forthe simulation of skeletal muscle. In SCA’03: Proceedings of the 2003 ACM SIG-GRAPH/Eurographics Symposium on Computer animation, pages 68–74. EurographicsAssociation, 2003.
[46] Demetri Terzopoulos, John Platt, Alan Barr, and Kurt Fleischer. Elastically deformablemodels. In Computer Graphics (SIGGRAPH’87 Proceedings), pages 205–214, 1987.
[47] Matthias Teschner, Bruno Heidelberger, Matthias Muller, and Markus Gross. A Versatileand Robust Model for Geometrically Complex Deformable Solids. In Proc. ComputerGraphics International CGI’04, pages 312–319, June 16-19 2004.
[48] Russell Turner and Daniel Thalmann. The Elastic Surface Layer Model for AnimatedCharacter Construction. In Computer Graphics International, 1993.
[49] Pascal Volino, Martin Courchesne, and Nadia Magnenat-Thalmann. Versatile and Effi-cient Techniques for Simulating Cloth and Other Deformable Objects. In SIGGRAPH’95:Proceedings of the 22nd annual conference on Computer graphics and interactive tech-niques, pages 137–144, New York, NY, USA, 1995. ACM Press.
[50] Pascal Volino and Nadia Magnenant-Thalmann. Comparing Efficiency of IntegrationMethods for Cloth Simulation. In Computer Graphics International ‘2001, page 265,2001.
[51] Pascal Volino and Nadia Magnenat-Thalmann. Implementing Fast Cloth Simulation withCollision Response. In Nadia Magnenat-Thalmann and Tat-Seng Chua, editors, ComputerGraphics International (CGI’00), page p.257, 2000.
[52] Alan Watt and Mark Watt. Advanced Animation and Rendering Techniques, Theory ansPractice. Addison-Wesley, July 1992.
[53] William Welch and Andrew Witkin. Variational Surface Modeling. In SIGGRAPH’92:Proceedings of the 19th annual conference on Computer graphics and interactive tech-niques, pages 157–166, New York, NY, USA, 1992. ACM Press.
[54] Jane Wilhelms and Allen Van Gelder. Anatomically based modeling. In SIGGRAPH’97:Proceedings of the 24th annual conference on Computer graphics and interactive tech-niques, pages 173–180. ACM Press/Addison-Wesley Publishing Co., 1997.
[55] David A. Winter. Biomechanics of Human Movement. John Wiley & Sons, A Wiley-Interscience Publication, 1979.
32

[56] Andrew Witkin, Michael Gleicher, and William Welch. Interactive Dynamics. In SI3D’90:Proceedings of the 1990 symposium on Interactive 3D graphics, pages 11–21. ACM Press,1990.
[57] Andrew Witkin and William Welch. Fast Animation and Control of Nonrigid Structures.In SIGGRAPH’90: Proceedings of the 17th annual conference on Computer graphics andinteractive techniques, pages 243–252. ACM Press, 1990.
[58] Felix E. Zajac. Muscle and tendon: Properties, models, scaling, and application to biome-chanics and motor control. Critical Reviews in Biomedical Engineering, 17(4):359–411,1989.
33

Author’s Publications
Publications directly related to thesis:
[i] Dobsık, M., Frydrych, M.: Biomechanically Based Muscle Model for Dynamic Com-puter Animation, In Proceedings of International Conference on Computer Vision andGraphics (ICCVG’04), Warsaw, Poland, September 22th-24th, Kluwer Publishing, 2005.
[ii] Frydrych, M., Dobsık, M., Katsyri, J., Egges, A., Sams, M., Magnenat-Thalmann, N.:“Identification of computer animated emotional facial expressions”, Technical Report,Helsinki University of Technology and University of Geneva, MUHCI 2004.
[iii] Frydrych, M., Katsyri, J., Dobsık, M., Sams, M.: Toolkit for Animation of FinnishTalking Head, In Proceedings of Audio Visual Speech Processing conference (AVSP’03),St Jorioz, France, September 4th-7th, 2003, p. 199-204, ISSN: 1680-8908.
[iv] Frydrych, M., Katsyri, J., Krylov, A., Dobsık, M.: Artificial Person. Final report ofLCE, HUT work package of project Recognition and Synthesis of Faces, Gestures andActions, funded by Tekes (RESYFA 40823/00, Finnish governmental research grantagency) and by the industrial partners Nokia, Alma Media, and Kuulonhuoltoliitto,March, 2003.
[v] Fedor, M., Dobsık, M.: Capturing and animation of human body motion, Final reportof grant project FRVS MSMT, FR1530/2000/G1, 2000-2001.
[vi] Dobsık, M.: Soft Tissue Simulation for Computer Animation of Vertebrates, Modellingand Simulation in Management, Informatics and Control, proceedings of MOSMIC’99,vol. 1, EDIS - University of Zilina, Sulov, 1999, p. 51-58, ISBN 80-7100-635-1.
[vii] M. Fedor, M., Dobsık, M.: Capturing and Visualisation of Human Body Motion, 33rdSpring International Conference on Modelling and Simulation of Systems MOSIS’99Proceedings, vol. 33, MARQ, Roznov pod Radhostem, 1999, p. 51-59, ISBN 80-85988-33-X.
[viii] Dobsık, M.: Pocıtacova animace mekkych tkanı obratlovcu (Computer Animation ofSoft Tissue of Vertebrates), Sbornık pracı studentu a doktorandu 1999, roc. 1, BUTDCSE Brno, 1999, s. 77-78, ISBN 80-214-1155-4.
[ix] Dobsık M., Fedor, M: Pocıtacova animace dynamickych deju (Computer Animation ofDynamic processes), Fond rozvoje vysokych skol, final report of grant project 1083 T.O.G1, 1999.
[x] Fedor, M. Dobsık, M: Vizualizace realnych deju v pocıtacove animaci (Visualisation ofreal processes in computer animation), Fond aktivit pro vedy a umenı VUT, final reportof grant project FV 480003/98, 1998.
Other publications:
[xi] Brazdil, M., Dobsık, M., Mikl, M., Hlustık, P., Daniel P., Pazourkova, M., Krupa, P.,Rektor, I.: Combined Event-Related fMRI and Intracerebral ERP Study of an AuditoryOddball Task, In NeuroImage, 26(1):285-293, 2005, ISSN: 1053-8119.
[xii] Brazdil, M., Kuba, R., Daniel, P., Sochurkova, D., Dobsık, M., Rektor, I.: Covert VisionSign. In: European Journal of Neurology, Vol 9, No. 3., GB, 2002, p. 316-319, ISSN1351-5101.
34

[xiii] Brazdil, M., Dobsık, M., Pazourkova, M., Krupa, P., Rektor, I.: The Role of fMRI inEvaluation of Cognitive Function of Human Brain. Localisation of Activated Neuronalpopulation using “odd-ball” task. In: Ceska a Slovenska neurologie a neurochirurgie,vol. 2002, No. 5, p. 10, ISSN 1210-7859.
[xiv] Dobsıkova A., Dobsık M.: Vyvoj, realizace a distribuce titulu CD-ROM, Grantovyprogram podpora elektronickeho publikovanı, zaverecna zprava grantoveho projektu:53/B4842 -BPUEP 2000, Open Society Fund Praha (OSF), 19. cervence, 2002.
[xv] Dobsık, M.: Tvarova zmena pomocı deformace sıte (Digital Image Morphing), DiplomaThesis, BUT DCSE Brno, 1997.
[xvi] Dobsık, M.: Tvarova zmena obrazu (Image Metamorphosis), Contribution to competi-tion: Armed Forces Communications & Electronics Association, Czech Branch, 1997.
[xvii] Dobsık, M.: Tvarova zmena obrazu pomocı deformace sıte (Shape Change of Imigesusing Grid Deformation), Contribution to competition: “Tvurcı cinnost studentu adoktorandu ’97”, BUT DCSE Brno, 1997.
Abstracts:
[xviii] Brazdil, M., Dobsık, M., Mikl, M., Daniel, P., Pazourkova, M., Krupa, P., Rektor,I.: Intracerebral ERP correlated with fMRI findings in the study of auditory oddballparadigms, In Society Proceedings of 50th Congress of the Czech and Slovak Soci-ety of Clinical Neurophysiology, Volume 115, p. 1954-1954, 2004, ISSN: 1388-2457,http://www.elsevier.com/locate/clinph
[xix] Brazdil, M., Dobsık, M., Mikl, M., Daniel, P., Pazourkova, M., Krupa, P., Rektor,I.: Combined event-related functional magnetic resonance imaging and intracerebralevent-related potentials study of auditory oddball task. Muscle & Nerve 2003; Suppl.12, S21.
[xx] Brazdil M., Dobsık M., Mikl M., Daniel P., Pazourkova M., Krupa P., Rektor I.: Ko-relace intracerebralnıch ERP s nalezy funkcnı magneticke rezonance pri studiu slu-choveho oddball paradigmatu. Sbornık abstrakt 50. Spolecneho sjezdu Ceske a Sloven-ske spolecnosti pro klinickou neurofyziologii, Brno, 24.-25.11. 2003
[xxi] Brazdil M., Dobsık M., Daniel P., Pazourkova M., Krupa P., Rektor I.: Combinedevent-related fMRI and intracerebral ERP study of auditory oddball task. EuropeanJournal of Neurology 2002; 9 (Suppl. 2): 143.
[xxii] Brazdil M., Dobsık M., Daniel P., Pazourkova M., Krupa P., Rektor I.: Combined event-related fMRI and intracerebral ERP studies of auditory oddball tasks. Abstract book ofthe 14th Congress of Pathological and Clinical Physiology, Hradec Kralove 2002; 21-22.
[xxiii] Brazdil M., Dobsık M., Pazourkova M., Krupa P., Rektor I.: Lokalizace “oddball”ukolem aktivovanych neuronalnıch populacı - fMRI studie. Sbornık abstrakt Kongresuklinicke neurologie, Praha, 5.-7.12. 2002; 14.
35

Curriculum Vitae
Personal Data
Name: Martin DobsıkBorn: Brno, Czech republic, 1974Contact: [email protected], [email protected]
Education
2000–2005 Ph.D. student in combined form of study, major: Information Technology, BrnoUniversity of Technology (BUT), Faculty of Information Technology (FIT)22.
1997–2000 Ph.D. student, full-time, major in: Cybernetics and Informatics, Brno Universityof Technology (BUT), Department of Computer Science and Electrical Engineering(DCSE).
1992–1997 Master of Science (Ing.) 10th in the class of 120 students, Faculty of Electri-cal Engineering and Computer Science, Major in: Computer Science and Engineering,Specialization: Computer Graphics.
1988–1992 Secondary School of Electro-technical Engineering, Kounicova 16, Brno. Major in:Electronic and communication devices, Specialization: Electronic Computer Systems.
Professional experience
V. 2002–II. 2005 Assistant professor, FIT, BUT in Brno. Teaching of courses: Principlesof Computer Graphics, Computer Graphics, and Diploma thesis supervision.
X. 2003–II. 2004 Scholarship for continuation of Ph.D. studies at Laboratory of Computa-tional Engineering (LCE - www.lce.hut.fi), Helsinki University of Technology (HUT),Helsinki, Finland. Provided by Finnish organization CIMO (www.cimo.fi).
X. 2002–VII. 2003 Young researcher position in EU grant project Multi-modal Human Com-puter Interaction (MUHCI, HPRN-CT-2000-00111, www.muhci.org), Participation onproject of audiovisual speech synthesis Finnish Speaking Talking Head. Laboratory ofComputational Engineering, Helsinki University of Technology, Finland
III. 2002–V. 2002 Technical assistant, FIT, BUT, Brno. Participation in teaching of thecourses: Algorithms and Programming, Programming Seminar, and Diploma thesis su-pervision.
VII. 2000–III. 2002 Civil service at St. Anne’s University Hospital in Brno, Czech Repub-lic. Active participation on implementation of Functional Magnetic Resonance Imaging(fMRI) in clinical and research applications during spare time.
X. 1997–VI. 2000 Partial employment at DCSE, BUT Brno. Teaching in courses (selectedlectures, laboratories, etc.): Principles of Computer Graphics and Computer Graphics.
IX. 1998–XII. 1998 One semester at Centre for Vision Speech and Signal Processing, Uni-versity of Surrey, Guildford, England. Development of optical lip reading system forspeech recognition.
1995–1997 Development of OBERON-2 compiler for embedded systems in Czech companyCersoft : Implementation of supplemental (run-time) library for programming languageOBERON-2 (Bachelor Project).
1994–1995 Technical assistant for computer maintenance in company GOSVO Ltd, Brno.
22New faculty (FIT) was founded on 1.1.2002 from DCSE
36