
Computer-Aided Design and Manufacturing Laboratory: 3D Minkowski sum computation Sara McMains UC...
31
Computer-Aided Design and Manufacturing Laboratory: 3D Minkowski sum computation Sara McMains UC Berkeley
-
Upload
andrea-lang -
Category
Documents
-
view
224 -
download
0
Transcript of Computer-Aided Design and Manufacturing Laboratory: 3D Minkowski sum computation Sara McMains UC...

Computer-Aided Design and Manufacturing Laboratory: 3D Minkowski sum computation
Sara McMains
UC Berkeley

University of California, Berkeley
Problem Description Input
Triangulated polyhedra Output
Minkowski sum (MS) rendering MS voxelization
University of California, Berkeley
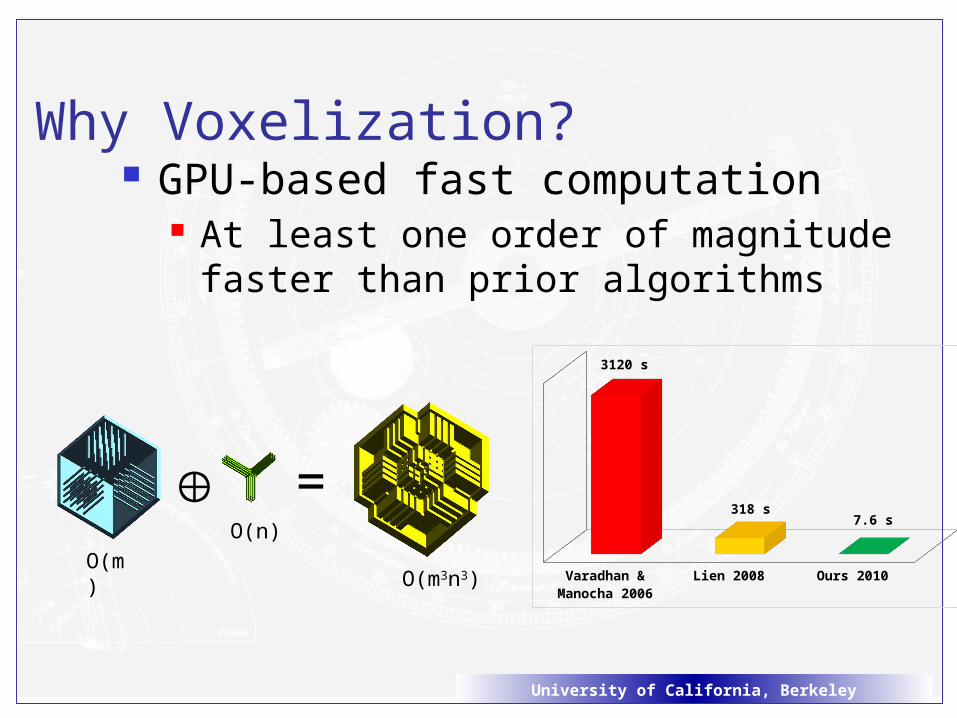
Why Voxelization? GPU-based fast computation
At least one order of magnitude faster than prior algorithms
Varadhan & Manocha 2006
Lien 2008 Ours 2010
3120 s
318 s7.6 s
=
O(m3n3)O(m)
O(n)

University of California, Berkeley
Why Voxelization Ready-to-use sample points
B-rep based MS is usually sampled for motion planning [Lien 08, Varadhan et al. 06]
Free C- Space:Feasible locations where the robot doesn’t collide with the obstacle
start
goal
path
( Obstacle Robot )c
Obstacle RobotForbidden C-Space:
?

University of California, Berkeley
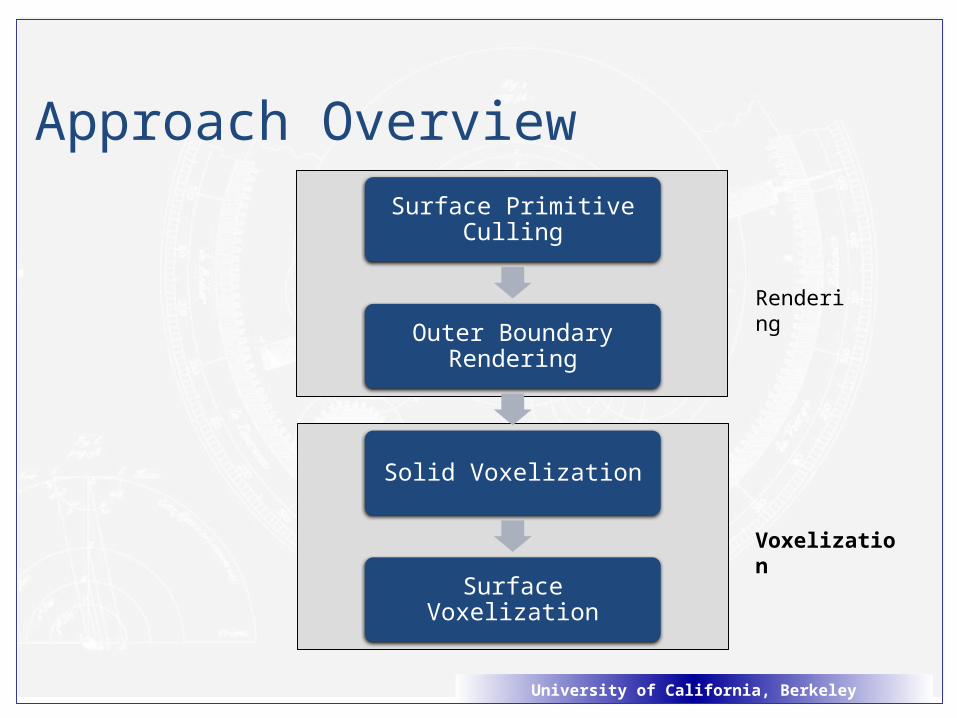
Approach OverviewSurface Primitive
Culling
Outer Boundary Rendering
Solid Voxelization
Surface Voxelization
Rendering
Voxelization

University of California, Berkeley
Surface Primitives MS boundary surfaces:
(trimmed) triangle primitives
Triangle vertex (trimmed) quad
primitives Edge edge
Number of primitives O(n2)
⊕

University of California, Berkeley
Primitive Culling Culling out “non-contributing”
primitives Primitives completely hidden inside
Conservative culling Still ~99% of primitives are culled out
Before Culling
After Culling

University of California, Berkeley
Culling Criteria Convexity Test
fA⨁vB contributing only if vB is convex eA⨁eB contributing only if eA and eB are
convex
fA
vB
eAeB

University of California, Berkeley
Culling Criteria Orientation Test [Kaul and Rossignac 92]
fA⨁vB contributing only if ei
B, nAeiB 0
nA: outer normal of fA
eiB: i-th incident edge of vB
eA⨁eB contributing only if ei , (eA×eB)ei has same sign
ei: i-th incident edge of eA or eB
nA
fA e0
vB
e1 em……
eB
e2
e3
eA
e0
e1

University of California, Berkeley
Culling Examples
(500)
(12,396)
(2,116)
Ball + Clutch Ball + Bull Clutch + Bull0
20,000,000
40,000,000
60,000,000
80,000,000
100,000,000
99.11% reduction
99.66% reduction
98.92% reduction
Before culling After culling
# p
rim
itiv
es
University of California, Berkeley
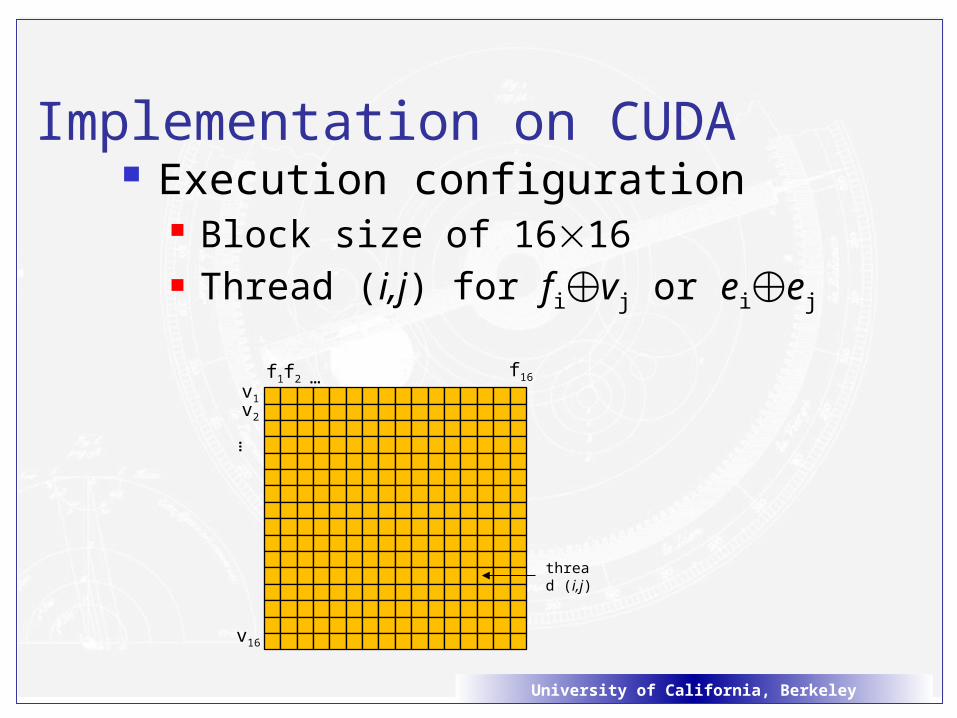
Implementation on CUDA Execution configuration
Block size of 1616 Thread (i,j) for fi⨁vj or ei⨁ej
f1 f2f16
v1v2
v16
…
…
thread (i,j)

University of California, Berkeley
Memory Optimization Coalesced global memory
(x1y1z1x2y2z2…xnynzn) – not coalesced
(x1x2…xny1y2…ynz1z2…zn) – coalesced Shared memory
16 triangles and 16 vertices per block(or 16 edges from each polyhedron)
~3 speedup gain
…
…

University of California, Berkeley
Memory Optimization
octopus + baby
dancing_kids + torus
octopus + horse
0
5
10
15
20
25
Uncoalesced global memory
Coalesced global memory
Shared memory + coalesced global memory
Tim
e (s
econ
ds)

University of California, Berkeley
Rendering Results
A:
B:
AB:

University of California, Berkeley
Rendering Timings
bunny + ball pig + horse Scooby + torus dancing kids + octopus0
100
200
300
400
500
26x speedup
25x speedup
29xspeedup
32xspeedup
CPU - 3 GHz Pentium 4 GPU - Quadro FX 5800
TIm
e (
seco
nd
s)
University of California, Berkeley
Approach OverviewSurface Primitive
Culling
Outer Boundary Rendering
Solid Voxelization
Surface Voxelization
Rendering
Voxelization

University of California, Berkeley
Overview of Voxelization Algorithm
Primitive Voxelization Orthogonal Fill Flood Fill

University of California, Berkeley
Primitive Voxelization To voxelize the remaining primitives
after culling
Contributing primitives
Non-contributing primitives

University of California, Berkeley
GPU-Based Voxelization [Dong et al. 04]
Volume encoding 3D texture (32-bit RGBA) 1 bit/voxel Or 128 MB for 10243
Multiple Rendering Targets (MRTs) Render to 8 buffers
simultaneously Texture composite
Three directional voxelizations
328 slices per rendering
One of three rendering directions
3D texture visualization: each color band represents eight slices of voxels

University of California, Berkeley
Orthogonal Fill To find outer voxels visible along
one of the six orthogonal directions
Depth buffer 8.0 5.6
Depth
0
1
2
3
4
5
6
7
8
1.2 1.8 2.4 2.3 2.8 8.0
Render to depth buffer
Projection plane
Depth
0
1
2
3
4
5
6
7
8
Color coding(2 bits per color channel)
Depth buffer 8.0 5.6 1.2 1.8 2.4 2.3 2.8 8.0
Projection plane

University of California, Berkeley
Flood Fill To find remaining outer voxels not
visible along any of the six orthogonal directions
Flood fill (seed fill)
Barrier
Seed
University of California, Berkeley
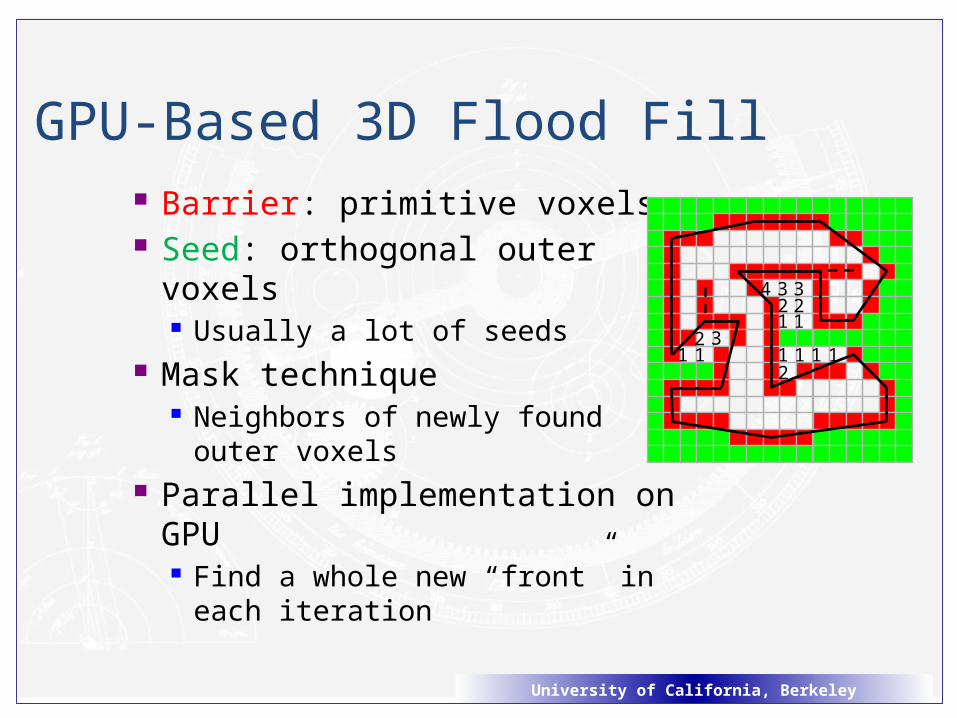
GPU-Based 3D Flood Fill Barrier: primitive voxels Seed: orthogonal outer
voxels Usually a lot of seeds
Mask technique Neighbors of newly found
outer voxels Parallel implementation on
GPU Find a whole new “front” in
each iteration
1 1 1 1 1 1
1 1
2
2
2 23 3
3
4
University of California, Berkeley
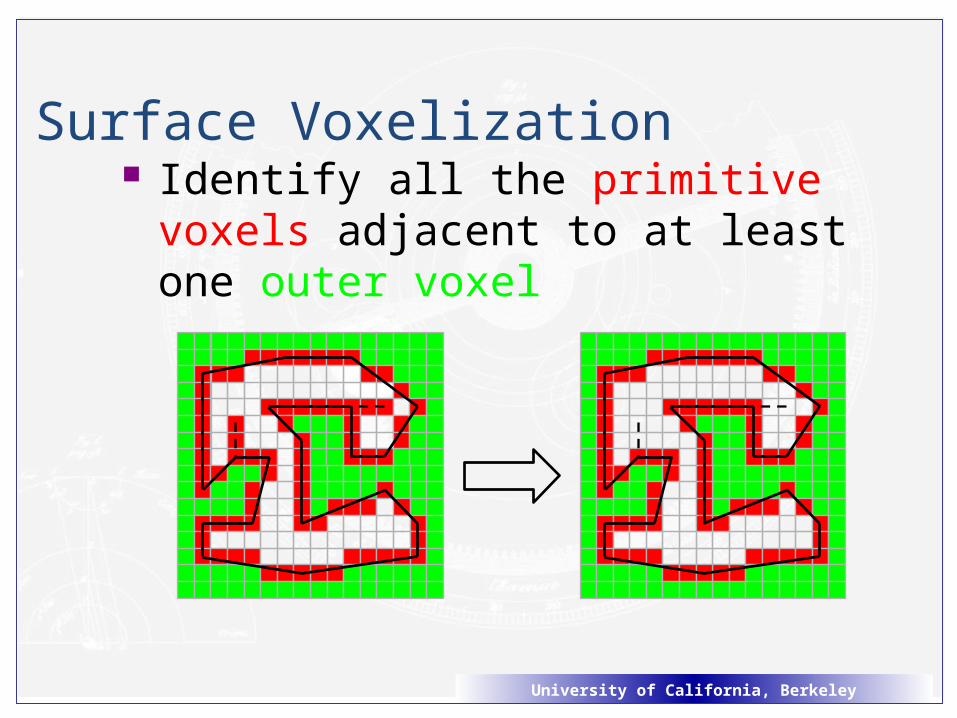
Surface Voxelization Identify all the primitive voxels
adjacent to at least one outer voxel

University of California, Berkeley
Voxelization Results
(170,106)
(1,600)
(78,706) (8,276)
Resolution: 10243
Time: 16.2 s
Resolution: 10243
Time: 25.7 s
Limitation: holes are not computed

University of California, Berkeley
Timings
bull + frame grate1 + grate2 clutch + knot bull + knot inner ear + knot0.00
100.00
200.00
300.00
400.00
500.00
600.00
700.00
800.00
900.00
1000.00
148x 169x 351x
336x
454x
21x 42x 72x
66x
95x
Lien's Ours: 512 Ours: 1024
Tim
e (s
econ
ds)

University of California, Berkeley
Summary GPU-based voxelization approach for
MS Robust and easy implementation At least one order of magnitude faster Memory efficient

University of California, Berkeley
Acknowledgments Wei Li NSF DMI-0547675, 0621198 UC Discovery

University of California, Berkeley
THANKS

University of California, Berkeley
Backup Slides

University of California, Berkeley
MS with Holes The yellow disc can be placed at B,
but it cannot go from A to B
Object Space Configuration Space

University of California, Berkeley
Accuracy of Voxelization A sphere needs to be polygonized
with about 5,000 triangles [Baumgardner
and Frederickson, 1985] in order to match the accuracy of the voxelization at a resolution of 10243.


















