
Computational Geometry: - Line segment intersectionpage.mi.fu-berlin.de/panos/cg13/l03.pdf ·...
62
Computational Geometry: Line segment intersection Panos Giannopoulos, Wolfgang Mulzer, Lena Schlipf AG TI SS 2013
Transcript of Computational Geometry: - Line segment intersectionpage.mi.fu-berlin.de/panos/cg13/l03.pdf ·...

Computational Geometry:Line segment intersection
Panos Giannopoulos, Wolfgang Mulzer, Lena SchlipfAG TI
SS 2013

Tutorial room change: 055 this building !!!(from next monday on)

Outline
Motivation
Line segment intersection (and the sweep line paradigm)
Assignment 3
CGAL and Google Summer of Code
,FU Berlin, Computational Geometry:, SS 2013 3
Map layers
MotivationLine segment intersection
Plane sweepMap overlay
Map layers
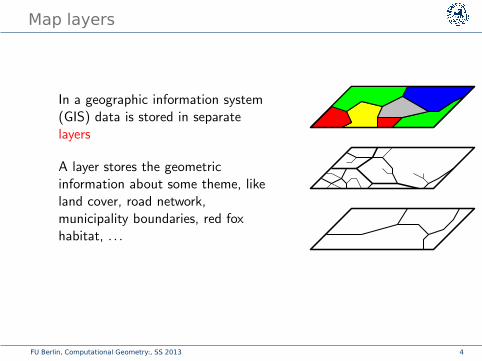
In a geographic information system(GIS) data is stored in separatelayers
A layer stores the geometricinformation about some theme, likeland cover, road network,municipality boundaries, red foxhabitat, . . .
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 4

Map overlay
MotivationLine segment intersection
Plane sweepMap overlay
Map overlay
Map overlay is the combination oftwo (or more) map layers
It is needed to answer questions like:
What is the total length ofroads through forests?
What is the total area of cornfields within 1km from a river?
What area of all lakes occurs atthe geological soil type “rock”?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 5

Map overlay
MotivationLine segment intersection
Plane sweepMap overlay
Map overlay
To solve map overlay questions, weneed (at the least) intersectionpoints from two sets of line segments(possibly, boundaries of regions)
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 5

The (easy) problem
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
The (easy) problem
Let’s first look at the easiest versionof the problem:
Given a set of of n line segments inthe plane, find all intersection pointsefficiently
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 6

An easy, optimal algorithm ?
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
An easy, optimal algorithm?
Algorithm FindIntersections(S)Input. A set S of line segments in the plane.Output. The set of intersection points among the segments in S.1. for each pair of line segments ei,ej ∈ S2. do if ei and ej intersect3. then report their intersection point
Question: Why can we say that this algorithm is optimal?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 7

Well..Motivation
Line segment intersectionPlane sweep
ProblemOutput-sensitive algorithmsSome attempts
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 8

Output sensitive algorithm
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
Output-sensitive algorithm
The asymptotic running time of analgorithm is always input-sensitive(depends on n)
We may also want the running timeto be output-sensitive: if the outputis large, it is fine to spend a lot oftime, but if the output is small, wewant a fast algorithm
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 9

Intersection points in practice
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
Intersection points in practice
Question: How many intersectionpoints do we typically expect in ourapplication?
If this number is k, and if k = O(n),it would be nice if the algorithm runsin O(n logn) time
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 10

First attempt
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
First attempt
Observation: Two line segmentscan only intersect if their y-spanshave an overlap
So, how about only testing pairs ofline segments that intersect in they-projection?
1D problem: Given a set of intervalson the real line, find all partlyoverlapping pairs
x
y
s1 s2s3 s4 s5 s6
(s1, s2), (s4, s6), (s5, s6)
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 11

First attempt
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
First attempt
1D problem: Given a set of intervals on the real line, find all partlyoverlapping pairs
Sort the endpoints and handle them from left to right; maintaincurrently intersected intervals in a balanced search tree T
Left endpoint of si: for each sj in T, report the pair si,sj. Theninsert si in T
Right endpoint of si: delete si from T
Question: Is this algorithm output-sensitive for 1D intervalintersection?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 11

First attempt
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
First attempt
Back to the 2D problem:
Determine the y-intervals of the 2D line segments
Find the intersecting pairs of intervals with the 1D solution
For every pair of intersecting intervals, test whether thecorresponding line segments intersect, and if so, report
Question: Is this algorithm output-sensitive for 2D line segmentintersection?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 11

Second attempt
MotivationLine segment intersection
Plane sweep
ProblemOutput-sensitive algorithmsSome attempts
Second attempt
Refined observation: Two linesegments can only intersect if theiry-spans have an overlap, and theyare adjacent in the x-order at thaty-coordinate (they are horizontalneighbors)
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 12

Plane sweep
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Plane sweep
The plane sweep technique: Imagine a horizontal linepassing over the plane from top to bottom, solving theproblem as it moves
The sweep line stops and the algorithm computes atcertain positions ⇒ events
The algorithm stores the relevant situation at the currentposition of the sweep line ⇒ status
The algorithm knows everything it needs to know abovethe sweep line, and found all intersection points
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 13

Sweep
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Sweep
computed
unexploredComputational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 14

Sweep and status
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Sweep and status
computed
unexplored
status
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 15
Status and events
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status and events
The status of this particular plane sweep algorithm, at thecurrent position of the sweep line, is the set of line segmentsintersecting the sweep line, ordered from left to right
The events occur when the status changes, and when outputis generated
event ≈ interesting y-coordinate
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 16

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s1
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s2 after s1
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17
Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
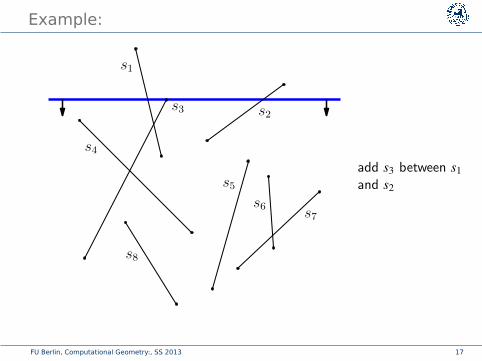
add s3 between s1and s2
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s4 before s1
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
report intersection(s1,s2); swap s1and s3
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
remove s2
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
remove s1
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17
Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
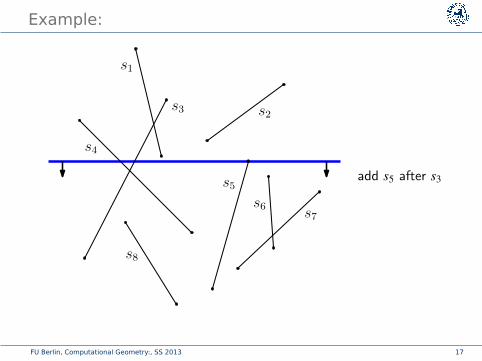
add s5 after s3
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
report intersection(s3,s4); swap s3and s4
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

Example:Motivation
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
. . . and so on . . .
Computational Geometry Lecture 2: Line segment intersection for map overlay,
FU Berlin, Computational Geometry:, SS 2013 17

The events
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
The events
When do the events happen? When the sweep line is at
an upper endpoint of a line segment
a lower endpoint of a line segment
an intersection point of a line segment
At each type, the status changes; at the third type output isfound too
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 18

Assume no degenerate cases
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Assume no degenerate cases
We will at first exclude degenerate cases:
No two endpoints have the samey-coordinate
No more than two line segmentsintersect in a point
. . .
Question: Are there more degeneratecases?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 19

Event list and status structure
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event list and status structure
The event list is an abstract data structure that stores allevents in the order in which they occur
The status structure is an abstract data structure thatmaintains the current status
Here: The status is the subset of currently intersected linesegments in the order of intersection by the sweep line
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 20

Status structure
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
We use a balanced binary search tree with the line segmentsin the leaves as the status structure
s1 s2s3 s4 s5 s6
s7s8
s1
s2
s3
s4
s5
s6
s7
s1 s2 s3 s4 s5 s6 s7 s8
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 21

Status structure
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
s1 s2s3 s4 s5 s6
s7s8
s1
s2
s3
s4
s5
s6
s7
s1 s2 s3 s4 s5 s6 s7 s8
s9
Upper endpoint: search, and insertComputational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 21

Status structure
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
s1 s2s3 s4 s5 s6
s7s8
s1
s2
s3
s4
s5
s6
s7
s1 s2 s3 s4 s5 s6 s7 s8
s9
Upper endpoint: search, and insertComputational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 21

Status structure
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
s1 s2s3 s4 s5 s6
s7s8
s1
s2
s3
s4
s5
s6
s7
s1 s2
s3
s4 s5 s6 s7 s8
s9
s9
s9
Upper endpoint: search, and insertComputational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 21

Status structure
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
Sweep line reaches lower endpoint of a line segment: deletefrom the status structure
Sweep line reaches intersection point: swap two leaves in thestatus structure (and update information on the search paths)
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 21

Finding events
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Finding events
Before the sweep algorithm starts, we know all upperendpoint events and all lower endpoint events
But: How do we know intersection point events???(those we were trying to find . . .)
Recall: Two line segments can only intersect if they arehorizontal neighbors
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 22

Finding events
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Finding events
Lemma: Two line segments si and sj canonly intersect after (= below) they havebecome horizontal neighbors
Proof: Just imagine that the sweep line isever so slightly above the intersection pointof si and sj, but below any other event �
Also: some earlier (= higher) event madesi and sj horizontally adjacent!!!
sisj
sisj
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 22
Event list
Line segment intersectionPlane sweepSubdivisions
IntroductionEvents, status, structuresEvent handlingEfficiency
Event list
The event list must be a balanced binary search tree, becauseduring the sweep, we discover new events that will happenlater and we want to be able to test whether an event isalready in the list
We know upper endpoint events and lower endpoint eventsbeforehand; we find intersection point events when theinvolved line segments become horizontal neighbors
Geometric Algorithms Lecture 2: Line segment intersection and subdivisions
,FU Berlin, Computational Geometry:, SS 2013 23

Structure of the sweep algorithm
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Structure of sweep algorithm
Algorithm FindIntersections(S)Input. A set S of line segments in the plane.Output. The intersection points of the segments in S, with for
each intersection point the segments that contain it.1. Initialize an empty event queue Q. Insert the segment
endpoints into Q; when an upper endpoint is inserted,the corresponding segment should be stored with it
2. Initialize an empty status structure T3. while Q is not empty4. do Determine next event point p in Q and delete it5. HandleEventPoint(p)
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 24

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an upper endpointevent, and s is the line segment thatstarts at p:
1 Search with p in T, and insert s2 If s intersects its left neighbor in
T, then determine theintersection point and insert in Q
3 If s intersects its right neighbor inT, then determine theintersection point and insert in Q
p
s
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is a lower endpointevent, and s is the line segment thatends at p:
1 Search with p in T, and delete s2 Let sl and sr be the left and
right neighbors of s in T (beforedeletion). If they intersectbelow the sweep line, then inserttheir intersection point as anevent in Q
p
s
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 . . .
2 . . .
3 . . .
4 . . .
p
s s′
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 . . .
3 . . .
4 . . .
p
s s′
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 If s′ and its new left neighbor in
T intersect below the sweepline, then insert this intersectionpoint in Q
3 . . .
4 . . .
p
s s′
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 If s′ and its new left neighbor in
T intersect below the sweepline, then insert this intersectionpoint in Q
3 If s and its new right neighborin T intersect below the sweepline, then insert this intersectionpoint in Q
4 . . .
p
s s′
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25

Event handling
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 If s′ and its new left neighbor in
T intersect below the sweepline, then insert this intersectionpoint in Q
3 If s and its new right neighborin T intersect below the sweepline, then insert this intersectionpoint in Q
4 Report the intersection point
p
s s′
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 25
Event handling
Line segment intersectionPlane sweepSubdivisions
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
p
s
s′
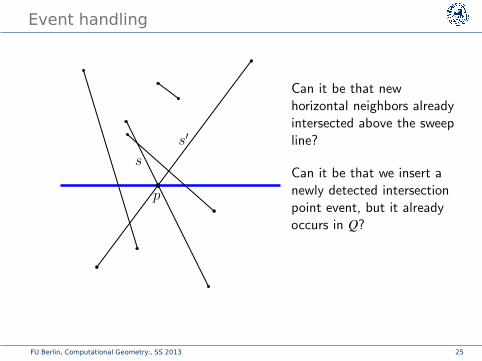
Can it be that newhorizontal neighbors alreadyintersected above the sweepline?
Can it be that we insert anewly detected intersectionpoint event, but it alreadyoccurs in Q?
Insert events only once!
Geometric Algorithms Lecture 2: Line segment intersection and subdivisions
,FU Berlin, Computational Geometry:, SS 2013 25
Event handling
Line segment intersectionPlane sweepSubdivisions
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
p
s
s′
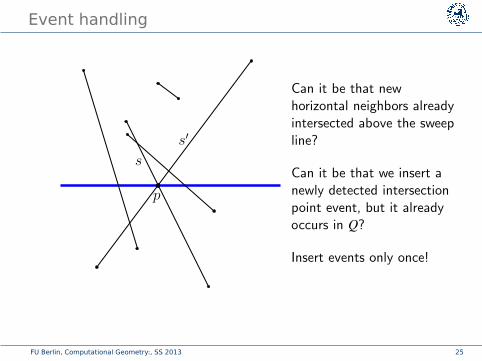
Can it be that newhorizontal neighbors alreadyintersected above the sweepline?
Can it be that we insert anewly detected intersectionpoint event, but it alreadyoccurs in Q?
Insert events only once!
Geometric Algorithms Lecture 2: Line segment intersection and subdivisions
,FU Berlin, Computational Geometry:, SS 2013 25
Efficiency
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
How much time to handle an event?
At most one search in T and/or one insertion, deletion, orswap
At most twice finding a neighbor in T
At most one deletion from and two insertions in Q
Since T and Q are balanced binary search trees, handling anevent takes only O(logn) time
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 26

Efficiency
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
How many events?
2n for the upper and lower endpoints
k for the intersection points, if there are k of them
In total: O(n+ k) events
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 26

Efficiency
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Initialization takes O(n logn) time (to put all upper and lowerendpoint events in Q)
Each of the O(n+ k) events takes O(logn) time
The algorithm takes O(n logn+ k logn) time
If k = O(n), then this is O(n logn)
Note that if k is really large, the brute force O(n2) timealgorithm is more efficient
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 26

Efficiency
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Question: How much storage does the algorithm take?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 26

Efficiency
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Question: Given that the event list is a binary tree that maystore O(k) = O(n2) events, is the efficiency in jeopardy?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 26

Efficiency
Line segment intersectionPlane sweepSubdivisions
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Solution:Only store intersection points of currently adjacent segments.
Geometric Algorithms Lecture 2: Line segment intersection and subdivisions
,FU Berlin, Computational Geometry:, SS 2013 26

Assignment: degenerate cases
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Degenerate cases
How do we deal with degenerate cases?
For two different events with the same y-coordinate, we treatthem from left to right ⇒ the “upper” endpoint of ahorizontal line segment is its left endpoint
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 27

Assignment: degenerate cases
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Degenerate cases
How about multiply coinciding event points?
p
Let U(p) and L(p) be the line segments that have p as upperand lower endpoint, and C(p) the ones that contain p
Question: How do we handle this multi-event?
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 27

Plane sweep - conclusion
MotivationLine segment intersection
Plane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Conclusion
For every sweep algorithm:
Define the status
Choose the status structure and the event list
Figure out how events must be handled (with sketches!)
To analyze, determine the number of events and howmuch time they take
Then deal with degeneracies
Computational Geometry Lecture 2: Line segment intersection for map overlay
,FU Berlin, Computational Geometry:, SS 2013 28

Alternative assignment
Program the plane sweep algorithm for finding line segmentintersections!
,FU Berlin, Computational Geometry:, SS 2013 29

Assignment 3
http:
//page.mi.fu-berlin.de/panos/cg13/exercises/u03.pdf
Due: 29/04!
,FU Berlin, Computational Geometry:, SS 2013 30

CGAL and Google Summer of Code
Program some geometric algorithm in CGAL, for 3 months in thesummer, and get paid for it (5000 Euros..)
,FU Berlin, Computational Geometry:, SS 2013 31


















