
Computation of Scattering Clusters of Spheres … of Scattering Clusters of Spheres Using ......
31
Computation of Scattering Clusters of Spheres Using the Fast Multipole Method Nail A. Gumerov Ramani Duraiswami Institute for Advanced Computer Studies University of Maryland at College Park www.umiacs.umd.edu/~gumerov www.umiacs.umd.edu/~ramani This study has been supported by NSF Outline Introduction Problem Formulation Method of Solution Multipole Reexpansion (T-matrix) Method Iterative Methods Fast Multipole Method Results of Computations Conclusion
Transcript of Computation of Scattering Clusters of Spheres … of Scattering Clusters of Spheres Using ......

Computation of Scattering Clusters of Spheres Using the Fast Multipole Method
Nail A. Gumerov Ramani Duraiswami
Institute for Advanced Computer StudiesUniversity of Maryland at College Parkwww.umiacs.umd.edu/~gumerovwww.umiacs.umd.edu/~ramaniThis study has been supported by NSF
Outline
IntroductionProblem FormulationMethod of Solution
Multipole Reexpansion (T-matrix) MethodIterative MethodsFast Multipole Method
Results of ComputationsConclusion

Introduction
Multiple Scattering Problems
Sound propagation in disperse media (particles, bubbles, etc.)
Modeling of scattering from environment (humans, animals, fish, etc.)
Electromagnetic scattering problems (microwaves, optics, etc.)
Efficient parametrization in inverse problems (tomography, etc.)
Introduction
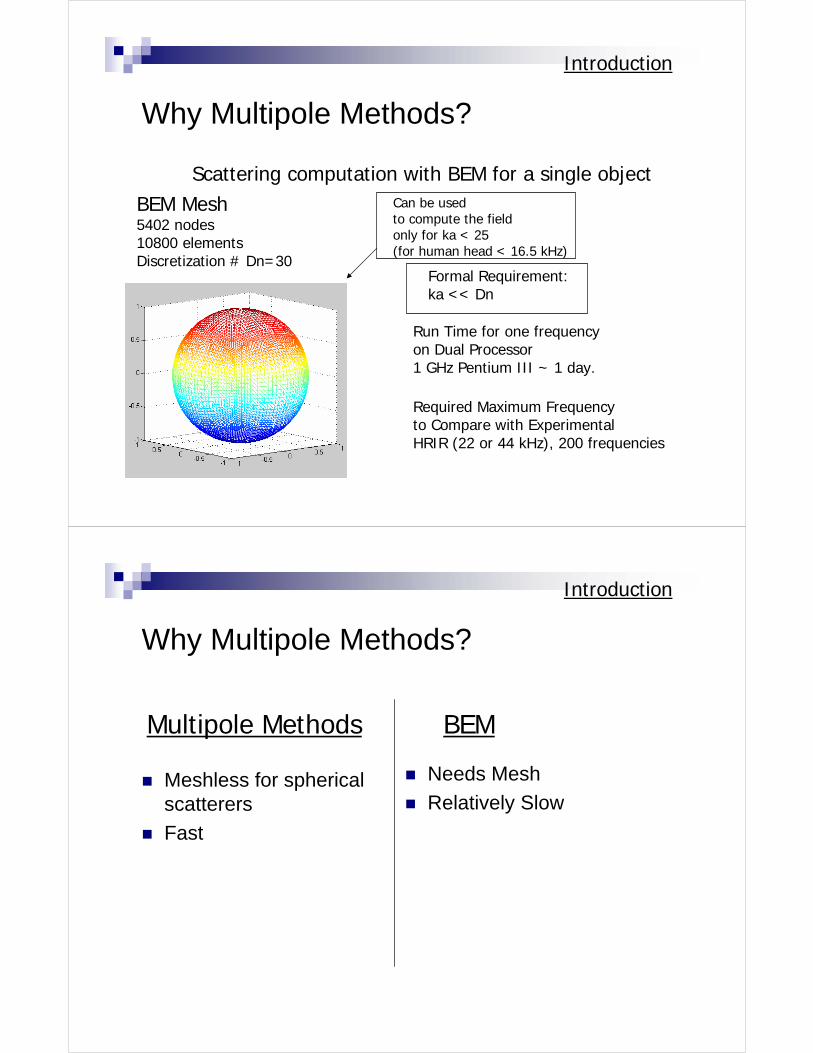
Why Multipole Methods?
Introduction
BEM Mesh5402 nodes10800 elementsDiscretization # Dn=30
Can be usedto compute the fieldonly for ka < 25 (for human head < 16.5 kHz)
Run Time for one frequencyon Dual Processor1 GHz Pentium III ~ 1 day.
Required Maximum Frequency to Compare with ExperimentalHRIR (22 or 44 kHz), 200 frequencies
Formal Requirement:ka << Dn
Scattering computation with BEM for a single object
Why Multipole Methods?
Meshless for spherical scatterers
Fast
Needs Mesh
Relatively Slow
Introduction
Multipole Methods BEM
Problem Formulation
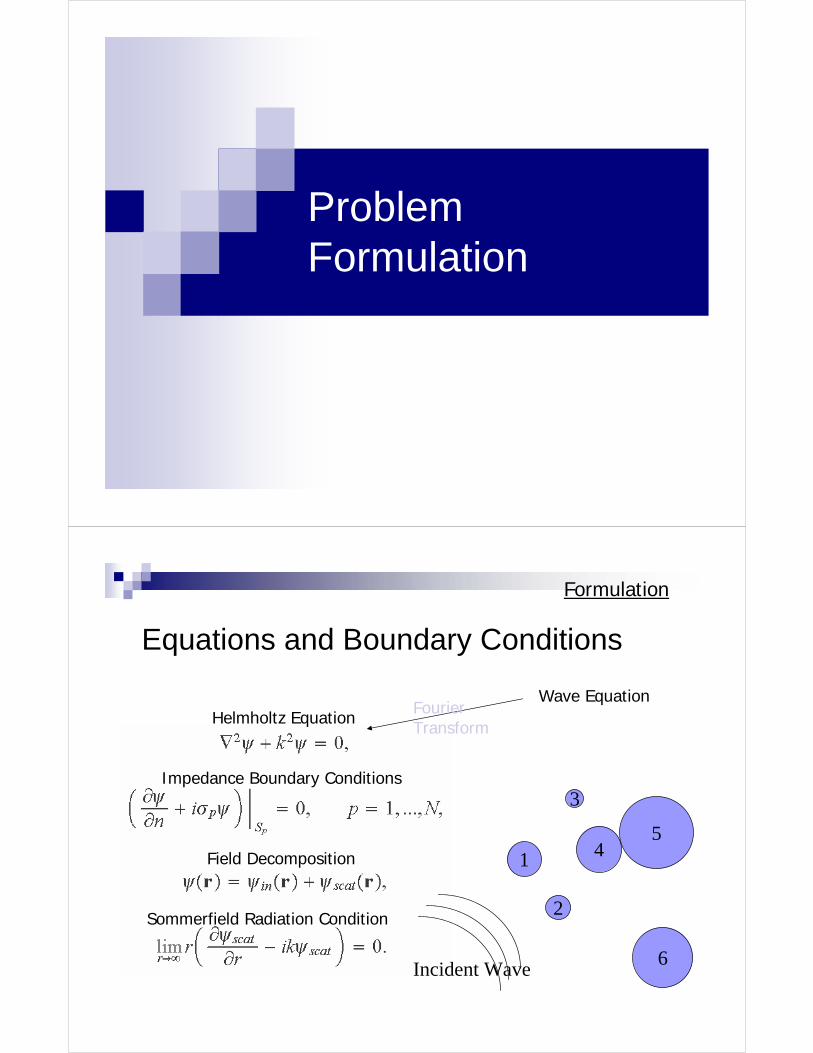
Equations and Boundary Conditions
Helmholtz Equation
Impedance Boundary Conditions
Field Decomposition
Sommerfield Radiation Condition
4
2
1
6
5
3
Incident Wave
Formulation
Wave EquationFourierTransform
Multipole Reexpansion(T-Matrix) Method
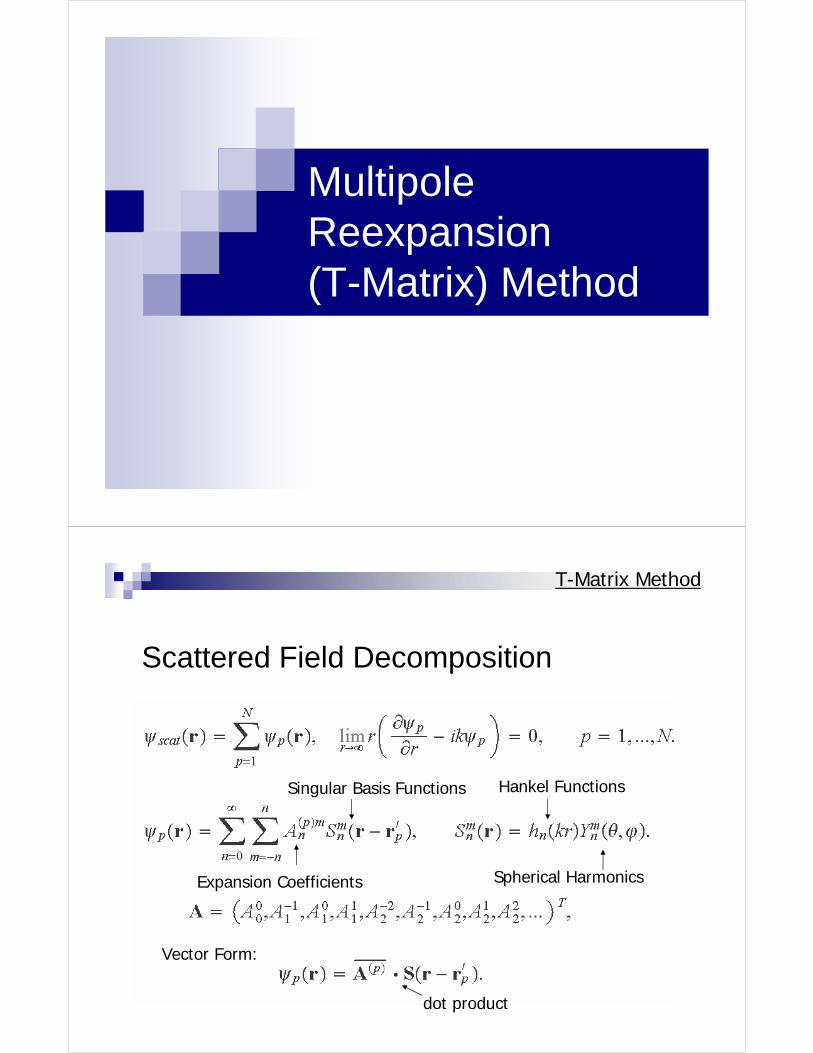
Scattered Field Decomposition
T-Matrix Method
Expansion Coefficients
Singular Basis Functions Hankel Functions
Spherical Harmonics
Vector Form:
dot product

Incident Field Decompositionand T-matrix for a Single Sphere
T-Matrix Method
Regular Basis Functions Bessel Functions
Analytical Solution of the Problem:
T-matrix
Isosurfaces For Regular Basis Functions
n
m

Isosurfaces For Singular Basis Functions
n
m
Solution of Multiple Scattering Problem
T-Matrix Method
4
2
1
6
5
3
Incident Wave
Scattered Wave
Coupled System of Equations:
(S|R)-TranslationMatrix
“Effective” Incident Field
Reexpansions/Translations
T-Matrix Method
q
p
M
O
rp
rq
r’pr’q
r’pq
r q
p
M
O
rp
rq
r’pr’q
r’pq
r
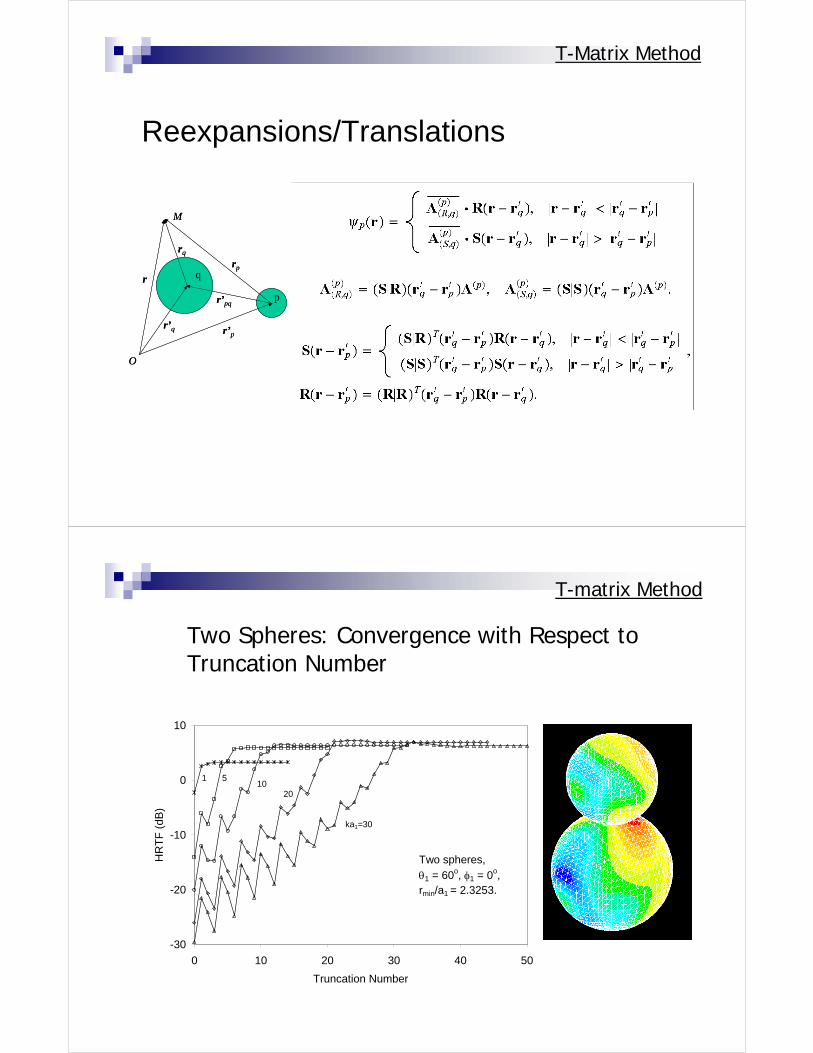
Two Spheres: Convergence with Respect to Truncation Number
T-matrix Method
-30
-20
-10
0
10
0 10 20 30 40 50
Truncation Number
HR
TF
(dB
)
ka1=30
5110
20
Two spheres,
θ1 = 60o, φ1 = 0o,rmin/a1 = 2.3253.
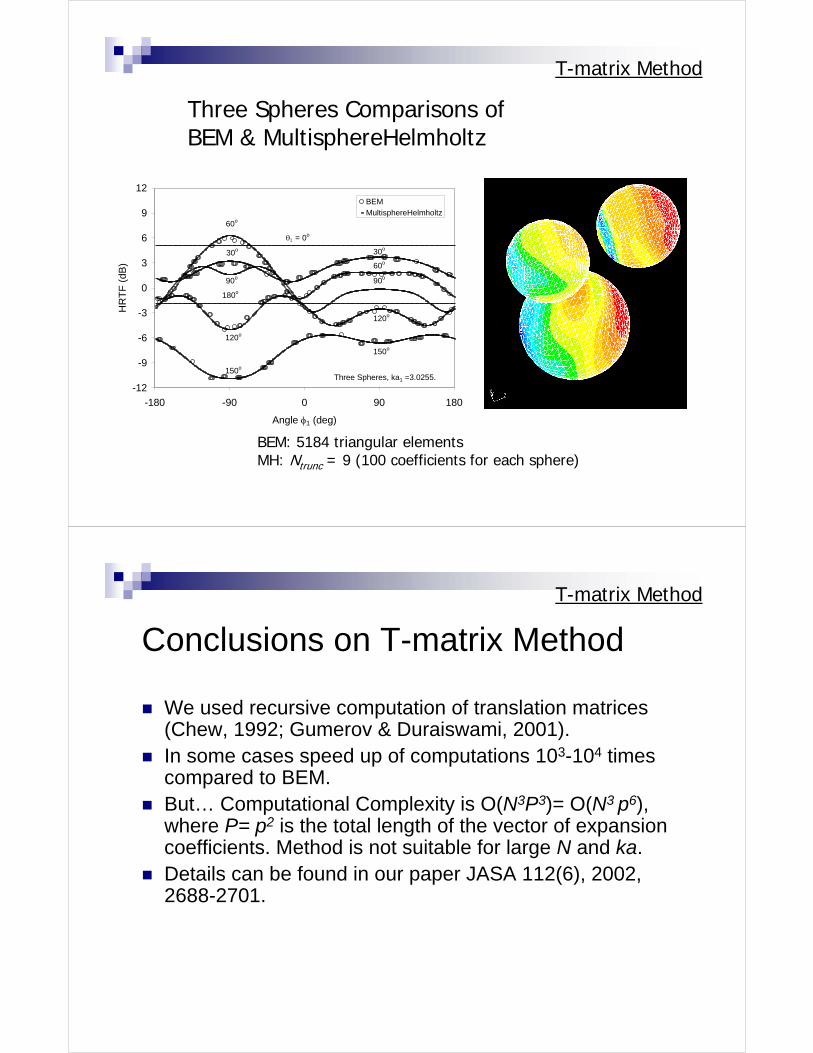
Three Spheres Comparisons ofBEM & MultisphereHelmholtz
T-matrix Method
BEM: 5184 triangular elementsMH: Ntrunc = 9 (100 coefficients for each sphere)
-12
-9
-6
-3
0
3
6
9
12
-180 -90 0 90 180
Angle φ1 (deg)
HR
TF
(dB
)
BEM
MultisphereHelmholtz
θ1 = 0o
30o
60o
90o
60o
30o
90o
120o
120o
150o
150o
180o
Three Spheres, ka1 =3.0255.
Conclusions on T-matrix Method
We used recursive computation of translation matrices (Chew, 1992; Gumerov & Duraiswami, 2001). In some cases speed up of computations 103-104 times compared to BEM.But… Computational Complexity is O(N3P3)= O(N3 p6), where P= p2 is the total length of the vector of expansion coefficients. Method is not suitable for large N and ka.Details can be found in our paper JASA 112(6), 2002, 2688-2701.
T-matrix Method
Iterative Methods
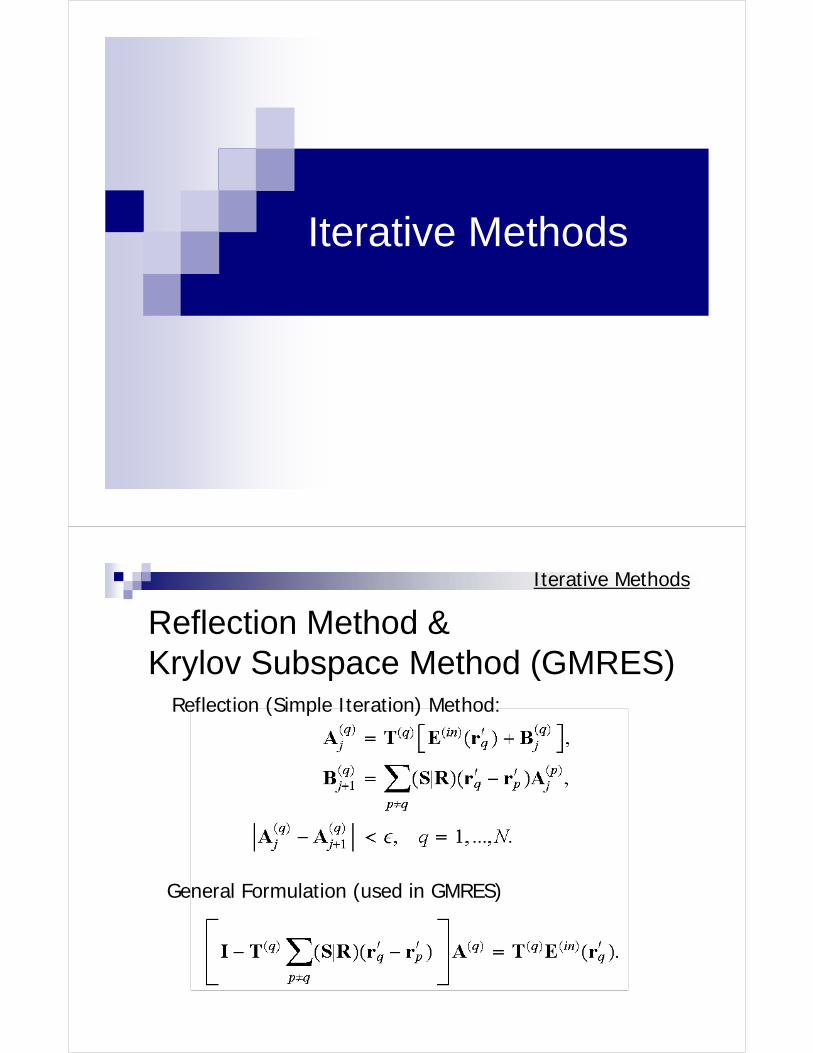
Reflection Method & Krylov Subspace Method (GMRES)
Reflection (Simple Iteration) Method:
General Formulation (used in GMRES)
Iterative Methods

Convergence of Reflection Iteration Method
Iterative Methods
Exponential Convergence
Conclusions on Iterative Methods
Both the Reflection Method (RM) and the GMRES converge well, while the RM is simpler and faster;Some problems in convergence were found for larger ka and regular spacing of the scatterers;In iterative methods fast translation algorithms can be used (weused O(p3)=O(P3/2) fast translation based on sparse matrix decomposition of translation operators). This cost potentially can be reduced further (we are working on O(PlogP) methods).Complexity of Iterative Methods in this case O(N2Niter p3); Savings in complexity compared to straightforward T-matrix are O(p3
N/Niter)For N~200, Niter~20, p~10 (P~100) this yields of order 104 times savings.
Iterative Methods

Fast Multipole Method
Some Facts on the Fast Multipole Methods (FMM)
Introduced by Rokhlin & Greengard (1987,1988) for computation of 2D and 3D fields for Laplace Equation;Reduces complexity of matrix-vector product from O(N2) to O(N)or O(NlogN) (depends on data structure);Hundreds of publications for various 1D, 2D, and 3D problems (Laplace, Helmholtz, Maxwell, Yukawa Potentials, etc.);Application to acoustical scattering problems (Koc & Chew, 1998; JASA);We taught the first in the country course on FMM fundamentals & application at the University of Maryland (2002,2003);Some technical reports are available online;A book on the FMM for the 3D Helmholtz equation submitted to Academic Press.
FMM

Far and Near FieldsFMM
Neighborhood(Near Field)
Far Field
Max Level of Space Subdivision

Translations
Ω1
Ω2
x*1
x*2R (R|R)
x R
Ωr(x*)
x*
(R|R)
y x*+tt
r
Ωr1(x*+t)
r1
xi
Ω1
Ω2x*1
x*2
S
(S|S)
S
xi
x*x*+t
(S|S)
y
t
Ωr1(x*+t) Ωr(x*)
rr1
xi
Ω1
x*1x*2
S
(S|S)
S
xi
x*
x*+t
(S|R)
y
t
Ωr1(x*+t)
r
r1
R|R S|S S|R
FMM
Problem:For the Helmholtz equation absolute and uniform convergence can be achieved only for
p > ka. For large ka the FMM with constant p isvery expensive (comparable with straightforward methods);
inaccurate (since keeps much larger number of terms than required, which causes numerical instabilities).
a
ExpansionDomain
D
2a=31/2D

Model of Truncation Number Behavior for Fixed Error
p
ka0 ka*
p*
In the multilevel FMM we associate its own pl
with each level l:
“Breakdown level”
Box size at level l
Complexity of Single Translation
Translation exponent
Spatially Uniform Data Distributions
Constant!
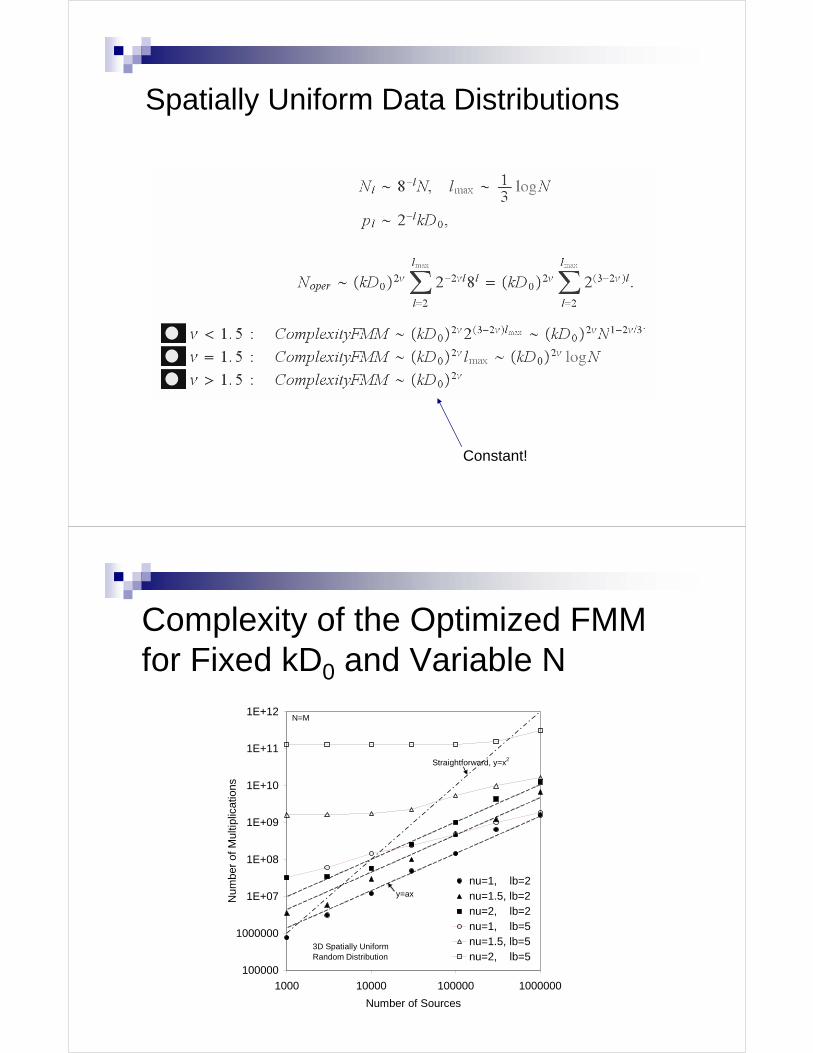
Complexity of the Optimized FMM for Fixed kD0 and Variable N
100000
1000000
1E+07
1E+08
1E+09
1E+10
1E+11
1E+12
1000 10000 100000 1000000
Number of Sources
Num
ber
of
Mul
tiplic
atio
ns
nu=1, lb=2nu=1.5, lb=2nu=2, lb=2nu=1, lb=5nu=1.5, lb=5nu=2, lb=5
Straightforward, y=x2
3D Spatially Uniform Random Distribution
N=M
y=ax

Optimum Level for Low Frequencies
0.00001
0.0001
0.001
0.01
0.1
1
10
100
2 3 4 5 6 7
Max Level of Space Subdivision
Num
ber
of M
ultip
licat
ions
, x10
e11
N=M=10000003D Spatially Uniform Random Distribution
Direct Summation
Translation
Total
nu=1
1.5
2
2
1.5
1
Volume Element Methods
Ns
wavelength
D0 = D0 k/(2π) wavelengths = N1/3 sourcesCritical Translation Exponent!
computational domain

What Happens if Truncation Number is Constant for All Levels?
“Catastrophic Disaster of the FMM”
Source Expansion Errors
rs
r
ab
rs
r
ab0 0
rs
r
ab
rs
r
ab0 0
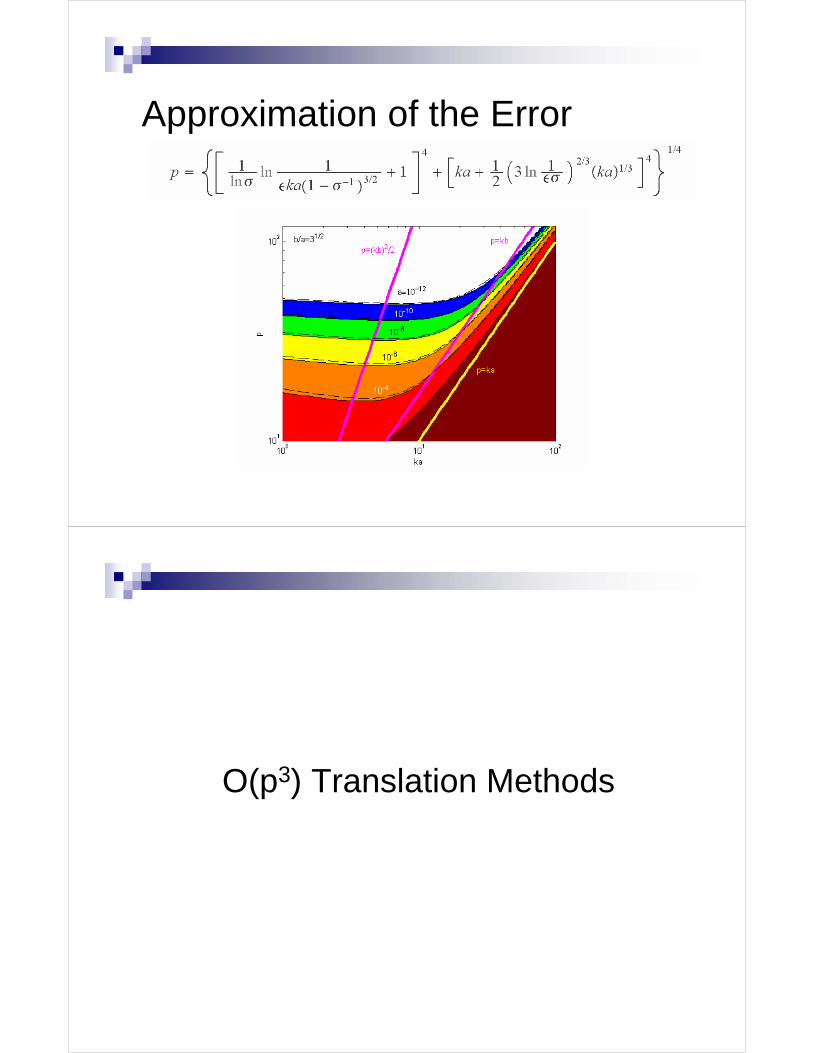
Approximation of the Error
O(p3) Translation Methods
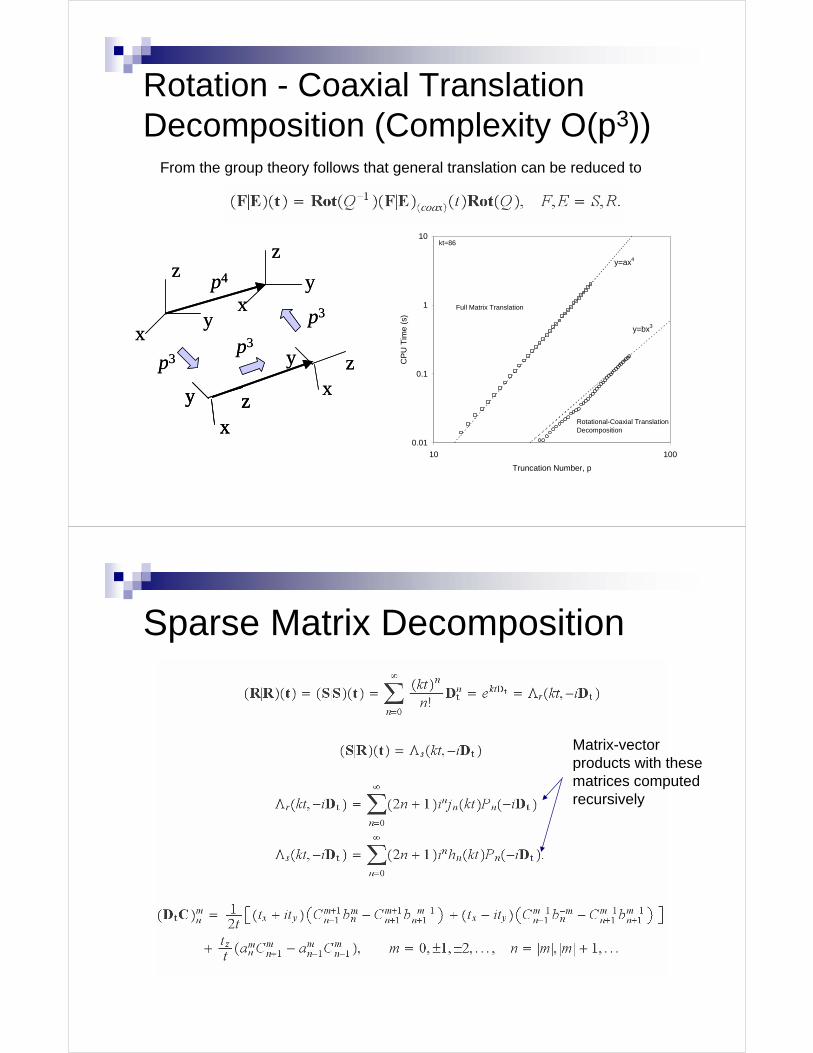
Rotation - Coaxial Translation Decomposition (Complexity O(p3))
z
y
y
x
x
y
xz
y
xz
z
p4
p3p3
p3
z
y
y
x
x
y
xzy
xz
y
xz
z
p4
p3p3
p3
From the group theory follows that general translation can be reduced to
0.01
0.1
1
10
10 100
Truncation Number, p
CP
U T
ime
(s)
Full Matrix Translation
Rotational-Coaxial Translation Decomposition
y=ax4
y=bx3
kt=86
Sparse Matrix Decomposition
Matrix-vector products with these matrices computed recursively
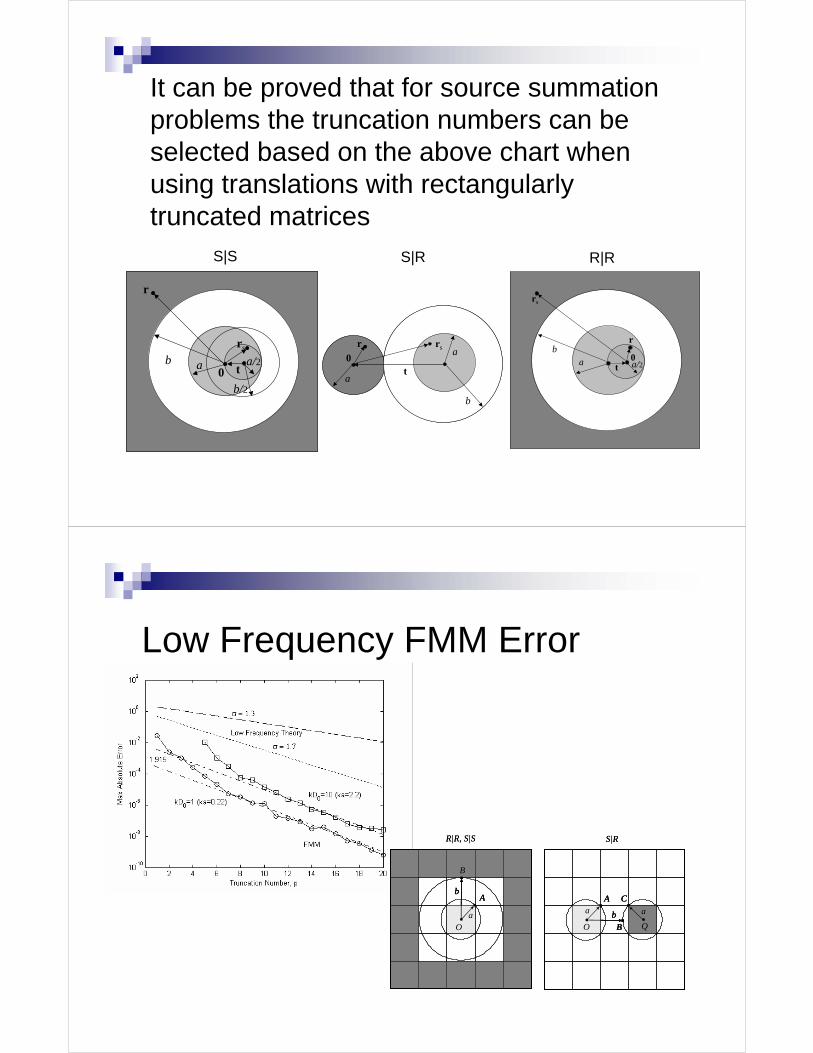
It can be proved that for source summation problems the truncation numbers can be selected based on the above chart when using translations with rectangularlytruncated matrices
r
ab0
rs
a/2t
b/2
r
ab0
rs
a/2t
b/2
ra
b
0
rs
ta
ra
b
0
rs
ta
r
ab
rs
a/2t0
r
ab
rs
a/2t0
S|S S|R R|R
Low Frequency FMM Error
a
b
O
A
B
ab
C
B
a
O
A
Q
R|R, S|S S|R
a
b
O
A
B
ab
C
B
a
O
A
Qa
b
O
A
B
ab
C
B
a
O
A
Q
R|R, S|S S|R
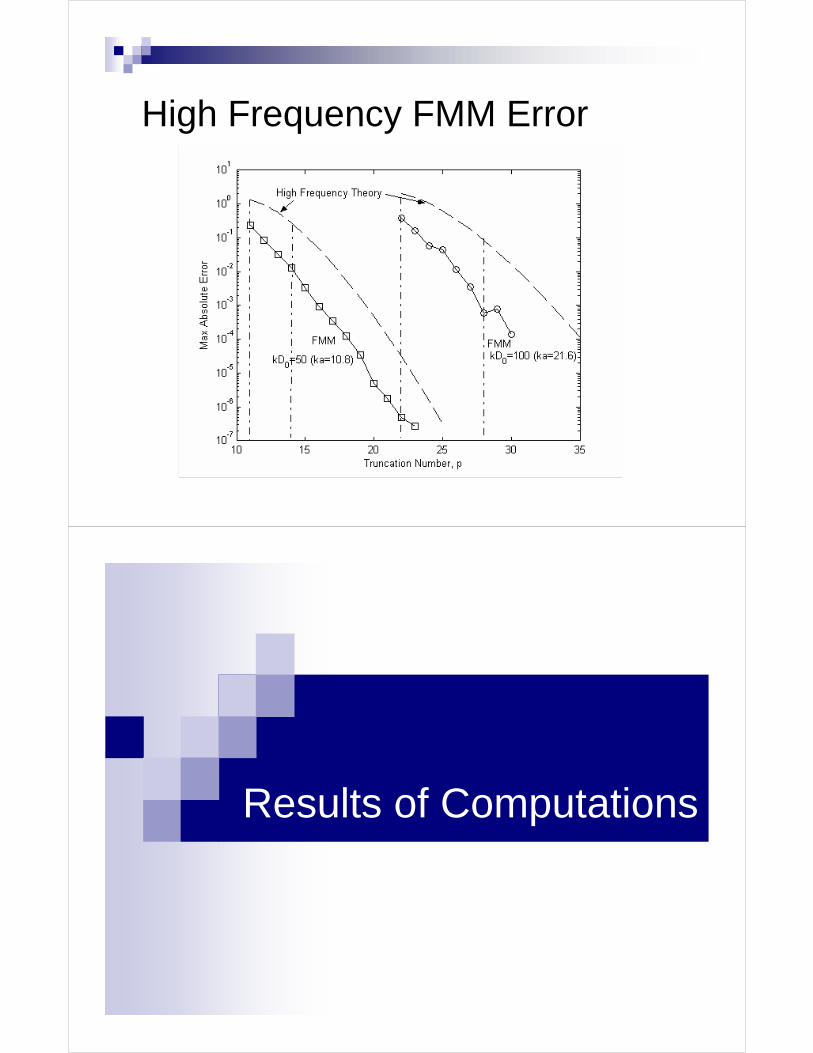
High Frequency FMM Error
Results of Computations

Range of Parameters
Number of Spheres: 1-104;
ka: 0.1-10; kD0: 1-100;
Random and regularly spaced grids of spheres;
Polydispersity: 0.5-1.5 (ratio to the mean radius);
Volume fractions: 0.01-0.2;
Results
Advantages and Defficiencies of Our FMM Implementation
O(NlogN) “On fly” computation of neighbor lists, using bit interleaving;
Low memory: one can trade memory for speed;Rotation-Coaxial Translation Decomposition, Operations with Multipole Expansion Coefficients;
For high frequencies some other methods (diagonal forms, asymptotic methods) can be used; Some additional complexity: conversion to the space of expansion coefficients;
No precomputation of translation and rotation matrices; Low memory: one can trade memory for speed;
For larger problem size the GMRES is more efficient than the Reflection Method;
User can switch, but the GMRES can be used as default.Krylov subspace dimensionalities usually low (of order 10-30).
This implementation is not perfect, but works!

Some Configurations
343 640 1000343 640 1000
Surface Potential Imaging
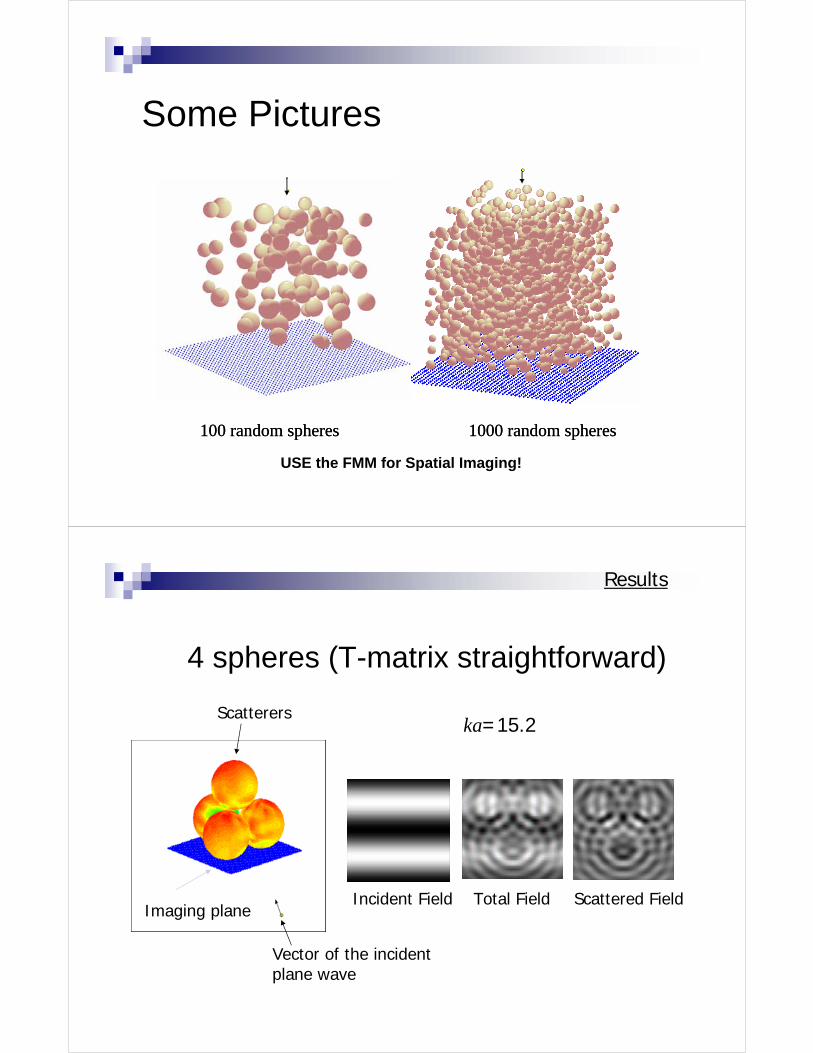
Some Pictures
100 random spheres 1000 random spheres100 random spheres 1000 random spheres
USE the FMM for Spatial Imaging!
4 spheres (T-matrix straightforward)
Results
Vector of the incidentplane wave
Imaging plane
Scattererska=15.2
Incident Field Total Field Scattered Field
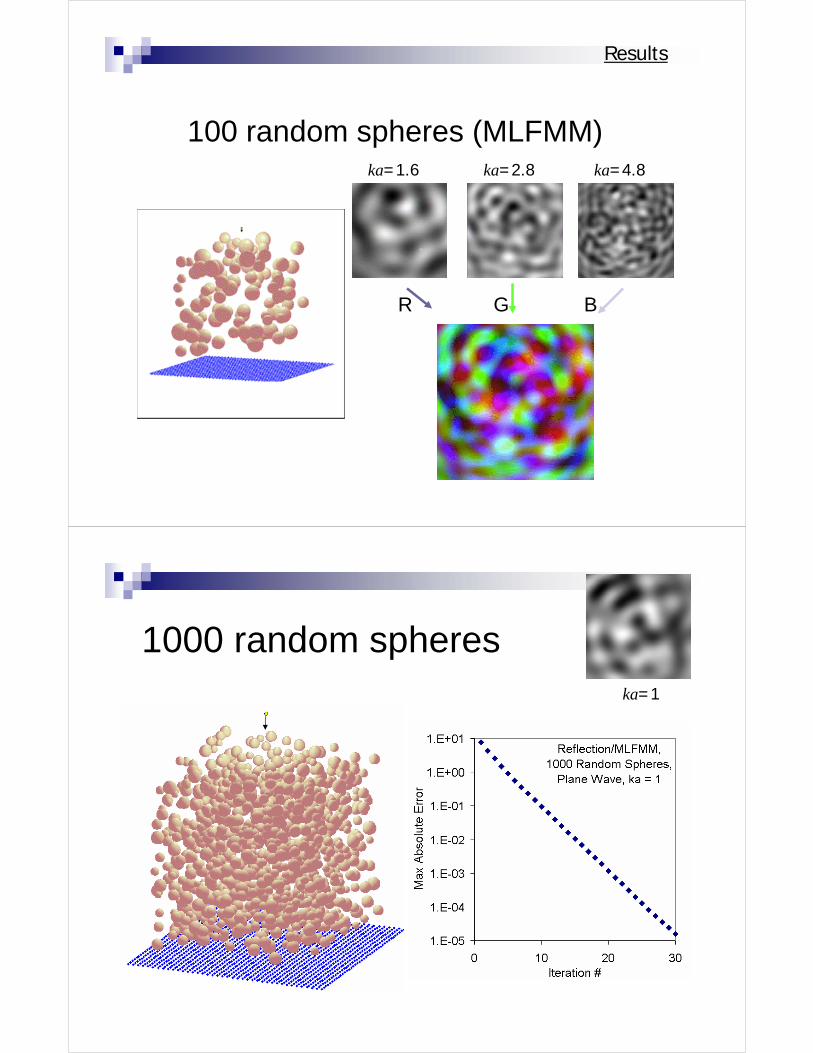
100 random spheres (MLFMM)
Results
ka=1.6 ka=4.8ka=2.8
R G B
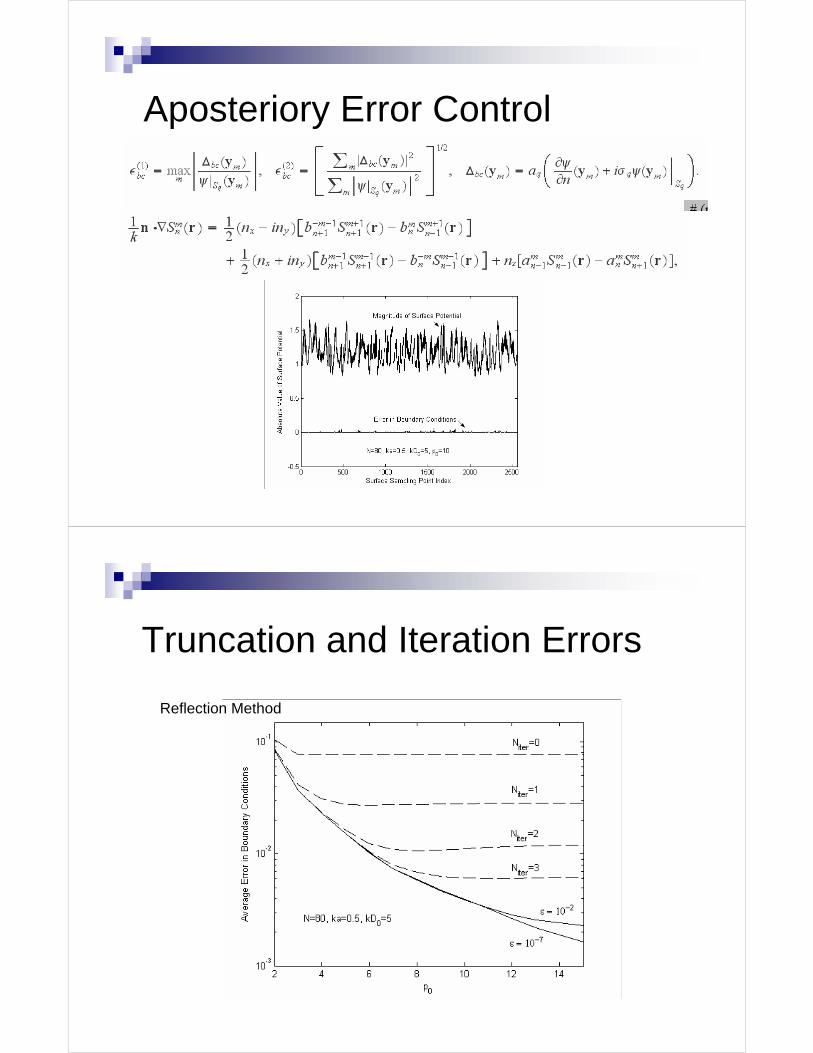
1000 random sphereska=1
Aposteriory Error Control
Truncation and Iteration Errors
Reflection Method

Convergence for 100 spheres (MLFMM)
Results
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
1.E+01
1.E+02
0 5 10 15 20 25 30 35Iteration #
Ma
x A
bs
olu
te E
rro
r
Iterations with Reflection Method
3D Helmholtz Equation,MLFMM100 Spheres
ka = 4.8
2.8 1.6
Convergence for Different N
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
0 10 20 30 40 50 60
Iteration Number
Max
Abs
olut
e E
rror
N=80, kD=5
N=640, kD=11
N=2160, kD=17
N=5120, kD=23
N=10000, kD=29
10000
80640 2160
5120
Periodically-Random Spatial Distributionof Spheres of Equal Size
GMRES +FMM
Volume Fraction = 0.2, ka=0.5
1
10
100
10 100 1000 10000Number of Scatterers
Num
ber
of It
erat
ions
Linear

GMRES vs Reflection
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
1.E+01
0 10 20 30 40 50 60
Iteration Number
80
640
N=2160
Reflection
GMRES
CPU Time Per Iteration
Dual Xeon 3.2GHz,3.5 GB RAM,25% resources utilized
0.1
1
10
100
1000
10 100 1000 10000 100000
Number of Scatterers
CP
U T
ime
Per
Iter
atio
n (s
)
y=axVolume Fraction = 0.2, ka=0.5
Periodically-Random Spatial Distributionof Spheres of Equal Size
FMM
l = 2max
2
3
4 4y=bx2
Direct
Overall Performance
Dual Xeon 3.2GHz,3.5 GB RAM,25% resources utilized
1
10
100
1000
10000
100000
10 100 1000 10000 100000
Number of Scatterers
CP
U T
ime
(s)
Volume Fraction = 0.2, ka=0.5
Periodically-Random Spatial Distributionof Spheres of Equal Size
GMRES +FMM
Straightforward
y=cx3 GMRES+Direct
y=bx2
y=ax
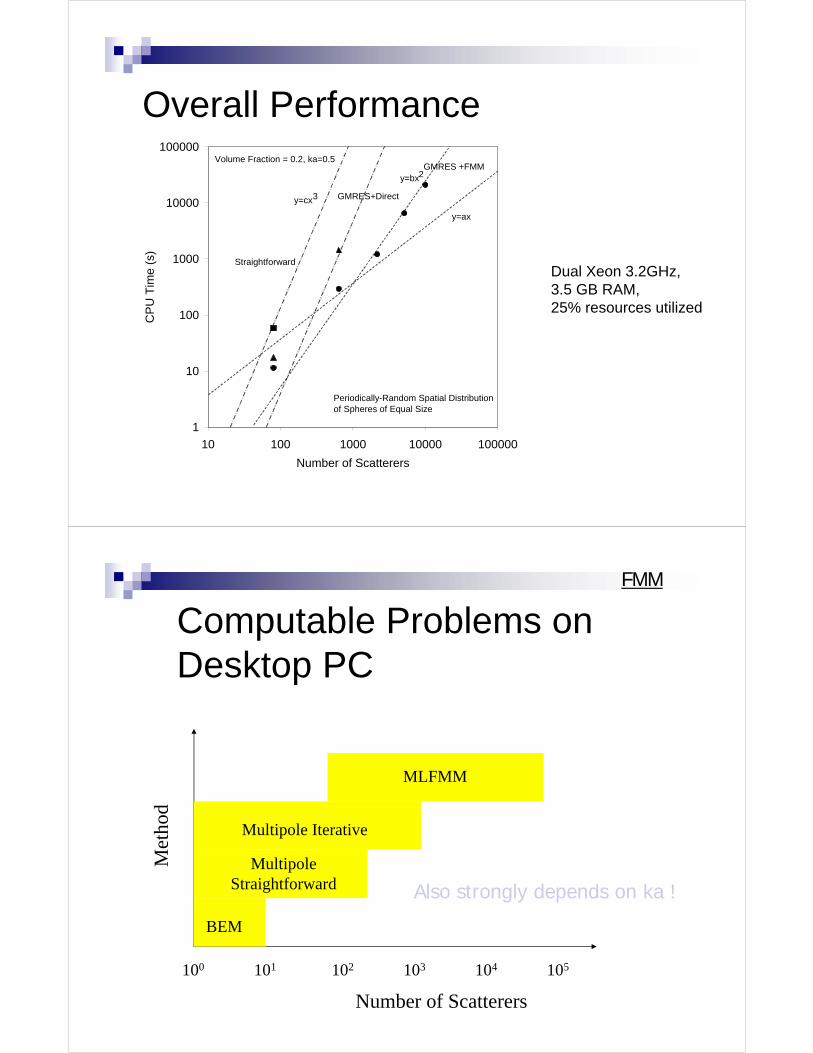
Computable Problems on Desktop PC
FMM
Met
hod
Number of Scatterers
101 102 103100 104 105
BEM
Multipole Straightforward
Multipole Iterative
MLFMM
Also strongly depends on ka !

Conclusions
We developed, implemented, and tested the Multilevel Fast Multipole Method for computation of multiple scattering problems.Performance of the method depends on a number of controlling parameters. At proper selection of these parameters fast and accurate results can be achieved.Some convergence problems in iterative methods were observed for short wave propagation in regularly spaced sphere grids. This may be due to some internal resonances, which should be investigated.
Future work
Development of faster translation algorithms, covering higher frequencies;Extension for non-spherical scatterrers;Comparisons with continuum (averaging) theories and theories of wave propagation in random media;Computations of acoustic fields in disperse systems (bubbly liquids, particulate systems);Comparisons with experimental data.


















