Composite adaptive control for Euler–Lagrange systems with...
8
Automatica 46 (2010) 140–147 Contents lists available at ScienceDirect Automatica journal homepage: www.elsevier.com/locate/automatica Brief paper Composite adaptive control for Euler–Lagrange systems with additive disturbances ✩ Parag M. Patre, William MacKunis, Marcus Johnson, Warren E. Dixon * Department of Mechanical and Aerospace Engineering, University of Florida, Gainesville, FL 32611, USA article info Article history: Received 28 October 2008 Received in revised form 18 September 2009 Accepted 29 September 2009 Available online 10 November 2009 Keywords: Composite adaptation RISE Nonlinear control Lyapunov-based control abstract In a typical adaptive update law, the rate of adaptation is generally a function of the state feedback error. Ideally, the adaptive update law would also include some feedback of the parameter estimation error. The desire to include some measurable form of the parameter estimation error in the adaptation law resulted in the development of composite adaptive update laws that are functions of a prediction error and the state feedback. In all previous composite adaptive controllers, the formulation of the prediction error is predicated on the critical assumption that the system uncertainty is linear in the uncertain parameters (LP uncertainty). The presence of additive disturbances that are not LP would destroy the prediction error formulation and stability analysis arguments in previous results. In this paper, a new prediction error formulation is constructed through the use of a recently developed Robust Integral of the Sign of the Error (RISE) technique. The contribution of this design and associated stability analysis is that the prediction error can be developed even with disturbances that do not satisfy the LP assumption (e.g., additive bounded disturbances). A composite adaptive controller is developed for a general MIMO Euler–Lagrange system with mixed structured (i.e., LP) and unstructured uncertainties. A Lyapunov-based stability analysis is used to derive sufficient gain conditions under which the proposed controller yields semi-global asymptotic tracking. Experimental results are presented to illustrate the approach. © 2009 Elsevier Ltd. All rights reserved. 1. Introduction Adaptive, robust adaptive, and function approximation meth- ods typically use tracking error feedback to update the adaptive estimates. In general, the use of the tracking error is motivated by the need for the adaptive update law to cancel cross-terms in the closed-loop tracking error system within a Lyapunov-based analy- sis. As the tracking error converges, the rate of the update law also converges, but drawing conclusions about the convergent value (if any) of the parameter update law is problematic. Ideally, the adaptive update law would include some estimate of the param- eter estimation error as a means to prove the parameter estimates ✩ This research is supported in part by the NSF CAREER award 0547448. The authors would like to acknowledge the support of the Department of Energy, grant number DE-FG04-86NE37967. This work was accomplished as part of the DOE University Research Program in Robotics (URPR). A preliminary version of this paper appeared in the American Control Conference, June 10–12, 2009, St. Louis, Missouri, USA. This paper was recommended for publication in revised form by Associate Editor Andrea Serrani under the direction of Editor Miroslav Krstic. * Corresponding address: Department of Mechanical and Aerospace Engineering, University of Florida, Rm 312 MAE-A P.O. Box 116250 Gainesville, FL 32611-6205, USA. Tel.: +1 352 846 1463; fax: +1 352 392 7303. E-mail addresses: [email protected] (P.M. Patre), [email protected] (W. MacKunis), [email protected] (M. Johnson), [email protected] (W.E. Dixon). converge to the actual values; however, the parameter estimate er- ror is unknown. The desire to include some measurable form of the parameter estimation error in the adaptation law resulted in the development of adaptive update laws that are driven, in part, by a prediction error (Middleton & Goodwin, 1988; Morse, 1980; Pomet & Praly, 1988; Sastry & Isidori, 1989; Slotine & Li, 1991) and also Q-modification techniques (Volyanskyy, Calise, & Yang, 2006; Volyanskyy, Haddad, & Calise, 2008). The prediction error is defined as the difference between the predicted parameter estimate value and the actual system uncer- tainty. Including feedback of the estimation error in the adaptive update law enables improved parameter estimation. For example, some classic results (Krstic, Kanellakopoulos, & Kokotovic, 1995; Krstic & Kokotovic, 1995; Slotine & Li, 1991) have proven the pa- rameter estimation error is square integrable and that the param- eter estimates may converge to the actual uncertain parameters. Since the prediction error depends on the unmeasurable system uncertainty, the swapping lemma (Middleton & Goodwin, 1988; Morse, 1980; Pomet & Praly, 1988; Sastry & Isidori, 1989; Slo- tine & Li, 1991) is central to the prediction error formulation. The swapping technique (also described as input or torque filter- ing in some literature) transforms a dynamic parametric model into a static form where standard parameter estimation techniques can be applied. In Krstic and Kokotovic (1995) and Krstic et al. (1995), a nonlinear extension of the swapping lemma was de- 0005-1098/$ – see front matter © 2009 Elsevier Ltd. All rights reserved. doi:10.1016/j.automatica.2009.10.017
Transcript of Composite adaptive control for Euler–Lagrange systems with...

Automatica 46 (2010) 140–147
Contents lists available at ScienceDirect
Automatica
journal homepage: www.elsevier.com/locate/automatica
Brief paper
Composite adaptive control for Euler–Lagrange systems withadditive disturbancesI
Parag M. Patre, William MacKunis, Marcus Johnson, Warren E. Dixon ∗Department of Mechanical and Aerospace Engineering, University of Florida, Gainesville, FL 32611, USA
a r t i c l e i n f o
Article history:Received 28 October 2008Received in revised form18 September 2009Accepted 29 September 2009Available online 10 November 2009
Keywords:Composite adaptationRISENonlinear controlLyapunov-based control
a b s t r a c t
In a typical adaptive update law, the rate of adaptation is generally a function of the state feedback error.Ideally, the adaptive update law would also include some feedback of the parameter estimation error.The desire to include some measurable form of the parameter estimation error in the adaptation lawresulted in the development of composite adaptive update laws that are functions of a prediction errorand the state feedback. In all previous composite adaptive controllers, the formulation of the predictionerror is predicated on the critical assumption that the system uncertainty is linear in the uncertainparameters (LP uncertainty). The presence of additive disturbances that are not LP would destroy theprediction error formulation and stability analysis arguments in previous results. In this paper, a newprediction error formulation is constructed through the use of a recently developed Robust Integral ofthe Sign of the Error (RISE) technique. The contribution of this design and associated stability analysis isthat the prediction error can be developed even with disturbances that do not satisfy the LP assumption(e.g., additive bounded disturbances). A composite adaptive controller is developed for a general MIMOEuler–Lagrange systemwithmixed structured (i.e., LP) and unstructured uncertainties. A Lyapunov-basedstability analysis is used to derive sufficient gain conditions under which the proposed controller yieldssemi-global asymptotic tracking. Experimental results are presented to illustrate the approach.
© 2009 Elsevier Ltd. All rights reserved.
1. Introduction
Adaptive, robust adaptive, and function approximation meth-ods typically use tracking error feedback to update the adaptiveestimates. In general, the use of the tracking error is motivated bythe need for the adaptive update law to cancel cross-terms in theclosed-loop tracking error systemwithin a Lyapunov-based analy-sis. As the tracking error converges, the rate of the update law alsoconverges, but drawing conclusions about the convergent value(if any) of the parameter update law is problematic. Ideally, theadaptive update law would include some estimate of the param-eter estimation error as a means to prove the parameter estimates
I This research is supported in part by the NSF CAREER award 0547448. Theauthors would like to acknowledge the support of the Department of Energy, grantnumber DE-FG04-86NE37967. This work was accomplished as part of the DOEUniversity Research Program inRobotics (URPR). A preliminary version of this paperappeared in the American Control Conference, June 10–12, 2009, St. Louis, Missouri,USA. This paper was recommended for publication in revised form by AssociateEditor Andrea Serrani under the direction of Editor Miroslav Krstic.∗ Corresponding address: Department ofMechanical and Aerospace Engineering,University of Florida, Rm 312 MAE-A P.O. Box 116250 Gainesville, FL 32611-6205,USA. Tel.: +1 352 846 1463; fax: +1 352 392 7303.E-mail addresses: [email protected] (P.M. Patre), [email protected]
(W. MacKunis), [email protected] (M. Johnson), [email protected] (W.E. Dixon).
0005-1098/$ – see front matter© 2009 Elsevier Ltd. All rights reserved.doi:10.1016/j.automatica.2009.10.017
converge to the actual values; however, the parameter estimate er-ror is unknown. The desire to include some measurable form ofthe parameter estimation error in the adaptation law resulted inthe development of adaptive update laws that are driven, in part,by a prediction error (Middleton & Goodwin, 1988; Morse, 1980;Pomet & Praly, 1988; Sastry & Isidori, 1989; Slotine & Li, 1991) andalso Q-modification techniques (Volyanskyy, Calise, & Yang, 2006;Volyanskyy, Haddad, & Calise, 2008).The prediction error is defined as the difference between the
predicted parameter estimate value and the actual system uncer-tainty. Including feedback of the estimation error in the adaptiveupdate law enables improved parameter estimation. For example,some classic results (Krstic, Kanellakopoulos, & Kokotovic, 1995;Krstic & Kokotovic, 1995; Slotine & Li, 1991) have proven the pa-rameter estimation error is square integrable and that the param-eter estimates may converge to the actual uncertain parameters.Since the prediction error depends on the unmeasurable systemuncertainty, the swapping lemma (Middleton & Goodwin, 1988;Morse, 1980; Pomet & Praly, 1988; Sastry & Isidori, 1989; Slo-tine & Li, 1991) is central to the prediction error formulation.The swapping technique (also described as input or torque filter-ing in some literature) transforms a dynamic parametric modelinto a static formwhere standard parameter estimation techniquescan be applied. In Krstic and Kokotovic (1995) and Krstic et al.(1995), a nonlinear extension of the swapping lemma was de-

P.M. Patre et al. / Automatica 46 (2010) 140–147 141
rived, which was used to develop the modular z-swapping and x-swapping identifiers via an input-to-state stable (ISS) controller forsystems in parametric strict feedback form. The advantages pro-vided by prediction error based adaptive update laws led to sev-eral results that use either the prediction error or a composite ofthe prediction error and the tracking error (cf. Abiko & Hirzinger,2007; Christoforou, 2007; de Queiroz, Dawson, & Agarwal, 1999;Mrad & Majdalani, 2003; Wang & Chen, 2001; Zergeroglu, Dixon,Haste, & Dawson, 1999; Christoforou, 2001 and the referenceswithin).Although prediction error based adaptive update laws have
existed for approximately two decades, no stability result hasbeen developed for systems with additive bounded disturbanceswith the exception of the result in Bartolini, Ferrara, and Stotsky(1999). However, Bartolini et al. (1999) considers a linear timeinvariant system with disturbances and the prediction error isdefined only in the sliding mode while the resulting stability isuniformly ultimately bounded (UUB). In general, the inclusion ofdisturbances reduces the steady-state performance of continuouscontrollers to a UUB result. In addition to a UUB result, theinclusion of disturbances may cause unbounded growth of theparameter estimates (Lewis, Abdallah, & Dawson, 1993) fortracking error-based adaptive update laws without the use ofprojection algorithms or other update law modifications suchas σ -modification (Reed & Ioannou, 1989). Problems associatedwith the inclusion of disturbances are magnified for controlmethods based on prediction error-based update laws becausethe formulation of the prediction error requires the swapping(or control filtering) method. Applying the swapping approach todynamics with additive disturbances is problematic because theunknown disturbance terms also get filtered and included in thefiltered control input. This problemmotivates the question of howcan a prediction error-based adaptive update law be developed forsystems with additive disturbances.To address this motivating question, a general Euler–Lagrange-
like MIMO system is considered with structured and unstructureduncertainties, and a gradient-based composite adaptive updatelaw is developed that is driven by both the tracking errorand the prediction error. The control development is basedon the recent continuous Robust Integral of the Sign of theError (RISE) (Patre, MacKunis, Makkar, & Dixon, 2008) techniquethat was originally developed in Qu and Xu (2002) and Xian,Dawson, de Queiroz, and Chen (2004). The RISE architecture isadopted since this method can accommodate for C2 disturbancesand yield asymptotic stability. For example, the RISE techniquewas used in Cai, de Queiroz, and Dawson (2006) to developa tracking controller for nonlinear systems in the presence ofadditive disturbances and parametric uncertainties. Based onthe well accepted heuristic notion that the addition of systemknowledge in the control structure yields better performance andreduces control effort, model-based adaptive and neural networkfeedforward elements were added to the RISE controller in Patreet al. (2008) and Patre, MacKunis, Kaiser, and Dixon (2008),respectively. In comparison to these approaches that used theRISE method in the feedback component of the controller, theRISE structure is used in both the feedback and feedforwardelements of the control structure to enable, for the first time,the construction of a prediction error in the presence of additivedisturbances. Specifically, since the swapping method will resultin disturbances in the prediction error (the main obstacle thathas previously limited this development), an innovative use ofthe RISE structure is also employed in the prediction error update(i.e., the filtered control input estimate). Sufficient gain conditionsare developed under which this unique double RISE controllerguarantees semi-global asymptotic tracking. Experimental results
are presented to illustrate the performance of the proposedapproach.The paper is organized as follows. Section 2 describes the
dynamic system and the assumptions required for the controldevelopment. Section 3 states the control objective and the definesthe error states. Section 4 presents the control development andintroduces the new RISE-based swapping procedure that is used todefine the prediction error. A Lyapunov-based stability analysis isshown in Section 5 while Section 6 presents experimental resultsthat demonstrate improved performance by the proposedmethod.Conclusions and future work are described in Section 7.
2. Dynamic system
Consider a class of MIMO nonlinear Euler–Lagrange systems ofthe following form:
x(m) = f (x, x, . . . , x(m−1))+ G(x, x, . . . , x(m−2))u+ h (t) (1)
where (·)(i) (t) denotes the ith derivative with respect to time,x(i) (t) ∈ Rn, i = 0, . . . ,m − 1 are the system states, u (t) ∈ Rnis the control input, f
(x, x, . . . , x(m−1)
)∈ Rn and G(x, x, . . . ,
x(m−2)) ∈ Rn×n are unknown nonlinear C2 functions, and h (t) ∈Rn denotes a general nonlinear disturbance (e.g., unmodeledeffects). Throughout the paper, |·| denotes the absolute value ofthe scalar argument, ‖·‖ denotes the standard Euclidean norm fora vector or the induced infinity norm for a matrix.The subsequent development is based on the assumption
that all the system states are measurable outputs. Moreover,the following assumptions will be exploited in the subsequentdevelopment.
Assumption 1. G (·) is symmetric positive definite, and satisfiesthe following inequality ∀y(t) ∈ Rn:
g ‖y‖2 ≤ yTG−1y ≤ g(x, x, . . . , x(m−2)) ‖y‖2 (2)
where g ∈ R is a knownpositive constant, and g(x, x, . . . , x(m−2)) ∈R is a known positive function.
Assumption 2. The functions G−1(·) and f (·) are second orderdifferentiable such that G−1, G−1, G−1, f , f , f ∈ L∞ if x(i) (t) ∈L∞, i = 0, 1, . . . ,m+ 1.
Assumption 3. The nonlinear disturbance term and its first twotime derivatives (i.e., h, h, h) are bounded by known constants.
Assumption 4. The unknown nonlinearities G−1(·) and f (·) arelinear in terms of unknown constant system parameters (i.e., LP).
Assumption 5. The desired trajectory xd(t) ∈ Rn is assumed to bedesigned such that x(i)d (t) ∈ L∞, i = 0, 1, . . . ,m+ 2. The desiredtrajectory xd(t) need not be persistently exciting and can be set toa constant value for the regulation problem.
3. Control objective
The objective is to design a continuous composite adaptivecontrollerwhich ensures that the system state x (t) tracks a desiredtime-varying trajectory xd(t) despite uncertainties and boundeddisturbances in the dynamic model. To quantify this objective, atracking error, denoted by e1(t) ∈ Rn, is defined as
e1 , xd − x. (3)
To facilitate a compact presentation of the subsequent controldevelopment and stability analysis, auxiliary error signals denoted

142 P.M. Patre et al. / Automatica 46 (2010) 140–147
by ei (t) ∈ Rn, i = 3, . . . ,m are defined as
e2 , e1 + α1e1, ei , ei−1 + αi−1ei−1 + ei−2 (4)
whereαi ∈ R, i = 1, 2, . . . ,m−1 denote constant positive controlgains. The error signals ei (t) , i = 2, 3, . . . ,m can be expressed interms of e1 (t) and its time derivatives as
ei =i−1∑j=0
bi,je(j)1 , bi,i−1 = 1 (5)
where the constant coefficients bi,j ∈ R can be evaluated bysubstituting (5) in (4), and comparing coefficients. A filteredtracking error (Lewis et al., 1993), denoted by r(t) ∈ Rn, is alsodefined as
r , em + αmem (6)
where αm ∈ R is a positive, constant control gain. The filteredtracking error r (t) is not measurable since the expression in (6)depends on x(m).
4. Control development
To develop the open-loop tracking error system, the filteredtracking error in (6) is premultiplied by G−1 (·), and (5) is used toyield
G−1r = G−1m−1∑j=0
bm,je(j+1)1 + G−1αmem. (7)
By separating the last term from the summation, using the factthat bm,m−1 = 1, and making substitutions from (1) and (3), theexpression in (7) is rewritten as
G−1r = Ydθ + S1 − G−1d h− u. (8)
In (8), the auxiliary function S1(x, x, . . . , x(m−1), t
)∈ Rn is defined
as
S1 , G−1(m−2∑j=0
bm,je(j+1)1 + αmem
)+ G−1x(m)d
−G−1d x(m)d − G
−1f + G−1d fd − G−1h+ G−1d h. (9)
Also in (8), Ydθ ∈ Rn is defined as
Ydθ , G−1d x(m)d − G
−1d fd (10)
where Yd(xd, xd, . . . , x(m)d ) ∈ Rn×p is a desired regression matrix,
and θ ∈ Rp contains the constant unknown system parameters.In (10), the functions G−1d (xd, xd, . . . , x
(m−2)d ) ∈ Rn×n and
fd(xd, xd, . . . , x(m−1)d ) ∈ Rn are defined as
G−1d , G−1(xd, xd, . . . , x(m−2)d )
fd , f (xd, xd, . . . , x(m−1)d ).
(11)
4.1. RISE-based swapping
A measurable form of the prediction error ε (t) ∈ Rn is definedas the difference between the filtered control input uf (t) ∈ Rn andthe estimated filtered control input uf (t) ∈ Rn as
ε , uf − uf (12)
where the filtered control input uf (t) ∈ Rn is generated by Slotineand Li (1991)
uf + ωuf = ωu, uf (0) = 0 (13)
where ω ∈ R is a known positive constant, and uf (t) ∈ Rn issubsequently designed. The differential equation in (13) can bedirectly solved to yield
uf = v ∗ u, v , ωe−ωt (14)where v (t) ∈ R, and ∗ is used to denote the standard convolutionoperation. Using (1), the expression in (14) can be rewritten as
uf = v ∗(G−1x(m) − G−1f − G−1h
). (15)
Since the system dynamics in (1) include non-LP boundeddisturbances h (t), they also get filtered and included in the filteredcontrol input in (15). To compensate for the effects of thesedisturbances, the typical prediction error formulation is modifiedto include a RISE-like structure in the design of the estimatedfiltered control input. With this motivation, the structure of theopen-loop prediction error system is engineered to facilitate theRISE-based design of the estimated filtered control input.Adding and subtracting the term G−1d x
(m)d +G
−1d fd+G
−1d h to the
expression in (15) and using (10) yieldsuf = Ydf θ + v ∗ S − v ∗ Sd + hf (16)
where S(x, x, . . . , x(m)), Sd(xd, xd, . . . , x(m)d ) ∈ Rn are defined as
S , G−1x(m) − G−1f − G−1h (17)
Sd , G−1d x(m)d − G
−1d fd − G
−1d h, (18)
the filtered regressormatrix Ydf (xd, xd, . . . , x(m)d ) ∈ Rn×p is defined
asYdf , v ∗ Yd, (19)and the disturbance hf (t) ∈ Rn is defined as
hf , −v ∗ G−1d h.
The term v ∗ S(x, x, . . . , x(m)) ∈ Rn in (16) depends on x(m). Usingthe following property of convolution (Lewis et al., 1993):g1 ∗ g2 = g1 ∗ g2 + g1 (0) g2 − g1g2 (0) (20)an expression independent of x(m) can be obtained. Considerv ∗ S = v ∗
(G−1x(m) − G−1f − G−1h
)which can be rewritten as
v ∗ S = v ∗(ddt(G−1x(m−1))− G−1x(m−1) − G−1f − G−1h
). (21)
Applying the property in (20) to the first term of (21) yieldsv ∗ S = Sf +W (22)where the state-dependent terms are included in the auxiliaryfunction Sf (x, x, . . . , x(m−1)) ∈ Rn, defined as
Sf , v ∗(G−1x(m−1)
)+ v (0)G−1x(m−1)
− v ∗ G−1x(m−1) − v ∗ G−1f − v ∗ G−1h (23)and the terms that depend on the initial states are included inW (t) ∈ Rn, defined as
W , −vG−1(x (0) , x (0) , . . . , x(m−2) (0)
)x(m−1) (0) . (24)
Similarly, following the procedure in (21)–(24), the expressionv ∗ Sd in (16) is evaluated asv ∗ Sd = Sdf +Wd (25)
where Sdf (xd, xd, . . . , x(m−1)d ) ∈ Rn is defined as
Sdf , v ∗ (G−1d x(m−1)d )+ v (0)G−1d x
(m−1)d
− v ∗ G−1d x(m−1)d − v ∗ G−1d fd − v ∗ G
−1d h (26)
andWd (t) ∈ Rn is defined as
Wd , −vG−1d (xd (0) , xd (0) , . . . , x(m−2)d (0))x(m−1)d (0) . (27)
Substituting (22)–(27) into (16), and then substituting the resultingexpression into (12) yields
ε = Ydf θ + Sf − Sdf +W −Wd + hf − uf . (28)

P.M. Patre et al. / Automatica 46 (2010) 140–147 143
4.2. Composite adaptation
The composite adaptation for the adaptive estimates θ (t) ∈ Rpin (39) is given by
·
θ = Γ Y Td r + Γ YTdf ε (29)
where Γ ∈ Rp×p is a positive definite, symmetric, constant gainmatrix and the filtered regressor matrix Ydf (xd, xd, . . . , x
(m)d ) ∈
Rn×p is defined in (19). The update law in (29) depends onthe unmeasurable signal r (t), but the parameter estimates areindependent of r (t) as can be shown by directly solving (29) asin Zhang, Dawson, de Queiroz, and Dixon (2000).
4.3. Closed-loop prediction error system
Based on (30) and the subsequent analysis, the filtered controlinput estimate is designed as
uf = Ydf θ + µ2 (30)
where µ2 (t) ∈ Rn is a RISE-like term defined as
µ2 (t) ,∫ t
0[k2ε(σ )+ β2sgn(ε(σ ))]dσ (31)
where k2, β2 ∈ R denote constant positive control gains. In atypical prediction error formulation, the estimated filtered controlinput is designed to include just the first term Ydf θ in (30). But aspreviously discussed, the presence of non-LP disturbances in thesystemmodel results in filtered disturbances in the unmeasurableform of the prediction error in (28). Hence, the estimated filteredcontrol input is augmentedwith an additional RISE-like termµ2 (t)to cancel the effects of disturbances in the prediction error and thesubsequent design and stability analysis. Substituting (30) into (28)yields the following closed-loop prediction error system:
ε = Ydf θ + Sf − Sdf +W −Wd + hf − µ2 (32)
where θ (t) ∈ Rp denotes the parameter estimate mismatchdefined as
θ , θ − θ . (33)
To facilitate the subsequent composite adaptive control develop-ment and stability analysis, the time derivative of (32) is expressedas
ε = Ydf θ − YdfΓ Y Tdf ε + N2 + N2B − k2ε − β2sgn(ε) (34)
where (29) is utilized. In (34), the unmeasurable/unknownauxiliary terms N2(e1, e2, . . . , em, r, t),N2B (t) ∈ Rn are definedas
N2 , Sf − Sdf − YdfΓ Y Td r, N2B , W − Wd + hf . (35)
In a similar manner as in Xian et al. (2004), the Mean ValueTheorem can be used to develop the following upper bound for theexpression in (35):∥∥∥N2(t)∥∥∥ ≤ ρ2 (‖z‖) ‖z‖ (36)
where the bounding function ρ2(·) ∈ R is a positive, globallyinvertible, nondecreasing function, and z(t) ∈ Rn(m+1) is definedas
z(t) ,[eT1 e
T2 . . . eTm r
T ]T . (37)
Using Assumption 3, and the fact that v (t) is a linear, strictlyproper, exponentially stable transfer function, the following
inequality can be developed based on the expression in (35) with asimilar approach as in Lemma 2 ofMiddleton andGoodwin (1988):
‖N2B(t)‖ ≤ ξ (38)
where ξ ∈ R is a known positive constant.
4.4. Closed-loop tracking error system
Based on the open-loop error system in (8), the control input iscomposed of an adaptive feedforward term plus the RISE feedbackterm as
u , Ydθ + µ1 (39)
where µ1(t) ∈ Rn denotes the RISE feedback term defined as
µ1 (t) , (k1 + 1)em(t)− (k1 + 1)em(0)
+
∫ t
0{(k1 + 1)αmem(σ )+ β1sgn(em(σ ))}dσ (40)
where k1, β1 ∈ R are positive constant control gains, and αm ∈ Rwas introduced in (6). In (39), θ (t) ∈ Rp denotes a parameterestimate vector for unknown system parameters θ ∈ Rp,generated by a subsequently designed gradient-based compositeadaptive update law (Slotine & Li, 1987, 1989; Tang & Arteaga,1994).The closed-loop tracking error system can be developed by
substituting (39) into (8) as
G−1r = Ydθ + S1 − G−1d h− µ1. (41)
To facilitate the subsequent composite adaptive control develop-ment and stability analysis, the time derivative of (41) is expressedas
G−1 r = −12G−1r + Ydθ − YdΓ Y Tdf ε + N1 + N1B
− (k1 + 1)r − β1sgn(em)− em (42)
where (29) was utilized. In (42), the unmeasurable/unknownauxiliary terms N1(e1, e2, . . . , em, r, t) and N1B (t) ∈ Rn aredefined as
N1 , −12G−1r + S1 + em − YdΓ Y Td r (43)
where (29) was used, and
N1B , −G−1d h− G−1d h. (44)
The structure of (42) and the introduction of the auxiliary terms in(43) and (44) are motivated by the desire to segregate terms thatcan be upper bounded by state-dependent terms and terms thatcan be upper bounded by constants. In a similar fashion as in (36),the following upper bound can be developed for the expression in(43):∥∥∥N1(t)∥∥∥ ≤ ρ1 (‖z‖) ‖z‖ (45)
where the bounding function ρ1(·) ∈ R is a positive, globallyinvertible, nondecreasing function, and z(t) ∈ Rn(m+1)was definedin (37). Using Assumptions 2 and 3, the following inequalitiescan be developed based on the expression in (44) and its timederivative:
‖N1B(t)‖ ≤ ζ1,∥∥N1B(t)∥∥ ≤ ζ2 (46)
where ζi ∈ R, i = 1, 2 are known positive constants.

144 P.M. Patre et al. / Automatica 46 (2010) 140–147
5. Stability analysis
Theorem 1. The controller given in (39) and (40) in conjunctionwith the composite adaptive update law in (29), where the predictionerror is generated from (12), (13), (30) and (31), ensures that allsystem signals are bounded under a closed-loop operation and thatthe position tracking error and the prediction error are regulated inthe sense that
‖e1(t)‖ → 0 and ‖ε(t)‖ → 0 as t →∞
provided the control gains k1 and k2 introduced in (40) and (31) areselected sufficiently large based on the initial conditions of the system(see the subsequent proof), and the following conditions are satisfied:
αm, αm−1 >12, β1 > ζ1 +
1αmζ2, β2 > ξ (47)
where the gains αm−1 and αm were introduced in (4), β1 wasintroduced in (40), β2 was introduced in (31), ζ1 and ζ2 wereintroduced in (46), and ξ was introduced in (38).
Proof. Let D ⊂ Rn(m+2)+p+2 be a domain containing y(t) = 0,where y(t) ∈ Rn(m+2)+p+2 is defined as
y , [ zT εT√P1
√P2 θ T ]
T . (48)
In (48), the auxiliary function P1(t) ∈ R is defined as
P1 (t) , β1n∑i=1
|emi(0)| − em(0)TN1B(0)−∫ t
0L1(τ )dτ (49)
where emi (0) ∈ R denotes the ith element of the vector em (0), andthe auxiliary function L1(t) ∈ R is defined as
L1 , rT (N1B − β1sgn(em)) (50)
where β1 ∈ R is a positive constant chosen accordingto the sufficient condition in (47). Provided the sufficientcondition introduced in (47) is satisfied, the following inequalityis obtained (Xian et al., 2004):∫ t
0L1(τ )dτ ≤ β1
n∑i=1
|emi(0)| − em(0)TN1B(0). (51)
Hence, (51) can be used to conclude that P1(t) ≥ 0. Also in (48),the auxiliary function P2(t) ∈ R is defined as
P2 (t) , −∫ t
0L2(τ )dτ (52)
where the auxiliary function L2(t) ∈ R is defined as
L2 , εT (N2B − β2sgn(ε)) (53)
where β2 ∈ R is a positive constant chosen according to thesufficient condition in (47). Provided the sufficient conditionintroduced in (47) is satisfied, then P2(t) ≥ 0.Let VL(y, t) : D×[0,∞)→ R be a continuously differentiable,
positive definite function defined as
VL(y, t) ,12
m∑i=1
eTi ei +12rTG−1r +
12εTε
+ P1 + P2 +12θ TΓ −1θ (54)
which satisfies the inequalities
U1(y) ≤ VL(y, t) ≤ U2(y) (55)
provided the sufficient conditions introduced in (47) are satis-fied. In (55), the continuous positive definite functions U1(y),U2(y) ∈ R are defined as U1(y) , λ1 ‖y‖2 and U2(y) ,λ2(x, x, . . . , x(m−2)) ‖y‖2, where λ1, λ2(x, x, . . . , x(m−2)) ∈ R aredefined as
λ1 ,12min
{1, g, λmin
{Γ −1
}}(56)
λ2 , max{12g(x, x, . . . , x(m−2)),
12λmax
{Γ −1
}, 1}
where g , g(x, x, . . . , x(m−2)) are introduced in (2), and λmin {·} andλmax {·} denote the minimum and maximum eigenvalue of thearguments, respectively.
Remark 1. From (34), (42), (49), (50), (52) and (53), some of thedifferential equations describing the closed-loop system for whichthe stability analysis is being performed have discontinuous right-hand sides as
G−1 r = −12G−1r + Ydθ − YdΓ Y Tdf ε + N1 + N1B
− (k1 + 1)r − β1sgn(em)− em (57)
ε = Ydf θ − YdfΓ Y Tdf ε + N2 + N2B − k2ε−β2sgn(ε) (58)
P1 = −L1 = −rT (N1B − β1sgn(em)) (59)
P2 = −L2 = −εT (N2B − β2sgn(ε)). (60)
Let f (y, t) ∈ Rn(m+2)+p+2 denote the right-hand side of (57)–(60).Since the subsequent analysis requires that a solution exists fory = f (y, t), it is important to show the existence and uniquenessof the solution to (57), (59) and (60). As described in Polycarpouand Ioannou (1993) and Qu (1998), the existence of Filippov’sgeneralized solution can be established for (57)–(60). First, notethat f (y, t) is continuous except in the set {(y, t) |em = 0}. LetF (y, t) be a compact, convex, upper semicontinuous set-valuedmap that embeds the differential equation y = f (y, t) into thedifferential inclusions y ∈ F (y, t). FromTheorem2.7 ofQu (1998),an absolute continuous solution exists to y ∈ F (y, t) that is ageneralized solution to y = f (y, t). A common choice for F (y, t)that satisfies the above conditions is the closed convex hull off (y, t) (Polycarpou & Ioannou, 1993; Qu, 1998). A proof that thischoice for F (y, t) is upper semicontinuous is given in Gutman(1979).Moreover, note that the differential equationdescribing theoriginal closed-loop system (i.e., after substituting (39) into (1))has a continuous right-hand side; thus, satisfying the condition forexistence of classical solutions.
After using (4), (6), (29), (34), (42), (49), (50), (52) and (53), thetime derivative of (54) can be expressed as
VL(y, t) = −m∑i=1
αieTi ei + eTm−1em − r
T r − k1rT r
+ rT Ydθ + rT N1 + rTN1B − rTYdΓ Y Tdf ε
−β1rT sgn(em)+ εT Ydf θ + εT N2 + εTN2B−k2εTε − εTYdfΓ Y Tdf ε − β2ε
T sgn(ε)
− rT (N1B − β1sgn(em))− εTN2B
+ εTβ2sgn(ε)− θ TΓ −1(Γ Y Td r + Γ YTdf ε). (61)
After canceling similar terms, using the fact that aTb ≤ 12 (‖a‖
2+
‖b‖2) for some a, b ∈ Rn, and using the following upper bounds∥∥YdΓ Y Tdf ∥∥ ≤ c1, ∥∥YdfΓ Y Tdf ∥∥ ≤ c2

P.M. Patre et al. / Automatica 46 (2010) 140–147 145
where c1, c2 ∈ R are positive constants, VL(y, t) is upper boundedusing the squares of the components of z(t) as
VL(y, t) ≤ −λ3 ‖z‖2 − k1 ‖r‖2 + ‖r‖∥∥∥N1∥∥∥+ c1 ‖ε‖ ‖r‖
+ ‖ε‖
∥∥∥N2∥∥∥− (k2 − c2) ‖ε‖2 , (62)
where
λ3 , min{α1, α2, . . . , αm−2, αm−1 −
12, αm −
12, 1}.
Letting k2 = k2a + k2b where k2a, k2b ∈ R are positive constants,using the inequalities in (36) and (45), and completing the squares,the expression in (62) is upper bounded as
VL(y, t) ≤ −λ3 ‖z‖2 +ρ2(‖z‖) ‖z‖2
4k− k2b ‖ε‖2 (63)
where k ∈ R is defined as
k ,k1 (k2a − c2)
max {k1, (k2a − c2)}, k2a > c2 (64)
and ρ(·) ∈ R is a positive, globally invertible, nondecreasingfunction defined as
ρ2(‖z‖) , ρ21 (‖z‖)+ (ρ2(‖z‖)+ c1)2 .
The expression in (63) can be further upper bounded by acontinuous, positive semi-definite function
VL(y, t) ≤ −U(y) = c∥∥∥[zT εT ]T∥∥∥2 ∀y ⊂ D (65)
for some positive constant c , where
D ,{y (t) ∈ Rn(m+2)+p+2 | ‖y‖ ≤ ρ−1
(2√λ3k
)}.
Larger values of k will expand the size of the domain D . Theinequalities in (55) and (63) can be used to show that VL(y, t) ∈L∞ inD; hence, ei(t) ∈ L∞ and ε (t) , r(t), θ (t) ∈ L∞ inD . Theclosed-loop error systems can now be used to conclude that all theremaining signals are bounded in D , and the definitions for U(y)and z(t) can be used to prove that U(y) is uniformly continuous inD . Let S ⊂ D denote a set defined as
S ,
{y(t) ∈ D | U2(y(t)) < λ1
(ρ−1
(2√λ3k
))2}. (66)
The region of attraction in (66) can be made arbitrarily large toinclude any initial conditions by increasing the control gain k (i.e., asemi-global stability result). Theorem 8.4 of Khalil (2002) can nowbe invoked to state that
c∥∥∥[zT εT ]T∥∥∥2 → 0 as t →∞ ∀y(0) ∈ S. (67)
Based on the definition of z(t), (67) can be used to show that
‖e1(t)‖ , ‖ε(t)‖ → 0 as t →∞ ∀y(0) ∈ S. � (68)
6. Experiment
A testbed was used to implement the developed controller. Thetestbed consists of a circular disc of unknown inertiamounted on adirect-drive switched reluctance motor. A rectangular nylon blockwas mounted on a pneumatic linear thruster to apply an externalfriction load to the rotating disk. A pneumatic regulatormaintaineda constant pressure of 20 psi on the circular disk. The dynamics forthe testbed are given as follows:
J q+ f (q)+ τd(t) = τ(t) (69)
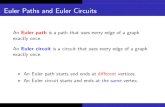
Fig. 1. Tracking error for the proposed composite adaptive control law (RISE + CFF).
Fig. 2. Control torque for the proposed composite adaptive control law (RISE + CFF).
where J ∈ R denotes the combined inertia of the circular disk androtor assembly, f (q) ∈ R is the nonlinear friction, and τd (t) ∈ Rdenotes a general nonlinear disturbance (e.g., unmodeled effects).The nonlinear friction term f (q) is assumed to be modeled as acontinuously differentiable function as described in Makkar, Hu,Sawyer, and Dixon (2007), Patre et al. (2008). The desired linktrajectory is selected as follows (in degrees):
qd(t) = 60.0 sin(1.2t)(1− exp(−0.01t3)). (70)
Three different experiments were conducted to demonstratethe efficacy of the proposed controller. For each controller, thegains were not retuned (i.e., the common control gains remainthe same for all controllers). First, no adaptation was used andthe controller with only the RISE feedback was implemented. Forthe second experiment, the prediction error component of theupdate law in (29) was removed, resulting in a standard gradient-based update law (hereinafter denoted as RISE + FF). For thethird experiment, the proposed composite adaptive controller in(39)–(40) (hereinafter denoted as RISE + CFF) was implemented.The tracking error is shown in Fig. 1. The control torque is shownin Fig. 2 and the adaptive estimates are depicted in Fig. 3. Eachexperiment was performed five times and the average RMS errorand torque values were calculated. The average RMS tracking error(in deg) for the RISE controller is 0.219, compared to 0.138 and0.102 for the RISE + FF and RISE + CFF (proposed), respectively.The average RMS torques (in Nm) for the respective controllers is31.75, 32.99, and 32.49,which indicate that the proposedRISE+CFFcontroller yields the lowest RMS errorwith a similar control effort.

146 P.M. Patre et al. / Automatica 46 (2010) 140–147
Fig. 3. Adaptive estimates for the proposed composite adaptive control law (RISE+ CFF).
7. Conclusion
A model-based feedforward adaptive component was used inconjunction with the RISE feedback, where the adaptive estimateswere generated using a composite update law driven by both thetracking and prediction error with the motivation of using moreinformation in the adaptive update law. To account for the effectsof non-LP disturbances, the typical prediction error formulationwas modified to include a second RISE-like term in the estimatedfiltered control input design. Using a Lyapunov stability analysis,sufficient gain conditions were derived under which the proposedcontroller yields semi-global asymptotic stability. Experiments ona rotating disk with externally applied friction indicate that theproposedmethod yields better tracking performancewith a similarcontrol effort when compared to a typical RISE controller and aRISE controller with a typical gradient-based feedforward term.The asymptotic stability for the proposed RISE-based composite
adaptive controller comes at the expense of achieving semi-global stability which requires the initial condition to be withina specified region of attraction that can be made larger byincreasing certain gains as subsequently discussed in Section 5.Development is also provided that proves the prediction erroris square integrable; yet, no conclusion can be drawn about theconvergence of the parameter estimation error due to the presenceof filtered additive disturbances in the prediction error. The currentdevelopment, as well as all previous RISE controllers, require full-state feedback. The development of an output feedback resultremains an open problem. The proposed method uses a gradient-based composite adaptive lawwith a fixed adaptation gain. Futureefforts could also focus on designing a composite law with least-squares estimation with time-varying adaptation gain for theconsidered class of systems.
References
Abiko, S., & Hirzinger, G. (2007). An adaptive control for a free-floating space robotby using inverted chain approach. In Proc. IEEE/RSJ int. conf. on intelligent robotsand systems (pp. 2236–2241).
Bartolini, G., Ferrara, A., & Stotsky, A. A. (1999). Robustness and performance ofan indirect adaptive control scheme in presence of bounded disturbances. IEEETransactions on Automatic Control, 44(4), 789–793.
Cai, Z., de Queiroz, M. S., & Dawson, D. M. (2006). Robust adaptive asymptotictracking of nonlinear systems with additive disturbance. IEEE Transactions onAutomatic Control, 51, 524–529.
Christoforou, E. (2007). On-line parameter identification and adaptive control ofrigid robots using base reaction forces/torques. In Proc. IEEE int. conf. on roboticsand autom. (pp. 4956–4961).
de Queiroz, M. S., Dawson, D. M., & Agarwal, M. (1999). Adaptive control ofrobot manipulators with controller/update law modularity. Automatica, 35,1379–1390.
Gutman, S. (1979). Uncertain dynamical systems–a Lyapunov min-max approach.IEEE Transactions on Automatic Control, 24(3), 437–443.
Khalil, H. K. (2002). Nonlinear systems (3rd ed.). New Jersey: Prentice-Hall, Inc..Krstic, M., Kanellakopoulos, I., & Kokotovic, P. (1995). Nonlinear and adaptive controldesign. New York: Wiley.
Krstic, M., & Kokotovic, P. V. (1995). Adaptive nonlinear design with controller-identifier separation and swapping. IEEE Transaction on Automatic Control, 40(3),426–440.
Lewis, F. L., Abdallah, C., & Dawson, D. (1993). Control of robot manipulators. NewYork: MacMillan Publishing Co.
Makkar, C., Hu, G., Sawyer, W. G., & Dixon, W. E. (2007). Lyapunov-based trackingcontrol in the presence of uncertain nonlinear parameterizable friction. IEEETransactions on Automatic Control, 52(10), 1988–1994.
Middleton, R. H., & Goodwin, C. G. (1988). Adaptive computed torque control forrigid link manipulators. System and Control Letters, 10, 9–16.
Morse, A. (1980). Global stability of parameter-adaptive control systems. IEEETransactions on Automatic Control, 25(3), 433–439.
Mrad, F., & Majdalani, A. (2003). Composite adaptive control of astable UUVs. IEEEJournal of Oceanic Engineering , 28(2), 303–307.
Patre, P. M., MacKunis, W., Kaiser, K., & Dixon, W. E. (2008). Asymptotic tracking foruncertain dynamic systems via a multilayer neural network feedforward andRISE feedback control structure. IEEE Transactions on Automatic Control, 53(9),2180–2185.
Patre, P. M., MacKunis, W., Makkar, C., & Dixon, W. E. (2008). Asymptotic trackingfor systems with structured and unstructured uncertainties. IEEE Transactionson Control Systems Technology, 16(2), 373–379.
Polycarpou, M. M., & Ioannou, P. A. (1993). On the existence and uniqueness ofsolutions in adaptive control systems. IEEE Transactions on Automatic Control,38(3), 474–479.
Pomet, J.-B., & Praly, L. (1988). Indirect adaptive nonlinear control. In Proc. IEEE conf.on decision and control, December (pp. 2414–2415).
Qu, Z. (1998). Robust Control of Nonlinear Uncertain Systems. New-York: Wiley Inc..Qu, Z., & Xu, J. (2002). Model-based learning controls and their comparisons usingLyapunov direct method. Asian Journal of Control, 4(1), 99–110.
Reed, J., & Ioannou, P. (1989). Instability analysis and robust adaptive controlof robotic manipulators. IEEE Transactions on Robotics and Automation, 5(3),381–386.
Sastry, S., & Isidori, A. (1989). Adaptive control of linearizable systems. IEEETransactions on Automatic Control, 34(11), 1123–1131.
Slotine, J. J., & Li, W. (1991). Applied Nonlinear Control. Upper Saddle River: Prentice-Hall.
Slotine, J.-J., & Li, W. (1987). Adaptive robot control: A new perspective. In Proc. IEEEconf. on decision and control, December (pp. 192–198).
Slotine, J. J., & Li, W. (1989). Composite adaptive control of robot manipulators.Automatica, 25(4), 509–519.
Tang, Y., & Arteaga, M. A. (1994). Adaptive control of robot manipulators based onpassivity. IEEE Transactions on Automatic Control, 39(9), 1871–1875.
Volyanskyy, K. Y., Calise, A. J., & Yang, B.-J. (2006). A novel Q-modification term foradaptive control. In Proc. Amer. control conf. (pp. 4072–4076).
Volyanskyy, K. Y., Haddad, W. M., & Calise, A. J. (2008). A new neuroadaptivecontrol architecture for nonlinear uncertain dynamical systems: Beyond σ -and e-modifications. In Proc. IEEE conf. on decision and control, 9–11 December(pp. 80–85).
Wang, W.-J., & Chen, J.-Y. (2001). Composite adaptive position control of inductionmotor based on passivity theory approach. IEEE Power Engineering Review, 21(6),69–69.
Xian, B., Dawson, D.M., de Queiroz, M. S., & Chen, J. (2004). A continuous asymptotictracking control strategy for uncertain nonlinear systems. IEEE Transactions onAutomatic Control, 49(7), 1206–1211.
Zhang, F., Dawson, D. M., de Queiroz, M. S., & Dixon, W. E. (2000). Global adaptiveoutput feedback tracking control of robot manipulators. IEEE Transactions onAutomatic Control, 45(6), 1203–1208.
Zergeroglu, E., Dixon, W., Haste, D., & Dawson, D. (1999). A composite adaptiveoutput feedback tracking controller for robotic manipulators. In Proc. Amer.control conf. (pp. 3013–3017).
Wang,W.-J., & Chen, J.-Y. (2001). Compositive adaptive position control of inductionmotors based on passivity theory. IEEE Transactions on Energy Conversion, 16(2),180–185.
Parag M. Patre was born in Nagpur, India. He receivedthe B. Tech. degree in mechanical engineering from theIndian Institute of Technology Madras, India, in 2004.Following this he was with Larsen & Toubro Limited,India until 2005, when he joined the graduate schoolat the University of Florida. He received the M.S. andPh.D. degrees in mechanical engineering in 2007 and2009, respectively, and is currently a NASA postdoctoralfellow at the NASA Langley Research Center, Hampton, VA.His areas of research interest are Lyapunov-based designand analysis of control methods for uncertain nonlinear
systems, robust and adaptive control, control of robots, and neural networks. Hehas published 18 refereed journal and conference papers and the monograph RISE-Based Robust and Adaptive Control of Nonlinear Systems.

P.M. Patre et al. / Automatica 46 (2010) 140–147 147
Will MacKunis received his Ph.D. degree in 2009 fromthe Department of Mechanical and Aerospace Engineeringat the University of Florida (UF) as a UF Alumni Fellow.After completing his doctoral studies, he was selected asa National Research Council (NRC) Postdoctoral ResearchAssociate at the Air Force Research Laboratory MunitionsDirectorate at Eglin Air Force Base, where he worksin the Guidance and Navigation Division. Dr. MacKunis’main research interest has been the development andapplication of Lyapunov-based control techniques fornonlinear mechanical systems with ill-defined dynamic
models. He is the co-author of 26 refereed journal and conference papers and themonograph RISE-Based Robust and Adaptive Control of Nonlinear Systems, and hisresearch has been recognized by NASA and the NRC.
Marcus Johnson received hisM.S. degree in 2008 from theDepartment of Mechanical and Aerospace Engineering atthe University of Florida. He is currently working on hisPh.D. at the University of Florida and his main researchinterest is the development of Lyapunov-based proofs foroptimality of nonlinear adaptive systems.
Warren E. Dixon received his Ph.D. degree in 2000 fromthe Department of Electrical and Computer Engineeringfrom Clemson University. After completing his doctoralstudies he was selected as an Eugene P. Wigner Fellow atOak Ridge National Laboratory (ORNL) where he workedin the Robotics and Energetic Systems Group. In 2004, Dr.Dixon joined the faculty of the University of Florida inthe Mechanical and Aerospace Engineering Department.His main research interest is the development andapplication of Lyapunov-based control techniques foruncertain nonlinear systems. He is the coauthor of
four monographs, an edited collection, six chapters, and over 180 refereedjournal and conference papers. His work has been recognized by the 2009American Automatic Control Council (AACC) O. Hugo Schuck Award, 2006 IEEERobotics and Automation Society (RAS) Early Academic Career Award, an NSFCAREER Award (2006–2011), 2004 DOE Outstanding Mentor Award, and the2001 ORNL Early Career Award for Engineering Achievement. Dr. Dixon is asenior member of IEEE. He serves on the IEEE CSS Technical Committee onIntelligent Control, ASME DSC Division Mechatronics and Robotics TechnicalCommittees, is a member of numerous conference program and organizingcommittees, and serves on the conference editorial board for the IEEE CSSand RAS and the ASME DSC. He served as an appointed member to theIEEE CSS Board of Governors for 2008. He is currently an associate editorfor Automatica, IEEE Transactions on Systems Man and Cybernetics: Part BCybernetics, International Journal of Robust and Nonlinear Control, and Journal ofRobotics.