Common Diesel Generator Protection of power systems in DP ...
97
Common Diesel Generator Protection of power systems in DP classified vessels. By Shuang Li in partial fulfilment of the requirements for the degree of Master of Science in Electrical Sustainable Energy at the Delft University of Technology, to be defended publicly on Thursday July 14, 2016 at 9:00 AM. Supervisor: Dr.ir. Marjan Popov TU Delft Mr. Remmert Dekker Bakker Sliedrecht Thesis committee: Prof.dr. Peter Palensky TU Delft Dr.ir. Marjan Popov TU Delft Dr. Armando Rodrigo Mor TU Delft Mr. Remmert Dekker Bakker Sliedrecht
Transcript of Common Diesel Generator Protection of power systems in DP ...

Common Diesel Generator
Protection of power systems in DP
classified vessels.
By
Shuang Li
in partial fulfilment of the requirements for the degree of
Master of Science
in Electrical Sustainable Energy
at the Delft University of Technology,
to be defended publicly on Thursday July 14, 2016 at 9:00 AM.
Supervisor: Dr.ir. Marjan Popov TU Delft
Mr. Remmert Dekker Bakker Sliedrecht
Thesis committee: Prof.dr. Peter Palensky TU Delft
Dr.ir. Marjan Popov TU Delft
Dr. Armando Rodrigo Mor TU Delft
Mr. Remmert Dekker Bakker Sliedrecht

Abstract
For commercial and environmental reasons, DP vessel owners intend to operate with a
reduced number of diesel generator sets, which often operate at very low power levels, to
minimize the costs of fuel and maintenance.
The solution for these phenomena is that vessel’s power systems are operated under one
or more coupled bus-bars (closed Bus-Ties mode).
The classification societies are now providing special rules which make it possible for
suppliers of electrical systems to follow the above mentioned trend.
The consequence, however, for the suppliers of electrical systems is that the electrical
systems require much more complex and expensive control and protection systems than
before to obtain the same proven levels of safety and reliability of power systems with
separated bus-bars. (open Bus-Ties).
The protection circuits currently used are based on functional requirements of the
classification societies, where insufficient account has been taken of errors caused by the
diesel engine governor and generator AVR faults in closed bus tie mode. They occupy
15%~20% of all faults, according to the International Marine Contractors Association [1]. And
they are easy to cause a blackout in the vessel. For example, when 2 paralleled generators
are running online under low loading condition. Then a diesel engine is over fueling. The faulty
generator takes more load and the healthy generator takes less load. The healthy generator
takes reverse power, and will be tripped by protection. After tripping the healthy generator, the
faulty generator will be over frequency. At last, the faulty generator will trip, and a blackout
occurs.
The purpose of this "Common Diesel Generator Protection" is to detect the early stage
failures of diesel engine and generator in a power plant to avoid power interruption caused by
a so-called snowball effect (resulting in a blackout).
The other purpose of this master thesis is building a generator model with full excitation
system and diesel engine. Then, with the help of the test measurement from manufacturer and
vessel, tune parameters in diesel generator model and validate it. The validated diesel
generator model can be used for the further research in the company.

Preface
This report is the result of my master thesis as a master student in Electrical Sustainable
Energy master program. The work of the thesis is done at Bakker Sliedrecht, a marine power
system integrator, from November 2015 to July 2016. Many thanks are expressed to the
persons who helped and encouraged me during my thesis.
Firstly, I would like to thank Prof. Marjan Popov, who is my supervisor at the TU Delft, for his
guidance and many excellent suggestions to my thesis. Thank you for your patience and
encouragement.
Next, I would like to thank Remmert Dekker, who is the R&D manager at Bakker Sliedrecht
and also is my daily supervisor in the company. Thank you for giving me the opportunity to
have this thesis. Thanks for your encouragement when I met difficulties. Thanks for helping me
to arrange all affairs, which are related to my thesis, in the company.
At last, I want to thank the PHD candidate Lian Liu and Master student Meng Zhang for the
fruitful discussion about power system modeling.
Shuang Li
Sliedrecht, June 2016

Abbreviations
AGP Advanced Generator Protection
AVR Automatic Voltage Regulator
CDG Common Diesel Generator protection system
DGMS Diesel Generator & Monitoring System
DG Diesel Generator
DP Dynamic Positioning
IEC International Electro technical Commission
IEEE Institute of Electrical and Electronics Engineers
IMCA International Marine Contractor Association
OEL Over Excitation Limiter
PF Power Factor
PID controller Proportional Integral Derivative controller
PLC Programmable Logic Controller
UEL Under Excitation Limiter

Content
1. INTRODUCTION ................................................................................................ 1
1.1 Background ......................................................................................................... 1
1.2 Problem statement .............................................................................................. 2
1.3 Organization of the thesis ................................................................................... 3
1.4 Previous work ..................................................................................................... 4
2. MODELING OF MARINE POWER SYSTEM ..................................................... 6
2.1 Single diesel generator model ............................................................................ 6
2.1.1 Generator model ................................................................................................. 6
2.1.2 AVR and exciter ................................................................................................ 10
2.2 Diesel engine model ......................................................................................... 11
2.2.1 Engine model .................................................................................................... 12
2.2.2 Governor ........................................................................................................... 13
2.2.3 Emission control................................................................................................ 14
2.3 Consumer load.................................................................................................. 14
2.3.1 Constant impedance load ................................................................................. 14
2.3.2 Constant power load ......................................................................................... 15
2.4 Validation .......................................................................................................... 16
3. THREE PARALLEL DIESEL GENERATORS MODEL .................................... 20
3.1 Active and reactive power droop ...................................................................... 21
3.2 Load step test ................................................................................................... 22
3.3 Excitation system and prime mover faults simulation results ........................... 23
3.3.1 Excitation system faults simulation results ....................................................... 23
3.3.2 Prime mover faults simulation results ............................................................... 27
4. COMMON DIESEL GENERATOR PROTECTION DESIGN ............................ 29
4.2 Excitation system detection .............................................................................. 29
4.2.1 Mechanism ........................................................................................................ 29
4.2.2 Expected value calculation ............................................................................... 31
4.3 Prime mover detection ...................................................................................... 35
4.3.1 Mechanism ........................................................................................................ 35
4.3.2 Expected value calculation ............................................................................... 37
4.4 Voting system ................................................................................................... 37
4.5 Operation window ............................................................................................. 38
4.6 Deviation detection simulation results .............................................................. 39
4.7 CDG structure in simulation .............................................................................. 42
5. CDG VALIDATION ........................................................................................... 45
5.1 Test setup ......................................................................................................... 45
5.2 Test setup generator validation ........................................................................ 51
5.3 CDG test result ................................................................................................. 57
6. FUTURE WORK AND CONCLUSION ............................................................. 69

6.1 Future work ....................................................................................................... 69
6.2 Conclusion ........................................................................................................ 69
7. BIBLIOGRAPHY ............................................................................................... 71
APPENDIX A ........................................................................................................................... 73
APPENDIX B ........................................................................................................................... 74
APPENDIX C ........................................................................................................................... 82
APPENDIX D ........................................................................................................................... 90
APPENDIX E ........................................................................................................................... 91

1
1. Introduction
1.1 Background
The concept of marine electric power system was implemented around 100 years ago. And
it was not used commonly at that time. With the possibility to control an electrical motor with a
variable speed in a large power range with compact, reliable and cost-competitive solutions,
the marine electric power system became popular during 90’s.
With the development of azimuth thrusters, propulsion can force a vessel to move in all
directions. And with the number of the offshore application increasing, dynamic positioning
(DP) is proposed [2]. A dynamically positioned vessel means a unit or a vessel which
automatically maintains its position (fixed location or predetermined track) by means of
thruster force. Figure 1.1 shows a typical DP vessel.
Furthermore, around 10 years ago, in order to accomplish DP Class requirement (during DP
operation, the vessel can tolerate a single fault), open bus-tie configuration was used for the
power system. The open bus-tie configuration was to isolate generators in their own sections.
A single fault in the system only can influence the sub section, and cannot lead the vessel to
lose its DP operation [3].
Nowadays, because of the costs of the fuel and environment protection, vessel owners
would like to decrease the fuel consumption of their fleet. However, in an open bus-tie mode,
every generator is used to keep DP operation, which has a high fuel consumption and a high
noxious exhaust gas. That’s the reason why vessel owners would like to use closed bus-tie
mode, which does not require every generator to run and has lower fuel consumption than
open bus-tie mode [4]. Closed bus-tie mode becomes popular. And the new DNV GL DP class
DYNPOSER also opens up for DP2 and DP3 operation with closed bus-tie mode. Therefore,
the marine power system industry begins to modify the old system and investigate new system
to accomplish new DP Class requirements.

2
Figure 1.1 A DP pipe laying vessel from Subsea 7
1.2 Problem statement
As stated in the background, the closed bus-tie mode becomes recommended. However,
the fault and protection parameter settings become more complex in the closed bus-tie mode
than the open bus-tie mode, because each generator will affect each other and the system
becomes weak. Therefore, in order to have more researches and understanding on the closed
bus-tie mode, the company wants to have its own validated diesel generator model and
parallel generator sets model. The diesel generator model should include a brushless
generator, standard AVR and a diesel engine.
Moreover, the protection systems currently used are based on the functional requirements of
the classification societies, where insufficient account has been taken of errors caused by the
diesel engine governor and generator AVR faults in closed bus-tie mode. According to the
International Marine Contractor Association (IMCA), they occupy 15%~20% of all faults. And
they are easy to cause a blackout in the vessel. For example, when three paralleled
generators are running online under low load condition, a generator (Gen1) is over excited
after 20s. The situation of the example is shown in Figure 1.2.

3
Figure 1.2 Over excitation occurs on Gen1
The faulty generator (Gen1) takes more reactive power and the healthy generators (Gen2
and Gen3) take less reactive power. Then the healthy generators take reverse reactive power,
and will be tripped by the protection. After tripping the healthy generators, only the faulty
generator is online and the system voltage is only controlled by the faulty generator. At last, the
faulty generator will trip, due to overvoltage. The blackout occurs, and the vessel loses its DP
operation. The blackout also can result from prime mover faults. Therefore, in order to keep
pace with new DNV DP class standard, a system should be investigated to the protect system
from excitation system faults and prime mover faults. The company named it as CDG.
1.3 Organization of the thesis
The main contributions of the thesis are summarized here.
The single diesel generator model is described in Chapter 2. It describes each component
included in the model and gives all equations and block diagrams related to the model. The
model is built in Matlab Simulink. Validation of the generator model is done and the
comparisons between the test measurement and the model result are given.
In Chapter 3, the three parallel diesel generator sets model is built. In order to realize active
and reactive power load sharing, compensated active power droop and fixed reactive power
droop are used in the model. Different scenarios are simulated, which are a load step test, 7
kinds of excitation system faults and 5 kinds of prime mover faults.

4
In Chapter 4, a system named CDG, which can protect diesel generator sets from excitation
and prime mover faults, is proposed. The mechanism and functions of CDG are described.
The logical structure of CDG is given and transferred into the simulation model. At last, CDG is
tested under the different scenarios.
Chapter 5 shows that, in order to allow this system model to be commercially used later on,
a three parallel diesel generator sets test setup will be built to test CDG. The CDG model is
translated to PLC program. At last, CDG test result will be shown.
1.4 Previous work
For the modeling part, some researches have been done, which are focus on modeling of
marine diesel electrical power system. Hansen provided a model of a marine power system [5],
but diesel engine model is a one order model. And the saturation is not included in its
generator model. Pedersen uses Bond Graph to build a marine power system model [6]. But
Bond Graph language is not a recommended language by the classification society. The
marine power system model provided by Radan [7] has the same weakness as Hansen’s.
Regarding excitation and prime mover protection systems, some systems are proposed,
which are voting system [8], Advanced Generator Protection (AGP) [9] and ABB Diesel
Generator Monitoring System (DGMS) [10].
The voting system is to compare information collected from all online diesel generator sets.
If the information of one diesel generator set is not similar as the other diesel generator sets, it
is recognized as a faulty generator set. However, the voting system cannot be used when
there are only two diesel generator sets online and cannot find out a common fault on 2 or
more than 2 diesel generator sets.
Advanced Generator Protection (AGP) introduced by Cargill is used for the marine power
system with droop load sharing. If the active power and reactive power droops are known.
AGP uses a window around droop line to detect the conditions of the diesel generator sets. If a
diesel generator set goes out of this window, AGP will define it as a faulty generator. However,
this system may give the wrong response during normal operation. For example, a load step
can push the diesel generator set out of the windows of active power and reactive power droop.
And it can’t detect a small fault, which can keep all the generator inside the window. For a
heavy fault, healthy generators will also go out of the window to get a trip.
ABB designed DGMS (Diesel Generator & Monitoring System) to handle such faults by
using various types of algorithms as voting between three or more generators or looking at the
expected correlation between certain parameters that should follow each other in normal
situations, but not necessarily in faulty situations. The configuration of it is shown in Figure 1.3.

5
Figure 1.3 The configuration of DGMS

6
2. Modeling of marine power
system
This chapter is mainly focused on modeling a marine power system in Matlab Simulink. The
aim of modeling is to let the company have its own validated marine power system and the
company can use it for later research and project parameter setting. Furthermore, this model
should be improved to qualify the requirement of marine classification about marine power
system modeling. Therefore, the accuracy of the model should be high while the model
simulation speed is acceptable.
2.1 Single diesel generator model
The single diesel generator model consists of a brushless synchronous generator driven by
a diesel engine with controls. After building all components, the parameters of the model can
be calculated from the diesel engine and generator datasheets as well as the test
measurement. The model validation should be done as the requirements of the company. The
single diesel generator model is prepared for the three parallel diesel generators model.
2.1.1 Generator model
In the marine power systems, the brushless synchronous generator is mostly in use. Its
configuration is shown in Figure 2.
Figure 2.1 Configuration of brushless generator

7
The brushless generator consists of an exciter and a main generator. This section only
states the modeling of the main generator. The exciter will be described in Section 2.1.2.
The synchronous generator is a rotating machine. The relationship between torque and
rotating speed can be expressed by Newton’s second law for rotation, which is given by
Equation 2.1.
𝐽𝑔𝑑𝜔𝑟
𝑑𝑡= 𝑇𝑚𝑒𝑐ℎ − 𝑇𝑒𝑙𝑒𝑐 (2.1)
𝐽𝑔 is the moment of inertia of the generator.
𝜔𝑟 is the generator angular velocity.
𝑇𝑚𝑒𝑐ℎ is the mechanical torque from the diesel engine.
𝑇𝑒𝑙𝑒𝑐 is the electrical torque from the generator
The well known two-axis dq0-model is always used for modeling a synchronous generator.
In the two–axis dq0-model, 7 orders differential equations stating stator, rotor and damper
windings dynamics are included [11]. Saturation also is taken into account for this generator
model. Hysteresis and eddy current losses are represented by a speed dependent loss.
The transformations from abc to dq0 coordinates are shown in Equation 2.2, 2.3 and 2.4.
[
𝑒𝑑
𝑒𝑞
𝑒0
] = 𝑃𝑠 [
𝑣𝑎
𝑣𝑏
𝑣𝑐
] (2.2)
[
𝑖𝑑𝑖𝑞𝑖0
] = 𝑃𝑠 [
𝑖𝑎𝑖𝑏𝑖𝑐
] (2.3)
𝑃𝑠 =2
3
[ cos θ𝑒 cos( θ𝑒 −
2𝜋
3) cos(θ𝑒 +
2𝜋
3)
− sin θ𝑒 −sin(θ𝑒 −2𝜋
3) − sin(θ𝑒 +
2𝜋
3)
1
2
1
2
1
2 ]
(2.4)
𝑣𝑎, 𝑣𝑏, 𝑣𝑐 are the generator’s terminal voltage of phase a, b and c.
𝑖𝑎, 𝑖𝑏, 𝑖𝑐 are the generator stator current.
𝑒𝑑 is d axis stator voltage.
𝑒𝑞 is q axis stator voltage.
𝑒0 is 0 sequence stator voltage.
𝑖𝑑 is d axis stator current.
𝑖𝑞 is q axis stator current .
𝑖0 is 0 sequence stator voltage.
θ𝑒 is the angle between phase a and d axis.

8
According to the 7 orders generator model, the flux equations are shown in Equation 2.5,
2.6, 2.7, 2.8 and 2.9. The coupling inductance between damper winding and main field winding
is neglected.
𝜓𝑑 = −(𝐿𝑎𝑑 + 𝐿𝑙)𝑖𝑑 + 𝐿𝑎𝑑𝑖𝑓𝑑 + 𝐿𝑎𝑑𝑖1𝑑 (2.5)
𝜓𝑞 = −(𝐿𝑎𝑞 + 𝐿𝑙)𝑖𝑞 + 𝐿𝑎𝑞𝑖1𝑞 (2.6)
𝜓𝑓𝑑 = 𝐿𝑓𝑑𝑖𝑓𝑑 + 𝐿𝑎𝑑𝑖1𝑑 − 𝐿𝑎𝑑𝑖𝑑 (2.7)
𝜓1𝑑 = 𝐿𝑎𝑑𝑖𝑓𝑑 + 𝐿1𝑑𝑖1𝑑 − 𝐿𝑎𝑑𝑖𝑑 (2.8)
𝜓1𝑞 = 𝐿1𝑞𝑖1𝑞 − 𝐿𝑎𝑞𝑖𝑞 (2.9)
𝑖𝑓𝑑 is the rotor circuit current.
𝐿𝑓𝑑 is the self-inductance of rotor circuit.
𝐿1𝑑 is the self-inductance of d-axis damper winding.
𝐿1𝑞 is the self-inductance of q-axis damper winding.
𝜓𝑑 is the d-axis stator flux linkage.
𝜓𝑞 is the q-axis stator flux linkage.
𝜓𝑓𝑑 is the rotor circuit flux linkage.
𝜓1𝑑 is the d-axis damper winding flux linkage.
𝜓1𝑞 is the q-axis damper winding flux linkage.
The voltage equations are shown in Equation 2.10, 2.11, 2.12, 2.13 and 2.14
𝑒𝑑 =1
𝜔𝑏𝑎𝑠𝑒
𝑑𝜓𝑑
𝑑𝑡− 𝜓𝑞𝜔𝑟 − 𝑅𝑎𝑖𝑑 (2.10)
𝑒𝑞 =1
𝜔𝑏𝑎𝑠𝑒
𝑑𝜓𝑞
𝑑𝑡+ 𝜓𝑑𝜔𝑟 − 𝑅𝑎𝑖𝑞 (2.11)
𝑒𝑓𝑑 =1
𝜔𝑏𝑎𝑠𝑒
𝑑𝜓𝑓𝑑
𝑑𝑡+ 𝑅𝑓𝑑𝑖𝑓𝑑 (2.12)
𝑒1𝑑 =1
𝜔𝑏𝑎𝑠𝑒
𝑑𝜓1𝑑
𝑑𝑡+ 𝑅1𝑑𝑖1𝑑 = 0 (2.13)
𝑒1𝑞 =1
𝜔𝑏𝑎𝑠𝑒
𝑑𝜓1𝑞
𝑑𝑡+ 𝑅1𝑞𝑖1𝑞 = 0 (2.14)
𝜔𝑏𝑎𝑠𝑒 is nominal electrical angular speed.

9
In order to have a validated generator model, saturation also should be included.
The air gap flux linkage is calculated by Equation 2.15, 2.16 and 2.17.
𝜓𝑎𝑑 = 𝜓𝑑 + 𝐿𝑙𝑖𝑑 (2.15)
𝜓𝑎𝑞 = 𝜓𝑞 + 𝐿𝑙𝑖𝑞 (2.16)
𝜓𝑎𝑖𝑟 = √𝜓𝑎𝑑2 + 𝜓𝑎𝑑
22 (2.17)
𝜓𝑎𝑑 is d axis air gap flux linkage.
𝜓𝑎𝑞 is q axis air gap flux linkage.
𝜓𝑎𝑖𝑟 is air gap flux linkage.
After getting the air gap flux linkage, a saturation factor can be found, which is related to an
open circuit characteristic of the generator and the air gap flux linkage. The saturated induction
value can be calculated. They are shown in Equation 2.18, 2.19 and 2.20.
𝐾𝑠 = 𝑓(𝜓𝑎𝑖𝑟) (2.18)
If there is no saturation, Ks is a constant and equal to 1.
𝐿𝑎𝑑 = 𝐾𝑠 ∗ 𝐿𝑎𝑑𝑢 (2.19)
𝐿𝑎𝑞 = 𝐾𝑠 ∗ 𝐿𝑎𝑞𝑢 (2.20)
Moreover, the leakage inductance of a field circuit and a damper winding aren’t directly
given by the generator datasheet. In order to have a better understanding of the generator,
these values should be calculated. The time constants, transient inductance and sub transient
inductance of the generators are used to calculate those parameters [12] [13]. The calculation
equations are given in Equation 2.21, 2.22, 2.23, 2.24, 2.25 and 2.26.
𝐿𝑓𝑑𝑙 = 𝐿𝑓𝑑 − 𝐿𝑎𝑑 (2.21)
𝐿1𝑑𝑙 = 𝐿1𝑑 − 𝐿𝑎𝑑 (2.22)
𝐿1𝑞𝑙 = 𝐿1𝑞 − 𝐿𝑎𝑑 (2.23)
𝐿𝑓𝑑𝑙 = 𝐿𝑎𝑑 [(𝐿𝑑
′ −𝐿𝑙)
(𝐿𝑑−𝐿𝑑′ )
] (2.24)
𝐿1𝑑𝑙 = 𝐿𝑎𝑑𝐿𝑓𝑑𝑙
(𝐿𝑑" −𝐿𝑙)
[𝐿𝑎𝑑𝐿𝑓𝑑𝑙−𝐿𝑓𝑑(𝐿𝑑" −𝐿𝑙)]
(2.25)
𝐿1𝑞𝑙 = 𝐿𝑎𝑞 [(𝐿𝑎𝑞
" −𝐿1𝑞𝑙)
(𝐿𝑞−𝐿𝑞" )
] (2.26)

10
𝐿𝑓𝑑𝑙 is the rotor circuit leakage inductance.
𝐿1𝑑𝑙 is the d-axis leakage inductance.
𝐿1𝑞𝑙 is the q-axis leakage inductance.
𝐿𝑑′ is the d-axis transient inductance.
𝐿𝑑" is the d-axis sub transient inductance.
𝐿𝑎𝑞" is the q-axis sub transient inductance.
2.1.2 AVR and exciter
The automatic voltage regulator is designed to control the generator output voltage and the
reactive power output. Based on the recommendation from the AVR manufacturer, AVR and
the exciter model are built as the IEEE AC8B model [14] [15]. Its block diagram is shown in
Figure 2.2.
∑
+
VREF
-
VC
∑
VOEL
VUEL
+
+
Ka Ka
VRLMT/VTKA
0
∏
VT
KVHZ
VRLMT
0
∑
+
KVHZ
0
∏
FEX
FEX=f(IN)
FEX=f(IN)
KD
∑
-
+
∑ KE+
+
VX=VESE(VE)
EFD
IFD
Figure 2.2 Block diagram of an IEEE AC8B excitation system
Based on the requirements of the company, UEL, OEL, V/Hz limiter and softer starter should
also be added into the model.
Figure 2.3 and 2.4 show the block diagram of UEL and OEL [15]. The summing point type is
used for them. OEL and UEL both consist of outer loops and PI controller. Only the feedback
signals are different. The feedback signal of OEL is exciter current and the feedback signal of
UEL is the generator reactive power. Their outputs are added to the voltage set point of AVR to
control the AVR output. If the generator is over or under excited, the limiter outputs are
controlled by the reactive power set point or the exciter current with PI controller. Then their
outputs increase or decrease the set point of AVR to protect the generators.

11
∑ Kg-
+
+
∑1.5
0
1.5
0
VUELQ
QUEL_REF
Figure 2.3 Block diagram of under excitation limiter (UEL)
∑ Kg-
+
+
∑VREF
0
0VOEL
IEX
IOEL_REF
VREF
-1
Figure 2.4 Block diagram of over excitation limiter (OEL)
The V/Hz Limiter is designed to protect the generator from excessive magnetic flux that
results from low frequency or overvoltage. Its block diagram is shown in Figure 2.5. An
adjustable slope (KV/Hz) is to define the ratio between voltage and frequency. When the system
is in low frequency condition, the voltage reference is regulated by two parameters, the corner
frequency and an adjustable slope (KV/Hz). The adjustable slope (KV/Hz) defines the ratio
between voltage and frequency.
∑-
+
Generator Frequency
CornerFrequency
0
KVHZ ∏
VREF
VVHZ
Figure 2.5 Block diagram of V/Hz limiter
2.2 Diesel engine model
Many different kinds of prime mover are used in the marine power system, such as a
turbocharged medium speed diesel engine, a gas turbine and a steam turbine. However, the
most used prime mover in marine power system is the diesel engine. The diesel engine has
already been modeled by many kinds of models. The modeling complexity depends on the
applications in the model, which include the air-flow model, cylindrical combustion model and
system control. For Bakker Sliedrecht, only mechanical dynamics of the diesel engine should
be taken care of. And temperature, pressure and the cooling system should not be included.

12
The diesel engine model used here is based on the diesel engine model from L.Guzzella
and A. Amstutz [16], but doesn’t include temperature, pressure and cooling system. The
proposed diesel engine model is shown in Figure 2.6.
Figure 2.6 Configuration of diesel engine model
2.2.1 Engine model
The thermodynamic behavior is very difficult analyzing. Many papers have given many
models to simplify it. In this report, the mechanical torque is expressed as Equation 2.27, and
the thermal efficiency used here is a constant. In order to normalize the fuel mass flow, based
on the nominal torque, Equation 2.27 and 2.28, maximum mass of fuel flow injected into one
cylinder in one cycle can be calculated by Equation 2.29. After combining Equation 2.27 and
2.29, the normalized torque calculation is shown in Equation 2.30.
𝑇𝑚𝑒𝑐ℎ = 𝐻𝐿𝐻𝑉𝑚𝑓𝜂𝑡ℎ𝑒𝑟𝑚𝑎𝑙 (2.27)
𝜂𝑡ℎ𝑒𝑟𝑚𝑎𝑙 = 0.4 (2.28)
𝑚𝑓_𝑚𝑎𝑥 =𝑇𝑛𝑜𝑚𝑖𝑛𝑎𝑙
𝐻𝐿𝐻𝑉∗𝜂𝑡ℎ𝑒𝑟𝑚𝑎𝑙 (2.29)
𝑇𝑚𝑒𝑐ℎ =𝑚𝑓
𝑚𝑓_𝑚𝑎𝑥∗ 𝑇𝑛𝑜𝑚𝑖𝑛𝑎𝑙 (2.30)
𝐻𝐿𝐻𝑉 is the lower fuel heating value (42700 kJ/kg).
𝜂𝑡ℎ𝑒𝑟𝑚𝑎𝑙 is thermal efficiency.
𝑚𝑓 is the mass of fuel injected into one cylinder in one cycle.
The mass of fuel injected into one cylinder in one second is controlled by the governor. The
relationship between the mass of fuel injected into one cylinder in one second and that injected
into the diesel engine into one cylinder in one cycle is given in Equation 2.31.
Fuel Rack Position
Speed
Governor
Engine
(Thermo
dynamic)
Diesel engine output power
Output Torque
Speed Set point
Turbocharger
Emission control
(dP/dt control)
Fuel flow limit

13
𝑚𝑓 =𝑣∗2𝜋
𝜔𝑒�̇�𝑓 (2.31)
�̇�𝑓 is the mass of fuel injected into one cylinder in one second.
𝑣 is 2, if the number of strokes of diesel engine is 4.
𝜔𝑒 is the speed of the diesel engine
The mass of air injected into one cylinder in one second depends on the speed of the
turbocharger. Its calculation is given in Equation 2.32.
�̇�𝑎𝑖𝑟 = 𝑘𝑡𝑐𝜂𝑡𝑐𝜔𝑡𝑐 (2.32)
�̇�𝑎𝑖𝑟 is the mass of air into one cylinder in one second.
𝜂𝑡𝑐 is the efficiency of the turbocharger.
𝑘𝑡𝑐 is the mechanical factor of the turbocharger, which is related to dimension and
pressure ratio of the turbocharger.
The speed dynamic equation of the turbocharger is given in Equation 2.33.
�̇�𝑡𝑐 =1
𝐽𝑡𝑐(𝑇𝑡𝑐(𝑃𝑚𝑒𝑐ℎ) − 𝑇𝑡𝑐_𝑓(𝜔𝑡𝑐)) (2.33)
𝐽𝑡𝑐 is the inertia of the turbocharger
𝑇𝑡𝑐(𝑃𝑚𝑒𝑐ℎ) is the turbine torque. The turbocharger is driven by exhaust gas, and the
thermal and kinetic energy of exhaust gas are related with the diesel engine output power.
Therefore, the turbine torque is expressed as a function of diesel engine output power.
𝑇𝑡𝑐_𝑓(𝜔𝑡𝑐) is the friction of turbocharger which is related to the speed of turbocharger.
2.2.2 Governor
The governor is modeled by the PID controller and the droop control. The droop control is
prepared for active power sharing when generators are parallel [17]. The block diagram is
shown in Figure 2.7.
∑
+
-Speed sensor
Ka
PIDMAX
0
Droop Diesel engine output power
Speed setpoint Governor Output
-
Figure 2.7 Configuration of governor

14
Regarding PID controller, proportional gain, integral gain, derivative gain and derivative
filter time constant are set as the diesel engine manufacturer’s recommendation.
2.2.3 Emission control
Emission control is designed to prevent black smoke when a diesel engine is accelerating.
When there is a load step, the governor will give full fuel command to the fuel rack, because
the governor receives a positive speed error. However, because of the time delay of the
turbocharger, the rate of change of air flow cannot follow that of fuel. Then the ratio of fuel to
air becomes very large, and fuel cannot combust completely. The black smoke comes out.
Therefore, based on the recommended rate of change of power and maximum ratio of fuel
to air from datasheet of diesel engine [18], emission control limits maximum fuel flow quantity.
The equation of the ratio of fuel to air is shown in Equation 2.34. The maximum fuel flow
quantity is calculated by maximum ratio of fuel to air and the mass of air injected into one
cylinder in one second given by Equation 2.32. With the emission control, the diesel engine
doesn’t emit black smoke.
λ =�̇�𝑓
�̇�𝑎𝑖𝑟 (2.34)
λ is the ratio of fuel to air.
�̇�𝑓 is the mass of fuel injected into one cylinder in one second
�̇�𝑎𝑖𝑟 is the mass of air injected into one cylinder in one second.
Some types of diesel engine and governor don’t include the emission control. Therefore, an
enable input is used for the emission control.
2.3 Consumer load
The consumer load is also an important component of the single diesel generator model.
Two static load models are used in this chapter. They are the constant impedance and
constant power load.
2.3.1 Constant impedance load
The constant impedance load represents the passive loads, such as distribution network
and hotel loads. The active power and reactive power of it will be affected by voltage and
frequency variation. The constant impedance load can be represented by Equation 2.35 and
2.36. Based on the system nominal voltage, system nominal frequency, required active power

15
and required reactive power, the value of induction and resistance can be calculated as
Equation 2.37, 2.38 and 2.39.
𝑣 = 𝑖𝑍 (2.35)
𝑍 = 𝑅 + 𝑋𝑗 (2.36)
𝑅 =𝑣𝑛𝑜𝑚2
𝑃𝑠𝑒𝑡 (2.37)
𝑋 =𝑣𝑛𝑜𝑚
2
𝑄𝑠𝑒𝑡 (2.38)
𝑋 = 2𝜋𝑓𝑛𝑜𝑚𝐿 (2.39)
𝑣𝑛𝑜𝑚 is the system nominal voltage
𝑓𝑛𝑜𝑚 is the system nominal frequency
𝑃𝑠𝑒𝑡 is the active power set point under nominal voltage and frequency
𝑄𝑠𝑒𝑡 is the reactive power set point under nominal voltage and frequency
2.3.2 Constant power load
The variable frequency drive can be represented by a constant power load. The active
power and reactive power of constant power load cannot be influenced by voltage and
frequency variation. The dynamic equations of resistance and induction are shown in Equation
2.40, 2.41, 2.42 and 2.43.
𝑑𝑅
𝑑𝑡=
1
𝜏load(𝑃 − 𝑃𝑟𝑒𝑓) (2.40)
𝑑𝐿
𝑑𝑡=
1
𝜏𝑙𝑜𝑎𝑑(𝑄 − 𝑄𝑟𝑒𝑓) (2.41)
𝑍 = 𝑅 + 𝑋𝑗 (2.42)
𝑋 = 2𝜋𝑓𝐿 (2.43)
𝑃𝑟𝑒𝑓 is the active power set point
𝑄𝑟𝑒𝑓 is the reactive power set point
𝜏𝑙𝑜𝑎𝑑 is the time constant of constant power load

16
2.4 Validation
After building a completed diesel generator model, the model validation is the next step.
Because of not having enough measurement, until now, only generator model validation can
be realized and it can be accomplished by comparing the result of generator test with that of
simulation under same kind test.
First, based on the main generator datasheet and the exciter test, the parameters of main
generator and excitation system are input into the model. The datasheet of the generator is in
Appendix A.
Then, the generator voltage step test is used for the model validation. When the generator is
running at the nominal speed, a voltage step is given to the exciter stator. The test
configuration and measurement points (exciter stator current, main generator rotor voltage,
generator terminal voltage) are shown in Figure 2.8. And the test setup is shown in Figure 2.9.
G3~
E x c i t e r
E
A
V
V
Figure 2.8 Generator voltage step test configuration

17
Figure 2.9 Generator voltage step test setup
Furthermore, the same type of voltage step can be simulated in the model. After getting the
simulation results and the test measurements, the comparisons between them are shown in
Figure 2.10, 2.11 and 2.12.
Figure 2.10 Terminal voltage comparison
0.00
1000.00
2000.00
3000.00
4000.00
5000.00
6000.00
7000.00
8000.00
0 5 10 15
Term
inal
Vo
ltag
e(V
)
Time(s)
Terminal Voltage
Matlab Result
Measurement

18
Figure 2.11 Main generator rotor voltage comparison
Figure 2.12 Exciter stator current comparison
Because the three phase short circuit test is harmful to the generators, the vessel owner
doesn’t want to do this test. Therefore, we can’t get its waveform data. But we can get related
data from generator datasheet. In order to accomplish the short circuit comparison, first, we
can simulate the three phase short circuit test in the model. Then, based on the recommended
synchronous generator parameter measurement and calculation from IEEE [19] and IEC [20],
the simulation waveform, shown in Figure 2.13, can be transferred to the short circuit
-10
0
10
20
30
40
50
60
0 2 4 6 8 10 12 14
Mai
n G
en
era
tor
Ro
tor
Vo
ltag
e(V
)
Time(s)
Main Generator Rotor Voltage
Matlab Result
Measurement
-0.5
0
0.5
1
1.5
2
2.5
3
-1 1 3 5 7 9 11 13 15
Exci
ter
Stat
or
Cu
rren
t(A
)
Time(s)
Exciter Stator Current
Matlab Result
Measurement

19
parameters that are stated in the generator datasheet. Finally, after comparison, the results of
simulation fit those of the generator datasheet.
Figure 2.13 Simulation short circuit test current waveform
Because the diesel engine test measurement can’t be obtained, the validation of diesel
engine isn’t included in this thesis, which should be finished after this thesis.
Even though the diesel engine is not validated, the dynamic behavior of the diesel generator
under a constant power load step test should be investigated. A constant power load step is
implemented in a test and the simulation model. Its active power is 1MW and PF is 0.995.
There are two load steps shown in Figure 2.14. The first one is implemented on 65s and the
other one is on 90s.
Figure 2.14 Voltage and frequency comparison between simulation and measurement
Based on a constant power load step comparison, a small difference can be found. There
are two reasons resulting in this difference. The first one is that the diesel engine is not
validated, and more controllers should be added to the diesel engine model. The second
reason is that there is the different load value between simulation and practice, and we can’t
set completely the same value for both situations.

20
3. Three parallel diesel generators
model
After finishing the single diesel generator model, the three parallel diesel generators model
can be built. The three diesel generator sets are the same in it. The configuration of the three
parallel diesel generators model and the measurement locations are shown in Figure 3.1.
Besides connecting three single diesel generator models to the same bus, synchronization
function as well as active and reactive power sharing also should be added to the three parallel
diesel generators model [21]. Droop controls are built inside the AVR and the governor. In this
Section, the detail description of them will be given.
After building the whole three parallel diesel generators model, in order to understand the
behavior of the model, different scenarios are simulated. They are a constant impedance load
step test, 7 defined excitation system faults and 5 defined prime mover faults [22].
G3~
G3~
G3~
dP/dtlimit
dP/dtlimit
dP/dtlimit
Load Load Load
DG set1 DG set2 DG set3
Diesel Engine Output Power
Exciter Current
Active Power Reactive Power
Net Frequency Net Voltage
Figure 3.1: Three parallel diesel generators model configuration and measurement position.

21
3.1 Active and reactive power droop
In order to finish the active power and reactive power sharing in the three parallel diesel
generators model, the active and reactive power droop need to be built.
Regarding the active power droop, the compensated droop is used for it. Its slope is 4%.
The compensated droop controls the frequency of operation point as 60Hz by increasing or
decreasing the speed set point. The highest frequency on the droop line reaches when the
diesel engine takes no load, and the lowest frequency on the droop line reaches when the
diesel engine takes full load. The formula expression of active power droop is given in
Equation 3.1. Its diagram expression, when the generator takes no load, is given in Figure 3.2.
Droop% =No load frequency – Full load frequency
No load frequency ∗ 100 (3.1)
Figure 3.2 Active power droop
Regarding the reactive power droop, it uses fixed droop. Its slope is 5%. In the fixed reactive
power droop, the voltage set point doesn’t change with the operation point. The highest
voltage on the droop line reaches when the generator takes no reactive power, and the lowest
voltage on the droop line reaches when the generator takes the same value of reactive power
as the value of its rated apparent power. The formula expression of reactive power droop is
given in Equation 3.2. Its diagram expression is given in Figure 3.3.
Droop% =no reactive power voltage−full reactive power voltage
no reactive power voltage ∗ 100 (3.2)
0W; 60Hz
3,84MW; 57,6Hz
57
57.5
58
58.5
59
59.5
60
60.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
Fre
qu
en
cy(H
z)
Diesel Engine Output Power (MW)
Active Power Droop

22
Figure 3.3: Reactive power droop
3.2 Load step test
The load step test is implemented on the 3 parallel diesel generators model. The load used
in the test is a constant impedance load. The impedance value of load is calculated by the set
active power and reactive power under nominal frequency and voltage. A 3MW and PF = 0.95
load step is implemented at 20s. The dP/dt limitation of the load step is 1MW/s. The simulation
results of the load step test are shown in Figure 3.4. The oscillation of voltage in Figure 3.4
results from the AVR PID parameter setting.
4,1MVar; 6,6kV
0Var; 6,93kV
6.55
6.6
6.65
6.7
6.75
6.8
6.85
6.9
6.95
0 1 2 3 4 5
LL V
olt
age
(KV
)
Reactive Power(MVar)
Reactive Power Droop

23
Figure 3.4: Load step test simulation results
3.3 Excitation system and prime mover faults
simulation results
Understanding the behaviors of the generator during excitation system and prime mover
faults is an important step to build CDG. 7 kinds of excitation system faults and 5 kinds of
prime mover faults are simulated in this section.
3.3.1 Excitation system faults simulation results
In the excitation system fault simulation, before the faults, each generator is taking 2MW
constant impedance load (PF =0.95), and 7 kinds of excitation system faults are tested. The
first 3 faults are related to AVR. The other 4 faults are related to the exciter and generator rotor.
All excitation system faults are implemented only on DG set 1 (Gen1) at 20s.

24
Fault 1 and Fault2 are that the AVR output suddenly increases or decreases 10% AVR
output voltage and fixes. Fault 3 is that the AVR output increases to maximum. Figure 3.5
gives their configuration.
Figure 3.5: Fault 1, 2 and 3 configuration
The other 4 faults are short circuit or open circuit occurring on the exciter stator or the main
generator rotor. Figure 3.6 gives their configuration.
AVR
Fault4
Fault 5
Fault6
Fault 7
Exciter Current transducer
Figure 3.6: Fault 4, 5, 6 and 7 configuration
All excitation system faults scenarios are concluded below:
Fault 1: AVR output increases 10% and fixes.
Fault 2: AVR output decreases 10% and fixes.
Fault 3: AVR output increases to maximum.
Fault 4: Exciter stator open circuit.
Fault 5: Exciter stator short circuit.
Fault 6: Main generator rotor open circuit.
Fault 7: Main generator rotor short circuit.
Fault 1 and Fault 2 simulation results are shown in Figure 3.7 and 3.8. The other 5 faults
results are given in Appendix B.
AVR
Exciter
Stator
Fault 1/2: 1.1 or 0.9 times the AVR output before the fault Fault 3: Maximum output of AVR E

25
Figure 3.7: Fault 1(AVR increases 10% its output) simulation results

26
Figure 3.7: Fault 2(AVR decreases 10% its output) simulation results
We can find that, during excitation system faults, the reactive power of the faulty generator
deviates that of the healthy generators, meanwhile, the total reactive power doesn’t change,
because voltage has nearly no change. Furthermore, even though the faulty generator
absorbs or provides abnormal reactive power, the healthy generators still follow the reactive
power droop to maintain voltage. The exciter current has the same behavior as the reactive
power.

27
3.3.2 Prime mover faults simulation results
In the prime mover fault simulation, before the faults, each generator is taking 2MW constant
impedance load (PF =0.95), and 5 kinds of prime mover faults are tested. The first 2 faults are
related to governor. They are that the position of fuel rack will move up or down 20% of the
position before the fault and fixes. The other 3 faults are related to diesel engine. The diesel
engine suddenly takes no load (ex. The fuel pipe is blocked), full load or no speed (ex. The
piston is blocked) instantly. Prime mover faults will be implemented only in DG set 1 (Gen1) at
20s.
Prime mover fault scenarios are concluded below:
Fault 8: The position of fuel rack increases 20% and fixes.
Fault 9: The position of fuel rack decreases 20% and fixes.
Fault 10: The diesel engine takes full load.
Fault 11: The diesel engine takes no load.
Fault 12: The diesel engine is blocked instantly.
The Fault 8 and Fault 9 simulation results are shown in Figure 3.8 and 3.9. The other 3 faults
results are given in Appendix B.

28
Figure 3.8: Fault 8 (Diesel engine fuel rack increases 20%) simulation results
Figure 3.9: Fault 9 (Diesel engine fuel rack increases 20%) simulation results

29
Regarding prime mover faults, the active power of the faulty generator deviates that of the
healthy generators. Meanwhile, the total active power is almost constant, because voltage and
frequency have nearly no change. Even though faulty generator absorbs or provides abnormal
active power, the healthy generators still follow active power droop to maintain frequency.
Regarding exciter current, exciter current has the same behavior as active power after 21s.
However, between 20s and 21s, there is a dynamic period in exciter current.
4. Common diesel generator
protection design
With understanding the performance of faulty and healthy generators during the excitation
system and prime mover faults and concluding their characteristics, a protection method
especially for excitation system and prime mover can be found. The system is named as
Common Diesel Generator protection (CDG). It should include two parts. The first part is fault
detection, which can detect the faulty generator. The other part is the logical control of CDG to
decide the response of it.
For the first part, the main functions of fault detection in CDG are listed below:
1. Excitation system detection
2. Prime mover detection
3. Voting system
4. Operation window
They will be described in sub section 4.2, 4.3, 4.4, 4.5 and 4.6. The content of logical control
will be given in sub section 4.7.
4.2 Excitation system detection
4.2.1 Mechanism
Based on the excitation system fault simulation results in section 3.3, we can find out that
voltage, reactive power and exciter current will deviate from the value before the fault. It can be
named as the expected value and normal operation value.
After analyzing all excitation system faults simulation results, Table 4.1 and 4.2 conclude the
deviation and derivative of the faulty and healthy generator. The deviation is remarked by blue

30
boxes and derivative is remarked by purple boxes.
In the tables, 𝑄 means the actual reactive power. 𝑄𝑒𝑥𝑝 means the expected reactive
power. 𝑉 means the actual generator voltage. 𝑉𝑒𝑥𝑝 means the expected generator
voltage. 𝐼𝑒𝑥 means the actual exciter current and 𝐼𝑒𝑥_𝑒𝑥𝑝 means the expected exciter current.
Table 4.1 The performance of faulty generator during different kinds of situations
Table 4.2 The performance of healthy generator during different kinds of situations
By analyzing the tables above, we can sort these 8 conditions into 3 groups. The green
group is Normal Operation. The Orange group is AVR Dependent Fault. And the Red group is
AVR Independent Fault (generator internal fault).
In order to detect the faulty generator, we need find out the boundary of generator behavior
between normal and faulty operation, and the boundary between the faulty generator and
healthy generator during faults.
Conditions
𝑄
𝑑𝑄
𝑑𝑡
𝑄 − 𝑄𝑒𝑥𝑝
𝑉
𝑑𝑉
𝑑𝑡
𝑉 − 𝑉𝑒𝑥𝑝
𝐼𝑒𝑥
𝑑𝐼𝑒𝑥
𝑑𝑡
𝐼𝑒𝑥 − 𝐼𝑒𝑥_𝑒𝑥𝑝
Load step
>0
+
≈ 0
>0
-
≈0
>0
+
≈0
Fault1: AVR output increases 10%
>0
+
>0
>0
+
>0
>0
+
>0
Fault2: AVR output decreases 10%
>/<0
-
<0
>0
-
<0
>0
-
<0
Fault3: AVR output increases to maximum
>0
++
>0
>0
+
++
>0
++
>0
Fault4: Exciter stator Open circuit
<0
--
<0
>0
--
<0
=0
--
<0
Fault5: Exciter stator short circuit
<0
--
<0
>0
--
<0
>0
++
>0
Fault6:Main generator rotor short circuit
<0
--
<0
>0
--
<0
>0
++
>0
Fault7:Main generator rotor open circuit
<0
--
<0
>0
--
<0
>0
++
>0
Conditions
𝑄
𝑑𝑄
𝑑𝑡
𝑄 − 𝑄𝑒𝑥𝑝
𝑉
𝑑𝑉
𝑑𝑡
𝑉 − 𝑉𝑒𝑥𝑝
𝐼𝑒𝑥
𝑑𝐼𝑒𝑥
𝑑𝑡
𝐼𝑒𝑥 − 𝐼𝑒𝑥_𝑒𝑥𝑝
Load step
>0
+
≈ 0
>0
-
≈0
>0
+
≈0
Fault1: AVR output increases 10%
>/<0
-
<0
>0
+
>0
>0
-
<0
Fault2: AVR output decreases 10%
>0
+
>0
>0
-
<0
>0
+
>0
Fault3: AVR output increases to maximum
<0
--
<0
>0
+
++
≈ 0
--
<0
Fault4: Exciter stator Open circuit
>0
++
>0
>0
--
<0
>0
++
>0
Fault5: Exciter stator short circuit
>0
++
>0
>0
--
<0
>0
++
>0
Fault6:Main generator rotor short circuit
>0
++
>0
>0
--
<0
>0
++
>0
Fault7:Main generator rotor open circuit
>0
++
>0
>0
--
<0
>0
++
>0

31
First, we discuss about the boundary of generator behavior between normal operation and
faults. Voltage, reactive power and exciter current will all follow the droop regulation and be
closed to the expected value. Only the voltage deviates from the expected value a little bit,
because of dynamic. However, during the faults, reactive power and voltage deviates from the
expected value a lot. Therefore, by analyzing the behavior of reactive power and voltage, the
boundary of generator behavior between normal operation and faults can be found.
Then, we discuss about the boundary of generator behavior between the faulty generator
and healthy generator during faults. We can find that voltage, reactive power and exciter
current of healthy generators can follow the droop regulation. However, voltage, reactive
power and exciter current of faulty generators doesn’t follow the droop regulation.
Furthermore, during the different groups of faults, the behaviors of generators are also
different. In the AVR Dependent Fault, the deviation and derivative of voltage, reactive power
and exciter current have the same direction. In the AVR Independent Fault, the deviation and
derivative of exciter current has the opposite direction to that of voltage and reactive power.
Therefore, we can have a clear boundary among healthy generators, a generator with AVR
Dependent Fault and a generator with AVR Independent Fault.
In derivative analysis, we also can find out that there is a same boundary between faulty
generator and healthy generator as deviation analysis. However, during the faults, some
transients occur in each parameter, which lead the boundary between the healthy and faulty
generator not be clear as that of deviation. Therefore, derivative detection cannot be a decisive
detection function.
Above all, we can use the characteristic of deviation and derivative during excitation system
faults to detect the faulty generator.
4.2.2 Expected value calculation
In this section, the calculation of expected value is discussed.
Expected reactive power
In normal operation, the reactive power of each generator will be controlled by reactive
power droop, and the whole reactive power online will be shared by generators evenly.
It means that the expected reactive power of each generator can be calculated by Equation
4.1.
𝑄𝑒𝑥𝑝 =𝑄𝑛𝑒𝑡
𝑛 (4.1)

32
𝑄𝑛𝑒𝑡 is the total reactive power online
𝑛 is the number of generators online.
Expected voltage calculation
In reactive power load sharing, we use fixed reactive power droop. Therefore, based on the
droop setting and expected reactive power of the generator, we can get the expected voltage.
The expected voltage can be calculated as Equation 4.2.
𝑉𝑒𝑥𝑝 = 𝑉𝑠𝑒𝑡 − 𝑄𝑒𝑥𝑝 ∗ 𝑑𝑟𝑜𝑜𝑝% (4.2)
𝑉𝑠𝑒𝑡 is the terminal voltage when the generator takes no reactive power.
Expected exciter current calculation
Figure 4.1 shows the simplified single line diagram of a brushless synchronous generator.
Eex
RexRf
E
Xd
Exciter Generator
Iex If
Figure 4.1 Brushless synchronous generator simplified single line diagram
According to the generator test, we know that the relation among exciter current (𝐼𝑒𝑥), exciter
rotor internal voltage (𝐸𝑒𝑥) and main generator rotor current (𝐼𝑓) is almost linear, and the exciter
has nearly no saturation in its operation region. Therefore, we can get the relationship shown
in Equation 4.3.
𝐼𝑒𝑥 ∝ 𝐸𝑒𝑥 ∝ 𝐼𝑓 (4.3)
When we talk about the relationship between the main generator rotor current (𝐼𝑓) and the
main generator internal voltage (𝐸), there is saturation between them. We can use linear line to
replace the saturation curve in generator operation region. It means that 𝑋𝑑 is constant in
certain operation region. The reason why 𝑋𝑑 is constant is that 𝑋𝑑 changes with the
saturation condition of air gap in the generator and, the saturation condition of air gap will keep
almost constant during operation, because the output voltage of generator changes very small
(AVR function and droop). In other words, the generator terminal voltage (not induced voltage)
is related to the flux in air gap. And flux in air gap determines the saturation level in air gap and
the value of 𝑋𝑑.

33
Figure 4.2 Synchronous generator open and short circuit characteristic curve
Furthermore, based on Figure 4.2 [23], using the Modified air gap line (Oc), we can find out
the value of 𝑋𝑑 under the rated terminal voltage. This value also can be found in the
datasheet of generator. It is named as Saturated 𝑋𝑑.
The active power and reactive power of the synchronous generator can be calculated by
Equation 4.4 and 4.5 [24].
𝑃 =|𝑉𝑡||𝐸|
𝑋𝑑𝑠𝑖𝑛𝛿 (4.4)
𝑄 =|𝑉𝑡|
𝑋𝑑(|𝐸|𝑐𝑜𝑠𝛿 − |𝑉𝑡|) (4.5)
𝑃 is the active power of the generator.
𝑉𝑡 is the terminal voltage of the generator.
𝛿 is the phase angle between terminal voltage and internal voltage.
𝑄 is the reactive power of the generator.
At steady state, based on the reactive power droop and constant 𝑋𝑑, we can get internal
voltage and main generator rotor current by combining Equation 4.4 and 4.5. Their calculation
are given in Equation 4.6 and 4.7,
𝐸 ≅ 𝐼𝑓 ∗ 𝑋𝑑 =√(𝑋𝑑𝑄+𝑉𝑡
2)2+(𝑃𝑋𝑑)2
Vt (4.6)
𝐼𝑓 = √(𝑃
𝑉𝑡)2 + (
𝑄
𝑉𝑡+
𝑉𝑡
𝑋𝑑)2 (4.7)

34
Equation 4.9 is obtained by using Equation 4.8 to replace 𝑉𝑡 in Equation 4.7. Now the
relationship between main generator rotor current (𝐼𝑓), active power (𝑃) and reactive power (𝑄)
is known.
𝑉𝑡 = 1.05 − 0.05 ∗ 𝑄 (4.8)
𝐼𝑓 ≈ √(𝑃
1.05−0.05∗𝑄)2 + (
𝑄
1.05−0.05∗𝑄+
1.05−0.05∗𝑄
𝑋𝑑)2 (4.9)
Then, based on Equation 4.9, we can plot the diagram of the main generator rotor current
and the reactive power under different active power (here we use 𝑋𝑑 as 1.1pu). The diagram
is shown in Figure 4.3.
Figure 4.3 The relation between the main generator rotor current and the reactive
power under different active power
According to Figure 4.3, the conclusion shows that under certain value of active power (𝑃),
main generator rotor current (𝐼𝑓) has the linear relation with reactive power (𝑄). Therefore,
based on Equation 4.3, we can conclude the relationship among active power (𝑃), reactive
power (𝑄), and exciter current (𝐼𝑒𝑥). It is shown in Equation 4.10.
𝐼𝑒𝑥 = [𝑆𝑙𝑜𝑝𝑒(𝑃𝑒𝑥𝑝) ∗ 𝑄𝑒𝑥𝑝 + 𝐼𝑛𝑡𝑒𝑟𝑐𝑒𝑝𝑡(𝑃𝑒𝑥𝑝)] (4.10)
The function “Slope” and “Intercept” can be decided by various PF load test measured data.
Equation 4.10 is only applied when the system uses the compensated active power droop. If
the fixed active power droop is used in the system, a factor related to the frequency should be
0
0.5
1
1.5
2
2.5
0 0.2 0.4 0.6 0.8 1
I f(p
u)
Q(pu)
1.0pu P
0.8pu P
0.6pu P
0.4pu P
0.2pu P

35
added. The relationship between the frequency and exciter current is shown in Equation 4.11.
𝑉𝑡 ∝ 𝐼𝑓 ∗ 𝑓 ∝ 𝐼𝑒𝑥 ∗ 𝑓 (4.11)
And the expected exciter current calculation changes from Equation 4.10 to 4.12.
𝐼𝑒𝑥 = [𝑆𝑙𝑜𝑝𝑒(𝑃𝑒𝑥𝑝) ∗ 𝑄𝑒𝑥𝑝 + 𝐼𝑛𝑡𝑒𝑟𝑐𝑒𝑝𝑡(𝑃𝑒𝑥𝑝)] ∗ 𝐶𝑜𝑛𝑠𝑡𝑎𝑛𝑡 ∗ 𝑓 (4.12)
4.3 Prime mover detection
4.3.1 Mechanism
Based on the prime mover fault simulation result in section 3.3, we can find out that
frequency, active power and exciter current will deviate from the value before the faults. It also
can be named as the expected value and normal operation value.
After analyzing all prime mover faults simulation results, Table 4.3 and 4.4 conclude the
deviation value and derivative of the faulty and healthy generator. The deviation is remarked
by blue boxes and derivative is remarked by purple boxes.
In the tables, 𝑃 means the actual active power. 𝑃𝑒𝑥𝑝 means the expected active power. 𝑓
means the actual generator frequency. 𝑓𝑒𝑥𝑝 means the expected generator frequency. 𝐼𝑒𝑥
means the actual exciter current and 𝐼𝑒𝑥_𝑒𝑥𝑝 means the expected exciter current.
Table 4.3 The performance of faulty generator during different kinds of situations
Conditions
𝑃
𝑑𝑃
𝑑𝑡
𝑃 − 𝑃𝑒𝑥𝑝
𝑓
𝑑𝑓
𝑑𝑡
𝑓 − 𝑓𝑒𝑥𝑝
𝐼𝑒𝑥
𝑑𝐼𝑒𝑥
𝑑𝑡
𝐼𝑒𝑥 − 𝐼𝑒𝑥_𝑒𝑥𝑝
Load step
>0
+
≈ 0
>0
-
≈/< 0
>0
+
≈ 0
Fault8: Fuel rack increases 20%
>0
+
>0
>0
+
>0
>0
+
>0
Fault9: Fuel rack decreases 20%
>/<0
-
<0
>0
-
<0
>/=0
-
<0
Fault10: Fuel rack increases to maximum
>0
++
>0
>0
+
>0
>0
+
>0
Fault11: Diesel engine suddenly
takes no load
>/<0
--
<0
>0
--
<0
>/=0
--
<0
Fault12: Diesel engine has no
speed
>/<0
++/--
>/<0
>0
-
>/<0
>/=0
++/--
>/<0

36
Table4.4 The performance of healthy generator during different kinds of situations
Also, we can divide all conditions into three groups shown in the tables above. The green
group is Normal Operation. The orange group is Prime Mover Dependent Fault. The red group
is Prime Mover and Excitation System Dependent Fault. The red group will be discussed
separately. First we find the boundary of generator behavior between normal operation and
faults, and the boundary between the faulty generator and healthy generator during Prime
Mover Dependent Fault. During Normal Operation or Prime Mover Dependent Fault, active
Power (𝑃) and frequency (𝑓) of the healthy generators always follows the active power droop.
During Prime Mover Dependent Fault, active power and frequency of faulty generators change
in the same direction and don’t follow the active power droop.
In derivative analysis, we also can find out that there is the same boundary between faulty
generator and healthy generator as that in deviation analysis. However, during the fault, some
dynamics occur in each parameter, which lead the boundary between healthy and faulty
generator not to be clear as that of deviation. Therefore, derivative cannot be a decisive
detection function.
Furthermore, based on the simulation result and conclusion, even though exciter current
(𝐼𝑒𝑥) has the same behavior as active power (𝑃) in short time after the fault, the dynamic time
of exciter current after prime mover fault is so long that it is easy to lead CGD to have a wrong
response. Therefore, exciter current is not used as a detection parameter in the prime mover
detection.
At last, the red group fault is discussed. Because rotor is blocked, active power of the faulty
generator oscillates with net frequency. It isn’t suitable to be a detection parameter anymore.
However, the excitation system stops to work, because there is no speed on the rotor and no
voltage output from the exciter rotor. It means that during this fault, Orange group fault of
excitation system also exists in this fault. Therefore, we can use the detected method of the
excitation system orange group fault to detect this fault.
Conditions
𝑃
𝑑𝑃
𝑑𝑡
𝑃 − 𝑃𝑒𝑥𝑝
𝑓
𝑑𝑓
𝑑𝑡
𝑓 − 𝑓𝑒𝑥𝑝
𝐼𝑒𝑥
𝑑𝐼𝑒𝑥
𝑑𝑡
𝐼𝑒𝑥 − 𝐼𝑒𝑥_𝑒𝑥𝑝
Load step
>0
+
≈ 0
>0
-
≈/< 0
>0
+
≈ 0
Fault8: Fuel rack increases 20%
>/<0
-
<0
>0
+
>0
>/=0
-
<0
Fault9: Fuel rack decreases
20%
>0
+
>0
>0
-
<0
>0
+
>0
Fault10: Fuel rack increases to maximum
</>0
--
<0
>0
+
>0
>0
+
>0
Fault11: Diesel engine suddenly
takes no load
>0
++
>0
>0
--
<0
>0
++
>0
Fault12: Diesel engine has no
speed
>/<0
++/
--
>/<0
>0
-
>/<0
>/=0
++/--
>/<0

37
4.3.2 Expected value calculation
In this section, the calculation of expected value is discussed.
Expected active power
In normal operation, the active power of each generator will be controlled by active power
droop, and the whole active power online will be shared by generators even.
It means that the expected active power can be calculated by Equation 4.13.
𝑃𝑒𝑥𝑝 =𝑃𝑛𝑒𝑡
𝑛 (4.13)
𝑃𝑛𝑒𝑡 is the total active power online
𝑛 is the number of generators online.
Expected frequency calculation
In active power load sharing, we use compensated droop. In compensated droop control, it
prefers to keep the frequency as 60Hz by changing the speed set point of the diesel engine.
Therefore, the speed set point, expected active power and active power droop should be used
for the expected frequency calculation. It is shown in Equation 4.14.
𝑓𝑒𝑥𝑝 = 𝑓𝑠𝑒𝑡 − 𝑃𝑒𝑥𝑝 ∗ 𝑑𝑟𝑜𝑜𝑝% (4.14)
𝑓𝑠𝑒𝑡 is the speed set point of the diesel engine
4.4 Voting system
The voting system is a function to help excitation system detection and prime mover
detection to detect the faulty generator. It can only be used when there are three or more than
three generators parallel online.
The mechanism of the voting system is that, each generator will compare with each other on
one parameter. If the system detects that there are some generators (less than the total
number of generators online) going to the opposite direction to the other generators, when the
deviation is larger than the setting value, the system will think the generators in the small group
as the faulty generators. The advantage of the voting system is that we can just use one
parameter to find faulty generator. However, the disadvantages are that the voting system is
not good at finding a common fault among 2 or more than 2 generators, and it cannot be used
in a two parallel generator sets system. Therefore, we prefer to use voting system as a
secondary detection method.

38
4.5 Operation window
During DP operation, the ship prefers to run under a smooth condition. It means that the
system should tolerate some small excitation system or prime mover faults. And the function of
the operation window is to define a tolerance region for the system. The operation window is
shown in Figure 4.4, the green area means a safe area. The dash yellow indicates the
boundary of the green area. And the red line is defined by the threshold of the primary
protection. Even if the excitation system detection or prime mover detection find the faulty
generator, the CGD will only give alarm and not trip the faulty generator, if all the generators
are in the green area. When the system doesn’t find the faulty generator, and one parameter
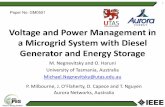
goes out of the red region, the bus tie circuit breaker should open immediately.
Figure 4.4 Operation window (PQ operation window on the top left, active power droop
on the top right, reactive power droop on the bottom)
Rated Power
Q (Kvar)
Terminal Voltage (V)
Q (Kvar)
P (Kw) P (kW)
Frequency (Hz)

39
4.6 Deviation detection simulation results
Based on the concepts described in section 4.1 and 4.2. The detection model of it is built.
Because deviation is a decisive parameter, the deviation of load step test, Fault 1, 2, 8 and 9
are given in Figure 4.5, 4.6, 4.7, 4.8 and 4.9. The deviation results of other faults are given in
Appendix C. The derivative results of all conditions are given in the folder.
Figure 4.5 Load step test, the deviation of parameters

40
Figure 4.6 Fault1 (AVR increases 10% its output), the deviation of parameters
Figure 4.7 Fault2 (AVR decreases 10% its output), the deviation of parameters

41
Figure 4.8 Fault8 (Diesel engine fuel rack increases 20%), the deviation of parameters
Figure 4.9 Fault9 (Diesel engine fuel rack decreases 20%), the deviation of parameters

42
The simulation results give us the same conclusion as Table 4.1, 4.2, 4.3 and 4.4. During the
load step test, the difference between measured exciter current and exciter current function
output is very small and is much smaller than the exciter current deviation during excitation
system fault. Therefore, the expected exciter current calculation is acceptable.
In Figure 4.8 and 4.9, during prime mover faults, even though the exciter current can give us
the right conclusion after 21s, the dynamics between 20s and 21s is so large that it is easy to
lead the system’s wrong response. Therefore, for safe aspect, exciter current will not be taken
into account to detect prime mover faults.
4.7 CDG structure in simulation
After building and testing the detection blocks of CDG, which are main functions of CDG,
voting system and dynamic window can be added to complete the CDG model. Figure 4.8
shows the logical structure of the prime mover detection with dynamic windows and voting
system. Figure 4.9 shows logical structure of excitation system detection with dynamic
window.
There are 3 deviation detection blocks to detect orange and red group faults in excitation
system and prime mover. Each deviation detection block has its own deviation level block to
determine how heavy the fault is. If the deviation remains in first level, there is no alarm from
CGD. If the deviation passes beyond the first deviation level and stay in the second deviation
level, the CDG gives alarm. CDG gives a tripping command, if one generator runs out of green
area of dynamic window or the deviation of the faulty generator excesses the second deviation
level.
According to the characteristic of derivative detection, the derivative detection is used to
detect heavy fault. If the derivative detection and deviation detection give alarms at the same
time, a trip command is sent out by CDG after a short time delay.
Because of the weakness of voting system, voting system will sent an alarm when one
generator is running out of green area of dynamic area. If the faults still are there after very
long time delay, the voting system sends a trip command.
The parameters of the whole system depend on the generator datasheet and the system
configuration.

43
Fig
ure
4.8
Config
ura
tion o
f excita
tion s
yste
m p
rote
ctio
n in
CD
G

44
Fig
ure
4.9
Config
ura
tion o
f prim
e m
over p
rote
ctio
n in
CD
G

45
5. CDG validation
According to the proposal of this master thesis, the CDG is supposed to be a commercial
production later. Therefore, the validation of CDG should be implemented. In order to finish
this step, a test setup for CDG should be built and CDG simulation block should be transferred
into PLC program. At last, the CDG can be tested by implementing excitation system and
prime mover faults on the test setup when the CDG PLC program is running.
5.1 Test setup
The setup consists of three generator sets, a main switch board and loads. The setup
configuration is shown in Figure 5.1.
Fig
ure
5.1
Config
ura
tion o
f CD
G te
st s
etu
p

46
Regarding the prime mover, because the company doesn’t have its own diesel engines for
tests, motors with frequency drives are used as prime movers to replace the diesel engines. 2
kinds of generators are used in the setup. The generator set 1 and 2 use one kind of generator,
which datasheet is given in Appendix D. The generator set 3 uses another kind of generator,
which datasheet is given in Appendix E.
Two pure resistors and a motor with frequency drive are used as loads in the setup. The
frequency drive can determines how much reactive power it requires. And the motor drives
another motor that determines the required active power and plays a role as a generator to
feed energy back to the system.
The synchronization function of this setup is realized by auto synchronization module. The
reactive power droop is same for all the generator sets. Its setting is shown in Figure 5.2.
However, generator set 3 has the different active power droop from generator set 1 and 2.
The reason why different active power droop uses for generator set 2 and 3 is that they can
always have the same per unit active power value. This kind of active power setting can
prevent the diesel engine from overload. The active power droop setting of generator set 1 and
2 is shown in Figure 5.3. And the active power droop setting of generator set 3 is shown in
Figure 5.4.
Figure 5.2 Setup reactive power droop.
0 kVar, 400V
36 kVar, 380V
375
380
385
390
395
400
405
0 5 10 15 20 25 30 35 40
Genera
tor
Term
inal V
oltage (
V)
Reactive Power(kVar)
Setup Reactive Power Droop

47
Figure 5.3 Generator 1 and 2 active power droop
Figure 5.4 Generator 3 active power droop
This is the final version of the test setup. The generator set 1 and 2 are new generators and
ordered from the manufacturer on April. The first new generator is in storage and delivered
very fast. However, the second new generator is not in storage and the delivery time of it is
very long. Therefore, in this master thesis, only generator set 2 and 3 are used to build two
parallel generator sets system. The three parallel generator sets system will be investigated
after this master thesis.
0 kW, 52 Hz
34 kW, 50 Hz
49.5
50
50.5
51
51.5
52
52.5
0 5 10 15 20 25 30 35 40
Fre
quency (
Hz)
Active Power (kW)
Generator 1 and 2 Active Power Droop
0 kW, 52 Hz
28.8 kW, 50 Hz
49.5
50
50.5
51
51.5
52
52.5
0 5 10 15 20 25 30 35
Fre
quency (
Hz)
Active Power (kW)
Generator 3 Active Power Droop

48
After building the two parallel generator sets setup, some photos are taken from the setup.
The generator set 2 is shown in Figure 5.4.
Figure 5.4 Generator set 2
The generator set 3 is shown in Figure 5.5.
Figure 5.5 Generator set 3

49
The drive cabinets for the motors are shown in Figure 5.6
Figure 5.6 Drive cabinets
The main switch board is shown in Figure 5.7
Figure 5.7 Main switch board

50
The motor load is shown in Figure 5.8
Figure 5.8 Motor load

51
5.2 Test setup generator validation
After building the test setup, the generators in the test setup should be validated by the
Matlab Simulink model. There are two reasons for these validations. The first one is that it is
easy to conclude the formula for expected value calculation. The second one is that more tests
will be done on this test setup after this Master Thesis, and these tests results are very useful
to understand and improve the generator model.
The test used to validate the generators on the test setup is the same test mentioned in
Section 2.4. In order to get more measurement points, a modification is done to the generator
2. A copper ring is added on the generator 2 rotor to measure the main generator rotor voltage.
The structure of the modification is shown in Figure 5.9.
Figure 5.9 Modification of generator 2
However, due to the structure of generator 3, this modification cannot be done on generator
3. Therefore, the measurement points of generator 2 are exciter current, main generator rotor
voltage and terminal voltage. The measurement points of generator 3 are exciter current and
terminal voltage. In the model, the diesel engine model mentioned in Section 2.2 represents
the motor with the variable frequency drive.
After doing tests on the generators and tuning the parameters of the generator models,
comparisons between the test results and the simulation results are concluded. Figure 5.10,
5.11 and 5.12 show the comparisons of generator 2, and Figure 5.13 as well as 5.14 show the
comparisons of generator 3
Brush
Rotor copper ring

52
Figure 5.10 Generator 2 terminal peak voltage comparison
Figure 5.11 Generator 2 exciter current comparison

53
Figure 5.12 Generator 2 rotor voltage comparison
Figure 5.13 Generator 3 terminal peak voltage comparison

54
Figure 5.14 Generator 3 exciter current comparison
According to figures shown above, the difference between test measurement and simulation
result is small. When the switcher turns off, spikes are found in Figure 5.10 and Figure 5.13.
They result from the measurement equipment.
The validation of AVR is not included in this report, because the AVR the generators use is
internal. Some parameters, such as PID parameter, are inaccessible.
After building validated generator model, we investigate the expected exciter current
calculation that is mentioned in Section 4.2.2. The different PF value load tests are done on
the simulation model and the test setup. On the setup, the different PF value load tests are
realized by the motor with frequency drive. 0.95, 0.9 and 0.87 PF value are used on the tests.
In the reactive power droop, 5 percent slope is used. In the active power droop, 0 and 4
percent are used. The measured and simulated results are concluded in Table 5.1, 5.2, 5.3
and 5.4.

55
Reactive power droop : 5%
Active power droop : 0%
PF
Active
power(kW)
Reactive
power(kVar)
Measured exciter
current(A)
Simulated exciter
current(A)
Deviation(%)
0.95
6.49 2.31 0.680 0.680 0.000
10.48 3.48 0.760 0.770 -1.316
14.50 4.64 0.874 0.875 -0.114
18.60 5.84 0.991 0.992 -0.101
22.65 7.06 1.103 1.116 -1.179
0.9
6.54 3.22 0.705 0.710 -0.709
10.50 4.97 0.815 0.819 -0.491
14.50 6.73 0.936 0.938 -0.214
18.63 8.51 1.068 1.071 -0.281
22.72 10.31 1.205 1.211 -0.498
0.87
6.55 3.76 0.724 0.729 -0.691
10.53 5.84 0.850 0.847 0.353
14.55 7.98 0.975 0.978 -0.308
18.63 10.10 1.117 1.119 -0.179
22.73 12.24 1.265 1.266 -0.079
Table 5.1 Generator 2 exciter current comparison 1
Reactive power droop : 5%
Active power droop : 4%
PF
Active
power(kW)
Reactive
power(kVar)
Measured exciter
current(A)
Simulated exciter
current(A)
Deviation(%)
0.9
6.53 2.94 0.640 0.644 -0.625
10.51 4.72 0.758 0.761 -0.396
14.50 6.53 0.886 0.892 -0.677
18.56 8.35 1.026 1.031 -0.487
22.69 10.16 1.176 1.181 -0.425
0.87
6.48 3.44 0.662 0.660 0.302
10.50 5.561 0.790 0.788 0.253
14.51 7.74 0.927 0.929 -0.216
18.60 9.94 1.075 1.080 -0.465
22.72 12.12 1.237 1.238 -0.081
Table 5.2 Generator 2 exciter current comparison 2

56
Reactive power droop : 5%
Active power droop : 0%
PF
Active
power(kW)
Reactive
power(kVar)
Measured exciter
current(A)
Simulated exciter
current(A)
Deviation(%)
0.95
6.62 3.78 0.640 0.650 -1.563
10.57 5.85 0.743 0.743 0.000
14.60 7.93 0.851 0.855 -0.470
18.67 10.11 0.975 0.976 -0.103
22.76 12.24 1.112 1.107 0.450
0.9
6.59 3.22 0.679 0.683 -0.589
10.57 4.97 0.793 0.794 -0.126
14.58 6.72 0.923 0.920 0.325
18.62 8.51 1.063 1.059 0.376
22.73 10.31 1.217 1.211 0.493
0.87
6.62 3.32 0.695 0.703 -1.151
10.58 3.46 0.824 0.826 -0.243
14.56 4.70 0.968 0.962 0.620
18.61 5.85 1.119 1.112 0.626
22.67 7.07 1.292 1.270 1.703
Table 5.3 Generator 3 exciter current comparison 1
Reactive power droop : 5%
Active power droop : 4%
PF
Active
power(kW)
Reactive
power(kVar)
Measured exciter
current(A)
Simulated exciter
current(A)
Deviation(%)
0.9
6.50 2.93 0.620 0.624 -0.645
10.48 4.73 0.740 0.745 -0.676
14.53 6.57 0.880 0.886 -0.682
18.59 8.39 1.035 1.036 -0.097
22.70 10.23 1.198 1.196 0.167
0.87
6.50 3.45 0.630 0.642 -1.905
10.49 5.57 0.770 0.776 -0.779
14.53 7.75 0.916 0.926 -1.092
18.60 9.93 1.090 1.086 0.367
22.71 12.16 1.269 1.257 0.946
Table 5.4 Generator 3 exciter current comparison 2

57
5.3 CDG test result
After validating the generators and the expected value calculation, the CDG model in Matlab
Simulink can be transferred to PLC program. The PLC program is written in structure text. The
PLC hardware used here is from Bachmann. Its configuration is shown in Figure 5.15.
Figure 5.15 The PLC configuration
The basic parameter setting of CDG in PLC is concluded in Table 5.5.
Parameters Generator set 2 Generator set 3
Exciatation
System
Detection
Reactive Power First Level
Deviation
3kVar 3kVar
Reactive Power Second
Level Deviation
6kVar 6kVar
Voltage First Level
Deviation
1.5V 1.5V
Voltage Second Level
Deviation
2.8V 2.8V
Exciter Current First Level
Deviation
100mA 100mA
Exciter Current Second
Level Deviation
210mA 210mA
Prime
Mover
Detection
Active Power First Level
Deviation
3.4kW 2.88kW
Active Power Second Level
Deviation
6.8kW 5.76kW
Frequency First Deviation 0.2Hz 0.2Hz
Frequency Second
Deviation
0.45Hz 0.45Hz
Dynamic
Window
Highest Active Power
Boundary
30.6kW 25.9kW
Lowest Active Power
Boundary
0kW 0kW
Highest Reactive Power
Boundary
30.6kVar 30.6kVar
Lowest Reactive Power -2kVar -2kVar

58
Boundary
Time Delay Alarm Time Delay 600ms 600ms
Trip Long Time Delay 1000ms 1000ms
Trip Short Time Delay 500ms 500ms
Table 5.5 The basic parameter setting of CDG
In Table 5.5, we can find out that the reactive power and voltage setting deviation doesn’t
follow the reactive power droop. Also, the active power and frequency setting deviation doesn’t
follow the active power droop. The reason why we use the nonlinear deviation setting is that
the dynamic responses of the generator sets during the faults may affect the performance of
CDG, and the nonlinear setting is to reduce the influence from dynamic responses of the
generator sets on CDG.
The voting system doesn’t include here, because it cannot be used when only two generator
are running parallel. It will be enabled, when three generator sets are running parallel.
After finishing the PLC program writing and setting, some kinds of excitation system faults
and prime mover faults can be implemented to test CDG. In order to prevent the setup from
damage, small faults are implemented on the setup. They are concluded below:
1. AVR set point of generator 3 increases 4V (1% of nominal voltage).
2. AVR set point of generator 3 decreases 4V (1% of nominal voltage).
3. AVR set point of generator 3 increases 8V (2% of nominal voltage).
4. AVR set point of generator 3 decreases 8V (2% of nominal voltage).
5. Speed set point of diesel generator 2 increases 15 rpm.
6. Speed set point of diesel generator 2 decreases 15 rpm.
7. Speed set point of diesel generator 2 increases 30 rpm.
8. Speed set point of diesel generator 2 decreases 30 rpm.
When the CDG finds the fault, it sends alarm and trip signals, but doesn’t give these signals
to the contactors. Because, the healthy generator takes a large load step after tripping, and
this setup doesn’t have fast load reduction protection to prevent generators from overload.
The alarm signal can be reset by CDG, if there is no faulty generator anymore. However, the
trip signal will be self-lock, and it should be reset manually. In the figures below, the
measurements use Y axis on the left side, and the alarm and trip signals use Y axis on the
right side, where 1 is for true and 0 is for false.

59
Figure 5.16, 5.17 and 5.18 show the behaviors of setup and response of CDG when the
AVR set point of generator 3 increases 4V.
Figure 5.16 Reactive power (the AVR set point of generator 3 increases 4V)
Figure 5.17 Voltage (the AVR set point of generator 3 increases 4V)

60
Figure 5.18 Exciter current (the AVR set point of generator 3 increases 4V)
Figure 5.19, 5.20 and 5.21 show the behaviors of the setup and response of CDG when the
AVR set point of generator 3 decreases 4V.
Figure 5.19 Reactive power (the AVR set point of generator 3 decreases 4V)

61
Figure 5.20 Voltage (the AVR set point of generator 3 decreases 4V)
Figure 5.21 Exciter current (the AVR set point of generator 3 decreases 4V)

62
Figure 5.22, 5.23 and 5.24 show the behaviors of the setup and response of CDG when the
AVR set point of generator 3 increases 8V.
Figure 5.22 Reactive power (the AVR set point of generator 3 increases 8V)
Figure 5.23 Voltage (the AVR set point of generator 3 increases 8V)

63
Figure 5.24 Exciter current (the AVR set point of generator 3 increases 8V)
Figure 5.25, 5.26 and 5.27 show the behaviors of the setup and response of CDG when the
AVR set point of generator 3 decreases 8V.
Figure 5.25 Reactive power (the AVR set point of generator 3 decreases 8V)

64
Figure 5.26 Voltage (the AVR set point of generator 3 decreases 8V)
Figure 5.27 Exciter current (the AVR set point of generator 3 decreases 8V)
During the normal operation, small deviation is found in the reactive power, voltage and
exciter current. The reason why there is reactive power deviation is that generator 2 and 3 use
different kinds of AVR that have different measurement accuracy. Therefore, they lead the
generators not to share reactive power evenly. And the deviation in voltage results from the
unbalance reactive power load sharing. Moreover, in the normal operation, the deviation in
exciter current exists, and the values of it are larger than those in tables in Section 5.2. It is
because the generator temperatures are different among these tests, and magnetic hysteresis
works. Even though there are deviations during the normal operation, they are small and in
acceptable range.

65
When the deviation is larger than the first level deviation, the alarm will send out. When the
deviation is larger than the second level deviation or the generator runs out of dynamic window,
the trip alarm will send out. We can find that the response time of voltage is much shorter than
those of reactive power and exciter current. The alarm and trip signals are all triggered by
voltage deviation
Figure 5.28 and 5.29 show the behavior of the setup and response of CDG when the speed
set point of diesel generator 2 increases 15 rpm.
Figure 5.28 Active power (the speed set point of diesel generator 2 increases 15 rpm)
Figure 5.29 Frequency (the speed set point of diesel generator 2 increases 15 rpm)

66
Figure 5.30 and 5.31 show the behaviors of the setup and response of CDG when the speed
set point of diesel generator 2 decreases 15 rpm.
Figure 5.30 Active power (the speed set point of diesel generator 2 decreases 15 rpm)
Figure 5.31 Frequency (the speed set point of diesel generator 2 decreases 15 rpm)

67
Figure 5.32 and 5.33 show the behaviors of setup and response of CDG when the speed set
point of diesel generator 2 increases 30 rpm.
Figure 5.32 Active power (the speed set point of diesel generator 2 increases 30 rpm)
Figure 5.33 Frequency (the speed set point of diesel generator 2 increases 30 rpm)

68
Figure 5.34 and 5.35 show the behaviors of the setup and response of CDG when the speed
set point of diesel generator 2 decreases 30 rpm.
Figure 5.34 Active power (the speed set point of diesel generator 2 decreases 30 rpm)
Figure 5.35 Frequency (the speed set point of diesel generator 2 decreases 30 rpm)
In the normal operation, the deviation in active power is much smaller than the deviation in
reactive power. It is because the same kind motors and frequency drives are used for both
generator sets. And the response time of frequency is much shorter than that of active power.
The alarm and trip signals are all triggered by the frequency deviation.

69
6. Future work and conclusion
6.1 Future work
CDG is still a quite important protection system when the marine power system runs under
closed bus-tie configuration. Therefore, more researches are required for CDG. The Simulink
marine power system model also should be improved.
Regarding the diesel generator model, the diesel engine model is required to improve. It is
interesting to validate the dynamic performance of diesel engine and the fuel consumption of
the diesel engine. The paper from A. A. L.Guzzella and the delft model DE4A can be as the
reference.
Several kinds of AVR are used by Bakker Sliedrecht. Therefore, building validated AVR
models is also important. With the help of the validated AVR model, the company can tune the
PID parameters easily.
According to the CDG test results, some deviation in exciter current can be found during the
normal operation. This exciter current deviation results from the generator temperature and the
magnetic hysteresis. Therefore, the expected exciter current calculation should take the
generator temperature and the magnetic hysteresis into account.
In the master thesis, the PLC program and CDG setting are designed for 2 parallel
generator sets. The setup is designed as 3 parallel generator sets. Therefore, when the whole
setup finishes, the PLC program and CDG setting should be updated.
6.2 Conclusion
The closed bus-tie configuration in marine power system is a good method to help the
vessel owners to decrease fuel consumption. However, when the vessel is running under
closed bus-tie configuration, excitation system faults and prime mover faults can trigger a
blackout on the vessel. This master thesis is to design a system to detect the faulty generator
and prevent vessels from a blackout. This system is named as CDG.
In order to have a better understanding of the excitation system faults and prime mover
faults, validated diesel generator model and parallel diesel generator sets model are built. By
simulating many kinds of faults and normal operations, the performances of healthy and faulty
generators are concluded. By analyzing these performances, boundaries between healthy and

70
faulty generators are found. According to the boundary analysis, the CDG simulation block is
built and tested.
According to the aims of this master thesis, The CDG is designed for the commercial use.
Therefore, the validation of CDG is implemented. There are three steps to finish the CDG
validation. The first step is to build a two parallel generator sets setup. The second step is to
build validated generators and CDG model for the setups. The last step is to transfer the CDG
simulation block to PLC program and test CDG PLC program on the setup. Based on the test
results, the performance of CDG is in the expectation.

71
7. Bibliography
[1] IMCA, "A Guide to DP Electrical Power Control Systems," International Marine
Contractors Association (IMCA), 2012.
[2] A. J.S, "Marine System Analysis," Norwegain University of Technology, 2013.
[3] A. K. Adnanes, "Maritime Electrical Installations and Diesel Electric Propulsion," ABB
marine AS, 2003.
[4] D. R. Stig Olav Settemsdal, "DP3 Class power system solution for dynamically positioned
vessels," Dynamic Positioning Conference , 2007.
[5] Hansen, "Modelling and Control of Marine Power Systems," Norwegian University of
Technology, 2000.
[6] T. A. Pedersen, "Bond graph modelling of marine power system," Norwegain University of
Technology, 2009.
[7] D. Radan, "Integrated control of marine electrical power systems," Norwegian University
of Technology, 2008.
[8] P. Johannessen, "Advanced Failure Detection and Handling in Power Management
System," Dynamic Positioning Conference , 2009.
[9] S. Cargill, "A noval solution to common mode failure in DP Class 2 power plant," Dynamic
Positioning Conference , 2007.
[10] A. m. automation, "Diesel Generator Monitoring System (DGMS)," ABB.
[11] P.Kunmar, Power System Stability and Control, McGraw-Hill.
[12] A. F. P.M. Anderson, Power System Control and Stability (Second Edition), IEEE Press,
2000.
[13] G. Shackshaft, "New Approach to the determination of synchronous machine parameters
from tests," PROC.IEE, 1974.
[14] B. Electric, "DECS-250 instruction manual," Basler Electric, 2013.
[15] I. S. B. IEEE Power Engineering Society. Energy Development and Power Generation
Committee, IEEE Recommended Practice for Excitation System Models for Power
System Stability Studies, IEEE, 2005.
[16] A. A. L.Guzzella, "Control of Diesel Engine," IEEE Control Systems, 1998.
[17] Woodward, "Governor Fundamental and Power Management Reference Manual,"
Woodward.
[18] W. F. Oy, "Installation Planning Instruction," Wartsila, 2014.
[19] I. E. M. Committee, "IEEE Guide for Test Procedures for Synchronous Machines," IEEE,
2009.
[20] "Electrical installations of ships and mobile and fixed offshore units," IEC, 1998.
[21] K. Valkeejarvi, "The ship's electrical network ,engine control and automation," Wartsila
Marine Technology.

72
[22] "Power Plant Common Cause Failures," Dynamic Positioning Committee, 2012.
[23] P. Sen, Principles of electric machine and power electronics (Second Edition), John
Wiley&Son, 1998.
[24] J. J.Grainger, Power System Analysis, McGraw-Hill, 1994.

73
Appendix A Generator datasheet is given in Figure A.1.
Figure A.1 Generator datasheet

74
Appendix B
Regarding the excitation system faults, the simulation results of Fault 3, 4, 5, 6 and 7 are
shown in Figure B.1, B.2, B.3, B.4 and B.5.
Figure B.1 Fault3 (AVR increase to maximum), simulation results

75
Figure B.2 Fault4 (Exciter stator open circuit), simulation results

76
Figure B.3 Faul5 (Exciter stator short circuit), simulation results

77
Figure B.4 Fault6 (main generator rotor open circuit), simulation results

78
Figure B.5 Fault7 (main generator rotor short circuit), simulation results

79
Regarding the prime mover faults, the simulation results of Fault 10, 11 and 12 are shown in
Figure B.6, B.7 and B.8.
Figure B.6 Fault10 (diesel engine takes full load), simulation results

80
Figure B.7 Fault11 (diesel engine takes no load), simulation results

81
Figure B.8 Fault12 (diesel engine is blocked), simulation results

82
Appendix C
Regarding the excitation system faults, the deviation of Fault 3, 4, 5, 6 and 7 are shown in
Figure C.1, C.2, C.3, C.4 and C.5.
Figure C.1: Fault3 (AVR output increases to maximum), the deviation of parameters

83
Figure C.2: Fault4 (Exciter stator open circuit), the deviation of parameters

84
Figure C.3: Fault5 (Exciter stator short circuit), the deviation of parameters

85
Figure C.4: Fault6 (main generator rotor open circuit), the deviation of parameters

86
Figure C.5: Fault7 (main generator rotor short circuit), the deviation of parameters

87
Regarding the prime mover faults, the deviation of Fault 10, 11 and 12 are shown in Figure
C.6, C.7 and C.8.
Figure C.6: Fault10 (diesel engine takes full load), the deviation of parameters

88
Figure C.7: Fault11 (diesel engine takes no load), the deviation of parameters

89
Figure C.8: Fault12 (diesel engine is blocked), the deviation of parameters

90
Appendix D Generator 2 datasheet is given in Figure D.1.
Figure D.1 Generator 2 datasheet

91
Appendix E Generator 3 datasheet is given in Figure E.1.
Figure E.1 Generator 3 datasheet