Cognitive Colonization Tony Stentz, Martial Hebert, Bruce Digney, Scott Thayer Robotics Institute...
22
Cognitive Colonization Tony Stentz, Martial Hebert, Bruce Digney, Scott Thayer Robotics Institute Carnegie Mellon University
-
date post
20-Dec-2015 -
Category
Documents
-
view
216 -
download
0
Transcript of Cognitive Colonization Tony Stentz, Martial Hebert, Bruce Digney, Scott Thayer Robotics Institute...
Cognitive Colonization
Tony Stentz, Martial Hebert,
Bruce Digney, Scott Thayer
Robotics Institute
Carnegie Mellon University

Requirements
Distributed robotics for small-scale mobile robots calls for a software system that:
• is robust to individual robot failure;
• does not depend on reliable communications;
• can perform global tasks given the limited sensing and computational capabilities of individual robots;
• learn to perform better through experience.

Cognitive Colonization Paradigm
The proposed software system addresses these requirements by:
• dynamically assigning robots to tasks and checkpointing data;
• treating communication as an opportunistic resource;
• aggregating resources by distributing the computational and perceptual load across the group of robots;
• sharing learned behaviors (both individual and group) between all robots.

Software Architecture
Command Unit
MobileRobot
MobileRobot Mobile
Robot
MobileRobot
MobileRobot
MobileRobot
Squad Level
MobileRobot
MobileRobot
MobileRobot
Squad Level
MobileRobot
MobileRobot
MobileRobot
MobileRobot

Example: Distributed Mapping
Unattached Robot
SingleRobot
Command Unit
Mapping Squad
Mapping Squad
Communications Squad
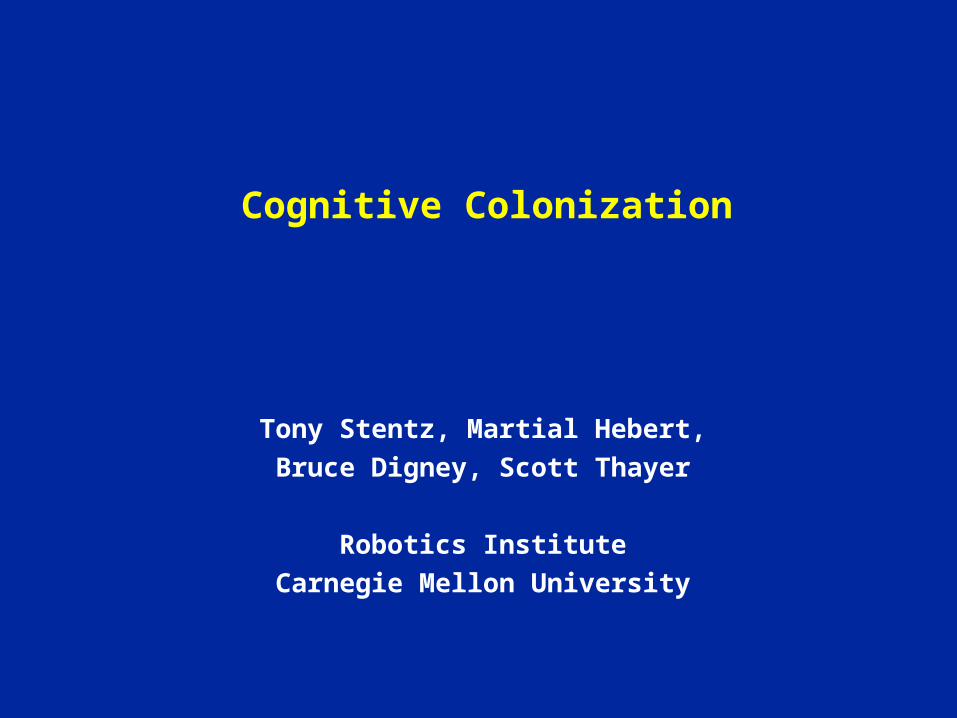
Colony Level
Objectives:
Adaptations:
Planning:
Data Acquired:
Subordinates:
Behaviors:
- directives
- positions- health
- world map
- merge- split- grow- regions to map- comm areas to maintain
- all known behaviors
- aggregate adapted behaviors

Squad Level
Objectives:
Adaptations:
Planning:
Data Acquired:
Subordinates:
Behaviors:
- map a portion- commlink
- positions- data quality- comm quality
- local map
- more comm squads- positions- fields of view
- maintain internal comm- maintain external comm- re-establish comm- map a region
- better mapping strategies- better comm strategies
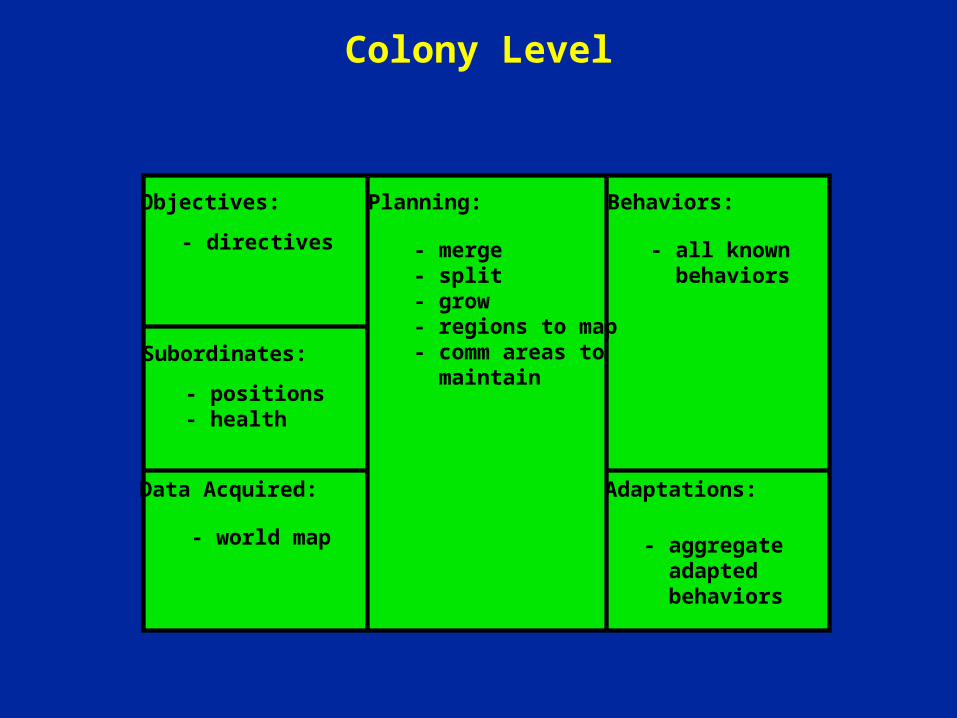
Robot Level
Objectives:
Adaptations:
Planning:
Data Acquired:
Subordinates:
Behaviors:
- take sensor data- relay data
- position- health
- sensor data- comm data
- safeguarding- maintain comm- re-establish comm- bootstrap colony
- better nav- better comm
Deliverables
• Reactive behaviors
• Communications protocols and strategies
• Resource allocation strategies
• Learning algorithms
• Planning algorithms
• Demonstration systems

Schedule
Robust Colonization
Port to Military Platforms
ColonizationDynamics
2000 2001 2002 2003
StaticColonization

DARPA Demo II Project

GRAMMPS: Initial Plan

GRAMMPS: Swapping Goals
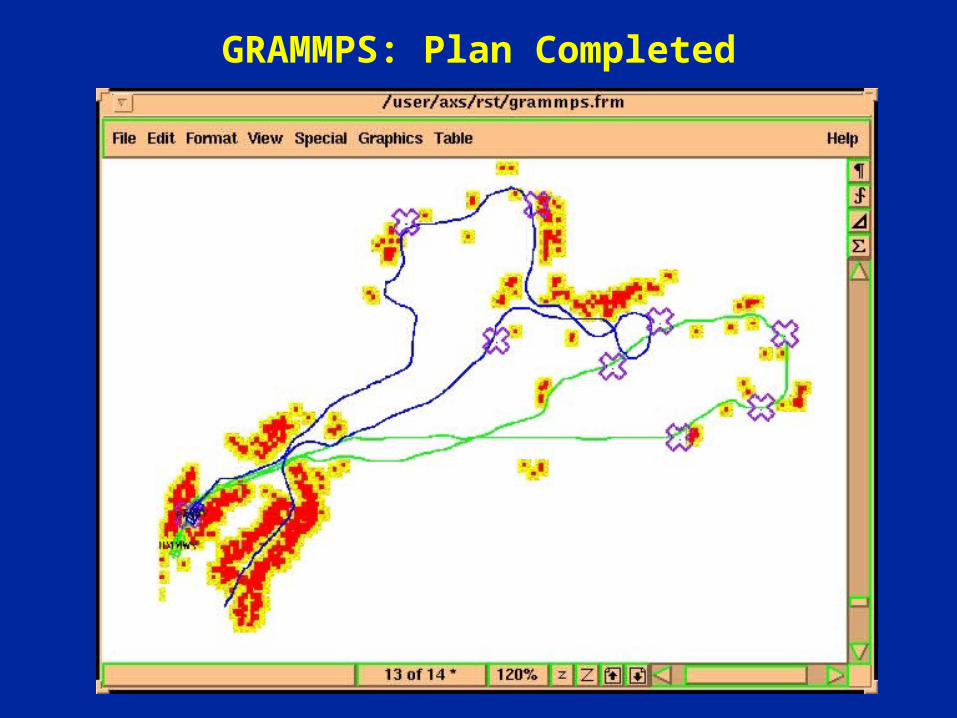
GRAMMPS: Plan Completed

Chornobyl Nuclear Power Plant

Pioneer Robot
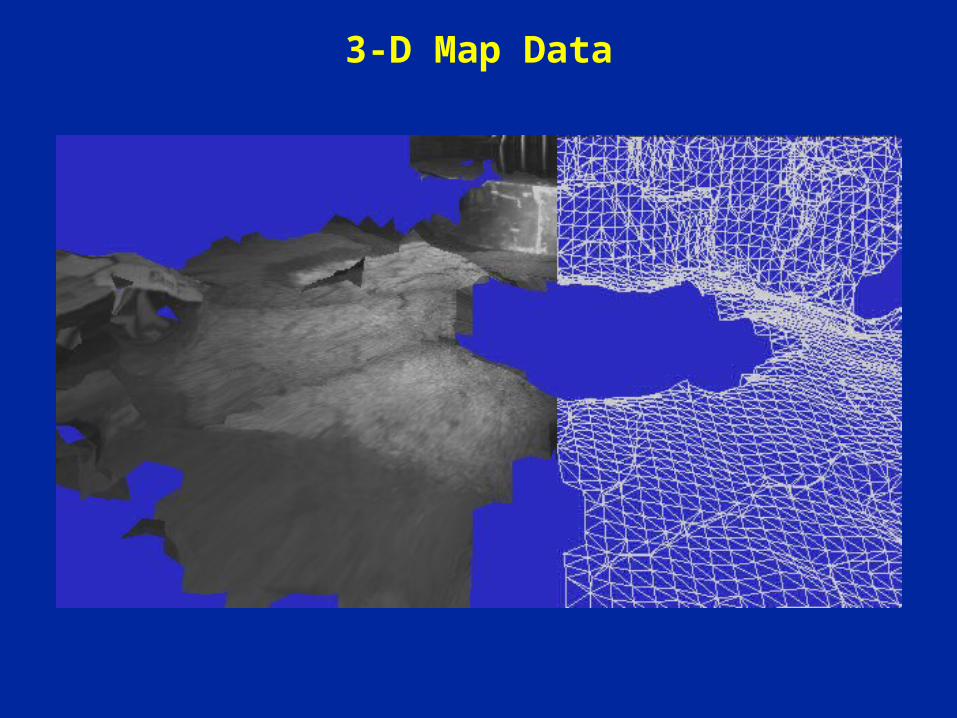
3-D Map Data

New Ideas
• Distributed control architecture for formation of new robot colonies.
• Probabilistic model of robot existence.
• “In-situ” group learning, behavior exchange, skill swapping.
• Multiple colony dynamics.

Learning Hierarchical Control Structures
Primitive Actions
Sen
sors
an
d R
ein
forc
emen
t S
ign
als
Flat Structure Hierarchical Structure
Learning Control System Learning Control System
Behavior BehaviorS
enso
rs a
nd
Rei
nfo
rcem
ent
Sig
nal
s
Primitive Actions
Behavior Behavior
Behavior Behavior
Behavior Behavior

Generating Lower SkillsNew Task
New Task
World Change
World Change
0
-50
-100
-150
-200
-250
-300
0
-50
-100
-150
-200
-250
-3000 50 100 150 200 250 300 350
0 50 100 150 200 250 300 350TIME
TIME
PE
RF
OR
MA
NC
EP
ER
FO
RM
AN
CE
HIERARCHICAL
FLAT
Benefits of Hierarchical Learning
• Decomposed behaviors transfer between tasks, environments and robots
• Confines disruptions to only levels affected
• Generates levels of abstraction
• Suitable for robot pretraining

Behavior Learning in Colonies
• Can use shared experiences/information to speed learning
• Applicable to both individual robots, squads and command units
• Suitable for exploration with robot death/sacrifice