CMU/Robotics Institute | 16-899D Fall 2005
24
Illah Nourbakhsh The Mobot Museum Series Robots Illah Nourbakhsh CMU/Robotics Institute | 16-899D Fall 2005
Transcript of CMU/Robotics Institute | 16-899D Fall 2005

Illah Nourbakhsh
The Mobot Museum Series Robots
Illah NourbakhshCMU/Robotics Institute | 16-899D Fall 2005

Illah Nourbakhsh
Goals
24 x 7 Unsupervised Robot AutonomyDiagnostic state identification & behavior
HRI Iterative Testing and RefinementInteraction with truly naïve users
Educational Efficacy AnalysisClear, quantifiable educational objective
Long Timescale Deployment (> 1 year)Nilsson’s robotics grand challenge
Illah Nourbakhsh
Related Work
Contemporary museum robot effortsRhino, Bonn (Germany)Minerva, Washington (USA)Traveling Robotics exhibitsMany others…
Recent public interactive human-scale robotsSwiss Expo: EPFL’s RoboxGerman Expo: roving multimedia robotsMany others…

Illah Nourbakhsh
Human-scale InteractionGrange, Meyer, Soto, Kunz, Willeke
Educational tours in public spaces.

Illah Nourbakhsh
Human-scale InteractionGrange, Meyer, Soto, Kunz, Willeke
Educational tours in public spaces.

Illah Nourbakhsh
Human-scale InteractionGrange, Meyer, Soto, Kunz, Willeke
Educational tours in public spaces.

Illah Nourbakhsh
Interaction Design Process
Educational design: education divisionContent development: production companyBehavior specification: education divisionFormative evaluations and re-design
robot observation, human observationinterviews, written tests
Illah Nourbakhsh
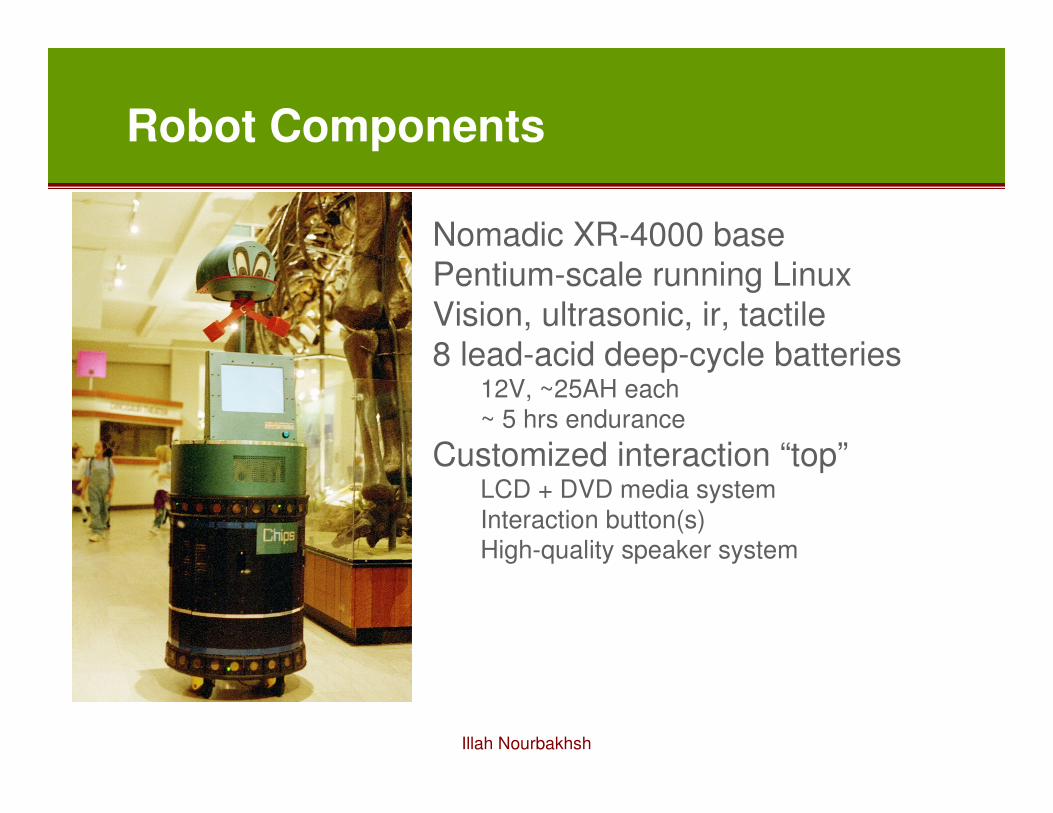
Robot Components
Nomadic XR-4000 basePentium-scale running LinuxVision, ultrasonic, ir, tactile8 lead-acid deep-cycle batteries
12V, ~25AH each~ 5 hrs endurance
Customized interaction “top”LCD + DVD media systemInteraction button(s)High-quality speaker system

Illah Nourbakhsh
Chips
Carnegie Museum of Natural HistoryAutonomy
5 years, > 500 km navigated, auto-dockingMTBF convergence at 1 weekProactive health state identification

Illah Nourbakhsh
Chips - BBC

Illah Nourbakhsh
Sweetlips
Hall of North American Wildlife3 years, > 185 km navigatedTour theme interaction

Illah Nourbakhsh
Joe Historybot
Heinz History Center2 years, > 160 kmTouchscreen, quiz,
speech generation

Illah Nourbakhsh
Adam 40-80
Free-agent robot for hireMore than 30 days of work
finishedRepublican National Conv.Democratic National Conv.

Illah Nourbakhsh
Analysis of Evolution
Robot Autonomy & VisionInteraction and Education Efficacy

Illah Nourbakhsh
Robot Autonomy Trends
Convergence of safety levelRedundant case-based minimal vectorsPath-level control as on-line search in safety zones
Diagnostic TransparencyVision camera + gdbTrends toward specificity of state identificationUndo – then - Retry methods
NavigationMetrical route-level constraints on safe areasTopological landmark-based route mapExplicit confidence measured on visual fiducials

Illah Nourbakhsh
Landmarks: Visual Fiducials

Illah Nourbakhsh
Human-Robot Interaction Trends
Lower soliloquoy durationCaricatured exaggeration of awarenessInteraction bandwidth & specificityUnidirectional – bidirectional - active queryModifying human behavior
social inclusion experiments

Illah Nourbakhsh
Human-Robot Interaction: Awareness
Chips: Push my button to start.Joe: Hey! Hi! Hello!Adam: Look out, here I come!

Illah Nourbakhsh
Human-Robot Interaction: Retention
Chips: 3-minute dino-talksSweetlips: Which tour do you want?Joe: Learn to speak Pittsburghese! Guess how
much that bell weighs?Adam: Participate in a poll. Test your knowledge
of presidential politics!

Illah Nourbakhsh
Measuring Interaction Performance
1 Quantifiable Observationtime on task: 74% at 5 – 15 min.peak ages: 5 – 12 ; 25 – 34gender: 20% more girls

Illah Nourbakhsh
Measuring Interaction Performance
2 Educational Efficacy.5 .9 All dinosaurs lived during same period..5 .7 All dinosaurs were huge animals..5 .8 Other animals lived on the Earth with din..4 .8 All dinosaurs were carnivorous..4 .7 Scientists agree how to assemble bones..4 .5 All bones in Dinosaur hall are real.

Illah Nourbakhsh
RAVEN in the National AviaryRobot and educator collaboration

Illah Nourbakhsh
Conclusion
Autonomy: general methodology leads to robust behavior
HRI: We influence both robotic and human behavior with proper design
Project Closure: the shortcomings of robotic tour guides.

Illah Nourbakhsh
Influencing Human Behavior…